
РАЗНИЦА МЕЖДУ СИНХРОННЫМ ДВИГАТЕЛЕМ И АСИНХРОННЫМ ДВИГАТЕЛЕМ | СРАВНИТЕ РАЗНИЦУ МЕЖДУ ПОХОЖИМИ ТЕРМИНАМИ — ТЕХНОЛОГИЯ
Синхронный двигатель против асинхронного двигателя И асинхронные двигатели, и синхронные двигатели представляют собой двигатели переменного тока, используемые для преобразования электрической энерги
Синхронный двигатель против асинхронного двигателя
И асинхронные двигатели, и синхронные двигатели представляют собой двигатели переменного тока, используемые для преобразования электрической энергии в механическую.
Подробнее об асинхронных двигателях
Первые асинхронные двигатели, основанные на принципах электромагнитной индукции, независимо друг от друга изобрели Никола Тесла (в 1883 г.) и Галилео Феррарис (в 1885 г.). Из-за своей простой конструкции и прочного использования, а также низких затрат на строительство и техническое обслуживание, асинхронные двигатели были предпочтительнее многих других двигателей переменного тока для тяжелого оборудования и машин.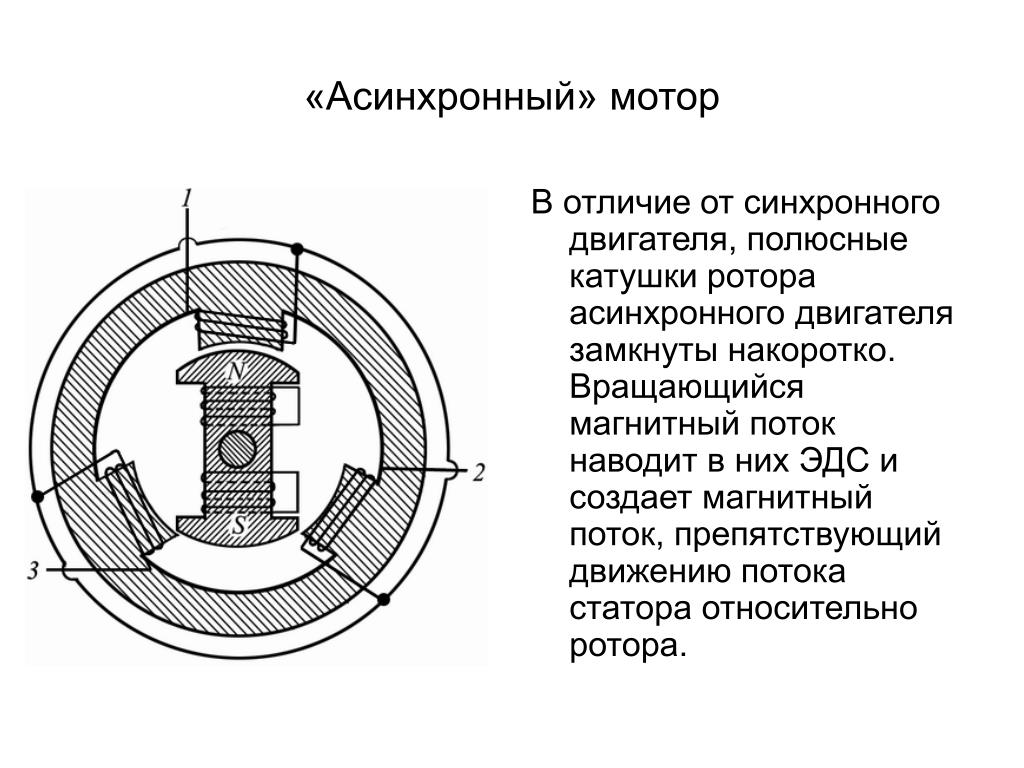
Конструкция и сборка асинхронного двигателя просты. Две основные части асинхронного двигателя — это статор и ротор. Статор в асинхронном двигателе представляет собой серию концентрических магнитных полюсов (обычно электромагнитов), а ротор — серию замкнутых обмоток или алюминиевых стержней, расположенных аналогично короткозамкнутой клетке, отсюда и название ротора с короткозамкнутой клеткой. Вал для передачи создаваемого крутящего момента проходит через ось ротора. Ротор находится внутри цилиндрической полости статора, но не имеет электрического соединения с какой-либо внешней цепью. Коммутатор, щетки или другие соединительные механизмы не используются для подачи тока на ротор.
Как и любой двигатель, он использует магнитные силы для вращения ротора. Соединения в катушках статора расположены таким образом, что противоположные полюса образуются на прямо противоположной стороне катушек статора. На этапе запуска создаются периодически изменяющиеся по периметру магнитные полюса. Это создает изменение потока через обмотки ротора и индуцирует ток. Этот индуцированный ток создает магнитное поле в обмотках ротора, и взаимодействие между полем статора и индуцированным полем приводит в движение двигатель.
Это создает изменение потока через обмотки ротора и индуцирует ток. Этот индуцированный ток создает магнитное поле в обмотках ротора, и взаимодействие между полем статора и индуцированным полем приводит в движение двигатель.
Асинхронные двигатели предназначены для работы как с однофазным, так и с многофазным током, последний для тяжелых машин, требующих большого крутящего момента. Скорость асинхронных двигателей можно регулировать либо с помощью количества магнитных полюсов в полюсе статора, либо путем регулирования частоты входного источника питания. Скольжение, которое является мерой для определения крутящего момента двигателя, указывает на его КПД. Короткозамкнутые обмотки ротора имеют малое сопротивление, что приводит к возникновению большого тока для небольшого скольжения в роторе; следовательно, он производит большой крутящий момент.
При максимально возможных условиях нагрузки скольжение для малых двигателей составляет около 4-6% и 1,5-2% для больших двигателей, поэтому считается, что асинхронные двигатели имеют регулировку скорости и считаются двигателями с постоянной скоростью. Тем не менее, скорость вращения ротора ниже, чем частота входного источника питания.
Тем не менее, скорость вращения ротора ниже, чем частота входного источника питания.
Подробнее о синхронном двигателе
Синхронный двигатель — другой основной тип двигателя переменного тока. Синхронный двигатель предназначен для работы без разницы в скорости вращения вала и частоте переменного тока источника; период вращения является целым кратным циклам переменного тока.
Есть три основных типа синхронных двигателей; двигатели с постоянными магнитами, двигатели с гистерезисом и реактивные двигатели. Постоянные магниты из неодима-бор-железа, самария-кобальта или феррита используются в качестве постоянных магнитов на роторе. Приводы с регулируемой скоростью, в которых статор питается от переменной частоты, переменного напряжения, являются основным применением двигателей с постоянными магнитами. Они используются в устройствах, которым требуется точный контроль скорости и положения.
Гистерезисные двигатели имеют прочный гладкий цилиндрический ротор, отлитый из магнитной «твердой» кобальтовой стали с высокой коэрцитивной силой. Этот материал имеет широкую петлю гистерезиса, то есть, как только он намагничивается в заданном направлении, ему требуется большое обратное магнитное поле в противоположном направлении для изменения намагниченности. В результате двигатель с гистерезисом имеет угол запаздывания δ, который не зависит от скорости; он развивает постоянный крутящий момент от запуска до синхронной скорости. Таким образом, он самозапускается и для его запуска не требуется индукционная обмотка.
Этот материал имеет широкую петлю гистерезиса, то есть, как только он намагничивается в заданном направлении, ему требуется большое обратное магнитное поле в противоположном направлении для изменения намагниченности. В результате двигатель с гистерезисом имеет угол запаздывания δ, который не зависит от скорости; он развивает постоянный крутящий момент от запуска до синхронной скорости. Таким образом, он самозапускается и для его запуска не требуется индукционная обмотка.
Асинхронный двигатель против синхронного двигателя
• Синхронные двигатели работают с синхронной скоростью (RPM = 120f / p), в то время как асинхронные двигатели работают на скорости ниже синхронной (RPM = 120f / p — скольжение), а скольжение практически равно нулю при нулевом моменте нагрузки, а скольжение увеличивается с увеличением момента нагрузки. .
• Синхронным двигателям требуется постоянный ток для создания поля в обмотках ротора; от асинхронных двигателей не требуется подавать ток на ротор.
• Синхронным двигателям требуются контактные кольца и щетки для подключения ротора к источнику питания. Асинхронные двигатели не требуют контактных колец.
• Синхронным двигателям требуются обмотки в роторе, в то время как асинхронные двигатели чаще всего строятся с токопроводящими шинами в роторе или используют короткозамкнутые обмотки для образования «беличьей клетки».
Серводвигатели – синхронные и асинхронные
Для динамичных и точных сервоприводных систем у нас тоже есть модульная система двигателей. Выберите из трех синхронных и одной асинхронной серий свой оптимальный серводвигатель: компактный, малоинерционный и мощный. Множество типоразмеров и вариантов конструктивной длины обеспечивают широкую сферу применения и надежный пусковой момент.
Что такое серводвигатели?
Серводвигатель – это двигатель, который позволяет контролировать точное положение вала двигателя, а также частоту вращения и/или ускорение. Для этого применяются соответствующие датчики и способы автоматического регулирования. Раньше серводвигатели были вспомогательными приводами, которые конструировались для применения в станках. Впрочем, своим названием серводвигатель обязан латинскому слову „servus“, что по-русски означает „слуга“. В качестве серводвигателей может использоваться асинхронный двигатель, синхронный двигатель или двигатель постоянного тока. То есть различие между этими двигателями заключается не в самом принципе привода, а только в их возможностях регулирования.
Для этого применяются соответствующие датчики и способы автоматического регулирования. Раньше серводвигатели были вспомогательными приводами, которые конструировались для применения в станках. Впрочем, своим названием серводвигатель обязан латинскому слову „servus“, что по-русски означает „слуга“. В качестве серводвигателей может использоваться асинхронный двигатель, синхронный двигатель или двигатель постоянного тока. То есть различие между этими двигателями заключается не в самом принципе привода, а только в их возможностях регулирования.
Какие серводвигатели существуют?
Серводвигатели можно разделить на синхронные и асинхронные. Но это всегда привод, работающий в условиях электронного регулирования положения, скорости или момента – либо комбинации этих параметров. При этом предъявляются очень высокие требования к динамике, диапазонам регулирования и/или к точности движения. Серводвигатели обычно применяются в сочетании с системами автоматизации и управления, например в упаковочных машинах.
Наше предложение: Синхронные и асинхронные серводвигатели
Асинхронные серводвигатели
Асинхронные серводвигатели подходят для применения в таких системах, где большие внешние моменты инерции нужно перемещать в установках и машинах, обеспечивая высокую надежность регулирования. Для этого SEW-EURODRIVE предлагает в серии двигателей DRL.. соответствующие решения для привода.
Синхронные серводвигатели
Синхронные серводвигатели – это приводы, в которых ротор с помощью закрепленных на нем постоянных магнитов синхронно приводится в движение вращающимся полем в статоре. Синхронный двигатель вращается синхронно подаваемой частоте вращающегося поля.
Этот вариант привода работает от преобразователя частоты, который обеспечивает подходящий, управляемый трехфазный ток. Для этого в ассортименте SEW-EURODRIVE есть различные исполнения. Оптимизированные серводвигатели серии CMP. . можно в зависимости от применения адаптировать к высокой динамике или высоким нагрузкам. Классические сферы применения – пищевая промышленность, строительство, автомобилестроение, упаковочная техника и деревообработка.
. можно в зависимости от применения адаптировать к высокой динамике или высоким нагрузкам. Классические сферы применения – пищевая промышленность, строительство, автомобилестроение, упаковочная техника и деревообработка.
Основной особенностью синхронных серводвигателей серии CM..являются оптимальные характеристики регулирования, высокий вращающий момент и динамика. Эти двигатели идеально подходят для применения в логистике, например в качестве приводов портальных подъемников или стеллажных кранов-штабелеров.
Синхронные и асинхронные электродвигатели: в чём разница?
В основе классификации электродвигателей на синхронный и асинхронный тип лежит конструкция мотора и особенности ротора. Так, синхронные функционируют на переменном источнике тока, а частота вращения ротора совпадает с частотой магнитного поля. Электродвигатели асинхронные иногда называют индукционными, и у них частота магнитного поля и вращений ротора не совпадают.
Особенности конструкции синхронных и асинхронных электродвигателей
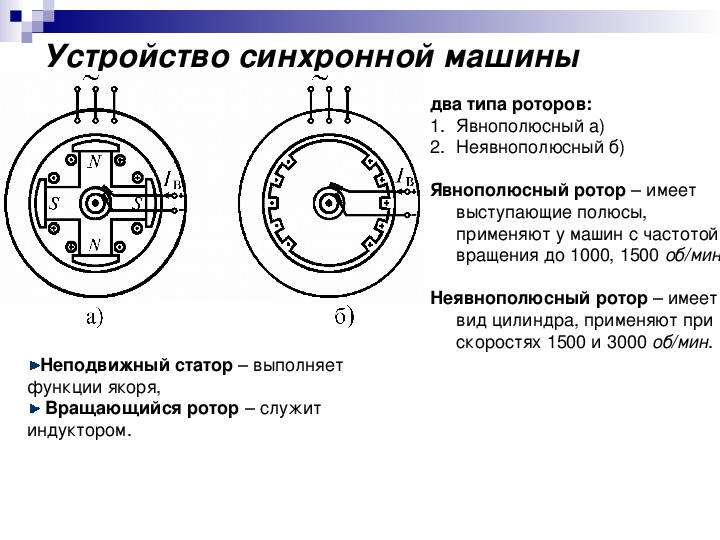
В синхронных электродвигателях ключевые элементы — это индуктор и якорь. Индуктор располагается на роторе и имеет два полюса — постоянные магниты. Якорь находится на стартере, представлен одной или несколькими обмотками. Благодаря такой конструкции, синхронные двигатели могут функционировать как генераторы и как электродвигатели.
Индуктор располагается на роторе и имеет два полюса — постоянные магниты. Якорь находится на стартере, представлен одной или несколькими обмотками. Благодаря такой конструкции, синхронные двигатели могут функционировать как генераторы и как электродвигатели.
Главные конструктивные элементы асинхронных двигателей — магнитопровод и обмотка. Также в строении устройств есть ротор и статор, и другие элементы, влияющие на прочность и эффективность работы.
Отличия синхронного двигателя от асинхронного
Первое отличие — это соотношение частот вращения ротора с магнитным полем. В синхронных агрегатах эти показатели равные, а в асинхронных — отличаются. Второй тип, к слову, встречается гораздо чаще и имеет больше модификаций. Связано это с явными преимуществами асинхронных электродвигателей:
- невысокая стоимость;
- простота эксплуатации;
- надёжность;
- может работать без преобразователей, на собственных ресурсах сети.
Но асинхронные двигатели не лишены и недостатков:
- имеют большой пусковой ток и маленький пусковой момент;
- у них пониженный коэффициент мощности;
- низкая управляемость.


Среди достоинств синхронных устройств выделим следующие:
- стабильность вращения независимо от нагрузок на ротор;
- не сильно чувствительны к перепадам напряжения.
Недостатками синхронных двигателей можно считать сложность конструкции и пуска в ход ротора.
Из всего вышесказанного можно сделать вывод, что асинхронные типы целесообразно использовать для двигателей, мощностью от 100 кВт. В остальных случаях проще обойтись асинхронными агрегатами.
Какие бывают двигатели? Типы электродвигателей. Асинхронные двигатели
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.
Простой двигатель имеет 2 положения ротора (2 «мёртвые точки»), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные — электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.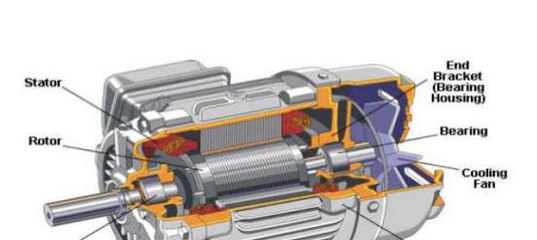
Бесколекторные — замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).
Синхронный — двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный — двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин — индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.
Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.
Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.
Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.
Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.
Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.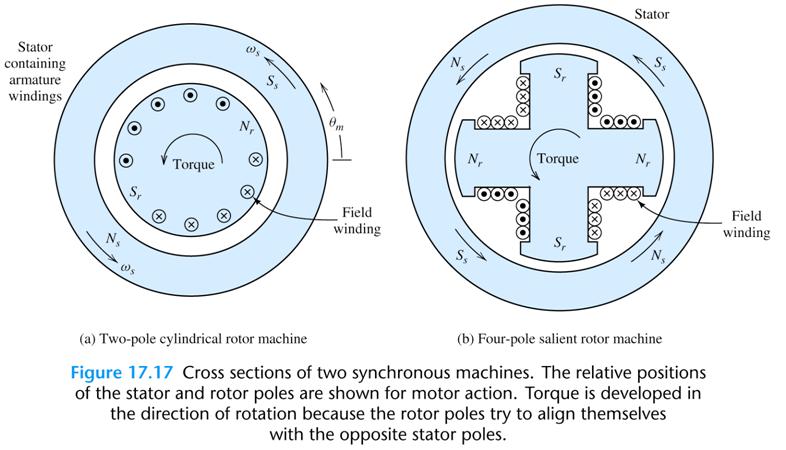
Асинхронные двигатели — MirMarine
Асинхронными называются двигатели, у которых число оборотов ротора отстает от скорости вращения магнитного поля статора при прохождении в его обмотках трехфазного тока. При прохождении в обмотках статора трехфазной машины трехфазного тока возникает вращающееся магнитное поле, под действием которого в роторе индуктируется электрический ток. В результате взаимодействия вращающегося магнитного поля статора стоками, индуктируемыми в проводниках ротора, возникает механическое усилие, действующее на проводник с током, которое и создает вращающий момент, приводящий в движение ротор. При этом число оборотов ротора у асинхронного двигателя всегда меньше числа оборотов вращающегося магнитного поля статора за счет скольжения ротора, которое у современных двигателей составляет примерно 2—5%.
Таким образом, асинхронный двигатель получает энергию, подводимую к ротору вращающимся магнитным потоком (индуктивно) в отличие от двигателей постоянного тока, у которых энергия подводится по проводам.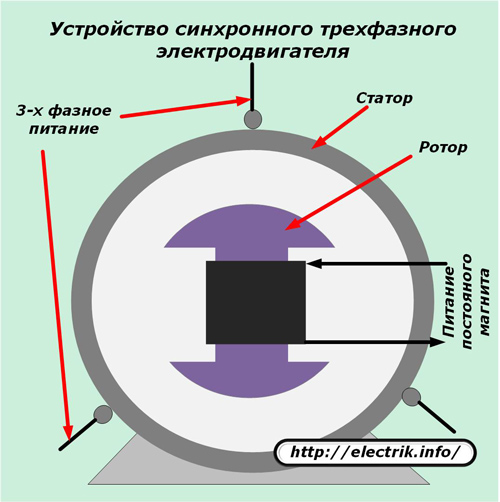
Асинхронные двигатели в отличие от синхронных возбуждаются переменным током.
Асинхронный двигатель, так же как и синхронный, состоит из двух основных частей: статора с фазными обмотками, по которым проходит трехфазный переменный ток, и ротора, ось которого уложена в подшипниках. Ротор может быть коротко-замкнутым и фазным (рис. 175).
Короткозамкнутый ротор(рис. 175, в) представляет из себя цилиндр, по окружности которого параллельно его оси расположены проводники, замкнутые между собой с обеих сторон ротора кольцами (в виде беличьего колеса).
Асинхронный двигатель с таким ротором называется короткозамкнутым. К недостаткам их относятся малый пусковой момент и большой ток в обмотках статора при пуске. Если хотят увеличить пусковой момент или уменьшить пусковой ток, применяют асинхронные двигатели с фазным ротором (рис. 175,г).
У этих двигателей на роторе размещают такую же обмотку, как и на статоре. При этом концы обмоток соединяют с контактными кольцами (рис. 175, д), расположенными на валу двигателя. Контактные кольца при помощи щеток соединяются с пусковым реостатом. Для пуска двигателя в питающую сеть включают статор, после чего постепенно выводят из цепи ротора сопротивление пускового реостата. Когда двигатель пущен в ход, контактные кольца при помощи особых приспособлений замыкаются накоротко, а щетки поднимаются над кольцами. Остановка электродвигателя производится простым выключением рубильника. После остановки двигателя необходимо опустить щетки и разомкнуть контактные кольца. На рис. 176 показан продольный разрез асинхронного двигателя с фазным ротором. На валу 1 двигателя имеется механизм для замыкания контактных колец 8 и подъема щеток ручкой 7. В корпусе 6 статора помещена обмотка 5, уложенная в пазы 4 стали статора. В пазах 2 стали ротора лежит обмотка 3 ротора.
При этом концы обмоток соединяют с контактными кольцами (рис. 175, д), расположенными на валу двигателя. Контактные кольца при помощи щеток соединяются с пусковым реостатом. Для пуска двигателя в питающую сеть включают статор, после чего постепенно выводят из цепи ротора сопротивление пускового реостата. Когда двигатель пущен в ход, контактные кольца при помощи особых приспособлений замыкаются накоротко, а щетки поднимаются над кольцами. Остановка электродвигателя производится простым выключением рубильника. После остановки двигателя необходимо опустить щетки и разомкнуть контактные кольца. На рис. 176 показан продольный разрез асинхронного двигателя с фазным ротором. На валу 1 двигателя имеется механизм для замыкания контактных колец 8 и подъема щеток ручкой 7. В корпусе 6 статора помещена обмотка 5, уложенная в пазы 4 стали статора. В пазах 2 стали ротора лежит обмотка 3 ротора.
Пуск в ход электродвигателя с короткозамкнутым ротором может быть осуществлен непосредственным включением рубильника на полное рабочее напряжение сети (способ прямого пуска. ) Однако вследствие резкого возрастания индуктируемой э. д. с. и величины пускового тока напряжение в сети в пусковой момент снижается, что отрицательно сказывается на работе приводного двигателя и других потребителей, питающихся от этой сети. В случае большой величины пускового тока, для его уменьшения асинхронные двигатели с короткозамкнутым ротором обычно пускают двумя способами: переключением обмоток статора в момент пуска со звезды на треугольник, если обмотки статора при нормальной работе электродвигателя соединены треугольником или включением электродвигателя через пусковое сопротивление (или автотрансформатор) в цепи статора.
) Однако вследствие резкого возрастания индуктируемой э. д. с. и величины пускового тока напряжение в сети в пусковой момент снижается, что отрицательно сказывается на работе приводного двигателя и других потребителей, питающихся от этой сети. В случае большой величины пускового тока, для его уменьшения асинхронные двигатели с короткозамкнутым ротором обычно пускают двумя способами: переключением обмоток статора в момент пуска со звезды на треугольник, если обмотки статора при нормальной работе электродвигателя соединены треугольником или включением электродвигателя через пусковое сопротивление (или автотрансформатор) в цепи статора.
Остановка электродвигателя производится выключением рубильника. После остановки электродвигателя пусковой реостат или автотрансформатор полностью вводится. Скорость вращения асинхронных двигателей регулируют, изменяя сопротивление реостата, включенного в цепь ротора (у электродвигателей с фазным ротором) и переключением статорных обмоток для изменения числа пар полюсов (у электродвигателей с коротко-замкнутым ротором).
Изменение направления вращения асинхронных электродвигателей достигается изменением направления вращающегося магнитного поля статора путем переключения любых двух из трех фаз обмотки статора (с помощью проводов, соединяющих зажимы статорной обмотки с сетью) при помощи обычного двухполюсного переключателя.
Асинхронные двигатели
- просты по конструкции
- обладают по сравнению с двигателями постоянного тока меньшими габаритами и весом, вследствие чего он значительно дешевле
- более надежны в эксплуатации
- требуют меньшего внимания при обслуживании из-за отсутствия у них вращающегося коллектора и щеточного аппарата
- обладают более высоким к. п. д.
- аппаратура управления ими значительно проще и дешевле, чем у двигателей постоянного тока
- Асинхронные двигатели работают без искрообразования, которое возможно в машинах постоянного тока с нарушенной коммутацией, поэтому они более безопасны в пожарном отношении.

Перечисленными основными преимуществами асинхронных двигателей объясняется современная тенденция повсеместного внедрения переменного тока на морских судах. Следует отметить, что в промышленности асинхронные двигатели давно завоевали господствующее положение по сравнению с другими типами электродвигателей. Асинхронные двигатели строятся мощностью от долей киловатта до многих тысяч киловатт. На судах морского флота в основном применяются асинхронные двигатели с короткозамкнутым ротором, которые выпускаются в водозащищенном и брызгозащищенном исполнении и рассчитаны на напряжение 380/220 в.
Разработка энергоэффективых электродвигателей и генераторов
Контакты: Прахт Владимир Алексеевич
7(343) 375-45-64
+7 909 028 49 25
Синхронные реактивные электродвигатели
Повышение энергоэффективности асинхронных двигателей до класса энергоэффективности IE3 (стандарт IEC 60034-30) и выше обеспечивается за счет применения литой медной обмотки вместо алюминиевой, что значительно усложняет технологию производства ротора и увеличивает стоимость двигателя.![]() Подобные асинхронные двигатели выпускают ведущие зарубежные производители.
Подобные асинхронные двигатели выпускают ведущие зарубежные производители.
В последние годы на рынке появились энергоэффективные двигатели (класса IE3 и IE4) новых конструкций. Одной из машин такого типа является синхронный реактивный двигатель. Технология производства синхронных реактивных двигателей не требует применения дорогостоящих материалов (например, постоянных магнитов) или выполнения сложных технологических операций. Основное отличие синхронных реактивных двигателей от асинхронных – отсутствие литой обмотки. Ротор синхронного реактивного двигателя состоит из листов ламинированной стали. За счет этого синхронный реактивный двигатель превосходит асинхронный по технологичности изготовления и себестоимости.
В институте проводятся исследования и разработки высокоэффективных и экономичных синхронных двигателей и способов их применения.
Электрические машины из порошковых композиционных магнитомягких материалов
В настоящее время отработаны технологии производства порошковых композиционных магнитомягких материалов (ПКММ) на основе порошкообразного железа, не уступающих по характеристикам изотропной динамной стали. Эти ПКММ могут применяться в электромеханике.
Эти ПКММ могут применяться в электромеханике.
При изготовлении электрических машин из ПКММ с использованием технологии пресс-формования обеспечивается безотходное производство и тем самым существенно снижается себестоимость продукции. Использование ПКММ позволяет изготавливать электрические машины новых конструкций, в которых отсутствуют лобовые части обмотки, лучше используется объем магнитопровода статора. Это позволяет снизить массогабаритные характеристики и повысить энергоэффективность машины.
В институте проводятся исследования и научное сопровождение разработок электрических машин новых конструкций из порошковых композиционных магнитомягких материалов.
Электродвигатели с обмоткой возбуждения на статоре
В институте проводятся исследования и разработки электродвигателей с повышенными энергосберегающими и улучшенными стоимостными характеристиками на базе конструкции с обмоткой возбуждения на статоре.
Однофазный электродвигатель с обмоткой возбуждения на статоре по сравнению с трехфазным асинхронным двигателем имеет более простой и надежный ротор, не требующий балансировки даже при разработке высокосортных приложений, существенно простой и дешевый блок управления электродвигателем, хорошие массогабаритные показатели.
Однофазный электродвигатель с обмоткой возбуждения на статоре по сравнению с вентильным реактивным электродвигателем имеет следующие преимущества: простой и дешевый инвертор (преобразователь частоты) для управления электродвигателем, меньшие пульсации момента, лучший гармонический состав, удовлетворяет требованиям по электромагнитной совместимости без применения корректора коэффициента мощности.
Двигатель с обмоткой возбуждения на статоре и инвертор может быть спроектирован для питания от однофазной и трехфазной сети. Возможно также исполнение двигателя с обмоткой возбуждения на статоре в трехфазном исполнении.
Бесщеточные электродвигатели для электроинструмента
В производстве электроинструмента используются ненадежные щеточные электродвигатели, дорогие вентильные двигатели с магнитами на роторе, тяжелые и большие по габаритам электродвигатели без магнитов в конструкции.
Отработана конструкция однофазных бесщеточных электродвигателей, которая позволяет использовать предельно простой и надежный зубчатый ротор, выполненный из стали.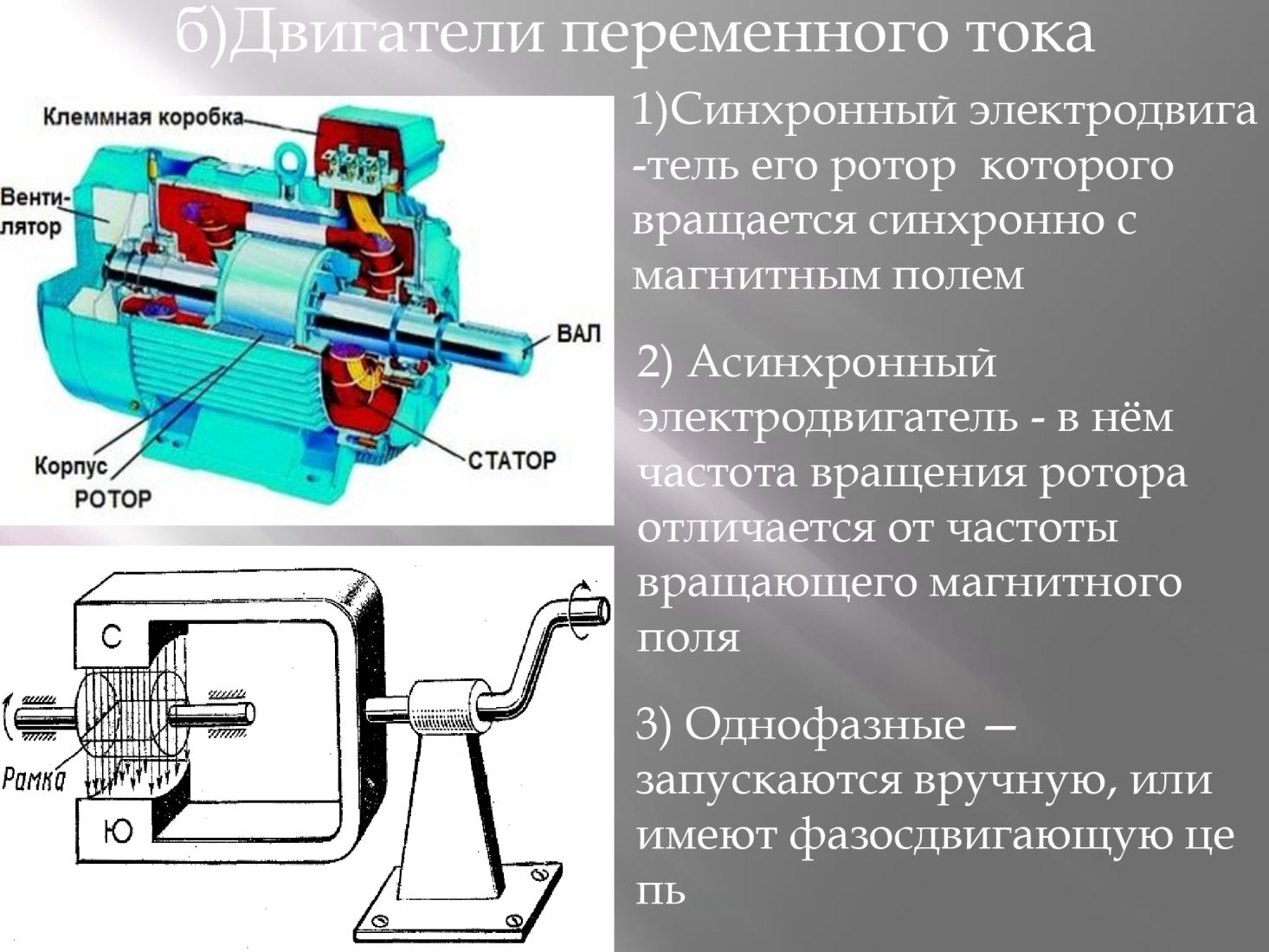
Размещение постоянных магнитов на неподвижном статоре обеспечивает высокую удельную мощность, низкую массу электродвигателя и повышенный ресурс работы. Применение в электроинструменте однофазных бесщеточных электродвигателей данной конструкции обеспечивает повышенный ресурс работы, более низкую цену электродвигателя, его массу и габариты, простой, сбалансированный и надежный ротор, высокие энергетические характеристики.
| Он всегда работает на синхронной скорости. Поэтому он называется синхронным. мотор. | Всегда работает со скоростью, немного меньшей синхронной скорости. Таким образом, он называется асинхронным двигателем. |
| Синхронный двигатель — машина двойного возбуждения, т. е. его якорь обмотка подключена к источнику переменного тока, а ее обмотка возбуждения возбуждается от источника постоянного тока. | Асинхронный двигатель представляет собой машину с однократным возбуждением, т.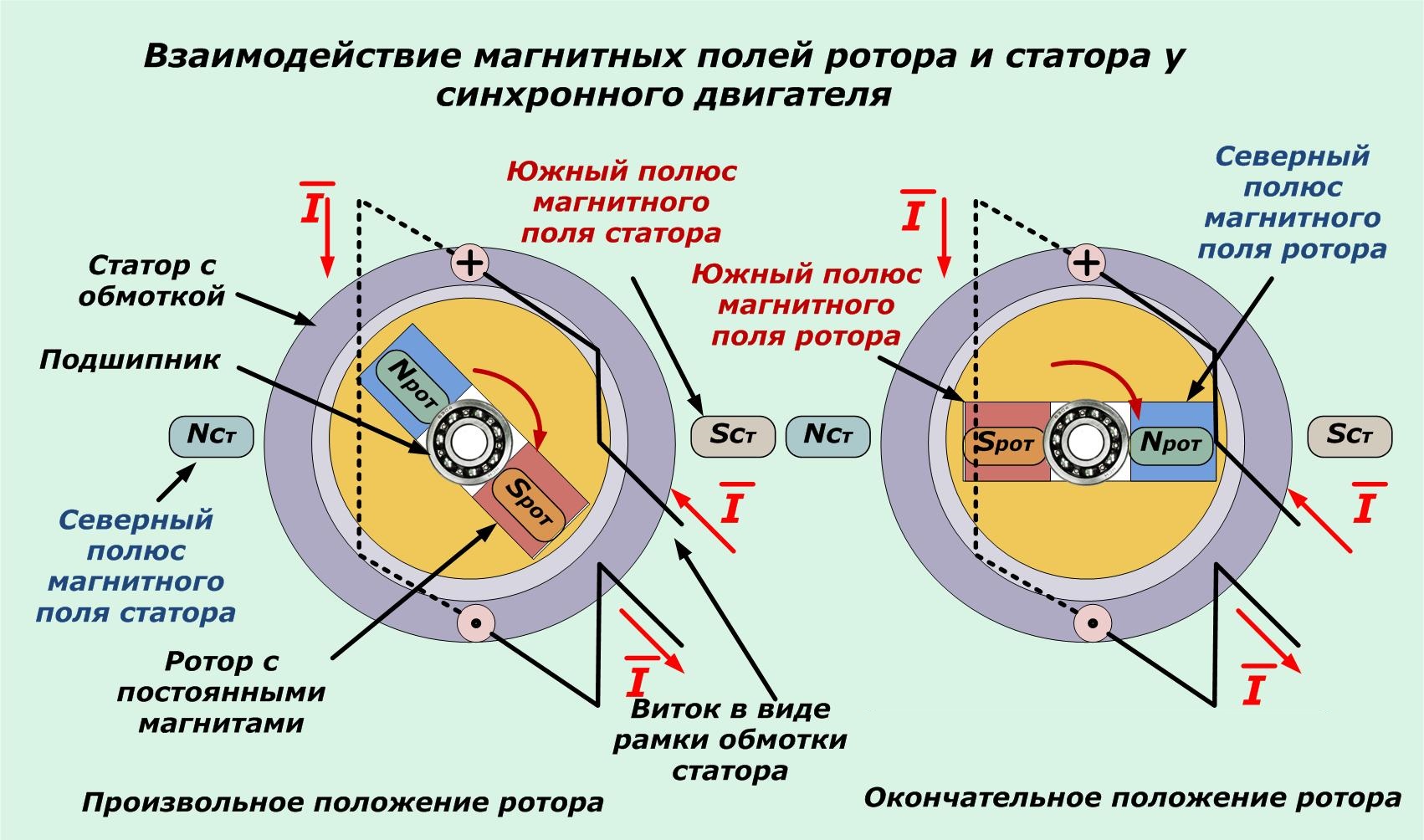 е. его статор е. его статоробмотка питается от источника переменного тока. |
| Скорость не зависит от нагрузки. | Скорость уменьшается с увеличением нагрузки. |
| Самозапуск невозможен. Для запуска требуются внешние средства. | Асинхронный двигатель имеет момент самозапуска. |
| Синхронный двигатель более эффективен, чем асинхронный двигатель того же номинала | КПД асинхронного двигателя меньше, чем у синхронного двигателя того же номинала. |
| Синхронный двигатель может работать в широком диапазоне коэффициентов мощности, как с опережением, так и с отставанием. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. |
| Коэффициент мощности синхронного двигателя можно изменить, изменив его возбуждение. | Коэффициент мощности асинхронного двигателя не регулируется. Он становится очень плохим (отстающим) при высоких нагрузках. |
| Отсутствие относительного движения между вращающимся магнитным полем статора (RMF) а ротор необходим для работы синхронного двигателя.  | Для работы асинхронного двигателя должен быть относительный движение между RMF статора и ротором. |
| Для того же номинала синхронный двигатель дороже, чем асинхронный мотор. | Асинхронный двигатель дешевле синхронного. |
| Синхронный двигатель имеет сложную конструкцию. | Асинхронный двигатель имеет более простую конструкцию, чем синхронный двигатель. |
| Синхронный двигатель имеет более высокий пусковой момент по сравнению с асинхронным двигателем. | Асинхронный двигатель имеет меньший пусковой момент. |
| Синхронные двигатели экономичны при скоростях ниже 300 об/мин. | Асинхронные двигатели экономичны при скорости выше 600 об/мин. |
| Синхронные двигатели требуют возбуждения постоянного тока на роторе. | Асинхронные двигатели не требуют возбуждения ротора. |
Применение — Привод механических нагрузок с постоянной скоростью, коррекция коэффициента мощности электрических систем и т. д. д. | Применение — Асинхронные двигатели используются только для привода механических нагрузок. |
Разница между синхронным двигателем и асинхронным двигателем
Двигатели переменного тока
делятся на два типа: синхронные двигатели и асинхронные двигатели, которые также называются асинхронными двигателями.Самая большая разница между синхронными двигателями и асинхронными двигателями (асинхронными двигателями) заключается в том, соответствует ли скорость ротора скорости вращающегося магнитного поля в статоре. Если скорость вращения ротора и скорость возбуждения статора одинаковы, такой двигатель называется синхронным; если нет, то это асинхронный двигатель. Кроме того, между ними существуют большие различия в параметрах производительности и приложениях.
Различие в конструкции
Обмотки статора синхронных и асинхронных двигателей одинаковы, и основное различие заключается в конструкции ротора. В роторе синхронного двигателя имеются обмотки возбуждения постоянного тока, которые необходимо обеспечить внешней мощностью возбуждения, вводимой через токосъемное кольцо. Однако обмотки ротора асинхронного двигателя короткозамкнуты, что создает ток за счет электромагнитной индукции. Напротив, синхронные двигатели более сложны и дороги.
В роторе синхронного двигателя имеются обмотки возбуждения постоянного тока, которые необходимо обеспечить внешней мощностью возбуждения, вводимой через токосъемное кольцо. Однако обмотки ротора асинхронного двигателя короткозамкнуты, что создает ток за счет электромагнитной индукции. Напротив, синхронные двигатели более сложны и дороги.
- Статор
Компоненты статора синхронного двигателя в основном такие же, как и у асинхронных двигателей, играя роль приема, вывода электроэнергии и создания вращающегося магнитного поля.В форме результата особой разницы нет. Статоры как синхронного двигателя, так и асинхронного двигателя состоят из магнитного сердечника статора, токопроводящих трехфазных обмоток переменного тока, основания к фиксирующему сердечнику, клеммной крышки и т. д. - Ротор
Синхронный двигатель: сердечник полюса ротора ламинирован стальными листами, которые пробиты стальными пластинами. На сердечник полюса надеты обмотки возбуждения, намотанные изолированными медными проводами. Для синхронного двигателя с постоянными магнитами постоянный магнит на роторе является ключевым фактором, отличающим его от других двигателей.
Асинхронный двигатель: ротор состоит из железного сердечника и обмоток, изготовлен из ламинированных стальных листов и установлен на вращающемся валу. Существует два типа ротора: с короткозамкнутым ротором и с обмоткой. Асинхронный двигатель обмотки также оснащен контактным кольцом и щеточным механизмом.
 Для синхронного двигателя с постоянными магнитами постоянный магнит на роторе является ключевым фактором, отличающим его от других двигателей.
Для синхронного двигателя с постоянными магнитами постоянный магнит на роторе является ключевым фактором, отличающим его от других двигателей. Отличие от Рабочий
1. Синхронный двигатель
Синхронный двигатель вращается за счет взаимодействия между вращающимся магнитным полем, создаваемым обмотками статора при включении, и магнитным полем, создаваемым ротором.Для синхронного двигателя с постоянными магнитами он вращается за счет крутящего момента, создаваемого взаимодействием между вращающимся магнитным полем статора и вторичным магнитным полем ротора. Что касается обмотки ротора, то она не индуцирует ток при нормальном вращении двигателя и также не участвует в работе. Он служит только для запуска двигателя.
Он служит только для запуска двигателя.
При установившейся работе синхронного двигателя существует постоянная зависимость между скоростью вращения ротора и частотой сети:
N = Ns = 120f / p
f — частота сети, p — число полюсов двигателя, Ns — синхронная скорость.
2. Асинхронный двигатель
В сердечник статора трехфазного асинхронного двигателя встроены трехфазные симметричные обмотки. После включения питания между статором и ротором возникает вращающееся магнитное поле, которое вращается с синхронной скоростью. Стержень ротора разрезается вращающимся магнитным полем, в котором возникает индуцированный ток. Включающий стержень ротора подвергается действию электромагнитной силы во вращающемся магнитном поле, при этом ротор преодолевает вращение момента нагрузки и ускоряет свое вращение.Когда электромагнитный момент равен моменту нагрузки, двигатель вращается с постоянной скоростью.
Скорость вращения асинхронного двигателя (скорость статора) меньше, чем скорость вращения магнитного поля, и эта разница называется «скольжением» и выражается в процентах от синхронной скорости:
S = (Ns-N) / Ns.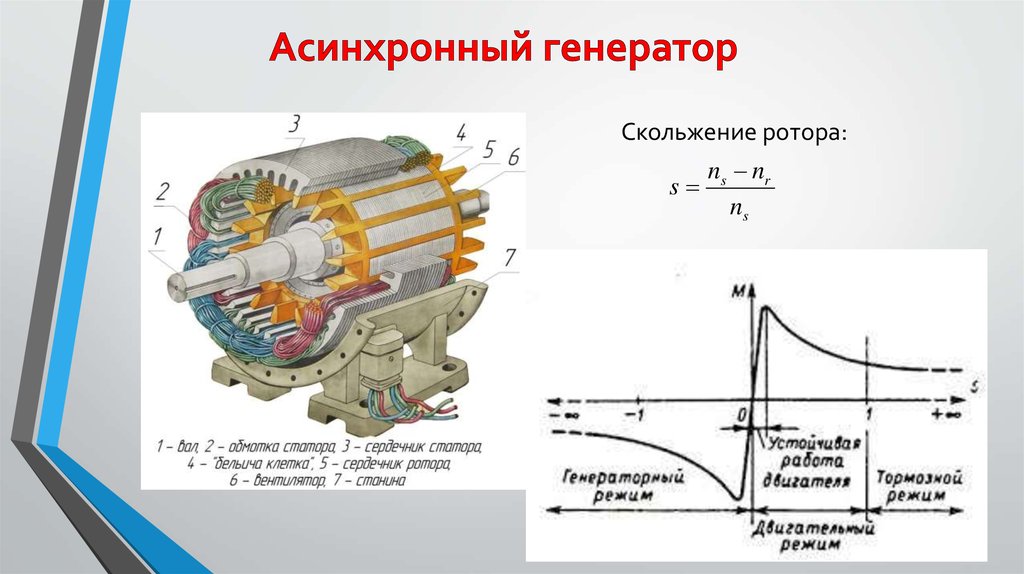
S — скольжение, Ns — скорость магнитного поля, N — скорость вращения ротора.
Различия в Области применения
Синхронные двигатели в основном используются в больших генераторах, а асинхронные двигатели почти используются в качестве двигателей для привода машин.
Коэффициент мощности синхронного двигателя можно гибко регулировать с помощью возбуждения. Однако коэффициент мощности асинхронного двигателя не регулируется, поэтому на некоторых крупных заводах для более применяемых асинхронных двигателей синхронный двигатель может быть добавлен в качестве модификатора фазы для регулировки коэффициентов мощности завода и интерфейса сети. Однако из-за высокой стоимости синхронных двигателей и большого объема технического обслуживания в настоящее время для компенсации коэффициента мощности обычно используются конденсаторы.
Работа синхронного двигателя не так проста, как у асинхронного двигателя, потому что синхронный двигатель имеет обмотку возбуждения и токосъемное кольцо, требующие высокоуровневого управления возбуждением. Кроме того, по сравнению с необслуживаемым асинхронным двигателем работа по обслуживанию синхронного двигателя велика. Поэтому в качестве двигателя асинхронный двигатель является наиболее предпочтительным.
Кроме того, по сравнению с необслуживаемым асинхронным двигателем работа по обслуживанию синхронного двигателя велика. Поэтому в качестве двигателя асинхронный двигатель является наиболее предпочтительным.
Разница между синхронным и асинхронным двигателем
Ключевое отличие: Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока. В синхронном электродвигателе вращение вала синхронизировано с частотой питающего тока.Асинхронный двигатель представляет собой электродвигатель переменного тока, в котором электрический ток в роторе создается за счет электромагнитной индукции от магнитного поля обмотки статора.
Синхронные и асинхронные двигатели представляют собой два разных типа электродвигателей переменного тока. Электродвигатели переменного тока представляют собой электродвигатели, приводимые в движение переменным током (AC). Двигатель переменного тока обычно состоит из двух основных частей: внешнего неподвижного статора и внутреннего ротора.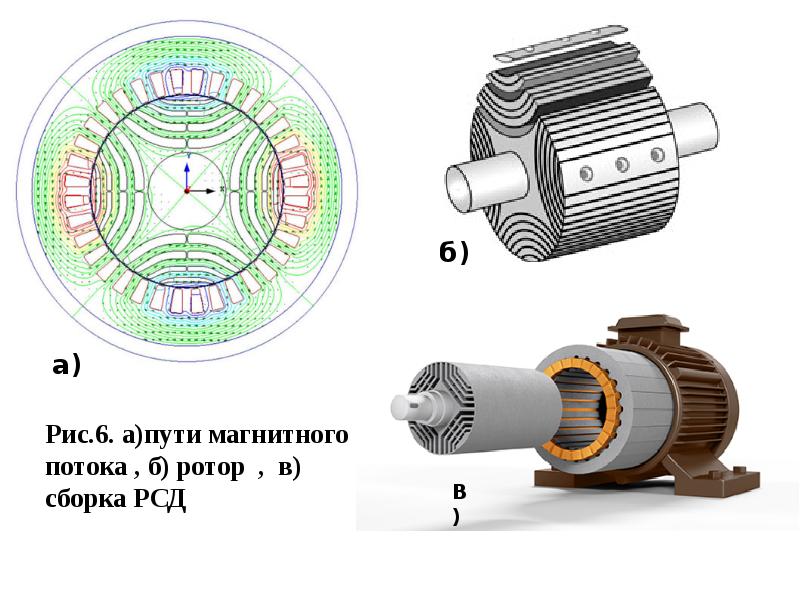 Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока.
Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока.
Внешний неподвижный статор имеет катушки, на которые подается переменный ток. Это создает вращающееся магнитное поле. Внутренний ротор прикреплен к выходному валу, который создает второе вращающееся магнитное поле. Магнитное поле ротора может создаваться постоянными магнитами, сопротивлением магнитного поля или электрическими обмотками постоянного или переменного тока.
В синхронном электродвигателе вращение вала синхронизировано с частотой питающего тока. Период вращения точно равен целому числу циклов переменного тока.Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя. Эти электромагниты создают магнитное поле, которое вращается в такт колебаниям линейного тока. С другой стороны, ротор с постоянными магнитами или электромагнитами вращается в соответствии с полем статора с той же скоростью. Это обеспечивает второе синхронизированное вращающееся магнитное поле.
Асинхронный двигатель представляет собой электродвигатель переменного тока, в котором электрический ток в роторе создается за счет электромагнитной индукции от магнитного поля обмотки статора.Асинхронный двигатель также известен как асинхронный двигатель. Ротор в асинхронном двигателе может быть как с обмоткой, так и с короткозамкнутым ротором.
В отличие от больших синхронных двигателей, асинхронный двигатель не требует механической коммутации, раздельного возбуждения или самовозбуждения для передачи энергии от статора к ротору.
Основное различие между синхронными и асинхронными двигателями заключается в том, что синхронный двигатель вращается точно синхронно с частотой сети. Кроме того, синхронный двигатель не зависит от индукции тока для создания магнитного поля ротора.Асинхронный двигатель, с другой стороны, требует «скольжения», чтобы индуцировать ток в обмотке ротора, что означает, что ротор должен вращаться немного медленнее, чем чередование переменного тока.
Сравнение синхронного и асинхронного двигателя:
| Синхронный двигатель | Асинхронный двигатель |
Описание | Синхронный электродвигатель представляет собой двигатель переменного тока, в котором в установившемся режиме вращение вала синхронизировано с частотой питающего тока. | Асинхронный или асинхронный двигатель представляет собой электродвигатель переменного тока, в котором электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции из магнитного поля обмотки статора. |
Содержат | Многофазные электромагниты переменного тока на статоре двигателя |
|
Синхронная скорость | Работать при об/мин=120f/p | Работа на скорости ниже синхронной (об/мин=120f/p – скольжение) |
Возбуждение постоянным током | Синхронные двигатели требуют подачи возбуждения постоянного тока на обмотки ротора | Асинхронные двигатели не требуют подачи возбуждения постоянного тока на обмотки ротора |
Источник питания постоянного тока | Синхронным двигателям требуется источник питания постоянного тока для возбуждения ротора. | Асинхронным двигателям не требуется источник питания постоянного тока для возбуждения ротора. |
Возбуждение ротора | Для синхронных двигателей требуются контактные кольца и щетки для обеспечения возбуждения ротора. | Асинхронные двигатели не требуют контактных колец, но некоторые асинхронные двигатели имеют их для плавного пуска или регулирования скорости. |
Обмотки ротора | Для синхронных двигателей требуются обмотки ротора | Асинхронные двигатели чаще всего имеют токопроводящие стержни в роторе, которые закорочены на концах, образуя «беличью клетку». |
Пусковой механизм | Для синхронных двигателей требуется пусковой механизм в дополнение к режиму работы, который действует, когда они достигают синхронной скорости. | Трехфазные асинхронные двигатели можно запустить, просто подав питание, но для однофазных двигателей требуется дополнительная пусковая цепь. |
Коэффициент мощности | Коэффициент мощности синхронного двигателя можно отрегулировать так, чтобы он был отстающим, единичным или опережающим. | Асинхронные двигатели всегда должны работать с отстающим коэффициентом мощности. |
Эффективность | Синхронные двигатели, как правило, более эффективны, чем асинхронные двигатели. | Асинхронные двигатели обычно менее эффективны, чем синхронные двигатели. |
Слип | Синхронные двигатели могут быть сконструированы с постоянными магнитами в роторе, исключая контактные кольца, обмотки ротора, систему возбуждения постоянного тока и возможность регулировки коэффициента мощности. | Асинхронные двигатели содержат проскальзывание. |
Размер | Синхронные двигатели обычно изготавливаются только мощностью более 1000 л. | Асинхронные двигатели меньшего размера обычно используются в быту. |
Используется в | Применения синхронизации, такие как синхронные часы, таймеры в бытовой технике, магнитофоны и прецизионные сервомеханизмы | Трехфазные асинхронные двигатели с короткозамкнутым ротором широко используются в промышленных приводах, поскольку они прочны, надежны и экономичны. Однофазные асинхронные двигатели широко используются для небольших нагрузок, таких как бытовые приборы, такие как вентиляторы. |


 с. (750 кВт) из-за их стоимости и сложности. Однако синхронные двигатели с постоянными магнитами и постоянные синхронные двигатели с электронным управлением, называемые бесщеточными двигателями постоянного тока, доступны в меньших размерах.
с. (750 кВт) из-за их стоимости и сложности. Однако синхронные двигатели с постоянными магнитами и постоянные синхронные двигатели с электронным управлением, называемые бесщеточными двигателями постоянного тока, доступны в меньших размерах.Различия между синхронными и асинхронными двигателями
Авг.16, 2021
Электродвигатель — это машина, которая преобразует электрическую энергию в механическую для выполнения механических операций.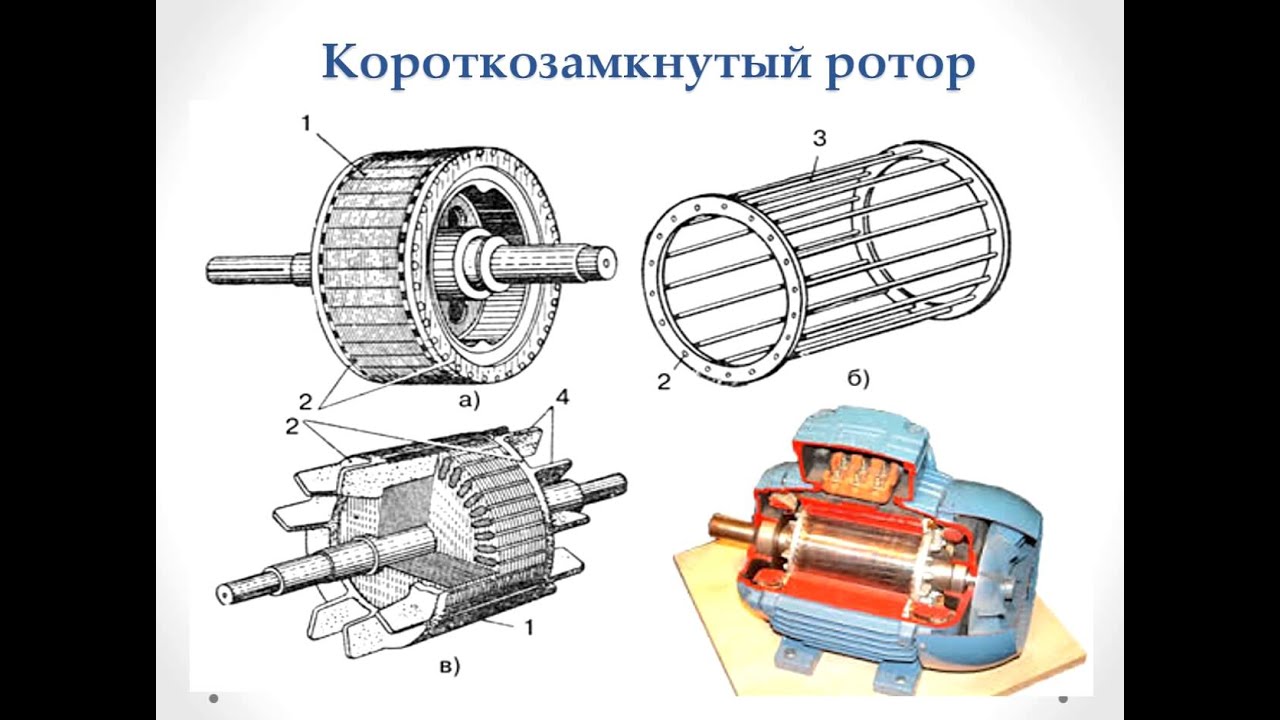 Есть два типа двигателей переменного тока; синхронные двигатели и асинхронные двигатели . Они оба имеют некоторые сходства, но очень разные по работе и производительности.
Есть два типа двигателей переменного тока; синхронные двигатели и асинхронные двигатели . Они оба имеют некоторые сходства, но очень разные по работе и производительности.
Как работают двигатели переменного тока?
Двигатель постоянного тока работает за счет магнитного поля, действующего на проводник с током, на который действуют механические силы.В случае двигателей переменного тока используется концепция RMF вращающегося магнитного поля. Статор состоит из нескольких обмоток, которые генерируют переменное магнитное поле при подаче входного переменного тока. Это магнитное поле вращается вокруг ротора.
Относительная разница между вращающимся полем статора и скоростью вращения ротора называется скольжением. Если двигатель имеет нулевое скольжение или если скорость вращения ротора такая же, как и вращающееся магнитное поле статора, двигатель называется синхронным двигателем переменного тока.Если двигатель переменного тока имеет скольжение или если есть разница между скоростью поля статора и ротора, двигатель называется асинхронным двигателем.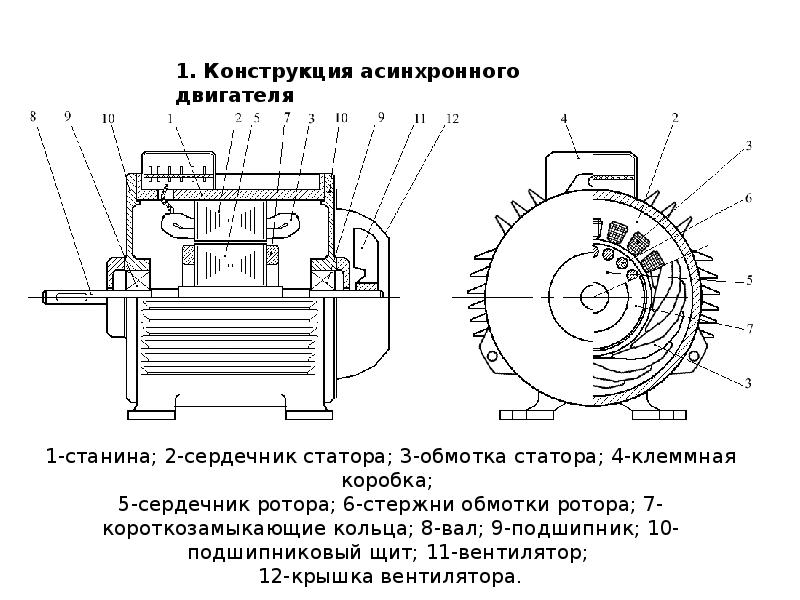
Синхронный двигатель
Как следует из названия, ротор синхронного двигателя имеет ту же скорость, что и вращающееся магнитное поле статора, что называется синхронной скоростью.
Статор создает вращающееся магнитное поле при питании от сети переменного тока. Ротор может быть спроектирован так, чтобы генерировать собственное магнитное поле с помощью внешнего источника питания постоянного тока через токосъемные кольца или с использованием постоянных магнитов .
Ротор предназначен для создания магнитных полюсов, равных или кратных полюсам статора. Когда статор и ротор находятся под напряжением, магнитное поле ротора связано с вращающимся полем статора и вращается с точной скоростью поля статора.
Ротор синхронного двигателя вращается с синхронной скоростью, зависящей от частоты источника питания и числа полюсов обмотки статора. Следовательно, скорость двигателя не зависит от нагрузки.Чтобы изменить скорость синхронного двигателя, необходимо изменить частоту питания.
Асинхронные двигатели
Название асинхронного двигателя подразумевает, что скорость вращения ротора не синхронизирована со скоростью вращения поля статора. Если быть точным, ротор асинхронного двигателя вращается с относительно меньшей скоростью, чем RMF статора. Это происходит из-за проскальзывания между скоростями его статора и ротора.
Ротор асинхронного двигателя представляет собой либо проволочный ротор с короткозамкнутым ротором.Ротор с короткозамкнутым ротором состоит из тяжелых медных стержней, соединенных на концах, которые электрически замкнуты друг на друга с помощью токопроводящих колец. Ротор с проволочной обмоткой состоит из нескольких обмоток поверх стального многослойного железного сердечника.
Вращающееся магнитное поле статора индуцирует индукционный ток в роторе. Этот индуцированный ток протекает внутри ротора и создает собственное магнитное поле. Поскольку он работает по принципу индукции, асинхронный двигатель также называют асинхронным двигателем.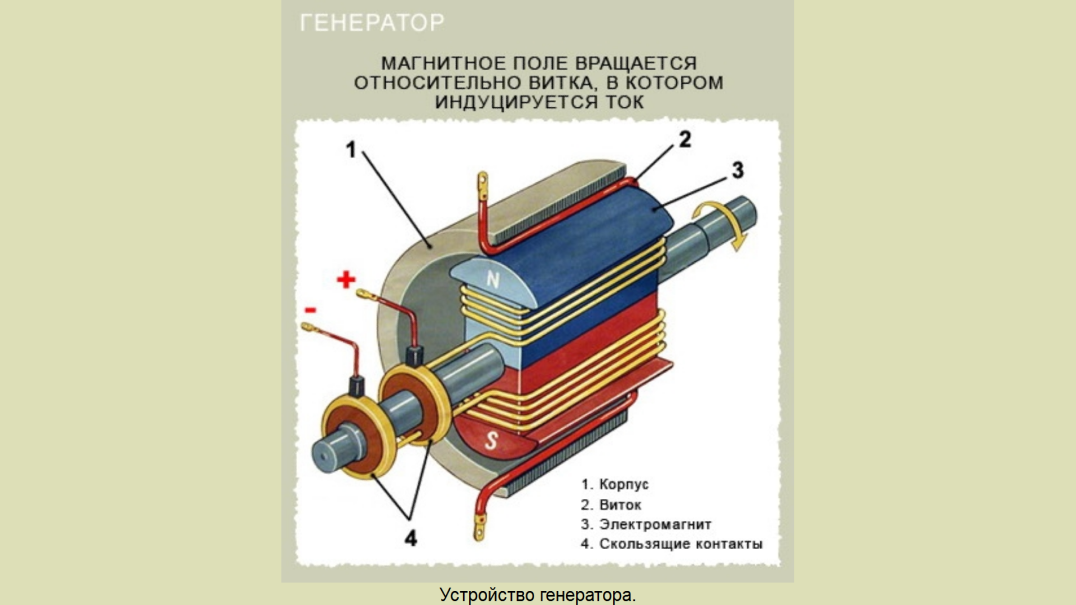 Асинхронные двигатели никогда не могут работать с синхронной скоростью, но всегда медленнее синхронной скорости, в зависимости от скорости нарастания двигателя.
Асинхронные двигатели никогда не могут работать с синхронной скоростью, но всегда медленнее синхронной скорости, в зависимости от скорости нарастания двигателя.
Можно сделать вывод, что синхронные двигатели более эффективны, но более дороги и используются для сверхнизких скоростей, обеспечивая при этом коррекцию коэффициента мощности. С другой стороны, асинхронные двигатели используются для высокоскоростных приложений с переменной скоростью, при этом они недороги и просты в эксплуатации. Теперь вы можете связаться с нами , чтобы найти больше двигателей, у нас есть синхронный двигатель с постоянными магнитами, низковольтные двигатели с короткозамкнутым ротором и так далее.
Разница между синхронным и асинхронным двигателем переменного тока: подробное руководство
Двигатель, который преобразует переменный ток в механическую энергию с помощью явления электромагнитной индукции, называется двигатель переменного тока . В основном двигатель переменного тока подразделяется на два типа. Это синхронный двигатель переменного тока и асинхронный двигатель переменного тока. В этом блоге мы говорим о разнице между синхронным и асинхронным двигателем переменного тока с помощью различных факторов, таких как тип возбуждения, используемый для машины.Скорость двигателя, пусковой механизм и работа, эффективность обоих двигателей, их стоимость, использование и применение.
В основном двигатель переменного тока подразделяется на два типа. Это синхронный двигатель переменного тока и асинхронный двигатель переменного тока. В этом блоге мы говорим о разнице между синхронным и асинхронным двигателем переменного тока с помощью различных факторов, таких как тип возбуждения, используемый для машины.Скорость двигателя, пусковой механизм и работа, эффективность обоих двигателей, их стоимость, использование и применение.
1. Синхронный двигатель переменного тока
Двигатель, который преобразует электрическую энергию переменного тока в механическую энергию и работает только на синхронной скорости, называется синхронным двигателем.
В этом двигателе статор имеет осевые пазы, которые состоят из обмотки статора, намотанной на определенное количество полюсов. Как правило, ротор с явными полюсами использует обмотку ротора.Обмотка ротора питается от источника постоянного тока с помощью контактных колец. Можно также использовать ротор с постоянными магнитами.
При подаче питания на синхронный двигатель устанавливается вращающееся поле. Это поле пытается увлечь за собой ротор, но из-за инерции ротора он не может вращаться. Следовательно, cit не создает никакого пускового момента. Таким образом, синхронный двигатель не является самозапускающимся двигателем.
2. Асинхронный или асинхронный двигатель переменного тока
Машина, которая преобразует электрическую энергию переменного тока в механическую энергию с помощью явления электромагнитной индукции, называется асинхронным двигателем.Асинхронный двигатель подразделяется на два типа
- Однофазный асинхронный двигатель
- Трехфазные асинхронные двигатели.
В асинхронной машине обмотка якоря служит как обмоткой якоря, так и обмоткой возбуждения. Когда обмотки статора подключаются к источнику переменного тока, поток создается в воздушном зазоре. Поток вращается с фиксированной скоростью, называемой синхронной скоростью. Этот вращающийся поток индуцирует напряжения в обмотках статора и ротора. Асинхронный двигатель также известен как асинхронный двигатель , потому что он никогда не работает на синхронной скорости.т. е. N s = 120f/P. Асинхронный двигатель наиболее широко используется во всех бытовых и коммерческих двигателях.
Этот вращающийся поток индуцирует напряжения в обмотках статора и ротора. Асинхронный двигатель также известен как асинхронный двигатель , потому что он никогда не работает на синхронной скорости.т. е. N s = 120f/P. Асинхронный двигатель наиболее широко используется во всех бытовых и коммерческих двигателях.
Здесь обмотка статора намотана на определенное количество полюсов. Можно использовать ротор с короткозамкнутым ротором или ротор с обмоткой. В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко концевыми кольцами. В фазном роторе обмотки также постоянно закорочены, поэтому контактные кольца не требуются. Если цепь ротора замкнута, ток протекает через обмотку ротора и реагирует с вращающимся потоком, создавая крутящий момент.В соответствии с крутящим моментом скорость будет меняться.
СВЯЗАННЫЕ ЗАПИСЬ В БЛОГЕ О ДВИГАТЕЛЕ ПЕРЕМЕННОГО ТОКА
Разница между синхронным и асинхронным двигателем переменного тока
Параметры | Синхронный двигатель переменного тока | Асинхронный двигатель переменного тока |
| Система снабжения | Обмотка якоря питается от источника переменного тока, а обмотка возбуждения — от источника постоянного тока. | Обмотка статора питается от источника переменного тока. |
| Виды возбуждения | Синхронный двигатель представляет собой машину с двойным возбуждением. | Асинхронный двигатель представляет собой машину с одним возбуждением. |
| Скорость | Он всегда работает на синхронной скорости. Скорость не зависит от нагрузки. | Если нагрузка увеличивается, скорость асинхронного двигателя уменьшается.Она всегда меньше синхронной скорости. |
| Пусковой механизм | Самостоятельный запуск невозможен. Прежде чем синхронизировать его с источником переменного тока, его необходимо любым способом довести до синхронной скорости. | Асинхронный двигатель имеет момент самозапуска. |
| Эксплуатация | Синхронный двигатель работает с отставанием и опережением мощности за счет изменения возбуждения. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. При высоких нагрузках коэффициент мощности становится очень низким. |
| Использование | Используется для коррекции коэффициента мощности в дополнение к передаче крутящего момента для привода механических нагрузок. | Асинхронный двигатель используется только для привода механических нагрузок. |
| Эффективность | Он более эффективен, чем асинхронный двигатель той же мощности и номинального напряжения. | КПД ниже, чем у синхронного двигателя той же мощности и номинального напряжения. |
| Строительство | Конструкция сложная | Конструкция ротора с короткозамкнутым ротором проще. |
| Стоимость | Синхронный двигатель дороже, чем асинхронный двигатель той же мощности и номинального напряжения | Асинхронный двигатель дешевле синхронного двигателя той же мощности и номинального напряжения. |



Мы надеемся, что эта статья поможет вам понять разницу между синхронным и асинхронным двигателем переменного тока.
Мы по адресу Robu.in надеемся, что вам было интересно, и вы вернетесь к нашим образовательным блогам.
Разница между синхронным двигателем и синхронным генератором
Здравствуйте, читатели приветствуют новый пост.В этом посте мы обсудим Разница между синхронным двигателем и синхронным генератором. Двигатель представляет собой устройство, которое используется для преобразования электрической энергии в механическую, а генератор используется для преобразования механической энергии в электрическую.
В этом посте мы узнаем некоторые основные различия между синхронным двигателем и синхронным генератором и найдем их связанные параметры. Итак, приступим.
Что такое синхронный двигатель
- Синхронный двигатель — это такой двигатель, в котором скорость вращения ротора идентична синхронной скорости, синхронная скорость — это скорость вращения магнитного поля, создаваемого на статоре двигателя.

- Статор двигателя является электромагнитным, который создает поле при подаче тока на статор, скорость вращения поля называется синхронной скоростью.
- также известен как с двойной подачей , потому что его ротор и статор подключены к входному питанию.
- Обычно используемые двигатели переменного тока представляют собой асинхронные и синхронные двигатели.
- Основное различие между этими двумя двигателями заключается в том, что синхронный двигатель вращается с постоянной скоростью, аналогичной скорости вращения поля статора.
- Ротор синхронного двигателя ведет себя как постоянный магнит или электромагнит, и его поле взаимодействует с полем статора, чем он вращается одновременно с вращением поля статора.
- В то время как в асинхронном двигателе требуется скольжение, это означает, что скорость вращения ротора меньше скорости вращающегося поля на статоре.
Синхронный двигатель
Что такое синхронный генератор
- Синхронный генератор также известен как генератор переменного тока, он преобразует механическую энергию в электрическую.
- Электроэнергия, которую мы используем в нашем доме или на производстве, в основном вырабатывается синхронным генератором.

- В мире существует много источников преобразования энергии, но большая часть энергии преобразуется синхронным генератором
Принцип работы синхронного генератора
- Работа синхронного генератора основана на законе электромагнитной индукции Фарадея.
ЭДС= dΦ/dt
- Этот закон гласит, что скорость изменения магнитного потока в любом устройстве будет производить ЭДС в этом устройстве.Если устройство статично, а поле вращается, оно также создаст поле в устройстве.
- В случае синхронного генератора ротор вращается и создает поле в статоре.
- Для понимания ЭДС, наводимой в любом устройстве, изучите статью о наведенном напряжении в петле
- Все эти 4 возможности этих машин показаны на данном рисунке в виде векторной диаграммы.

Эквивалентная схема синхронного двигателя
- Почти все аспекты синхронного двигателя, такие как конструкция и работа, аналогичны синхронному генератору, но разница заключается в том, что генератор преобразует механическую энергию в электрическую, а двигатель преобразует электрическую энергию в механическую.
Из-за этого направление потока мощности будет против потока мощности генератора, и ток также будет обратным. - Таким образом, эквивалентная схема синхронного двигателя будет аналогична эквивалентной схеме синхронного генератора, но направление тока IA будет противоположно генератору.
- Результирующая схема синхронного двигателя показана на данном рисунке.
- На этом рисунке показана эквивалентная схема двигателя по фазам.
- Если применить KVL (закон напряжения Кирхгофа) к эквивалентной схеме синхронного двигателя, то мы получим следующие уравнения.
Vø= EA + jXSIA + RAIA
EA = Vø – jXS IA – RAIA
Эти уравнения аналогичны уравнениям синхронных генераторов, но разница в том, что знак другой
Автор: Генри
//www. theengineeringknowledge.com
theengineeringknowledge.com
Я профессиональный инженер, выпускник известного инженерного университета, также имею опыт работы инженером в различных известных отраслях.Я также являюсь автором технического контента, мое хобби — исследовать новые вещи и делиться ими с миром. Через эту платформу я также делюсь своими профессиональными и техническими знаниями со студентами инженерных специальностей.
Почтовая навигация
С.но. | Синхронный двигатель | Асинхронный двигатель |
|---|---|---|
1. | Это не самозапуск. | Это самозапуск. |
2. | Строительство сложное. | Конструкция проста, особенно в случае двигателя с короткозамкнутым ротором. |
3.
| Он работает с постоянной скоростью, т. е. синхронной скоростью независимо от нагрузки. | Он не может работать на синхронной скорости. Скорость уменьшается по мере увеличения нагрузки. |
4. | Регулировка скорости невозможна. | Возможна регулировка скорости. |
5. | Это машина с двойным возбуждением и требует возбуждения постоянным током. | Это машина с однократным возбуждением и не требует возбуждения постоянным током. |
6. | Он может работать с широким диапазоном коэффициентов мощности как с опережением, так и с отставанием. | Он всегда работает с запаздывающим коэффициентом мощности. |
7. | Используется для питания механических нагрузок, а также для к.
|

