
Возвратно-поступательный механизм, как сделать своими руками
Усилие от источника к исполнительному органу может передаваться самым различным образом. Довольно большое распространение получили варианты исполнения, предназначение которых заключается в преобразовании вращательно движения в возвратно-поступательное. Подобный механизм сегодня устанавливается крайне часто. Рассмотрим разновидности, область применения и многие другие моменты подробнее.
Механизм возвратно-поступательного движения
Передача усилия от источника к конечному устройству может проводится самым различным образом. Возвратно поступательный механизм обладает следующими особенностями:
- В большинстве случаев он устанавливается при создании обрабатывающего оборудования, к примеру станка, у которого инструмент может одновременно получать вращение и перемещаться в нескольких плоскостях.
- Создаваемая конструкция должна быть рассчитана на достаточно длительный эксплуатационный срок.
 Для этого используется износостойкий материал, который может выдержать длительное воздействие.
Для этого используется износостойкий материал, который может выдержать длительное воздействие. - Уделяется внимание длительности эксплуатации. Привод может служить определенное количество циклов или времени.
- Немаловажным параметром назовем компактность. Слишком большие механизмы возвратно-поступательного движения увеличивают вес конструкции, делают ее более громоздкой.
- Ремонтопригодность считается важным параметром, который должен учитываться. При длительной эксплуатации приходится проводить замену износившихся элементов.
 Для этого используется износостойкий материал, который может выдержать длительное воздействие.
Для этого используется износостойкий материал, который может выдержать длительное воздействие.
Основные эксплуатационные характеристики во многом зависят от принципа действия механизма возвратно-поступательного перемещения. Именно поэтому следует каждый рассматривать подробно.
Типы передач для поступательного движения
Встречается довольно большое количество различных устройств, которые могут применяться для преобразования передаваемого усилия. Большое распространение получили следующие варианты:
Большое распространение получили следующие варианты:
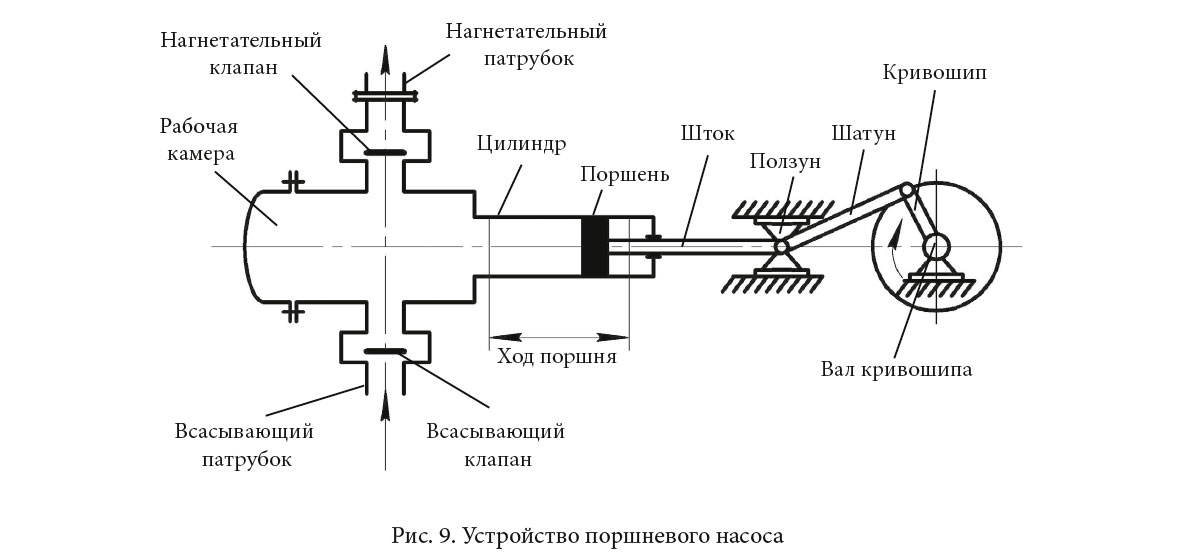
- Кривошипно-шатунные может применяться для преобразования вращения в возвратно-поступательное движение и наоборот. В качестве основных элементов применяется кривошипный вал, ползун, шатун и специальный элемент кривошипа. Для расчета момента и других параметров могут использоваться различные формулы. В качестве основного элемента также могут использовать коленчатый вал, который имеет одну или несколько ступеней. Они получили весьма широкое распространение, к примеру, двигатели или насосы, сельскохозяйственная техника. При изготовлении основных деталей, как правило, применяется сталь с высокой коррозионной стойкостью.
- Кулисные конструкции получили весьма широкое распространение, так как усилие передается без шатуна. В подобном случае ползун напоминает кулису, в которой делается специальное отверстие. На момент вращения кривошипного вала кулиса двигается вправо и налево. В некоторых случаях вместе кулисы применяется стержень с насаженной втулкой. Для обеспечения контакта применяется прижимная пружина. Существенно повысить качество работы устройства можно за счет установки ролика на конце устройства.
- Кулачковые варианты исполнения применяются для преобразования вращательного перемещения в возвратно-поступательное. Основным элементом конструкции можно назвать кулачки, а также стержень, криволинейный диск. Для направления положения стержня устанавливается втулка, которая характеризуется весьма высокой точностью позиционирования. Снизить степень трения поверхности можно за счет ролика. В некоторых случаях вместо стержня устанавливается касающийся рычаг. Основные параметры могут быть рассчитаны самостоятельно. Механизм возвратно-поступательного движения рассматриваемого типа применяется в самых различных случаях, к примеру, в механизированном оборудовании.
- Шарнирно-рычажные устройства устанавливаются в том случае, если нужно сменить направление движение в какой-либо части устройства. Примером можно назвать ситуация, когда вертикальное перемещение следует перенаправлять в горизонтальное. Кроме этого, в некоторых случаях нужно провести увеличение или уменьшение хода.
 Для обеспечения контакта применяется прижимная пружина. Существенно повысить качество работы устройства можно за счет установки ролика на конце устройства.
Для обеспечения контакта применяется прижимная пружина. Существенно повысить качество работы устройства можно за счет установки ролика на конце устройства. Кроме этого, в некоторых случаях нужно провести увеличение или уменьшение хода.
Кроме этого, в некоторых случаях нужно провести увеличение или уменьшение хода.Приведенная выше информация указывает на то, что встречается просто огромное количество различных вариантов исполнения механизмов. Выбор проводится по самым различным критериям, которые должны учитываться.
Устройство для преобразования возвратно-поступательного движения в прямолинейное
Также механизмы возвратно поступательного движения могут применяться для создания условий прямолинейного перемещения исполнительного органа. Ключевыми моментами подобного варианта исполнения назовем:
- Существенно повышается надежность.
- При изготовлении применяются материалы, характеризующие повышенной износостойкостью.
- Подобные механизмы несколько схожи с теми, которые проводят преобразование вращения в возвратно-поступательное перемещение.
Многие конструкции работают на основе применения прямолинейного перемещения. Именно поэтому они получили весьма широкое распространение.
Возвратно-поступательный механизм своими руками
Существенно сэкономить можно путем создания возвратно-поступательного механизма своими руками. В некоторых случаях его делают из дрели, в других для передачи вращающего крутящего момента используется электрический двигатель.
Особенностями назовем нижеприведенные моменты:
- Большинство конструкций самостоятельно изготовить не получается, так как требуемые детали характеризуются высокой сложностью. Примером можно назвать сочетание кривошипного вала и шестерни.
- Во всех случаях должны проводится расчеты, так как в противном случае обеспечить требуемые параметры не получается.
- Изготовить конструкцию рассматриваемого типа можно только при наличии специального оборудования. Если устройство сделано своими силами, то его реальные параметры от расчетных могут существенно отличаться.
В целом можно сказать, что рассматриваемая задача довольно сложна в исполнении. Именно поэтому работу должны проводить исключительно профессионалы, которые могут провести сложные расчеты, а также изготовить требуемые детали.
Область применения
Привод рассматриваемого типа встречаются в самых различных областях. При этом:
- Чаще всего привод устанавливается в станке, предназначенный для обработки металла и дерева.
- Некоторые инструмента также основаны на преобразовании вращательного движения в возвратно-поступательное. Примером можно назвать ударную дрель или перфораторы, которые сегодня распространены.
- В промышленности можно встретить транспортеры, конструкции для подъема и опускания различного продукта.
Единственным, но существенным недостатком можно назвать довольно большие размеры устройства. Кроме этого, нужно обеспечивать качественную смазку, так как трение становится причиной нагрева и износа.
Возвратно-поступательный механизм, как сделать своими руками
Примеры устройств [ править | править код ]
Принцип поступательного движения реализован в чертёжном приборе — пантографе, ведущее и ведомое плечо которого всегда остаются параллельными, то есть движутся поступательно. При этом любая точка на движущихся частях совершает в плоскости заданные движения, каждая вокруг своего мгновенного центра вращения с одинаковой для всех движущихся точек прибора угловой скоростью.
При этом любая точка на движущихся частях совершает в плоскости заданные движения, каждая вокруг своего мгновенного центра вращения с одинаковой для всех движущихся точек прибора угловой скоростью.
Существенно, что ведущее и ведомое плечо прибора, хотя и движущиеся согласно, представляют собой два разных тела. Поэтому радиусы кривизны, по которым движутся заданные точки на ведущем и ведомом плече могут быть сделаны неодинаковыми, и именно в этом и заключается смысл использования прибора, позволяющего воспроизводить любую кривую на плоскости в масштабе, определяемом отношением длин плеч.
По сути дела пантограф обеспечивает синхронное поступательное движение системы двух тел: «читающего» и «пишущего», движение каждого из которых иллюстрируется приведённым выше чертежом.
Поступательное движение — это механическое движение твёрдого тела, при котором любой отрезок прямой, жестко связанный с движущимся телом, остается параллельным своему первоначальному положению.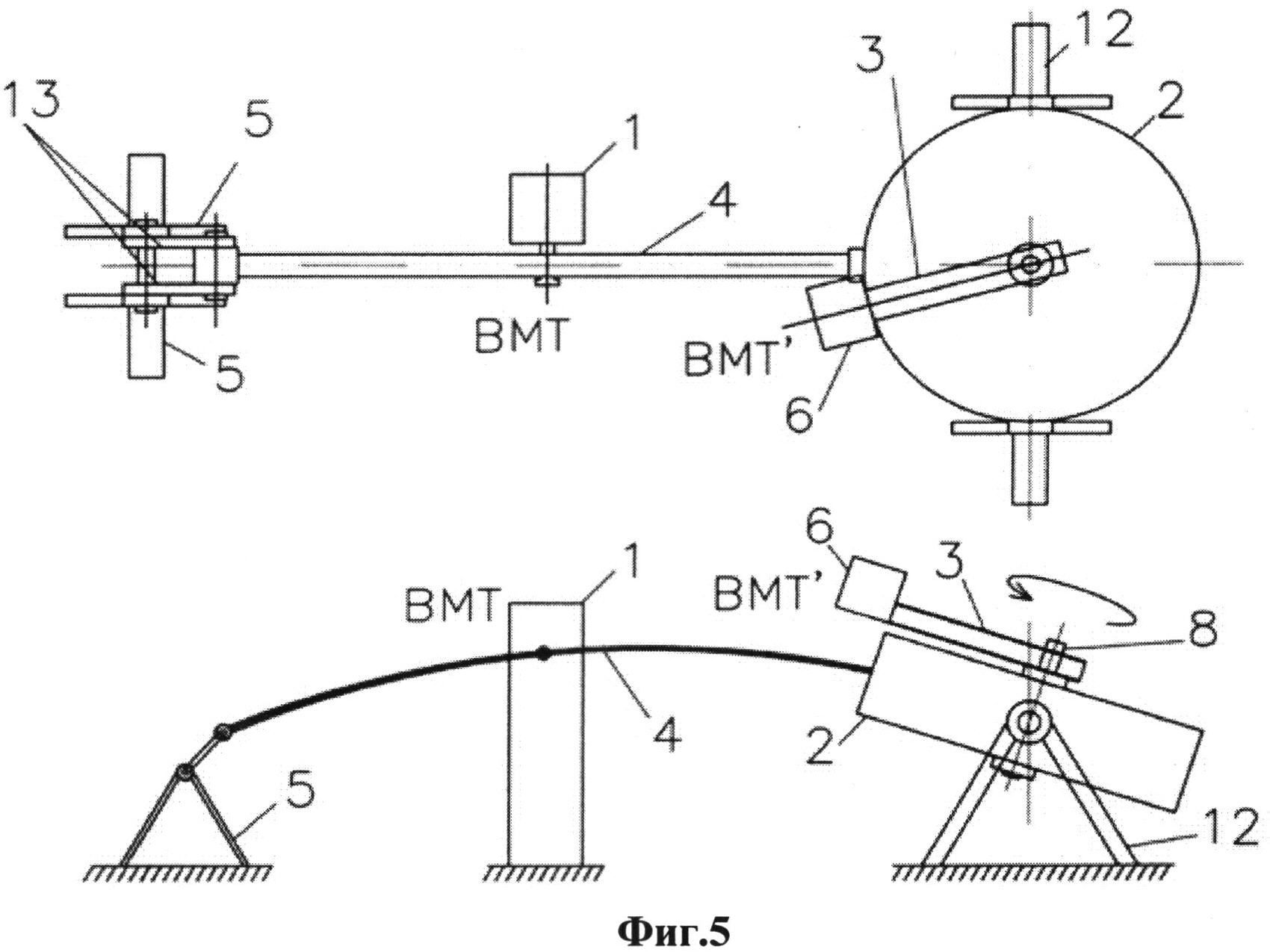
Одной из важнейших характеристик движения точки является её траектория, в общем случае представляющая собой пространственную кривую, которую можно представить в виде сопряженных дуг различного радиуса, исходящего каждый из своего центра, разного для разных точек тела положение которого может меняться во времени.
В частном случае прямая может рассматриваться как дуга, радиус которой в данных условиях может считаться равным бесконечности.А движение по произвольной траектории -как набор сопряжённых дуг.
В таком случае оказывается, что при поступательном движении в каждый заданный момент времени любая точка тела совершает поворот вокруг своего мгновенного центра поворота, причём длина радиуса в данный момент одинакова для всех точек тела. Одинаковы по величине и направлению и векторы скорости точек тела, а также испытываемые ими ускорения.
Однако, поскольку траектория является понятием, относящимся к области кинематики, и не содержит информации о скоростях, в общем случае она не даёт представления ни о величине испытываемых материальной точкой сил, ни об их направлении.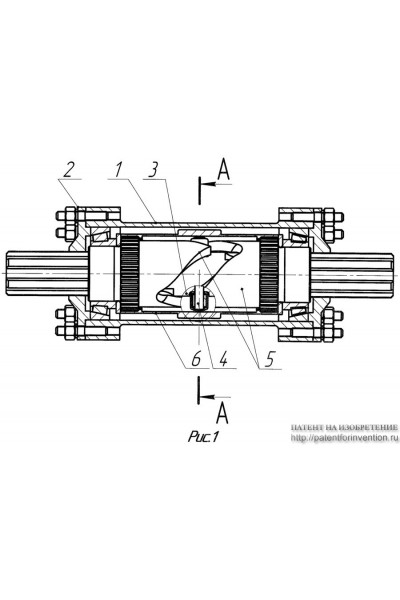
Тем не менее возможны случаи, когда по условиям задачи бывает достаточно изучить движение одной какой-то произвольной материальной точки тела (например, движение центра масс тела).
Поступательно движется, например, кабина лифта или кабина колеса обозрения.
В общем случае поступательное движение происходит в трёхмерном пространстве, но его основная особенность -сохранение параллельности любого отрезка самому себе, остаётся в силе.
Математически поступательное движение эквивалентно параллельному переносу.
При решении задач теоретической механики бывает удобно рассматривать движение твердого тела как суперпозицию движения центра масс тела и вращательного движения самого тела вокруг центра масс (теорема Кёнига).
Усилие от источника к исполнительному органу может передаваться самым различным образом. Довольно большое распространение получили варианты исполнения, предназначение которых заключается в преобразовании вращательно движения в возвратно-поступательное. Подобный механизм сегодня устанавливается крайне часто. Рассмотрим разновидности, область применения и многие другие моменты подробнее.
Подобный механизм сегодня устанавливается крайне часто. Рассмотрим разновидности, область применения и многие другие моменты подробнее.
Классификация механических передач
Машиностроителями принято несколько классификаций в зависимости от классифицирующего фактора.
По принципу действия различают следующие виды механических передач:
- зацеплением;
- трением качения;
- гибкими звеньями.
По направлению изменения числа оборотов выделяют редукторы (снижение) и мультипликаторы (повышение). Каждый из них соответственно изменяет и крутящий момент (в обратную сторону).
По числу потребителей передаваемой энергии вращения вид может быть:
- однопотоковый;
- многопотоковый.
Классификация механических передач
По числу этапов преобразования – одноступенчатые и многоступенчатые.
По признаку преобразования видов движения выделяют такие типы механических передач, как
- Вращательно-поступательные. Червячные, реечные и винтовые.
- Вращательно-качательные. Рычажные пары.
- Поступательно-вращательные. Кривошипно-шатунные широко применяются в двигателях внутреннего сгорания и паровых машинах.
 Червячные, реечные и винтовые.
Червячные, реечные и винтовые.Для обеспечения движения по сложным заданным траекториям используют системы рычагов, кулачков и клапанов.
Область применения
Кулисные механизмы находят применение в тех устройствах и установках, где требуется преобразовать вращение или качание в продольно- поступательное перемещение или сделать обратное преобразование.
Наиболее широко они используются в таких металлообрабатывающих станках, как строгальные и долбежные
Важное преимущество кулисно-рычажного механизма, заключается в его способности обеспечивать высокую скорость движения на обратном ходе. Это дает возможность существенно повысить общую производительность оборудование и его энергоэффективность, сократив время, затрачиваемое на непроизводительные, холостые движения рабочих органов
Здесь же находит применение кулисный механизм с регулируемой длиной ползуна. Это позволяет наилучшим образом настаивать кинематическую схему исходя из длины заготовки.
Это позволяет наилучшим образом настаивать кинематическую схему исходя из длины заготовки.
Механизм конхоидального типа применяется в легком колесном транспорте, приводимом в действие ножной мускульной силой человека- так называемом шагоходе. Человек, управляющий машиной, имитируя шаги, поочередно нажимает на педали механизма, закрепленные на оси с одного конца. Кулисная пара преобразует качательное движение во вращение приводного вала, передаваемое далее цепным или карданным приводом на ведущее колесо.
В аналоговых вычислительных машинах широко применялись так называемые синусные и тангенсные кулисные механизмы. Для визуализации различных функции в них применяются ползунные и двухкулисные схемы. Такие механизмы использовались в том числе в системах сопровождения целей и наведения вооружений. Их отличительной чертой являлась исключительная надежность и устойчивость к неблагоприятным воздействиям внешней среды (особенно- электромагнитных импульсов) на фоне достаточной для решения поставленных задач точности. С развитием программных и аппаратных средств цифровой техники область применения механических аналоговых вычислителей сильно сократилась.
Такие механизмы использовались в том числе в системах сопровождения целей и наведения вооружений. Их отличительной чертой являлась исключительная надежность и устойчивость к неблагоприятным воздействиям внешней среды (особенно- электромагнитных импульсов) на фоне достаточной для решения поставленных задач точности. С развитием программных и аппаратных средств цифровой техники область применения механических аналоговых вычислителей сильно сократилась.
Еще одна важная сфера применения кулисных пар- устройства, в которых требуется обеспечить равенство угловых скоростей кулис при сохранении угла между ними. Муфты, в которых допускается неполная соосность валов, системы питания автомобильных двигателей, устройство реверса на паровом двигателе.
Область применения
Сегодня храповик как деталь применяется при создании различных промышленных агрегатов с компонентами инженерных конструкций. При этом может обеспечиваться стабильная работа различных небольших элементов инструментов. Этот момент указывает на универсальность применения храповых механизмов.
Этот момент указывает на универсальность применения храповых механизмов.
С точки зрения технической интеграции устройство обходит многие другие варианты исполнения.
Очень часто производители используют храповик в качестве элемента, через который проводится установка рабочих параметров. Примером можно назвать фиксацию шага реза в определенном диапазоне. Кроме этого, установка проводится при непосредственном изготовлении станочного оборудования.
В последнее время установка проводится в станках для круглой шлифовки, устройство обеспечивает радиальную подачу. Встречается механизм в домкратах и различных лебедочных системах, заводных автомобилях и других устройствах.
Разновидности механизма
В продаже встречаются самые различные фрикционные храповые механизмы. Они могут применяться для реализации самых различных задач. Среди особенностей проводимой классификации отметим следующие моменты:
- Профилированная поверхность часто изготавливается в виде барабана или рейки.
- Реечный вариант исполнения встречается крайне редко, так как функциональность устройства существенно снижается. Барабанные фрикционные храповые механизмы встречаются намного чаще по причине компактности и других свойств.
- Профиль основы также классифицируется по большому количеству признаков. Чаще всего встречаются радиальные, прямоугольные и пологе варианты исполнения. Радиальные получили широкое распространение, так как они компактные и просты в установке.
В большинстве случаев зуб имеет классическую форму, за счет чего обеспечивается надежность работы.
https://youtube.com/watch?v=GMDe6caao-Q
Коленно-рычажный механизм
Современный коленно-рычажный механизм применяется в тех случаях, когда на исполнительный орган следует передать большое усилие, но при этом движущая сила не должна быть большой. При этом часто в качестве привода применяется гидравлика, которая во многом определяет основные свойства конструкции. Достоинствами можно назвать нижеприведенные моменты:
- Высокая скорость перемещения при холостом ходе. За счет этого возникает возможность проводить установку устройства в случае, когда нужно обеспечить быстрый ход подвижного элемента. Примером можно назвать оборудование, предназначенное для фрезерования или точения, так как оно имеет большое количество подвижных узлов, которые должны периодически менять свое положение.
- Небольшие линейные размеры рабочего гидравлического цилиндра. Это свойство определяет возможность создания компактной конструкции. В последнее время больше всего цениться именно компактность, так как оборудование становится все легче и меньше. За счет этого упрощается установка и обслуживание.
- Низкий показатель количества рабочей жидкости в системе. За счет этого существенно снижаются расходы при обслуживании. Время от времени приходится проводить пополнение объема жидкости, так как работа конструкции приводит к его расходу.
 За счет этого возникает возможность проводить установку устройства в случае, когда нужно обеспечить быстрый ход подвижного элемента. Примером можно назвать оборудование, предназначенное для фрезерования или точения, так как оно имеет большое количество подвижных узлов, которые должны периодически менять свое положение.
За счет этого возникает возможность проводить установку устройства в случае, когда нужно обеспечить быстрый ход подвижного элемента. Примером можно назвать оборудование, предназначенное для фрезерования или точения, так как оно имеет большое количество подвижных узлов, которые должны периодически менять свое положение.Однако, у подобного варианта исполнения есть довольно большое количество недостатков, среди которых отметим:
- Довольно высокая стоимость привода и необходимость в периодическом обслуживании. Именно поэтому устройство устанавливается в том случае, когда нужно провести передачу большого усилия. При производстве рычажного механизма подобного типа применяются материалы с высокой устойчивостью к воздействию окружающей среды.
- Есть вероятность повреждения магистрали, что становится причиной вытекания рабочей жидкости и возникновения других проблем. Конструктивные особенности конструкции определяют то, что есть вероятность возникновения самых различных проблем, к примеру, проскок максимального положения.
 Именно поэтому устройство устанавливается в том случае, когда нужно провести передачу большого усилия. При производстве рычажного механизма подобного типа применяются материалы с высокой устойчивостью к воздействию окружающей среды.
Именно поэтому устройство устанавливается в том случае, когда нужно провести передачу большого усилия. При производстве рычажного механизма подобного типа применяются материалы с высокой устойчивостью к воздействию окружающей среды.Выделяют несколько разновидностей рассматриваемого устройства, все они характеризуются определенными эксплуатационными характеристиками.
Электронные системы поворота
Принцип работы
Принцип работы поворотного устройства очень прост и держится на двух деталях, одна из которых механическая, а другая электронная. Механическая часть поворотного устройства соответственно отвечает за поворот и наклон батареи. А электронная часть регулирует моменты времени и углы наклона, по которым действует механическая часть.
Электрооборудование, используемое вместе с солнечными батареями, заряжается от самих же батарей, что в некотором роде также экономит средства на подпитку электроники.
Положительные стороны
Если говорить о достоинствах электронного оборудования для поворотного устройства, то стоит отметить удобство. Удобство заключается в том, что электронная часть устройства будет в автоматическом режиме управлять процессом поворота батареи.
Данное преимущество не единственное, а является лишь еще одним в списке тех, что были перечислены ранее. То есть помимо экономии средств и повышения КПД, электроника освобождает человека от надобности вручную осуществлять поворот.
Как сделать своими руками
Создать трекер для солнечных батарей своими руками несложно, так как схема его создания проста. Для того чтобы создать работоспособную схему трекера своими руками необходимо иметь в наличии два фоторезистора. Кроме этих составляющих, нужно также приобрести моторное устройство, которое будет поворачивать батареи.
Подключение этого устройства осуществляется при помощи Н – моста. Этот метод подключения позволит преобразовывать ток силой до 500 мА с напряжением от 6 до 15 В. Схема сборки позволить не только понять, как работает трекер для солнечных батарей, но и создать его самому.
Чтобы настроить работу схемы, необходимо провести следующие действия:
- Удостовериться в наличия питания на схему.
- Провести подключение двигателя с постоянным током.
- Установить фотоэлементы нужно рядом, чтобы добиться одинакового количества солнечных лучей на них.
- Необходимо выкрутить два подстроечных резистора. Сделать это нужно против часовой стрелки.
- Запускается подача тока на схему. Должен включиться двигатель.
- Вкручиваем один из подстроечников до тех пор, пока он не упрется. Помечаем это положение.
- Продолжить вкручивание элемента до тех пор, пока двигатель не начнет крутиться в противоположную сторону. Помечаем и это положение.
- Делим полученное пространство на равные отделы и посередине устанавливаем подстроечник.
- Вкручиваем другой подстроечник до тех пор, пока двигатель не начнет немного дергаться.
- Возвращаем подстроечник немного назад и оставляем в таком положении.
- Для проверки правильности работы можно закрывать участки солнечной батареи и смотреть за реакцией схемы.

Возвратно-поступательный механизм своими руками
Существенно сэкономить можно путем создания возвратно-поступательного механизма своими руками. В некоторых случаях его делают из дрели, в других для передачи вращающего крутящего момента используется электрический двигатель.
Особенностями назовем нижеприведенные моменты:
- Большинство конструкций самостоятельно изготовить не получается, так как требуемые детали характеризуются высокой сложностью. Примером можно назвать сочетание кривошипного вала и шестерни.
- Во всех случаях должны проводится расчеты, так как в противном случае обеспечить требуемые параметры не получается.
- Изготовить конструкцию рассматриваемого типа можно только при наличии специального оборудования. Если устройство сделано своими силами, то его реальные параметры от расчетных могут существенно отличаться.
 Если устройство сделано своими силами, то его реальные параметры от расчетных могут существенно отличаться.
Если устройство сделано своими силами, то его реальные параметры от расчетных могут существенно отличаться.В целом можно сказать, что рассматриваемая задача довольно сложна в исполнении. Именно поэтому работу должны проводить исключительно профессионалы, которые могут провести сложные расчеты, а также изготовить требуемые детали.
Достоинства кулачковых механизмов
Основным преимуществом устройства считается его способность реализовать весьма сложные пространственные траектории движения толкателя. Кроме того, движение можно строго регулировать по временным фазам, зависящим от угла поворота ведущего вала. При этом конструкция его весьма проста в работе и обслуживании.
Еще одним важным преимуществом конструкции над, скажем, электронными системами управления с электрическим или гидравлическим приводом, является ее исключительная надежность
Это очень важно в тех конструкциях, где требуется достичь точного многократного повторения одних и тех же движений, таких, как двигатель или швейная машинка
Возвратно-поступательный механизм собственными руками
Значительно сэкономить можно путем создания возвратно-поступательного механизма собственными руками.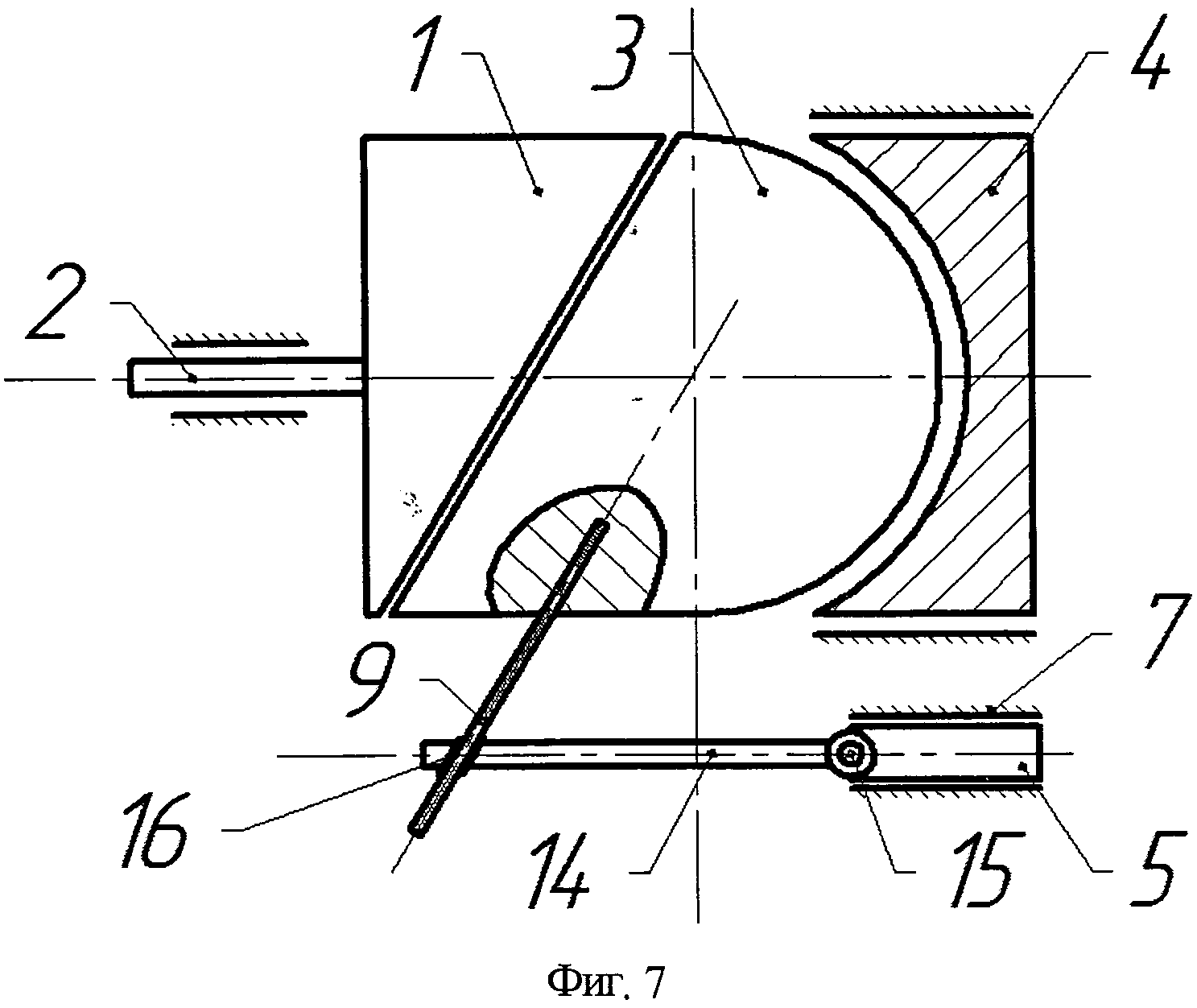 В большинстве случаев его производят из дрели, в прочих для передачи вращающего крутящего момента применяется электро двигатель.
В большинстве случаев его производят из дрели, в прочих для передачи вращающего крутящего момента применяется электро двигатель.
Характерностями назовем приведенные ниже моменты:
- Большинство конструкций собственными силами сделать не выходит, так как требуемые детали отличаются высокой сложностью. Примером можно назвать комбинирование кривошипного вала и шестерни.
- В любых ситуациях должны делаются расчёты, так как в другом случае обеспечить требуемые параметры не выходит.
- Сделать конструкцию рассматриваемого типа возможно лишь при наличии особенного оборудования. Если устройство сделано самостоятельно, то его настоящие параметры от расчетных могут значительно различаться.
В общем необходимо заявить, что рассматриваемая задача довольно трудна в применении. Собственно поэтому работу должны проводить исключительно профессионалы, которые могут провести непростые расчеты, а еще сделать требуемые детали.
Как рассчитать простой рычажный механизм самостоятельно?
Перед непосредственным созданием механизма следует провести расчеты основных показателей, а также построить схему распределения нагрузок. Силовой расчет рычажного механизма проводится после определения исходных данных:
Силовой расчет рычажного механизма проводится после определения исходных данных:
- Создается кинематическая схема массы и моментов, инерции звеньев и положения центров массы.
- Учитывается закон движения механизма.
- Определяется внешнее силовое нагружение.
- Рассчитывается угол перекрытия рычажном механизме.
Проводимый кинематический и силовой предусматривает создание системы координат, которая используется для расчета кинематических характеристик. Кулисно-рычажный вариант исполнения проектируется при создании системы координат и обозначением всех сил. Для проектирования требуется большое количество различных формул, при этом в конце следует выполнить проверку.
Как правило, рассматриваемая работа выполняется инженерами, который учитывают ГОСТ проектирование. Это связано с тем, что структурная формула плоских рычагов выбирается в зависимости от области их применения.
Описание изобретения к патенту
Изобретение относится к группе механизмов, в которых связь механических звеньев осуществляется прохождением магнитного потока при отсутствии между ними контакта.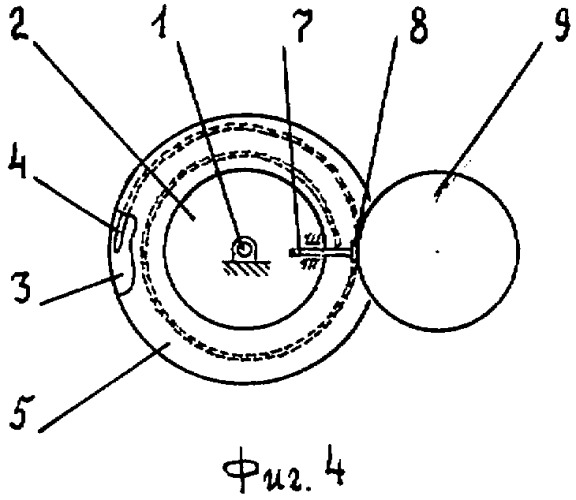
Известен механизм, содержащий поворотный на оси барабан и магнитный элемент .
Задачей изобретения является придание известному механизму функций преобразования возвратно-поступательного движения в возвратно-вращательное движение и наоборот.
Технический результат достигается тем, что в механизме преобразования возвратно-поступательного движения в возвратно-вращательное движение и наоборот, содержащем поворотный на оси барабан и магнитный элемент, на поверхности барабана выполнен закрытый винтовой канал с заключенным в нем, по меньшей мере, одним шариком, а магнитный элемент установлен на рейке с возможностью перемещения вдоль барабана; причем шарик и магнитный элемент имеют магнитную связь. Магнитный элемент уравновешен баллоном, содержащим газ легче воздуха.
На фиг.1 представлен в горизонтальном положении механизм преобразования возвратно-поступательного движения в возвратно-вращательное движение и наоборот, вид сбоку; на фиг.2 изображено сечение фиг.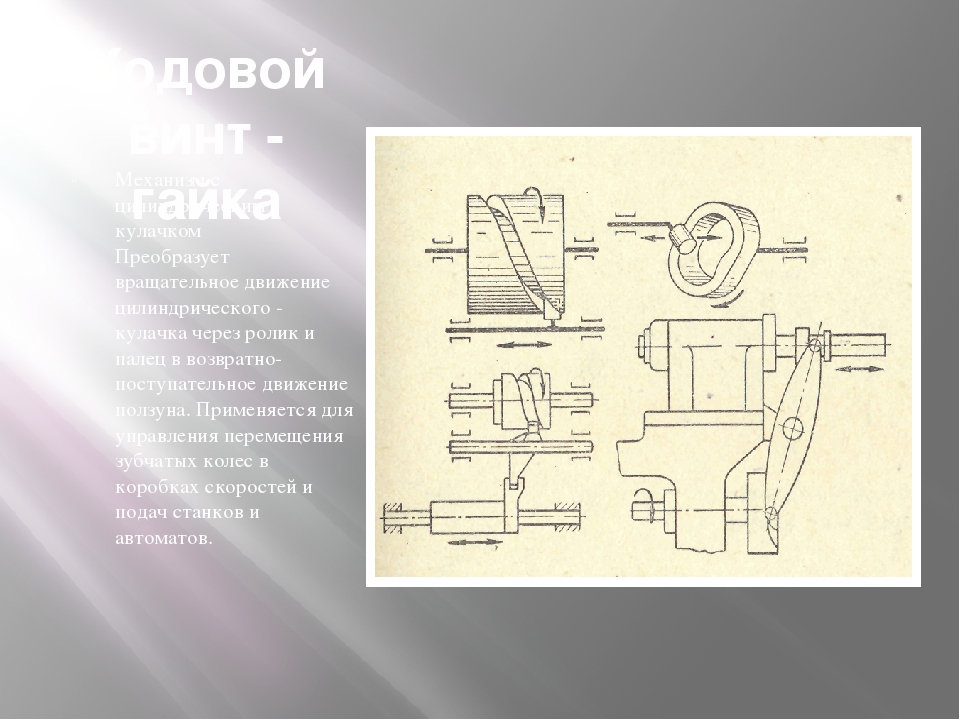 1 по А-А; на фиг.3 механизм преобразования возвратно-поступательного в возвратно-вращательное движение и наоборот показан в вертикальном положении, вид сбоку; на фиг.4 изображен вид на фиг.3 сверху.
1 по А-А; на фиг.3 механизм преобразования возвратно-поступательного в возвратно-вращательное движение и наоборот показан в вертикальном положении, вид сбоку; на фиг.4 изображен вид на фиг.3 сверху.
Механизм преобразования возвратно-поступательного движения в возвратно-вращательное движение и наоборот содержит поворотный на оси 1 барабан 2, на поверхности 3 которого выполнен винтовой канал 4, закрытый жесткой тонкостенной оболочкой 5. Барабан может быть пустотелым или полнотелым, располагаться горизонтально или вертикально, иметь форму цилиндра или усеченного конуса. Канал в поперечном сечении может иметь форму полукруга, квадрата, прямоугольника, треугольника. В канале с возможностью свободного качения размещены несколько шариков 6, изготовленных из ферромагнитного материала, например, в виде железной дроби. У боковой поверхности барабана подвижно установлена рейка 7 с закрепленным на ней постоянным магнитным элементом 8, имеющим возможность перемещения вдоль барабана. Барабан, оболочка и рейка изготовлены из немагнитного материала. Шарики (дробь) и магнитный элемент имеют магнитную связь. В случае вертикального расположения барабана магнитный элемент может быть уравновешен баллоном 9, например, в форме тонкостенного жесткого шара, содержащим газ (водород гелий) легче воздуха. Шар может быть прикреплен к магнитному элементу или рейке.
Барабан, оболочка и рейка изготовлены из немагнитного материала. Шарики (дробь) и магнитный элемент имеют магнитную связь. В случае вертикального расположения барабана магнитный элемент может быть уравновешен баллоном 9, например, в форме тонкостенного жесткого шара, содержащим газ (водород гелий) легче воздуха. Шар может быть прикреплен к магнитному элементу или рейке.
При повороте оси 1 шарики 6 начинают перекатываться по винтовому каналу 4, выполненному на поверхности 3 барабана 2; заставляя вследствие воздействия постоянного магнитного поля перемещаться магнитный элемент 8 и рейку 7 в направлении движения шариков. Тонкостенная оболочка 5, плотно охватывающая поверхность барабана, препятствует выпадению шариков из канала. Таким образом, в предложенном механизме происходит преобразование возвратно-вращательного движения барабана в возвратно-поступательное движение рейки.
При перемещении рейки с магнитным элементом вдоль барабана постоянное магнитное поле, воздействуя на шарики, находящиеся в винтовом канале, заставляют их перемещаться в направлении движения магнитного элемента и поворачивать барабан.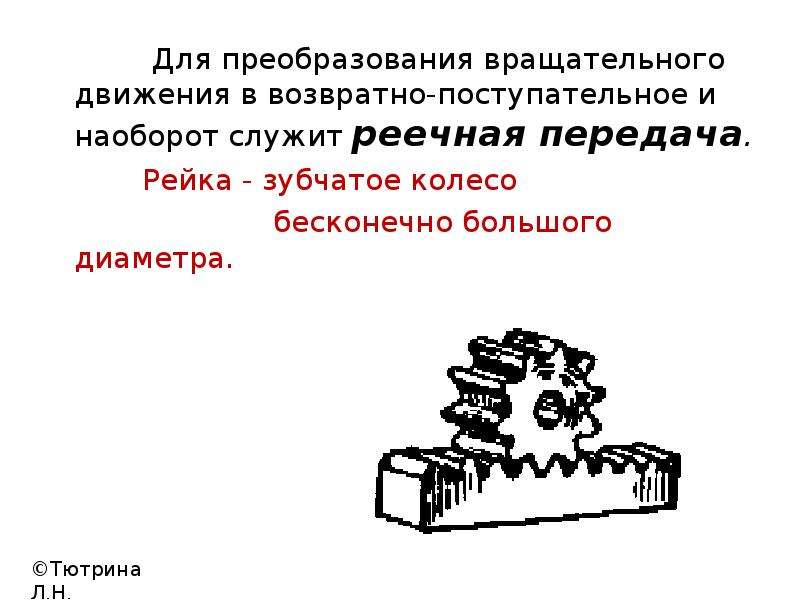 Таким образом, происходит преобразование возвратно-поступательного движения рейки в возвратно-вращательное движение барабана.
Таким образом, происходит преобразование возвратно-поступательного движения рейки в возвратно-вращательное движение барабана.
При вертикальном расположении механизма преобразования возвратно-поступательного движения в возвратно-вращательное движение и наоборот баллон 9, заполненный газом легче воздуха, уравновешивает силу тяжести от масс магнитного элемента и рейки.
Предложенный механизм может быть применен в учебном процессе, техническом творчестве, в изготовлении приборов и игрушек.
Источники информации
1. Политехнический словарь. Гл. ред. И.И.Артоболевский. – М.: Советская Энциклопедия, 1976. – С.268-269.
Недостатки кулачковых механизмов
Самым заметным минусом служит сложность и высокая себестоимость производства деталей механизма. Наиболее трудоемким является изготовление управляющего профиля. Технологический процесс начинается с отливки заготовки из высокопрочных стальных сплавов, обладающих особой устойчивостью к переменным механическим напряжениям, истиранию и перепадам температуры.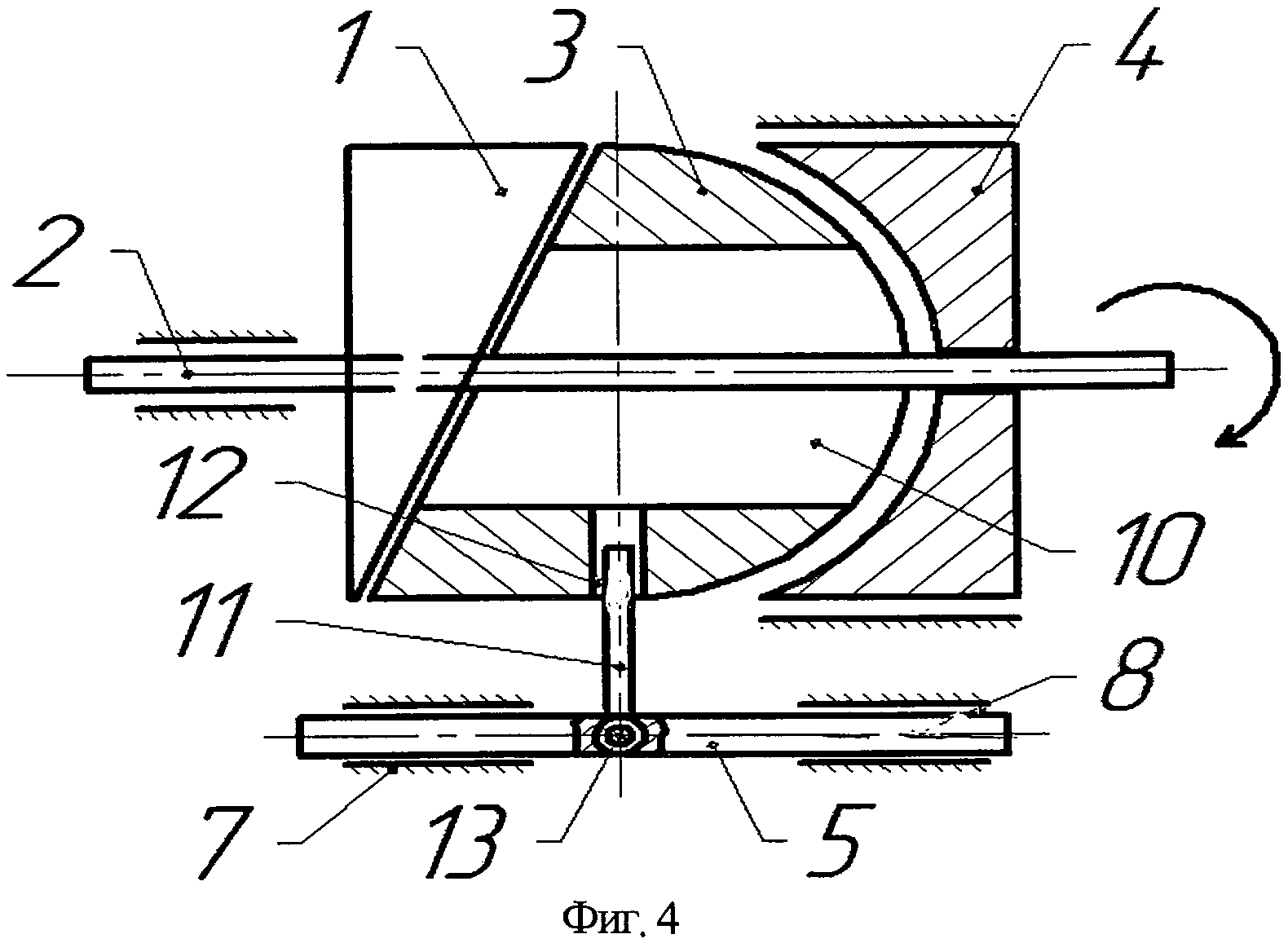 Далее требуется провести высокоточную механическую обработку с последующей шлифовкой и полировкой поверхностей. Упрочнение рабочей поверхности достигается термообработкой и цементацией. Такие распредвалы или кулачки привода масляного насоса обходятся дорого, но зато смогут отработать сотни тысяч километров пробега.
Далее требуется провести высокоточную механическую обработку с последующей шлифовкой и полировкой поверхностей. Упрочнение рабочей поверхности достигается термообработкой и цементацией. Такие распредвалы или кулачки привода масляного насоса обходятся дорого, но зато смогут отработать сотни тысяч километров пробега.
Еще одним минусом считается небольшая нагрузка, которую может толкнуть толкатель. Это происходит из-за большого трения в сопряжении пары, кроме того, возникают значительные боковые нагрузки на шток. Этот недостаток ограничивает мощностные возможности исполнительного органа устройства.
Для борьбы с этим недостатком используют роликовый толкатель, размещенный на шариковом или игольчатом подшипнике. Для крупных двигателей с большим диаметром клапанов и мощными возвратными пружинам используют коромысленную схему. Разная длина плеч коромысла работают как рычажная система, трансформируя больший ход на одном плече в большее усилие на другом.
Функциональное предназначение и устройство
Вид профиля впадины винт-гайка: а) арочный контур б) радиусный контур
Цель рассматриваемого механизма состоит в том, чтобы преобразовать вращательное движение привода в прямолинейное перемещение рабочего объекта. Передача состоит из двух составных частей: ходового винта и гайки.
Передача состоит из двух составных частей: ходового винта и гайки.
Винт изготавливается из высокопрочных сталей марок 8ХФ, 8ХФВД, ХВГ, подвергнутых индукционной закалке, или 20Х3МВФ с азотированием. Резьба выполнена в форме спиральной канавки полукруглого или треугольного сечения. В зависимости от условий работы винта профиль впадины может иметь несколько исполнений. Наиболее часто применяется арочный или радиусный контур.
Охватывающая деталь — гайка является составным узлом. Она имеет сложное устройство. Обычно представляет собой корпус, в котором расположены два вкладыша с такими же канавками, как и у ходового винта. Материал вкладных деталей: объемно закаливаемая сталь марки ХВГ, цементируемые стали 12ХН3А, 12Х2Н4А, 18ХГТ. Вставки устанавливают таким образом, чтобы после сборки обеспечить предварительный натяг в системе винт-гайка.
Внутри винтовых канавок размещаются закаленные стальные шарики, изготовленные из стали ШХ15, которые при работе передачи циркулируют по замкнутой траектории. Для этого внутри корпуса гайки имеются несколько обводных каналов, выполненных в виде трубок, соединяющих витки гайки. Длина их может быть различной, то есть шарики могут возвращаться через один, два витка, или в конце гайки. Наиболее распространенным является возврат на смежный виток (система DIN).
Для этого внутри корпуса гайки имеются несколько обводных каналов, выполненных в виде трубок, соединяющих витки гайки. Длина их может быть различной, то есть шарики могут возвращаться через один, два витка, или в конце гайки. Наиболее распространенным является возврат на смежный виток (система DIN).
Статическое уравновешивание кривошипно-ползунного механизма
Во время перемещения звеньев механизма с изменяющимися скоростями (ускоренного движения) в них возникают инерционные силы и моменты. Их называют динамическими нагрузками. Такие нагрузки приводят к появлению вибраций, колеблющиеся детали излучают свои колебания в воздух, вызывая воздушный шум.
Динамические нагрузки приводят также к многократным деформациям деталей, их повышенному износу, накоплению усталости материала и преждевременному разрушению.
Шум и вибрация оказывают также негативное влияние на людей и точные механизмы, находящиеся рядом с источником. И, наконец, на возбуждение колебаний и излучение шума тратится энергия, это снижает КПД кривошипно-ползунного механизма.
Причины возникновения вибрации делятся на:
- силовые, колебания возмущаются периодическим приложением сил к объекту;
- кинематические, возмущение возникает за счет движения деталей;
- параметрические, возбуждение происходит за счет сил и моментов инерции.
Виброактивность делится на
- Внутреннюю, возникающую и распространяющуюся в пределах физических границ кривошипно-ползунного механизма. Она действует только на его детали и мало распространяется вовне.
- Внешнюю. Она действует на опоры механизма, его связи с другими частями общей конструкции, трансмиссию и далее. Основная причина, вызывающая такую виброактивность — неуравновешенность рычагов и звеньев.
Для устранения причин возникновения вибрации проводят статическое уравновешивание кривошипно-ползунного механизма. Механизм должен находиться в равновесии в состоянии покоя, при этом силы трения полагаются нулевыми.
Для этого вычисляют массы всех звеньев и строят график сил, действующих на них в состоянии покоя, прежде всего сил тяжести. Массы звеньев должны быть уравновешены с учетом длины рычагов (расстояния от центра вращения).
Массы звеньев должны быть уравновешены с учетом длины рычагов (расстояния от центра вращения).
В ходе статического уравновешивания массы звеньев полагаются сосредоточенными в геометрическом центре звена.
Если общий центр масс системы совершает ускоренное движение, механизм считают неуравновешенным. Цель процедуры — достижение нулевого значения ускорения центра масс. Для этого к движущимся частям добавляют уравновешивающие массы, сводящие ускорение к нулю.
После статического уравновешивания наступает этап динамического уравновешивания кривошипно-ползунного механизма. При этом расчеты ведутся уже с учетом реальной пространственной конфигурации деталей.
В ходе производства реального изделия из-за дефектов материала, погрешностей отливки, механообработки и сборки возникают дополнительные разбалансировки звеньев.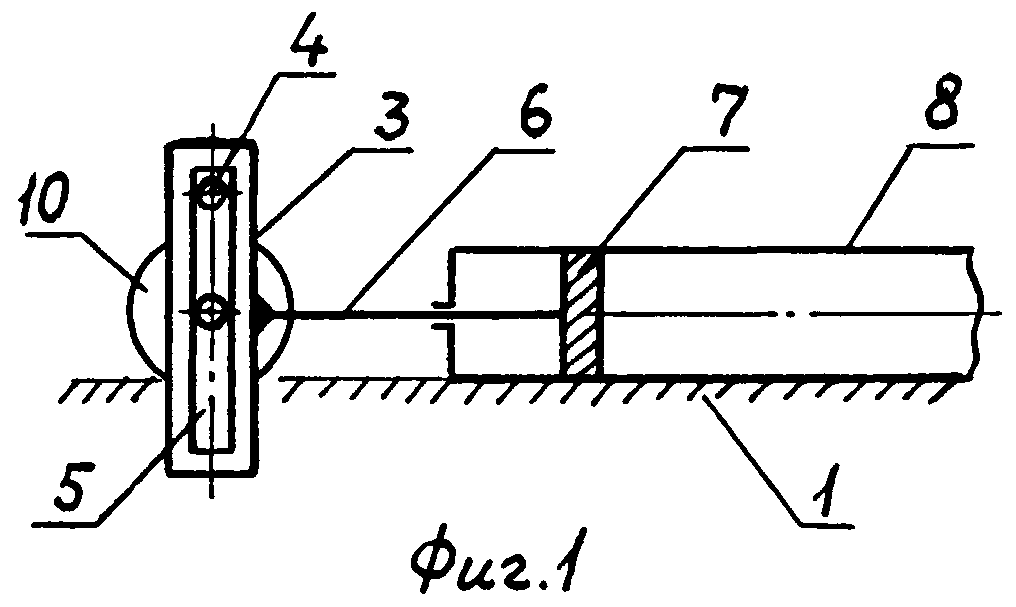 Для их устранения применяется балансировка кривошипно-ползунного механизма. Она заключается в:
Для их устранения применяется балансировка кривошипно-ползунного механизма. Она заключается в:
- определении места дисбаланса с помощью средств вибродиагностики;
- передвижения и закрепления балансировочных грузов, предусмотренных конструкцией изделия;
- высверливание, выборка или наплавка необходимых масс материала в рассчитанных местах;
- повторной вибродиагностике.
Цикл операций повторяется до тех пор, пока подвижные части не будут удовлетворительно уравновешены.
Часовой механизм поворота
Устройство часового механизма поворота в основе своей довольное простое. Для того чтобы создать такой принцип работы, нужно взять любые механические часы и соединить их с двигателем солнечной батареи.
Для того чтобы заставить работать двигатель, необходимо установить один подвижный контакт на длинную стрелку механических часов. Второй неподвижный закрепляется на двенадцати часах. Таким образом, каждый час, когда длинная стрелка будет проходить через двенадцать часов, контакты будут замыкаться, и двигатель будет поворачивать панель.
Временной промежуток в один час, выбран исходя из того, что за это время солнечное светило проходит по небу около 15 градусов. Установить еще один неподвижный контакт можно на шесть часов. Таким образом, поворот будет проходить каждые полчаса.
возвратно-поступательное движение — это… Что такое возвратно-поступательное движение?
- возвратно-поступательное движение
- alternate/reciprocal motion
Большой англо-русский и русско-английский словарь.
2001.
- возвратно-вращательное движение
- возвратно-поступательное скольжение
Смотреть что такое «возвратно-поступательное движение» в других словарях:
возвратно-поступательное движение — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.
] Тематики энергетика в целом EN alternating motionreciprocating motionreciprocal movement … Справочник технического переводчикавозвратно-поступательное движение — grįžtamasis slenkamasis judesys statusas T sritis automatika atitikmenys: angl. reciprocating motion vok. hinundhergehende Bewegung, f; Pendelbewegung, f rus. возвратно поступательное движение, n pranc. mouvement alternatif, m; mouvement de va et … Automatikos terminų žodynas
возвратно поступательное движение — grįžtamasis slenkamasis judėjimas statusas T sritis fizika atitikmenys: angl. back and forth motion; reciprocating motion vok. hin und hergehende Bewegung, f; umkehrbare Translationsbewegung, f rus. возвратно поступательное движение, n pranc.… … Fizikos terminų žodynas
возвратно-поступательное движение бурового снаряда при долблении — — [http://slovarionline.ru/anglo russkiy slovar neftegazovoy promyishlennosti/] Тематики нефтегазовая промышленность EN churning motion … Справочник технического переводчика
возвратно-поступательное движение инструмента на забое — — [http://slovarionline.
ru/anglo russkiy slovar neftegazovoy promyishlennosti/] Тематики нефтегазовая промышленность EN spudding action … Справочник технического переводчикадвижение — я, с. 1) Состояние, противоположное неподвижности. Законы движения. Способность к движению у живых существ и растений. Движение происходит в пространстве и времени (Свидерский). Антонимы: неподви/жность, поко/й 2) (чего или какое) Перемещение в… … Популярный словарь русского языка
электропривод возвратно-поступательного [вибрационного] движения — Электропривод, обеспечивающий возвратно поступательное [вибрационное] движение исполнительного органа рабочей машины. [ГОСТ Р 50369 92] Тематики электропривод … Справочник технического переводчика
электропривод возвратно-поступательного — 12 электропривод возвратно поступательного [вибрационного] движения: Электропривод, обеспечивающий возвратно поступательное [вибрационное] движение исполнительного органа рабочей машины Источник: ГОСТ Р 50369 92: Электроприводы.
Термины и… … Словарь-справочник терминов нормативно-технической документацииУдар головой (движение) — У этого термина существуют и другие значения, см. Удар головой. Удар головой импульсное возвратно поступательное (редко вращательное), с прямолинейной или криволинейной траектории, направленное движение головой. Цель движения … … Википедия
Reciprocation — Возвратно поступательное движение; Осевое смещение (цилиндров красочного аппарата) … Краткий толковый словарь по полиграфии
Зубообрабатывающий станок — металлорежущий станок для обработки зубчатых колёс, червяков и зубчатых реек. В зависимости от применяемого инструмента (см. Зуборезный инструмент) различают зубофрезерные, зубодолбёжные, зубострогальные, зубоотделочные… … Большая советская энциклопедия
 ] Тематики энергетика в целом EN alternating motionreciprocating motionreciprocal movement … Справочник технического переводчика
] Тематики энергетика в целом EN alternating motionreciprocating motionreciprocal movement … Справочник технического переводчика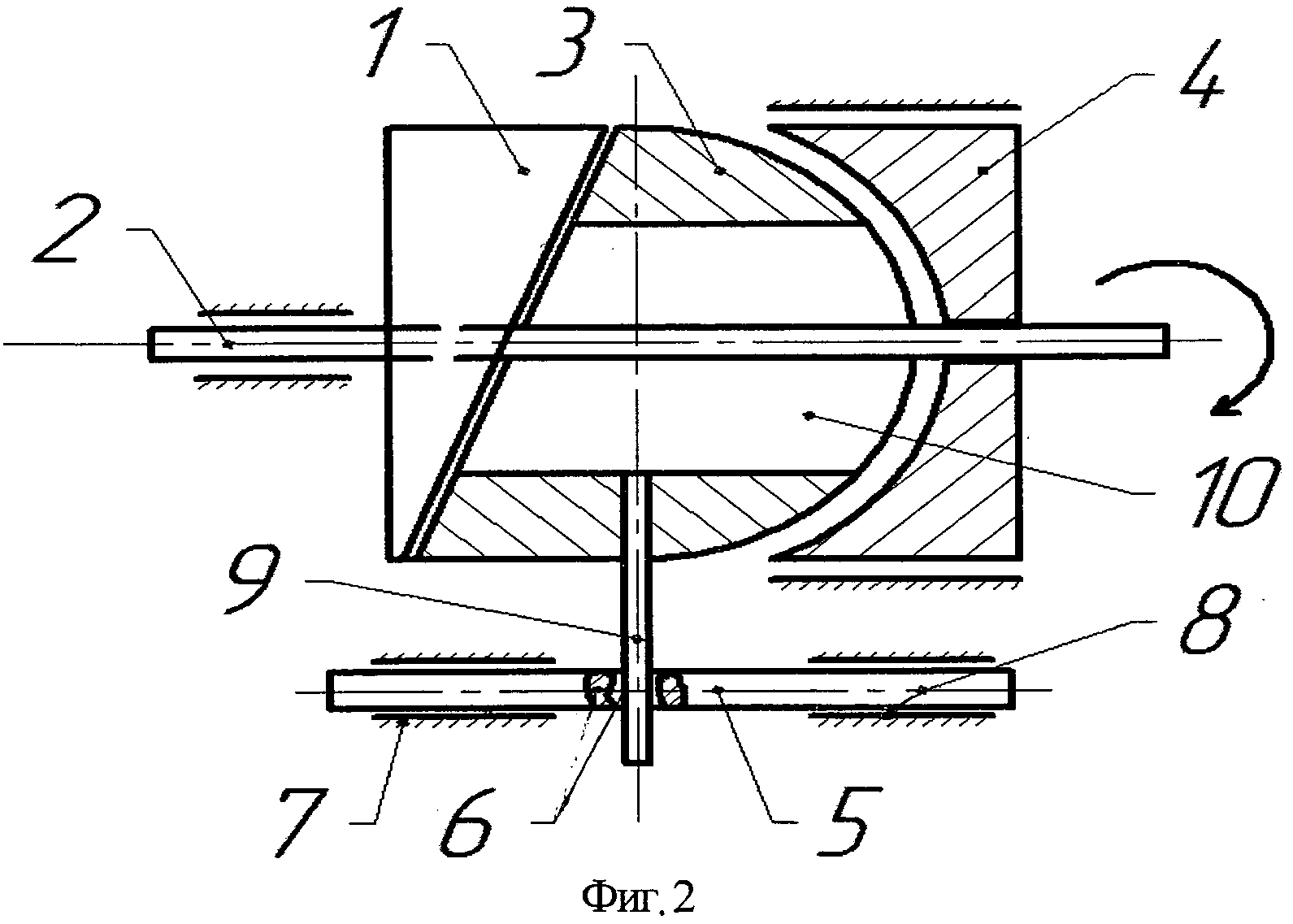 ru/anglo russkiy slovar neftegazovoy promyishlennosti/] Тематики нефтегазовая промышленность EN spudding action … Справочник технического переводчика
ru/anglo russkiy slovar neftegazovoy promyishlennosti/] Тематики нефтегазовая промышленность EN spudding action … Справочник технического переводчика Термины и… … Словарь-справочник терминов нормативно-технической документации
Термины и… … Словарь-справочник терминов нормативно-технической документацииКниги
- Проводы. Хроника одной ночи, Ардов Михаил Викторович. Сорок пять лет машинопись «Проводов» пролежала у писателя в столе, прежде чем он решился на их публикацию. Появись этот роман в свое время, сразу же после написания, в самиздате или… Подробнее Купить за 499 руб
- Проводы Хроника одной ночи, Ардов М.. Сорок пять лет машинопись «Проводов» пролежала у писателя в столе, прежде чем он решился на их публикацию. Появись этот роман в свое время, сразу же после написания, в самиздате или… Подробнее Купить за 429 руб
- Проводы. Хроника одной ночи, Михаил Ардов. Сорок пять лет машинопись «Проводов» пролежала у писателя в столе, прежде чем он решился на их публикацию. Появись этот роман в свое время, сразу же после написания, всамиздате или тамиздате,… Подробнее Купить за 295 руб
 Сорок пять лет машинопись «Проводов» пролежала у писателя в столе, прежде чем он решился на их публикацию. Появись этот роман в свое время, сразу же после написания, в самиздате или… Подробнее Купить за 499 руб
Сорок пять лет машинопись «Проводов» пролежала у писателя в столе, прежде чем он решился на их публикацию. Появись этот роман в свое время, сразу же после написания, в самиздате или… Подробнее Купить за 499 рубУход за зубами в стоматологической клинике GMS Dental
Средств гигиены полости рта много, но не все они одинаково важны. Какие нужны для сохранения здоровья, а какие нам навязали маркетологи? Попробуем разобраться в этом вместе со стоматологами.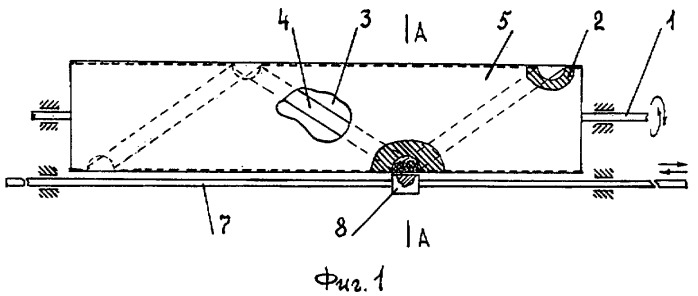
Как выбрать зубную щетку?
Специалисты советуют искусственную щетину — на ней бактериям менее уютно — и маленькую головку на 2−2,5 зуба: она лучше проникает в труднодоступные уголки. Если нет иных указаний от врача, щетку лучше брать средней жесткости. Длина и наклон щетинок или подвижная головка щетки не важны. У некоторых щеток на тыльной стороне есть силиконовые крылышки для устранения налета с языка. Если язык после них не становится розовым, это говорит о проблемах с ЖКТ.
«У меня нет жестких требований к параметрам моей ручной зубной щетки, она просто должна быть удобной и меняться раз в полгода, — рассказывает стоматолог-терапевт GMS Dental Дмитрий Рябов. — Конечно, должно быть много щетинок на щетке. Она должна быть достаточно мягкой, чтобы не повредить десны, но и достаточно жесткой, чтобы снять зубной налет. В большинстве случаев без налета нет кариеса. Но даже с идеальной щеткой успех гарантирует только правильная и старательная чистка зубов».

Это значит не менее двух минут совершать возвратно-поступательные движения в вертикальном направлении с внутренней и внешней стороны зубных рядов. Обязательно обрабатывать жевательные поверхности, но не стоит слишком сильно давить на щетку: можно травмировать эмаль и поранить десны.
Помимо ручной популярны также электрические зубные щетки, щетинки которых вращаются автоматически. Они эффективно удаляют зубной налет и часто рекомендуются детям. Хорошо зарекомендовали себя звуковые щетки, которые подходят практически всем и очень удобны в эксплуатации. А вот очень популярные раньше ультразвуковые щетки сейчас применяются реже, поскольку противопоказаны людям с имплантами и ортопедическими конструкциями, которые разгерметизируются от ультразвука.
В последнее время становятся популярны ионные зубные щетки. Помимо механической очистки они устраняют вредные микроорганизмы с положительно заряженного зубного налета с помощью электростатического притяжения к щетинкам. Их преимущества сложно оценить из-за малого времени использования с момента появления на рынке.
Их преимущества сложно оценить из-за малого времени использования с момента появления на рынке.
Нужно ли выбирать зубную пасту
Стоматологи рекомендуют чистить зубы 2 раза в день, но делать это всегда после завтрака, а не до. Марка же зубной пасты самый маловажный аспект в уходе за зубами. «Волшебной» зубной пасты нет — ни одна из них не гарантирует сама по себе защиты от кариеса, и все они примерно одинаковы по составу. И необходимо ориентироваться на индивидуальные особенности зубов. Людям с индивидуальной повышенной чувствительностью зубов нужно аккуратно использовать отбеливающие зубные пасты, т. к. злоупотребление ими приводит к клиновидным дефектам — щелям, возникающим у основания передних зубов на их внешней поверхности.
Основное назначение пасты — растворение зубного налета и полировка эмали. Пасты могут выполнять дополнительные функции: лечение кровоточащих десен, снижение чувствительности зубов, повышение минерализации эмали, фторирование. Если текущих проблем во рту нет, Дмитрий Рябов советует применять и использует сам универсальные пасты, сочетающие все эти факторы.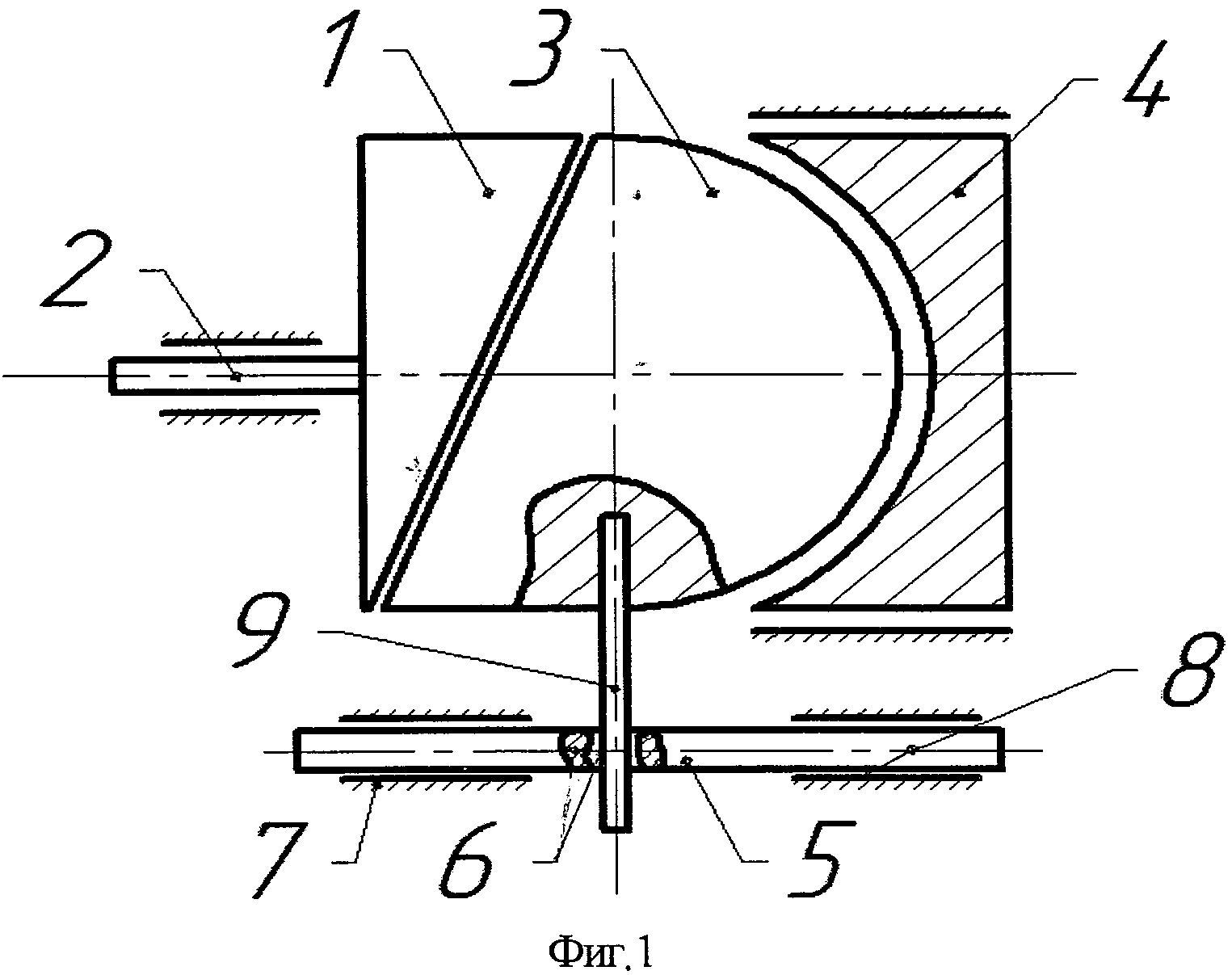
Сильные лечебные пасты, например содержащие хлоргексидин, нельзя использовать более 2−3 недель подряд. Иначе нарушается микрофлора ротовой полости. Также нельзя на постоянной основе применять отбеливающие пасты.
Такие зубные пасты отличаются или повышенной абразивностью, или содержат сильнодействующие ферменты, так что если пользоваться ими долгое время, можно просто стереть эмаль. По этой же причине стоматологи против использования зубного порошка. До сих пор находятся люди, которые отбеливали зубы смесью соды и лимонного сока. Помимо нередких ожогов десен новообладателям белоснежных улыбок доставались истонченные эмали, клиновидные дефекты, гиперчувствительность зубов и в конце концов новые пломбы.
«Лично я выбираю зубные пасты, у которых мне нравится вкус, цвет, консистенция, — делится опытом детский стоматолог GMS Dental Анаит Гришкян. — У меня в арсенале 4−5 паст с различными активными компонентами. Время от времени я их меняю, чтобы не возникло привыкания.
 А вот детям подходит не любая зубная паста. Аспекты вкуса и цвета для них еще важнее. У ребенка не должно возникнуть соблазна проглотить пасту и не должно быть последствий в случае, если это все же произойдет».
А вот детям подходит не любая зубная паста. Аспекты вкуса и цвета для них еще важнее. У ребенка не должно возникнуть соблазна проглотить пасту и не должно быть последствий в случае, если это все же произойдет».Как применяют зубные нити
Паста и щетка обрабатывают только внутреннюю и внешнюю поверхности зубов. Между тем частички пищи застревают и в таких промежутках между зубами, куда ворсинки щетки не проникают. Чтобы вручную очистить узкие щели используются ершики и зубные нити. Ершики — выпрямленные мини-варианты зубной щетки — незаменимы при обработке ортопедических протезов. Зубные нити для личной гигиены стоматологи применяют чаще, хотя ими и приходится орудовать двумя руками.
Необходимо регулярно использовать зубную нить после еды, чаще всего днем. Можно применять разные виды нитей: с круглым сечением и плоским, флоссы, суперфлоссы, нити из разнообразных синтетических материалов, с различными ароматами или с фтор-покрытием. Движение при чистке делаются только вдоль оси зуба.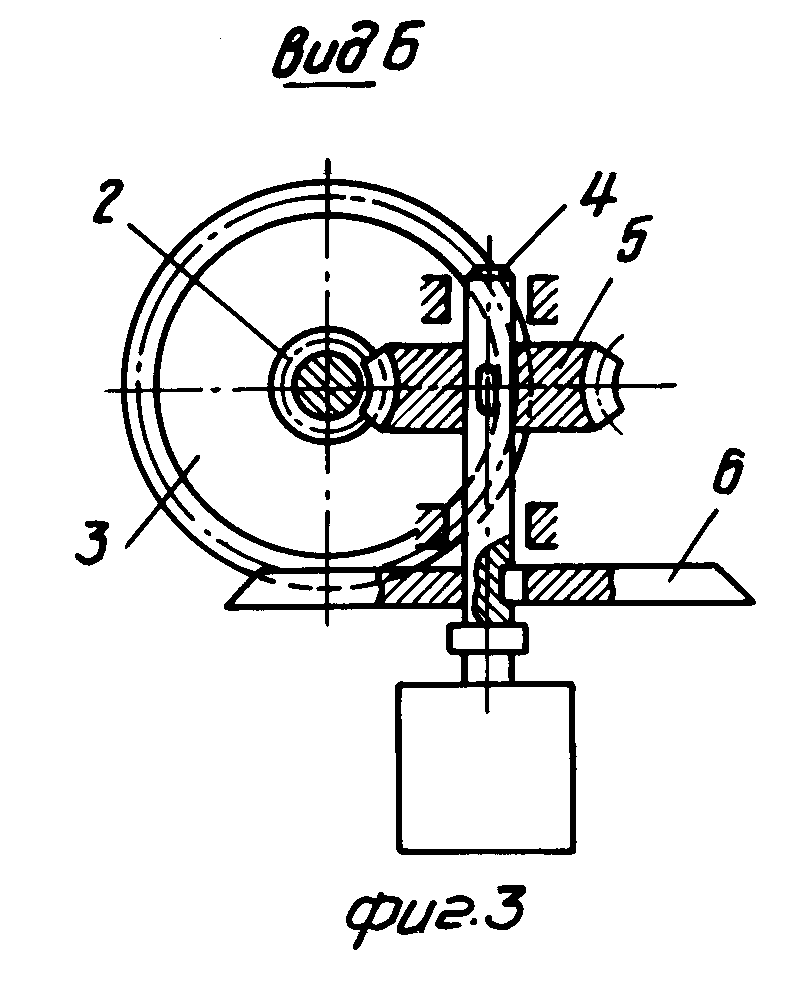
Чаще всего применение нити комбинируют с обычной чисткой зубов, а вот что должно быть раньше является таким же вековым спором стоматологов, как и «что было раньше — курица или яйцо? «
Анаит Гришкян считает, что если нет нарушенного прикуса и скученности зубов, то можно обойтись без зубной нити, и сама применяет ее редко. А вот Дмитрий Рябов использует тонкую зубную нить круглого сечения, только если язык ощущает застрявшие остатки пищи в промежутках между зубами.
В штате крупных клиник обычно есть стоматолог-гигиенист. Это не врачебная специальность, а должность, относящаяся к среднему медперсоналу. В задачу гигиениста как раз входит индивидуальный подбор средств гигиены и профилактики в случаях рта с особенностями. Верный выбор ершика или нити существенно зависит от характера промежутков между зубами.
Кому поможет ирригатор, а кому ополаскиватель
Ирригатор — это аппарат, подающий в ротовую полость тонкую струю воды или лечебного раствора под давлением. Прибор лучше всего использовать не сам по себе, а во время полномасштабной чистки зубов, прежде чем браться за зубную щетку. Он хорошо очищает полость рта от остатков пищи, может распылять жидкость, подавать ее порциями, к тому же всегда имеет специальный режим для массажа десен.
Прибор лучше всего использовать не сам по себе, а во время полномасштабной чистки зубов, прежде чем браться за зубную щетку. Он хорошо очищает полость рта от остатков пищи, может распылять жидкость, подавать ее порциями, к тому же всегда имеет специальный режим для массажа десен.
Ирригатор незаменим для пациентов с пародонтитом, он подходит людям с явно выраженными промежутками между зубами. Кроме того водой под напором очень удобно очищать ортопедические и ортодонтические конструкции.
Ополаскиватели можно использовать для освежения дыхания, выбирая обычно настойки на травах — спиртосодержащие жидкости слишком сушат слизистую рта. Но если нет стоматита, поражения десен или воспаления после хирургической операции, врачи относятся к ополаскивателям не слишком серьезно. А вот использование жвачки для устранения остатков пищи врачи приветствуют. Но строго после еды и не более 10 минут.
Маркетологи ежегодно придумывают новые средства ухода за полостью рта. Но если у вас свои зубы без выраженных дефектов, то 90% успеха в сохранении их здоровья — это новая зубная щетка плюс добросовестность и регулярность при чистке зубов.
Как же детям ухаживать за зубами?
Часто дети не понимают важность чистки зубов и воспринимают это как неприятную обязанность. Рассказываем, почему это необходимо и что делать, чтобы ребенок со временем чистил зубы сам и с удовольствием.
Доверить малышу самостоятельную чистку зубов можно только к шести-семи годам, когда дозревает мышечная и нервная система, чтобы ребенок мог самостоятельно держать щетку и правильно вычищать зубы. К этому возрасту малыш должен понимать важность процесса, привыкнуть к ежедневному ритуалу чистки и не воспринимать его негативно. Вот, как этого достичь.
Зачем нужен уход за молочными зубами?
У молочных зубов тонкая эмаль и если начинается кариес, то он очень быстро разрушает зуб, который приходится потом удалять. Но молочные зубы выполняют сразу несколько важных функций.
🔹Жевательная функция.
Если молочные зубы разрушаются, болят или их приходится удалять раньше времени, то ребенок не может полноценно пережевывать пищу, она плохо переваривается и усваивается. Это может сказаться на здоровье ребенка.
Это может сказаться на здоровье ребенка.
🔹Развитие зубо-челюстного аппарата.
Преждевременное удаление зубов приводит к нарушению развития челюсти и правильного прикуса.
🔹Эстетическая функция.
Красивая и здоровая ухоженная улыбка, много значит даже для детей. Они могут комплексовать и чувствовать себя в коллективе не комфортно из-за насмешек. Дети 3−6 лет совершенно непосредственны, могут смеяться и обижать ребенка, у которого черные зубы.
Поэтому ребенку можно уже с года рассказывать, что чистить зубы надо, чтобы не болели, могли пережевывать любую еду и оставались белыми и красивыми. Со временем, ребенок это запомнит и поймет. Большинство негативных эмоций, связанных с зубами, у детей возникает из-за лечения кариеса.
Кариес в раннем возрасте может появиться по разным причинам: врожденные дефекты эмали, передача инфекции от родителей, недостаток микроэлементов, например фтора или кальция.
«Чтобы снизить риск возникновения кариеса, нужно регулярно и правильно чистить зубы, ограничить употребление сладкого, — рассказывает стоматолог GMS Dental Дмитрий Рябов.
 -У маленьких детей, по возможности, убрать ночные кормления, особенно соки и компоты. Так же важны регулярные осмотры у стоматолога, которые помогут выявить и решить проблемы на ранних стадиях».
-У маленьких детей, по возможности, убрать ночные кормления, особенно соки и компоты. Так же важны регулярные осмотры у стоматолога, которые помогут выявить и решить проблемы на ранних стадиях».С чего начинать знакомство с чисткой зубов
Начинать знакомство с гигиеной рта стоит с появления первого зуба. Тогда в дальнейшем ребенок будет воспринимать чистку зубов такой же постоянной частью дня как еда и сон. Для знакомства можно купить ребенку щетку с ограничителем. Затем, когда зубов уже три-четыре, лучше переходить на зубную щетку с мягкой щетиной.
Первые пасты лучше покупать с приятным вкусом, а щетки — яркие или в виде игрушки. Но кроме этого первая паста должна быть маркирована по возрасту 0−3. Такую пасту можно съесть безопасно для ребенка, так как она сертифицируется как пищевой продукт. Даже детям до года нужно чистить зубы с пастой, она не только счищает налет, но и не позволяет микробам приклеиваться обратно к зубу. А вот силиконовый напальчник не счищает налет, поэтому его можно использовать только как элемент игры и для того чтобы ребенок привыкал к чистке.
После шести лет можно добавить к уходу ирригаторы, ополаскиватели и зубные нити.
Как правильно чистить зубы
Для закрепления положительных ассоциаций с чисткой зубов, лучше делать это в игровой форме, чистить зубы игрушкам или друг другу. Показывать, что родители каждый день ухаживают за зубами и объяснять, что ребенок тоже будет чистить зубы сам, но когда подрастет. В этом случае, когда малышу доверяют самостоятельный уход — это вызывает гордость и стремление как можно лучше справиться с задачей.
Совсем малышей можно отвлекать игрушками, а детям после трех-четырех лет, в зависимости от сознательности ребенка, можно устроить эксперимент. Прополоскать рот ополаскивателем с индикатором зубного налета, а потом почистить зубы. Плохо очищенные места останутся синими и будет видно, каким зонам нужно уделять больше внимания. Если другими способами не получается, можно чистить зубы под мультики, ведь от просмотров двух раз в день по пять минут мультфильмов вреда ребенку будет меньше, чем от нечищенных зубов.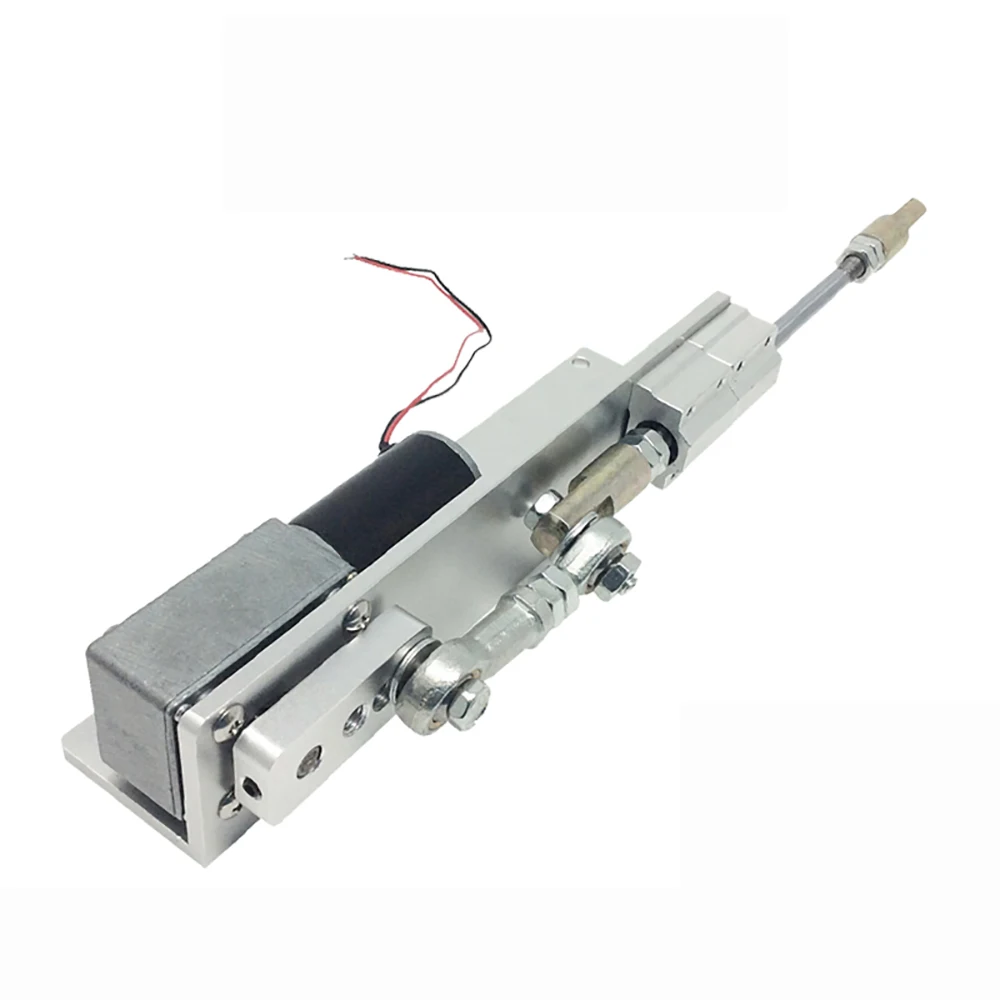
Обычной щеткой зубы надо чистить выметающими движениями от десны к зубу, по десять движений на каждый зуб, а звуковой — по пять-шесть движений. Электрической щеткой водят по зубам, задерживаясь по 1−1,5 секунды на каждом зубе. Ухаживать за зубами нужно минимум два раза в день: утром после завтрака и вечером перед сном. Если в рационе ребенка есть сладкие продукты: булочки, печенье, соки и компоты, то чисткой стоит заниматься после каждого приема сладкой липкой пищи.
Кроме тщательной чистки зубов, задача родителей следить, чтобы уход за зубами не приносил боли и дискомфорта, чтобы не было негативных ассоциаций и отказа от чистки в дальнейшем. Поэтому зубы нужно чистить тщательно, но без сильного давления и резких движений щетки.
Между зубами находится уздечка губы, поэтому в области передних верхних зубов, левые и правые нужно чистить по отдельности, чтобы и не зацепить уздечку щеткой.
Как часто нужно посещать стоматолога
«ВОЗ рекомендует осмотры в месяц, в год, в 2 года, далее раз в 6 месяцев, — советует Дмитрий Рябов, — но месячных детей приносят редко, только с короткой уздечкой языка, по направлению от неонатолога или педиатра.
 В год я обычно провожу осмотр и рассказываю родителям о молочных зубах, их гигиене, возможных проблемах, о важности профилактических визитов. Так что первый визит идеально проводить в годовалом возрасте».
В год я обычно провожу осмотр и рассказываю родителям о молочных зубах, их гигиене, возможных проблемах, о важности профилактических визитов. Так что первый визит идеально проводить в годовалом возрасте».Если зуб прорезался с дефектом, нужно как можно скорее посетить стоматолога, так как это входные ворота для инфекции и быстрого развития кариеса. Также не стоит откладывать визит, если появился налет, который не счищается щеткой, темные пятна на зубах или покраснела и увеличилась десна. И конечно, если ребенок жалуется на боль, отказывается от твердой пищи или зуб сломался при падении.
Чтобы научить ребенка ухаживать за зубами, чистка зубов должна входить в ежедневный ритуал с появления первого зуба.
Щетки и пасты должны быть маркированы по возрасту и быть привлекательными для малыша.
Чистить зубы надо тщательно, но бережно, чтобы не повредить уздечку и не причинить боль.
Лучший способ — показывать ребенку как взрослые уделяют внимание своим зубам, тогда для него чистка будет привлекательным «взрослым» занятием.
Источник — www.eapteka.ru
Сухаревский В.В. Преобразователь возвратно-поступательного движения во вращательное и двигатель на его основе
Сухаревский Владимир Владимирович
Компания Ланмотор
Москва, кандидат физико-математических наук, ведущий научный сотрудник
Sukharevskiy Vladimir Vladimirovich
Lanmotor company
Moscow, PhD in Physics, leading researcher
Библиографическая ссылка на статью:
Сухаревский В.В. Преобразователь возвратно-поступательного движения во вращательное и двигатель на его основе // Современные научные исследования и инновации. 2018. № 8 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2018/08/87427 (дата обращения: 23.05.2021).
Предложенное изобретение относится к машиностроению, в частности, к преобразователям механического движения, основанным на них двигателям, транспортным средствам и электрогенераторам. Может применяться в двигателестроении, автомобилестроении, электроэнергетике и других областях.
Известен двухтактный двигатель с бесконтактным магнитным преобразователем возвратно-поступательного движения во вращательное [1], [2], содержащий:
— пару роторов, вращающихся противоположно друг другу, с закрепленными на указанных роторах магнитами роторов,
— пару штоков, движущихся возвратно-поступательно противоположно друг другу вдоль оси вращения роторов, с закрепленными на указанных штоках магнитами штоков,
— корпус и подшипники,
— одноименные полюса магнитов роторов, обращенные к штокам, расположены вдоль линий на цилиндрических рабочих поверхностях, имеющих в направлении оси вращения ротора, по крайней мере, один локальный максимум и один локальный минимум,
— указанные линии таковы, что когда полюса магнитов одного штока достигают в крайней точке своего движения областей локальных максимумов указанных линий одного ротора, полюса магнитов другого штока также достигают крайней точки своего движения, но в областях локальных минимумов указанных линий этого же ротора.
Недостатком указанного решения является то, что удельная по весу сила взаимодействия магнитов роторов и штоков невелика. Это связано с малой площадью взаимодействия полюсов и приводит к громоздкости двигателя и высокой удельной по мощности двигателя стоимости магнитов. Каждый магнит ротора или штока участвует в силовом взаимодействии только одним своим полюсом, так как только один полюс выведен на цилиндрическую рабочую поверхность.
Известны преобразователи возвратно-поступательного движения во вращательное движение [3], [4], [5], [6], также использующие взаимодействие движущихся возвратно-поступательно магнитов штоков и вращающихся волнообразных магнитов роторов. Однако и здесь протяженные в радиальном направлении магниты имеют небольшую поверхность взаимодействия друг с другом, и как следствие низкую эффективность.
Необходимо подчеркнуть, что все известные аналоги имеют только две цилиндрические рабочие поверхности, на которых происходит передача мощности от штока к ротору, а именно это одна цилиндрическая рабочая поверхность штока и одна цилиндрическая рабочая поверхность ротора. Эти поверхности ограничивают воздушный зазор между магнитами штоков и магнитами роторов.
Эти поверхности ограничивают воздушный зазор между магнитами штоков и магнитами роторов.
Технический результат изобретения заключается в создании бесконтактного магнитного преобразователя возвратно-поступательного движения во вращательное движение, с движущимися противоположно друг другу штоками и противоположно вращающимися роторами, который может использоваться в двигателе внутреннего сгорания, который в свою очередь используется в генераторной установке и/или транспортном средстве.
Преобразователь возвратно-поступательного движения во вращательное движение, содержащий:
— пару роторов, вращающихся противоположно друг другу, с закрепленными на указанных роторах магнитами роторов,
— пару штоков, движущихся возвратно-поступательно противоположно друг другу вдоль оси вращения роторов, с закрепленными на указанных штоках магнитами штоков,
— корпус и подшипники,
— одноименные полюса магнитов роторов, обращенные к штокам, расположены вдоль линий на цилиндрических рабочих поверхностях, имеющих в направлении оси вращения ротора, по крайней мере, один локальный максимум и один локальный минимум,
— указанные линии таковы, что когда полюса магнитов одного штока достигают в крайней точке своего движения областей локальных максимумов указанных линий одного ротора, полюса магнитов другого штока также достигают крайней точки своего движения, но в областях локальных минимумов указанных линий этого же ротора,
отличающийся тем, что, по крайней мере, часть магнитов роторов и/или магнитов штоков выведены полюсами одновременно на несколько концентрических цилиндрических рабочих поверхностей.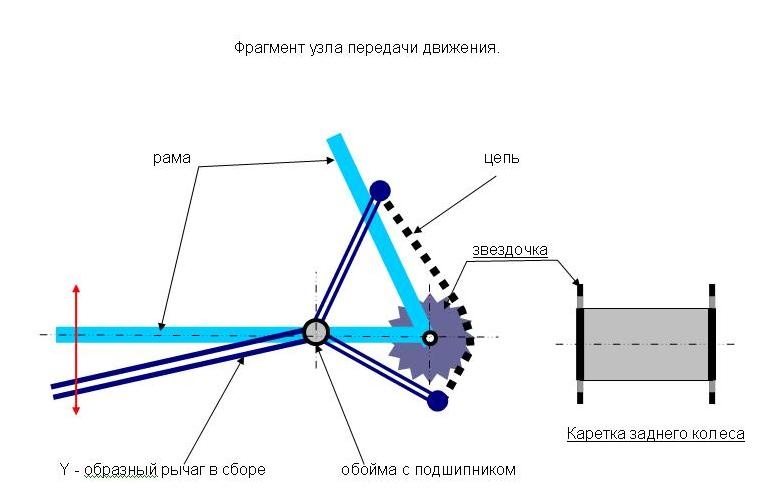
Указанная замкнутая линия может представлять собой непрерывную кривую, ломаную или их комбинацию. Линия является воображаемой и отражает зону действия полюсов магнита ротора. Из соображений конструктивной простоты лучше использовать ломаную кривую, состоящую из эллиптических дуг. Указанная ломаная кривая образуется сечением цилиндрической рабочей поверхности плоскостями.
Штоки движутся всегда с одинаковой амплитудой в противофазе, т.е. в противоположных направлениях, одновременно достигая крайних положений своего движения, что должно обеспечиваться внешним к преобразователю синхронизатором или конструкцией двигателя, где преобразователь используется.
Указанная линия должна быть такой формы, чтобы, когда полюса магнитов одного штока достигают локальных максимумов линии полюсов ротора, полюса магнитов другого штока – локальных минимумов указанной линии того же ротора. В таком случае при движении штоков будет создаваться вращающий момент на роторе.
Под локальным минимумом и локальным максимумом понимаются соответственно локальный минимум и локальный максимум по оси Z, совпадающей с осью ротора трехмерной функции, во всех точках совпадающей с указанной замкнутой линии.
ФИГ.1 Магнитная система преобразователя с магнитами штоков 1, дополнительными магнитами штоков 2, расположенными на штоках 4, движущимися возвратно-поступательно, что обозначено двойной стрелкой. Магниты роторов 3 вращаются вместе с роторами (на Фиг.1 не показаны) в соответствующих направлениях (показаны стрелками). Штоки 4 состоят из цилиндрической части, обеспечивающей скольжение по направляющей и изогнутых пластин, на которых непосредственно закреплены магниты штоков 1 и дополнительные магниты штоков 2.
ФИГ.2 Увеличенная часть магнитной системы с магнитами штоков 1, дополнительными магнитами штоков 2, на штоках 4 и вращающимися вместе с роторами (на Фиг.2 не показаны) магнитами роторов 3. Показан угол ∂ между краями полюсов магнитов ротора в плоскости перпендикулярной оси ротора, который будем называть угловым межполюсным расстоянием. Плоскость сечения указана пунктиром, вид указан пунктирной стрелкой. Сечение будет показано на Фиг.3
Сечение будет показано на Фиг.3
Все магниты имеют преимущественно радиальную намагниченность, т.е. вектор магнитной индукции, создаваемой магнитами штоков и магнитами роторов, направлен вдоль радиуса в каждой точке магнита. При другом типе намагниченности эффективность работы преобразователя снижается.
Подшипники, в том числе направляющие штоков, могут быть использованы любые – качения, скольжения, магнитные и т.д. В отдельных случаях роль подшипника могут играть части других узлов, например, корпуса.
Штоки должны двигаться на направляющих, а ротор – вращаться на подшипниках, не дающих ему в рабочем режиме (режиме передачи мощности) возможности перемещаться поступательно вдоль оси движения штока. Оси вращения роторов и оси возвратно-поступательного движения штоков должны совпадать.
ФИГ.3 Сечение магнитов роторов 3, магнитов штоков 1 и дополнительных магнитов штоков 2 в плоскости перпендикулярной оси роторов. Показан угол ∂, а также угол видимости магнита ротора γ и угловое расстояние между магнитом штока и дополнительным магнитом штока ψ. Штоки на Фиг.3 не показаны. Сечение указано пунктиром на Фиг.2, вид по пунктирной стрелке (снизу).
Показан угол ∂, а также угол видимости магнита ротора γ и угловое расстояние между магнитом штока и дополнительным магнитом штока ψ. Штоки на Фиг.3 не показаны. Сечение указано пунктиром на Фиг.2, вид по пунктирной стрелке (снизу).
Под цилиндрической рабочей поверхностью понимается поверхность, на которую выведены полюса магнитов штоков или магнитов роторов, взаимодействующих через небольшой воздушный (или газовый в случае произвольной газовой среды) зазор с полюсами магнитов роторов или магнитов штоков соответственно. Концентрические цилиндрические рабочие поверхности – это несколько цилиндрических рабочих поверхностей на одной оси, совпадающей с осью вращения роторов, но разными радиусами.
Главное отличие предлагаемого преобразователя от прототипа в том, что у него имеется более двух концентрических цилиндрических рабочих поверхностей, на которых происходит передача мощности от штоков к роторам посредством магнитного взаимодействия. Сила магнитного взаимодействия слабо зависит от глубины магнита в радиальном направлении, начиная с некоторой толщины магнита. Таким образом, для эффективного использования магнитов, надо увеличивать площадь поверхности взаимодействия, уменьшая глубину магнитов в радиальном направлении. В предлагаемом преобразователе это осуществляется выведением полюсов магнитов роторов и/или штоков одновременно на две концентрические цилиндрические рабочие поверхности. При этом в силовом магнитном взаимодействии, в отличие от прототипа, участвуют одновременно оба полюса магнита штока и/или ротора, выведенного сразу на две цилиндрические концентрические рабочие поверхности. Таким образом, можно увеличить силу магнитного взаимодействия магнитов штоков и роторов при том же (или меньшем) объеме магнитов штоков и роторов, по сравнению с прототипом. Это позволяет облегчить штоки, что в дальнейшем позволит поднять частоту и мощность двигателя на основе предлагаемого преобразователя.
Таким образом, для эффективного использования магнитов, надо увеличивать площадь поверхности взаимодействия, уменьшая глубину магнитов в радиальном направлении. В предлагаемом преобразователе это осуществляется выведением полюсов магнитов роторов и/или штоков одновременно на две концентрические цилиндрические рабочие поверхности. При этом в силовом магнитном взаимодействии, в отличие от прототипа, участвуют одновременно оба полюса магнита штока и/или ротора, выведенного сразу на две цилиндрические концентрические рабочие поверхности. Таким образом, можно увеличить силу магнитного взаимодействия магнитов штоков и роторов при том же (или меньшем) объеме магнитов штоков и роторов, по сравнению с прототипом. Это позволяет облегчить штоки, что в дальнейшем позволит поднять частоту и мощность двигателя на основе предлагаемого преобразователя.
В предлагаемом преобразователе цилиндрических концентрических рабочих поверхностей, как минимум, четыре, так как имеется, как минимум, два зазора.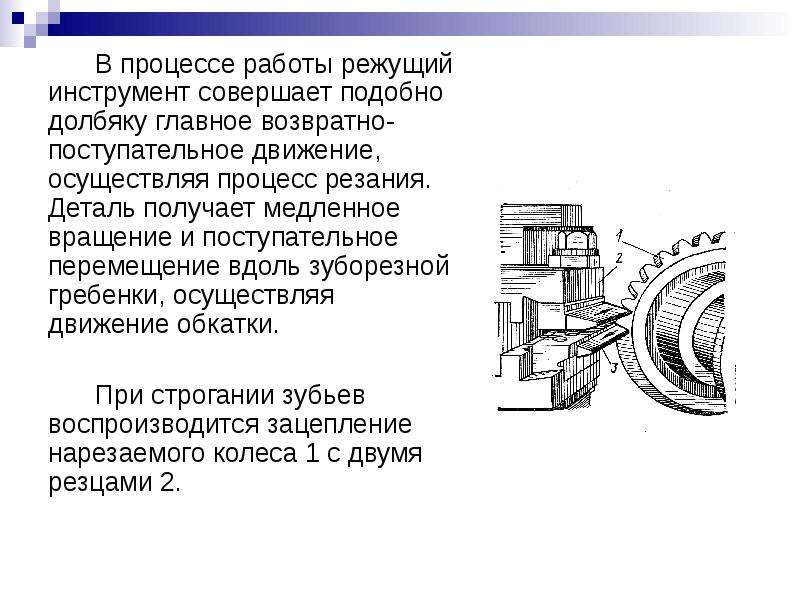 Например, магниты штоков выведены полюсами одновременно на две концентрические цилиндрические рабочие поверхности радиусами R1 и R2, и взаимодействуют через два зазора с полюсами магнитов роторов, выведенных полюсами на две концентрические цилиндрические рабочие поверхности радиусами R1 — ΔR и R2+ΔR, где ΔR – ширина зазора. В данном примере в качестве «средней» части магнитной системы выступают магниты штоков. Это удобно для применения в двигателе внутреннего сгорания. В качестве «средней» части магнитной системы можно использовать магниты роторов. Тогда магниты роторов будут выведены одновременно своими полюсами на две концентрические цилиндрические рабочие поверхности с радиусами R1 и R2, и будут взаимодействовать через зазоры с полюсами магнитов штоков, выведенных полюсами на две концентрические цилиндрические рабочие поверхности радиусами R1 — ΔR и R2+ΔR, где ΔR – ширина зазора. В общем случае суммарное количество концентрических цилиндрических рабочих поверхностей у предложенного преобразователя может быть 2N, где N – любое натуральное число, большее единицы.
Например, магниты штоков выведены полюсами одновременно на две концентрические цилиндрические рабочие поверхности радиусами R1 и R2, и взаимодействуют через два зазора с полюсами магнитов роторов, выведенных полюсами на две концентрические цилиндрические рабочие поверхности радиусами R1 — ΔR и R2+ΔR, где ΔR – ширина зазора. В данном примере в качестве «средней» части магнитной системы выступают магниты штоков. Это удобно для применения в двигателе внутреннего сгорания. В качестве «средней» части магнитной системы можно использовать магниты роторов. Тогда магниты роторов будут выведены одновременно своими полюсами на две концентрические цилиндрические рабочие поверхности с радиусами R1 и R2, и будут взаимодействовать через зазоры с полюсами магнитов штоков, выведенных полюсами на две концентрические цилиндрические рабочие поверхности радиусами R1 — ΔR и R2+ΔR, где ΔR – ширина зазора. В общем случае суммарное количество концентрических цилиндрических рабочих поверхностей у предложенного преобразователя может быть 2N, где N – любое натуральное число, большее единицы.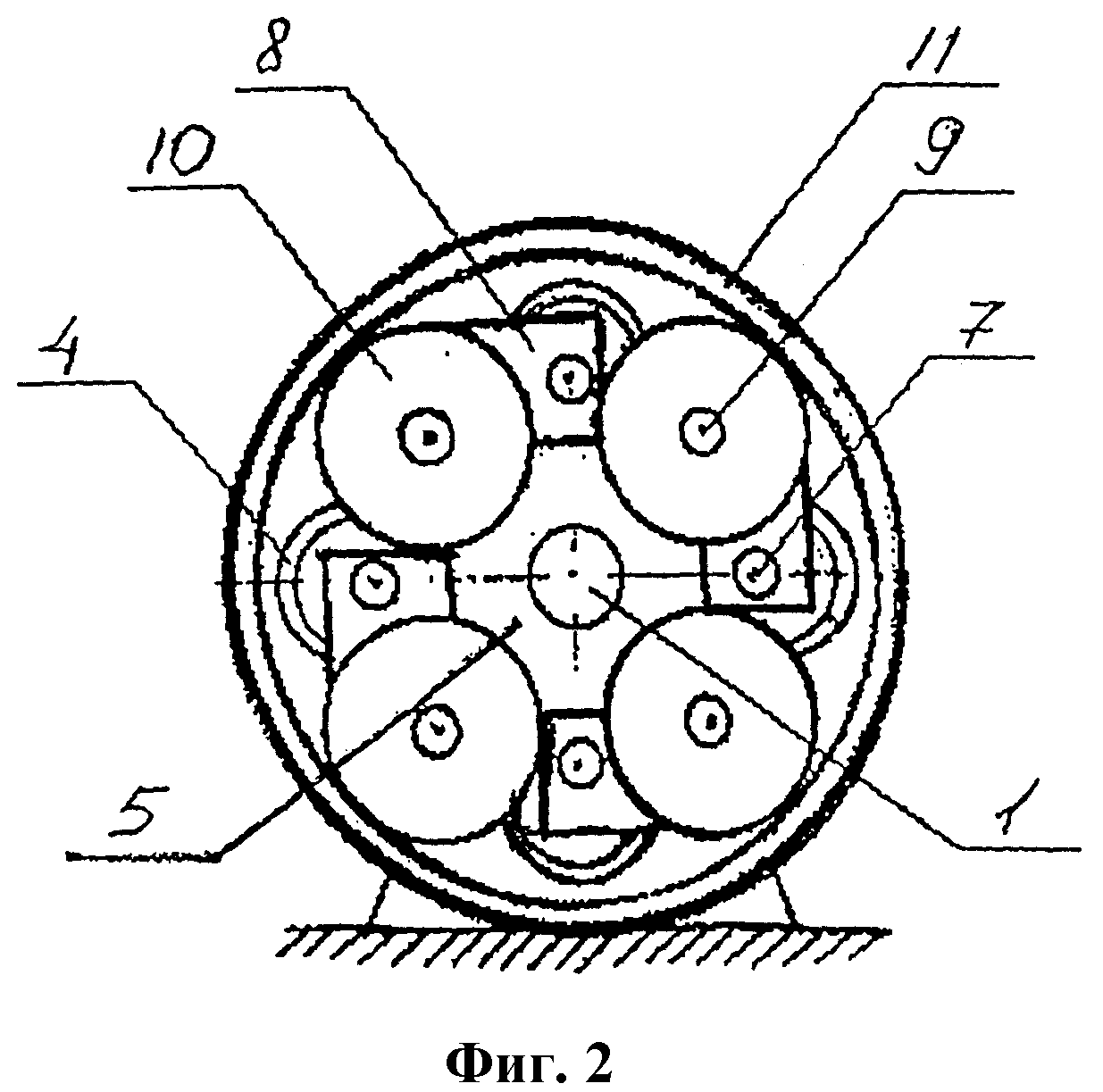 При N>2 выведенными одновременно на две концентрические цилиндрические рабочие поверхности оказываются как полюса магнитов роторов, так и полюса магнитов штоков, в силу того, что магниты роторов и магниты штоков для правильной работы преобразователя должны чередоваться в радиальном направлении.
При N>2 выведенными одновременно на две концентрические цилиндрические рабочие поверхности оказываются как полюса магнитов роторов, так и полюса магнитов штоков, в силу того, что магниты роторов и магниты штоков для правильной работы преобразователя должны чередоваться в радиальном направлении.
Угловое направление и осевое направление вдоль оси штока понимаются соответственно как угол и координата в цилиндрических координатах, где ось координат направлена вдоль оси ротора.
Под углом видимости магнита ротора понимается угловое расстояние между краями магнита ротора в плоскости, перпендикулярной к оси ротора с вершиной угла в точке пересечения этой плоскости и оси ротора.
Аналогично, под углом видимости межполюсного промежутка магнитов ротора понимается угловое расстояние между краями соседних полюсов магнитов ротора в плоскости, перпендикулярной к оси ротора с центром в точке пересечения этой плоскости и оси ротора.
Под рабочим режимом преобразователя понимается режим передачи мощности от движущегося возвратно-поступательно штока к вращающимся роторам. В рабочем режиме магниты одного ротора, полюсами выведенные на разные концентрические цилиндрические рабочие поверхности, должны быть неподвижны друг относительно друга. Для достижения наибольшей магнитной силы, обращенные друг к другу полюса магнитов ротора, находящиеся на одном уровне по оси ротора, должны иметь противоположную полярность, а локальные максимумы и минимумы указанных линий одного ротора должны достигаться при одинаковых углах цилиндрической системы координат относительно оси роторов.
В случае двух зазоров в радиальном направлении, и соответственно, четырех концентрических цилиндрических рабочих поверхностей, возможно два варианта компоновки магнитной системы:
1) полюса магнитов ротора выведены одновременно на две концентрические цилиндрические рабочие поверхности, ротор вращается между движущимися возвратно-поступательно штоками, а полюса магнитов каждого штока выведены каждая на свою одну цилиндрическую рабочую поверхность, при этом обращенные друг к другу полюса магнитов одного штока имеют противоположную полярность на одном уровне по оси роторов;
2) полюса магнитов штоков выведены одновременно на две концентрические цилиндрические рабочие поверхности, ротор вращается вокруг движущихся возвратно-поступательно штоков, а полюса магнитов роторов выведены каждая на свою одну цилиндрическую рабочую поверхность, при этом обращенные друг к другу полюса магнитов одного ротора имеют противоположную полярность на одном уровне по оси роторов.
Полюса магнитов, противоположные выведенным на цилиндрическую рабочую поверхность, предпочтительно замыкать магнитопроводом для увеличения магнитного потока в воздушном зазоре, например, «спинка» ротора в указанном выше варианте 2) может быть выполнена из электротехнической стали.
Корпус и подшипники преобразователя должны обеспечивать указанные выше черты и взаимодействие частей преобразователя. В качестве корпуса или его элементов могут быть использованы другие элементы. Например, при использовании преобразователя в двигателе внутреннего сгорания корпусом может быть труба с цилиндрами, а поршни – скользящими направляющими штоков.
Магниты роторов имеют достаточно сложную форму, что удорожает их изготовление. Поэтому можно выполнять полюса роторов наборными с единым полюсным наконечником из материала с высокой магнитной проницаемостью, например, из электротехнической стали.
Раскрытое выше изобретение может быть изготовлено в различных модификациях, укажем особенности одной из них.
Модификация. Раскрытый выше преобразователь, обладающий указанными ниже в пп.1-5 дополнительными характеристиками.
1. Для, по крайней мере, одного магнита штока имеется дополнительный магнит штока, выведенный на ту же цилиндрическую рабочую поверхность полюсами противоположной полярности на том же уровне по оси ротора.
Дополнительный магнит штока устанавливается преимущественно на той координате по оси ротора Z (другими словами, на том же уровне по оси роторов) что и основной полюс. Максимальный вклад таких же по размеру дополнительных магнитов штоков в магнитное взаимодействие магнитов штоков и роторов равен вкладу магнитов штоков, поэтому можно добиться удвоения магнитной силы взаимодействия при неизменном объеме магнитов роторов.
2. Угловое расстояние дополнительного полюса штока от основного полюса штока равно сумме углов видимости от оси роторов полюса магнита ротора и межполюсного промежутка. При таком угловом расстоянии магнитная сила взаимодействия магнитов штоков и роторов наибольшая.
3. Магниты каждого штока одновременно взаимодействуют с магнитами обоих роторов. При такой компоновке магнитной системы при работе преобразователя используются магниты роторов, установленные как под одним (положительный наклон), так и под другим углом (отрицательный наклон) по отношению к плоскости перпендикуляра к оси ротора. При этом возрастает площадь взаимодействующих магнитных полюсов при неизменной конфигурации роторов. Соответственно, возрастает магнитная сила взаимодействия и максимальная передаваемая мощность.
4. Преобразователь имеет дополнительные полюса магнитов ротора, выведенные на ту же цилиндрическую рабочую поверхность полюсами той же полярности, как и полюса магнитов ротора, к которым дополнительные полюса магнитов ротора примыкают. Дополнительные полюса магнитов роторов необходимы для увеличения силы взаимодействия полюсов штоков и роторов при движении штоков вблизи мертвых точек. Примыкание этих дополнительных полюсов осуществляется через зазор, равный по линейному расстоянию межполюсному зазору, около «плато» магнитов роторов.
ФИГ.4 Магниты ротора 3 и дополнительные магниты роторов 5. Буквами S и N для примера обозначены полюса магнитов. Полюса могут быть расположены иначе. Намагниченность магнитов роторов 3, 5 а также штоков 1, 2 радиальная, то есть вектор магнитной индукции направлен к оси вращения или от оси вращения. Показаны только магниты внешней части одного ротора 6 (сам ротор на Фиг.4 не показан).
5. Магниты роторов могут при необходимости поворачиваться и/или сдвигаться друг относительно друга. Такая необходимость может возникнуть для выведения преобразователя из рабочего режима и перехода на «холостой» ход. Например, при сдвиге в осевом направлении одного из рядов магнитов ротора таким образом, что обращенные друг к другу полюса магнитов роторов имеют одинаковую полярность, суммарный магнитный поток в зазоре близок к нулю, и штоки осуществляют холостой ход, то есть движутся без связи с роторами. При выполнении части магнитов роторов с возможностью перемещения, например сдвига внутренней части ротора со всеми магнитами этой части ротора на расстояние длины магнита ротора и межполюсного зазора вдоль оси роторов, можно сделать суммарное силовое взаимодействие магнитов роторов и штоков близким к нулю. Действительно, если например, магниты роторов обращены одноименными полюсами к полюсам магнитов штоков для любой координаты Z (другими словами, на том же уровне по оси роторов), их суммарное магнитное поле близко к нулю. Таким образом, можно при необходимости выводить преобразователь из режима передачи мощности (рабочего режима). Это может потребоваться, например, как функция сцепления для переключения передачи механической коробки передач в транспортном средстве.
ФИГ.5 Один из роторов 6 с магнитами ротора 3 и дополнительными магнитами ротора 5, вращающийся относительно неподвижного корпуса 7. Внутренняя часть ротора 6 выполнена с возможностью сдвига вдоль оси вращения, посредством толкателя 8, соединенного с внутренней частью ротора 6 посредством опорного подшипника 9. На внутренней части ротора 6 количество рядов магнитов 3 в осевом направлении на один больше, чем на внешней части. Это необходимо для того, чтобы при сдвиге внутренней части ротора 6 вниз на расстояние высоты магнита ротора 3 и межполюсного промежутка в осевом направлении, магнитное поле от магнитов ротора 3 в области нахождения магнитов штоков 1 и 2 было близким к нулю. Штоки и магниты штоков на Фиг. 5 не показаны. Для наглядности в корпусе 7, наружной части ротора 6 и толкателе 8 сделан цилиндрический вырез. Направление сдвига (вниз) указано стрелками.
Двигатель, использующий описанный преобразователь, может быть как тепловым внутреннего или внешнего сгорания, так и, например, пневматическим или гидравлическим. При использовании в двигателе внутреннего сгорания удобнее использовать двухтактный цикл с самовоспламенением от сжатия.
ФИГ.6 Вырез внутренней части ротора 6 с магнитами ротора 3 и дополнительными магнитами ротора 5, магниты 3 внешней части ротора 6 и дополнительные магниты внешней части ротора 6. Для наглядности внешняя часть ротора 6 не показана, а часть штоков 4 с магнитами штоков 1 и дополнительными магнитами штоков 2 показаны. Буквами S и N обозначены полюса магнитов. Направление намагниченности чередуется в направлении оси вращения.
На штоки устанавливаются поршни, например, из графита, для возможности работы без жидкой смазки. Цилиндры являются направляющими штоков (для некоторых частей штока могут быть и дополнительные направляющие).
Более эффективно использовать преобразователь по Модификации. При этом противоположно движущиеся поршни через штоки взаимодействуют одновременно с двумя противоположно вращающимися роторами, т.е. в рабочем режиме синхронизированы. Кроме того, более полно используются дорогостоящие магниты ротора, так как при каждом движении штоков задействованы оба наклона (положительный и отрицательный) указанных линий на цилиндрических поверхностях.
ФИГ.7 Часть двигателя с преобразователем: соединение наружных поршней 10 с тягами 11 и одним из штоков 4, а также соединение внутренних поршней 10 между собой соединителем поршней 12 и с другим штоком 4. Для наглядности цилиндрическая часть штоков 4 не показана
Двухтактный двигатель имеет два рабочих цилиндра на одной оси и две пары встречно-движущихся поршней с ограничителями хода поршней, прямоточную бесклапанную продувку. Два поршня двигателя жестко связаны с одним штоком преобразователя, а два других поршня соединены между собой и вторым штоком преобразователя.
ФИГ.8 Часть двигателя с преобразователем: цилиндрические части штоков 4 и направляющая скольжения 13, поршни 10, тяги 11
Использование именно двух цилиндров двигателя обусловлено тем, что при использовании одного цилиндра двигателя не удается добиться устойчивой работы под нагрузкой, а при трех и более цилиндрах появляется необходимость добиваться одновременности начала сгорания в двух и более цилиндрах, а также повышается внутреннее трение поршней о цилиндры.
ФИГ.9 Часть двигателя с преобразователем: видна связь одного штока 4 с тягами 11, а другого штока 4 с соединителем внутренних поршней 12
Ограничители хода поршней предотвращают смещение точки максимального сближения поршней в цилиндре двигателя при выходе одного из штоков из синхронизации с роторами. В такой нештатной ситуации преобразователь должен вернуться в рабочий режим в течение одного хода штока.
ФИГ.10 Часть двигателя с преобразователем: цилиндр 14 с впускными 15 и выпускными 16 окнами. Нижняя часть корпуса 7 и цилиндрические части штоков с направляющими не показаны
При использовании графитовых поршней и цилиндра из прецизионного сплава с очень низким температурным коэффициентом линейного расширения в рабочем диапазоне температур двигателя (например, инвар), можно полностью отказаться от уплотнительных колец в двигателе.
ФИГ.11 Общий вид двигателя с преобразователем: показаны ограничители хода поршней 17, подшипники роторов 18, выпускные коллекторы 19 и впускной коллектор 20
ФИГ.12 Двигатель в авиационном исполнении: показан обтекатель 21 и лопасти 22 установленные непосредственно на роторах 6. Впускной и выпускной коллекторы не показаны.
Для использования в авиации, на роторах преобразователя расположены лопасти воздушных винтов, а цилиндры двигателя расположены в трубе, являющейся корпусом преобразователя. Удобством такой конструкции двигателя является возможность установки противоположно вращающихся лопастей без редукторов.
ФИГ.13 Двигатель в автомобильном исполнении: непосредственно на одном из роторов 6 установлен обод колеса 23
Для использования в сухопутном транспортном средстве, на роторе преобразователя закрепляется привод к коробке передач или колесо транспортного средства. Для использования в водном транспорте роторы преобразователей соединяются с гребными винтами посредством привода.
Генераторная установка, использующая двигатель на основе предлагаемого преобразователя, может иметь привод от роторов преобразователя или на роторы преобразователя могут быть непосредственно смонтированы роторы генератора. Также, магниты роторов могут использоваться для непосредственной генерации тока в обмотках статора.
Транспортное средство, использующее двигатель и/или генераторную установку с преобразователями по настоящему изобретению, может быть воздушным, водным, сухопутным.
Автомобиль, использующий двигатель на основе предлагаемого преобразователя, может иметь привод от роторов на коробку передач или непосредственно на колеса. Непосредственный привод более выгоден с точки зрения экономичности транспортного средства. Также автомобиль может использовать генераторную установку на основе предлагаемого двигателя и преобразователя для питания тяговых электромоторов и батарей.
Осуществление изобретения.
На Фиг. 1 представлена внутренняя часть одного из вариантов предложенного преобразователя. Магниты штоков 1 и дополнительные магниты штоков 2 через воздушный зазор взаимодействуют с магнитами роторов 3. Стрелками показано направление вращения магнитов роторов 3 и возвратно-поступательное движение штоков 4. Верхняя группа магнитов роторов 3 относится к одному ротору, нижняя – к другому ротору. Сами роторы, на которых закреплены магниты роторов, а также подшипники и корпус на Фиг.1 не показаны.
На Фиг.2 более крупно показана часть магнитов роторов 3, штоки 4 с магнитами штоков 1 и дополнительными магнитами штоков 2. Пунктирной линией показана линия сечения и стрелкой направление взгляда на сечение. Сечение показано на Фиг.3. Угол ψ является угловым расстоянием между магнитом штока 1 и дополнительным магнитом штока 2. Угол γ – это угловое расстояние между краями магнита ротора 3, другими словами, угол видимости магнита ротора 3 из точки на оси ротора в плоскости, перпендикулярной этой оси. Аналогично, угол ∂ — это угол видимости межполюсного расстояния магнитов ротора 3 из точки на оси ротора в плоскости, перпендикулярной этой оси. Для преобразователя по Модификации должно выполняться соотношение ψ = γ + ∂, при выполнении которого вклад в магнитную силу от взаимодействия магнитов роторов 3 и дополнительных магнитов штоков 2 максимален, так как магнитная сила от этого вклада направлена в ту же сторону, что и от взаимодействия магнитов роторов 3 и магнитов штоков 1.
На Фиг.4 показаны магниты 3 внешней части одного из роторов, а также дополнительные магниты 5 внешней части этого ротора. Буквами N и S указана полярность магнитов. Полярность может быть и другой, важно только, чтобы полярность магнитов ротора 3 чередовалась в направлении оси ротора, а полярность дополнительного магнита ротора 5 совпадала с полярностью магнита ротора 3, к которому он прилегает.
При движении штоков 4 возвратно-поступательно под действием внешней силы, магниты штоков 1 и дополнительные магниты штоков 2 (при их наличии), движутся относительно ротора между магнитами роторов 3 по равновесной траектории, зависящей от внешней нагрузки. При этом штоки 4, двигаясь навстречу друг другу или друг от друга, воздействуют на магниты роторов 3, заставляя их вращаться вместе с роторами.
Условной механической аналогией является взаимодействие по типу «винт-гайка», т.к. указанная линия полюсов магнитов роторов имеет определенные наклоны относительно плоскости, перпендикулярной к оси роторов. Наклоны могут быть плавно изменяющимися от положительного к отрицательному для волнистой линии полюсов магнитов роторов 3, или изменяющимися ступенчато (постоянно-положительный на постоянно-отрицательный с проходом через ноль) для ломаной указанной линии.
При взаимодействии магнитов штоков 1 и дополнительных магнитов штоков 2 обоих штоков 4 с обеими группами магнитов роторов 3 и дополнительных магнитов роторов 5, принадлежащих к вращающимся в противоположные стороны роторам, модули наклонов должны быть преимущественно одинаковыми в областях взаимодействия магнитов штоков 1 и магнитов роторов 3, а сами наклоны – противоположными. При таком взаимодействии максимально используются магниты роторов 3, и общая эффективность преобразователя увеличивается.
Минимум и/или максимум указанной линии полюсов магнитов роторов 3 может быть определенной продолжительности, типа “плато”, как показано на Фиг.1, 2 и 4. Это может дать возможность увеличить время нахождения штока 4 вблизи мертвых точек, например, для улучшения процессов газообмена в двигателе, использующем предлагаемый преобразователь. Кроме того, наличие «плато» увеличивает эффективность использования дополнительных полюсов штоков 2 при прохождении мертвых точек.
Роторы 6 вращаются в противоположные стороны, поэтому реактивные вращающие моменты компенсируются внутри каждого штока 4 и нет необходимости предотвращать вращение штоков 4 вокруг собственной оси. Это существенно упрощает конструкцию и снижает трение.
Максимальная сила взаимодействия магнитов штоков 1 и дополнительных магнитов штоков 2 с магнитами роторов 3 достигается, если магниты штоков 1 и дополнительные магниты штоков 2 проходят при работе преобразователя относительно ротора над серединой межполюсного промежутка магнитов ротора 3. Дополнительные магниты ротора 5 поддерживают высокий уровень магнитной силы взаимодействия при подходе к мертвым точкам. Для высокого уровня магнитной силы необходимо, чтобы дополнительный магнит штока 2 на ту же рабочую цилиндрическую поверхность был выведен противоположным магниту штока 1 полюсом. Тогда при чередующихся полярностях магнитов роторов 3 магниты штоков 1 и дополнительные магниты штоков 2 будут взаимодействовать сразу со всеми ближайшими магнитами роторов 3 и дополнительными магнитами роторов 5, увеличивая уровень магнитной силы взаимодействия.
Поскольку магниты штоков 1 и дополнительные магниты штоков 2 выведены полюсами сразу на две концентрические цилиндрические рабочие поверхности, каждый магнит штока 1 взаимодействует сразу с четырьмя магнитами ротора 3, и каждый дополнительный магнит штока 2 также взаимодействует одновременно с четырьмя магнитами ротора 3.
Для увеличения магнитной силы можно наращивать число рядов магнитов штоков 1, дополнительных магнитов штоков 2, магнитов роторов 3 и дополнительных магнитов роторов 5 как в осевом, так и в радиальном направлении. При этом сразу на две рабочие цилиндрические поверхности могут быть выведены как магниты штоков 1 и дополнительные магниты штоков 2, так и магниты роторов 3. При чередовании нескольких «слоев» магнитов штоков 1 и дополнительных магнитов штоков 2 с магнитами роторов 3 в радиальном направлении может быть реализована ситуация, когда часть магнитов роторов 3 и часть магнитов штоков 1 и дополнительных магнитов штоков 2 выведены сразу на две цилиндрические концентрические рабочие поверхности. При выборе конструкции необходимо руководствоваться требуемым диаметром и длиной преобразователя, а также простотой изготовления и легкостью штоков 4 с магнитами штоков 1 и дополнительными магнитами штоков 2.
Векторы намагничивания магнитов штоков 1 и дополнительных магнитов штоков 2, магнитов роторов 3 и дополнительных магнитов роторов 5 преимущественно должны быть направлены вдоль радиусов, т.е. направлены к оси или от оси вращения роторов в плоскости, перпендикулярной этой оси.
На Фиг.5 показан один из роторов 6 с магнитами ротора 3 и дополнительными магнитами ротора 5, имеющий возможность вращения относительно неподвижного корпуса 7. Внутренняя часть ротора 6 выполнена с возможностью сдвига вдоль оси вращения, посредством толкателя 8, соединенного с внутренней частью ротора 6 посредством опорного подшипника 9. На внутренней части ротора 6 количество рядов магнитов 3 в осевом направлении на один больше, чем на внешней части. Это необходимо для того, чтобы при сдвиге внутренней части ротора 6 вниз на расстояние высоты магнита ротора 3 и межполюсного промежутка в осевом направлении, магнитное поле от магнитов ротора 3 в области нахождения магнитов штоков 1 и 2 было близким к нулю.
На Фиг.6 крупно показан вырез внутренней части ротора 6 с магнитами ротора 3 и дополнительными магнитами ротора 5, магниты 3 внешней части ротора 6 и дополнительные магниты внешней части ротора 6. Для наглядности внешняя часть ротора 6 не показана, а часть штоков 4 с магнитами штоков 1 и дополнительными магнитами штоков 2 показаны. Буквами S и N обозначены полюса магнитов. Направление намагниченности чередуется в направлении оси вращения, вектор намагниченности в каждой точке магнитов параллелен радиусу в этой точке (радиальная намагниченность).
Для пуска преобразователя желательно придать ротору 4 начальное вращение в необходимом направлении, на тот случай, если штоки 3 находятся в мертвых точках и направление движения ротора 4 при начале их движения не определено.
На Фиг.7 показана часть двигателя с преобразователем: соединение наружных поршней 10 с тягами 11 и одним из штоков 4, а также соединение внутренних поршней 10 между собой соединителем поршней 12 и с другим штоком 4. Для наглядности цилиндрическая часть штоков 4 не показана. При работе двигателя тяги 11 должны быть изготовлены из материала, имеющего высокую прочность на растяжение, так как тяги 11 испытывают в основном нагрузки растяжения при поочередной работе цилиндров.
На Фиг.8 показана часть двигателя с преобразователем в продолжение Фиг.7, также показаны цилиндрические части штоков 4, двигающиеся по направляющей скольжения 13. Направляющая скольжения 13 при работе не испытывает существенных нагрузок от штоков 4 и может изготавливаться, например, из графита или фторопласта.
На Фиг.9 показана часть двигателя с преобразователем: видна связь одного штока 4 с тягами 11 и другого штока 4 с соединителем внутренних поршней 12. Для повышения частоты и мощности двигателя штоки 4, тяги 11, и соединитель внутренних поршней 12 должны быть максимально облегчены, и могут быть изготовлены, например, из углекомпозита.
На Фиг.10 показана часть двигателя с преобразователем: цилиндры 14 с впускными 15 и выпускными 16 продувочными окнами. Нижняя часть корпуса 7 и цилиндрические части штоков с направляющими не показаны. Стрелки указывают направления вращения роторов 6.
На Фиг.11 показан общий вид двигателя с преобразователем: показаны ограничители хода поршней 17, подшипники роторов 18, выпускные коллекторы 19 и впускной коллектор 20. Впускной коллектор 20 объединяет впускные окна 15, посредством патрубка внутри направляющей скольжения 13 (на Фиг. 11 не видны). Таким образом, поступление воздушно-топливной смеси можно осуществлять только с одной стороны двигателя. Это важно для двигателя в авиационном исполнении, представленном на Фиг.12: показан обтекатель 21 и лопасти 22 установленные непосредственно на роторах 6. Впускной и выпускной коллекторы не показаны. Закрепление к крылу или носовой части летательного аппарата производится к корпусу 7. Наличие противоположно-вращающихся лопастей может быть использовано в летательных аппаратах вертикального взлета, например, дронах, вертолетах, летающих автомобилях.
Двигатель в автомобильном исполнении показан на Фиг. 13: непосредственно на одном из роторов 6 установлен обод колеса 23.
Высокая эффективность работы всей магнитной системы достигается при минимальных воздушных зазорах. Все магнитные потоки, не проходящие через зазоры, должны быть по возможности замкнуты магнитопроводами. Замыкание потоков может происходить через штоки 4 и ротор 6, изготовленные из материалов с высокой магнитной проницаемостью.
Предложенный преобразователь может также работать в режиме преобразования вращательного движения в возвратно-поступательное движение, например, для привода насоса. Сущность работы при этом не меняется, передача энергии от вращающегося ротора 6 к движущемуся возвратно-поступательному штоку 4 происходит благодаря взаимодействию магнитов роторов 3, 5 и магнитов штоков 1, 2. Это используется также при запуске двигателя внешним двигателем (стартером) либо другим способом вращения ротора 6 внешней силой.
В режиме пуска роторы 6 раскручиваются внешней силой, поршни 10 сжимают воздух в цилиндрах 14, в которые подается топливовоздушная смесь. При самовоспламенении топливовоздушной смеси поршни 10 начинают двигаться в противоположных направлениях, двигая штоки 4 и вращая роторы 6 благодаря магнитному взаимодействию магнитов штоков 1 и магнитов роторов 3, а также дополнительных магнитов штоков 2 и дополнительных магнитов роторов 5 при их наличии.
Регулировка мощности двигателя производится регулировкой количества топливной смеси, подаваемой в цилиндры 14 через впускной коллектор 20. Можно также реализовать двигатель с непосредственным впрыском в цилиндры 14. Тогда через впускной коллектор 20 подается воздух, а топливо впрыскивается форсунками непосредственно в цилиндры 14.
Предотвращение ударов поршней 10 друг об друга происходит благодаря сопротивлению сжатого воздуха в цилиндрах 14. Поверхность поршней 10 при высоких степенях сжатия должна быть плоской.
Двигатель может быть выполнен на подшипниках 18 из керамики без смазки и с воздушным охлаждением. Это возможно благодаря тому, что вектор вращающего момента параллелен оси цилиндра 14, и поршень 10 не создает боковой нагрузки на стенку цилиндра 14, а также благодаря возможности использовать высокие степени сжатия, обеспечивающие высокий термический КПД и относительно низкую температуру выхлопных газов.
Генераторная установка с применением двигателя с предлагаемым преобразователем может содержать обмотки возбуждения на роторах 6 или постоянные магниты возбуждения, или использовать для возбуждения магниты ротора 3, выведенные полюсами на внешнюю или внутреннюю части роторов 6. При этом статор генераторной установки должен соответственно охватывать внешнюю часть роторов 6 или находиться внутри внутренней части роторов 6.
Наилучшим вариантом выполнения преобразователя возвратно-поступательного движения во вращательное движение, является Модификация, т.к. магнитная сила взаимодействия при тех же габаритах преобразователя выше. Наилучшим вариантом двигателя будет двигатель на основе этого варианта преобразователя, наилучшим вариантом генераторной установки – генераторная установка на основе этого варианта преобразователя, а наилучший вариант транспортного средства – на базе наилучшего варианта двигателя и/или генераторной установки.
Внутренние части двигателя с преобразователями по Модификации представлены на Фиг. 4-11.
Двигатель по Модификации был подвергнут численному расчету на компьютере по методике [7], показавшему, что при внешнем диаметре роторов 6, равном 150 мм, ходе штока 4, равном 30 мм, и диаметре поршней 41.5 мм, максимальная мощность составит 12 л.с. при частоте колебаний поршней около 8400 в минуту. Длина двигателя при этом составила около 500 мм. Такие габариты и мощность подходят для небольшого транспортного средства или генераторной установки. Мощность при необходимости может быть изменена путем изменения размеров магнитов и/или количества магнитов в радиальном или осевом направлении с одновременным изменением диаметра цилиндров. Наращивание количества магнитов штоков 1 и магнитов роторов 3 в радиальном направлении сопровождается соответствующим увеличением количества цилиндрических концентрических рабочих поверхностей.
Библиографический список
- Сухаревский В.В. Двухтактный двигатель внутреннего сгорания с магнитным преобразованием движения // Современные научные исследования и инновации. 2016. № 11 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2016/11/74548 (дата обращения: 08.06.2018).
- Международная патентная заявка PCT. Sukharevskiy Vladimir Vladimirovich. TWO-STROKE INTERNAL COMBUSTION ENGINE HAVING MAGNETIC MOTION CONVERSING. WO2018088925 (A1) опубликована 17.05.2018 с датой приоритета 14.11.2016.
- Сухаревский В.В. Преобразователь возвратно-поступательного движения во вращательное и двухцилиндровый двигатель на его основе // Современные научные исследования и инновации. 2014. № 10. Ч. 1 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2014/10/39944 (дата обращения: 08.06.2018).
- Международная патентная заявка PCT. Sukharevskiy Vladimir Vladimirovich. CONVERTER, TWO-CYLINDER ENGINE AND VEHICLE. WO2016068744 (A1) опубликована 06.05.2016 с датой приоритета 29.10.2014.
- Сухаревский В.В. Модель преобразователя возвратно-поступательного движения во вращательное // Современные научные исследования и инновации. 2014. № 7 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2014/07/36455 (дата обращения: 07.06.2018).
- Международная патентная заявка PCT. Sukharevskiy Vladimir Vladimirovich. CONVERTER FOR CONVERTING RECIPROCATION MOTION TO ROTATIONAL MOTION, MOTOR AND VEHICLE. WO2016003305 (A1) опубликована 07.01.2016 с датой приоритета 30.06.2014.
- Сухаревский В.В. Кинематика и динамика двигателя внутреннего сгорания с магнитным преобразователем возвратно-поступательного движения во вращательное // Современные научные исследования и инновации. 2016. № 2 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2016/02/64331 (дата обращения: 07.06.2018).
Количество просмотров публикации: Please wait
Все статьи автора «Сухаревский Владимир Владимирович»
Как правильно чистить зубы — ОГАУЗ «Стоматологическая поликлиника №1»
Как правильно чистить зубы
Гигиена полости рта — профилактика болезней зубов
В настоящее время известен большой перечень факторов риска развития заболеваний зубов и полости рта. Среди этих факторов – неблагоприятная экологическая ситуация, режим жизни, стрессы, характер питания. Большое значение в развитии заболеваний зубов и полости рта имеют индивидуальные особенности организма, состояние иммунитета, семейная предрасположенность.
Эксперты Всемирной Организации Здравоохранения наметили основные направления профилактики болезней зубов и полости рта. Это рациональное питание, гигиена полости рта и применение препаратов фтора.
В рациональном питании для стоматологов наиболее важна коррекция количества принимаемых углеводов. Пища, содержащая большое количество углеводов оказывает отрицательное воздействие не только на зубы, но и на организм в целом. Это не значит, что от углеводов нужно отказаться. Необходимо снизить их потребление до оптимального уровня. Сбалансированное питание, богатое витаминами, минералами и микроэлементами также обеспечивает профилактику кариозной болезни зубов. Важнейшая роль в профилактике заболеваний зубов и полости рта всегда отводилась гигиене. Уже во II-III тысячелетии до нашей эры были описаны рецепты приготовления отваров и эликсиров для полоскания полости рта в гигиенических и лечебных целях. В Древнем Китае и Индии для чистки зубов применялись деревянные палочки, а также прообразы современных зубных щеток.
Нет сомнений в том, что самая важная роль в развитии кариозного поражения зубов принадлежит плохой гигиене ротовой полости. Образование налета на зубах с последующим образованием микробной бляшки дает начало кариозной болезни зубов. Поэтому для хорошего стоматолога так важно научить пациента правильно чистить зубы. Большинство людей, регулярно ухаживающих за зубами, обнаруживают недостаточный уровень знаний о средствах и методах ухода за полостью рта. По данным статистики только 10% людей правильно чистят зубы.
Как правильно чистить зубы
Поддержание полости рта в хорошем гигиеническом состоянии возможно лишь при тщательной чистке зубов, основанной на следующих принципах:
• чистка зубов должна быть регулярной с необходимым для очищения всех зубных поверхностей количеством движений щетки;
• обучение правилам чистки зубов входит в обязанности стоматолога, без обучения невозможно обеспечить необходимый уровень гигиены полости рта;
• уровень гигиены полости рта должен контролировать стоматолог.
Чистка зубов состоит из ряда простых элементов, удобных для запоминания и воспроизведения. Существует много различных методов чистки зубов, различающихся между собой характером движений, их последовательностью, порядком очищения зубных поверхностей и др.
Стандартная методика чистки зубов включает ряд основных движений щеткой, которые очищают различные поверхности зубов. Предварительно необходимо вымыть руки. Затем полость рта необходимо прополоскать водой. Зубную щетку тщательно промывают водой. Пасту наносят на всю длину поверхности щетины. Чистить зубы надо по определенной схеме, чтобы добиться более полного очищения. После чистки полость рта снова нужно прополоскать водой для удаления избытка пасты, зубную щетку тщательно промывают и ставят в стакан.
Самый сложный элемент – непосредственная чистка зубов. Ее можно разделить на несколько типовых движений щеткой для очищения тех или иных зубных поверхностей. Различают скребущие, круговые, подметающие (выметающие) и возвратно-поступательные движения щеткой. Скребущие движения состоят в продвижении щетинного поля щетки вдоль ее длинной оси с нажимом на головку. Возвратно-поступательные движения выполняют аналогично скребущим, но в обоих направлениях (вперед и назад), постепенно передвигая щетку на новые участки зубов. Подметающие движения делают по короткой оси щетиночного поля в направлении щетки от десны к жевательной поверхности зубов. При этом нажим щеткой осуществляют дифференцированно в области зубной поверхности и десны. Круговые движения совмещают с постоянным передвижением щетки на следующий фрагмент зубного ряда.
Жевательные поверхности зубов очищают с помощью скребущих и возвратно-поступательных движений. Небные и язычные поверхности фронтальных зубов очищаются также скребущими движениями. Вестибулярные, небные и язычные поверхности жевательных зубов обеих челюстей очищают вначале подметающими движениями, которые затем дополняют возвратно-поступательными и заканчиваются круговыми. Губные поверхности фронтальных зубов очищаются подметающими и скребущими движениями.
Наиболее распространенной ошибкой при чистке зубов является выполнение щеткой различных движений – возвратно-поступательных, скребущих, поперек оси зубов. Это приводит к переносу зубных отложений с одного участка зубного ряда на другой, а также к загрязнению ими межзубных промежутков.
Чистить зубы обеих челюстей целесообразно по определенной схеме. Например, каждую челюсть делят на шесть фрагментов — по два фронтальных (резцы и клыки), премоляры и моляры справа и слева. Чистку можно начать с вестибулярной стороны моляров справа и слева на верхней челюсти и продолжить до противоположной стороны, затем следует очистить жевательные поверхности зубов и в завершение небную поверхность. Затем в той же последовательности производят чистку зубов нижней челюсти. Каждую поверхность зубов каждого фрагмента челюсти необходимо очищать не менее чем 10 движениями щетки, что в сумме составит 160 движений на каждую челюсть. Следовательно, для очистки обеих челюстей необходимо произвести 320 движений щеткой. Время чистки зубов должно составлять в среднем 2,5 — 3,5 мин.
Чистить зубы целесообразно дважды в день — утром и вечером. Вечером перед сном чистить зубы необходимо. Однако большинство людей выполняют эту процедуру однократно, чаще всего утром после сна. Нужно знать, что даже интенсивная чистка зубов не обеспечивает удаления зубных отложений с контактных поверхностей и из фиссур. Для очистки межзубных промежутков и контактных поверхностей пользуются зубочистками, флоссами, нитями. Для очистки контактных поверхностей зубов от налета нить длиной 35 — 40 см закручивают вокруг первых фаланг средних пальцев обеих рук. Затем ее фиксируют между большим пальцем правой руки и указательным — левой в области десневой бороздки дистальной поверхности зуба верхней челюсти. При натягивании нити с помощью 6 — 7 движений назад, вперед и вверх удаляют зубные отложения с указанной поверхности. Затем таким же образом осторожными движениями вперед и назад нить через контактный пункт передвигают на медиальную поверхность этого зуба, стараясь не повредить десневой сосочек. После этого нить плотно прижимают к очищаемой контактной поверхности и, делая движения нитью, удаляют зубной налет. После этого через межзубный сосочек нить передвигают к дистальной поверхности соседнего зуба и очищают ее аналогичным способом. Необходимо помнить: нить должна всегда находиться в контакте с поверхностью зуба, чтобы не вызвать повреждения сосочка и десны; ее не следует передвигать с большим усилием. Указанная манипуляция является сравнительно трудной и требует значительных усилий для освоения. Вместе с тем это единственный эффективный метод гигиены контактных поверхностей зубов.
Элементарные правила по уходу за зубами
В настоящее время 95% населения страдает от заболевания пародонта. К ним относятся гингивит, пародонтит и кариес. Это говорит о том, что большинство людей не умеют правильно чистить зубы.
Начинаем чистить зубки
Большинство родителей часто задают вопрос, когда нужно начинать чистить зубы детям? Ответ простой — сразу же, как только они прорезались. Сначала это делаем с помощью кусочка марли смоченной кипяченной водой, затем специальными щетками для детей. Чистить зубы ребенок должен 2 раза в день с использованием детской пасты (например ROCS Baby).
Как правильно чистить зубы
Зубной ряд условно делят на сегменты (6 сегментов на каждой челюсти). Чистку зубов нужно начинать с участка в области верхних правых жевательных зубов, последовательно переходя от сегмента к сегменту на левую сторону. Чистка нижней челюсти проводится аналогично верхней.
При чистке зубов рекомендуется использовать подметающие и возвратно-поступательные движения. Подметающие движения хорошо очищают щечные, небные, язычные и вестибулярные поверхности зубов. Возвратно-поступательные движения очищают от налета и остатков пищи жевательные поверхности моляров и премоляров.
При подметающих движениях рабочую часть зубной щетки нужно располагать под углом 45° к зубу и совершать очищающие движения от десны к зубу. При возвратно-поступательных движениях рабочую часть щетки располагают перпендикулярно по отношению к жевательной поверхности зубов и совершают движения вперед-назад. Каждую поверхность зуба надо очищать десятью движениями щетки.
Процедуру чистки зубов нужно начинать и заканчивать полосканием рта водой и промыванием зубной щетки.
Как выбрать зубную щетку
Во-первых, различают щетки по жесткости щетины:
- Жесткие (hard) — рекомендуются лицам со здоровыми тканями
- Средней жесткости (medium) — советуют использовать детям старше 12 лет и взрослым
- Мягкие (soft) – рекомендуется детям от 5 до 12 лет и людям с кровоточивостью десен
- Очень мягкие (extra soft) — рекомендуется детям от года до 5 лет
Второе, на что стоить обратить внимание, это щетина. Щетина бывает натуральная и искусственная. Уже доказано, что натуральная хуже, т.к этот вид щетины быстро покидает свою ячейку в головке щетки. Искусственная же щетина не расслаивается и не покидает своего места, в них реже заводятся микробы.
Щетина должна быть аккуратно подстрижена. Щетки с двухуровневой щетиной лучше очищают межзубные промежутки, именно в этих участках чаще всего развивается кариес. Форму щетки лучше выбирать округлой, для того чтобы не повредить слизистую оболочку рта.
В третьих, следует обратить внимание на конструкцию щетки. Расположенные резиновые панельки препятствуют скольжение в руках, тем самым, предупреждая травмы десен. Уменьшению давления на десны способствует изгиб щетки — «змейка» или «шарик», находящейся недалеко от чистящей поверхности.
Какими бывают зубные пасты
Все пасты делятся на две большие группы: гигиенические и лечебно-профилактические.
Первая группа предназначена только для очищения зубов от налета, а также придания полости рта приятного запаха. Такие пасты рекомендуются обычно тем, кто имеет здоровые зубы.
Основная масса зубных паст относится ко второй группе — лечебно-профилактической. Их предназначением, помимо очищения поверхности зубов, является подавление микрофлоры, вызывающей кариес и пародонтит, реминерализация зубной эмали, уменьшение воспалительных явлений при заболеваниях пародонта, а также отбеливание зубной эмали.
Выделяют противокариозные пасты, включающие в себя кальцийсодержащие и фторсодержащие зубные пасты; зубные пасты с противовоспалительным действием («лесная», «colgate лесные травы») и другие отбеливающие пасты.
Противокариозный эффект обеспечивается присутствием в зубной пасте фторидов (фторид натрия, фторид олова, аминофторид), а также присутствием кальция (глицерофосфат кальция). Все эти вещества эффективны только в тех случаях, когда процесс очищения зубов длится больше 5-ти минут.
Противовоспалительное действие обычно достигается добавлением в зубную пасту экстрактов трав (мята, шалфей, ромашка и др.)
Отбеливающие пасты содержат бикарбонат натрия или соду, которая обладает выраженным абразивным действием. Применять такие пасты ежедневно не рекомендуется, вследствие риска повреждения эмали. Рекомендуют их применять 1-2 раза в неделю.
Зубные пасты следует чередовать. Так, при склонности к кариесу и пародонтиту следует применять утром противокариозную пасту, а вечером противовоспалительную. Важно при этом соблюдать правильную технику чистки зубов.
Жвательная резинка: жевать или не жевать?
Жевательная резинка – средство, позволяющее улучшить гигиеническое состояние полости рта. Жвачка проявляет свое воздействие на ткани полости рта следующими способами:
- способствует нейтрализации кислот зубного налета;
- увеличивает скорость слюноотделения, тем самым омывает полость рта труднодоступные участки полости рта;
- способствует удалению остатков пищи.
Рекомендации по использованию:
- применять жевательную резинку, без сахара;
- пользоваться жевательной резинкой после каждого приема пищи и сладостей;
- использовать жевательную резинку не более 10 мин после приема пищи.
Обратите внимание! В нашем стоматологии вы можете приобрести эксклюзивные средства по уходу за полостью рта (зубные щетки, зубные пасты, гели и т.д)
Не болейте! 😉
Как работает возвратно-поступательное движение в промышленном производственном оборудовании
Производственное оборудование, предназначенное для возвратно-поступательного движения, требует встроенного линейного привода в сборе для перемещения головки инструмента вперед и назад. К приложениям возвратно-поступательного движения относятся: покраска, шлифование, продольная резка, сканирование, намотка, надрезание, напыление — практически любая задача, где требуется возвратно-поступательное движение инструмента, камеры, режущего лезвия или другого устройства.
Говоря о возвратно-поступательном движении, инженеры обычно имеют в виду повторяющееся возвратно-поступательное движение на фиксированном расстоянии.Пример — намоточная машина. Возвратно-поступательный линейный привод используется для направления проволоки или другого наматываемого материала вперед и назад во время намотки. Возвратно-поступательное движение может также включать остановки и пуски, а также различную длину хода. Хотя это чаще называют индексацией или позиционированием.
Примеры приводов возвратно-поступательного движения. В поршневых линейных приводах
используется широкий спектр технологий. Традиционный набор систем привода возвратно-поступательного движения включает винты, гидравлические системы, зубчатые ремни, пневматические узлы и другие.Все эти устройства предъявляют значительные и сложные требования к техническому обслуживанию и чаще всего требуют технического обучения оператора.
Традиционные системы возвратно-поступательного движения, подобные упомянутым выше, могут вызывать нежелательные простои в результате выполнения текущих задач технического обслуживания. Такие задачи, как переключение передач, замена погнутых поршневых штоков, замена негерметичных уплотнений и другие процедуры ремонта и технического обслуживания. Кроме того, в высокопроизводительных системах возвратно-поступательного движения, включающих датчики и программирование, для ремонта могут потребоваться услуги специалистов по электронике и ПЛК.
Для автоматизации возвратно-поступательного движения в машинах почти всегда требуются многоскоростные реверсивные двигатели с прямым торможением; датчики; клапаны и соленоиды; агрегаты зубчатой передачи; ПЛК и другие полезные и инновационные устройства. Независимо от того, проектируете ли вы, эксплуатируете или обслуживаете этот тип оборудования, вы, вероятно, знакомы с этими компонентами. Проектирование различных типов узлов поршневых линейных приводов является рутинным для проектировщика. И клиенты, покупающие машину, обычно принимают затраты на обучение операторов и техников по техническому обслуживанию как часть общих инвестиций.
Но обычный подход к системам возвратно-поступательного движения может сделать проектирование машин излишне дорогим и сложным. Это также увеличивает расходы на эксплуатацию и техническое обслуживание. Возьмем, к примеру, автоматизированный процесс окраски распылением. Разработчик машины может разработать сложную электронную систему управления для обеспечения возвратно-поступательного движения распылительной головки вперед и назад. После того, как время и деньги будут потрачены на проектирование системы и компоненты, электронное управление обычно требует дополнительных инвестиций в форме обучения операторов.Когда требуемое возвратно-поступательное движение является основным, например, в простой системе распыления, поиск альтернативных методов возвратно-поступательного движения может упростить конструкцию машины и сделать ее менее затратной.
Возвратно-поступательный линейный привод с роликовым кольцом является одной из таких альтернатив. Приводы с роликовыми кольцами — это механические решения для возвратно-поступательного движения. Возвратно-поступательный привод линейного перемещения Amacoil / Uhing обеспечивает автоматическое управление возвратно-поступательным движением без сложных элементов управления, компонентов и программирования.Возвратно-поступательное движение Amacoil / Uhing не имеет люфта, и единственное, что необходимо для обслуживания, — это периодическая легкая смазка приводного вала.
Система возвратно-поступательного движения с роликовым кольцом по сравнению с винтовой системой.
Если винт используется в системе возвратно-поступательного движения, необходимо соблюдать осторожность, чтобы не допустить попадания прямых частиц и мусора в резьбу винта. В противном случае, если что-то забивает резьбу винта, система будет взбивать и измельчать, что может повредить дорогие компоненты системы.Сильфон в сборе часто используется для защиты резьбы.
В возвратно-поступательном приводе качения кольца нет резьбы. Вал гладкий, поэтому грязь и мусор не скапливаются. Это означает отсутствие засорения или заклинивания — и нет необходимости останавливать систему для очистки вала. В системах возвратно-поступательного движения обычно используются муфты, кулачки и шестерни для управления реверсированием приводной головки. Кроме того, может потребоваться замедлить или остановить приводной двигатель, прежде чем можно будет изменить направление движения приводной головки.
Привод возвратно-поступательного движения с концевыми упорами, регулируемыми вручную.
В системе возвратно-поступательного движения Amacoil / Uhing автоматическое мгновенное реверсирование приводной головки управляется механически независимо от скорости приводного двигателя и направления вращения. Это избавляет от необходимости использовать муфты, кулачки или шестерни. Здесь нет ни программирования, ни дорогостоящих двигателей и контроллеров. Датчики и датчики приближения не требуются. Направление движения контролируется регулируемыми концевыми упорами.
Возвратно-поступательное движение упрощается системой привода с роликовым кольцом.Чтобы обеспечить возвратно-поступательное движение, установка прокатных колец Amacoil / Uhing работает на основе базовой инженерной технологии, которая используется пчелами более 70 лет. Подшипники с роликовыми кольцами специально обработаны таким образом, чтобы при вращении вала сжатие и трение подшипников о вал преобразовывали входное вращательное движение в линейное выходное без люфта. Регулируемый пользователем угол подшипникового узла относительно вала используется для управления линейным шагом и направлением движения приводной головки. Все это делается полностью без сложных электронных средств управления.
Не принимаем «обычные» простои и дополнительные расходы, связанные с эксплуатацией и обслуживанием систем возвратно-поступательного движения в производственном оборудовании. Узлы линейного привода качения Amacoil позволяют механически управлять скоростью и направлением перемещения инструментальной головки независимо от двигателя. Это упрощает конструкцию машины и снижает затраты на эксплуатацию и техническое обслуживание.
Оптимизация возвратно-поступательного движения | Конструкция машин
Подумайте о возвратно-поступательном движении, и на ум могут прийти кулачки — короли кинематических связей.Не зря: кулачки были традиционным золотым стандартом возвратно-поступательного движения с самого начала индустриализации. Даже сегодня современные разновидности (разработанные с программным обеспечением для сложных кривых скорости и ускорения движения) могут опередить гидравлические и электрические системы по времени отклика. Фактически, когда приемлема фиксированная система, кулачки могут быть лучшим способом максимизировать количество циклов.
«Исторически возвратно-поступательное движение создавалось вращающимися устройствами (паровыми или бензиновыми двигателями и электродвигателями), вращающими кривошип или кулачок, или косвенно путем вращения вала», — объясняет Фил Холлингсворт, технический директор компании California Linear Devices, Карлсбад. КалифорнияОднако, как он указывает: «В этих механических системах возвратно-поступательное движение по необходимости повторяется в своем профиле движения, повторяясь один раз за цикл. Регулировка профиля движения может занять очень много времени и денег. А из-за инерции такой системы изменение скорости обычно может быть достигнуто только в течение нескольких циклов ».
Таким образом, если системе необходимо выполнять различные функции в течение ее срока службы, более подходящими являются системы с электронной регулировкой. Электронный кулачок Выход, как и в случае с механическими кулачками, является функцией некоторого измеренного положения.Однако движение осуществляется синхронизированными двигателями, управляемыми (перепрограммируемыми) контроллерами — подход, свободный от проблем износа и негибкости механических типов.
«С электронными сервоприводами профили движения могут изменяться в каждом цикле в зависимости от входных данных, поступающих от машины», — добавляет Холлингсворт. Программируемые профили управления движением позволяют изменять длину хода, скорость, ускорение и время задержки для каждого хода или время от времени изменять по мере необходимости — очень универсально.«Переключение продукта может быть таким же простым, как указание контроллеру использовать различные запрограммированные параметры».
Прямое движение
В поршневых приложениях, где требуется максимальная скорость отклика, приводы с линейным двигателем генерируют тяговую мощность без создающих инерцию ходовых винтов, шестерен, муфт или приводных двигателей. В результате низкая инерция в сочетании с высокими движущими силами обеспечивает ускорение и скорость, по крайней мере, в два раза превышающие ширину полосы по сравнению с альтернативными позиционерами. Это означает, что они превосходны в приложениях, включающих повторяющееся движение на короткие расстояния, прямое и обратное движение.«И это не грубое возвратно-поступательное движение — позиционирование нагрузки привода находится под постоянным контролем обратной связи для воспроизводимости с точностью до нескольких микрон», — говорит Стэн Фрауд из Copley Controls Corp., Кантон, Массачусетс.
«Некоторые линейные двигатели очень отзывчивы, — соглашается Холлингсворт, — обладают высокой пропускной способностью, выраженной в очень высоких скоростях ускорения с изогнутыми профилями движения S ». Этот тип профиля может быть использован для увеличения производительности машины, не тряся деталей.
«Эти кривые движения S отличаются от профилей трапециевидного движения, которые имеют постоянное ускорение и замедление и создают неровности при трогании с места и остановке», — говорит Джим Вудворд, менеджер приложений в Copley Controls Corp. рывок и представляет собой скорость изменения ускорения.) При трапециевидных движениях рывок теоретически бесконечен, поскольку ускорение и замедление начинаются мгновенно и остаются постоянными. «В отличие от этого, кривые S увеличивают ускорение / замедление, управляя рывками и производя программно плавный пуск и остановку.Они отлично подходят для устранения шума, износа оборудования и работы с хрупкими деталями, которые могут упасть с оборудования при слишком быстром запуске или остановке », — добавляет Вудворд.
Прекращение программирования
С другой стороны, для многих процессов возвратно-поступательного линейного движения — продольной резки, перемещения, нанесения покрытия, распыления — механические конструкции, такие как системы приводов с роликовыми кольцами, устраняют необходимость в программировании и электронике. Как? «Приводы с роликовыми кольцами — это устройства с механическим управлением, поэтому направление и скорость движения не зависят от скорости приводного двигателя или направления вращения.В результате процесс двунаправленного линейного движения с регулируемой скоростью может быть выполнен с использованием относительно недорогого однонаправленного двигателя с простым переключателем включения / выключения », — объясняет Боб Эйселе из Amacoil, Inc., Астон, Пенсильвания.
Внутреннее кольцо подшипника качения обработано так, чтобы образовать своего рода гребень, вершина которого остается в постоянном точечном контакте с приводным валом даже во время реверсирования. Это исключает люфт при поступательном движении. Поворот подшипников слева направо в конце каждого хода приводит к изменению направления приводной гайки без необходимости изменения направления вращения вала или двигателя.В приложениях с повторяющимся возвратно-поступательным линейным перемещением (когда сопло, направляющая или другой инструмент перемещаются посредством ходов) это устраняет необходимость в электронной системе управления и, следовательно, упрощает работу.
Для получения дополнительной информации войдите на amacoil.com , calinear.com , copleycontrols.com или отправьте электронное письмо редактору Элизабет Эйтель по адресу [email protected].
Примеры возвратно-поступательного движения
Двумя распространенными примерами возвратно-поступательного движения являются отклонители конвейера и летающие матрицы.
На отклонителях конвейеров приводы с плавным реверсированием быстро перемещают пакеты с одного конвейера на другой, не повреждая и не бросая их неконтролируемым образом. «Плавное и точное движение позволяет конвейерам работать на более высоких скоростях», — говорит Холлингсворт.
На летающих штампах приводы ускоряют штампы — например, до скорости линии экструзии винилового сайдинга. Затем штамп может отрезать сайдинг до точной длины на более высоких скоростях, чем позволяют другие технологии.
«Иногда, однако, возвратно-поступательное движение может означать фиксированный ход без возможности регулировки расстояния», — говорит Фрауд. «С другой стороны, приложения для захвата и размещения включают возвратно-поступательное движение с переменной длиной хода под управлением компьютера при каждом движении. Так что в этом смысле некоторые приводы могут быть слишком сложными для использования в более простом возвратно-поступательном движении ». Здесь возвратно-поступательное движение лучше всего достигается с помощью простого вращающегося двигателя, приводящего в движение коленчатый вал, который, в свою очередь, производит возвратно-поступательное движение на фиксированном расстоянии.
Другие примеры возвратно-поступательного движения включают поршневые насосы и компрессоры, роликовые системы давления и натяжения, устройства для испытания материалов и установочные машины.
Люфт
Люфт — особенно вредное последствие возвратно-поступательных систем. Он вызывает удары по нагрузкам и исполнительным механизмам, повреждая продукт и ограничивая срок службы оборудования. «Чтобы свести к минимуму этот эффект, движение часто замедляется, что, в свою очередь, снижает производительность всей машины и ее производительности», — говорит Холлингсворт.«Напротив, линейные двигатели с прямым приводом по своей природе не имеют люфта», — добавляет он. Движущийся элемент соединяется непосредственно с неподвижным элементом через относительно жесткое магнитное поле, и весь механизм может быть запрограммирован на очень плавный запуск и остановку — так же, как движение кулачка, но без ограничений, связанных с отрывом толкателя. Плавный пуск и остановка также продлевают срок службы машины и щадят транспортируемые грузы.
Четыре типа движения
В мире механики существует четыре основных типа движения.
Эти четыре типа:
- Линейный.
- Возвратно-поступательный.
- Поворотный.
- Колеблющийся.
Каждый из них движется немного по-своему, кроме того, каждый тип движения достигается с помощью различных механических средств. Давайте рассмотрим каждый тип движения, чтобы помочь нам понять каждый из них с точки зрения механики и что это означает для достижения каждого движения.
Линейное движение
Линейное движение определяется как устройство, которое движется по прямой линии, но иногда его можно назвать поступательным движением.Линейные актуаторы Фирджелли — классический пример линейного движения. Однако интересная часть электромеханических приводов линейного движения заключается в том, что прямолинейное движение на самом деле происходит от вращательного движения, которое мы объясним далее. В линейных приводах они используют двигатели переменного или постоянного тока для создания вращательного движения, которое через ходовой винт преобразуется в линейное движение.
Вращательное движение
В вращательном движении или вращательном движении это относится ко всему, что движется по кругу, и далее определяется как круговое движение объекта вокруг центра (или точки) вращения.Вращательное движение, пожалуй, самый распространенный и важный тип движения, а также наиболее широко используемый во всех сферах нашей повседневной жизни. От двигателей до вентиляторов и самолетов, вы называете это, и почти все имеет ту или иную форму вращательного движения.
Как создать вращательное движение?
Наиболее распространенный способ создания вращательного движения — использование двигателей. Это могут быть электрические двигатели переменного или постоянного тока, но также могут быть двигатели внутреннего сгорания, конечным результатом которых является вращение колес автомобиля.Интересно, однако, что в двигателе внутреннего сгорания первоначальная форма движения на самом деле линейна. В цилиндрах двигателя для воспламенения используются воздух и топливо, которые затем взрываются и заставляют поршень двигаться линейно, а затем поршень соединяется с коленчатым валом для создания вращательного движения. Таким образом, в этом случае возвратно-поступательное движение используется для создания вращательного движения. Земля также вращается вокруг своей оси северного и южного полюсов каждые 24 часа.
Возвратно-поступательное движение
Возвратно-поступательное движение, также называемое возвратно-поступательным движением, представляет собой повторяющееся возвратно-поступательное движение.Он присутствует в широком спектре механизмов, включая двигатели внутреннего сгорания, как упоминалось выше, где он используется для создания вращательного движения. Этот тип движения может приводиться в действие с любого конца механизма, такого как конец линейного движения, который используется в двигателе внутреннего сгорания, который затем преобразуется во вращательное движение. Но его также можно приводить в действие с вращающегося конца, где желаемым выходом является линейное движение.
Колебательное движение
Колебательное движение определяется как движение объекта вперед и назад от его среднего положения.Когда вы описываете механические колебания, используется термин «вибрация», который встречается в движении маятникового типа.
Тип колебательного движения
- Маятник часов
- Качели для детской площадки
- Квантовый гармонический осциллятор
- Спринклерная система
Типы движения
Исаак Ньютон определил 3 закона движения, которые относятся к тому, как объект ведет себя на Земле;
- Инерция — Покоящийся объект будет оставаться в покое, если на него не действует неуравновешенная сила.Движущийся объект продолжает движение с той же скоростью и в том же направлении, если на него не действует неуравновешенная сила.
- Ускорение возникает, когда сила действует на массу. Чем больше масса (ускоряемого объекта), тем большее количество силы требуется (для ускорения объекта)
- Реакция — для каждого действия существует равная и противоположная реакция
—— ————————————————— ————————————————
Есть 4 основных типа механического движения;
- ЛИНЕЙНЫЙ — Движение, при котором объект перемещается по прямой линии от начальной точки.1-й закон Ньютона предполагает, что объект будет продолжать движение по прямой, если не будет приложена несбалансированная сила. Такие силы, как сопротивление, гравитация и трение, предотвратят это на Земле.
- ВЗАИМОДЕЙСТВИЕ — Движение, которое вращается вперед и назад в линейном направлении. Это можно сравнить с пильным полотном или пневматической дрелью.
- ВРАЩЕНИЕ — Движение, которое поворачивает объект по полному кругу на 360 ° вокруг и оси, часто многократно. Это движение легко запомнить как колесо или веер.Сила этого движения определяется как крутящий момент, а повторения подсчитываются в оборотах в минуту (об / мин).
- КОЛЕБАНИЕ — Движение представляет собой комбинацию вращательного и возвратно-поступательного движения. Объект смещен от оси и вращается вперед и назад по дуге. Это лучше всего сравнить с качанием маятника
———————————— ————————————————— —————-
Большинство механических систем используют комбинацию из этих 4 движений для создания требуемой силы и известны как «механизмы ». Передача кинетической энергии между каждым типом движения может быть достигнута многими способами;
Использование кулачкового следящего механизма может преобразовать вращательное движение в возвратно-поступательное движение . Кулачок представляет собой закругленный профиль, центральная ось которого смещена на . Толкатель представляет собой прямую деталь, которая помещается на верх кулачка и под действием силы тяжести e поднимается вверх под действием силы тяжести
Расстояние, пройденное толкателем, известно как «броска» каждое вращение известно как «цикл » .Ряд кулачковых профилей может использоваться для достижения различных возвратно-поступательных движений. Они используются в различных механизмах и жизненно важны для автомобильной промышленности для таких компонентов, как коленчатый вал для передачи мощности от двигателя
Форма ведомого элемента может быть изменена для соответствия различным приложениям;
- Режущая кромка Приводной элемент доходит до верхней части кулачка — это самый простой, но склонный к износу и редко используемый
- A Ролик представляет собой вращающийся цилиндр, закрепленный на конце для вращения с кулачковый профиль.Обычно используется, но может заклинивать во время использования
- Толкатели с плоской гранью идеально подходят для быстрой смены направления , но любое смещение может вызвать повышенное напряжение, усталость и трение
- Толкатели со сферической гранью компенсируют это смещение поддержание точного контакта с кулачком, но с аналогичным трением
——————————— ————————————————— ———————
Другой способ передачи движения — использование рычага .Рычаг — это один из самых простых и старых механизмов, который использует неуравновешенное усилие , вращающееся на Fulcrum . С одной стороны от точки опоры находится рычаг усилия , к которому прикладывается динамическая сила . С другой стороны — рычаг сопротивления , к которому прикладывается статическая сила (нагрузка)
> Рычаги класса 1 — они определяются размещением усилий и сил сопротивления, находящихся на противоположных сторонах шарнира как качели.Обычно они неуравновешены , и благодаря расчетному размещению опоры можно использовать для подъема гораздо больших усилий , чем прикладываемые
> Рычаги класса 2 — они определяются путем размещения нагрузки и усилие силы на той же стороне точки опоры. В рычаге этого типа движение нагрузки происходит в направлении , в том же направлении , что и движение усилия. Рычаг усилия должен быть на длиннее на , чем рычаг нагрузки , чтобы иметь преимущество
> Рычаги класса 3 — они определяются путем размещения сил на той же стороне точки опоры, что и усилие рука ближе , чем рука нагрузки .Рычаг нагрузки и усилия доходит до точки опоры, при этом рычаг нагрузки всегда длиннее , чем усилие. Обе силы движутся в направлении в одном направлении
————————————- ————————————————— —————
Классы 1 и 2 увеличивают входную силу, приложенную через «усилие», до выводят гораздо большую силу на нагрузку. Это определяется как «момент» . Чтобы рассчитать момент, вы должны знать величину сил и их расстояние от оси.Уравнение, используемое для расчета каждой силы:
Сила (Ньютон) x Расстояние (метр) = Момент (Нм)
Произошла ошибка при настройке пользовательского файла cookie
Этот сайт использует файлы cookie для повышения производительности. Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера для приема файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно.Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались.
Чтобы принять файлы cookie с этого сайта, используйте кнопку «Назад» и примите файлы cookie. - Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом.Если часы вашего компьютера показывают дату до 1 января 1970 г.,
браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере. - Вы установили приложение, которое отслеживает или блокирует установку файлов cookie.
Вы должны отключить приложение при входе в систему или проконсультироваться с вашим системным администратором.
Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу.Чтобы предоставить доступ без файлов cookie
потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файле cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта.Например, сайт
не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к
остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
Что такое возвратно-поступательное движение? (с изображением)
Возвратно-поступательное движение относится к любому повторяющемуся движению по прямой линии, которое включает вверх и вниз, из стороны в сторону или внутрь и наружу. Это движение может перекачивать воду, приводить в действие механизмы, охлаждать пищу и находить множество других применений.Принцип возвратно-поступательного движения приводит в действие большинство двигателей внутреннего сгорания.
Двигатель, работающий на бензине или дизельном топливе, может обеспечивать мощность за счет воспламенения топлива в воздушной смеси. Энергия сгорания заставляет поршень совершать линейное или прямолинейное движение внутри цилиндра. Шток поршня соединен с приводным валом в положении вне центра, и движение поршня преобразуется во вращательное движение, которое может приводить в действие транспортное средство.Совершая возвратно-поступательное движение вверх и вниз в цилиндре, поршень многократно сжимает топливо, передавая мощность на приводной вал и выбрасывая отработанный газ.
Вращательное движение также можно использовать для создания возвратно-поступательного движения.Реечное рулевое управление во многих автомобилях состоит из круглой шестерни или шестерни, совмещенной с прямым валом с зубчатой передачей. При повороте рулевого колеса шестерня вращается, перемещает вал вперед и назад, а колеса вращаются.
Движение также может быть вверх и вниз.Примером может служить скважинный насос с ручным управлением. Ручка насоса перемещается вверх и вниз, что приводит в действие поршень под землей на конце вала. Каждый раз, когда ручка опускается, поршень поднимается и создает всасывание для забора воды из колодца. Насосы для нефтяных скважин с электрическим приводом используют тот же принцип: роторный электродвигатель приводит в движение качающийся рычаг, который приводит в действие насос.
Некоторые паровые машины 1800-х годов были машинами двойного действия, которые обеспечивали мощность в двух направлениях.Поршень был центрирован в горизонтальном цилиндре, и вал был соединен с обеих сторон поршня с поворотными кулачками. Одна сторона поршня находилась под давлением пара, а другая сторона была удалена, и процесс был обратным. Возвратно-поступательное движение вала было преобразовано во вращательное движение, которое могло приводить в действие механизмы.
Линейное возвратно-поступательное движение можно использовать напрямую, не преобразовывая его во вращательное действие.В ударных молотах и сваях используется возвратно-поступательный поршень, приводимый в действие воздухом или паром. Каждый рабочий ход поршня можно использовать в качестве энергии для привода крепежных элементов или установки фундаментных свай.
Газовые компрессоры могут быть поршневыми.В этих системах вал компрессора приводится в движение газовым или электрическим двигателем, который заставляет поршни двигаться. Многие холодильные компрессоры и промышленные воздушные компрессоры используют поршневые машины, потому что они могут обеспечить большую производительность при заданной потребности в мощности по сравнению с роторным компрессором.
Мембранные насосы — это поршневые машины.Шатун от приводного вала монтируется с одной стороны резиновой или полимерной диафрагмы, которая представляет собой сплошную прокладку. Возвратно-поступательное движение шатуна толкает диафрагму вперед и назад, которая втягивает жидкость и выпускает ее. Мембранные насосы обычно используются для жидкостей, содержащих твердые частицы, такие как грязь или некоторые коррозионные химикаты.
Четыре основных типа движения
Физика охватывает множество тем, но по сути, это изучение того, как вещи движутся.На «макро» уровне (в отношении повседневных и видимых вещей, в отличие от «микро» или атомных и субатомных явлений) многие физики и инженеры классифицируют движение на четыре основных типа: линейное, вращательное, возвратно-поступательное и колебательное. Машины с движущимися частями обладают одним или несколькими из них.
Обратите внимание, что их не следует путать с жесткими законами движения; они приняты во многих конвенциях, но никоим образом не представляют собой железные категории. Например, астрономы часто обсуждают движение с точки зрения вращения, вращения, космического расширения и орбитальных систем.Тем не менее, четыре вида механического движения являются хорошей отправной точкой для изучения того, как вещи переходят из одной точки в другую в физическом пространстве вполне знакомыми способами.
Линейное (поступательное) движение
Линейное движение, иногда более широко называемое поступательным движением, — это просто перемещение объекта из одной точки пространства в другую. Схематично, на типичном графике с осями x и y, если точка перемещается из начала координат в (0, 0) в точку (3, 4), теорема Пифагора может использоваться, чтобы показать, что точка претерпела 5 единиц линейного движения (квадратный корень из 3 2 + 4 2 равен 5).Стрела, выпущенная из лука, совершает прямолинейное движение.
Многие объекты испытывают одновременно более одного типа движения, причем преобладающая форма используется в качестве общего дескриптора. Например, бейсбольный мяч, брошенный от питчера к кэтчеру на расстоянии 60 футов, претерпел поступательное движение, но мяч, вероятно, несколько раз повернулся на своем пути от насыпи питчера к своей тарелке.
Вращательное (вращательное) движение
Когда что-то вращается, грубо говоря, оно вращается по кругу.Ребенок, стоящий в одном месте на игровой площадке и вращающийся по кругу до тех пор, пока не достигнет своей исходной начальной точки, претерпел вращательное движение, но ему не нужно завершать круг, чтобы это было правдой; Ключевым моментом является то, что ее тело вращается вокруг четко определенной геометрической оси — в данном случае оси, идущей от макушки до земли у ее ног.
Вращение — это основа автомобильного транспорта. Чтобы автомобиль в целом можно было перевести, скажем, из Нью-Йорка в Лос-Анджелес, его колеса должны вращаться вокруг осей автомобиля, а многие внутренние части двигателя внутреннего сгорания автомобиля вращаются во время работы.Сама Земля вращается вокруг своей оси между Северным и Южным полюсами почти каждые 24 часа.
Возвратно-поступательное движение
Возвратно-поступательное движение связано с другими формами движения, в частности, с колебательным движением. В этой форме движения объект перемещается или перемещается линейно в одном направлении, а затем обратно по тому же пути в противоположном направлении, пока не вернется в свою исходную точку; затем цикл повторяется. Один из примеров — бензопила. Менее очевидный пример — человек, который едет на работу, а затем возвращается домой по тому же маршруту восемь или около того часов спустя, а затем повторяет это изо дня в день.Может показаться, что это очень разные начинания, но на самом деле они различаются только масштабами времени и расстояний; пила может двигаться с амплитудой всего в полметра и проходить весь свой путь внутрь несколько раз в секунду, в то время как пассажир может проезжать 20 миль дважды в день.
Колебательное движение
Вещи, которые движутся возвратно-поступательно, но с элементами вращательного движения, такими как раскачивание, называются колебательными. Маятник, который качается от фиксированной точки крепления и рисует дугу, является классическим примером.Спринклер или колеблющийся вентилятор делают то же самое, за исключением того, что они колеблются в горизонтальной плоскости, а не в вертикальной плоскости, и приводятся в действие двигателями, а не гравитацией.
Для полноты картины представьте себе разбрызгиватель такого типа, установленный на задней части автомобиля, который отслеживает дугу под углом 120 градусов при движении вперед и назад по 50-метровому участку железнодорожного пути. Это устройство имеет легко идентифицируемые поступательные, вращательные, возвратно-поступательные и колебательные формы движения, и большинство реальных движущихся объектов демонстрируют более одной формы движения при движении.
.