
Специальность 27.02.04 Автоматические системы управления(бюджетная и внебюджетная группа)
Автоматизированные системы управления технологическим процессом
Что включает в себя специальность АСУ ТП
Эта специальность, предполагает участие в создании современных программных продуктов для проектирования, автоматического контроля технологических процессов, диагностирования механизмов и оборудования для выпуска продукции, а также контроля показателей качества самой продукции с минимальным участием человека.
«Автоматические системы управления» — специальность, которая имеет дело с процессами проектирования и внедрения программ для систем управления и автоматики. Автоматизация — это автоматическое управление — не требует участия или действия человека. Для автоматизированных систем главное решение всегда остается за человеком. Автоматические системы работают без участия человека — по программе.
Какие профессии будут доступны
Специалисты востребованы в любой отрасли промышленности, где используются автоматические системы управления (космической, авиационной, медицинской и т. д.). Если на практике вы усвоили основы механики, умеете работать с нормативными документами, знаете правила составления электросхем и чтения электрочертежей, способны выполнить разделку и монтаж кабелей, значит, смело можете претендовать на вакансии сборщика, монтажника, наладчика, мастера по ремонту и эксплуатации АСУ.
д.). Если на практике вы усвоили основы механики, умеете работать с нормативными документами, знаете правила составления электросхем и чтения электрочертежей, способны выполнить разделку и монтаж кабелей, значит, смело можете претендовать на вакансии сборщика, монтажника, наладчика, мастера по ремонту и эксплуатации АСУ.
Существующие требования к индивидуальным особенностям
Профессиональными качествами специалиста является:
- Внимательность
- Оперативное мышление
- Сенсорная память хорошее зрение
- Четкая координация движений
- Зрительная память
- Аккуратность
Чему обучаются студенты
Техник должен обладать профессиональными компетенциями, соответствующими основным видам профессиональной деятельности:
|




| Срок обучения | На базе 11 класса:Очная — 2 года 10 месяцевЗаочная — Макс. 3 года 10 месяцевВечерняя — Макс. 3 года 10 месяцев 3 года 10 месяцевНа базе 9 класса:Очная — 3 года 10 месяцевЗаочная — Макс. 5 лет 4 месяцаВечерняя — Макс. 5 лет 4 месяца | |
Будущая квалификация
| Техник | |
| Будущие профессии | Наладчик контрольно-измерительных приборов и автоматики | Сборщик электроизмерительных приборов | Слесарь по контрольно-измерительным приборам и автоматике | Электромонтажник-схемщик | Электромонтер по ремонту и обслуживанию электрооборудования | Электромонтер пожарно-охранной сигнализации | |
| Чему научат? |
| |
| Важные учебные предметы | Метрология, стандартизация и сертификация | Теоретические основы технического обслуживания и ремонта электронного оборудования и систем автоматического управления | Теоретические основы технического обслуживания и ремонта электронного оборудования электронной части станков с ЧПУ | Техническая механика | Технология монтажа и наладки электронного оборудования и систем автоматического управления | Технология монтажа и наладки электронного оборудования электронной части станков с числовым программным управлением (ЧПУ) | Технология эксплуатации электронного оборудования и систем автоматического управления | Технология эксплуатации электронного оборудования электронной части станков с ЧПУ | Электрические машины | Электротехника | |
| Практика студентов |
| |
| Итоговая аттестация студентов: |
| |
| Похожие специальности | ||
| Поищем по тегам? | среднее техническое образование, технологическое образование, технические профессии, наладчик, слесарь, техник, электромонтер | |
| Материал подготовлен сайтом www.moeobrazovanie.ru Любое использование материала страницы допускается только с письменного согласия редакции.  | ||
 Во всех остальных областях выпускникам присваивается квалификация техника, технолога, техника-технолога (базовый уровень) или старшего техника, старшего технолога, старшего техника-технолога, специалиста (повышенный уровень).
Во всех остальных областях выпускникам присваивается квалификация техника, технолога, техника-технолога (базовый уровень) или старшего техника, старшего технолога, старшего техника-технолога, специалиста (повышенный уровень). Производственная практика проходит в два этапа: практика по профилю специальности и преддипломная практика. Как правило, практики организуются на предприятиях железнодорожного транспорта, на кораблях, подводных лодках и воинских частях ВМФ, в зависимости от профиля подготовки.
Производственная практика проходит в два этапа: практика по профилю специальности и преддипломная практика. Как правило, практики организуются на предприятиях железнодорожного транспорта, на кораблях, подводных лодках и воинских частях ВМФ, в зависимости от профиля подготовки.
|
|
| |||||||||||||||||||||

 М.А. Бонч-Бруевича
М.А. Бонч-БруевичаСистема управления технологическим процессом автоматизированная
Описание
Создавая автоматизированные системы управления, наши специалисты закладывают возможности их расширения и интеграции в другие смежные системы различных производителей, последующую модернизацию с учетом изменения потребностей заказчика и развития возможностей оборудования для АСУ ТП.
Наша компания имеет большой опыт по внедрению АСУ ТП на базе специализированных микропроцессорных комплексов мировых производителей: FOXBORO, Yokogawa Electric Corporation, Siemens AG и т. п.
п.
Внедрение АСУ ТП позволяет достигать следующие цели:
- обеспечение эффективной работы технологического оборудования, непрерывный мониторинг процесса;
- уменьшение вероятности возникновения аварийных ситуаций;
- облегчение условий и повышение культуры труда технологического персонала за счет предоставляемого системой сервиса;
- уменьшение количества выполняемых технологическим персоналом функций за счет их автоматизации;
- повышение качества и быстродействия регулирования и, как следствие, достижение высокого уровня стабилизации технологических режимов;
- повышение производительности установки за счет улучшения качества регулирования и управления технологическим процессом;
- повышение информационного обеспечения технологического и эксплуатационного персонала;
- повышение надежности работы самой системы управления, за счет применения современных технических устройств на основе электронных и вычислительных средств и наличия самодиагностики;
- уменьшение материальных и энергетических затрат.


Компания «Комдиагностика» имеет многолетний опыт системной интеграции и все необходимые ресурсы для разработки и внедрения АСУ ТП «под ключ». В комплекс осуществляемых работ входят следующие этапы:
- проектирование;
- программирование SCADA-системы;
- монтаж (шеф-монтаж) оборудования;
- пусконаладка;
- ввод в эксплуатацию.
27.02.04 Автоматические системы управления в Москве (список колледжей)
Государственный
Московский техникум космического приборостроения Московского государственного технического университета имени Н. Э. Баумана
Э. Баумана
Автоматические системы управления
27.02.04 | Специальности СПО
| Форма обучения | Бюджетные места 2021/2022 | Платное обучение 2021/2022 |
|---|---|---|
| Очная | Да | Да |
Автоматизированная система управления (АСУ).
 Глоссарий
Глоссарий
ГЛАВНАЯ // Глоссарий
Автоматизированная система управления (АСУ) —
разновидность автоматизированной системы,
предназначенная для автоматизированного управления различными процессами
в рамках производства, предприятия или отрасли.
Автоматизированную систему управления применяют
в различных отраслях промышленности, например, в энергетике,
нефтехимиии, нефтепереработки, на транспорте.
Термин «автоматизированная», в отличие
от термина «автоматическая», подчеркивает выполнение человеком
некоторых функций, или наиболее общих, или не поддающихся
автоматизации.
АСУ является разновидностью
системы управления
с участием человека.
АСУ с системой поддержки принятия решений (СППР),
являются основным инструментом повышения обоснованности управленческих решений.
Важнейшая задача АСУ — повышение
эффективности управления объектом на основе роста производительности
труда и совершенствования методов планирования процесса управления.
Различают автоматизированные системы управления
следующими основными объектами:
- технологическими процессами — АСУ ТП;
- предприятием — АСУП;
- отраслью — ОАСУ.
Автоматизированные системы управления создаются
для достижения следующих целей:
- Предоставление лицу, принимающему решение (ЛПР) необходимых
и достаточных данных для принятия решений. - Снижение количества решений, которые должно принимать ЛПР.
- Повышение оперативности управления.
- Снижение затрат ЛПР на выполнение вспомогательных процессов.
- Повышение степени обоснованности принимаемых решений.
В состав АСУ входят следующие виды обеспечений:
информационное, программное, техническое, организационное, метрологическое,
правовое и лингвистическое.
В общем случае АСУ выполняет следующие функции:
- планирование и прогнозирование;
- учет и контроль;
- координацию и регулирование;
- анализ.
Источник: АО «Экоресурс».
ГЛАВНАЯ // Глоссарий
Автоматизированные системы управления испытаниями
Главная → События компании → 2015 → Автоматизированные системы управления испытаниями
| МЕХАТРОНИКА – это система, объединяющая механические
исполнительные элементы с силовой электроникой, которые управляются с помощью микроконтроллеров и компьютеров. |
|
Наша компания с 2002 года занимается автоматизацией систем управления
испытаниями. В этом направлении нам удалось успешно выполнить ряд крупных
В этом направлении нам удалось успешно выполнить ряд крупных
ответственных заказов, некоторые из них приведены ниже.
Система нагружения (Пермь, 2011 г.)
|
|
|
Система управления стендом вращения (Красноармейск, 2013 г.)
|
Проект системы нагружения в Перми представляет собой стенд для проведения сертификационных
Стенд статических испытаний состоит из трех основных
НПП «МЕРА» выполнило
Система управления нагружением обеспечивает приложение
В
Интегрированная система измерений стенда осуществляет
|
| |
|
Сразу после
Мы предлагаем:
Системы
Системы
| Подробную информацию об автоматизированных системах управления можно найти в брошюре «Автоматизация испытаний». | |
|
|



Особенности:
- Проведение
испытания как в автоматизированном, так
и в автоматическом режиме по заранее заданной циклограмме. - Графическое
отображение измерительной информации и визуальное отображение хода испытания
посредством подсистемы видеонаблюдения. - Регистрация и
хранение результатов измерений и видеоинформации в базе данных испытаний.

Всё поставляемое в составе
системы измерительное оборудование внесено в Государственный реестр средств
измерений. Мы предоставляем услуги по внесению измерительных систем в
Государственный реестр средств измерений.
Мы практикуем комплексный подход к
задаче автоматизации стендовых испытаний от детальной проработки технического
задания до поставки готового комплекса оборудования «под ключ», обучения
специалистов заказчика и технического сопровождения.
Комплексная работа над проектом:
- Формирование
технического задания в соответствии с техническими требованиями заказчика.
Разработка рабочей конструкторской документации. - Разработка и изготовление оборудования, проведение
испытаний компонентов системы на устойчивость к внешним воздействиям. Метрологическая
поверка. Разработка эксплуатационной документации. - Разработка специализированного программного обеспечения.
- Разработка и изготовление кроссировочных средств,
усилителей сигналов. Комплектация системы датчиками. - Проведение пуско-наладочных работ. Комплексная отладка
измерительного оборудования. - Техническая поддержка, обучение персонала. Метрологическое
обеспечение. - Сервисное обслуживание, модернизация.
Проектирование и изготовление систем измерения
Проектирование и изготовление привода испытательных машин по индивидуальным заказам
|
Электропривод
|
Гидро- и пневмопривод
| |
|
|
| |
|
| |
|
Электромеханический привод
|
| |
| ||
|
Преимущества предлагаемых нами систем привода
| ||
|
|
Автоматическая система управления – обзор
1.
 3.3.2.2 Алгоритм контроля температуры
3.3.2.2 Алгоритм контроля температуры
- 1.
Нечеткое управление полем температуры предварительного нагрева
Для достижения контроля температуры предварительного нагрева системы селективного лазерного спекания необходимо найти разумную модель объекта управления, но поле температуры предварительного нагрева оборудования для селективного лазерного спекания представляет собой сложную нелинейную систему, и трудно найти разумную модель объекта управления для достижения температурного контроля поля температуры предварительного нагрева.Нечеткое управление не требует конкретной модели управления, а управление температурой поля температуры предварительного нагрева может быть достигнуто только с помощью нечеткого вывода.
Технология нечеткого управления — это передовая стратегия управления и новая технология, основанная на лингвистических правилах и нечетком выводе в современной теории управления, являющейся ветвью интеллектуального управления. Теория нечеткого управления была впервые предложена американским ученым и известным профессором Калифорнийского университета Л. А. Заде в 1965 году и представляла собой продвинутую стратегию управления, основанную на нечетком выводе в методе представления языковых правил и передовых компьютерных технологиях, основанных на нечетких представлениях. математика.
Теория нечеткого управления была впервые предложена американским ученым и известным профессором Калифорнийского университета Л. А. Заде в 1965 году и представляла собой продвинутую стратегию управления, основанную на нечетком выводе в методе представления языковых правил и передовых компьютерных технологиях, основанных на нечетких представлениях. математика.
Самой большой особенностью технологии нечеткого управления является то, что она подходит для широкого применения в различных областях. Э.Х. Мамдани, профессор Лондонского университета, получил результат применения не ранее 1974 года. Он впервые применил FC группы нечетких управляющих предложений к управлению работой котлов и паровых турбин и добился успеха в экспериментах. С 1985 по 1986 год Япония вступила в период практического использования нечеткого управления.
Нечеткая система управления представляет собой автоматическую систему управления.Это замкнутая цифровая система управления с каналом обратной связи, построенная на основе технологии компьютерного управления. В системе нечеткого управления в качестве теоретической основы используются представление знаний в виде нечеткой математики, нечеткого языка и вывод правил нечеткой логики. Ядром его конституции является FC с интеллектом и самообучением. Основные характеристики системы нечеткого управления следующие:
В системе нечеткого управления в качестве теоретической основы используются представление знаний в виде нечеткой математики, нечеткого языка и вывод правил нечеткой логики. Ядром его конституции является FC с интеллектом и самообучением. Основные характеристики системы нечеткого управления следующие:
- 1.
Система нечеткого управления не зависит от точной математической модели системы.Когда точную математическую модель системы трудно получить или вообще невозможно найти, доступно нечеткое управление, поэтому оно особенно подходит для сложных систем и нечетких объектов.
- 2.
Как правило, нечеткая система управления обладает интеллектом и самообучаемостью. Представление знаний, нечеткое правило и синтетический вывод в системе нечеткого управления в основном основаны на экспертных знаниях или зрелом опыте квалифицированного оператора и могут постоянно обновляться посредством обучения.
- 3.
Ядром системы нечеткого управления является ФК.
В ФК в качестве основного корпуса используется компьютер или однокристальный микрокомпьютер, поэтому он обладает точностью цифровой системы управления и гибкостью программного программирования.
 В ФК в качестве основного корпуса используется компьютер или однокристальный микрокомпьютер, поэтому он обладает точностью цифровой системы управления и гибкостью программного программирования.
В ФК в качестве основного корпуса используется компьютер или однокристальный микрокомпьютер, поэтому он обладает точностью цифровой системы управления и гибкостью программного программирования.Основное отличие нечеткой системы управления от обычной компьютерной цифровой системы управления заключается в использовании FC. FC является ядром системы нечеткого управления. Производительность системы нечеткого управления зависит главным образом от структуры ФК.Нечеткое правило, алгоритм синтетического вывода, нечеткий метод принятия решений и другие факторы, используемые FC, являются ключевыми факторами, определяющими достоинства конечной системы нечеткого управления. FC также называют контроллером нечеткой логики. Поскольку правило нечеткого управления описывается нечетким условным оператором в нечеткой теории, FC является языковым контроллером, который также называется нечетким языковым контроллером.
Как показано на рис. 1.45, FC в основном состоит из пяти частей: нечеткий интерфейс входных величин, база данных членства, база нечетких правил управления, механизм нечеткого вывода и нечеткий интерфейс выходных данных. Вход ФК может быть использован для решения нечеткого выхода управления только после фаззификации в соответствии с реальными потребностями, в результате чего достигается основная функция преобразования входа измеряемой величины в нечеткий вектор, причем нечеткий вектор может быть как единичным вход или мультивход. База данных членства хранит значения вектора членства всех нечетких подмножеств всех входных и выходных переменных. Если нечеткая область дискурса является непрерывной областью, это функция принадлежности. Правило FC в основном основано на экспертных знаниях или многолетнем опыте, накопленном квалифицированными операторами.База нечетких правил и база данных составляют базу знаний всего ФК. Механизм нечеткого вывода является функциональной частью FC, которая решает нечеткое реляционное уравнение путем нечеткого вывода и получает нечеткую управляющую величину на основе нечеткого правила управления в соответствии с входной нечеткой величиной. Нечеткий вывод является наиболее фундаментальной проблемой теории нечеткой логики.
Вход ФК может быть использован для решения нечеткого выхода управления только после фаззификации в соответствии с реальными потребностями, в результате чего достигается основная функция преобразования входа измеряемой величины в нечеткий вектор, причем нечеткий вектор может быть как единичным вход или мультивход. База данных членства хранит значения вектора членства всех нечетких подмножеств всех входных и выходных переменных. Если нечеткая область дискурса является непрерывной областью, это функция принадлежности. Правило FC в основном основано на экспертных знаниях или многолетнем опыте, накопленном квалифицированными операторами.База нечетких правил и база данных составляют базу знаний всего ФК. Механизм нечеткого вывода является функциональной частью FC, которая решает нечеткое реляционное уравнение путем нечеткого вывода и получает нечеткую управляющую величину на основе нечеткого правила управления в соответствии с входной нечеткой величиной. Нечеткий вывод является наиболее фундаментальной проблемой теории нечеткой логики.
Рисунок 1.45. Нечеткий контроллер.
Как правило, система контроля температуры представляет собой систему с большой инерцией, а контроль температуры осуществляется с помощью алгоритма ПИД, нечеткого алгоритма и алгоритма нейронной сети.В практике техники управления рабочие характеристики или входные и выходные характеристики многих сложных объектов управления или процессов трудно определить с помощью простых и практичных физических законов или математических соотношений. В некоторых процессах изменение состояния процесса не может быть точно обнаружено с помощью надежных средств обнаружения, что приводит к трудностям в получении модели объекта, применимой к текущей теории проектирования системы управления в классическом методе математического моделирования, и, как правило, обнаружение завершается в нечеткий метод управления.Учитывая реальную ситуацию в системе и сложную программу алгоритма, для контроля температуры используется нечеткий алгоритм.
Базовая структура системы нечеткого управления температурой предварительного нагрева показана на рис. 1.46. Входом нечеткой системы управления является температура поля температуры предварительного нагрева, измеренная инфракрасным термометром, а выходом — интенсивность нагрева нагревательного устройства поля температуры предварительного нагрева. При осуществлении контрольных мероприятий необходимо не только определить отклонение температуры предварительного нагрева между входной температурой и заданной температурой, чтобы решить, какие меры будут приняты, но также определить скорость изменения отклонения температуры предварительного нагрева.То есть взвешивание и оценка выполняются комплексно на основе отклонения и скорости изменения отклонения, тем самым обеспечивая стабильность управления системой и уменьшая перерегулирование и колебания. Следовательно, когда осуществляется контроль температуры, в нечетком понятии участвуют три лингвистических переменных области дискурса: отклонение температуры Δ T , скорость изменения отклонения Δ Te и контрольная величина на выходе U .
1.46. Входом нечеткой системы управления является температура поля температуры предварительного нагрева, измеренная инфракрасным термометром, а выходом — интенсивность нагрева нагревательного устройства поля температуры предварительного нагрева. При осуществлении контрольных мероприятий необходимо не только определить отклонение температуры предварительного нагрева между входной температурой и заданной температурой, чтобы решить, какие меры будут приняты, но также определить скорость изменения отклонения температуры предварительного нагрева.То есть взвешивание и оценка выполняются комплексно на основе отклонения и скорости изменения отклонения, тем самым обеспечивая стабильность управления системой и уменьшая перерегулирование и колебания. Следовательно, когда осуществляется контроль температуры, в нечетком понятии участвуют три лингвистических переменных области дискурса: отклонение температуры Δ T , скорость изменения отклонения Δ Te и контрольная величина на выходе U .
Рисунок 1.46. Принципиальная структурная схема системы нечеткого регулирования температуры предварительного нагрева.
Нечеткое подмножество в области лингвистической переменной дискурса описывается функцией принадлежности μ ( x ). Функция принадлежности μ ( x ) может быть определена на основе опыта работы оператора или статистических методов. В обычно используемой области дискурса (-6, -5, -4, -3, -2, -1, -0, +0, 1, 2, 3, 4, 5 и 6) восемь нечетких языковых переменных определены значения: отрицательный большой (NB), отрицательный средний (NM), отрицательный малый (NS), отрицательный нуль (NO), положительный нуль (PO), положительный малый (PS), положительный средний (PM) и положительный большой ( ПБ).В соответствии с характеристикой мышления, при которой люди склонны следовать нормальному распределению в своих суждениях о вещах, обычно используется нормальная функция: Для функции принадлежности μ ( x ) нечеткого множества параметр a для нечетких множеств NL, NM, NS, NO, PO, PS, PM и PL может быть установлен как +6, + 4, +2, +0, -0, -2, -4 и -6 соответственно; при значении параметра b больше нуля, чем больше значение b , тем ниже будет чувствительность управления, плавнее будет характеристика управления и выше будет температура; чем меньше значение b , тем выше будет чувствительность управления, но в процессе управления может появиться перерегулирование.
Отклонение температуры Δ T , скорость изменения отклонения Δ T e и нечеткая таблица принадлежности выходного управляющего количества U могут быть получены расчетным путем на основе заданного значения и измеренного значения температуры предварительного нагрева, тем самым получение нечеткой управляющей таблицы. При контроле в реальном времени контрольная величина в реальном времени может быть получена только в виде таблицы. В процессе изготовления деталей регулирующую переменную Δ u нечеткого управления получают, приняв за единицу времени управления временной цикл T по изменению информации сечения с Δ на текущей S O O O 0 и предыдущий слой S P P 0, значение отклонения температуры T C C 0 и текущая скорость изменения отклонения температуры T δ . (1,47)Δu=f(sc,sp,tc)={K1,Площадь(sc,sp)>S1orОбхват(sc,sp)>D1K2,S1≥Площадь(sc,sp)≥S2илиD1≥Обхват(sc,sp) sp)≥D2K3,Outring(sc,sp)=true0, по умолчанию , где K 1 , K 2 и K 3 являются различными изменениями информации о контроле температуры в секции предварительного нагрева , и К 1 > К 2 > К 3 ; Площадь (sc,sp) — разница площадей между срезом sc и срезом sp; S 1 0 и S S 2 0 — это суждение изменений области, и S 1 > S 2 2 0; Обхват (sc,sp) – это разница периметров между срезом sc и срезом sp. 0 — это суждение изменений периметра и D 1 > D 2 ; Outring(sc,sp) — разница в количестве внешних колец между срезами sc и sp. Несмотря на такую информацию, точный контроль температуры может быть предоставлен на протяжении всего производственного процесса. Стабильный и равномерный контроль температуры предварительного нагрева Контроль температуры поля температуры предварительного нагрева системы селективного лазерного спекания может быть достигнут методом нечеткого управления.Однако в процессе изготовления деталей в системе селективного лазерного спекания необходимо обеспечить стабильное, равномерное регулирование всей температуры предварительного нагрева и отклонение температуры во всем рабочем поле в пределах ±3°С. Температура поля температуры предварительного нагрева должна поддерживаться как можно ближе к заданному значению температуры в процессе контроля температуры предварительного нагрева. Система контроля температуры предварительного нагрева системы селективного лазерного спекания представляет собой систему с большой инерцией, поэтому не будет резких изменений температуры предварительного нагрева.При наличии скачков температуры в системе, находящейся под воздействием помех, необходимо устранить такие скачки температуры или свести к минимуму влияние таких скачков температуры. (1.48)T=∑i=1nT[i]P[i]/∑i=1nP[i] Текущее значение обнаружения температуры T [1] должно быть присвоено с максимальным весом, и чем дальше значение обнаружения от текущего состояния обнаружения, тем меньший вес будет присвоен. При сглаживании детектируемого значения температуры можно в принципе устранить влияние слабых помех на систему, но невозможно эффективно устранить сильное колебание температуры детектирования системы, вызванное сильными помехами.Поэтому необходимо определить рациональность текущей температуры детектирования с определенным пороговым значением при реализации сглаживающей фильтрации по значению детектирования температуры, тем самым устраняя сильные помехи. Как показано на рис. 1.47, каждое значение обнаружения температуры представляет собой средневзвешенное значение последовательных n значений измерения. Чем больше полученное значение n , тем мягче будет изменяться значение определения температуры, подвергнутое средневзвешенному значению. Рисунок 1.47. Блок-схема определения температуры. При сильных помехах не только эффективно не устраняется сглаживающая фильтрация значения обнаружения, но и увеличивается время действия сильных помех, что требует вспомогательных мер при реализации сглаживания значения обнаружения, тем самым устраняя сильные помехи. Поскольку температура предварительного нагрева не изменяется внезапно в течение короткого времени, значение домена M может быть установлено заранее. При определенной стратегии контроля температуры плавное управление системой температуры предварительного нагрева может быть в основном обеспечено с помощью метода нечеткого управления и ряда мер защиты от помех; в то же время вся система контроля температуры предварительного нагрева может работать безопасно и стабильно в течение длительного времени, обладая при этом определенной отказоустойчивостью при необходимых мерах контроля. Температурное поле предварительного нагрева системы селективного лазерного спекания представляет собой квадратное рабочее поле, а температурная среда вокруг рабочего поля отличается. Для достижения равномерного контроля температуры предварительного нагрева интенсивность контроля должна быть разной, когда осуществляется контроль температуры предварительного нагрева. На практике слой порошка предварительно нагревается методом лучистого нагрева трубок ламп, а трубки ламп распределяются над температурным полем предварительного нагрева. В зависимости от условий предварительного нагрева, он разделен на три контролируемые группы, что обеспечивает единообразный контроль температурного поля предварительного нагрева. Андреа Серрани (M’94) получил степень Лауреа (B.Eng.) (с отличием) в области электротехники в Университете Анконы, Анкона, Италия, в 1993 году, степень магистра. С 1994 по 1999 год он был стипендиатом программы Фулбрайта в Вашингтонском университете в Сент-Луисе. С 2004 по 2007 год он работал техническим руководителем отдела многоразовых ракет-носителей в Совместном центре исследований управления AFOSR/AFRL Университета штата Огайо, Колумбус, Огайо, США. Он занимал гостевые должности в Университете Болоньи, Болонья, Италия, и Университете Падуи, Падуя, Италия, а также несколько летних должностей преподавателей в Исследовательской лаборатории ВВС на базе ВВС Райт-Паттерсон, Огайо, включая четыре AF-SFFP. Стипендии.С 2002 года он работает на кафедре электротехники и вычислительной техники Университета штата Огайо, Колумбус, штат Огайо, где в настоящее время является профессором и заведующим кафедрой аспирантуры. Доктор Серрани является членом Международной федерации автоматического управления и Американского института аэронавтики и астронавтики. Он получил Сертификат за выдающиеся заслуги в качестве помощника редактора (AE) Automatica , трижды был выбран в качестве выдающегося рецензента IEEE Transaction on Automatic Control и три раза в качестве отличного рецензента AIAA Journal of Guidance. , управление и динамика. Среди прочих должностей он был председателем отдела публикаций на 53-й и 52-й конференциях IEEE по решениям и управлению, а также на Американской конференции по управлению в 2009 году. Когда люди взаимодействуют с окружающей средой, их знание того, как их собственные действия влияют на окружающую среду, часто проявляется как «чувство действия» (SoA) или субъективное чувство контроля внешних событий посредством их собственных действий (Haggard and Tsakiris, 2009). В традиционном объяснении SoA (например, Blakemore et al., 1998, 1999; Voss et al., 2006) прогнозируемое состояние генерируется из эфферентной копии двигательной команды человека, а затем сравнивается с фактическим состоянием контролируемого объект.Если эти состояния совпадают, ощущается SoA; если они не совпадают, SoA не создается (например, Franck et al., 2001; Farrer et al., 2008). Однако лежащий в основе механизм может быть не таким простым. Например, внешние сигналы или выводы могут генерировать «иллюзорную» SoA (Wegner et al., 2004; Moore et al., 2009). Недавняя теория предполагает, что суждение о деятельности может быть постдиктивным или реконструктивным процессом (Haggard, 2005; Metcalfe and Greene, 2007; Wen et al. Хотя манипулирование инструментом обычно приводит к SoA, последние разработки систем автоматического управления, которые требуют меньше ручного управления со стороны оператора, должны подавлять это чувство. Одним из самых известных примеров системы автоматического управления является система круиз-контроля, которую многие производители автомобилей начали включать в автономные транспортные средства. Когда люди водят автономный автомобиль, они чувствуют, что водить машину стало легче, потому что им больше не нужно самостоятельно управлять автомобилем.В то же время они могут чувствовать себя менее вовлеченными в задачу вождения, потому что им не хватает SoA. Действительно, предыдущее исследование (Berberian et al., 2012a) SoA в системах автоматизации летательных аппаратов показало, что при повышении уровня автоматизации задачи контроля с полностью ручного управления до полностью автоматического управления SoA снижается. Какие проблемы возникают, когда инструмент работает автоматически? Разработчики систем автоматизации часто полагали, что добавление автоматизации является простой заменой человеческой деятельности машинной деятельностью и что автоматизация приводит к сокращению SoA из-за этой замены (см.Бербериан и др., 2012b). Однако традиционная автоматизация имеет много негативных последствий, возникающих из-за действий человека «вне цикла» (Endsley and Kiris, 1995; Kaber and Endsley, 1997), что снижает способность операторов автоматической системы взять на себя ручное управление. операции в случае отказа автоматики. В настоящее время в ситуации автоматического управления операторам иногда может потребоваться принять меры для управления, потому что система не может справиться со всеми возможными проблемами. Системе особенно сложно справляться с опасными и сложными проблемами, и операторы должны взять на себя управление в экстренной ситуации.В этих ситуациях проблема производительности «вне цикла» может иметь серьезные последствия. Совершенно очевидно, что оператору необходимо участвовать в контроле для предотвращения этой «неконтролируемой» проблемы с производительностью. Эффективный способ добиться этого — поддерживать SoA во время использования инструментов или управления объектами (см. Berberian et al., 2012b; Wen et al., 2019), хотя могут быть и другие решения. Если операторы явно ощущают SoA при управлении инструментами, они также должны чувствовать, что они вовлечены в цикл использования инструментов.То есть ощущение SoA должно быть основой для ощущения участия в цикле использования инструмента даже в системе автоматизации. Мы рассмотрели возможность сохранения SoA при перемещении объекта в ситуации автоматического управления. Следует отметить, что SoA в ситуации автоматического управления является, строго говоря, иллюзорным SoA, поскольку наблюдатели вообще не контролируют объект. Следовательно, чтобы поддерживать SoA в ситуации автоматического управления, наблюдатели должны чувствовать, что они контролируют объект. Настоящее исследование сосредоточено на двух возможных характеристиках ситуации управления объектом, которые влияют на SoA в ситуации автоматического управления. Первая характеристика – целенаправленность действий. Во многих ситуациях использования инструмента операторы используют инструмент для достижения своей цели (т. е. для выполнения своего намерения). Рассмотрим ситуацию, когда водитель тормозит автомобиль, нажимая на педаль тормоза, чтобы остановить автомобиль в ожидаемом месте (например, у знака «Стоп» или на парковке), а не останавливаясь в произвольном месте, как он хочет.Второй характеристикой является постепенное появление результата или развитие намеченного эффекта. Например, когда водитель нажимает на педаль тормоза, автомобиль обычно замедляется, а затем останавливается, а не останавливается резко. Мы исследовали влияние этих характеристик на SoA при остановке движущегося объекта, манипулируя их наличием/отсутствием в условиях, в которых присутствует или отсутствует цель (состояние присутствия/отсутствия цели) и присутствует или отсутствует постепенный результат (постепенный/внезапный). Когда люди используют автоматические системы управления, они обычно точно знают, что система работает независимо от их контроля. Например, водители автономных автомобилей четко знают, что автомобиль будет двигаться автоматически, хотя они не управляют рулевым колесом и/или акселератором и педалью тормоза. Таким образом, мы исследовали SoA, когда инструкции заранее информировали участников о том, что задача будет включать испытания с автоматическим контролем. Кроме того, как описано выше, операторам иногда необходимо осуществлять контроль над инструментами даже в ситуации автоматического управления, потому что система не всегда может адекватно реагировать на конкретные проблемы.Наша цель — исследовать эффективные способы поддержания SoA в ситуации автоматического управления, чтобы предотвратить проблему производительности «вне цикла». Мы смешали многочисленные испытания с автоматическим контролем и случайные испытания с ручным управлением в одном блоке и сравнили рейтинги SoA между этими двумя типами контрольных испытаний. В исследовании приняли участие 27 молодых людей (средний возраст: 21 год, 15 женщин). Мы не проводили расчет мощности, поскольку, насколько нам известно, ни в одном из предыдущих исследований не изучалась модуляция SoA в ситуациях автоматического управления.Однако этот размер выборки был сопоставим с размерами недавних исследований SoA, в которых участвовало 20–30 человек (например, Franck et al., 2001; Farrer et al., 2008; Wen et al., 2015b,c). Все были наивны в отношении цели этого исследования и имели нормальное или скорректированное до нормального зрение. Трое участников (одна женщина) были левшами. Этот эксперимент был одобрен Институциональным наблюдательным советом Riken, и от всех участников было получено письменное информированное согласие. Лечение участников проводилось в соответствии с Хельсинкской декларацией. Представление стимулов и запись ответов участников контролировались компьютером с использованием программного обеспечения Matlab с Psychtoolbox (Brainard, 1997; Pelli, 1997; Kleiner et al. Фон дисплея (угол обзора 76,2° × 47,6°) представлял собой серое поле, на котором случайным образом было разбросано множество маленьких белых точек. Точки были предназначены для того, чтобы участники почувствовали, что на дисплее есть трение. В условиях присутствия цели цель, серый квадрат (150 пикселей × 150 пикселей, т. е. 7,0° × 7,0°), предъявлялась с правой стороны дисплея. Центр цели находился в 400 пикселях (т. е. 18,6°) от правого края дисплея. Черный круг (диаметром 100 пикселей, т.е., 4,7°) был объектом контроля. При каждом испытании экспериментальной задачи круг перемещался вправо от левой стороны дисплея вдоль невидимой вертикально центрированной линии на дисплее. Четыре экспериментальных условия были созданы в факторном плане 2 (цель: присутствует/отсутствует) × 2 (тип остановки: внезапная/постепенная) (см. рис. 1). Эти условия были заблокированы, а порядок блокировки был рандомизирован между участниками. Мы проинструктировали участников во всех блоках нажимать клавишу один раз, чтобы тормозить круг в каждом испытании. Мы проинструктировали их стремиться к тому, чтобы как можно точнее остановить круг внутри квадрата ворот в состоянии присутствия цели. Мы сказали, что они могут свободно останавливать круг, где хотят, в состоянии отсутствия ворот.В условиях внезапной остановки при торможении круг резко останавливался; тогда как в условиях постепенной остановки при торможении круг плавно замедлялся с постоянным замедлением (60 × 9,8 пикселей/с 2 , т. Рисунок 1 . Примеры движения окружности в четырех экспериментальных задачах.Эти четыре условия были заблокированы. Сплошные линии указывают на движение с постоянной скоростью, а пунктирные линии на замедление. В большинстве испытаний (75% испытаний в каждом блоке) круг останавливался автоматически. Участников просили нажимать клавишу в каждом испытании. При каждом испытании после остановки круга появлялось ответное окно. На экране ответов участники представили субъективные оценки своего SoA, указав, в какой степени, по их мнению, они сами остановили круг.Они набрали число от 1 до 100, причем большее число указывало на более сильную SoA. Участники сидели на стуле, расположенном на расстоянии 65 см от дисплея, и тестировались индивидуально. Участникам было прямо сказано, что каждый блок содержит пробы с автоматическим управлением, при которых круг останавливается независимо от нажатия ими клавиши. Место, где останавливался круг (т. е. его центр), определялось случайным образом в пределах ± 300 пикселей (т. е. 14,0°) от центра цели в каждом из испытаний с автоматическим контролем, хотя участники не были проинформированы об этом.Мы устанавливали невидимую цель в условиях отсутствия цели в том же месте, что и в условиях присутствия цели, а место остановки круга определялось так же, как и в условиях присутствия цели. Даже если участники не нажимали клавишу для остановки круга, испытание прекращалось примерно через 1000 мс после того, как круг проходил через правый край дисплея (т. е. круг не мог быть виден на дисплее) в испытаниях с ручным управлением или 1000 мс после остановки круга на испытаниях с автоматическим управлением. В этих случаях отображался предупреждающий дисплей, чтобы напомнить им о необходимости нажать клавишу, а затем появлялся ответный дисплей. Мы исключили из анализа испытания, в которых участники не смогли выполнить задание, потому что они не нажали клавишу, чтобы остановить круг. Это были 2,0% испытаний. Мы сравнили снижение SoA, вызванное автоматическим управлением в каждом состоянии (рис. 2A). Это снижение было определено как разница в оценках испытаний с ручным и автоматическим контролем (т. Рисунок 2 . Результаты эксперимента. (A) Декременты чувства ответственности (SoA): различия в SoA между испытаниями с ручным и автоматическим управлением. (B) Субъективные оценки SoA при испытаниях с ручным и автоматическим управлением. Столбики погрешностей указывают на 95% доверительные интервалы. Эти результаты показывают, что сочетание целенаправленного действия и постепенного появления результата, т.е.т. е. характеристики использования инструмента, ослабили снижение SoA в результате автоматизации, хотя это снижение не было устранено полностью. Следовательно, эти характеристики использования инструмента могут быть эффективными для поддержки SoA при автоматическом управлении объектом. Мы показали, что две характеристики (т. е. целенаправленное действие и постепенное появление результата) ослабляют уменьшение SoA из-за автоматизации.Затем мы рассмотрели, как эти характеристики влияют на рейтинги SoA, чтобы выяснить, почему они ослабляют снижение SoA за счет автоматизации. Оценки SoA в испытаниях с автоматическим и ручным контролем сравнивались (рис. 2B) с помощью ANOVA с факторами внутри участников типа контроля (автоматический/ручной), цели и типа остановки. Наш основной интерес в этом анализе заключался в изучении того, меняются ли эффекты цели и типа остановки в зависимости от типа контроля. Поэтому мы сосредоточимся на взаимодействии между каждым из этих факторов и типом контроля.Перед основными результатами мы подтвердили, что, как и ожидалось, основной эффект типа контроля был значимым, F (1, 26) = 193,50, p < 0,001, η p 2 = 0,88, с более высокими оценками SoA в испытаниях с ручным управлением, чем в испытаниях с автоматическим управлением. Взаимодействие между типом управления и типом остановки было значительным, F (1, 26) = 142,59, p < 0,001, η p 2 = 0.85, с более высокими оценками в условиях постепенной остановки, чем в условиях внезапной остановки в испытаниях с автоматическим управлением, p < 0,001, но более низкими оценками в условиях постепенной остановки в испытаниях с ручным управлением, p < 0,001 . Взаимодействие между типом контроля и целью также было значительным, F (1, 26) = 68,30, p < 0,001, η p 2 = 0,72, с более высокими оценками в состоянии присутствия цели, чем в условиях отсутствия ворот в пробах с автоматическим контролем p < 0.001, но более низкие оценки в состоянии присутствия цели на испытаниях с ручным управлением, p = 0,025. Хотя основные эффекты цели, типа остановки и их взаимодействия были значимыми, F (1, 26) = 13,47, p = 0,001, η p 2 = 0,34; F (1, 26) = 7,76, p = 0,010, η p 2 = 0,23; F (1, 26) = 5,54, p = 0,026, η p 2 = 0. Взаимодействие между типом контроля и типом остановки показало, что постепенное появление результата снижало SoA в испытаниях с ручным управлением, но увеличивало SoA в испытаниях с автоматическим контролем. Когда круг резко останавливался, было относительно легко судить о том, было ли применено ручное торможение, потому что время возникновения исхода было ясно.Это могло привести к очень низким оценкам испытаний с автоматическим управлением и высоким оценкам испытаний с ручным управлением в условиях внезапной остановки. Напротив, когда круг замедлялся и останавливался (т. Е. В состоянии постепенной остановки), время, в которое был применен тормоз, было неясным, что затрудняло оценку того, точно ли он управлялся автоматически или вручную. Следовательно, рейтинги SoA при испытаниях с ручным и автоматическим управлением стали одинаковыми в условиях постепенной остановки. Было показано, что пространственно-временное несоответствие между запланированным действием и его результатом снижает SoA (например, Sato and Yasuda, 2005; Farrer et al., 2013; Kawabe, 2013; Kawabe et al., 2013; Wen et al., 2015a). . В условиях постепенной остановки воспринимаемая более длительная задержка от начала действия (нажатия клавиши) до появления результата должна была иметь повышенную временную несогласованность, а разница между способом действия (однократное нажатие клавиши) и способом остановки (постепенное замедление) также должно увеличить несогласованность действий и результатов.Однако рейтинги SoA в условиях постепенной остановки были выше, чем в условиях внезапной остановки в испытаниях с автоматическим управлением. Таким образом, сама по себе пространственно-временная несогласованность в условиях постепенной остановки не может полностью объяснить настоящие результаты. Взаимодействие между типом управления и целью указывает на то, что наличие цели снижало SoA в испытаниях с ручным управлением, но увеличивало SoA в испытаниях с автоматическим управлением.Есть две возможные причины, по которым наличие цели ухудшало SoA в испытаниях с ручным управлением. Во-первых, цель может накладывать ограничения на действия наблюдателя, и это ослабляет ощущение «самостоятельности». SoA уменьшается, если действие ограничивается внешними силами, а не свободной волей манипулятора (Tsakiris et al., 2006; Wenke et al., 2010; Barlas, Obhi, 2013). Вторая причина связана с предположением, что рейтинги SoA могут измениться постдиктивно из-за модуляции агентства на основе результатов.Предыдущие исследования (например, Wen et al., 2015a; Inoue et al., 2017) показали, что SoA увеличивается с улучшением выполнения задачи, вызванным заметной или незамеченной помощью, предполагая, что люди могут ошибочно приписывать хорошую эффективность контроля своим собственным действиям. Напротив, наличие цели увеличивало SoA в испытаниях с автоматическим контролем, возможно, из-за других механизмов, лежащих в основе описанного выше процесса. Одна из возможных причин такого увеличения заключается в том, что цель, которую необходимо достичь, видна, а система автоматического управления была запрограммирована на достижение этой цели, и намерение наблюдателей может случайно совпадать с результатом, выдаваемым системой. В результате у наблюдателей может возникнуть иллюзия, что результат связан с их намерением, что приведет к увеличению SoA.Другими словами, наличие цели может заставить наблюдателей чувствовать, что система разделяет с ними контроль, т. е. очевидное разделение целей между наблюдателями и системами. В дополнение к основному анализу мы провели несколько предварительных анализов. Мы исследовали, влияет ли агентная модуляция на основе выполнения задачи (т.г., Вен и др., 2015а; Inoue et al., 2017) применяется к (иллюзорной) SoA в ситуации автоматического управления. Мы изучили влияние кажущейся производительности на SoA в испытаниях с автоматическим управлением. Мы разделили испытания на три группы в зависимости от места остановки круга: неспособность достичь цели, пересечение с целью и прохождение цели (рис. 3). Недостижение определялось как круг, останавливающийся слева от цели (т. е. не перекрывающийся, так что расстояние между центрами круга и целью было больше 125 пикселей, т.е., 5,8°). Перекрытие определялось как перекрытие круга и цели не менее чем на 1 пиксель. Рисунок 3 . Оценки SoA и количество попыток (у основания каждого столбца) в зависимости от типа остановки и положения круговой остановки.Столбики погрешностей указывают на 95% доверительные интервалы. Не дойти: круг остановился слева от ворот. Перекрытие: круг и цель перекрываются как минимум на один пиксель. Прохождение: круг остановился справа от ворот. Общее количество испытаний для трех условий стоп-позиции не равно 45, потому что в среднем примерно одно испытание данных каждого участника было исключено из анализа. В то время как наблюдатели чувствовали, что система разделяет с ними цель, сами их действия могут быть изменены наличием видимой цели, т. Таблица 1 . Среднее время, прошедшее с начала испытания до нажатия клавиш участниками. В некоторых испытаниях с автоматическим контролем участники нажимали клавишу после того, как круг был замедлен автоматической системой. Таблица 2 .Средние оценки SoA в зависимости от времени нажатия клавиши (до и после торможения) и типа остановки при испытаниях автоматического управления в условиях наличия цели. Интересно, что даже когда участники нажимали клавишу после резкой остановки круга в состоянии внезапной остановки, они могли чувствовать, что контролируют круг. На испытаниях, когда нажатие клавиши происходило после остановки круга, отставание составляло всего около 150 мс. В этом исследовании основное внимание уделялось двум характеристикам использования инструментов или управления объектом, целенаправленному действию и постепенному появлению результата, а также изучалось влияние этих характеристик на SoA в ситуации автоматического управления.Результаты показывают, что постепенное появление результата затрудняет определение времени появления результата, так что результат может быть приписан действию наблюдателя. Кроме того, наличие цели может привести к тому, что результат, который наблюдатели намереваются получить, станет похожим на фактический результат, который производит система, что, возможно, заставит их соответствующим образом модифицировать свои действия. Создается иллюзорный SoA, когда наблюдатель ложно связывает действие с его результатом в ситуации автоматического управления.Теория Вегнера «кажущейся ментальной причинности» (Wegner and Wheatley, 1999; Wegner, 2003) предполагает, что опыт воли (или действия) может возникать в условиях приоритета, последовательности и исключительности: приоритет указывает на то, что действие происходит раньше, чем эффект. Важно иметь в виду, что поддержание SoA в ситуации автоматического управления осуществляется иллюзорно. Настоящие результаты относятся к SoA в автономном вождении автомобиля, в котором водители обычно оставляют управление движением системе, но иногда контролируют его самостоятельно. Согласно конструктивным механизмам автомобиля результат манипуляции (ускорение, торможение, поворот и т. д.) обычно проявляется постепенно. Таким образом, само вождение транспортного средства потенциально может поддерживать SoA в ситуации автоматического управления, если только водитель полностью не занимается другими задачами (например, водителем). Проблема производительности «вне цикла» подразумевает, что манипуляторы чувствуют, что они вообще не используют инструмент (или систему), и в результате они не участвуют в манипулировании инструментом. Поддержание SoA может помочь избежать этой проблемы.Признание цели (или цели) особенно важно, потому что намерение манипулировать инструментом (т. е. достичь цели) дает семена SoA. Если манипуляторы имеют цель использования инструмента и действуют для достижения этой цели, и результат, производимый инструментом (системой), соответствует этой цели, то манипуляторы склонны считать, что эффект (результат) использования инструмента был результатом своих собственных действий, даже если инструмент (система) фактически произвел результат. Хотя наши результаты показывают, что наличие цели и постепенное появление результата (т.е. постепенная остановка объекта) повышали субъективную оценку SoA для торможения объекта, существуют некоторые ограничения. Во-первых, необходимо иметь в виду, что в этом исследовании измерялась SoA для однократного управления объектом. Во-вторых, на SoA могут влиять и другие факторы, такие как опыт и усталость. Манипуляторы, годами использующие средства автоматического управления, могут чувствовать SoA иначе, чем те, кто их не использует. Кроме того, когда манипуляторы устают, они могут не захотеть работать с инструментом самостоятельно. В таких случаях влияние характеристик использования инструмента на SoA может различаться. Более того, важно проверить SoA на предмет генерации события (т.например, ускорение объекта), а также SoA для прекращения события (например, замедления объекта) в случае систем автоматического вождения. В недавнем исследовании сообщалось, что явный SoA для создания события сильнее, чем SoA для завершения события (Asai et al. В-третьих, важен и тип измерения SoA. Хотя это исследование было сосредоточено на явном аспекте SoA, SoA включает в себя явные и неявные аспекты.Одним из наиболее репрезентативных измерений имплицитного действия является эффект преднамеренного связывания (IB; Haggard et al., 2002), относящийся к тому факту, что наблюдатели воспринимают продолжительность между своим действием и его результатом как более короткую, когда они чувствуют SoA, чем когда они это делают. нет. Рейтинги SoA и IB могут отражать разные процессы (например, Synofzik et al., 2013; Wen et al., 2015b). Однако они могут быть в некоторой степени связаны, по крайней мере, в простых двигательных задачах (Imaizumi and Tanno, 2019). Поэтому важно исследовать ИБ в ситуации автоматического управления. В этом исследовании изучались возможные способы поддержания SoA в ситуациях автоматического управления, чтобы предотвратить проблему производительности «вне цикла», что является положительным аспектом поддержания SoA в ситуациях автоматического управления. В заключение отметим, что две характеристики использования инструментов или контроля над объектами, рассматриваемые в этом исследовании, а именно целенаправленное действие и постепенное появление результата, могут быть эффективными для поддержания иллюзорного SoA даже в ситуации автоматического управления. Все наборы данных, представленные в этом исследовании, включены в статью/дополнительный материал. Исследования с участием людей были рассмотрены и одобрены экспертным советом Riken [Wako3 24-2(8)].Участники дали письменное информированное согласие на участие в этом исследовании. RN разработал концепцию исследования, собрал и проанализировал экспериментальные данные и составил рукопись. ТК помог разработать концепцию исследования и составить рукопись. Все авторы внесли свой вклад в статью и одобрили представленную версию. Авторы заявляют, что это исследование получило финансирование от TOYOTA Motor Corporation. Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов. Мы благодарим Sayako Ueda, Kyoko Hine, Ritsuko Iwai (RIKEN), Terumasa Endo и Satoshi Inoue (TOYOTA Motor Corporation) за полезные комментарии к нашей рукописи. Дополнительный материал к этой статье можно найти в Интернете по адресу: https://www.frontiersin.org/articles/10.3389/fpsyg.2020.02062/full#supplementary-material . Асаи Т., Имаидзуми С. и Имамидзу Х. (2019). «Я» как порождающее, телеологическое и субъективное предшествующее: взаимомодулируемое временное действие. bioRxiv 519934. [препринт]. Полнотекстовая перекрестная ссылка | Академия Google Берберян, Б., Le Blaye, P., Maille, N., and Sarrazin, J.-C. (2012б). Чувство контроля в задачах контроля автоматизированных систем. J. AerospaceLab AL04-09, 1–10. Академия Google Бербериан, Б., Саррацин, Дж.-К., Ле Блей, П., и Хаггард, П. (2012a). Технологии автоматизации и чувство контроля: взгляд на человека. PLoS One 7:e34075. doi: 10.1371/journal.pone.0034075 Полнотекстовая перекрестная ссылка | Академия Google Блейкмор, С.-Дж., Фрит, К.Д. и Вольперт Д.М. (1999). Пространственно-временной прогноз модулирует восприятие стимулов собственного производства. J. Cogn. Неврологи. 11, 551–559. дои: 10.1162/089892999563607 Реферат PubMed | Полный текст перекрестной ссылки | Академия Google Эндсли, М. Р., и Кирис, Э. О. (1995). Проблема производительности вне цикла и уровень контроля в автоматизации. Гул. Академия Google Франк, Н., Фаррер, К., Георгиев, Н., Мари-Кардин М., Далери Дж., д’Амато Т. и др. (2001). Дефектное распознавание собственных действий у больных шизофренией. утра. Журнал психиатрии 158, 454–459. doi: 10.1176/appi.ajp.158.3.454 Реферат PubMed | Полный текст перекрестной ссылки | Академия Google Хаггард, П., и Цакирис, М. (2009). Опыт свободы воли: чувства, суждения и ответственность. Курс. Реж. Психол. науч. 18, 242–246. doi: 10.1111/j.1467-8721.2009.01644.x Полнотекстовая перекрестная ссылка | Академия Google Иноуэ, К., Такеда Ю. и Кимура М. (2017). Чувство свободы действий в непрерывном действии: улучшение производительности, вызванное помощью, приписывается самому себе, даже при знании помощи. В сознании. Познан. 48, 246–252. doi: 10.1016/j.concog.2016.12.003 Реферат PubMed | Полный текст перекрестной ссылки | Академия Google Кабер, Д. Полнотекстовая перекрестная ссылка | Академия Google Кавабе, Т., Роузбум, В., и Нисида, С. (2013). Чувство действия — это восприятие причинно-следственной связи действия и следствия, основанное на кросс-модальной группировке. Проц. Р. Соц. В 280:20130991. doi: 10.1098/rspb.2013.0991 Полнотекстовая перекрестная ссылка | Академия Google Кляйнер, М., Брейнард, Д., и Пелли, Д. (2007). Что нового в Psychtoolbox-3? Восприятие 36, приложение к реферату ECVP. Академия Google Сато, А., и Ясуда, А. (2005). Иллюзия чувства самодеятельности: несоответствие между прогнозируемыми и фактическими сенсорными последствиями действий модулирует чувство самодеятельности, но не чувство собственности. Реферат PubMed | Полный текст перекрестной ссылки | Академия Google Цакирис М., Прабху Г. и Хаггард П. (2006). Иметь тело или двигать своим телом: как агентство структурирует владение телом. В сознании. Познан. 15, 423–432. doi: 10.1016/j.concog.2005.09.004 Реферат PubMed | Полный текст перекрестной ссылки | Академия Google Восс М., Инграм Дж. Н., Хаггард П. и Вулперт Д. М. (2006). Сенсомоторное затухание центральными двигательными командными сигналами в отсутствие движения. Нац. Неврологи. 9, 26–27. дои: 10.1038/nn1592 Реферат PubMed | Полный текст перекрестной ссылки | Академия Google Вегнер, Д. М., Воробей, Б., и Винерман, Л.(2004). Замещающее агентство: переживание контроля над движениями других. Дж. Перс. соц. Психол. 86, 838–848. дои: 10.1037/0022-3514.86.6.838 Реферат PubMed | Полный текст перекрестной ссылки | Академия Google Вэнь В. Полнотекстовая перекрестная ссылка | Академия Google Вэнь В., Ямасита А. и Асама Х.(2015а). Чувство свободы действий во время непрерывного действия: производительность важнее, чем ассоциация действия и обратной связи. PLoS One 10:e0125226. doi: 10.1371/journal.pone.0125226 Полнотекстовая перекрестная ссылка | Академия Google Вэнь В., Ямасита А. и Асама Х. (2015b). Влияние задержки и возбуждения действия-результата на чувство действия и преднамеренный связывающий эффект. В сознании. Познан. 36, 87–95. doi: 10.1016/j.concog.2015.06.004 Реферат PubMed | Полный текст перекрестной ссылки | Академия Google Вен, В., Ямасита, А., и Асама, Х. (2015c). Влияние целей на чувство контроля. В сознании. Познан. 37, 83–90. doi: 10.1016/j.concog.2015.08.012 Полнотекстовая перекрестная ссылка | Академия Google Венке Д. Реферат PubMed | Полный текст перекрестной ссылки | Академия Google Управление — это использование обратной связи для получения желаемой производительности системы при наличии неопределенностей.Системы управления — это широкая область, в которой аспекты предмета проявляются во всех инженерных областях, физических науках и науках о жизни, менеджменте, экономике и математике и опираются на них. Системы управления встречаются повсюду в искусственных и природных мирах. Типичными примерами систем управления являются наведение и управление самолетами и космическими кораблями, управление сложными промышленными процессами, такими как линии по производству полупроводников, и автоматическое регулирование напряжения и частоты в узких пределах в крупных электрических сетях. Учащимся настоятельно рекомендуется консультироваться с членами контрольного комитета по планированию программ, подчеркивающих особые интересы или карьерные цели. Важна хорошая подготовка по математике: МАТЕМАТИКА 418 рекомендуется вместо МАТЕМАТИКА 415, а также либо МАТЕМАТИКА 444, либо МАТЕМАТИКА 447. ECE 486 — это базовый контрольный курс бакалавриата, который можно пройти на младшем курсе, что позволяет более ориентированные на контроль факультативы на старшем курсе. Другие перечисленные курсы предоставляют концепции и методы, важные для инженера по управлению.Кроме того, настоятельно рекомендуется MATH 415 или MATH 416 . Некоторые дополнительные технически ориентированные факультативы, особенно подходящие для области управления, включают: MATH 415 или MATH 418, MATH 444 или MATH 447, MATH 446 или 448, MATH 461 или 410, MATH 466, GE 423, GE 424, CS 173, ECE 330, ECE 348, ECE 411, ECE 420, ECE/CS 448, ECE 464, ECE 470, ECE 489 В крупных коммерческих комплексах автоматизированные системы управления зданием представляют собой простой способ повысить эффективность, обеспечить комфорт жильцов и снизить эксплуатационные расходы. От простых таймеров и диммеров до передовых систем прямого цифрового управления (DDC) SitelogIQ предлагает решения по автоматизации для каждого клиента. Позвольте нам оценить ваши потребности и порекомендовать комбинацию инструментов и технологий, которая вам подходит. Свяжитесь с нами сегодня Средства автоматизации и управления зданием Коммерческие объекты имеют много движущихся компонентов — автоматизация и управление зданием могут принимать самые разные формы.Некоторые из систем и процессов, с которыми может помочь автоматизация, включают: Совместная работа всех этих компонентов из единой точки мониторинга снижает трудозатраты, необходимые для обеспечения безопасной и прибыльной работы, позволяя при этом собирать и отслеживать важные системные данные и вносить необходимые коррективы. Многие домовладельцы начинают вторую смену, как только приходят домой, патрулируя и настраивая освещение, ОВК, систему безопасности и другие домашние системы. Но есть более простой, эффективный и потенциально гораздо более экономичный способ управления системами в вашем доме с помощью современных высокотехнологичных систем домашней автоматизации и управления. С различными уровнями ценообразования и уровнями сложности на выбор, вероятно, есть система, которая будет соответствовать вашему бюджету и потребностям вашего дома. Проще говоря, система домашней автоматизации объединяет несколько электронных устройств друг с другом. Различные системы, управляемые с помощью домашней автоматизации, часто подключаются к домашней компьютерной сети, что позволяет домовладельцам удаленно управлять компонентами со своих компьютеров или мобильных устройств, таких как смартфоны и планшеты. Основными категориями систем, контролируемых домашней автоматикой, являются системы освещения, безопасности, ОВКВ и наружные спринклерные системы. Системы управления освещением часто работают по таймеру, так что некоторые или все осветительные приборы в доме включаются или выключаются в заданное время. Основным преимуществом автоматизации освещения является энергоэффективность, но эту функцию также можно рассматривать как преимущество безопасности, поскольку хорошо освещенный дом может быть менее мишенью для преступников. Автоматизированные системы домашнего освещения требуют подключения к домашней электросети; ими можно управлять дистанционно или с помощью домашних панелей управления и пультов дистанционного управления.Полностью интегрированная система управления освещением, подключенная к системе автоматизации всего дома, может быть довольно дорогостоящей, тогда как автономная система будет стоить значительно дешевле. Домашние системы безопасности широко доступны и относительно доступны по цене. Они могут быть интегрированы с существующей системой автоматизации всего дома или предназначены для работы отдельно. Они предлагают различные уровни сложности, от простых детекторов, которые контролируют безопасность дверей и окон, до сложных комбинаций детекторов движения, камер и даже технологии распознавания лиц. Отоплением, вентиляцией и кондиционированием воздуха также можно управлять с помощью систем домашней автоматизации, часто с превосходными преимуществами энергосбережения. Домовладельцы могут регулировать температуру во всем своем доме или даже в отдельных комнатах или зонах, а также создавать температурный календарь и расписание на основе всего, от прогнозов погоды до предстоящего визита двоюродной бабушки, которая любит, чтобы в гостевой комнате было особенно жарко. Автоматические наружные спринклерные системы также часто предлагаются как часть домашней автоматизации и управления, поскольку они устраняют необходимость в громоздких и неэффективных автономных спринклерах или трудоемком ручном поливе. Домашняя автоматизация и системы управления обеспечивают большие преимущества удобства, экономии средств и времени. В зависимости от вашего бюджета и потребностей вашего дома правильным выбором может быть интегрированная система автоматизации всего дома или серия автономных систем.Независимо от того, какой подход вы выберете, скорее всего, вы увидите немедленную отдачу как с экономической точки зрения, так и с точки зрения увеличения свободного времени. Осень Требуемый курс: № Бакалавриат 3 ЕСЕ 340 Дорф, Р. Ссылка: Дойл, Джон, Брюс Фрэнсис и Аллен Танненбаум. Теория управления с обратной связью (PDF) . Издательство MacMillan, 1990. Интернет. 150 минут лекций в неделю Представление линейной системы управления во временной и частотной областях, характеристики системы управления с обратной связью, анализ производительности и устойчивости, а также разработка системы управления. К концу этого курса учащийся сможет: ECE 414A вносит непосредственный вклад в следующие конкретные результаты студентов по электротехнике и вычислительной технике факультета ECE: Грег Дитцлер, 07. При практическом контроле температуры предварительного нагрева интенсивность контроля температуры получается в соответствии с информацией об изменении секции в форме поиска в таблице. В процессе графического сканирования системы селективного лазерного спекания изменение информации о сечении включает в себя как изменение площади сечения, так и изменение контурного кольца. Вновь добавленное контурное кольцо необходимо подвергнуть специальному предварительному нагреву, и модель управления температурой предварительного нагрева показана в формуле (1.47).
При практическом контроле температуры предварительного нагрева интенсивность контроля температуры получается в соответствии с информацией об изменении секции в форме поиска в таблице. В процессе графического сканирования системы селективного лазерного спекания изменение информации о сечении включает в себя как изменение площади сечения, так и изменение контурного кольца. Вновь добавленное контурное кольцо необходимо подвергнуть специальному предварительному нагреву, и модель управления температурой предварительного нагрева показана в формуле (1.47). D 1 1 D 2 2
D 1 1 D 2 2  В процессе фактического контроля температуры предварительного нагрева входом контроля температуры является температура слоя порошка, измеренная инфракрасным термометром, и весь слой порошка нагревается тепловым излучением ламповых трубок.Так как температура детектирования может быть нестабильной при внешних помехах, могут быть вызваны отклонения в детектируемой системой температуре, и даже появляются скачки, приводящие к нестабильному управлению. Среда предварительного нагрева и условия нагрева в каждой позиции всего рабочего поля различны, что создает большие трудности для равномерного регулирования температурного поля предварительного нагрева.
В процессе фактического контроля температуры предварительного нагрева входом контроля температуры является температура слоя порошка, измеренная инфракрасным термометром, и весь слой порошка нагревается тепловым излучением ламповых трубок.Так как температура детектирования может быть нестабильной при внешних помехах, могут быть вызваны отклонения в детектируемой системой температуре, и даже появляются скачки, приводящие к нестабильному управлению. Среда предварительного нагрева и условия нагрева в каждой позиции всего рабочего поля различны, что создает большие трудности для равномерного регулирования температурного поля предварительного нагрева. Учитывая, что изменение температуры в поле температуры предварительного нагрева является относительно медленным процессом, значение определения температуры также изменяется относительно плавно. Поэтому сглаживающий фильтр предназначен для реализации сглаживающей фильтрации на обнаруженном сигнале температуры, и влияние каждого значения обнаружения температуры на определение температуры уменьшается за счет использования значения обнаружения температуры в течение определенного периода времени в качестве обнаруженного образца, тем самым уменьшая влияние интерференционного сигнала.Пространство выборки представляет собой очередь T [ n ] длиной n , и температура поля температуры предварительного нагрева определяется в соответствии с определенным временным циклом, и значение обнаружения вводится в очередь. Значение измерения температуры проходит через очередь в соответствии с правилом «первым поступил – первым обслужен», и когда значение измерения температуры находится в определенной позиции очереди T [ i ] (0< i < n ), соответствующий вес равен P [ i ].
Учитывая, что изменение температуры в поле температуры предварительного нагрева является относительно медленным процессом, значение определения температуры также изменяется относительно плавно. Поэтому сглаживающий фильтр предназначен для реализации сглаживающей фильтрации на обнаруженном сигнале температуры, и влияние каждого значения обнаружения температуры на определение температуры уменьшается за счет использования значения обнаружения температуры в течение определенного периода времени в качестве обнаруженного образца, тем самым уменьшая влияние интерференционного сигнала.Пространство выборки представляет собой очередь T [ n ] длиной n , и температура поля температуры предварительного нагрева определяется в соответствии с определенным временным циклом, и значение обнаружения вводится в очередь. Значение измерения температуры проходит через очередь в соответствии с правилом «первым поступил – первым обслужен», и когда значение измерения температуры находится в определенной позиции очереди T [ i ] (0< i < n ), соответствующий вес равен P [ i ]. Температуру обнаружения можно получить взвешенным усреднением, а метод расчета показан в формуле (1.48):
Температуру обнаружения можно получить взвешенным усреднением, а метод расчета показан в формуле (1.48): Влияние любого значения определения температуры на общее измерение температуры будет уменьшено, но в то же время увеличится задержка управления системой контроля температуры. При сглаживающей фильтрации измеренных значений можно в принципе исключить влияние незначительных колебаний температуры на температуру системы предварительного нагрева. На практике значение n не может быть слишком большим. Если значение n слишком велико, задержка управления всей системой контроля температуры будет слишком большой для достижения хорошего эффекта управления.
Влияние любого значения определения температуры на общее измерение температуры будет уменьшено, но в то же время увеличится задержка управления системой контроля температуры. При сглаживающей фильтрации измеренных значений можно в принципе исключить влияние незначительных колебаний температуры на температуру системы предварительного нагрева. На практике значение n не может быть слишком большим. Если значение n слишком велико, задержка управления всей системой контроля температуры будет слишком большой для достижения хорошего эффекта управления. Когда разница между значением обнаружения Tm и текущей средневзвешенной температурой T c больше, чем M , считается, что текущее значение обнаружения подвергается воздействию помех, которые классифицируются как недостоверные. Если разница находится в пределах порогового диапазона, очередь значений определения температуры обновляется, и в качестве текущего значения измерения температуры получается средневзвешенное значение. В то же время во время работы системы селективного лазерного спекания существует разумный диапазон температуры предварительного нагрева.Когда температура выходит за пределы диапазона, можно считать, что сигнал помех отфильтрован.
Когда разница между значением обнаружения Tm и текущей средневзвешенной температурой T c больше, чем M , считается, что текущее значение обнаружения подвергается воздействию помех, которые классифицируются как недостоверные. Если разница находится в пределах порогового диапазона, очередь значений определения температуры обновляется, и в качестве текущего значения измерения температуры получается средневзвешенное значение. В то же время во время работы системы селективного лазерного спекания существует разумный диапазон температуры предварительного нагрева.Когда температура выходит за пределы диапазона, можно считать, что сигнал помех отфильтрован.
Главная | Общество систем управления IEEE
Биография
 степень в области системоведения и математики Вашингтонского университета в Сент-Луисе, Сент-Луис, Миссури, США, в 1996 г. степень доктора философии. степень в области систем искусственного интеллекта Университета Анконы в 1997 году и степень доктора философии.наук степень в области системных наук и математики Вашингтонского университета в Сент-Луисе в 2000 году.
степень в области системоведения и математики Вашингтонского университета в Сент-Луисе, Сент-Луис, Миссури, США, в 1996 г. степень доктора философии. степень в области систем искусственного интеллекта Университета Анконы в 1997 году и степень доктора философии.наук степень в области системных наук и математики Вашингтонского университета в Сент-Луисе в 2000 году. Он является автором или соавтором более 150 статей в журналах, материалов международных конференций и глав в книгах, а также соавтором книги «Надежное автономное руководство: подход к внутренней модели» (Springer-Verlag). Его исследовательские интересы находятся на пересечении методологических аспектов нелинейной, адаптивной и геометрической теории управления с передовыми приложениями в аэрокосмических и морских системах, жидкостных системах, робототехнике и автомобилестроении.
Он является автором или соавтором более 150 статей в журналах, материалов международных конференций и глав в книгах, а также соавтором книги «Надежное автономное руководство: подход к внутренней модели» (Springer-Verlag). Его исследовательские интересы находятся на пересечении методологических аспектов нелинейной, адаптивной и геометрической теории управления с передовыми приложениями в аэрокосмических и морских системах, жидкостных системах, робототехнике и автомобилестроении. Он работал главным редактором 53-го и 51-го IEEE CDC, а также ACC 2017 года. Он был заслуженным лектором Общества систем управления IEEE (CSS) и выступал с полупленарными лекциями на 8-м симпозиуме IFAC по нелинейным системам управления и на Китайской конференции по управлению и принятию решений в 2011 году. В настоящее время он является главным редактором журнала IEEE Transactions on Control Systems Technology , а также входит в редакционные коллегии IEEE CSS и IFAC. Он является бывшим AE транзакций IEEE по технологии систем управления , Automatica и International Journal of Robust and Nonlinear Control .Он будет председателем программы ACC 2019 года, а в настоящее время является генеральным сопредседателем CDC IEEE 2022 года.
Он работал главным редактором 53-го и 51-го IEEE CDC, а также ACC 2017 года. Он был заслуженным лектором Общества систем управления IEEE (CSS) и выступал с полупленарными лекциями на 8-м симпозиуме IFAC по нелинейным системам управления и на Китайской конференции по управлению и принятию решений в 2011 году. В настоящее время он является главным редактором журнала IEEE Transactions on Control Systems Technology , а также входит в редакционные коллегии IEEE CSS и IFAC. Он является бывшим AE транзакций IEEE по технологии систем управления , Automatica и International Journal of Robust and Nonlinear Control .Он будет председателем программы ACC 2019 года, а в настоящее время является генеральным сопредседателем CDC IEEE 2022 года. границ | Явное ощущение действия в ситуации автоматического управления: эффекты целенаправленного действия и постепенное появление результата
Введение
 ; Хаггард и Шамбон, 2012).В настоящее время люди часто используют инструменты для управления внешними событиями и выполнения многих задач, таких как вождение автомобиля и управление компьютером. Когда люди используют инструменты, у них обычно возникает субъективное ощущение, что «я контролирую этот инструмент». В этом исследовании это чувство называется SoA для управления объектами.
; Хаггард и Шамбон, 2012).В настоящее время люди часто используют инструменты для управления внешними событиями и выполнения многих задач, таких как вождение автомобиля и управление компьютером. Когда люди используют инструменты, у них обычно возникает субъективное ощущение, что «я контролирую этот инструмент». В этом исследовании это чувство называется SoA для управления объектами.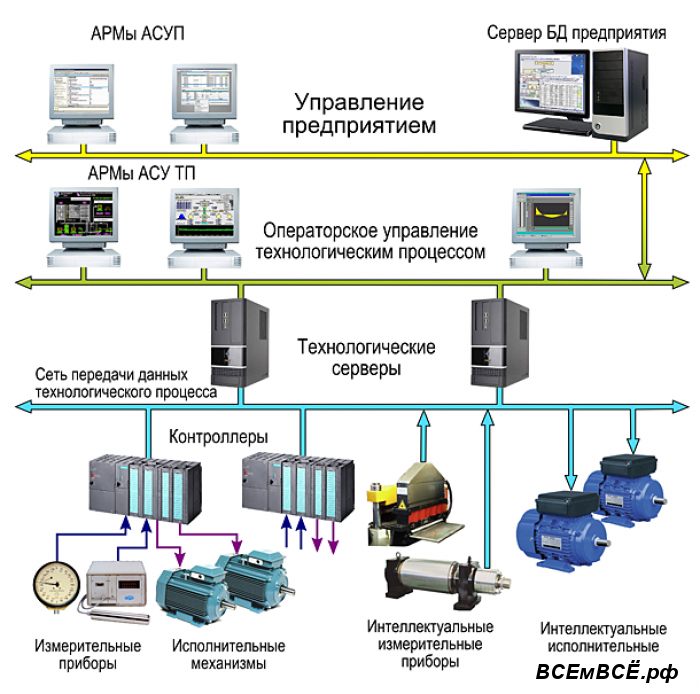 , 2015a,b), основанным на явном выводе или интерпретации и/или неявном сравнении между ожидаемая и актуальная воспринимаемая информация.
, 2015a,b), основанным на явном выводе или интерпретации и/или неявном сравнении между ожидаемая и актуальная воспринимаемая информация.

 — стоп-условие).
— стоп-условие).
Материалы и методы
Участники
Аппаратура, стимулы и задачи
 , 2007). Стимулы отображались на 46-дюймовом жидкокристаллическом дисплее (1920 × 1080 пикселей, 60 Гц). Участники отвечали нажатием клавиш на стандартной 10-клавишной панели, расположенной перед ними. Мы не указывали участникам отвечать какой-то конкретной рукой, и они нажимали клавишу ответа той рукой, которой им было проще всего пользоваться.
, 2007). Стимулы отображались на 46-дюймовом жидкокристаллическом дисплее (1920 × 1080 пикселей, 60 Гц). Участники отвечали нажатием клавиш на стандартной 10-клавишной панели, расположенной перед ними. Мы не указывали участникам отвечать какой-то конкретной рукой, и они нажимали клавишу ответа той рукой, которой им было проще всего пользоваться. Исходное положение круга было слева от левого края дисплея, поэтому участники не могли видеть круг в начале испытания. Скорость круга варьировалась от 600 до 880 пикселей/с с шагом 20 пикселей/с (т. е. 15 скоростей; 27,6–39,6°/с), чтобы уменьшить монотонность задачи.
Исходное положение круга было слева от левого края дисплея, поэтому участники не могли видеть круг в начале испытания. Скорость круга варьировалась от 600 до 880 пикселей/с с шагом 20 пикселей/с (т. е. 15 скоростей; 27,6–39,6°/с), чтобы уменьшить монотонность задачи. е. 27,0°/с 2 ), а затем останавливался. Перед экспериментом мы попросили коллег понаблюдать за движением круга (то есть за его замедлением) и подтвердили, что они считают это естественным.
е. 27,0°/с 2 ), а затем останавливался. Перед экспериментом мы попросили коллег понаблюдать за движением круга (то есть за его замедлением) и подтвердили, что они считают это естественным. Процедура
 Их голова была зафиксирована упором для подбородка. Выслушав объяснение общей процедуры экспериментального задания, они выполнили 15 тренировочных проб, в которых тормоз включался сразу после нажатия клавиши, и круг постепенно останавливался. Практические испытания были проведены для ознакомления участников с тем, как круг останавливается, и с методом ввода ответов (т.д., вводя цифры в ответном дисплее). После практических испытаний участники завершили четыре блока экспериментальных испытаний.
Их голова была зафиксирована упором для подбородка. Выслушав объяснение общей процедуры экспериментального задания, они выполнили 15 тренировочных проб, в которых тормоз включался сразу после нажатия клавиши, и круг постепенно останавливался. Практические испытания были проведены для ознакомления участников с тем, как круг останавливается, и с методом ввода ответов (т.д., вводя цифры в ответном дисплее). После практических испытаний участники завершили четыре блока экспериментальных испытаний. Некоторые попытки поймать, в которых круг останавливался фактическим нажатием клавиши (т. е. испытания с ручным управлением), были смешаны в блоке. Пробы с ручным управлением были включены в каждый экспериментальный блок по двум причинам. Во-первых, нашей целью было сравнить SoA при ручном и автоматическом управлении. Во-вторых, мы хотели, чтобы участники нажимали клавишу в каждом испытании, потому что они не чувствовали бы SoA без действия (нажатия клавиши).Фактически, из 60 испытаний в каждом блоке 75% испытаний (45 испытаний) были испытаниями с автоматическим контролем, а оставшиеся 25% испытаний (15 испытаний) были испытаниями с ручным контролем. При испытаниях с ручным управлением тормоз применялся через 100 мс после нажатия клавиши. После того, как кружок остановился, появилось отображение ответов, и участники представили субъективные оценки своего SoA. В дополнение к записи рейтинга SoA в каждом испытании мы также записывали время нажатия клавиш участниками (время, прошедшее от начала испытания до нажатия клавиши участником), время применения тормоза (время, прошедшее от начала испытания до начала торможения), время остановки круг (прошедшее время от начала испытания до остановки круга) и место остановки круга.
Некоторые попытки поймать, в которых круг останавливался фактическим нажатием клавиши (т. е. испытания с ручным управлением), были смешаны в блоке. Пробы с ручным управлением были включены в каждый экспериментальный блок по двум причинам. Во-первых, нашей целью было сравнить SoA при ручном и автоматическом управлении. Во-вторых, мы хотели, чтобы участники нажимали клавишу в каждом испытании, потому что они не чувствовали бы SoA без действия (нажатия клавиши).Фактически, из 60 испытаний в каждом блоке 75% испытаний (45 испытаний) были испытаниями с автоматическим контролем, а оставшиеся 25% испытаний (15 испытаний) были испытаниями с ручным контролем. При испытаниях с ручным управлением тормоз применялся через 100 мс после нажатия клавиши. После того, как кружок остановился, появилось отображение ответов, и участники представили субъективные оценки своего SoA. В дополнение к записи рейтинга SoA в каждом испытании мы также записывали время нажатия клавиш участниками (время, прошедшее от начала испытания до нажатия клавиши участником), время применения тормоза (время, прошедшее от начала испытания до начала торможения), время остановки круг (прошедшее время от начала испытания до остановки круга) и место остановки круга. Следующие испытания начались через 500 мс после того, как участники предоставили рейтинг на дисплее ответа.
Следующие испытания начались через 500 мс после того, как участники предоставили рейтинг на дисплее ответа. Результаты и обсуждение
Уменьшение SoA автоматическим управлением
 е. средняя оценка испытаний с ручным управлением минус оценка испытаний с автоматическим контролем).Положительные значения снижения, обнаруженные во всех условиях, предполагают, что общие оценки были выше в испытаниях с ручным управлением, чем в испытаниях с автоматическим управлением. Это был ожидаемый результат, потому что участники контролировали круг самостоятельно в испытаниях с ручным управлением, тогда как в испытаниях с автоматическим управлением они этого не делали (Berberian et al., 2012a). Дисперсионный анализ декрементов с факторами типа остановки и цели внутри участников показал, что декременты были значительно меньше в условиях постепенной остановки, чем в условиях внезапной остановки, F (1, 26) = 142.59.13, p < 0.001, η p 2 = 0.85, а также меньше в состоянии наличия цели, чем в состоянии отсутствия цели, F (1, 26) = 68.353, p < 0,001, η р 2 = 0,72. Взаимодействие было недостоверным, F (1, 26) = 0,80, p = 0,38, η p 2 = 0,03.
е. средняя оценка испытаний с ручным управлением минус оценка испытаний с автоматическим контролем).Положительные значения снижения, обнаруженные во всех условиях, предполагают, что общие оценки были выше в испытаниях с ручным управлением, чем в испытаниях с автоматическим управлением. Это был ожидаемый результат, потому что участники контролировали круг самостоятельно в испытаниях с ручным управлением, тогда как в испытаниях с автоматическим управлением они этого не делали (Berberian et al., 2012a). Дисперсионный анализ декрементов с факторами типа остановки и цели внутри участников показал, что декременты были значительно меньше в условиях постепенной остановки, чем в условиях внезапной остановки, F (1, 26) = 142.59.13, p < 0.001, η p 2 = 0.85, а также меньше в состоянии наличия цели, чем в состоянии отсутствия цели, F (1, 26) = 68.353, p < 0,001, η р 2 = 0,72. Взаимодействие было недостоверным, F (1, 26) = 0,80, p = 0,38, η p 2 = 0,03.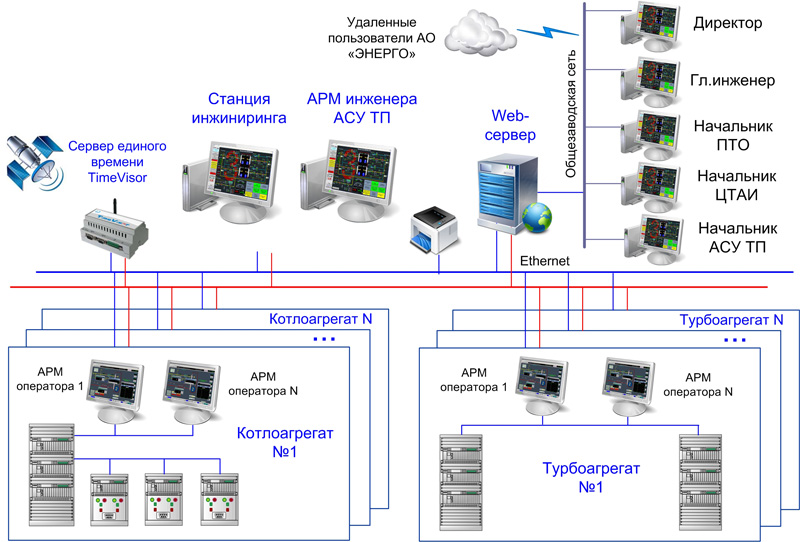 Отмечено, что значение декремента имело значительную тенденцию к большему, чем 0, даже в условиях присутствия цели и постепенной остановки, t (26) = 1.92, p = 0,067, а значения в других условиях были достоверно больше 0, t с > 9,62, p с < 0,001.
Отмечено, что значение декремента имело значительную тенденцию к большему, чем 0, даже в условиях присутствия цели и постепенной остановки, t (26) = 1.92, p = 0,067, а значения в других условиях были достоверно больше 0, t с > 9,62, p с < 0,001.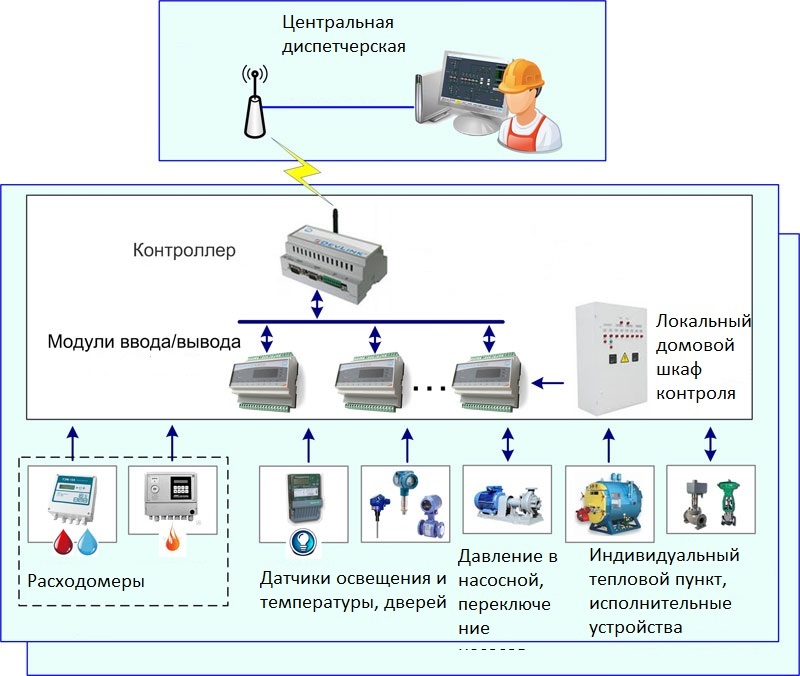
Влияние постепенной остановки и цели на рейтинги SoA в испытаниях с автоматическим и ручным управлением

 18, соответственно, не было никаких различий, имеющих отношение к настоящему расследованию. Трехстороннее взаимодействие было недостоверным, F (1, 26) = 0,80, p = 0,38, η p 2 = 0,03.
18, соответственно, не было никаких различий, имеющих отношение к настоящему расследованию. Трехстороннее взаимодействие было недостоверным, F (1, 26) = 0,80, p = 0,38, η p 2 = 0,03.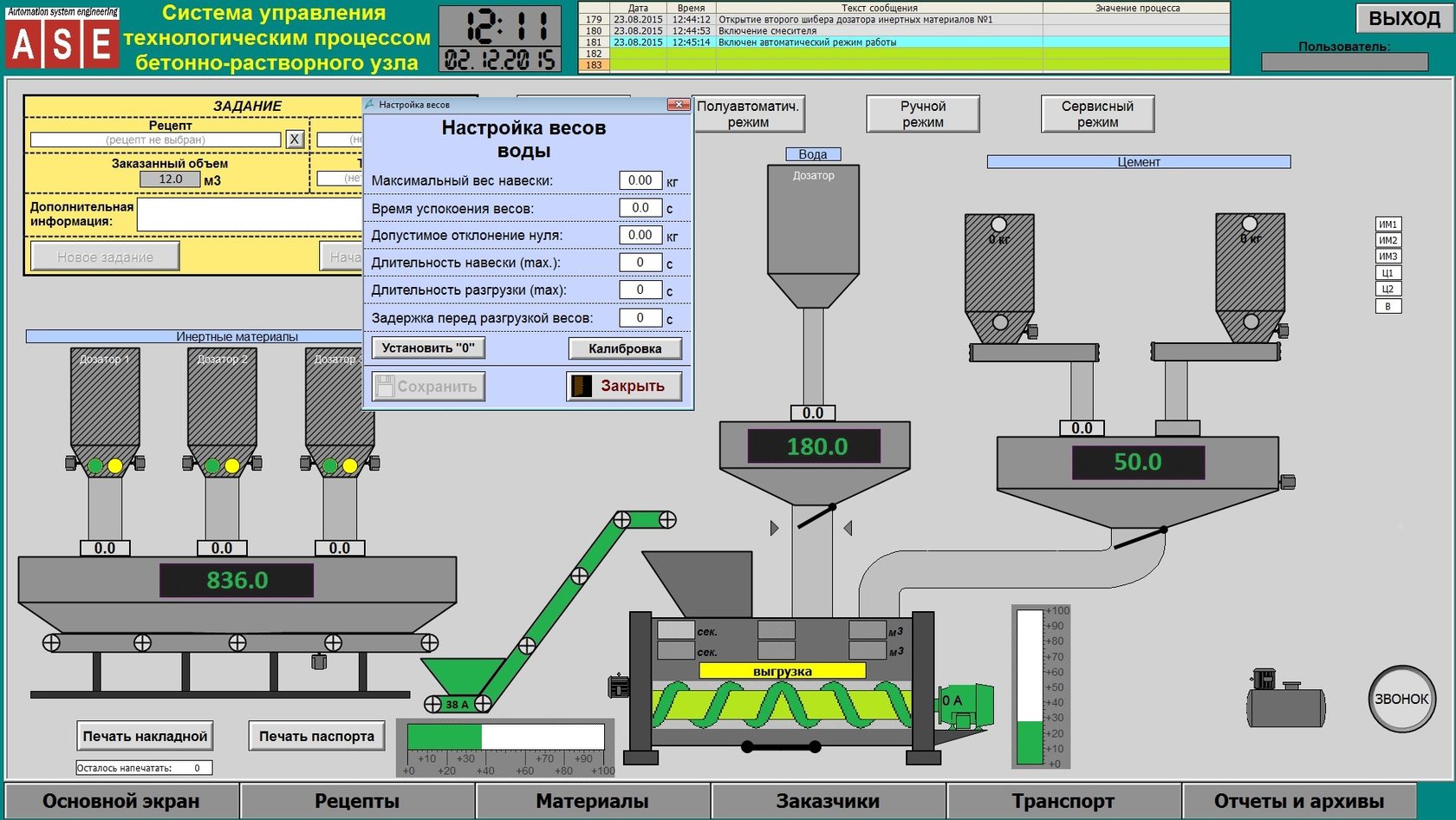 То есть оценки стали ниже для испытаний с ручным управлением, но выше для испытаний с автоматическим управлением.
То есть оценки стали ниже для испытаний с ручным управлением, но выше для испытаний с автоматическим управлением. Это означает, что более высокие когнитивные процессы, такие как вывод или интерпретация, могут быть вовлечены в определение SoA в ситуации автоматического управления.
Это означает, что более высокие когнитивные процессы, такие как вывод или интерпретация, могут быть вовлечены в определение SoA в ситуации автоматического управления. И наоборот, идеальные результаты и производительность редко достигаются в ситуациях обычного использования инструментов без посторонней помощи. Если обратная связь по производительности, вызванная наличием цели, не соответствует ожиданиям, это, вероятно, ухудшит SoA (Wen et al., 2015с).
И наоборот, идеальные результаты и производительность редко достигаются в ситуациях обычного использования инструментов без посторонней помощи. Если обратная связь по производительности, вызванная наличием цели, не соответствует ожиданиям, это, вероятно, ухудшит SoA (Wen et al., 2015с).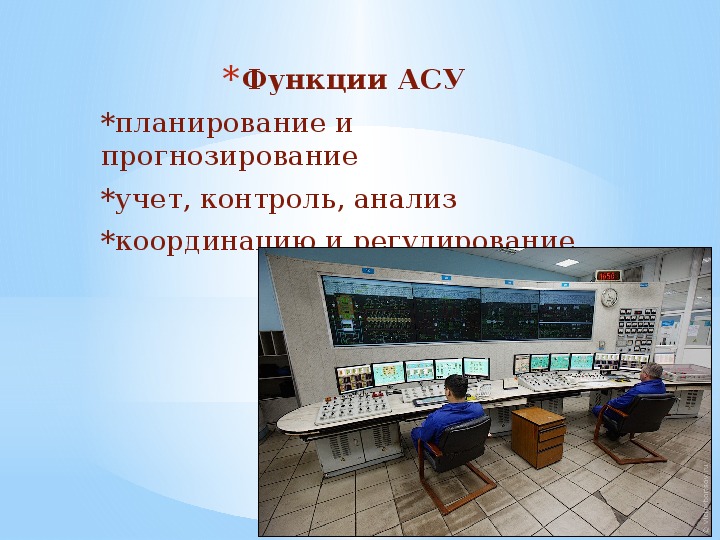 В целом, эти эффекты наличия цели могли привести к близким оценкам между испытаниями с автоматическим и ручным управлением.
В целом, эти эффекты наличия цели могли привести к близким оценкам между испытаниями с автоматическим и ручным управлением. Последующий анализ 1: Влияние видимой производительности на SoA на ситуацию с автоматическим управлением
 Пас определялся как круг, останавливающийся справа от ворот (не перекрывающийся). Был проведен ANOVA с факторами типа остановки и местоположения остановки. Значительный основной эффект расположения остановки, F (2, 52) = 55,37, p < 0,001, η p 2 = 0,68, указывает на то, что оценки SoA были выше, когда круг перекрывался с целью чем когда этого не произошло, p с < 0.001. Это говорит о том, что участники, как правило, чувствовали, что они контролируют объект самостоятельно, если задание было выполнено хорошо. Основной эффект типа остановки и, что важно, взаимодействие между расположением остановки и типом остановки были значительными, F (1, 26) = 8,21, p = 0,008, η p 2 = 0,24 ; F (2, 52) = 7,42, p = 0,002, η p 2 = 0,22 соответственно. Это указывало на то, что когда круг перекрывался с целью, SoA были сопоставимы для двух типов условий остановки, p = 0.
Пас определялся как круг, останавливающийся справа от ворот (не перекрывающийся). Был проведен ANOVA с факторами типа остановки и местоположения остановки. Значительный основной эффект расположения остановки, F (2, 52) = 55,37, p < 0,001, η p 2 = 0,68, указывает на то, что оценки SoA были выше, когда круг перекрывался с целью чем когда этого не произошло, p с < 0.001. Это говорит о том, что участники, как правило, чувствовали, что они контролируют объект самостоятельно, если задание было выполнено хорошо. Основной эффект типа остановки и, что важно, взаимодействие между расположением остановки и типом остановки были значительными, F (1, 26) = 8,21, p = 0,008, η p 2 = 0,24 ; F (2, 52) = 7,42, p = 0,002, η p 2 = 0,22 соответственно. Это указывало на то, что когда круг перекрывался с целью, SoA были сопоставимы для двух типов условий остановки, p = 0. 18, и что, когда круг не перекрывался, SoA были выше в состоянии постепенной остановки, p с < 0,015. Это означает, что SoA резко уменьшилась, когда круг не пересекался с целью в состоянии внезапной остановки. Подводя итог, можно сказать, что хорошее выполнение задачи системой автоматического управления могло заставить людей постдиктивно почувствовать, что они контролируют объект самостоятельно.
18, и что, когда круг не перекрывался, SoA были выше в состоянии постепенной остановки, p с < 0,015. Это означает, что SoA резко уменьшилась, когда круг не пересекался с целью в состоянии внезапной остановки. Подводя итог, можно сказать, что хорошее выполнение задачи системой автоматического управления могло заставить людей постдиктивно почувствовать, что они контролируют объект самостоятельно. Последующий анализ 2: Модуляция действий участников по нажатию клавиш присутствием цели в ситуации автоматического управления
 е.т. е. они должны стремиться действовать надлежащим образом для достижения своей цели в тандеме с системой автоматического управления, а не действовать свободно. Чтобы проверить, действительно ли действия участников изменились из-за наличия цели, мы сравнили время нажатия ими клавиш в зависимости от условий цели (таблица 1). Дисперсионный анализ показал, что время нажатия клавиш было более поздним в состоянии цели-настоящего, F (1, 26) = 129,53, p <0,001, η p 2 = 0.83. В результате задержка между действием и результатом стала короче в состоянии настоящего гола. Время нажатия клавиш было раньше в состоянии постепенной остановки, F (1, 26) = 25,22, p < 0,001, η p 2 = 0,49, из-за большей продолжительности между приложениями тормоз и полная остановка в режиме постепенной остановки. Важно отметить, что взаимодействие между целью и типом остановки было значительным, F (1, 26) = 19,17, p < 0.
е.т. е. они должны стремиться действовать надлежащим образом для достижения своей цели в тандеме с системой автоматического управления, а не действовать свободно. Чтобы проверить, действительно ли действия участников изменились из-за наличия цели, мы сравнили время нажатия ими клавиш в зависимости от условий цели (таблица 1). Дисперсионный анализ показал, что время нажатия клавиш было более поздним в состоянии цели-настоящего, F (1, 26) = 129,53, p <0,001, η p 2 = 0.83. В результате задержка между действием и результатом стала короче в состоянии настоящего гола. Время нажатия клавиш было раньше в состоянии постепенной остановки, F (1, 26) = 25,22, p < 0,001, η p 2 = 0,49, из-за большей продолжительности между приложениями тормоз и полная остановка в режиме постепенной остановки. Важно отметить, что взаимодействие между целью и типом остановки было значительным, F (1, 26) = 19,17, p < 0. 001, η р 2 = 0,42. Это взаимодействие указывает на то, что в состоянии присутствия цели время нажатий клавиш было раньше в состоянии постепенной остановки, p < 0,001, тогда как в состоянии отсутствия цели время нажатия клавиш не менялось в зависимости от типа остановки, p = 0,44. Таким образом, наблюдатели, как правило, действовали надлежащим образом, когда цель была видна. Следует отметить, что тайминги нажатия клавиш не отличались при ручном и автоматическом управлении, F (1, 26) = 0.29, p = 0,59, η p 2 = 0,01, подтверждая, что участники не знали заранее, были ли испытания, которые они выполняли, ручными или автоматическими.
001, η р 2 = 0,42. Это взаимодействие указывает на то, что в состоянии присутствия цели время нажатий клавиш было раньше в состоянии постепенной остановки, p < 0,001, тогда как в состоянии отсутствия цели время нажатия клавиш не менялось в зависимости от типа остановки, p = 0,44. Таким образом, наблюдатели, как правило, действовали надлежащим образом, когда цель была видна. Следует отметить, что тайминги нажатия клавиш не отличались при ручном и автоматическом управлении, F (1, 26) = 0.29, p = 0,59, η p 2 = 0,01, подтверждая, что участники не знали заранее, были ли испытания, которые они выполняли, ручными или автоматическими. Хотя это не было нашим основным интересом, мы сравнили оценки SoA между испытаниями, где нажатия клавиш происходили до и после применения тормоза.Количество попыток нажатия клавиш после замедления было больше в состоянии присутствия цели (22,1 и 10,6 попыток в условиях постепенной и внезапной остановки соответственно), чем в состоянии отсутствия цели (6,4 и 0,6 попытки в условиях соответственно) F (1, 26) = 134,20, p < 0,001, η p 2 = 0,84, а также больше в условиях плавной остановки, чем в состоянии внезапной остановки F (1, 26) = 55.24, р < 0,001, η р 2 = 0,68. В условиях отсутствия ворот участники нажимали клавишу до включения тормоза в большинстве испытаний. В условиях целевого присутствия мы сравнили SoA, когда участники нажимали клавишу до и после применения тормоза (табл. 2; данные одного участника, который никогда не нажимал клавишу после замедления в условиях внезапной остановки, были опущены).
Хотя это не было нашим основным интересом, мы сравнили оценки SoA между испытаниями, где нажатия клавиш происходили до и после применения тормоза.Количество попыток нажатия клавиш после замедления было больше в состоянии присутствия цели (22,1 и 10,6 попыток в условиях постепенной и внезапной остановки соответственно), чем в состоянии отсутствия цели (6,4 и 0,6 попытки в условиях соответственно) F (1, 26) = 134,20, p < 0,001, η p 2 = 0,84, а также больше в условиях плавной остановки, чем в состоянии внезапной остановки F (1, 26) = 55.24, р < 0,001, η р 2 = 0,68. В условиях отсутствия ворот участники нажимали клавишу до включения тормоза в большинстве испытаний. В условиях целевого присутствия мы сравнили SoA, когда участники нажимали клавишу до и после применения тормоза (табл. 2; данные одного участника, который никогда не нажимал клавишу после замедления в условиях внезапной остановки, были опущены). ). ANOVA показал, что взаимодействие между типом остановки и временем нажатия клавиши было значительным, F (1, 25) = 56.75, р < 0,001, η р 2 = 0,69. Оценки SoA уменьшались, когда участники нажимали клавишу после того, как круг замедлился (т. е. остановился) в состоянии внезапной остановки, 90 353 p 90 354 < 0,001. Напротив, рейтинги SoA не различались в условиях постепенной остановки, p = 0,15. Участники не знали точного времени торможения и склонны приписывать результат своим действиям.
). ANOVA показал, что взаимодействие между типом остановки и временем нажатия клавиши было значительным, F (1, 25) = 56.75, р < 0,001, η р 2 = 0,69. Оценки SoA уменьшались, когда участники нажимали клавишу после того, как круг замедлился (т. е. остановился) в состоянии внезапной остановки, 90 353 p 90 354 < 0,001. Напротив, рейтинги SoA не различались в условиях постепенной остановки, p = 0,15. Участники не знали точного времени торможения и склонны приписывать результат своим действиям. Участники, возможно, восприняли, что их нажатие клавиш и остановка круга произошли одновременно, и, таким образом, они могли оценить свою способность остановить круг постдиктивно.Следует отметить, что диапазон SoA у участников был очень большим: от 1 (отсутствие SoA) до 87,5 (сильный SoA). Индивидуальные различия в чувствительности восприятия времени и/или степени самоатрибуции результата могли повлиять на SoA. Это остается захватывающей возможностью для изучения в будущих исследованиях.
Участники, возможно, восприняли, что их нажатие клавиш и остановка круга произошли одновременно, и, таким образом, они могли оценить свою способность остановить круг постдиктивно.Следует отметить, что диапазон SoA у участников был очень большим: от 1 (отсутствие SoA) до 87,5 (сильный SoA). Индивидуальные различия в чувствительности восприятия времени и/или степени самоатрибуции результата могли повлиять на SoA. Это остается захватывающей возможностью для изучения в будущих исследованиях. Общее обсуждение
 В результате они иллюзорно приписывают результат своим намеренным действиям, что приводит к ощущению очевидной общей цели между системой и наблюдателем.Кроме того, наблюдатели могут оценить выполнение своей задачи при наличии цели. Результат обычно обеспечивает относительно хорошее выполнение задачи, если система запрограммирована на достижение цели. Хорошее выполнение задачи может заставить их почувствовать, что они контролируют объект, и, возможно, приписать результат своим собственным действиям. Следовательно, характеристики целенаправленного действия и постепенного появления результата могут быть эффективными для поддержания иллюзорного SoA в ситуации автоматического управления.
В результате они иллюзорно приписывают результат своим намеренным действиям, что приводит к ощущению очевидной общей цели между системой и наблюдателем.Кроме того, наблюдатели могут оценить выполнение своей задачи при наличии цели. Результат обычно обеспечивает относительно хорошее выполнение задачи, если система запрограммирована на достижение цели. Хорошее выполнение задачи может заставить их почувствовать, что они контролируют объект, и, возможно, приписать результат своим собственным действиям. Следовательно, характеристики целенаправленного действия и постепенного появления результата могут быть эффективными для поддержания иллюзорного SoA в ситуации автоматического управления.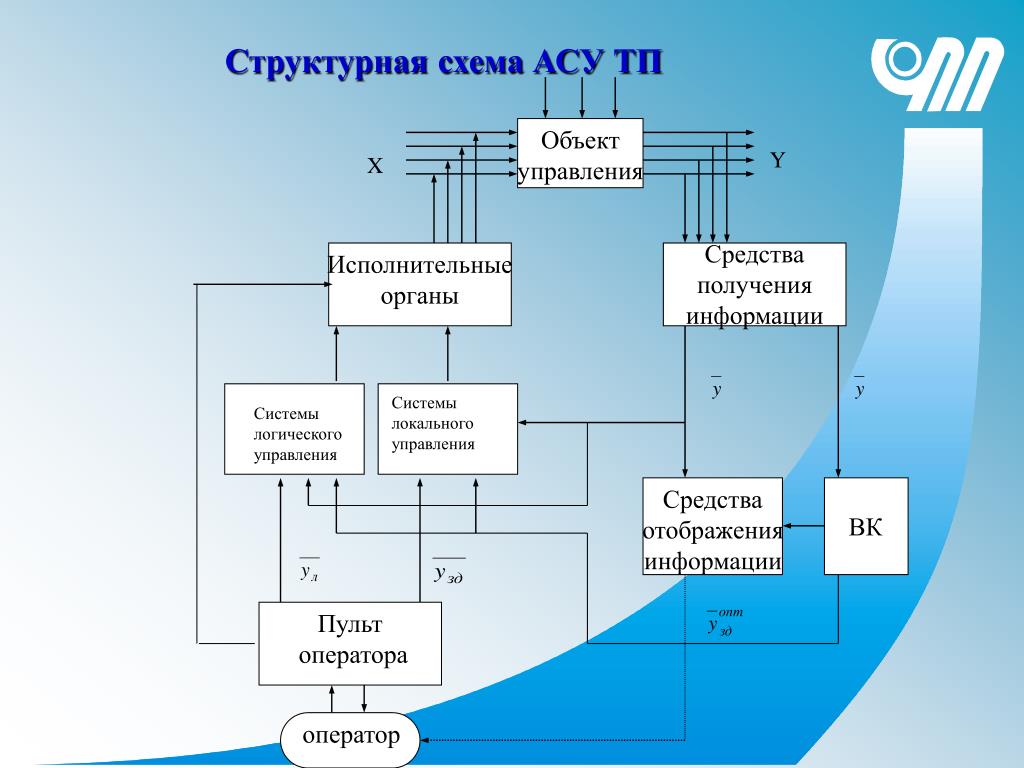 , непротиворечивость указывает на то, что действие и следствие согласованы, а исключительность указывает на то, что действие является наиболее вероятной причиной следствия. В случае автоматического управления эти условия фактически не выполняются.Однако, когда эффект проявляется постепенно, даже если эффект возникает до действия, наблюдатели часто не могут его распознать, и в результате приоритет может быть удовлетворен иллюзорно. Когда цель видна, наблюдатели развивают намерение достичь цели самостоятельно и действовать надлежащим образом для достижения цели; другими словами, согласованность и исключительность могут быть иллюзорно удовлетворены. Таким образом, наблюдатели могут чувствовать сильную, но иллюзорную SoA. Иллюзорный SoA в ситуации автоматического управления может быть сгенерирован процессом реконструкции, основанным на выводе или интерпретации (см.Хаггард, 2005 г.; Меткалф и Грин, 2007 г.; Вен и др., 2015а).
, непротиворечивость указывает на то, что действие и следствие согласованы, а исключительность указывает на то, что действие является наиболее вероятной причиной следствия. В случае автоматического управления эти условия фактически не выполняются.Однако, когда эффект проявляется постепенно, даже если эффект возникает до действия, наблюдатели часто не могут его распознать, и в результате приоритет может быть удовлетворен иллюзорно. Когда цель видна, наблюдатели развивают намерение достичь цели самостоятельно и действовать надлежащим образом для достижения цели; другими словами, согласованность и исключительность могут быть иллюзорно удовлетворены. Таким образом, наблюдатели могут чувствовать сильную, но иллюзорную SoA. Иллюзорный SoA в ситуации автоматического управления может быть сгенерирован процессом реконструкции, основанным на выводе или интерпретации (см.Хаггард, 2005 г.; Меткалф и Грин, 2007 г.; Вен и др., 2015а). В этом исследовании мы смешали испытания с ручным контролем и испытания с автоматическим контролем в одном блоке. Сочетание испытаний могло быть необходимо для того, чтобы наблюдатели могли приписать результат управления своим действиям, потому что они не знали абсолютно, что система всегда контролирует объект. Если бы наблюдатели чувствовали, что они могли иногда контролировать объект самостоятельно, у них была бы возможность связать свое действие и результат.Эта двусмысленность может быть существенной для иллюзорного обслуживания SoA.
В этом исследовании мы смешали испытания с ручным контролем и испытания с автоматическим контролем в одном блоке. Сочетание испытаний могло быть необходимо для того, чтобы наблюдатели могли приписать результат управления своим действиям, потому что они не знали абсолютно, что система всегда контролирует объект. Если бы наблюдатели чувствовали, что они могли иногда контролировать объект самостоятельно, у них была бы возможность связать свое действие и результат.Эта двусмысленность может быть существенной для иллюзорного обслуживания SoA.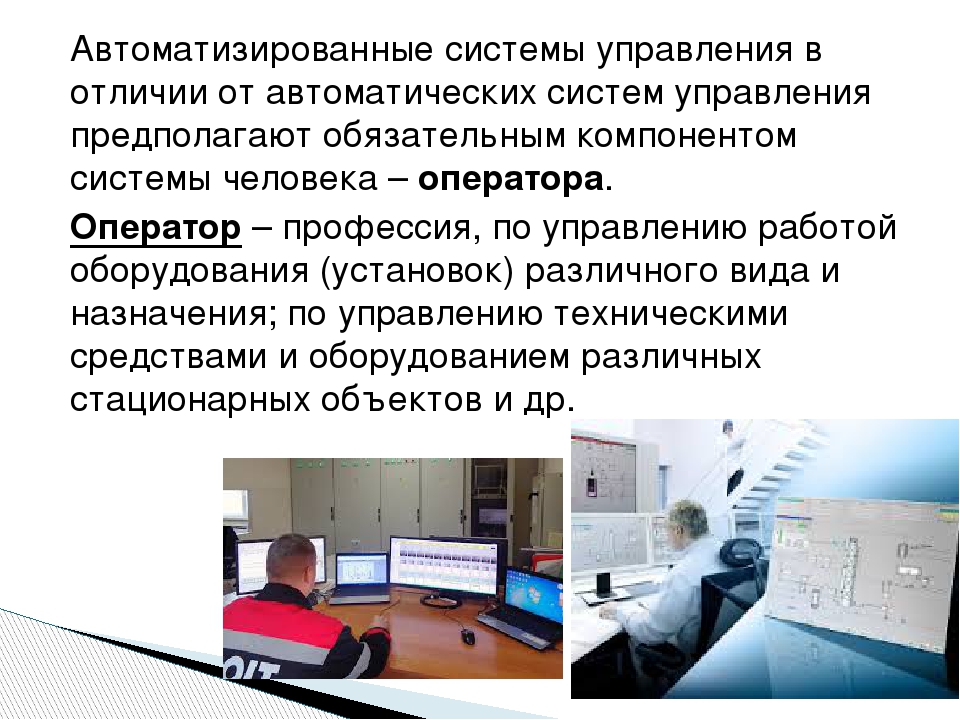 например, чтение книг, игры и сон), а не вождение автомобиля (например, хватание за ручку и нажатие на педали). Более того, результат работы системы автоматизации, который, казалось, соответствовал намерению водителя, может привести к явному разделению целей между системой и водителем. Такое разделение целей имеет решающее значение для поддержания SoA. Конечно, невозможно предсказать намерения водителя в каждой дорожной ситуации. Однако намерение водителя контролировать ситуацию можно понять в ограниченных дорожных ситуациях, таких как движение вперед по прямой, поворот влево или вправо или торможение, среди прочего.Вероятность того, что намерение водителя соответствует результату, достигнутому системой, увеличивается в определенных ситуациях вождения. Когда водители четко знают функции системы автоматизации, очевидное соответствие между их намерениями и фактическими результатами может заставить их почувствовать, что система достигает целей, которых они ожидают достичь. Они могут чувствовать сильную SoA, даже если знают, что не контролируют машину.
например, чтение книг, игры и сон), а не вождение автомобиля (например, хватание за ручку и нажатие на педали). Более того, результат работы системы автоматизации, который, казалось, соответствовал намерению водителя, может привести к явному разделению целей между системой и водителем. Такое разделение целей имеет решающее значение для поддержания SoA. Конечно, невозможно предсказать намерения водителя в каждой дорожной ситуации. Однако намерение водителя контролировать ситуацию можно понять в ограниченных дорожных ситуациях, таких как движение вперед по прямой, поворот влево или вправо или торможение, среди прочего.Вероятность того, что намерение водителя соответствует результату, достигнутому системой, увеличивается в определенных ситуациях вождения. Когда водители четко знают функции системы автоматизации, очевидное соответствие между их намерениями и фактическими результатами может заставить их почувствовать, что система достигает целей, которых они ожидают достичь. Они могут чувствовать сильную SoA, даже если знают, что не контролируют машину. Автоматической системе может потребоваться полное достижение цели.Например, когда автономный автомобиль останавливается точно на стоп-линии, водитель может чувствовать комфорт и сильный SoA. Мы считаем, что это важные подсказки для улучшения систем автономного вождения. Необходимы дальнейшие исследования для выяснения эффективности этих факторов.
Автоматической системе может потребоваться полное достижение цели.Например, когда автономный автомобиль останавливается точно на стоп-линии, водитель может чувствовать комфорт и сильный SoA. Мы считаем, что это важные подсказки для улучшения систем автономного вождения. Необходимы дальнейшие исследования для выяснения эффективности этих факторов. Мы предполагаем, что манипуляторы могут чувствовать иллюзорную СО, не предприняв реальных действий, если результат полностью совпадает с их намерением.Если манипуляторы твердо убеждены в том, что система понимает их намерение (цель) и управляет объектом вместо них, они должны чувствовать иллюзорную СО для управления объектом. Вера в то, что система действует от имени манипулятора, может быть одним из источников иллюзорного SoA в ситуации автоматического управления. Мы также предполагаем, что проблема производительности «вне цикла» может быть решена, даже если манипуляторы только намереваются, а не фактически манипулируют инструментом, что является новой проблемой для дальнейшего изучения.
Мы предполагаем, что манипуляторы могут чувствовать иллюзорную СО, не предприняв реальных действий, если результат полностью совпадает с их намерением.Если манипуляторы твердо убеждены в том, что система понимает их намерение (цель) и управляет объектом вместо них, они должны чувствовать иллюзорную СО для управления объектом. Вера в то, что система действует от имени манипулятора, может быть одним из источников иллюзорного SoA в ситуации автоматического управления. Мы также предполагаем, что проблема производительности «вне цикла» может быть решена, даже если манипуляторы только намереваются, а не фактически манипулируют инструментом, что является новой проблемой для дальнейшего изучения.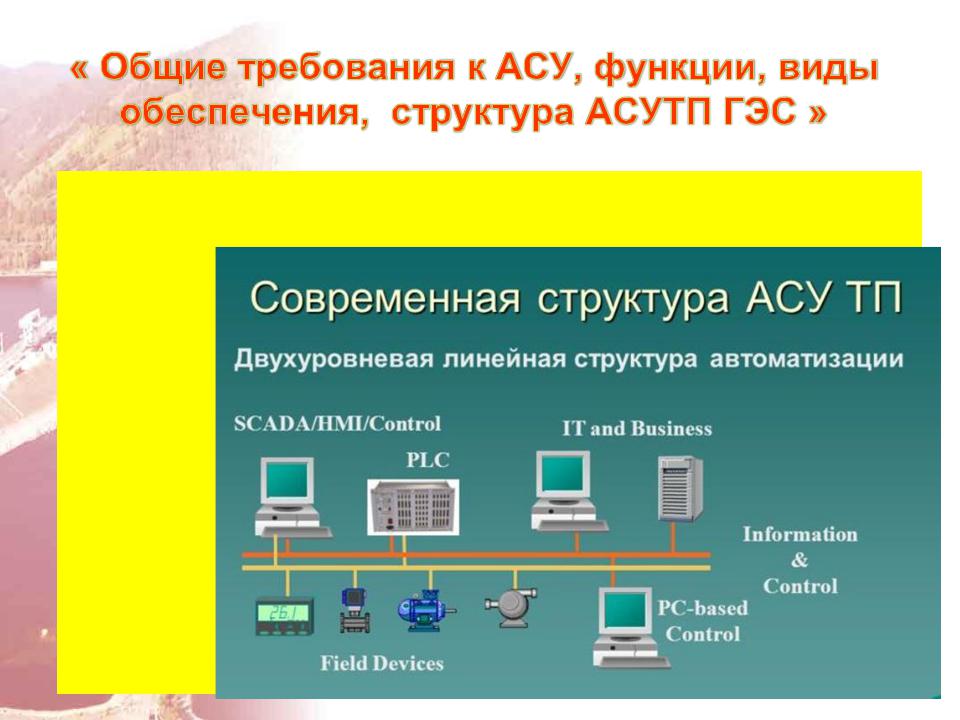 Этот метод требует ответов участников и, следовательно, включает в себя постоянные перерывы в действиях (см. Wen et al., 2019). Чтобы полностью понять SoA в ситуации автоматического управления, необходимо изучить SoA в ситуации непрерывного управления (т.г., дорожная ситуация). Тем не менее, настоящее исследование дало некоторые предложения для изучения этого вопроса.
Этот метод требует ответов участников и, следовательно, включает в себя постоянные перерывы в действиях (см. Wen et al., 2019). Чтобы полностью понять SoA в ситуации автоматического управления, необходимо изучить SoA в ситуации непрерывного управления (т.г., дорожная ситуация). Тем не менее, настоящее исследование дало некоторые предложения для изучения этого вопроса. , 2019). Поэтому важно изучить другие типы управления SoA, чтобы полностью понять SoA в автоматическом управлении.
, 2019). Поэтому важно изучить другие типы управления SoA, чтобы полностью понять SoA в автоматическом управлении. С другой стороны, у иллюзии поддержки SoA есть и негативный аспект. Например, иллюзорная SoA без фактического контроля может привести к небрежному контролирующему поведению, ведущему к несчастным случаям. При всестороннем обсуждении SoA в ситуациях автоматического управления необходимо сосредоточить внимание на положительных и отрицательных аспектах.Более того, при рассмотрении технологии автоматизации в сложных ситуациях также важно обсудить этические вопросы, такие как личная ответственность за неблагоприятные результаты, производимые системой, когда человек чувствует иллюзорность SoA. Многие вопросы в этой области еще предстоит исследовать. Мы считаем, что результаты этого исследования предоставляют предварительные данные об актуальности SoA в технологии автоматизации (см. Wen et al., 2019).
С другой стороны, у иллюзии поддержки SoA есть и негативный аспект. Например, иллюзорная SoA без фактического контроля может привести к небрежному контролирующему поведению, ведущему к несчастным случаям. При всестороннем обсуждении SoA в ситуациях автоматического управления необходимо сосредоточить внимание на положительных и отрицательных аспектах.Более того, при рассмотрении технологии автоматизации в сложных ситуациях также важно обсудить этические вопросы, такие как личная ответственность за неблагоприятные результаты, производимые системой, когда человек чувствует иллюзорность SoA. Многие вопросы в этой области еще предстоит исследовать. Мы считаем, что результаты этого исследования предоставляют предварительные данные об актуальности SoA в технологии автоматизации (см. Wen et al., 2019). Сопровождение SoA может быть необходимо, чтобы избежать проблем с производительностью «вне цикла». Хотя необходимы дополнительные исследования, наши результаты должны быть применимы при разработке усовершенствованных систем автоматического управления и служить ориентиром для обсуждения технологий автоматизации.
Сопровождение SoA может быть необходимо, чтобы избежать проблем с производительностью «вне цикла». Хотя необходимы дополнительные исследования, наши результаты должны быть применимы при разработке усовершенствованных систем автоматического управления и служить ориентиром для обсуждения технологий автоматизации. Заявление о доступности данных
Заявление об этике
Вклад авторов
Финансирование
 Спонсор не участвовал в разработке исследования, сборе, анализе, интерпретации данных, написании этой статьи или решении представить ее для публикации.
Спонсор не участвовал в разработке исследования, сборе, анализе, интерпретации данных, написании этой статьи или решении представить ее для публикации. Конфликт интересов
Благодарности
Дополнительный материал
Ссылки
 дои: 10.1101/519934
дои: 10.1101/519934 Факторы 37, 381–394.
Факторы 37, 381–394. Б., и Эндсли, М. Р. (1997). Проблемы внеконтурной работы и использование промежуточных уровней автоматизации для улучшения функционирования и безопасности системы управления. Процесс. Саф. прог. 16, 126–131. doi: 10.1002/prs.680160304
Б., и Эндсли, М. Р. (1997). Проблемы внеконтурной работы и использование промежуточных уровней автоматизации для улучшения функционирования и безопасности системы управления. Процесс. Саф. прог. 16, 126–131. doi: 10.1002/prs.680160304 Познание 94, 241–255. doi: 10.1016/j.cognition.2004.04.003
Познание 94, 241–255. doi: 10.1016/j.cognition.2004.04.003 , Куроки Ю. и Асама Х. (2019). Чувство свободы в управлении автоматизацией. Перед. Психол. 10:2691. doi: 10.3389/fpsyg.2019.02691
, Куроки Ю. и Асама Х. (2019). Чувство свободы в управлении автоматизацией. Перед. Психол. 10:2691. doi: 10.3389/fpsyg.2019.02691 , Флеминг С. М. и Хаггард П. (2010). Подсознательный прайминг действий влияет на чувство контроля над последствиями действия. Познание 115, 26–38. doi: 10.1016/j.cognition.2009.10.016
, Флеминг С. М. и Хаггард П. (2010). Подсознательный прайминг действий влияет на чувство контроля над последствиями действия. Познание 115, 26–38. doi: 10.1016/j.cognition.2009.10.016 Системы управления | Электротехника и вычислительная техника
 Более того, принципы управления с обратной связью и теория систем приобретают все большее значение в самых разных областях, помимо инженерных, таких как экономика, бизнес, биология и политология. Обучение автоматическому управлению многогранно. Основные принципы динамических характеристик системы, свойства обратной связи и опыт работы с методологиями проектирования систем управления должны быть подчеркнуты в сильной программе управления бакалавриата. Также важными являются лабораторный опыт, хороший опыт в области математики, информатики и инженерии, а также введение в смежные области, такие как связь и обработка сигналов.
Более того, принципы управления с обратной связью и теория систем приобретают все большее значение в самых разных областях, помимо инженерных, таких как экономика, бизнес, биология и политология. Обучение автоматическому управлению многогранно. Основные принципы динамических характеристик системы, свойства обратной связи и опыт работы с методологиями проектирования систем управления должны быть подчеркнуты в сильной программе управления бакалавриата. Также важными являются лабораторный опыт, хороший опыт в области математики, информатики и инженерии, а также введение в смежные области, такие как связь и обработка сигналов. Для студентов, планирующих обучение в магистратуре по системам управления:
 ЕСЕ 490 настоятельно рекомендуется. Многие студенты проходят курс магистратуры первого года обучения ECE 515 – требуется петиция, которая обычно утверждается в зависимости от общего положения студента.Наконец, найдите наставника среди преподавателей (вы можете запросить официальную смену наставника) для получения дополнительных советов по курсам и для участия в исследованиях бакалавриата.
ЕСЕ 490 настоятельно рекомендуется. Многие студенты проходят курс магистратуры первого года обучения ECE 515 – требуется петиция, которая обычно утверждается в зависимости от общего положения студента.Наконец, найдите наставника среди преподавателей (вы можете запросить официальную смену наставника) для получения дополнительных советов по курсам и для участия в исследованиях бакалавриата. Рекомендуемая последовательность курсов в зоне управления:
Автоматизированные системы управления зданием — Автоматические системы управления
Автоматическая система управления зданием
 Современные интеллектуальные системы автоматизации эффективны, просты в программировании и разработаны для удовлетворения рабочих потребностей предприятий в самых разных отраслях.
Современные интеллектуальные системы автоматизации эффективны, просты в программировании и разработаны для удовлетворения рабочих потребностей предприятий в самых разных отраслях.
Системы управления домашней автоматикой: фотографии, варианты, советы и идеи


 Их даже можно настроить так, чтобы они автоматически реагировали на изменения погоды, увеличивая полив в засушливые периоды и отключаясь для экономии воды в периоды сильных дождей.
Их даже можно настроить так, чтобы они автоматически реагировали на изменения погоды, увеличивая полив в засушливые периоды и отключаясь для экономии воды в периоды сильных дождей. Автоматическое управление | Электротехника и вычислительная техника
Автоматическое управление
Уровень курса
Единицы
Необходимые условия
Тексты курсов
 C. и Р. Х. Бишоп. Современные системы управления . 12-е изд. Прентис Холл, 2011.
C. и Р. Х. Бишоп. Современные системы управления . 12-е изд. Прентис Холл, 2011. Расписание
Описание курса
Результаты обучения
Темы курса
Связь с результатами учащихся
Программа подготовлена
