
Энергоиздат, 1982. —504 с, ил. (не полная!) // Библиотека технической литературы
Приведены основные технические данные асинхронных двигателей серии 4А основного исполнения, с повышенным пусковым моментом, с повышенным скольжением, многоскоростных и с фазным ротором. Даны сведения, необходимые для расчета пусковых режимов электродвигателей и выбора нагрузок.
Предназначен для инженерно-технических работников, занятых эксплуатацией и ремонтом электрических машни, а также проектированием электроприводов, как руководство по выбору электрических и механических нагрузок.
Размер: 1,84 Мб
Формат: djvu
Скачать книгу с depositfiles.com
Скачать книгу с rapidshare.com
Скачать книгу с dropbox.com
Не работает ссылка? Напишите об этом в комментарии.
Оглавление:
Предисловие.
Введение.
Глава первая. Основные сведения об электродвигателях серии 4А.
1.1. Структура серии.
1. 2. Условия эксплуатации.
2. Условия эксплуатации.
1.3. Двигатели основного исполнения.
1.4. Двигатели модификаций и специализированных исполнений.
Глава вторая. Основные технические данные электродвигателей серии 4А.
Глава третья. Пусковые свойства электродвигателей.
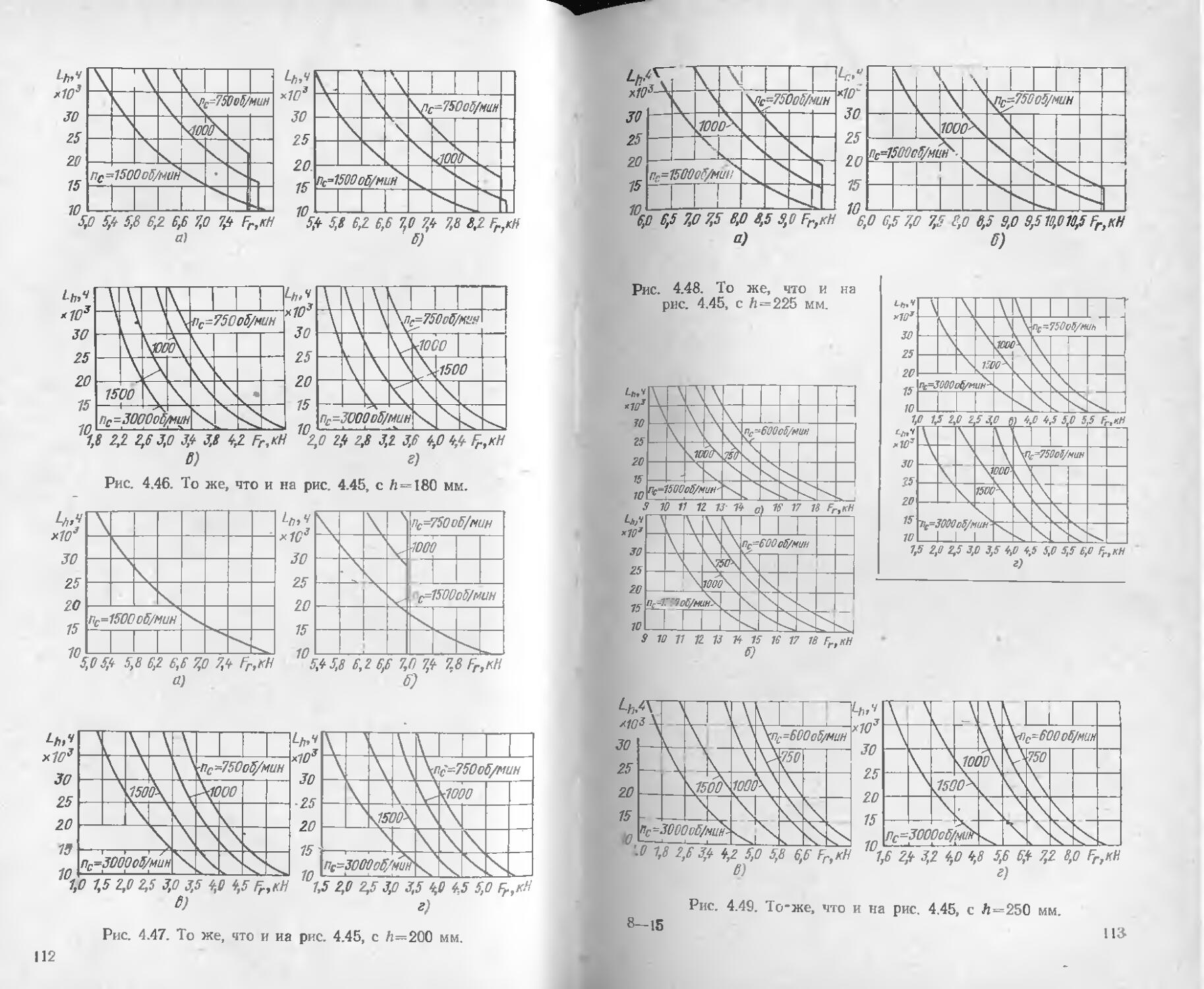
Глава четвертая. Допускаемые механические нагрузки на выступающий конец вала электродвигателя.
Глава пятая. Технические данные, необходимые для монтажа электродвигателей.
5.1. Вводные устройства.
5 2 Габаритные, установочные, присоединительные размеры и масса двигателей.
(!) Отсутствующие главы:
Глава шестая. Обмоточные данные. Конструкция системы изоляции.
Глава седьмая Схемы обмоток
7.1. Виды обмоток.
7 2. Одно-двухслойные концентрические обмотки.
7.3. Полюсно-переключаемые обмотки с тремя нулевыми точками.
7.4. Полюсно-переключаемые обмотки по схеме Харитонова.
7.5. Обмотки с переключением полюсов по принципу амплитудно-фазной модуляции.
Приложение 1. Основные определения и термины.
Приложение 2. Структура условных обозначений степени защиты, способа охлаждения, конструктивного исполнения по способу монтажа.
Приложение 3. Категории мест размещения двигателей при эксплуатации (условное обозначение и краткая характеристика).
Приложение 4. Размеры обмоточных проводов, применяемых в двигателях серии 4А.
Список литературы.
Технические данные электродвигателей — Энциклопедия по машиностроению XXL
из «Справочник мастера-сантехника Изд.6 »
Электродвигатели основного исполнения предназначены для эк сплуатации в помещениях с нормальной средой при температуре ок ружающего воздуха от —40 до 40 °С и относительной влажности его до 98% при температуре 25 °С. Запыленность воздуха должна быть не более 10 мг/м для электродвигателей закрытого исполнения и не более 2 мг/м для электродвигателей защищенного исполнения.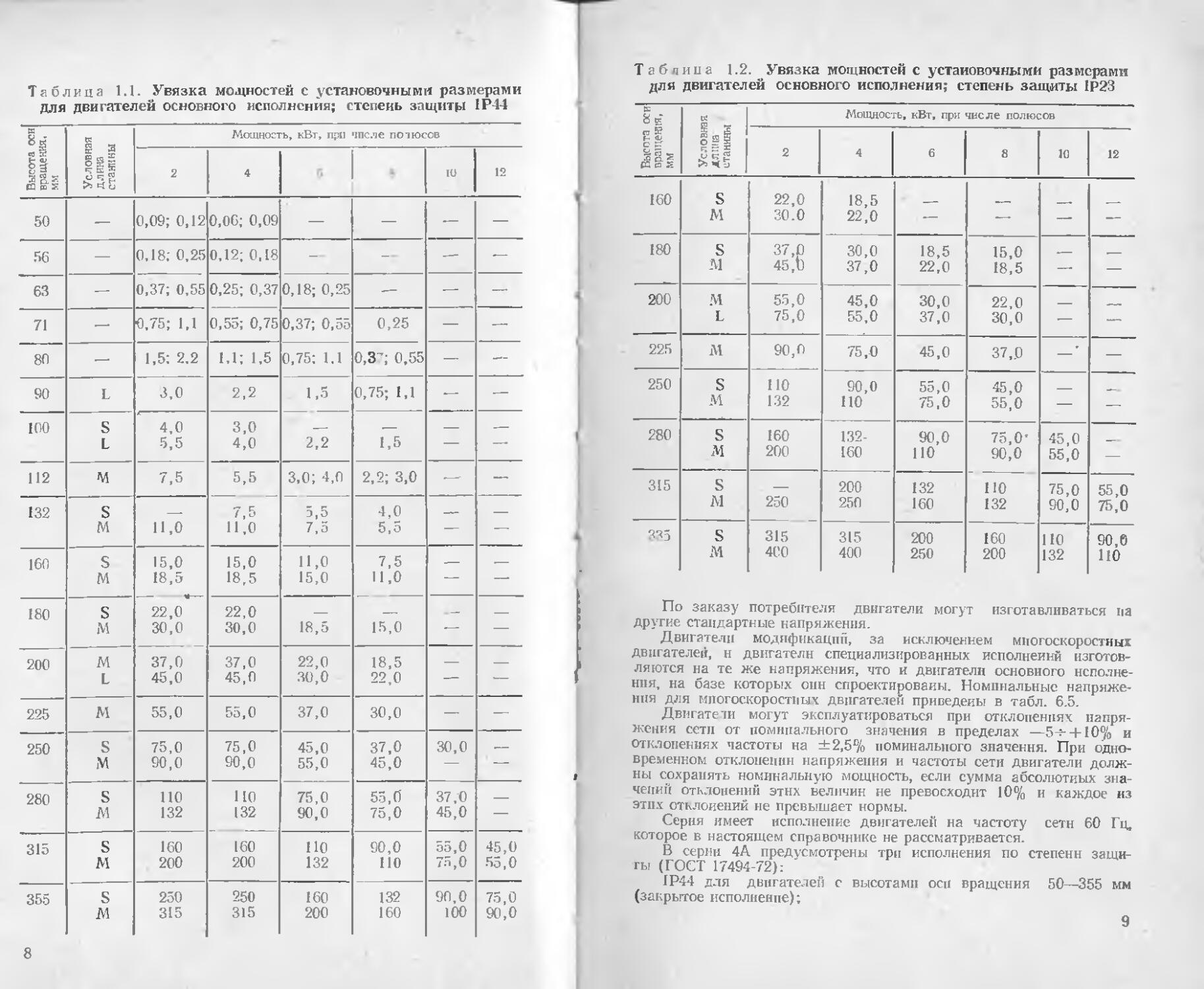 Окружающая среда не должна быть взрывоопасной и не должна содержать токопроводящей пыли, агрессивных газов и паров в концентра циях, разрушающих материал электродвигателя.
[c.263]
Окружающая среда не должна быть взрывоопасной и не должна содержать токопроводящей пыли, агрессивных газов и паров в концентра циях, разрушающих материал электродвигателя.
[c.263]
Асинхронные электродвигатели общего назначения выпускаются в виде единых серий, т. е. машины одной серии имеют общую конструкцию и одинаковые установочные размеры при одинаковой мощности и частоте вращения независимо, где они изготовляются.
[c.263]
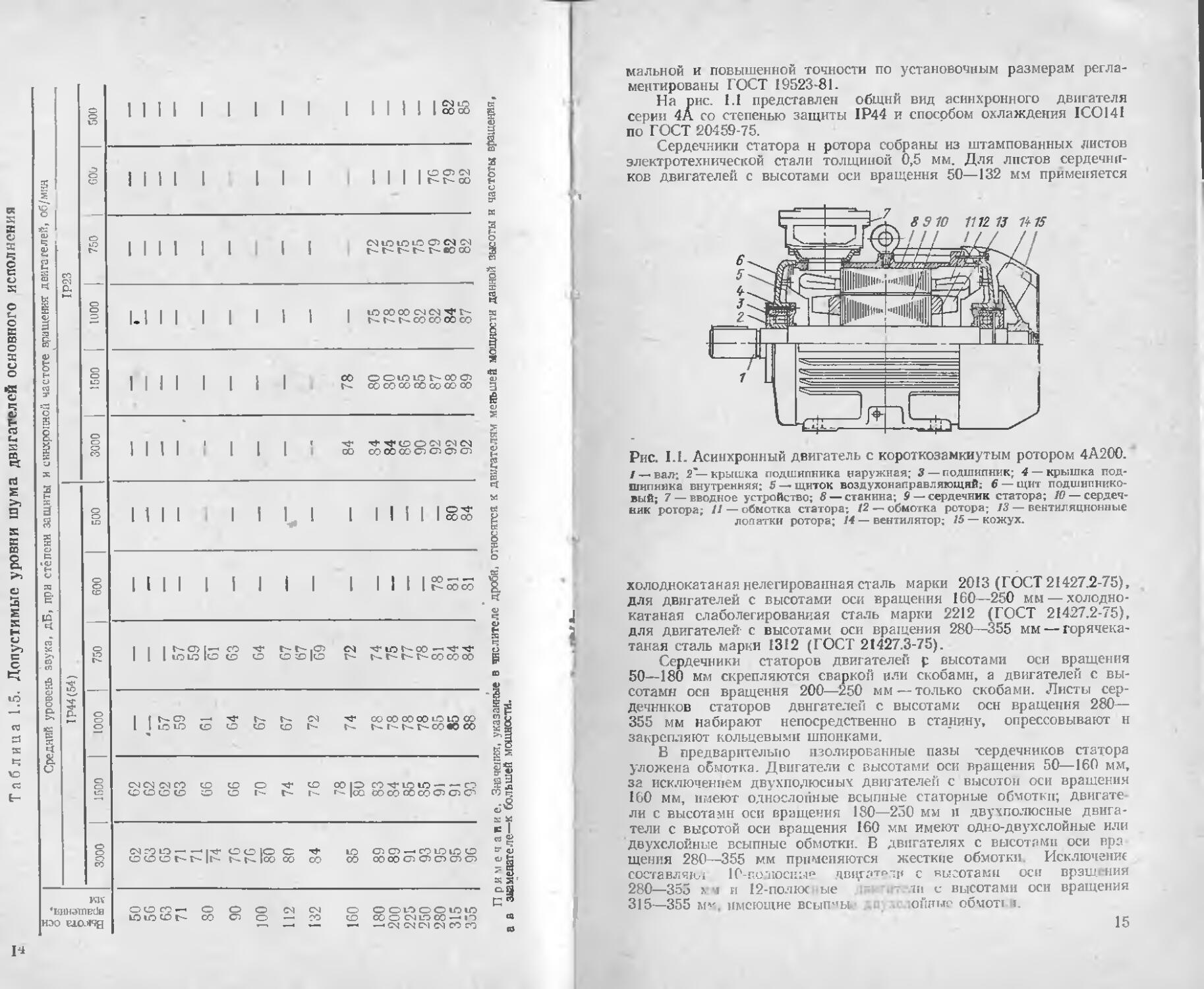
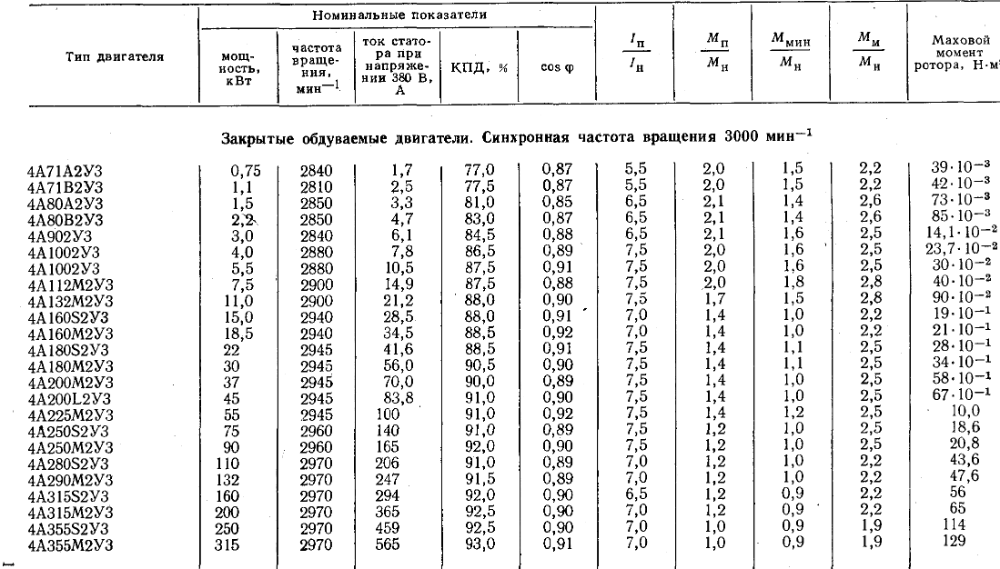
В данное время промышленность выпускает трехфазные асинхронные электродвигатели серии 4А (закрытые обдуваемые). В этой серии принята новая система обозначения типа электродвигателя вместо условного номера диаметра сердечника статора введена вы сота оси вращения, равная 50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200 мм и более.
[c.263]
Выпускаются электродвигатели серии 4А (закрытые обдуваемые) и 4АН (защищенные). Электродвигатели серии 4А с высотой оси вращения 50, 56 и 63 м изготовляются только в исполнении 4АА (станина и щит — алюминиевые). Четвертая серия охватывает диапазон мощностей от 0,06 до 400 кВт. Двигатели этой серии изготовляют на напряжения 220/380 и 380/660 В.
[c.263]
Четвертая серия охватывает диапазон мощностей от 0,06 до 400 кВт. Двигатели этой серии изготовляют на напряжения 220/380 и 380/660 В.
[c.263]
Примечание. Буквой А обозначают первую серию асинхронных электродвигателей, которая содержит семь габаритов (третий — девятый) по наружному диаметру. Серия имеет два номера длины сердечника статора и состоит из 14 типоразмеров. В серию А2 входят двигатели первого — девятого габаритов.
[c.263]
Примечания 1. Цифры после основного обозначения через тире означают первая — габарит по диаметру статора, вторая — порядковый номер длины статора. После этих цифр через тире указано число полюсов, 2. Для двигателей специальных исполнений в конце добавляют буквы X — химическое, Т — тропическое, В — влагохолодостойкое, Ш — малошумное.
[c.264]
Примечание. В серии 4А принята новая система обозначения типоразмеров электродвигателя. Например, электродвигатель 4АА50А2УЗ — трехфазный асинхронный короткозамкнутый защищенный, IV серии со станиной и щитами из алюминия с высотой оси вращения 50 мм, с установочным размером по длине станины А, двухполюсный, климатического исполнения У (умеренный климат), третьей категории. [c.264]
[c.264]
Примечание. Помимо основных номинальных режимов 5ь 52. 5з. 5 дополнительными являются следующие режимы повторно-кратковременный с частыми пусками 54, повторно-кратковременный с частыми пусками и электрическим торможением 5б, перемежающийся с частыми реверсами при электрическом торможении 5 , перемежающийся с двумя или более частотами вращения 5в.
[c.266]
Наиболее широкое распространение получили формы исполнения электрических машин М1, М2, М3. Обозначение формы исполнения электрической машины состоит из пяти знаков первый знак — буква М (машина), второй и третий обозначают вид, четвертый — исполнение, пятый — форму и количество выходных концов вала. Например, М101К — электрическая машина на лапах, с двумя подшипниковыми щитами, крепление горизонтальное лапами вниз, с одним концом вала, форма конца вала коническая.
[c.267]
Примечания 1. Для подшипников следует применять смазку, рекомендуемую заводом-изготовителем.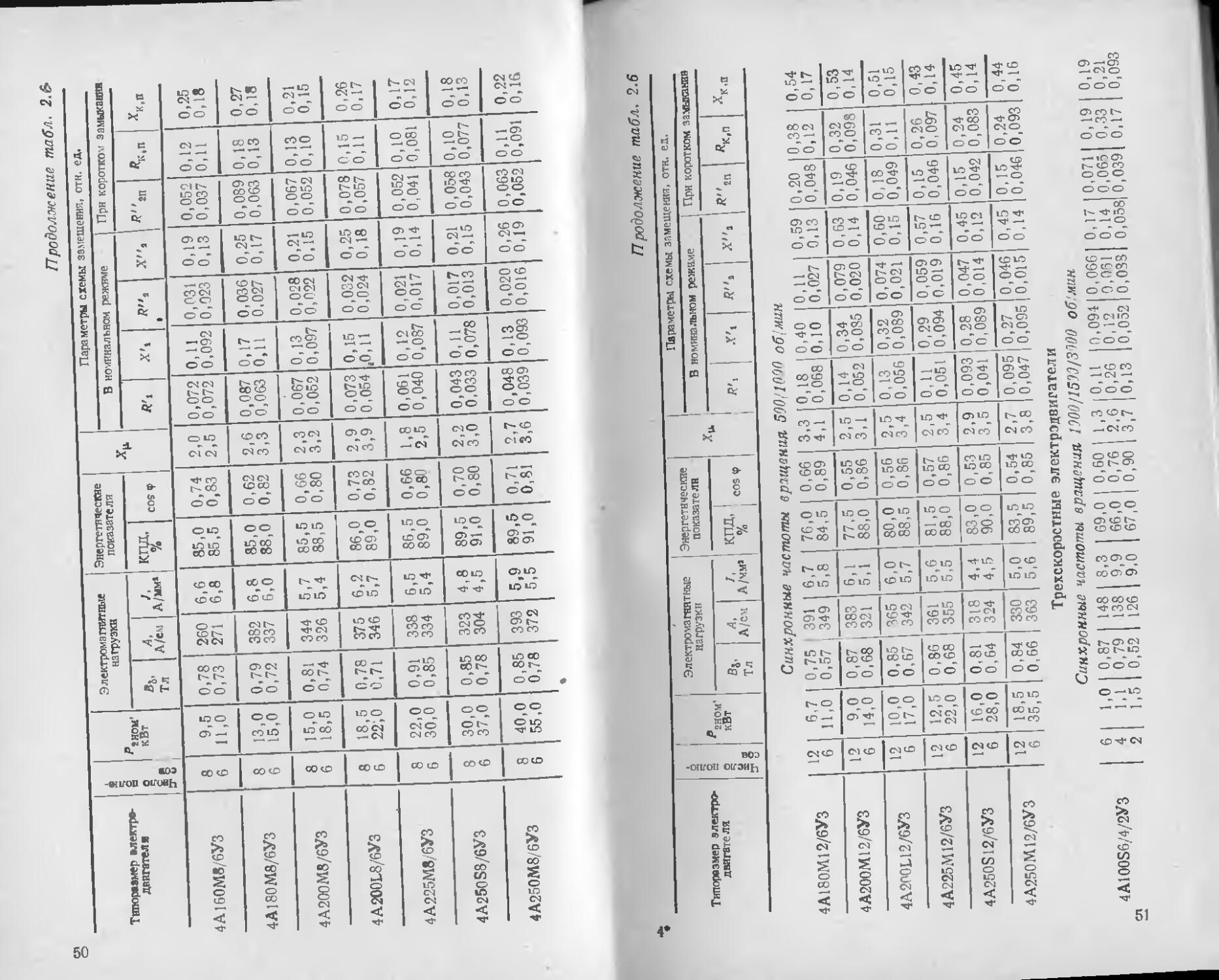 2. Качество применяемой смазки должно соответствовать нормам и подлежит проверке в лаборатории. 3. Неправильный выбор смазки является причиной повышенного нагрева подшипников и быстрого выхода их из строя.
[c.267]
2. Качество применяемой смазки должно соответствовать нормам и подлежит проверке в лаборатории. 3. Неправильный выбор смазки является причиной повышенного нагрева подшипников и быстрого выхода их из строя.
[c.267]
По способу охлаждения электродвигатели имеют исполнения с естественным охлаждением (двигатели не имеют охлаждающих устройств) и с самовентиляцией (с вентиляторами, укрепленными на вращающейся части).
[c.268]
Для электрической машины характерен номинальный режим работы, для которого машина предназначена заводом-изготовителем. Номинальный режим указывается на заводском щитке машины и должен соответствовать одному из основных режимов, указанных в табл. 20.6.
[c.268]
Организация инструментального хозяйства, потребность и порядок эксплуатации инструмента определены Положением об организации инструментального хозяйства в строительстве , которое является обязательным для общестроительных и специальных строительно-монтажных организаций, монтажных управлений и домостроительных комбинатов. [c.268]
[c.268]
В ИРП осуществляются также подготовка инструмента к работе, обеспечение его сменными рабочими органами, при необходимости профилактический ремонт ручных электрических и пневматических машин, также их учет и хранение. Капитальный ремонт производится в мастерских или на предприятиях. ИРП должен иметь складское и ремонтное отделения. Численный состав ИРП устанавливается министерством исходя из производственных условий и объемов выполняемых работ.
[c.269]
Порядок учета, выдачи и хранения инструмента, кроме строительно-монтажных пистолетов, устанавливается управлениями (участками) малой механизации. Ручные машины, электросиловое оборудование и грузоподъемные устройства выдаются рабочим, имеющим удостоверения на право пользования ими.
[c.269]
Строительно-монтажные пистолеты и дневная норма патронов к ним выдаются из складского отделения ИРП оператору при предъявлении удостоверения на право эксплуатации строительно-монтажного пистолета и допуска-наряда на производство работ, в котором должна быть указана дневная норма патронов. Оператор обязан ежедневно к концу рабочего дня оформлять сдачу в ИРП неизрасходованных патронов, а также стреляных гильз и патронов, давших осечку.
[c.269]
Оператор обязан ежедневно к концу рабочего дня оформлять сдачу в ИРП неизрасходованных патронов, а также стреляных гильз и патронов, давших осечку.
[c.269]
Для проверки электроинструмента на электробезопасность в ИРП должны быть специальные стенды. ИРП должны быть оснащены средствами электробезопасности (диэлектрические перчатки, сапоги, коврики и т. п.) в количестве, необходимом для обеспечения рабочих. Контроль за соблюдением техники безопасности возлагается на инженера по технике безопасности управления (участка) малой механизации.
[c.269]
Рулетки измерительные неметаллические (ГОСТ 11900—66) изготовляют двух типов РТ — тесьмяные с проволочной стабилизирующей основой для проведения измерений в строительстве РП — порг-новские. Длины шкал рулеток 3, 5, 10, 20 м.
[c.270]
Вернуться к основной статье
Кравчик А. Э., Шлаф М. М., Афонин В. И., Соболенская Е.
 А. Асинхронные двигатели серии 4А. Справочник — Електричні машини — Каталог файлов
А. Асинхронные двигатели серии 4А. Справочник — Електричні машини — Каталог файлов
А. Э. Кравчик, М. М. Шлаф, В. И. Афоннн, Е. А. Соболенская
Асинхронные двигатели серии 4А: Справочник/ А90 А.Э. Кравчик, М.М. ДЬлаф, В. И. Афонин, Е. А. Соболенская. — М.: Энергоиздат, 1982. —504 с, ил. В пер.: 1 р. 60 к.
Приведены основные технические данные асинхронных двигателей серии 4А основного исполнения, с повышенным пусковым моментом, с повышенным скольжением, многоскоростных и с фазным ротором. Даны сведения, необходимые для расчета пусковых режимов электродвигателей и выбора нагрузок.
Предназначен для инженерно-технических работнков, занятых эксплуатацией и ремонтом электрических машин, а также проектированием электроприводов, как руководство по выбору электрических и механических нагрузок.
© Энергоиздаг, 1982
СОДЕРЖАНИЕ
Предисловие
Введение
Глава первая. Основные сведения об электродвигателях серии 4А
1.1. Структура серии
1. 2. Условия эксплуатации
2. Условия эксплуатации
1.3. Двигатели
1.4. Двигатели модификации и специализированных исполнений
Глава вторая Основные технические данные электродвигателей серии 4А
Глава третья. Пусковые свойства электродвигателей
Глава четвертая. Допускаемые механические нагрузки на выступающий конец вала электродвигателя
Глава пятая. Технические данные, необходимые для монтажа электродвигателей
5.1. Вводные устройства
5.2. Габаритные, установочные, присоединительные размеры и масса двигателей
Глава шестая. Обмоточные данные. Конструкция системы изоляции
Глава седьмая Схемы обмоток
7.1. Виды обмоток
7.2. Одно-двухслойные концентрические обмотки
7.3. Полюсно-переключаемые обмотки с тремя нулевыми точками
7.4. Полюсно-переключаемые обмотки по схеме Харитонова
7.5. Обмотки с включением полюсов по принципу амплитудно-фазовой модуляции
Приложение 1. Основные определения и термины
Приложение 2. Структура условных обозначений степени защиты, способа охлаждения, конструктивного исполнения по способу монтажа
Приложение 3. Категории мест размещения двигателей при эксплуатации (условное обозначение и краткая характеристика)
Категории мест размещения двигателей при эксплуатации (условное обозначение и краткая характеристика)
Приложение 4. Размеры обмоточных проводов, применяемых в двигателях серии 4А
Список литературы
Краткое руководство по применению насоса серии
M-Max MN040046EN
%PDF-1.5
%
256 0 объект
>
эндообъект
257 0 объект
>/Шрифт>>>/Поля[]>>
эндообъект
271 0 объект
>поток
11.08.5402018-12-03T03:38:23.782-05:00Acrobat Distiller 18.0 (Macintosh)065a0acdeeb1c7797fee00505ee559fa4859fb9f630509Преобразователь частоты | Энергоэффективность | Руководства
Acrobat Distiller 18.0 (Macintosh)PScript5.dll версии 5.2.22018-12-03T10:06:38.000+05:302018-12-02T23:36:38.000-05:002018-06-11T08:32:17.000-04:00application/pdf
2018-12-03T03:39:30.865-05:00
uuid:aa0e6f52-cf73-ab4d-8888-4db78979903buuid:bad5df6f-1a5b-4c32-a164-5450d05b4c32
конечный поток
эндообъект
253 0 объект
>
эндообъект
60 0 объект
>
эндообъект
14 0 объект
>
эндообъект
61 0 объект
>
эндообъект
97 0 объект
>
эндообъект
136 0 объект
>
эндообъект
133 0 объект
>
эндообъект
137 0 объект
>
эндообъект
140 0 объект
>
эндообъект
143 0 объект
>
эндообъект
146 0 объект
>
эндообъект
149 0 объект
>
эндообъект
152 0 объект
>
эндообъект
155 0 объект
>
эндообъект
158 0 объект
>
эндообъект
161 0 объект
>
эндообъект
258 0 объект
[259 0 Р 260 0 Р]
эндообъект
162 0 объект
>поток
hZn#Ir}W#hUW3gvk/ཌྷlC$)RCR-~Dd1=k3Y»0r_\cYl:uMHYڮ轚]dQzqmևfqa7ñWZs\ۖrqs^Z?(. wAW:NfYu7Gw:kgMowwO#JOtf
wAW:NfYu7Gw:kgMowwO#JOtf
_kfʴ&\)Sp»q~\/#K[jv~ -}w7mȍf}ci.Bjُ3Ӭ)١?~l1S*
4u\G4MmpPNfLֆlfDfv;pm>AH\ZkvmoKńM%ȋqLZWZk9Ԗmo#C
48+$ř3W3n*@;*mmH64t
Методы управления скоростью различных типов двигателей с регулированием скорости
Казуя ШИРАХАТА
Компания Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулируемой скоростью. Наши блоки управления скоростью включают в себя двигатель, привод (контроллер) и потенциометр, который позволяет легко регулировать скорость.Существует три группы двигателей с регулированием скорости. «Моторный блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсатором, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который сочетает в себе трехфазный асинхронный двигатель с маленький инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
В нашем окружении используется большое количество двигателей общего назначения, от бытовой техники до станков на промышленных объектах.Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Функции и характеристики, необходимые для этих двигателей, очень разнообразны. Если сосредоточить внимание на сегменте управления скоростью на рынке двигателей, серводвигатели и шаговые двигатели регулируют свою скорость с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и/или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и особенности следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Двигатель переменного тока с регулятором скорости и мотор-редукторы
- Бесщеточный двигатель постоянного тока и мотор-редукторы
- Блок инвертора
2.
 Методы управления скоростью различных двигателей с регулированием скорости
Методы управления скоростью различных двигателей с регулированием скорости
Метод управления выходом схемы управления скоростью можно условно разделить на две группы: управление фазой и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис. 1 Классификация двигателей с регулируемой скоростью
2.1. Двигатели с регулируемой скоростью переменного тока
2.1.1. Конструкция двигателя
Как показано на рис. 2, конструкция однофазных и трехфазных асинхронных двигателей включает в себя статор, на который намотана первичная обмотка, и литой из цельного алюминия ротор в форме корзины. Ротор недорогой, потому что конструкция проста и не использует магнит.
Рис. 2 Конструкция асинхронного двигателя
Когда необходимо контролировать скорость этого двигателя, для определения скорости используется тахогенератор, который крепится к двигателю, как показано на рис. 3. Тахогенератор состоит из магнита, соединенного непосредственно с валом двигателя, и катушки статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот. Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
3. Тахогенератор состоит из магнита, соединенного непосредственно с валом двигателя, и катушки статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот. Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис. 3 Система управления двигателем переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя может быть представлена выражением (1).Когда напряжение, подаваемое на двигатель, увеличивается и уменьшается, скольжение с изменяется, затем изменяется скорость вращения N.
N = 120· f ·(1- s )/ P · · · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, как показано на рис. 4, на кривой «скорость вращения — крутящий момент» существует стабильный диапазон и нестабильный диапазон.Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление без обратной связи) ограничивается управлением скоростью в узком диапазоне, подобном N1~N3 на рис. 5. Чтобы сделать возможной надежную работу даже в В вышеупомянутом нестабильном диапазоне необходимо определить скорость вращения двигателя и использовать механизм управления напряжением (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
4, на кривой «скорость вращения — крутящий момент» существует стабильный диапазон и нестабильный диапазон.Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление без обратной связи) ограничивается управлением скоростью в узком диапазоне, подобном N1~N3 на рис. 5. Чтобы сделать возможной надежную работу даже в В вышеупомянутом нестабильном диапазоне необходимо определить скорость вращения двигателя и использовать механизм управления напряжением (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
Рис. 4 Частота вращения – характеристики крутящего момента асинхронных двигателей
Рис.5 Простое управление напряжением
Доступные методы управления напряжением включают управление трансформатором или управление фазами. На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так просто реализовать с двигателем переменного тока с регулируемой скоростью. В качестве альтернативы, напряжение переменного тока можно регулировать, устанавливая время включения/выключения каждого полупериода напряжения переменного тока (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжение, как показано на рис.7 и рис. 8. Управление скоростью достигается методом управления фазой путем управления среднеквадратичным значением. значение переменного напряжения.
Этот метод не так просто реализовать с двигателем переменного тока с регулируемой скоростью. В качестве альтернативы, напряжение переменного тока можно регулировать, устанавливая время включения/выключения каждого полупериода напряжения переменного тока (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжение, как показано на рис.7 и рис. 8. Управление скоростью достигается методом управления фазой путем управления среднеквадратичным значением. значение переменного напряжения.
Рис. 6 Изменение напряжения трансформатором
Рис. 7 Изменение напряжения с помощью фазового управления
Рис. 8 Цепь управления симистором
Этот метод управления скоростью переменного тока может обеспечить устойчивое управление скоростью с помощью управления фазой с обратной связью даже в нестабильном диапазоне.
На рис. 9 в виде блок-схемы показана конфигурация системы управления скоростью для двигателя переменного тока с регулированием скорости.
Рис. 9 Блок-схема системы управления двигателем переменного тока
Рис. 10 Форма сигнала для каждого блока
На рис. 10 показаны формы сигналов каждого блока. Заданное значение скорости d и обнаруженное напряжение e скорости, генерируемой тахогенератором, сравниваются в блоке усилителя сравнения.Затем определяется уровень сигнала напряжения a .
Сигнал напряжения и низкий, когда значение обнаруженной скорости достигает установленного значения скорости, и выше, когда заданное значение скорости снижается. Поскольку триггерный сигнал выводится в точке пересечения треугольной волны b с сигналом напряжения a , время (фазовый угол) включения симистора определяется уровнем сигнала напряжения a . Когда это время медленное, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается.Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
Когда это время медленное, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается.Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид вышеупомянутого регулятора скорости. На рис. 11 рабочая точка двигателя рисует петлю Q-R-S-T-Q с центром в точке O, а скорость вращения поддерживается между N1 и N2. Эта петля максимально уменьшена за счет повышения точности определения скорости.
Рис.11 Работа регулятора скорости
Электродвигатель с регулированием скорости переменного тока имеет следующие особенности при использовании фазового управления с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть сконфигурирована просто потому, что сглаживающая схема не нужна, что позволяет получить компактную конструкцию по низкой цене.
2) Точно так же возможна конструкция с длительным сроком службы, поскольку не нужен большой алюминиевый электролитический конденсатор.
3) Переключение выполняется только один раз в каждом полупериоде стандартного источника питания переменного тока, что позволяет снизить генерируемый шум.
2.1.3. Характеристики
Электродвигатели переменного тока с регулированием скорости обычно имеют характеристики скорости вращения и крутящего момента, показанные на рис. 12.
Рис. 12 Характеристики скорости вращения
«Линия безопасной работы» представлена на рис. 12. «Линия безопасной работы» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный блок управления скоростью постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, то катушка соединена звездой (звездой) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов.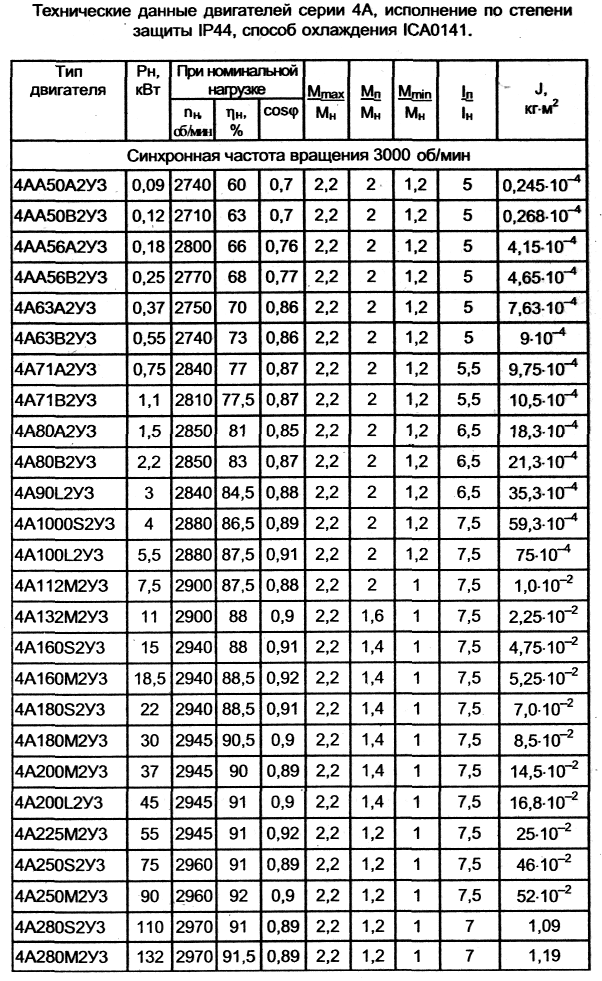 намагничены в многополюсной конфигурации, как показано на рис. 14.
намагничены в многополюсной конфигурации, как показано на рис. 14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов на каждый оборот ротор.
Рис. 14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики скорости вращения бесщеточного двигателя постоянного тока имеют отрицательный наклон, когда его скорость не регулируется, что аналогично характеристике коллекторного двигателя постоянного тока.
Рис. 15 Характеристики скорости вращения и крутящего момента бесщеточного двигателя постоянного тока
Когда нагрузка отсутствует, а входное напряжение установлено на уровне V2 на рис. 15, рабочая точка двигателя становится P, а скорость вращения равна N1.Когда приложен момент нагрузки T1, рабочая точка смещается к Q, а скорость вращения уменьшается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизм управления скоростью должен будет изменять входное напряжение только всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизм управления скоростью должен будет изменять входное напряжение только всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Это управление напряжением реализовано инвертором в выходной части схемы управления (драйвер).Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как показано на рис. 16 (b), с помощью шести переключающих элементов (FET или IGBT), показанных на рис. 16 (a).
Рис. 16 (a) Выходная часть схемы управления (драйвер)
Рис. 16 (b) Последовательность переключения
Переключающие элементы подключены к обмотке двигателя, как показано на рис. 16 (а), а состояние ВКЛ/ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, т. е. какая катушка становится полюсом N или полюсом S.
е. какая катушка становится полюсом N или полюсом S.
Фактически положение магнитного полюса ротора определяется микросхемой Холла, и соответствующий переключающий элемент включается или выключается, как показано на рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включены, и ток течет из фазы U в фазу W. В это время U-фаза возбуждается как полюс N, а W-фаза становится полюсом S, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1). ~ 12).
На рис. 17 показана конфигурация для управления скоростью бесщеточного двигателя постоянного тока в виде блок-схемы.
Рис. 17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от микросхемы Холла в части определения положения блок-схемы, и двигатель вращается.
Затем сигнал от IC Холла отправляется на детектор скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом задания скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения. Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения. Бесщеточные двигатели постоянного тока
Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения. Бесщеточные двигатели постоянного тока
имеют следующие особенности.
1) Он имеет высокий КПД, так как используется ротор с постоянными магнитами, а вторичные потери малы.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость отклика.
3) Двигатель можно уменьшить, поскольку он очень эффективен.
4) Небольшие колебания скорости при изменении нагрузки.
Рис.16 показана типичная последовательность переключения (метод подачи питания на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод синусоидального привода, получая информацию о положении ротора с высоким разрешением от программного обеспечения из сигнала Холла IC. Этот метод приводит к малошумному приводу, поскольку ток, который течет к двигателю, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, подаваемых методом синусоидального привода и методом 120-градусного привода
2. 2.3. Характеристики
2.3. Характеристики
Характеристики скорости вращения бесщеточного двигателя постоянного тока имеют ограниченный рабочий диапазон в дополнение к непрерывному рабочему диапазону.
Область ограниченного режима работы очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме продолжается в течение пяти секунд или более, активируется функция защиты привода от перегрузки, и двигатель замедляется до полной остановки.
2.3. Инверторный блок управления скоростью
2.3.1. Принцип управления скоростью
Инверторный блок регулирует скорость трехфазного асинхронного двигателя путем изменения частоты f подаваемого на двигатель напряжения. Инверторный блок изменяет частоту f путем изменения цикла ВКЛ/ВЫКЛ шести переключающих элементов, а скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120· f ·(1- s )/ P ·· · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор управляет рабочим циклом ВКЛ/ВЫКЛ, как показано на рис. 21. Время включения/выключения контролируется таким образом, чтобы среднее напряжение, подаваемое на двигатель, приобретало синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
21. Время включения/выключения контролируется таким образом, чтобы среднее напряжение, подаваемое на двигатель, приобретало синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
Рис. 19 Рабочий контроль ВКЛ/ВЫКЛ
Метод управления скоростью наших инверторных блоков делится на два типа: управление без обратной связи, которое просто изменяет скорость, и управление с обратной связью, которое уменьшает изменение скорости при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация системы управления в виде блок-схемы.
Рис. 20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и может достигать высоких скоростей (частота может быть установлена до 80 Гц) просто тогда, когда регулирование скорости при различных нагрузках не так важно.
Создаваемый крутящий момент T двигателя отображается по формуле (2).Из этого соотношения можно сказать, что крутящий момент также будет постоянным, если V/f, отношение напряжения V к частоте f, будет постоянным.
T = K ・ I・V / f ・・・(2)
T : крутящий момент [N · M]
V : напряжение питания [V]
I : ток двигателя [A]
F : Частота [Гц]
K : Константа
Однако, чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f.Следовательно, чтобы получить постоянный крутящий момент от низкой скорости до высокой, необходимо отрегулировать отношение V/f на низкой скорости в соответствии с характеристиками двигателя, как показано сплошной линией на рис. 23.
Рис. 21 Управление U/f
2) Управление с обратной связью
На рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис. 22 Блок-схема управления с обратной связью
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, используя таблицу данных характеристик (рис.25), подготовленный заранее, и регулирует частоту инвертора без необходимости использования датчика скорости на двигателе.
Рис. 23 Таблица данных характеристик
С помощью этой таблицы характеристик и обнаруженного времени разности фаз t инвертор вычисляет выходную частоту инвертора, которая соответствует команде скорости вращения Nset, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления V/f вычисляет напряжение, подаваемое на двигатель, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM. В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)
В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)
2.3.2. Характеристика с
Характеристики скорости вращения и крутящего момента инверторного блока показаны на рис. 26 и рис. 27. Как поясняется в разделе, посвященном двигателю с регулированием скорости переменного тока, на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет собой предел непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис. 24. Характеристики скорости вращения для управления без обратной связи
Рис. 25. Характеристики скорости вращения для регулирования с обратной связью
3. Резюме
Oriental Motor предлагает три группы продуктов (двигатели переменного тока с регулированием скорости, бесщеточные двигатели постоянного тока с регулированием скорости и инверторные блоки) для использования в широком диапазоне приложений управления скоростью. Подходящий продукт для управления скоростью можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, необходимой для вашего приложения.
Подходящий продукт для управления скоростью можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, необходимой для вашего приложения.
Oriental Motor продолжит работу над разработкой продукции, чтобы в будущем мы могли предлагать продукцию, которая наилучшим образом отвечает различным потребностям наших клиентов.
Каталожные номера
(1) Исследовательская группа по технологиям двигателей переменного тока: «Книга для понимания малых двигателей переменного тока», Kogyo Chosakai Publishing (1998) 19-25 (2003)
(3) Коджи Намихана, Масаёси Сато: «Новый метод управления трехфазным асинхронным двигателем», RENGA No.159, стр. 23-28 (1999)
| Kazuya Shirahata Завод Tsuruoka, ACIX Operations Отдел схемотехники Отдел разработки схем |
%PDF-1.6
%
7294 0 объект
>
эндообъект
внешняя ссылка
7294 94
0000000016 00000 н
0000004226 00000 н
0000004411 00000 н
0000004440 00000 н
0000004490 00000 н
0000004551 00000 н
0000004756 00000 н
0000004944 00000 н
0000005023 00000 н
0000005101 00000 н
0000006315 00000 н
0000007422 00000 н
0000008596 00000 н
0000008668 00000 н
0000009541 00000 н
0000010723 00000 н
0000011914 00000 н
0000012132 00000 н
0000012359 00000 н
0000013546 00000 н
0000014688 00000 н
0000015792 00000 н
0000016914 00000 н
0000017895 00000 н
0000028373 00000 н
0000038870 00000 н
0000386478 00000 н
0000386539 00000 н
0000386654 00000 н
0000386744 00000 н
0000386896 00000 н
0000387046 00000 н
0000387199 00000 н
0000387346 00000 н
0000387498 00000 н
0000387654 00000 н
0000387805 00000 н
0000387968 00000 н
0000388116 00000 н
0000388248 00000 н
0000388397 00000 н
0000388552 00000 н
0000388700 00000 н
0000388818 00000 н
0000388968 00000 н
0000389109 00000 н
0000389253 00000 н
0000389371 00000 н
0000389505 00000 н
0000389637 00000 н
0000389769 00000 н
0000389897 00000 н
00003
00000 н
00003 00000 н
00003
00000 н
00003
00000 н
0000390545 00000 н
0000390691 00000 н
0000390809 00000 н
0000390955 00000 н
0000391109 00000 н
0000391265 00000 н
0000391405 00000 н
0000391537 00000 н
0000391677 00000 н
0000391801 00000 н
0000391913 00000 н
0000392063 00000 н
0000392201 00000 н
0000392333 00000 н
0000392453 00000 н
0000392591 00000 н
0000392695 00000 н
0000392851 00000 н
0000392981 00000 н
0000393087 00000 н
0000393241 00000 н
0000393387 00000 н
0000393509 00000 н
0000393624 00000 н
0000393741 00000 н
0000393850 00000 н
0000393975 00000 н
0000394166 00000 н
0000394323 00000 н
0000394462 00000 н
0000394619 00000 н
0000394760 00000 н
0000394919 00000 н
0000395076 00000 н
0000395217 00000 н
0000395344 00000 н
0000395481 00000 н
0000002176 00000 н
трейлер
]/предыдущая 2630358>>
startxref
0
%%EOF
7387 0 объект
>поток
hW[pw%wֺƑ];
D cd,b6CE8Bq. kc`!\|ɗPLIҙL3e4}jgC;$@fҙgofiҝ?=
kc`!\|ɗPLIҙL3e4}jgC;$@fҙgofiҝ?=
Главная | Международная корпорация Тошиба
Подразделение Motors & Drives предлагает полный спектр двигателей низкого и среднего напряжения и приводов с регулируемой скоростью. Эти продукты, отличающиеся качеством, производительностью и долговечностью, могут быть адаптированы для самых требовательных приложений.
Нажмите здесь, чтобы увидеть все наши продукты Motors & Drives >
Подразделение силовой электроники предлагает решения для кондиционирования и защиты электропитания, среди которых выделяются системы бесперебойного питания, аккумуляторы с быстрой перезарядкой (SCiB
® ) и предприятия по кондиционированию электроэнергии.Продукты TIC Power Electronics известны своей надежностью и эффективностью и идеально подходят для ключевых рынков, таких как центры обработки данных, здравоохранение и промышленность. Клиенты получают выгоду от компактной конструкции, обширных гарантийных планов, а также круглосуточного обслуживания и поддержки.
Нажмите здесь, чтобы увидеть все наши продукты для силовой электроники >
Подразделение передачи и распределения со штаб-квартирой в Хьюстоне является частью мирового лидера Toshiba Corp. в поставке интегрированных решений для передачи, распределения энергии и интеллектуальных сообществ.Являясь одним из крупнейших в мире производителей современного передающего и распределительного оборудования, Toshiba уже более века поставляет на мировой рынок высоконадежную и инновационную продукцию. Подразделение TIC Transmission & Distribution обслуживает североамериканский рынок, предлагая продукты, отвечающие рыночному спросу на большую мощность, компактный дизайн и экологически безопасные решения, обеспечивающие впечатляющие рейтинги эффективности и отличные результаты.
Нажмите здесь, чтобы увидеть все наши продукты для передачи и распределения >
Доступные системы социальной инфраструктуры можно дополнительно настроить за счет добавления контрольно-измерительных приборов, систем управления технологическими процессами или программируемых логических элементов управления.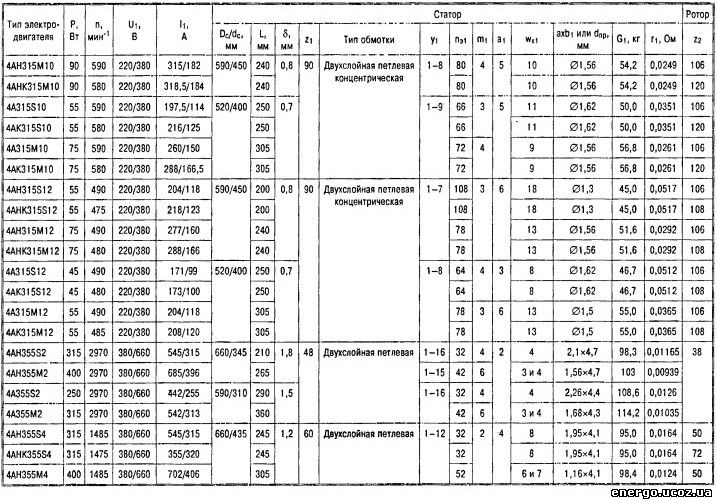 Кроме того, TIC предлагает решения для транспортных систем, системы безопасности и автоматизации, а также гибридные двигатели для электромобилей.
Кроме того, TIC предлагает решения для транспортных систем, системы безопасности и автоматизации, а также гибридные двигатели для электромобилей.
С 2011 года Toshiba International Corporation производит высокопроизводительные приводные двигатели для гибридных электромобилей (HEV). Современный завод HEV занимает площадь 45 000 квадратных футов и ежегодно производит более 130 000 двигателей. Завод, на котором работает более 100 человек, поставляет двигатели и генераторы для гибридных электромобилей, включая модели Ford Fusion Hybrid и C-Max.
Нажмите здесь, чтобы увидеть все наши автомобильные системы >
.