
Баланс мощностей для цепей постоянного тока — понятное объяснение | Pro Физику
Баланс мощностей: сумма мощностей, выделяемых источниками, равна сумме мощностей, потребляемых приемниками.
А теперь давайте рассмотрим по порядку и на конкретных примерах, что такое баланс мощностей и как он составляется для различных цепей постоянного тока (о балансе мощностей цепи переменного тока, мы поговорим позже).
Чтобы было более понятно, сразу рассмотрим пример.
Рисунок 1 — Электрическая схема цепи, состоящая из одного резистора и одного источника напряжения
Имеется схема цепи, изображенная на рисунке 1. Дано значение ЭДС E и сопротивление резистора R. Требуется составить баланс мощностей для данной цепи.
Для начала нужно определить ток:
I=E/R=10/10=1 (A)
Следующим шагом определим мощности источника и приемника. Поскольку это цепь постоянного тока (в цепи действует постоянный источник напряжения), то мощность, отдаваемая источником и мощность, потребляемая приемником, (в данной схеме цепи, приемник только один – это резистор R ) будет активной.
Определим активную мощность, отдаваемую источником напряжения E:
Pист=I·E=1·10=10 (Вт)(Единица измерения активной мощности «Ватт»)
Активная мощность обозначается буквой P. Индекс “ист” сокращенно от “источников”.
Определяем активную мощность приемника:
Рисунок 2 — Формула активной мощности приемника
Для определения активной мощности источника, применяется формула произведения тока I через источник на величину E источника. Для определения активной мощности приемника, применяется формула произведения квадрата тока через приемник (в данном случае приемником является резистор R) на сопротивление этого резистора. Если ранее было известно напряжение резистора, то можно применить формулу для нахождения активной мощности приемника:
Pпр=Ur·I (Индекс “пр” сокращенно от “приемников”).
Таким образом, в источниках напряжения (ЭДС) происходит генерация электрической энергии, а в элементе R происходит потребление энергии. Электрическая энергия преобразуется в тепловую, т. е. резистор R потребляет электрическую энергию, отдаваемую источником E.
е. резистор R потребляет электрическую энергию, отдаваемую источником E.
Отсюда следует правило баланса мощностей:
Сумма мощностей, выделяемых источниками, равна сумме мощностей, потребляемых приемниками.
Для нашей задачи, схема цепи которой изображена на рисунке 1, запишем баланс активных мощностей:
Pист=Pпр
10 (Вт)=10 (Вт). Баланс выполняется.
Для расчета электрических цепей и проверки правильности найденных токов, делаем проверку баланса мощностей. Если полученная мощность приемников отличается от полученной мощности источников, то баланс мощностей нарушается. Это говорит о том, что токи в цепи найдены неверно. Погрешность баланса мощностей может составлять до 3%.
Т. е отличие между Pист и Pпр не должно превышать 3%. Для определения погрешности, пользуются следующей формулой:
Рисунок 3 — Погрешность баланса мощностей
В данном случае, погрешность равна нулю и баланс выполняется.
Рассмотрим следующий пример.
Требуется составить баланс мощностей для цепи, изображенной на рисунке 4.
Рисунок 4 — Электрическая схема цепи для составления баланса мощностей
Для начала определим ток в цепи. Резисторы R1 и R2 включены последовательно. Следовательно, общее сопротивление цепи, запишется как:
Rобщ=R1+R2=10+10=20 (Ом)
Тогда ток по закону Ома:
Рисунок 5 — Ток по закону Ома для цепи, изображенной на рисунке 4
Так как все ЭДС и сопротивления известны, а ток в цепи мы нашли, определим активную мощность источников и приемников.
Рисунок 6 — Активная мощность приемников для цепи, изображенной на рисунке 4
Активная мощность, потребляемая резисторами, составляет 20 (Вт) Определим активную мощность источников.
Pист=I·E1+I·E3-I·E2=1·10+1·30-1·20=20 (Вт)
Активная мощность, отдаваемая всеми источниками ЭДС, составляет 20 (Вт)
Запишем баланс мощностей для данной цепи:
Рисунок 7 — Баланс мощностей для цепи, изображенной на рисунке 4
Баланс мощностей выполняется, погрешность равна нулю.
В левой части равенства получили сумму мощностей, потребляемых приемниками, а в правой части равенства получили сумму мощностей, генерируемых источниками. В данном случае ЭДС E2 работает как приемник, например, аккумулятор в режиме зарядки.
Если действие ЭДС E и тока через Eсовпадают по направлению, то произведение E·I берется со знаком “+”, если не совпадает, то “-“. В нашей цепи I и E2 направлены навстречу друг другу, поэтому произведение I·E2 взяли с минусом.
Баланс мощностей с источниками тока, мы рассмотрим в следующих статьях.
Если понравилась статья, подписывайтесь на канал и не пропускайте новые публикации.
Читайте также:
1. Как электроэнергия передается от электростанций до наших домов;
2. Что такое электрический ток — простыми словами;
7.Баланс мощностей в цепях постоянного тока. Пример расчета.

Баланс
мощностей.
Для
любой электрической цепи суммарная
мощность Ри, развиваемая источниками
электрической энергии (источниками
тока и ЭДС), равна суммарной мощности
Рп, расходуемой потребителями
(резисторами).
РR
= U×I = R∙I 2 = U 2/R – мощность, рассеиваемая
резистором.
РЕ
= ±Е∙I – мощность источника ЭДС.
РJ
= ± UJ ×J – мощность источника тока.
Мощности,
рассеваемые резисторами, всегда
положительны, в то время как мощности
источников электрической энергии, в
зависимости от соотношения направлений
падения напряжения и тока в них, могут
иметь любой знак. Если направление
протекания тока через источник
противоположно направлению падения
напряжения на нём, то мощность источника
положительна, т.е. он отдаёт энергию в
электрическую цепь. В противном случае
мощность источника отрицательна, и он
является потребителем электрической
энергии. Следует заметить, что направление
Следует заметить, что направление
падения напряжения всегда противоположно
направлению ЭДС, поэтому для источника
ЭДС условием положительной мощности
является совпадение направлений ЭДС и
тока.
8. Метод узловых напряжений. Его применение в схемах с идеальными источниками э.Д.С. Пример.
Заключается
в опред на основании 1 закона К потенц
в узлах эл цепи относ некоторого баз
узла. Баз узел в общем случае выбир
произвольно, потенциал этого узла =0.
Разности потенц- узловым
напряжением.
Nур=Ny-1-Nэ.д.с.
Узло
напр U10=1-0.
Полож напряж узл напр указывается
стрелкой от рассматро узла к базисному.
Напряжение
на ветвях цепи равно, очевидно, разности
узловых напряжений концов данной ветви.
Например, напряжение ветви 4 равно:
U4=I4R4=U10-U20
Уравнения
по первому закону Кирхгофа для 1 и 2
узлов соответственно записываются:
Узловое
напряжение
Отсюда
Из
приведенных выражений видно:
Собственная
проводим узла
равна сумме проводим ветвей, сход в
данном узле.
Взаимная
проводь равна сумме провод ветвей, соед
данные узлы.
собственная
провод входит в выражения со знаком
«+», а взаимная проводимость – со знаком
«-».
Для
произв схемы, сод n+1
узлов, сист ур по методу узловых напр
имеет вид:
Порядок
расчета электрических цепей по методу
узловых напряжений:
Выбираем
баз узел, где сходится большее кол
ветвей. Если имеется ветвь, сод идеальную
э.д.с., то базисный узел должен быть
концом или началом этой ветви.Составляется
система уравнений для неизвестных
узловых напряжений в соответствии с
общей структурой этих уравнений (36).Решая
данную систему, находят напряжения
узлов относительно базиса.Токи
ветвей определяют по обобщенному
закону Ома:
9.
 Зависимости между сопротивлениями и проводимостями участка цепи.
Зависимости между сопротивлениями и проводимостями участка цепи.
Пользуясь
комплексной формой записи, при заданном
комплексном сопротивлении Z
= R
+ jХ
некоторого участка цепи находим для
того же участка цепи комплексную
проводимость
. (3.15)
В
свою очередь, если задана комплексная
проводимость некоторого участка цепи
Y
= g
– jb,
то комплексное сопротивление того же
участка цепи
(3.16)
Выражения
(3.15) и (3.16) показывают, что реактивное
сопротивление Х и реактивная проводимость
b
одного и того же участка цепи имеют
одинаковый знак.
Кроме
того, каждое слагающее проводимости
(g
и b)
зависит как от активного, так и от
реактивного сопротивлений, т.е. от R
и Х.
Соответственно,
каждое слагающее сопротивлений R
и Х является функцией активной и
реактивной проводимостей g
и b.
Соотношения
g
= l/R
и b
= 1/х справедливы только в частном случае,
когда элемент R,
L
или С рассматривается в отдельности,
например:
1.
 Баланс мощностей в цепях постоянного тока
Баланс мощностей в цепях постоянного тока
Баланс
мощностей является
следствием закона сохранения энергии
— суммарная мощность вырабатываемая
(генерируемая) источниками электрической
энергии равна сумме мощностей потребляемой
в цепи.
Баланс мощностей используют для проверки правильности расчета электрических цепей.
Баланс
мощностей используют для проверки
правильности расчета электрических
цепей.Здесь мы рассмотрим баланс для
цепей постоянного тока.Например. У нас
есть электрическая цепь.Баланс мощностей
в электрической цепи. Согласно закону
Джоуля—Ленца работа, совершаемая
постоянным током в сопротивленииРасчет
электрических цепей постоянного тока.
Резонанс токов.Баланс мощностей – это
выражение закона сохранения энергии,
в электрической цепи.Моделирование
электрических схем с помощью Multisim.
Задачи на трехфазные цепи. Расчет простых
Расчет простых
цепей постоянного тока.Все расчеты в
электрических цепях проверяют балансом
мощностей.Электрическая цепь и ее
основные законы. Электромагнетизм и
электромагнитная индукция. Электрические
машины постоянного тока.Элементами
электрической цепи постоянного тока
являются источники электрической
энергии: источники постоянной ЭДС (рис.
Искомый ток будет равен: E экв =0,017 А. Rэкв
4. БАЛАНС МОЩНОСТЕЙ Уравнение сохранения
баланса в мощностей теории цепей.
являетсяВсе просто, это обычное ТОЭ —
электрические цепи постоянного тока:
Уравнение баланса мощностей является
выражением закона сохранения энергии
в теории цепей.Для линейной электрической
цепи по заданным сопротивлениям и эдс
выполнить следующее: 1)составить
математическую модель заданной цепи
2)Определить токи во всех ветвях цепи
методомдля внешнего контура заданной
электрической цепи.4. Баланс
мощностей.Рассмотрим энергетические
соотношения для электрической цепи,
состоящей, например, из одной машины
постоянного тока с э.д. сПолученные
сПолученные
соотношения для баланса мощностей
применимы не только к цепи для зарядки
аккумуляторов, но и к любым другим
цепям.Определить токи в цепи и проверить
правильность решения через баланс
мощностей.Принцип наложения применительно
к электрическим цепям заключается в
следующем: ток в k – й ветви линейной
электрической цепи равен алгебраической
сумме токов, вызываемыхСоставление
этого уравнения важная задача, позволяющая
проверить правильность расчетов токов
и напряжений в электрической цепи.При
расчете баланса мощностей, источник с
произвольной формой напряжения требуется
заменять источником постоянного
напряжения.
2. Частотные характеристики неразветвлённой цепи r, l, c
Баланс мощностей » решение тоэ
Баланс мощностей для простой неразветвленной цепи
Воздушная линия > Постоянный ток
Баланс мощностей для простой неразветвленной цепи
Рассмотрим энергетические соотношения для электрической цепи, состоящей, например, из одной машины постоянного тока с ЭДС Е1 и внутренним сопротивлением rвт1 и аккумуляторной батареи с ЭДС Е2 и внутренним сопротивлением rвт2 (рис. 1.10). ЭДС машины и аккумуляторной батареи направлены навстречу друг другу. Пусть ЭДС Е1 машины больше ЭДС Е2 аккумуляторной батареи. При этом условии действительное направление тока I совпадает с направлением ЭДС E1. Напряжение U на выводах обоих источников меньше ЭДС E1 на внутреннее падение напряжения rвт1Iв машине и больше ЭДС Е2 на падение напряжения rвт2I в батарее.Действительно, по ( 1.11а)так как . Напряжение , поэтомуПосле умножения обеих частей (1.14) на I и перестановки слагаемых получаемЛевая часть этого уравнения представляет собой мощность, развиваемую машиной; первое слагаемое правой части определяет мощность тепловых потерь (в обмотке машины), а второе слагаемое правой части — мощность, отдаваемую машиной аккумуляторной батарее.Умножив правую и левую части выражения (1.15) на ток I, получим
1.10). ЭДС машины и аккумуляторной батареи направлены навстречу друг другу. Пусть ЭДС Е1 машины больше ЭДС Е2 аккумуляторной батареи. При этом условии действительное направление тока I совпадает с направлением ЭДС E1. Напряжение U на выводах обоих источников меньше ЭДС E1 на внутреннее падение напряжения rвт1Iв машине и больше ЭДС Е2 на падение напряжения rвт2I в батарее.Действительно, по ( 1.11а)так как . Напряжение , поэтомуПосле умножения обеих частей (1.14) на I и перестановки слагаемых получаемЛевая часть этого уравнения представляет собой мощность, развиваемую машиной; первое слагаемое правой части определяет мощность тепловых потерь (в обмотке машины), а второе слагаемое правой части — мощность, отдаваемую машиной аккумуляторной батарее.Умножив правую и левую части выражения (1.15) на ток I, получим
Из этого уравнения непосредственно вытекает, что мощность UI, получаемая аккумуляторной батареей, состоит из мощности тепловых потерь и мощности, необходимой для зарядки аккумуляторов . Полученные соотношения для баланса мощностей применимы не только к цепи зарядки аккумуляторов, но и к любым другим цепям. Отличие состоит лишь в том, что в приемниках другого рода электрическая энергия расходуется не на зарядку аккумуляторов, а на другие процессы, например в электрических двигателях — на механическую работу, в резисторах — только на тепловые потери.
Полученные соотношения для баланса мощностей применимы не только к цепи зарядки аккумуляторов, но и к любым другим цепям. Отличие состоит лишь в том, что в приемниках другого рода электрическая энергия расходуется не на зарядку аккумуляторов, а на другие процессы, например в электрических двигателях — на механическую работу, в резисторах — только на тепловые потери.
Если представить источник энергии другой эквивалентной схемой (рис. 1.11), то окажется, что мощность, развиваемая источником тока, не равна мощности, развиваемой источником ЭДС. Действительно, мощность, развиваемая источником тока, определяется произведением тока J1 и напряжения U на выводах источника тока, т. е. равна J1U. Так как , то после замены тока J1 и простых преобразований получим
Из сравнения выражений (1.18) и (1.16) непосредственно следует, что при одинаковом напряжении на выводах обоих источников и одинаковом токе I тепловые потери при схеме по рис. 1.10 не равны в общем случае тепловым потерям при схеме по рис. 1.11, вследствие чего и мощность, развиваемая источником ЭДС Е1I, не равна мощности, развиваемой источником тока J1U. Это следует иметь в виду при замене реального источника энергии источником ЭДС или источником тока.Пример 1.1.К выводам последовательно соединенных источников энергии (ЭДС E1=12 В и Е2 = 48 В; внутренние сопротивленияrвт1 = 0,4 Ом и rвт2 = 0,6 Ом) подключен приемник — резистор с изменяющимся сопротивлением (рис. 1.12). Определить значение сопротивления r, при котором мощность резистора максимальна. Найти мощность приемника и источников энергии при этом значении сопротивления.Решение. Для определения сопротивления r, при котором мощность резистора максимальна, воспользуемся выражением мощности .Так как токВычислив производную от Р по r и приравняв ее нулю, найдем искомое сопротивлениеЭто соотношение показывает, что мощность приемника максимальна при равенстве суммарного внутреннего сопротивления источников и сопротивления приемника.Значения остальных величин определяются но формулам:токмощности, развиваемые первым и вторым источниками ЭДС,
1.11, вследствие чего и мощность, развиваемая источником ЭДС Е1I, не равна мощности, развиваемой источником тока J1U. Это следует иметь в виду при замене реального источника энергии источником ЭДС или источником тока.Пример 1.1.К выводам последовательно соединенных источников энергии (ЭДС E1=12 В и Е2 = 48 В; внутренние сопротивленияrвт1 = 0,4 Ом и rвт2 = 0,6 Ом) подключен приемник — резистор с изменяющимся сопротивлением (рис. 1.12). Определить значение сопротивления r, при котором мощность резистора максимальна. Найти мощность приемника и источников энергии при этом значении сопротивления.Решение. Для определения сопротивления r, при котором мощность резистора максимальна, воспользуемся выражением мощности .Так как токВычислив производную от Р по r и приравняв ее нулю, найдем искомое сопротивлениеЭто соотношение показывает, что мощность приемника максимальна при равенстве суммарного внутреннего сопротивления источников и сопротивления приемника.Значения остальных величин определяются но формулам:токмощности, развиваемые первым и вторым источниками ЭДС,
мощность приемника
мощность тепловых потерь в обоих источниках
т. е. мощность приемника равна мощности потерь в обоих источниках (так как мощность резистора максимальна при ).
е. мощность приемника равна мощности потерь в обоих источниках (так как мощность резистора максимальна при ).
Смотри ещё по теме Электрические цепи постоянного токаОсновные законы и методы расчета электрических цепей постоянного тока
- Элементы электрических цепей и схем
- Схемы замещения источников энергии
- Закон Ома для участка цепи с ЭДС
- Баланс мощностей для простой неразветвленной цепи
- Законы Кирхгофа и их применение
- Топологические графы
- Законы Кирхгофа в матричной форме
- Метод узловых потенциалов
- Метод контурных токов
- Уравнения цепи в матричной форме
- Расширенные узловые уравнения
- Преобразования в линейных электрических схемах
Основные свойства электрических цепей постоянного тока
- Принцип наложения (суперпозиции)
- Свойство взаимности
- Входные и взаимные проводимости, коэффициенты передачи
- Принцип компенсации. Зависимые источники
- Общие замечания о двухполюсниках и многополюсниках
- Линейные соотношения между напряжениями и токами
- Теорема о взаимных приращениях токов и напряжений
- Принцип эквивалентного генератора
- Передача энергии от активного двухполюсника к пассивному
Уравнение — баланс — мощность
Уравнение баланса мощности составляют для основных режимов работы машины — копание или резание грунта, наполнение ковша, транспорт с грузом и порожняком. Следует учитывать неравномерность нагрузки по мощности, как вследствие изменений встречаемых сопротивлений, так и благодаря периодической работе различных механизмов и систем, питаемых отбором мощности. Для работы двигателя при постоянной мощности желательно, чтобы мощности на различных режимах были одинаковыми. К этому следует стремиться, даже путем изменения некоторых параметров технической характеристики проектируемой машины, например транспортной скорости.
Следует учитывать неравномерность нагрузки по мощности, как вследствие изменений встречаемых сопротивлений, так и благодаря периодической работе различных механизмов и систем, питаемых отбором мощности. Для работы двигателя при постоянной мощности желательно, чтобы мощности на различных режимах были одинаковыми. К этому следует стремиться, даже путем изменения некоторых параметров технической характеристики проектируемой машины, например транспортной скорости.
Уравнение баланса мощности для транзисторных схем рис. 6.13, а, б аналогично (6.15) для лампового триода.
Уравнение баланса мощности ОЭС определяется по (6.1) и (6.2) соответственно для номинальной и произвольной частоты в ОЭС.
Составим уравнение баланса мощностей в несогласованной линии с резонатором, для чего просуммируем мощности, входящие в объем волновода, расположенный между сечениями 1 — 1 и 2 — 2, и приравняем их сумме, состоящей из мощностей, расходящихся от указанного объема, и мощности, поглощенной резонатором.
| Преобразование схемы неразветвленной электрической цепи. |
Получим уравнение баланса мощности для рассматриваемой цепи: сумма мощностей источников электрической энергии равна сумме мощностей приемников.
В уравнении баланса мощностей входят два слагаемых со знаком — , поскольку они относятся к элементам, на которых положительные направления напряжения и тока выбраны встречно. Как видим, наличие зависимых источников не вносит особенностей в составление уравнения баланса мощностей.
| Схема неразветвленной электри ческой цепи. |
Мы получили уравнение баланса мощностей для рассматриваемой цепи: сумма мощностей источников электрической энергии равна сумме мощностей приемников.
Это есть уравнение баланса мощностей в реактивном многополюснике: мощность волны, подведенной к fe — му входу, равна сумме мощности отраженной волны и мощностей волн, поступающих во все остальные линии передачи, подключенные к многополюснику.
Как выглядит уравнение баланса мощностей двигателя.
Для составления уравнения баланса мощностей определим мощности на всех участках цепи.
Для составления уравнения баланса мощностей определим мощности на всех участках цепи.
Исходными зависимостями принимаются уравнение баланса мощности дуги и принцип минимума напряжения.
Эти уравнения называют уравнениями баланса мощностей.
2.3.2. Баланс реактивных мощностей
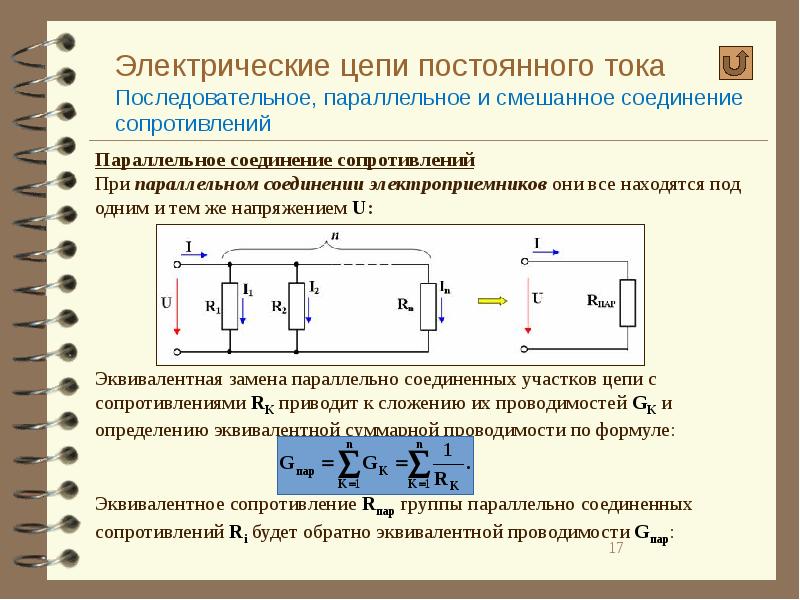
Для нормальной работы электроприемников нужна и активная, и реактивная энергия, причем в любой момент времени суммарная генерируемая реактивная мощность в системе должна быть точно равна потребляемой реактивной мощности. Источниками реактивной мощности в системе являются не только генераторы электростанций, но также воздушные и кабельные ЛЭП, батареи конденсаторов, синхронные компенсаторы, синхронные двигатели, статические компенсирующие установки и др. Таким образом, баланс реактивных мощностей в системе записывается в виде:(32)
Таким образом, баланс реактивных мощностей в системе записывается в виде:(32)
где Qpаб — суммарная реактивная мощность, генерируемая всеми источниками системы (рабочая мощность), Мвар; Qr, Ол, Qk, Qkу — реактивные мощности, генерируемые соответственно генераторами электростанций, линиями электропередач (зарядная мощность), конденсаторными батареями, компенсирующими установками (синхронные компенсаторы, синхронные двигатели, статические компенсирующие установки и т. п.), Мвар;— соответственно суммарная реактивная мощность нагрузок системы, потерь реактивной мощности в системе и расход реактивной мощности на собственные нужды системы, Мвар; Q,10tp — суммарная потребляемая реактивная мощность, Мвар.
Уравнения баланса (28) и (32) включают в себя активную и реактивную мощности, вырабатываемые генераторами электростанций, которые связаны зависимостью(33)
поэтому генерация реактивной мощности электростанциями зависит от числа и мощности работающих генераторов, обеспечивающих покрытие активной нагрузки системы
Принимая во внимание средний коэффициент мощности современных генераторов — 0,8 … 0,9, можно сказать, что располагаемая реактивная мощность генераторов системы составляет 60…70% от их располагаемой активной мощности
Кроме того, потери реактивной мощности достигают 30…35% от выдаваемой в сеть. Это объясняется тем, что индуктивное сопротивление сети значительно выше активного и при передаче электроэнергии имеет место большое число трансформаций (3—4 и более). В результате суммарная потребность в реактивной мощности превышает располагаемую реактивную мощность генераторов системы, т. е. существует дефицит реактивной мощности, достигающий 10 … 15% и более. Дефицит особенно проявляется в летние месяцы, когда па электростанциях часть машин выводится в ремонт.
Это объясняется тем, что индуктивное сопротивление сети значительно выше активного и при передаче электроэнергии имеет место большое число трансформаций (3—4 и более). В результате суммарная потребность в реактивной мощности превышает располагаемую реактивную мощность генераторов системы, т. е. существует дефицит реактивной мощности, достигающий 10 … 15% и более. Дефицит особенно проявляется в летние месяцы, когда па электростанциях часть машин выводится в ремонт.
При дефиците реактивной мощности в системе нарушается баланс (32). Чтобы «свести» баланс реактивных мощностей в системе устанавливают дополнительные источники реактивной мощности. Современные источники реактивной мощности выпускаются на напряжение до 110 кВ и с номинальной мощностью до 450 Мвар (СК — до 320 Мвар, 20 кВ; ТКУ — до 450 Мвар, 110 кВ; БК — до 93 Мвар, 110 кВ).
Нарушение баланса реактивной мощности приводит к отклонениям напряжения, при этом в разных узлах системы отклонения могут быть различными, в отличие от отклонений частоты, которые происходят одновременно во всей системе. Регулирование напряжения осуществляют регулированием реактивной мощности, причем это регулирование в разных точках системы может выполняться независимо. Как правило, это регулирование осуществляется таким образом, чтобы обеспечить минимум потерь мощности в сетях.
Регулирование напряжения осуществляют регулированием реактивной мощности, причем это регулирование в разных точках системы может выполняться независимо. Как правило, это регулирование осуществляется таким образом, чтобы обеспечить минимум потерь мощности в сетях.
Изменение напряжения при нарушении баланса реактийной мощности вызывает изменение потребления нагрузкой системы и активной и реактивной мощности. На рис. 15 приведены характеристики обобщенной нагрузки системы (Uн= 110 кВ, нагрузка преимущественно промышленная),, показывающие, как изменяется потребление активной и реактивной мощностей при отклонениях напряжения. При снижении напряжения уменьшается потребление активной и более резко — реактивной мощностей, причем при снижении напряжения до 0,8UH и ниже потребление реактивной мощности начинает возрастать, возрастают потери напряжения в сети и возникает процесс лавинного снижения напряжения, лавина напряжения — это тяжелый аварийный режим, который предотвращается с помощью специальных мер (форсировкой возбуждения генераторов, синхронных двигателей и др. ).
).
Рис. 15
При общем снижении напряжения в системе его восстановление возможно только при наличии достаточного резерва реактивной мощности системы. При местном снижении напряжения его регулирование осуществляют с помощью местных источников реактивной мощности, устанавливаемых на приемных подстанциях или на передающих концах питающих линий. Вопросы регулирования напряжения и реактивной мощности рассмотрены ранее (см. 1.4; 1.5; 1.6).
Баланс мощностей
Воздушная линия > Цепи переменного тока. Теория.
Баланс мощностейИз закона сохранения энергии следует, что в любой цепи соблюдается баланс как мгновенных, так и активных мощностей. Сумма всех отдаваемых (мгновенных и активных) мощностей равна сумме всех получаемых (соответственно мгновенных или активных) мощностей. Покажем, что соблюдается баланс и для комплексных, и, следовательно, для реактивных мощностей.Пусть общее число узлов схемы равно n. Здесь будем под узлом понимать и место соединения любых двух элементов схемы (источников и приемников), а под ветвью — каждый участок схемы, содержащий один из ее элементов. Напишем для каждого из и узлов уравнения по первому закону Кирхгофа для комплексов, сопряженных с комплексными токами:Эти уравнения записаны в общейформе в предположении, что каждыйузел связан со всеми остальными n-1 узлами. При отсутствии тех или иныхветвей соответствующие слагаемые вуравнениях выпадают. При наличиимежду какой-либо парой узлов нескольких ветвей число слагаемых соответственноувеличивается. Так, например,если между узлами 1 и 2 включены двеветви, то вместо в уравнениявойдут суммы .Умножим каждое из уравнений на комплексный потенциал узла, для которого составлено уравнение, и затем все уравнения просуммируем. Учтем, что комплексы, сопряженные с комплексными токами, входят в эти уравнения дважды (для двух различных направлений), причем и т. д. В результате получимт. е. сумма комплексных получаемых мощностей во всех ветвях цепи равна нулю. Здесь все слагаемые представляют комплексные получаемые мощности, потому что они вычисляются для одинаковых положительных направлений напряжений (разностей потенциалов) и токов.
Напишем для каждого из и узлов уравнения по первому закону Кирхгофа для комплексов, сопряженных с комплексными токами:Эти уравнения записаны в общейформе в предположении, что каждыйузел связан со всеми остальными n-1 узлами. При отсутствии тех или иныхветвей соответствующие слагаемые вуравнениях выпадают. При наличиимежду какой-либо парой узлов нескольких ветвей число слагаемых соответственноувеличивается. Так, например,если между узлами 1 и 2 включены двеветви, то вместо в уравнениявойдут суммы .Умножим каждое из уравнений на комплексный потенциал узла, для которого составлено уравнение, и затем все уравнения просуммируем. Учтем, что комплексы, сопряженные с комплексными токами, входят в эти уравнения дважды (для двух различных направлений), причем и т. д. В результате получимт. е. сумма комплексных получаемых мощностей во всех ветвях цепи равна нулю. Здесь все слагаемые представляют комплексные получаемые мощности, потому что они вычисляются для одинаковых положительных направлений напряжений (разностей потенциалов) и токов. Полученное равенство выражает баланс комплексных мощностей. Из него следует равенство нулю в отдельности суммы получаемых активных мощностей и суммы получаемых реактивных мощностей. Так как отрицательные получаемые мощности представляют собой мощности отдаваемые, то можно утверждать, что суммы всех отдаваемых и всех получаемых реактивных мощностей равны друг другу.Аналогичную формулировку можно придать и балансу комплексных мощностей. Перенеся часть слагаемых в правую часть уравнения с противоположным знаком, т. е. рассматривая их как мощности отдаваемые, убедимся в равенстве сумм комплексных получаемых .и отдаваемых мощностей:При равенстве сумм комплексных величин суммы их модулей в общем случае не равны друг другу. Отсюда следует, что для полных мощностей S баланс не соблюдается.Получаемая пассивным двухполюсником реактивная мощность должна равняться сумме реактивных мощностей, получаемых индуктивными и емкостными элементами, которые составляют его схему:Пользуясь соотношениями ( 3.47) и ( 3.
Полученное равенство выражает баланс комплексных мощностей. Из него следует равенство нулю в отдельности суммы получаемых активных мощностей и суммы получаемых реактивных мощностей. Так как отрицательные получаемые мощности представляют собой мощности отдаваемые, то можно утверждать, что суммы всех отдаваемых и всех получаемых реактивных мощностей равны друг другу.Аналогичную формулировку можно придать и балансу комплексных мощностей. Перенеся часть слагаемых в правую часть уравнения с противоположным знаком, т. е. рассматривая их как мощности отдаваемые, убедимся в равенстве сумм комплексных получаемых .и отдаваемых мощностей:При равенстве сумм комплексных величин суммы их модулей в общем случае не равны друг другу. Отсюда следует, что для полных мощностей S баланс не соблюдается.Получаемая пассивным двухполюсником реактивная мощность должна равняться сумме реактивных мощностей, получаемых индуктивными и емкостными элементами, которые составляют его схему:Пользуясь соотношениями ( 3.47) и ( 3. 48), получаемЧасто вместо (3.48) принимают для реактивной мощности емкостного элементапри этомно формула (3.49) не изменяется.Заметим, что положения этого параграфа могут быть распространены и на цепи, между элементами которых имеются взаимные индуктивности, так как подобные цепи, как будет показано, можно свести путем преобразования к схемам, не содержащим взаимных индуктивностей.
48), получаемЧасто вместо (3.48) принимают для реактивной мощности емкостного элементапри этомно формула (3.49) не изменяется.Заметим, что положения этого параграфа могут быть распространены и на цепи, между элементами которых имеются взаимные индуктивности, так как подобные цепи, как будет показано, можно свести путем преобразования к схемам, не содержащим взаимных индуктивностей.
Смотри еще по разделу на websor
- Переменные токи
- Понятие о генераторах переменного тока
- Синусоидальный ток
- Действующие ток, ЭДС и напряжение
- Изображение синусоидальных функций времени векторами и комплексными числами
- Сложение синусоидальных функций времени
- Электрическая цепь и ее схема
- Ток и напряжения при последовательном соединении резистивного, индуктивного и емкостного элементов
- Сопротивления
- Разность фаз напряжения и тока
- Напряжение и токи при параллельном соединении резистивного, индуктивного и емкостного элементов
- Проводимости
- Пассивный двухполюсник
- Мощности
- Мощности резистивного, индуктивного и емкостного элементов
- Баланс мощностей
- Знаки мощностей и направление передачи энергии
- Определение параметров пассивного двухполюсника при помощи амперметра, вольтметра и ваттметра
- Условия передачи максимальной мощности от источника энергии к приемнику
- Понятие о поверхностном эффекте и эффекте близости
- Параметры и эквивалентные схемы конденсаторов
- Параметры и эквивалентные схемы катушек индуктивности и резисторов
Оцените статью:
Баланс мощностей электрической цепи
Содержание:
- Баланс мощностей
- Пример расчёта разветвлённой цепи постоянного тока
- Баланс мощностей
Баланс мощностей
Для любой электрической цепи суммарная мощность , развиваемая источниками электрической энергии (источниками тока и ЭДС), равна суммарной мощности , расходуемой потребителями (резисторами):
Мощность, рассеиваемая резистором, , мощность источника ЭДС , мощность источника тока .
Мощности, рассеиваемые резисторами, всегда положительные, в то время как мощности источников электрической энергии, в зависимости от соотношения направления падений напряжения и тока в них, могут иметь любой знак. Мощность положительна, когда направление тока через источник тока противоположно падению напряжения на нем. Он питает электрическую цепь. В противном случае источник питания является отрицательным, и вы являетесь потребителем электрической энергии. Следует заметить, что направление падения напряжения всегда противоположно направлению ЭДС, поэтому для источника ЭДС условием положительной мощности является совпадение направлений ЭДС и тока.
По этой ссылке вы найдёте полный курс лекций по теоретическим основам электротехники (ТОЭ):
Пример расчёта разветвлённой цепи постоянного тока
Рассмотрим решение задачи для цепи, представленной на рис. 1.6, описанными выше методами расчёта.
Дано
Найти:
1) все неизвестные токи, используя законы Кирхгофа; показать, что баланс мощностей имеет место;
Решение.
1) Применение законов Кирхгофа. Баланс мощностей.
Всего в схеме семь ветвей =7, ветвей с источниками тока = 1, число неизвестных токов равно , количество узлов — , число уравнений по первому закону Кирхгофа , число уравнений по второму закону Кирхгофа —
Возможно вам будут полезны данные страницы:
Выберем положительные направления токов и обозначим их стрелками. Выберем и обозначим стрелками направления обхода трёх независимых контуров: Составим систему уравнений по законам Кирхгофа
для узла а ;
для узла b
для узла с или ;
для контура ,
для контура
для контура
Полученные уравнения после подстановки в них числовых значений будут иметь следующий вид:
Решение данной системы:
Баланс мощностей для рассматриваемой цепи
Получено тождество 252 Вт = 252 Вт.
Примечание: падение напряжения на источнике тока определено по второму закону Кирхгофа для контура, содержащего и , как
Что такое теоретические основы электротехники (ТОЭ) вы узнаете по этой ссылке:
Баланс мощностей
В любой электрической цепи должен соблюдаться энергетический баланс -баланс мощностей: алгебраическая сумма мощностей всех источников равна арифметической сумме мощностей всех приемников энергии.
В левой части равенства слагаемое берется со знаком «+» если Е и I совпадают по направлению и со знаком если не совпадают.
Если направления ЭДС и тока I в источнике противоположны, то физически это означает, что данный источник работает в режиме потребителя.
Баланс мощностей с источником тока
При решений электротехнических задач, часто нужно проверить правильность найденных значений. Для этого в науке ТОЭ, существует так называемый баланс мощностей.
Баланс мощностей – это выражение закона сохранения энергии, в электрической цепи. Определение баланса мощностей звучит так: сумма мощностей потребляемых приемниками, равна сумме мощностей отдаваемых источниками. То есть если источник ЭДС в цепи отдает 100 Вт, то приемники в этой цепи потребляют ровно такую же мощность.
Или
Проверим это соотношение на простом примере.
Для начала свернем схему и найдем эквивалентное сопротивление. R2 и R3 соединены параллельно.
R2 и R3 соединены параллельно.
Найдем по закону Ома ток источника и напряжение на R23, учитывая, что r1 и R23 соединены последовательно, следовательно, сила тока одинаковая.
Теперь проверим правильность с помощью баланса мощностей.
Небольшое различие в значениях связано с округлениями в ходе расчета.
С помощью баланса мощностей, можно проверить не только простую цепь, но и сложную. Давайте проверим сложную цепь из статьи метод контурных токов.
Как видите независимо от сложности цепи, баланс сошелся, и должен сойтись в любой цепи!
Баланс мощностей в электрической цепи означает, что мощность, которую выделяют все источники энергии, равна мощности, которую потребляют в этой же цепи все приемники энергии:
, (2.69)
где – мощность i-го источника ЭДС или тока, Вт; – мощность, выделяемая в j-м сопротивлении, Вт.
Очевидно, что баланс мощностей следует из закона сохранения энергии.
Запишем для анализируемой цепи рис. 2.15 сумму мощностей, выделяемых всеми источниками энергии. При этом мощности, выделяемые источниками ЭДС и тока, будем считать положительными, если ток в ветви, где установлен источник ЭДС или тока, совпадает с направлением тока внутри источника (со стрелкой в обозначении источника ЭДС или тока), и отрицательными, если направление тока в ветви противоположно направлению тока в источнике. Тогда, составив соответствующее уравнение для вычисления суммарной мощности, отдаваемой источниками ЭДС и тока в анализируемую цепь и подставив в него численные значения, получим суммарную мощность источников:
[Вт]. (2.70)
при этом токи ветвей должны подставляться в уравнение (2.70) со своим знаком, который получился при их расчете.
Суммарная мощность, рассеиваемая в цепи сопротивлениями (приемниками энергии), для той же цепи рис. 2.15, может быть найдена так:
[Вт]. (2.71)
В результате расчета (2.70) – выделяемая источниками мощность, и (2. 71) – потребляемая сопротивлениями мощность в цепи – должны быть одинаковы.
71) – потребляемая сопротивлениями мощность в цепи – должны быть одинаковы.
Потенциальная диаграмма электрической цепи
Постоянного тока
Потенциальная диаграмма контура электрической цепи постоянного тока – это графическое изображение второго закона Кирхгофа, в котором вместо падений напряжений записаны потенциалы узлов электрической цепи. Она показывает суммарное значение потенциала и суммарное сопротивление в данной точке цепи того контура, для которого построена диаграмма, считая от опорного узла, потенциал которого принят за нулевой. Иными словами, потенциальная диаграмма показывает распределение потенциалов и сопротивлений в том контуре цепи, для которого она построена.
Графически эта диаграмма представляет собой ломаную линию, изображенную в декартовой системе координат, горизонтальной осью которой (осью абсцисс) является ось сопротивлений , а вертикальной осью (осью ординат) – ось потенциалов .
Процесс построения потенциальной диаграммы электрической цепи рассмотрим для той же, что и ранее, электрической цепи, показанной на рис. 2.3, и модифицированной для удобства построения потенциальной диаграммы так, как показано на рис. 2.15.
2.3, и модифицированной для удобства построения потенциальной диаграммы так, как показано на рис. 2.15.
Поскольку для построения потенциальной диаграммы требуется знание численных значений токов ветвей и сопротивлений ветвей, приведем эти численные значения для цепи рис. 2.15 при условии, что исходные данные для расчета этой цепи таковы: Ом, Ом, Ом, Ом, Ом, Ом; величины источников ЭДС: В, В; величины источников тока: А, А. Значения токов в ветвях цепи, рассчитанные прямым применением законов Кирхгофа (сам расчет здесь не приводится), таковы: [А]; [А]; [А]; [А]; [А]; [А].
Построение потенциальной диаграммы начнем с выбора контура, для которого эта диаграмма будет составляться. На наш взгляд, наиболее информативно будет построить потенциальную диаграмму для контура d-b-m-a-c-s-d, так как в этом контуре содержатся все источники ЭДС и источники тока анализируемой цепи и при таком обходе на потенциальной диаграмме будут показаны потенциалы всех узлов анализируемой схемы. Далее произведем выбор опорного узла, потенциал которого примем за ноль. Есть смысл взять за опорный узел d, как и ранее при расчетах анализируемой цепи. Потенциал этого узла положим равным нулю, как и ранее (2.44).
Далее произведем выбор опорного узла, потенциал которого примем за ноль. Есть смысл взять за опорный узел d, как и ранее при расчетах анализируемой цепи. Потенциал этого узла положим равным нулю, как и ранее (2.44).
Определим численные значения потенциалов узлов и точек анализируемой схемы, находящихся на пути обхода выбранного нами контура d-b-m-a-c-s-d. Поскольку потенциал узла d равен нулю (2.44), то потенциал узла b определится так:
[В]. (2.72)
Знак «плюс» при произведении означает, что потенциал узла b повышается при переходе от узла d анализируемой схемы к узлу b (см. полярность падения напряжения на сопротивлении от тока на схеме рис. 2.15).
Следующим определим потенциал точки m анализируемой схемы:
[В]. (2.73)
Знаки при произведениях и соответствуют полярностям, показанным на схеме рис. 2.15.
Следующим за точкой m анализируемой схемы идет узел a. Его потенциал равен:
[В]. (2.74)
(2.74)
Рис. 2.15. Эквивалентная схема анализируемой электрической цепи для построения потенциальной диаграммы
Далее определим потенциал узла c, значение которого составит:
[В]. (2.75)
Потенциал точки s, следующей за узлом c по выбранному нами обходу, равен:
[В]. (2.76)
Обойдя таким образом весь контур d-b-m-a-c-s-d, мы возвращаемся в узел d. При этом потенциал узла d должен стать равным нулю. В самом деле, так оно и происходит, так как при подходе из узла c к узлу d, потенциал последнего станет равен:
[В]. (2.77)
После расчета численных значений потенциалов для контура d-b-m-a-c-s-d можно построить саму потенциальную диаграмму. Эта диаграмма показана на рис. 2.16.
Техника построения потенциальной диаграммы такова. На осях декартовой системы координат откладывают значения потенциалов и сопротивлений для контура цепи (схемы), который был ранее выбран для построения потенциальной диаграммы. В нашем примере, рис. 2.15, это контур d-b-m-a-c-s-d. Значения заранее рассчитанных величин потенциалов для каждой из точек этого контура откладывают на вертикальной оси (оси ординат) в положительную или отрицательную область значений, в зависимости от знака потенциала, полученного ранее при расчете. В нашем примере это будут потенциалы , , , , , и вновь точек d-b-m-a-c-s-d, соответственно. Порядок следования значений потенциалов в потенциальной диаграмме соответствует их порядку при расчете значений потенциалов. В анализируемой нами цепи рис. 2.15, этот порядок , , , , , , соответствует обходу контура d-b-m-a-c-s-d. Значения сопротивлений откладываются по горизонтальной оси (оси абсцисс) декартовой системы координат. За нулевое (исходное) значение сопротивления в потенциальной диаграмме принимается значение в опорном узле; в нашем примере рис. 2.15 это значение сопротивления в узле d. Далее, по мере обхода контура цепи, который выбран для построения потенциальной диаграммы (в нашем примере это контур d-b-m-a-c-s-d), значения сопротивлений в каждой последующей точке прибавляются к значениям сопротивлений в предыдущей точке.
В нашем примере, рис. 2.15, это контур d-b-m-a-c-s-d. Значения заранее рассчитанных величин потенциалов для каждой из точек этого контура откладывают на вертикальной оси (оси ординат) в положительную или отрицательную область значений, в зависимости от знака потенциала, полученного ранее при расчете. В нашем примере это будут потенциалы , , , , , и вновь точек d-b-m-a-c-s-d, соответственно. Порядок следования значений потенциалов в потенциальной диаграмме соответствует их порядку при расчете значений потенциалов. В анализируемой нами цепи рис. 2.15, этот порядок , , , , , , соответствует обходу контура d-b-m-a-c-s-d. Значения сопротивлений откладываются по горизонтальной оси (оси абсцисс) декартовой системы координат. За нулевое (исходное) значение сопротивления в потенциальной диаграмме принимается значение в опорном узле; в нашем примере рис. 2.15 это значение сопротивления в узле d. Далее, по мере обхода контура цепи, который выбран для построения потенциальной диаграммы (в нашем примере это контур d-b-m-a-c-s-d), значения сопротивлений в каждой последующей точке прибавляются к значениям сопротивлений в предыдущей точке.
Таким образом, сопротивление в каждой точке потенциальной диаграммы контура оказывается суммарным для этой точки, начиная с опорного узла, где значение сопротивления принято за ноль. Если при переходе из одной точки контура в другую сопротивления в схеме цепи нет, то к предыдущему значению сопротивления прибавляется ноль (это имеет место при прохождении источника ЭДС с нулевым внутренним сопротивлением).
Рис. 2.8.2 Потенциальная диаграмма контура d-b-m-a-c-s-d исследуемой цепи
В нашем примере значения сопротивлений в точках потенциальной диаграммы контура d-b-m-a-c-s-d составят:
[Ом]. (2.78)
Таким образом, при построении потенциальной диаграммы контура электрической цепи по вертикальной оси декартовой системы координат откладывают потенциалы узлов по мере их упоминания при обходе контура, а по горизонтальной оси – нарастающим итогом сопротивления также по мере их упоминания при таком обходе. Используют потенциальную диаграмму цепи для наглядного визуального представления распределения потенциалов и соответствующих им сопротивлений по тому или иному контуру электрической цепи.
Библиографический список
1. Основы теории цепей. Методические указания и контрольные задания для студентов радиотехнического факультета спец. 0701 “Радиотехника”.-Сост. Ю.А.Мантейфельд, А.Д.Суслов. М.: МИРЭА.-1980.-48 с.
2. Основы теории цепей. Методические указания по выполнению расчетно-графических заданий №1-2 для студентов радиотехнического факультета. Сост. В.И.Вепринцев. Красноярск: Изд-во КГТУ, 2000. 64 с.
3. Шебес, М.Р., Каблукова, М.В. Задачник по теории линейных электрических цепей: Учеб. пособ. для электротехнич., радиотехнич. Спец. вузов.-4-е изд. перераб. и доп.-М.: Высш. шк., 1990.-544 с.: ил.
4. Основы теории цепей: учебник для вузов / Г.В.Зевеке, П.А.Ионкин, А.В.Нетушил, С.В.Страхов. – 5-е изд., перераб. – М.: Энергоатомиздат, 1989. – 528 с.
5. Теория линейных электрических цепей: учебник для вузов / Б.П.Афанасьев, О.Е.Гольдин, И.Г.Кляцкин, Г.Я.Пинес. – М.: Высш. шк., 1973. – 592 с.
Оглавление
1. ЗАДАНИЕ И ВЫБОР ВАРИАНТА ДЛЯ ЕГО ВЫПОЛНЕНИЯ.. 4
ЗАДАНИЕ И ВЫБОР ВАРИАНТА ДЛЯ ЕГО ВЫПОЛНЕНИЯ.. 4
2. РАСЧЕТ ВЕЛИЧИН ТОКОВ НЕПОСРЕДСТВЕННЫМ ПРИМЕНЕНИЕМ ЗАКОНОВ КИРХГОФА, МЕТОДАМИ КОНТУРНЫХ ТОКОВ, УЗЛОВЫХ ПОТЕНЦИАЛОВ И МЕТОДОМ ЭКВИВАЛЕНТНОГО ГЕНЕРАТОРА.. 9
2.2. Анализ (расчет) сложных электрических цепей. 19
методом контурных токов. 19
2.6.3 Анализ (расчет) сложных электрических цепей. 25
методом узловых потенциалов. 25
2.6.4 Анализ (расчет) сложных электрических цепей. 31
методом эквивалентного генератора. 31
2.5. Баланс мощностей в электрической цепи постоянного тока. 40
2.6 Потенциальная диаграмма электрической цепи. 41
постоянного тока. 41
Библиографический список. 47
Дата добавления: 2018-02-15 ; просмотров: 2258 ; ЗАКАЗАТЬ РАБОТУ
Баланс мощностей является следствием закона сохранения энергии — суммарная мощность вырабатываемая (генерируемая) источниками электрической энергии равна сумме мощностей потребляемой в цепи.
Источники E1 и E2 вырабатывают электрическую энергию, т. к. направление ЭДС и тока в ветвях с источниками совпадают (если ЭДС и ток в ветвях направлены в противоположную сторону, то источник ЭДС потребляет энергию и его записывают со знаком минус). Баланс мощностей для заданной цепи запишется так:
к. направление ЭДС и тока в ветвях с источниками совпадают (если ЭДС и ток в ветвях направлены в противоположную сторону, то источник ЭДС потребляет энергию и его записывают со знаком минус). Баланс мощностей для заданной цепи запишется так:
С учетом погрешности расчетов баланс мощностей получился.
Похожие статьи:
7 thoughts on “Баланс мощностей в цепи постоянного тока”
Блин все ошибки найдут, в условии должно быть Е1 = 20, Е2 = 30.
P.S. Сейчас исправлю, спасибо за внимательность
Какова допустимая погрешность?? У меня выходит 0,561
По идее баланс мощности должен равняться нулю, но так как мы округляем некоторые значения при расчете — возникает погрешность, которая может составлять примерно 0,1 — 5% от потребляемой мощности.
Про знаки ЭДС сказано про знаки мощностей приёмников — нет.
Баланс мощностей.
Образование Баланс мощностей.

Количество просмотров публикации Баланс мощностей. — 721
| Наименование параметра | Значение |
| Тема статьи: | Баланс мощностей. |
| Рубрика (тематическая категория) | Образование |
Баланс основывается на законе сохранения энергии.
Количество тепла, выделяющееся в единицу времени в сопротивлениях схемы, равняется энергии, доставляемой за то же время источниками питания.
В случае если направление тока I, протекающего через источник E совпадает с направлением Э.Д.С., то произведение E*I входит в уравнение энергетического баланса с положительным знаком. В случае если же направление тока в ветви встречно Э.Д.С., то и произведение E*I берется с отрицательным знаком.
Уравнение энергетического баланса (или баланса мощностей).
Основной проверкой рассчитанных токов является баланс мощностей.
С учетом погрешностей расчета допускается небаланс не более 5 %.
Вопросы для самоконтроля
· Баланс мощностей
· Закон сохранения энергий
· потенциальная диаграмма
· масштаб по сопротивлению
· масштаб по напряжению
· в каких осях строится потенциальная диаграмма
Лекция №8
Баланс мощностей. — понятие и виды. Классификация и особенности категории «Баланс мощностей.» 2017, 2018.
Читайте также
Пусть имеем схему по рис. 4, где А – некоторый активный четырехполюсник. Для данной цепи можно записать
;
.
Обозначим токи и как: ; .
Тогда для комплексов полных мощностей первой и второй ветвей соответственно можно записать:
;
.
Рассмотрим в этих уравнениях члены со… [читать подробнее].
Баланс мощностей является следствием закона сохранения энергии и может служить критерием правильности расчета электрической цепи.
а) Постоянный ток
Для любой цепи постоянного тока выполняется соотношение:
(14)
Это уравнение представляет собой математическую… [читать подробнее].
Для схемы на рис. 6.19 запишем уравнение по второму закону Кирхгофа. Умножим левую и правую части уравнения на сопряженный комплекс тока
где — результирующее реактивное сопротивление; I2- квадрат модуля тока.
где — полная комплексная, активная и реактивная мощности… [читать подробнее].
В качестве комплексной мощности понимают произведение комплексного напряжения на сопряженную комплексную величину тока. В результате чего, получаем комплексную мощность:
.
Вещественная часть комплексной мощности равна активной мощности Р, а мнимая часть Q (без j)… [читать подробнее].
Под комплексной мощностью понимается величина, определяемая по формуле
(4.17)
где — комплексное действующее значение напряжения;
— сопряженный комплексный ток.
Вещественная часть комплексной мощности равна активной мощности (измеряется в Вт), мнимая часть -… [читать подробнее].
Вытекает из закона сохранения энергии. Условие энергетического баланса для любой электрической цепи постоянного тока выражается в виде равенства нулю суммы мощностей по всем элементам:
, где п — число элементов схемы.
Уравнение баланса мощностей можно записать в иной… [читать подробнее].
Вытекает из закона сохранения энергии. Условие энергетического баланса для любой электрической цепи постоянного тока выражается в виде равенства нулю суммы мощностей по всем элементам:
, где п — число элементов схемы.
Уравнение баланса мощностей можно записать в иной… [читать подробнее].
Поскольку в ВЧ генераторе происходят процессы преобразования энергии разных источников, то важно составить баланс мощностей для выходной и входной цепей всего устройства.
В выходной цепи происходит преобразование энергии источника постоянного тока мощностью в… [читать подробнее].
Предисловие.
Классификация и состав затрат, связанных с организационной деятельностью
Классификация затрат в управленческом учете
Экономически обоснованная классификация производственных затрат является основой организации учета… [читать подробнее].
Работа источника электрического тока определяется по формуле:
Работа электрического тока протекающего через сопротивление Rвн –
Работа и энергия – понятия равноценные. Энергия – способность источника совершать работу. Чтобы измерить энергию источника, надо… [читать подробнее].
Энергия – способность источника совершать работу. Чтобы измерить энергию источника, надо… [читать подробнее].
Управление балансом мощности в преобразователе переменного / постоянного / переменного тока для рекуперативного торможения в двухуровневом приводе с маховиком
Использование маховика в качестве механизма управления мощностью может увеличить емкость накопителя энергии и снизить количество зарядов аккумулятора / циклы разряда. Кроме того, способность восстанавливать энергию транспортного средства во время торможения может повысить эффективность системы. В исследуемой здесь полностью электрической трансмиссии на основе маховика есть новинка, заключающаяся в использовании двухобмоточного двигателя / генератора с маховиком, который делит систему на два разных уровня напряжения, повышая эффективность электрической трансмиссии.Соединение двух электрических машин переменного тока (т. Е. Маховика и колесного двигателя) с разной и переменной рабочей частотой является сложной задачей. Реализовано управление согласованием мощности, применяемое к преобразователю AC / DC / AC. Преобразователь AC / DC / AC регенерирует электроэнергию, преобразованную во время торможения в маховик, используемый здесь как устройство управления мощностью. Контролируя баланс мощности, одно и то же оборудование может использоваться для ускорения и торможения, обеспечивая снижение гармоник и надежную реакцию.Моделирование всей системы в режиме торможения было выполнено как в Matlab, так и в Simulink, и их результаты были сопоставлены. Функциональные возможности предложенного элемента управления были показаны и обсуждены, при этом достигнута полная регенерация. Достигнута эффективность двустороннего движения (от колеса к колесу) более 80%.
Реализовано управление согласованием мощности, применяемое к преобразователю AC / DC / AC. Преобразователь AC / DC / AC регенерирует электроэнергию, преобразованную во время торможения в маховик, используемый здесь как устройство управления мощностью. Контролируя баланс мощности, одно и то же оборудование может использоваться для ускорения и торможения, обеспечивая снижение гармоник и надежную реакцию.Моделирование всей системы в режиме торможения было выполнено как в Matlab, так и в Simulink, и их результаты были сопоставлены. Функциональные возможности предложенного элемента управления были показаны и обсуждены, при этом достигнута полная регенерация. Достигнута эффективность двустороннего движения (от колеса к колесу) более 80%.
1. Введение
В автомобильной промышленности наблюдается четкая тенденция к использованию большего количества электрических систем для удовлетворения постоянно растущих требований к автомобильной нагрузке.Ожидается, что в ближайшие 10–20 лет автомобильные электроэнергетические системы претерпят коренные изменения [1].
В электромобилях, описанных в литературе, мощность передается от колес непосредственно к основному накопителю энергии (например, батареям) во время рекуперативного торможения [2]. Традиционно аккумулятор напрямую подключается к колесному двигателю [3]. Однако комбинация первичного источника энергии, например батарей, и буфера мощности может использоваться для удовлетворения пиковых требований к энергии / мощности электромобиля.Системы тяги электромобилей, которые сочетают в себе суперконденсатор или буфер пиковой мощности маховика с источником энергии батареи, также называются двойными источниками питания.
Комбинация аккумулятор-суперконденсатор для автомобильного применения описана в литературе [4–7]. Результаты показывают, что суперконденсаторы обладают высокой внутренней эффективностью и могут заряжаться и разряжаться большое количество раз без ухудшения рабочих характеристик. Однако стоимость суперконденсатора в кВт / ч оценивается в пределах 10000–20000 ∖ $ / кВтч. С другой стороны, маховики имеют стоимость киловатт-часа, оцениваемую в пределах 500–1000 $ $ / кВтч [8, 9]. Кроме того, маховики обеспечивают стабильное напряжение и уровень мощности независимо от нагрузки, температуры или уровня заряда; не включены химические вещества, что не связано с загрязнением окружающей среды, а эффективность и жизненные циклы аналогичны тем, которые представлены для суперконденсаторов [10, 11].
С другой стороны, маховики имеют стоимость киловатт-часа, оцениваемую в пределах 500–1000 $ $ / кВтч [8, 9]. Кроме того, маховики обеспечивают стабильное напряжение и уровень мощности независимо от нагрузки, температуры или уровня заряда; не включены химические вещества, что не связано с загрязнением окружающей среды, а эффективность и жизненные циклы аналогичны тем, которые представлены для суперконденсаторов [10, 11].
Рекуперативное торможение позволяет восстанавливать энергию при снижении скорости автомобиля. Затем кинетическая энергия преобразуется и накапливается, уменьшая рассеяние мощности в тепло и частицы, которые опасны для окружающей среды и здоровья [12], как в обычных тормозах.При движении по городу от одной трети до половины потребляемой энергии теряется при торможении [13]. Однако сегодня практический предел восстановления кинетической энергии в электромобилях низкий, около 40%, в зависимости от множества факторов, таких как степень заряда аккумулятора или количество колес, оборудованных для использования системы рекуперативного торможения [14].
Если используется буфер мощности, он может справиться со всеми большими колебаниями мощности от колес вместо передачи их на аккумулятор. Следовательно, это может повысить общую эффективность рекуперативного торможения [15].Опубликованные результаты продемонстрировали эффективность двустороннего обхода около 60% для систем батарея-суперконденсатор [6, 16], что является сложной стратегией управления, необходимой для регенерации, поскольку необходимо постоянно контролировать начальные условия суперконденсатора.
Обсуждаемая здесь система соединяет колесный двигатель с промежуточным маховиковым двигателем / генератором, который работает как силовое управляющее устройство. Таким образом, во время рекуперативного торможения вся мощность поглощается маховиком, а аккумулятор вообще не заряжается.
Настоящая статья фокусируется на эффективном рекуперации энергии торможения с целью повышения эффективности системы, особенно при движении с остановками в городских условиях. Стратегия управления была разработана таким образом, чтобы поглощать мощность, вырабатываемую колесами во время торможения с помощью маховика. Поток мощности во время цикла движения, когда скорость транспортного средства уменьшается, был вычислен и использован в полном моделировании системы в Simulink. Параметры моделирования были выбраны в соответствии с нашей экспериментальной установкой, которая уже была испытана в тяговом режиме [17].
Поток мощности во время цикла движения, когда скорость транспортного средства уменьшается, был вычислен и использован в полном моделировании системы в Simulink. Параметры моделирования были выбраны в соответствии с нашей экспериментальной установкой, которая уже была испытана в тяговом режиме [17].
Содержание статьи следующее: Раздел 2 представляет описание исследуемой системы. В разделе 3 представлена схема управления и критерии проектирования преобразователя AC / DC / AC. Преобразователь разделен на выпрямитель и инвертор для упрощения его анализа. В разделе 4 показаны результаты моделирования как для моделей Matlab, так и для Simulink.
2. Общее описание системы
Система маховика физически разделена на два уровня напряжения через обмотки статора маховика машины.Каждая сторона соединяет маховик машины с другим компонентом системы (например, аккумулятором или колесным двигателем). Подключение осуществляется через преобразователи мощности, которые преобразуют входной / выходной сигнал в форму и частоту, необходимые для подключения системы.
Таким образом, батареи могут быть оптимизированы с точки зрения удельной энергии. Пики мощности передаются / поглощаются маховиком во время разгона / торможения. Аккумулятор не подвергается частым циклам зарядки / разрядки. Все преимущества увеличивают срок службы батареи, уменьшают размер аккумуляторной батареи и увеличивают ее возможности хранения энергии [18].Схематическое изображение предлагаемой системы маховика показано на рисунке 1.
Машина с двумя уровнями напряжения может работать одновременно как двигатель и генератор между двумя силовыми шинами с разной мощностью [19]. Коэффициент трансформации определяет противо-ЭДС сторон напряжения.
Преобразователь AC / DC / AC соединяет двигатель колеса с высоковольтной (ВН) обмоткой маховика, как показано на Рисунке 1. Когда автомобиль находится в режиме тяги, мощность перетекает от аккумулятора к колесам.Аккумулятор обеспечивает плавную подачу энергии, в то время как маховик обеспечивает пиковые значения мощности, необходимые во время цикла движения. В режиме торможения мощность передается от колес к маховику машины.
В режиме торможения мощность передается от колес к маховику машины.
В литературе мало сообщений о соединении и управлении двумя трехфазными машинами переменного тока с различной и регулируемой скоростью работы. Сообщалось о статическом трехфазном преобразователе мощности для привода переменного тока в электросети [20, 21]. Хотя здесь асинхронная машина управляется с переменной скоростью, линия электроснабжения соответствует бесконечной шине с постоянной частотой и напряжением.Применение с низким энергопотреблением от однофазного до трехфазного переменного / постоянного / переменного тока описано в [22]. Трехфазные инверторы постоянного / переменного тока, используемые в тяговом движении (локомотив), питаются от сети (пантограф) либо постоянного, либо однофазного переменного тока, как описано в [23]. В случае питания переменного тока (однофазная) сеть подключается к трехфазному инвертору постоянного / переменного тока через трансформатор и выпрямитель переменного / постоянного тока.
Традиционное управление преобразователями AC / DC / AC обычно реализуется с помощью преобразователя на стороне нагрузки, регулирующего скорость машины, и преобразователя на стороне источника, регулирующего напряжение промежуточного контура [24, 25].Оценка мощности нагрузки может быть реализована на стороне нагрузки, чтобы сбалансировать поток мощности между источником и нагрузкой, в сочетании с управлением напряжением в звене постоянного тока [26, 27].
В случае систем батарея-суперконденсатор требуется преобразователь постоянного тока в постоянный, чтобы приспособиться к изменчивости напряжения как суперконденсатора, так и двигателя / генератора. Преобразователь постоянного тока в постоянный и управление необходимы для управления состоянием заряда суперконденсатора, которое зависит от скорости транспортного средства [6]. После преобразования постоянного тока в постоянный требуется преобразователь постоянного тока в переменный, если система должна быть подключена к машине переменного тока [7].
В существующей системе с маховиком заряд маховика регулируется через преобразователь на стороне низкого напряжения. Следовательно, управление звеном двигателя маховик-колесо состоит только из рекуперации максимально возможной мощности путем уравновешивания мощности, производимой во время торможения, и мощности, потребляемой маховиком. Ограничения на регенерацию основаны на уровнях напряжения системы, которые будут обсуждаться в следующем разделе.
2.1. Описание системы
Уровни напряжения в системе и номинальная скорость машин, основанные на масштабированной экспериментальной установке, которая в настоящее время строится [17], показаны в таблице 1.Напряжение, наведенное на стороне ВН, в 3 раза выше, чем напряжение, наведенное на стороне НН.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
 7
7 Преобразователь, подключенный к колесной машине (второй преобразователь постоянного / переменного тока в Рисунок 1) работает как управляемый выпрямитель в режиме торможения. Шесть диодов должны иметь отрицательную поляризацию при всех значениях мгновенного напряжения переменного тока, чтобы иметь полный контроль над работой выпрямителя [28].В противном случае диоды будут проводить, а управляемый выпрямитель будет вести себя как обычный диодный выпрямительный мост. Чтобы диоды были заблокированы, напряжение в цепи постоянного тока устанавливается выше, чем пиковое напряжение постоянного тока, генерируемое только диодами, когда колесная машина вращается с максимальной скоростью (около 1000 об / мин). Напряжение промежуточного контура установлено на 300 В.
Напряжение промежуточного контура установлено на 300 В.
Кроме того, напряжение промежуточного контура должно быть выше, чем напряжение на стороне ВН, чтобы передавать энергию обратно на маховик. Однако при номинальной скорости эта разница невелика, как видно на рисунке 2.Сторона ВН может быть подключена к обмоткам НН маховика, чтобы иметь возможность передавать большее количество энергии обратно на маховик во время рекуперативного торможения (если аккумулятор отключен от системы в режиме торможения). Таким образом получается более высокая разность потенциалов.
Пиковое выходное напряжение машины в зависимости от скорости вращения показано на рисунке 2. Точка A отмечает максимальную скорость и напряжение, которые должны быть достигнуты колесной машиной. Точки B и C обозначают номинальную скорость маховика и соответствующие напряжения, создаваемые сторонами ВН и НН.
Напряжение промежуточного контура изменяется пропорционально мощности, регенерированной при рекуперативном торможении, и скорости колесной машины. Разница напряжений между звеном постоянного тока и стороной низкого напряжения маховика является важным ограничением для регенерации.
3. Модель управления
Имитация преобразователя AC / DC / AC на стороне HV маховика была реализована в модели Simulink. В режиме торможения управляемый выпрямитель (постоянный / переменный ток на стороне ВН на рис. 1) регулирует выходные токи колесной машины.Инвертор (переменный / постоянный ток на стороне ВН на рис. 1) управляет мощностью, поступающей на маховик, путем управления входным током и, следовательно, балансирует мощность в системе. Анализ преобразователя можно разделить на стороны выпрямителя и инвертора.
3.1. Сторона выпрямителя
Выпрямитель представляет собой полностью управляемый трехфазный мост. Активный выпрямитель, несмотря на управление напряжением промежуточного контура, может улучшить коэффициент мощности и уменьшить содержание гармоник [29].
В координатах, ориентированных на напряжение, вектор переменного тока линии () может быть разделен на две составляющие и, как в (1).В сбалансированных системах составляющая равна нулю
Компоненты определяют реактивную мощность, а поток активной мощности. Реактивная составляющая переменного тока () может быть установлена на ноль, если требуется единичный коэффициент мощности.
3.2. Inverter Side
Синхронные двигатели с постоянными магнитами (PMSM), как маховик, используемый в предлагаемой системе, описываются многомерной, связанной и нелинейной моделью [30]. Следовательно, преобразование используется для преобразования этих нелинейных уравнений в модель линейного состояния.Уравнения электромагнитного момента PMSM во вращающейся системе отсчета могут быть записаны как
где,,, — напряжения и токи статора соответственно. — сопротивление статора. и — соответственно индуктивности осевого статора. поток ротора. — электромагнитный момент; — количество пар полюсов.
Данная машина поверхностного монтажа; следовательно, . Максимальный крутящий момент на ампер для этой машины получается при выдерживании. Соответствующее уравнение производительности в этом режиме работы:
3.3. Управление балансом мощности
Представленное управление рекуперативным торможением получается путем управления выходной мощностью колесной машины, которая в координатах может быть рассчитана как
В контроле выпрямителя, прямая (активная) составляющая тока сеть переменного тока () вычисляются из опорной мощности. Мощность оценивается на основе моделирования ездового цикла или, на практике, с помощью датчика ускорения.
Блок управления инвертором пытается передать такое же количество энергии из промежуточного контура на маховик.Если постоянный ток () установлен на ноль, мощность, потребляемая маховиком, определяется как
Блок-схема системы управления высоковольтным преобразователем в режиме торможения показана на рисунке 3. В отличие от других традиционных стратегий управления с помощью регулятора постоянного тока [24–27], предлагаемая стратегия управления использует оценку мощности для балансировки потока мощности в маховике. -колесное звено. Следовательно, требуются только регуляторы тока, что устраняет необходимость во внешних контурах и регуляторах напряжения / скорости.Применяется гистерезисное регулирование тока, обеспечивающее быстрый динамический отклик.
Если входная и выходная мощность равны, в идеальном случае промежуточный элемент хранения не требуется. Тем не менее, различия между входной и выходной мощностью неизбежны в реальных системах (например, потери в преобразователе и в колесной машине), и для работы выпрямительного моста необходим накопительный элемент.
3.4. Определение конденсатора промежуточного контура
Электрическая мощность, подаваемая на конденсатор в течение времени задержки, может быть приблизительно равна [24]
где время задержки.Эта передача энергии вызовет изменение напряжения на
Учитывая максимальное изменение нагрузки и изменение напряжения, конденсатор промежуточного контура должен удовлетворять следующим требованиям:
Время задержки можно оценить как сумму номинального времени нарастания отклика ступенчатого тока, времени задержки фильтра и задержки вычисления токового контура. Если время задержки составляет 1 мс, максимальное изменение нагрузки составляет 1,5 кВт, изменение напряжения составляет 10 В, а напряжение в звене постоянного тока составляет 300 В, тогда емкость конденсатора, используемого в настоящем приложении, составляет 22 мФ.Обратите внимание, что изменение нагрузки не может быть изменено, а емкость конденсатора может быть уменьшена только в том случае, если допустимы большие изменения напряжения или если выбрано более низкое напряжение.
4. Результаты
Общее моделирование системы на основе маховика было реализовано в Matlab на основе моделирования ездового цикла [18]. Модель Matlab не входит в подробный уровень компонентов, но моделирует ездовые циклы продолжительностью несколько часов для всей трансмиссии. Чтобы сбалансировать поток мощности между источником и нагрузкой, необходимо знать мгновенную мощность, подаваемую на нагрузку или от нее.Мощность, используемая для моделирования, получена от транспортного средства массой 70 кг с передней площадью 1,1 м 2 . Коэффициент сопротивления воздуха принят равным 0,33.
Модель Simulink системы, показанная на рисунке 3, также была реализована. Моделирование позволяет получить более подробную модель системы, но из-за вычислительных ограничений моделирование может выполняться только в течение короткого времени. Маховик и колесная машина были смоделированы в соответствии с таблицей 1 в реализованном моделировании.
Две имитационные модели системы были запущены в соответствии с одним и тем же циклом привода, который показан на рисунке 4. Модель 1 представляет результаты симуляции Simulink, тогда как Модель 2 является эквивалентной моделью системы в Matlab. Сравнение обеих моделей интересно, поскольку оно позволяет проверить реакцию управления в соответствии с результатами, ожидаемыми от моделирования ездового цикла. Скорость колесной машины снижается полностью электрически, и это снижение должно происходить с правильными темпами, которые зависят от размера транспортного средства.
Изменение мощности нагрузки поддерживается в пределах от 0 до 1,5 кВт, значения, используемые при проектировании конденсатора промежуточного контура. Средняя мощность, вырабатываемая при торможении, составляет 608 Вт. Фактическая скорость автомобиля, рассчитанная на основе моделирования ездового цикла, показана на рисунке 5.
Колесная машина, которая теперь действует как генератор, имеет начальную скорость 570 об / мин, а маховик имеет начальную скорость 4780 об / мин. Напряжение промежуточного контура установлено на 300 В. Мощность, извлекаемая из колес, является эталонным значением в настоящем моделировании.Одна и та же эталонная мощность используется для управления выпрямителем и инвертором, как ранее показано на рисунке 3.
Параметры моделирования были установлены на основе нашей масштабированной экспериментальной установки [31]. Инерция маховика машины составляет 0,364 кг · м 2 , а инерция колесного двигателя (в сочетании со второй машиной, которая представляет собой нагрузку) составляет 1 кг · м 2 .
В модели 1 реализовано гистерезисное регулирование тока с зоной нечувствительности ± 0,1 А.
Напряжение промежуточного контура, которое изменяется в режиме торможения, показано на рисунке 6.Поскольку мощность, подаваемая на конденсатор, и мощность, потребляемая маховиком, одинаковы, конденсатор разряжается, обеспечивая потери в системе.
Конечное напряжение в цепи постоянного тока составляет 260 В для обеих моделей, что указывает на изменение примерно 250 Дж энергии, накопленной в конденсаторе, за 5 с. Таким образом, средняя выходная мощность конденсатора составляет 50 Вт.
Измерение и расчет эффективности рекуперативного торможения не так очевидны. Один из способов оценить это — вычислить, сколько фактической энергии торможения возвращается аккумулятору / маховику в течение определенного цикла движения.Учитывая, что средняя мощность, производимая при торможении, составляет 608 Вт, КПД при передаче от колес к накопителю маховика составляет около 92%, в результате чего КПД в оба конца (от колеса к колесу) превышает 80%.
Скорость колесной машины во время торможения показана на рисунке 7. Различные скорости падения соответствуют разным величинам регенерированной мощности.
Скорость маховика, показанная на Рисунке 8, для обеих моделей 1 и 2 увеличивается из-за регенерированной мощности.Скорость маховика увеличивается меньше по сравнению с изменением скорости колесной машины, так как маховик имеет более высокую начальную скорость и, следовательно, большее количество запасенной энергии.
Статистический анализ показывает, что для всех трех симуляций (рисунки 6, 7 и 8), выполненных как в Simulink (Модель 1), так и в Matlab (Модель 2), существует статистически значимая корреляция между двумя моделями. Это означает, что модели одинаково реагируют на вводимые им данные.Медиана различий между моделями статистически значимо отличается от нуля. Это означает, что одна из моделей дает более низкие значения, чем другая для данного входа.
На основе смоделированных моделей были получены другие результаты, помимо сопоставленных расчетов, показанных на рисунках 6, 7 и 8. Преобразователь переменного тока в постоянный и переменный ток подключен к низковольтной стороне маховика во время режима торможения в модели Simulink ( Модель 1). Сторона низкого напряжения маховика работает как двигатель и управляется, поэтому его постоянный ток () равен нулю.Мощность, потребляемая маховиком, затем устанавливается величиной квадратурного тока (), как показано на рисунке 9. Показано, что реализованный регулятор тока может поддерживать токи равными их эталонным значениям, независимо от мощности нагрузки. колебания при торможении.
Выходные ток и напряжение колесной машины показаны на рисунке 10. Машина работает как генератор и подключена к управляемому выпрямителю. Низкое содержание гармоник и единичный коэффициент мощности достигаются за счет управляемого выпрямления и регулирования тока соответственно.
Напряжение промежуточного контура и пиковое значение линейных напряжений (сторона низкого напряжения маховика и колесная машина), полученные из модели Matlab (Модель 2), показаны на рисунке 11. Начальные значения напряжения приведены в соответствии с соотношением между скоростью и напряжением в машинах, показанными в таблице 1.
Выходные напряжения обеих машин ниже, чем напряжение промежуточного контура, и регенерация может быть полностью достигнута только при наличии такой разницы напряжений. Напряжение промежуточного контура падает, чтобы восполнить потери в системе, и его следует перезарядить до 300 В, когда произойдет следующее ускорение.
Дальнейшая работа заключается в экспериментальной реализации моделируемой стратегии управления вместе с полным приводом на основе маховика. Затем стратегию управления следует экспериментально сравнить с другими стратегиями управления, уделяя особое внимание функциональности и эффективности системы.
5. Выводы
Представлено управление балансом мощности для преобразователя AC / DC / AC, применяемого при рекуперативном торможении. Преобразователь работает между двумя машинами переменного тока с переменной частотой и амплитудой.
Модель Matlab была реализована и смоделирована на основе стандартных циклов привода и эквивалентной схемы системы на стороне высокого напряжения. Детальное моделирование системы в Simulink было реализовано на основе параметров нашей экспериментальной установки.
Сравнение результатов моделирования показало хорошее совпадение. Результаты подтвердили работоспособность предложенного управления и возможность полной регенерации.
Разницу между результатами двух моделей можно отнести к упрощению Модели 2 по сравнению с Моделью 1.В модели 1 учитываются разные потери, и не все они изменяются в одинаковой пропорции (например, потери включения / выключения в переключателях и потери в диодах). Кроме того, в Модели 2 не учитывается инерция машин, поскольку соотношение между скоростью и напряжением дается напрямую. Однако результаты обеих моделей показывают хорошее совпадение с аналогичными скоростями разрядки в конденсаторе и одинаковыми начальными / конечными значениями скорости в машине.
Предлагаемое управление обеспечивает надежную реакцию, при которой скорость колесной машины изменяется в соответствии с мощностью, рассчитанной на основе цикла движения.Кроме того, предлагаемое управление проще в реализации, чем обычно используемые стратегии управления преобразователем AC / DC / AC, поскольку оно не требует внешних контуров.
По результатам моделирования был получен относительно высокий средний КПД (92%). Значение КПД объясняется высоким КПД маховика и используемой силовой электроники.
Результаты моделирования также показали полный контроль работы маховика машины с поддержанием постоянного тока равным нулю.Единственный коэффициент мощности может быть достигнут на стороне колесной машины с уменьшением содержания гармоник, обычно производимых при использовании пассивного выпрямления.
Журнал Low Processing Fee Journal в EEE / ECE / E & I / ECE / ETE — Impact Factor-7.122
IJAREEIE — это инициатива по обеспечению международной платформы для качественных исследовательских работ. Для управления различными расходами, связанными с ведением журнала, для всех принятых статей предусмотрена плата за обработку или обработку рукописей.Авторы могут зачислить платеж на соответствующие номера счетов, указанные в письме о приеме, и способ оплаты может быть либо через онлайн-банкинг (NEFT), либо через прямой перевод в филиале.
ПУБЛИКАЦИОННЫЙ ПЛАТА ЗА КАЖДУЮ ПРИНЯТУЮ ДОКУМЕНТУ
Из-за проблем с COVID-19 плата за обработку немедленно пересматривается следующим образом:
Название | Индийские авторы | Иностранные авторы |
Тип публикации / сборы | рупий.700 или 900 рупий или 1300 рупий | 50USD или 100USD |
Дополнительная печатная копия | рупий.500 за копию | 40 долларов США за копию |
Электронная копия свидетельства о публикации | Бесплатно | Бесплатно |
Если превышает 8 страниц: | 100 рупий за каждую дополнительную страницу | 5 долларов США за каждую дополнительную страницу |
Авторы из зарубежных стран (кроме ИНДИИ) могут оплатить сбор за публикацию рукописи с помощью Paypal.Пожалуйста, нажмите кнопку ниже, чтобы оплатить сбор.
Управление балансом мощности в преобразователе переменного / постоянного / переменного тока для рекуперативного торможения в двухуровневом приводе на основе маховика Академический исследовательский документ на тему «Электротехника, электроника, информационная инженерия»
Hindawi Publishing Corporation Международный журнал автомобильных технологий, том 2011, ID статьи 934023, 9 страниц doi: 10.1155 / 2011/934023
Исследовательская статья
Контроль баланса мощности в преобразователе переменного / постоянного / переменного тока для рекуперативного торможения в двухуровневом приводе с маховиком
Янаина Г.Оливейра, Йохан Лундин и Ханс Бернхофф
Отделение электроэнергии, Департамент технических наук, Уппсальский университет, P.O. Box 534, 75121 Упсала, Швеция
Корреспонденцию следует направлять Джанаине Г. Оливейре, [email protected] Получено 10 мая 2011 г .; Пересмотрено 2 августа 2011 г .; Принята в печать 24 августа 2011 г. Академический редактор: Шинсуке Хара
Авторские права © 2011 Janaina G. Oliveira et al. Это статья в открытом доступе, распространяемая по лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии правильного цитирования оригинальной работы.
Использование маховика в качестве механизма управления мощностью может увеличить емкость накопителя энергии и уменьшить количество циклов зарядки / разрядки аккумулятора. Кроме того, способность восстанавливать энергию транспортного средства во время торможения может повысить эффективность системы. В исследуемой здесь полностью электрической трансмиссии на основе маховика есть новинка, заключающаяся в использовании двухобмоточного двигателя / генератора с маховиком, который делит систему на два различных уровня напряжения, повышая эффективность электрической трансмиссии.Соединение двух электрических машин переменного тока (т. Е. Маховика и колесного двигателя) с разной и переменной рабочей частотой является сложной задачей. Реализовано управление согласованием мощности, применяемое к преобразователю AC / DC / AC. Преобразователь AC / DC / AC регенерирует электроэнергию, преобразованную во время торможения в маховик, используемый здесь в качестве устройства управления мощностью. Управляя балансом мощности, одно и то же оборудование может использоваться для ускорения и торможения, обеспечивая снижение гармоник и надежную реакцию.Моделирование всей системы в режиме торможения было выполнено как в Matlab, так и в Simulink, и их результаты были сопоставлены. Функциональные возможности предложенного элемента управления были показаны и обсуждены, при этом достигнута полная регенерация. Достигнута эффективность двустороннего движения (от колеса к колесу) более 80%.
1. Введение
В автомобильной промышленности наблюдается четкая тенденция к использованию большего количества электрических систем для удовлетворения постоянно растущих требований к автомобильной нагрузке.Ожидается, что в ближайшие 10-20 лет автомобильные электроэнергетические системы претерпят кардинальные изменения [1].
В электромобилях, описанных в литературе, мощность передается от колес непосредственно к основному накопителю энергии (например, батареям) во время рекуперативного торможения [2]. Традиционно аккумулятор напрямую подключается к колесному двигателю [3]. Однако комбинация первичного источника энергии, например батарей, и буфера мощности может использоваться для удовлетворения пиковых требований к энергии / мощности электромобиля.Системы тяги электромобилей, которые сочетают в себе суперконденсатор или буфер пиковой мощности маховика с источником энергии батареи, также называются двойными источниками питания.
Комбинация аккумулятор-суперконденсатор для автомобильного применения описана в литературе [4-7]. Результаты показывают, что суперконденсаторы обладают высокой внутренней эффективностью и могут заряжаться и разряжаться большое количество раз без ухудшения рабочих характеристик. Однако стоимость суперконденсатора в кВт / ч оценивается в пределах 10000-20000 \ $ / кВтч.С другой стороны, маховики имеют стоимость киловатт-часа, оцениваемую в пределах 500-1000 \ $ / кВтч [8, 9]. Кроме того, маховики обеспечивают стабильное напряжение и уровень мощности независимо от нагрузки, температуры или уровня заряда; химия не включена, следовательно, не связано с загрязнением окружающей среды, а эффективность и жизненные циклы аналогичны тем, которые представлены для суперконденсаторов [10, 11].
Рекуперативное торможение позволяет восстанавливать энергию при снижении скорости автомобиля. Затем кинетическая энергия преобразуется и сохраняется, уменьшая рассеивание энергии в тепло и частицы, которые опасны для окружающей среды и здоровья [12], как в
.
тормоза обычные.При движении по городу от одной трети до половины потребляемой энергии теряется при торможении [13]. Однако сегодня практический предел восстановления кинетической энергии в электромобилях низкий, около 40%, в зависимости от множества факторов, таких как степень заряда аккумулятора или количество колес, оборудованных для использования системы рекуперативного торможения [14].
Если используется буфер мощности, он может справиться со всеми большими колебаниями мощности от колес вместо передачи их на аккумулятор.Следовательно, это может повысить общую эффективность рекуперативного торможения [15]. Опубликованные результаты показали, что КПД в обоих направлениях составляет около 60% для систем батарея-суперконденсатор [6, 16], что является сложной стратегией управления, необходимой для регенерации, поскольку необходимо постоянно контролировать начальные условия суперконденсатора.
Обсуждаемая здесь система соединяет колесный двигатель с промежуточным маховиковым двигателем / генератором, который работает как устройство управления мощностью.Таким образом, во время рекуперативного торможения вся мощность поглощается маховиком, а аккумулятор вообще не заряжается.
В данной статье основное внимание уделяется эффективному рекуперации энергии торможения для повышения эффективности системы, особенно при движении с остановками в городских условиях. Стратегия управления была разработана таким образом, чтобы поглощать мощность, вырабатываемую колесами во время торможения с помощью маховика. Поток мощности во время цикла движения, когда скорость транспортного средства уменьшается, был вычислен и использован в полном моделировании системы в Simulink.Параметры моделирования были выбраны в соответствии с нашей экспериментальной установкой, которая уже была испытана в тяговом режиме [17].
Содержание статьи следующее: Раздел 2 представляет описание исследуемой системы. В разделе 3 представлена схема управления и критерии проектирования преобразователя AC / DC / AC. Преобразователь разделен на выпрямитель и инвертор для упрощения его анализа. В разделе 4 показаны результаты моделирования как для моделей Matlab, так и для Simulink.
2. Общее описание системы
Система маховика физически разделена на два уровня напряжения через обмотки статора маховика машины. Каждая сторона соединяет маховик машины с другим компонентом системы (например, аккумулятором или колесным двигателем). Подключение осуществляется через преобразователи мощности, которые преобразуют входной / выходной сигнал в форму и частоту, необходимые для подключения системы.
Таким образом, батареи
могут быть оптимизированы в отношении плотности энергии.Пики мощности передаются / поглощаются маховиком во время разгона / торможения. Аккумулятор не подвергается частым циклам зарядки / разрядки. Все преимущества увеличивают срок службы батареи, уменьшают размер аккумуляторной батареи и увеличивают ее возможности хранения энергии [18]. Схематическое изображение предлагаемой системы маховика показано на рисунке 1.
Машина с двумя уровнями напряжения может работать одновременно как двигатель и генератор между двумя силовыми шинами на
различных мощностей [19].Коэффициент трансформации определяет противо-ЭДС сторон напряжения.
Преобразователь AC / DC / AC соединяет колесный двигатель с высоковольтной (HV) обмоткой маховика, как показано на Рисунке 1. Когда автомобиль находится в режиме тяги, мощность перетекает от аккумулятора к колесам. Аккумулятор обеспечивает плавную подачу энергии, в то время как маховик обеспечивает пиковые значения мощности, необходимые во время цикла движения. В режиме торможения мощность передается от колес к маховику машины.
В литературе мало сообщений о соединении и управлении двумя трехфазными машинами переменного тока с различной и регулируемой скоростью работы.Сообщалось о статическом трехфазном преобразователе мощности для привода переменного тока в электросети [20, 21]. Хотя здесь асинхронная машина управляется с переменной скоростью, линия электроснабжения соответствует бесконечной шине с постоянной частотой и напряжением. Применение с низким энергопотреблением от однофазного до трехфазного переменного / постоянного / переменного тока описано в [22]. Трехфазные инверторы постоянного / переменного тока, используемые в тяговом движении (локомотив), питаются от сети (пантограф) либо постоянного, либо однофазного переменного тока, как описано в [23].В случае питания переменного тока (однофазная) сеть подключается к трехфазному инвертору постоянного / переменного тока через трансформатор и выпрямитель переменного / постоянного тока.
Традиционное управление преобразователями AC / DC / AC обычно осуществляется с помощью преобразователя на стороне нагрузки, регулирующего скорость машины, и преобразователя на стороне источника, регулирующего напряжение промежуточного контура [24, 25]. Оценка мощности нагрузки может быть реализована на стороне нагрузки, чтобы сбалансировать поток мощности между источником и нагрузкой, в сочетании с управлением напряжением в звене постоянного тока [26, 27].
В случае систем батарея-суперконденсатор требуется преобразователь постоянного тока в постоянный, чтобы приспособиться к изменчивости напряжения как суперконденсатора, так и двигателя / генератора. Преобразователь постоянного тока в постоянный и управление необходимы для управления состоянием заряда суперконденсатора, которое зависит от скорости транспортного средства [6]. После преобразования постоянного тока в постоянный требуется преобразователь постоянного тока в переменный, если система должна быть подключена к машине переменного тока [7].
В существующей системе с маховиком заряд маховика регулируется через преобразователь на стороне низкого напряжения.Следовательно, управление звеном двигателя маховик-колесо состоит только из рекуперации максимально возможной мощности путем уравновешивания мощности, производимой во время торможения, и мощности, потребляемой маховиком. Ограничения на регенерацию основаны на уровнях напряжения системы, которые будут обсуждаться в следующем разделе.
2.1. Описание системы. Уровни напряжения системы и номинальная скорость машин, основанные на масштабированной экспериментальной установке, которая в настоящее время строится [17], показаны в Таблице 1.Напряжение, наведенное на стороне ВН, в 3 раза выше, чем напряжение, наведенное на стороне НН.
Преобразователь, подключенный к колесной машине (второй преобразователь постоянного / переменного тока на рисунке 1), работает как управляемый выпрямитель в режиме торможения. Шесть диодов должны иметь отрицательную поляризацию при всех значениях мгновенного напряжения переменного тока, чтобы иметь полный контроль над работой выпрямителя [28]. В противном случае диоды будут проводить и управляемый
Линия постоянного тока
Колесный двигатель
Рис. 1: Схематическое изображение системы электрического привода со встроенным маховиком.
Таблица 1: Напряжение при номинальной частоте вращения маховика и колеса машины.
Аккумуляторная батарея со стороны низкого напряжения Маховик со стороны ВН со стороны постоянного тока Колесная машина
Пиковое напряжение RMS напряжение 100 В постоянного тока 100 В постоянного тока 73 Ваб 52 В переменного тока 220 В переменного тока 156 В постоянного тока 300 В постоянного тока 300 В постоянного тока 230 В переменного тока 163,7 В переменного тока
Скорость, œ 5000 об / мин 750 об / мин
Выпрямитель
будет вести себя как обычный диодный выпрямительный мост. Чтобы диоды были заблокированы, напряжение в цепи постоянного тока устанавливается выше, чем пиковое напряжение постоянного тока, генерируемое только диодами, когда колесная машина вращается с максимальной скоростью (около 1000 об / мин).Напряжение промежуточного контура установлено на 300 В.
Кроме того, для передачи энергии обратно на маховик напряжение промежуточного контура должно быть выше, чем напряжение на стороне ВН. Однако при номинальной скорости эта разница невелика, как видно на Рисунке 2. Сторона ВН может быть подключена к обмоткам НН маховика, чтобы иметь возможность передавать большее количество энергии обратно на маховик во время рекуперации. торможение (если аккумулятор отключен от системы в режиме торможения).Таким образом получается более высокая разность потенциалов.
Пиковое выходное напряжение машины в зависимости от скорости вращения показано на рисунке 2. Точка A отмечает максимальную скорость и напряжение, которые должны быть достигнуты колесной машиной. Точки B и C обозначают номинальную скорость маховика и соответствующие напряжения, создаваемые сторонами ВН и НН.
Напряжение промежуточного контура изменяется пропорционально мощности, регенерированной во время рекуперативного торможения, и скорости колесной машины.Разница напряжений между звеном постоянного тока и стороной низкого напряжения маховика является важным ограничением для регенерации.
3. Управляющая модель
Моделирование преобразователя AC / DC / AC на стороне HV маховика было реализовано в модели Simulink. В режиме торможения управляемый выпрямитель (постоянный / переменный ток на стороне ВН на рис. 1) регулирует выходные токи колесной машины. Инвертор (переменный / постоянный ток на стороне ВН на рисунке 1) управляет
2000 4000
Вт (об / мин)
Рис. 2: Пиковое напряжение, создаваемое маховиком и колесной машиной, соответственно, в зависимости от скорости вращения и напряжения промежуточного контура.
, мощность, протекающая в маховик, путем управления входным током и, следовательно, уравновешивает мощность в системе. Анализ преобразователя можно разделить на стороны выпрямителя и инвертора.
3.1. Сторона выпрямителя. Выпрямитель представляет собой полностью управляемый трехфазный мост. Активный выпрямитель может, несмотря на управление звеном постоянного тока
, улучшают коэффициент мощности и уменьшают содержание гармоник [29].
В ориентированных на напряжение координатах d-q вектор переменного тока линии (4bc) может быть разделен на две составляющие, iq и id, как в (1).Составляющая I0 в уравновешенных системах равна нулю
«cos (0) cos (0) cos (0) ‘sin (0) sin (0) sin (0)
Компоненты iq определяют реактивную мощность, а id определяет поток активной мощности. Реактивная составляющая переменного тока (Iq_wm) может быть установлена на ноль, если требуется единичный коэффициент мощности.
3.2. Сторона инвертора. Синхронные двигатели с постоянными магнитами (PMSM), как маховик, используемый в предлагаемой системе, описываются многомерной, связанной и нелинейной моделью [30].Поэтому преобразование d-q используется для преобразования этих нелинейных уравнений в модель линейного состояния. Уравнения электромагнитного момента PMSM во вращающейся системе отсчета можно записать как
Te = — ~ [friq + [id -Lq) iqid \
, где Ud, uq, id и iq — напряжения и токи статора соответственно. •
При управлении выпрямителем постоянная (активная) составляющая переменного тока линии (ид.WM) вычисляется из опорного штифта мощности. Мощность оценивается на основе моделирования ездового цикла или, на практике, с помощью датчика ускорения.
Блок управления инвертором пытается передать такое же количество мощности Pin от промежуточного контура на маховик. Если постоянный ток (Id) установлен на ноль, мощность, потребляемая маховиком, равна
.
-Pout = 2 (y? — / »
Блок-схема системы управления высоковольтным преобразователем в режиме торможения показана на рисунке 3.В отличие от
других традиционных стратегий управления с регулятором звена постоянного тока [24-27], предложенная стратегия управления использует оценку мощности для уравновешивания потока мощности в звене маховика и колеса. Следовательно, требуются только регуляторы тока, что устраняет необходимость во внешних контурах и регуляторах напряжения / скорости. Применяется гистерезисное регулирование тока, обеспечивающее быстрый динамический отклик.
Если входная и выходная мощности равны, в идеальном случае промежуточный элемент хранения не требуется.Тем не менее, различия между входной и выходной мощностью неизбежны в реальных системах (например, потери в преобразователе и в колесной машине), и для работы выпрямительного моста необходим накопительный элемент.
3.4. Определение конденсатора промежуточного контура. Электрическая мощность, подаваемая на конденсатор в течение времени задержки, может быть приблизительно равна [24]
A-Pmax Tr 2
где Tr — время задержки. Эта передача энергии вызовет изменение напряжения на
AVdc =
Учитывая максимальное изменение нагрузки APmax и изменение напряжения AVdc (max), конденсатор промежуточного контура должен удовлетворять следующему требованию:
Тр АПм
2VdcAVdc (макс.)
Время задержки можно оценить как сумму номинального времени нарастания отклика ступенчатого тока, времени задержки фильтра и задержки вычисления токового контура.Если время задержки Tr составляет 1 мс, максимальное изменение нагрузки APmax составляет 1,5 кВт, изменение напряжения AVdc (max) составляет 10 В, а напряжение в звене постоянного тока Vdc составляет 300 В, тогда конденсатор, который будет использоваться в настоящее приложение составляет 22 мФ. Обратите внимание, что изменение нагрузки не может быть изменено, а значение емкости конденсатора может быть уменьшено только в том случае, если допустимы большие изменения напряжения A Vac (макс.) Или если выбрано более низкое напряжение Vdc.
4. Результаты
Общее моделирование системы на основе маховика было реализовано в Matlab на основе моделирования ездового цикла [18].Модель Matlab не входит в подробный уровень компонентов, но моделирует ездовые циклы продолжительностью несколько часов для всей трансмиссии. Чтобы сбалансировать поток мощности между источником и нагрузкой, необходимо знать мгновенную мощность, подаваемую на нагрузку или от нее. Силовой Pin, который является входом в моделирование, получен для транспортного средства весом 70 кг и с передней площадью 1,1 м2. Коэффициент сопротивления воздуха Cw принят равным 0,33.
Модель Simulink системы, показанная на рисунке 3, также была реализована.Моделирование позволяет получить более подробную модель системы, но из-за вычислительной
Инвертор
WFW Режим маховика двигателя LV соединение
Привод ворот
i регулятор
i * iabc s
abc dq
Выпрямитель
Привод ворот
i регулятор f
Колесный генератор
Рисунок 3: Блок-схема системы управления высоковольтным преобразователем в режиме торможения.
, моделирование может быть запущено только в течение короткого времени. Маховик и колесная машина были смоделированы в соответствии с таблицей 1 в реализованном моделировании.
Две имитационные модели системы были запущены в соответствии с одним и тем же циклом привода, который показан на рисунке 4. Модель 1 представляет результаты симуляции Simulink, тогда как Модель 2 является эквивалентной моделью системы в Matlab. Сравнение обеих моделей интересно, поскольку оно позволяет проверить реакцию управления в соответствии с результатами, ожидаемыми от моделирования ездового цикла.Скорость колесной машины снижается полностью электрически, и это снижение должно происходить с правильными темпами, которые зависят от размера транспортного средства.
Мощность нагрузки колеблется в пределах от 0 до 1,5 кВт, значения используются при проектировании конденсатора промежуточного контура. Средняя мощность, вырабатываемая при торможении, составляет 608 Вт. Фактическая скорость автомобиля, рассчитанная на основе моделирования ездового цикла, показана на рисунке 5.
Колесная машина, которая теперь действует как генератор, имеет начальную скорость 570 об / мин, а маховик — 4780 об / мин.Напряжение промежуточного контура установлено на 300 В. Мощность, извлекаемая из колес, является эталонным значением в настоящем моделировании. Одна и та же опорная мощность используется для управления выпрямителем и инвертором, как показано на Рисунке 3.
0,4 -0,2 —
0 Дж-1-1-1-1-1-1-1-1-1-
12 3 4
Время (с)
Рисунок 4: Регенерированные мощности, используемые в качестве опорной мощности в предлагаемом управлении.
Параметры моделирования были установлены на основе нашей масштабной экспериментальной установки [31]. Инерция маховика машины составляет 0,364 кг-м2, а инерция колесного двигателя
.
Время (с)
Рис. 5: Скорость автомобиля, полученная в результате моделирования ездового цикла.
(в сочетании со второй машиной, представляющей нагрузку) составляет 1 кг-м2.
Гистерезисный контроль тока реализован в модели 1 с зоной нечувствительности ± 0.1 А.
Напряжение промежуточного контура, которое изменяется в режиме торможения, показано на рисунке 6. Поскольку мощность, подаваемая на конденсатор, и мощность, потребляемая маховиком, одинаковы, конденсатор разряжается, обеспечивая потери в системе.
Конечное напряжение в звене постоянного тока составляет 260 В для обеих моделей, что указывает на изменение примерно 250 Дж энергии, запасенной в конденсаторе, за 5 с. Таким образом, средняя выходная мощность конденсатора составляет 50 Вт.
Измерение и расчет эффективности рекуперативного торможения не так очевидны.Один из способов оценить это — вычислить, сколько фактической энергии торможения возвращается аккумулятору / маховику в течение определенного цикла движения. Учитывая, что средняя мощность, производимая при торможении, составляет 608 Вт, КПД при передаче от колес к накопителю маховика составляет около 92%, в результате чего КПД в оба конца (от колеса к колесу) превышает 80%.
Скорость колесной машины во время торможения показана на рисунке 7. Различные скорости падения соответствуют разным величинам регенерированной мощности.
Скорость маховика, показанного на Рисунке 8, для обеих моделей 1 и 2 увеличивается из-за регенерированной мощности. Скорость маховика увеличивается меньше по сравнению с изменением скорости колесной машины, так как маховик имеет более высокую начальную скорость и, следовательно, большее количество запасенной энергии.
Статистический анализ показывает, что для всех трех симуляций (Рисунки 6, 7 и 8), выполненных как в Simulink (Модель 1), так и в Matlab (Модель 2), существует статистически значимая корреляция между двумя моделями.Это означает, что модели одинаково реагируют на вводимые им данные. Медиана различий между моделями статистически значимо отличается от нуля. Это означает, что
Время (с)
— Модель 1
o Модель 2
Рисунок 6: Напряжение промежуточного контура.
Время (с)
— Модель 1
o Модель 2
Рисунок 7: Скорость колесной машины при торможении.
одна из моделей дает более низкие значения, чем другая для данного входа.
На основе смоделированных моделей были получены и другие результаты, помимо сравниваемых имитаций, показанных на рисунках 6, 7 и 8. Преобразователь переменного / постоянного / переменного тока подключен к низковольтной стороне маховика во время режима торможения в модели Simulink (Модель 1). Сторона низкого напряжения маховика работает как двигатель и управляется, поэтому его постоянный ток (id) равен нулю. Мощность, потребляемая маховиком, затем задается значением квадратурного тока (iq), как показано на рисунке 9.Показано, что реализованный регулятор тока способен поддерживать токи равными их эталонным значениям, независимо от изменения мощности нагрузки при торможении.
5000–
4950–
и 4900–
4850–
4800–
Время (с)
— Модель 1
O Модель 2
Рис. 8: Скорость маховика машины при торможении.
Время (с)
Рис. 9: Квадратурный и постоянный ток на стороне НН маховика, действующий здесь как двигатель.
Выходные ток и напряжение колесной машины показаны на рисунке 10. Машина работает как генератор и подключена к управляемому выпрямителю. Низкое содержание гармоник и единичный коэффициент мощности достигаются за счет управляемого выпрямления и регулирования тока соответственно.
Напряжение промежуточного контура и пиковое значение линейных напряжений (сторона низкого напряжения маховика и колесная машина), полученные из модели Matlab (Модель 2), показаны на рисунке 11.Начальные значения напряжения, соответствующие соотношению между скоростью и напряжением в машинах, показаны в таблице 1.
Выходные напряжения обеих машин ниже, чем напряжение промежуточного контура, и полная регенерация возможна только
1 1,02 1,04 1,06
Время (с)
Рис. 10: Выходной ток и напряжение колесной машины.
350 300 250> 200 —
или 150>
100 50 0
Время (с)
Рисунок 11: Напряжение в звене постоянного тока и пиковые значения линейных напряжений в машинах.
, пока существует эта разница напряжений. Напряжение промежуточного контура падает, чтобы восполнить потери в системе, и его следует перезарядить до 300 В, когда произойдет следующее ускорение.
Дальнейшая работа заключается в экспериментальной реализации моделируемой стратегии управления вместе со всей трансмиссией на основе маховика. Затем стратегию управления следует экспериментально сравнить с другими стратегиями управления, уделяя особое внимание функциональности и эффективности системы.
5. Выводы
Представлено управление балансом мощности для преобразователя переменного / постоянного / переменного тока, применяемого при рекуперативном торможении. Преобразователь работает между двумя машинами переменного тока с переменной частотой и амплитудой.
Модель Matlab была реализована и смоделирована на основе стандартных циклов привода и эквивалентной схемы системы на стороне высокого напряжения. Детальное моделирование системы в Simulink было реализовано на основе параметров нашей экспериментальной установки.
Сравнение результатов моделирования показало хорошее совпадение. Результаты подтвердили работоспособность предложенного управления и возможность полной регенерации.
Разницу между результатами двух моделей можно отнести к упрощению Модели 2 по сравнению с Моделью 1. В Модели 1 учитываются разные потери, и не все они варьируются в одинаковой пропорции (например, включение / потери в переключателях и диодные потери).Кроме того, в Модели 2 не учитывается инерция машин, поскольку соотношение между скоростью и напряжением дается напрямую. Тем не менее, результаты обеих моделей показывают хорошее совпадение с аналогичными скоростями разрядки в конденсаторе и одинаковыми начальными / конечными значениями скорости в машине.
Предлагаемое управление обеспечивает надежную реакцию, при которой скорость колесной машины изменяется в соответствии с мощностью, рассчитанной на основе цикла движения. Кроме того, предлагаемое управление проще в реализации, чем обычно используемые стратегии управления преобразователем AC / DC / AC, поскольку оно не требует внешних контуров.
По результатам моделирования был получен относительно высокий средний КПД (92%). Значение КПД объясняется высоким КПД маховика и используемой силовой электроники.
Результаты моделирования также показали полный контроль работы маховика машины, при этом постоянный ток оставался равным нулю. Единственный коэффициент мощности может быть достигнут на стороне колесной машины с уменьшением содержания гармоник, обычно производимых при использовании пассивного выпрямления.
Список литературы
[1] П. Фэрли, «Лежачие полицейские для зарядки электромобиля», IEEE Spectrum, vol. 47, нет. 1. С. 13-14, 2010.
[2] М. Е, З. Бай и Б. Цао, «Надежное управление рекуперативным торможением аккумуляторного электромобиля», IET Control Theory and Applications, vol. 2, вып. 12. С. 1105-1114, 2008.
.
[3] Х. Секи, К. Исихара и С. Тадакума, «Новое управление рекуперативным торможением кресла-коляски с электроприводом для безопасного вождения по склону», IEEE Transactions on Industrial Electronics, vol.56, нет. 5. С. 1393-1400, 2009.
.
[4] S. Pay и Y. Baghzouz, «Эффективность комбинации аккумулятор-суперконденсатор в электромобилях», в Proceedings of the IEEE Bologna Power Tech Conference, vol. 3, стр. 1-6, Болонья, Италия, 2003.
[5] Т.А. Смит, Дж. П. Марс и Г. А. Тернер, «Использование суперконденсаторов для улучшения характеристик батарей», в материалах 33-й ежегодной конференции специалистов по силовой электронике IEEE (PESC ’02), стр. 124–128, Квинсленд, Австралия, 2002 г.
[6] Ю. П. Ян, Дж. Лю и Т. Ху, «Система управления энергией для электрического самоката с прямым приводом», Energy Conversion and Management, vol. 52, нет. 1. С. 621-629, 2011.
.
[7] Дж. Диксон, М. Ортузар и Э. Вихманн, Регенеративное торможение электромобиля с использованием ультраконденсаторов и Buck-Boost
Преобразователь
, Международный симпозиум по электромобилям, Монреаль, Канада, 2000.
[8] I.Hadjipaschalis, A. Poullikkas и V. Efthimiou, «Обзор текущих и будущих технологий хранения энергии для электроэнергетических приложений», Renewable and Sustainable Energy Reviews, vol. 13, нет. 6-7, стр. 1513-1522, 2009.
[9] Г. Пистойя, Устройства и системы с батарейным питанием, Эльзевир, Нью-Йорк, Нью-Йорк, США, 2008.
[10] Дж. Цибулка, «Система рекуперации кинетической энергии посредством накопления энергии маховиком», Advanced Engineering, vol. 3, вып. 1. С. 27-38, 2009.
[11] А. Барин, Л. Н. Канха, А. Р. Абайде и К. Ф. Магнаго, «Выбор технологий хранения энергии в сценарии качества электроэнергии, AHP и нечеткая логика», в материалах 35-й ежегодной конференции Общества промышленной электроники IEEE. (IECON ’09), стр. 3615-3620, Порту, Португалия, ноябрь 2009 г.
[12] М. Гассер, М. Ридикер, Л. Мюллер и др., «Токсическое воздействие частиц износа тормозов на эпителиальные клетки легких in vitro» Токсикология частиц и волокон, том.6, вып. 30, 2009.
[13] Z. Junzhi, L. Xin, C. Shanglou и Z. Pengjun, «Скоординированное управление системой рекуперативного торможения», в Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC ’08), pp. 1-6, Hei Longjiang, China, September 2008.
[14] Дж. Лармини и Дж. Лоури, «Объяснение технологии электромобилей», John Wiley & Sons, Чичестер, Великобритания, 2003.
[15] MK Yoong, YH Gan, GD Gan et al., «Исследования рекуперативного торможения в электромобиле», в Proceedings of the IEEE Sustainable Utilization and Development in Engineering and Technology Conference (STUDENT ’10), Куала-Лумпур, Малайзия , 2010.
[16] П. Кларк, Т. Мунер и К. Куллинан, «Снижение выбросов транспортных средств с помощью рекуперативного торможения», Транспортные исследования, Часть D: Транспорт и окружающая среда, том. 15, нет. 3. С. 160-167, 2010.
.
[17] Дж. Абрахамссон, Дж. Сантьяго, Дж. Г. Оливейра, Дж. Лундин и Х. Бернхофф, «Прототип электрической трансмиссии с двухобмоточным двигателем на магнитной подвеске», в Трудах 19-й Международной конференции по электрическим машинам (ICEM ‘ 10), стр.1-5, Рим, Италия, сентябрь 2010 г.
[18] Дж. Лундин, Маховик в полностью электрической двигательной установке, дипломная работа, Уппсальский университет, Упсала, Швеция, 2011.
[19] Дж. Сантьяго, А. Ларссон и Х. Бернхофф, «Трансмиссия с двойным напряжением для транспортных средств», Международный журнал Emerging Electric Power Systems, вып. 11, вып. 3, 1, 2010.
[20] W. Chien и Y. Tzou, «Анализ и проектирование по уменьшению количества электролитических конденсаторов промежуточного контура для преобразователей переменного / постоянного / переменного тока, применяемых в двигателях переменного тока», в материалах 29-й ежегодной конференции специалистов по силовой электронике IEEE (PESC ’98), т.1. С. 275-279, Синьчжу, Тайвань, 1998.
[21] Б. Ван и Г. Венкатараманан, «Устройство динамического восстановления напряжения, использующее матричный преобразователь и маховик накопителя энергии», IEEE Transactions on Industry Applications, vol. 45, нет. 1. С. 222231, 2009.
[22] К. Рафаль, М. Бобровска, Дж. А. Баррена и М. П. Казмерковский, «Компонентный преобразователь переменного / постоянного / переменного тока с минимизацией компонентов с балансировкой напряжений конденсаторов промежуточного контура», в Proceedings of the IEEE EUROCON, pp. 861- 866, Санкт-Петербург, Россия, 2009.
[23] А. Эль Магри, Ф. Гири, А. Абулоифа и Ф. З. Чауи, «Надежное управление синхронным двигателем с помощью преобразователей переменного / постоянного / переменного тока», Control Engineering Practice, vol. 18, нет. 5. С. 540-553, 2010.
.
[24] Л. Малезани, Л. Россетто, П. Тенти и П. Томасин, «Преобразователь AC / DC / AC PWM с уменьшенным накоплением энергии в звене постоянного тока»,
IEEE Transactions on Industry Applications, vol. 31, нет. 2. С. 287-292, 1995.
.
[25] М.Ясинский, М. Малиновский, депутат Казмерковски, Х.К. Соренсен, Э. Фриис-Мадсен и Д. Сверчински, «Управление преобразователем переменного тока в постоянный и переменный ток для морской системы преобразования энергии« дракон »с несколькими МВт волны», в материалах Международного симпозиума IEEE по промышленной электронике (ISIE ’07), стр. 2685-2690, Виго, Испания, 2007.
[26] Дж. С. Ким и С. К. Суи, «Новая схема управления преобразователем постоянного тока в переменный без электролитического конденсатора звена постоянного тока», в Трудах 24-й ежегодной конференции специалистов по силовой электронике IEEE (PESC ’93), стр.300-306, 1993.
[27] Дж. Родригес, Дж. Понт, П. Корреа, П. Лезана и П. Кортес, «Прогнозируемое управление мощностью преобразователя AC / DC / AC», в материалах 40-й ежегодной конференции IEEE Industry Applications Conference. (IAS ’05), стр. 934-939, Гонконг, Китай, октябрь 2005 г.
[28] М. Х. Рашид, Справочник по силовой электронике, Academic Press, New York, NY, USA, 2001.
[29] С. Йонгсуг, В. Тиджерас и Т.А. Липо, «Метод управления в синхронной кадре dq для повышающего выпрямителя с ШИМ в обобщенных несбалансированных условиях работы», в материалах 33-й ежегодной конференции специалистов по силовой электронике IEEE (PESC ’02 ), т.3, стр. 1425-1430, Квинсленд, Австралия, 2002.
[30] К. С. Лоу, М. Ф. Рахман и К. В. Лим, «Преобразование dq и линеаризация с обратной связью синхронного двигателя с постоянными магнитами», в Proceedings of the 1995 International Conference on Power Electronics and Drive Systems, vol. 1. С. 292-296, Сингапур, 1995.
.
[31] Л. И-Куэй, «Коэффициент корреляции согласованности для оценки воспроизводимости», Биометрия, т. 45, нет. 1. С. 255-268, 1989.
Авторское право International Journal of Vehicular Technology является собственностью Hindawi Publishing Corporation, и его содержимое не может быть скопировано или отправлено по электронной почте на несколько сайтов или размещено в рассылке без явного письменного разрешения правообладателя. Однако пользователи могут распечатывать, загружать или отправлять по электронной почте статьи для индивидуального использования.
SkyRC D100 V2 Зарядное устройство / разрядник / источник питания с двойной балансировкой переменного / постоянного тока — импульсная батарея
Описание:
SkyRC D100 v2 — это двухканальное зарядное устройство переменного / постоянного тока, которое может заряжать батареи различного химического состава (LiPo / LiHV / LiFe / Lilon / NiMH / NiCd / PB).Хотите заряжать аккумуляторы 2S LiPo и 6S LiHv одновременно? Нет проблем, два канала дают вам необходимую гибкость. Внутренний блок питания мощностью 100 Вт может использоваться даже для внешнего выхода постоянного тока мощностью до 100 Вт для питания другого оборудования. Если у вас есть внешний источник постоянного тока, зарядное устройство становится еще более мощным, позволяя заряжать до 200 Вт (100 Вт на порт).
В дополнение ко всей этой гибкости SkyRC продолжил упаковывать столько функций, сколько было возможно, включая некоторые инновационные новые функции.Благодаря функции голосовых подсказок даже новичок может с уверенностью использовать это зарядное устройство, так как зарядное устройство расскажет вам о процессе. Еще одна выдающаяся новая функция — это функция «SCAN TO GO», которая позволяет пользователю назначать QR-код, который содержит все соответствующие данные для вашей батареи, которую вы заряжаете или разряжаете.
Все, что вам нужно сделать, это создать уникальный QR-код с помощью приложения «SkyCharger», распечатать его и вставить на аккумулятор. Теперь вся важная информация хранится в QR-коде, и все, что вам нужно сделать, это нажать кнопку сканирования, и процесс зарядки или разрядки начнется автоматически! Приложение также позволяет удаленно управлять и контролировать D100 v2.А для любителей информации теперь вы можете отслеживать напряжение батареи, напряжение элементов и другие данные во время зарядки с помощью графиков в реальном времени.
Характеристики:
Голосовое руководство
Позволяет сделать зарядное устройство более удобным и настраиваемым. В левую часть зарядного устройства включен динамик, поддерживающий отдельно английский и китайский языки, что позволяет сократить время неправильной работы.
Распределение питания
Зарядное устройство поддерживает распределение мощности между каналом A / каналом B и блоком питания при общей мощности 100 Вт в режиме переменного тока.
Scan To Go
Уникальная функция, облегчающая установку зарядного устройства. Позволяет пользователям назначать QR-код, который содержит все необходимые данные для аккумулятора для зарядки или разрядки.
Пользователи могут создать уникальный QR-код с помощью приложения «SkyCharger». Распечатайте и вставьте в аккумулятор. С помощью смартфона запустите приложение «SkyCharger». Поскольку вся важная информация хранится в QR-коде, вам нужно просто нажать кнопку сканирования, и процесс зарядки или разрядки начнется автоматически.
Источник питания постоянного тока
Возможность подачи питания 100 Вт / 13,8 В постоянного тока значительно расширяет область его использования, что действительно является отличным партнером для любителей питания оборудования постоянного тока.
Двухканальное зарядное устройство
SKYRC D100 V2 позволяет одновременно подключать 2 батареи к одному зарядному устройству, и оно будет автоматически заряжать 2 батареи одновременно.
Соединение Bluetooth
Соединение Bluetooth 4.0 позволяет пользователю дистанционно управлять и контролировать D100 V2 с помощью приложения на портативном устройстве, таком как смартфон.Явное сопряжение не требуется; После загрузки и установки приложения просто активируйте Bluetooth на своем мобильном устройстве и запустите приложение. D100 V2, и ваше устройство автоматически установит соединение Bluetooth.
Charge Master
Пользователь может контролировать напряжение батареи, напряжение элементов и другие данные во время зарядки, просматривать данные о заряде в виде графиков в реальном времени, а также может управлять зарядкой и обновлять прошивку из «Charge Master».
Технические характеристики:
Входное напряжение переменного тока: 100 — 240 В
Входное напряжение постоянного тока: 11 — 18 В
Зарядная мощность: AC: 100 Вт (поддержка распределения мощности) / постоянный ток: 2 x 100 Вт
Мощность разряда: 2 x 10 Вт
Ток заряда: (0.1 — 10,0 A) x 2
Ток разряда: (0,1 — 2,0 A) x 2
Выход источника питания постоянного тока: 13,8 В / макс. 100 Вт
Потребление тока для порта балансировки: 300 мА / элемент
Ток непрерывной зарядки: 50 — 300 мА и выключено
LiPo / LiFe / Lilon / LiHV Количество ячеек батареи: 1 — 6S
NiMH / NiCd Количество ячеек батареи: 1 — 15S
Pb Напряжение батареи: 2 — 20 В
Размер:
Длина : 140 мм
Ширина : 153 мм
Высота : 67 мм
Включает:
- SKYRC D100V2 Зарядное устройство с двойной балансировкой и постоянным током Разрядник Блок питания Американская вилка (1 шт.)
- Шнур питания переменного тока (1 шт.)
- Адаптер XH (1 шт.)
- Разъемы типа «банан» с разъемом XT60 Зарядный кабель (1 шт.)
- Зарядный кабель (1 шт.)
- Руководство по эксплуатации (1 шт.)
% PDF-1.3
%
2390 0 объект
>
endobj
xref
2390 80
0000000016 00000 н.
0000004015 00000 н.
0000004185 00000 п.
0000004318 00000 н.
0000004379 00000 п.
0000004546 00000 н.
0000004748 00000 н.
0000005757 00000 н.
0000006762 00000 н.
0000007402 00000 н.
0000007441 00000 п.
0000007545 00000 н.
0000007738 00000 п.
0000007931 00000 п.
0000008125 00000 н.
0000010043 00000 п.
0000010488 00000 п.
0000010675 00000 п.
0000011369 00000 п.
0000012006 00000 п.
0000012175 00000 п.
0000012309 00000 п.
0000024073 00000 п.
0000024263 00000 п.
0000024592 00000 п.
0000024783 00000 п.
0000024852 00000 п.
0000037055 00000 п.
0000037245 00000 п.
0000037535 00000 п.
0000038175 00000 п.
0000038367 00000 п.
0000041062 00000 п.
0000052130 00000 п.
0000063232 00000 п.
0000075513 00000 п.
0000081122 00000 п.
0000091582 00000 п.
0000101947 00000 н.
0000102008 00000 н.
0000102128 00000 н.
0000102205 00000 н.
0000102263 00000 н.
0000102359 00000 п.
0000102419 00000 н.
0000102515 00000 н.
0000102560 00000 н.
0000102656 00000 п.
0000102716 00000 н.
0000102812 00000 н.
0000102870 00000 н.
0000102966 00000 н.
0000103024 00000 н.
0000103120 00000 н.
0000103178 00000 п.
0000103312 00000 н.
0000103370 00000 п.
0000103459 00000 н.
0000103552 00000 п.
0000103648 00000 н.
0000103706 00000 н.
0000103802 00000 п.
0000103860 00000 н.
0000103956 00000 н.
0000104013 00000 н.
0000104147 00000 н.
0000104204 00000 н.
0000104298 00000 п.
0000104386 00000 п.
0000104443 00000 н.
0000104540 00000 н.
0000104597 00000 п.
0000104654 00000 п.
0000104712 00000 н.
0000104770 00000 н.
0000104829 00000 н.
0000104926 00000 н.
0000105023 00000 н.
0000105079 00000 п.
0000001896 00000 н.
трейлер
] / Назад 4748967 >>
startxref
0
%% EOF
2469 0 объект
> поток
hW {TS ݛ {«» GC ـ
Журнал силовой электроники (JPE)
Цифровое управление преобразователем переменного тока в постоянный с использованием метода управления балансом мощности с измерением среднего выходного напряжения
Vol.12, No. 1, pp. 88-97,
Январь 2012 г.
10.6113 / JPE.2012.12.1.88
Аннотация
В данной статье представлен метод цифрового управления преобразователем постоянного / переменного тока с высоким коэффициентом мощности с использованием баланса мощности.
метод управления для достижения быстрого отклика управления выходным напряжением.Чтобы избежать воздействия пульсаций выходного напряжения в
В контуре управления напряжением производится выборка среднего выходного напряжения, которая используется в качестве сигнала обратной связи для контроллера выходного напряжения.
Предлагаемый метод управления был проверен моделированием с использованием MATLAB / Simulink, и его реализация была реализована
цифровой сигнальный процессор dsPIC30F4011 для управления преобразователем AC / DC топологии CUK с выходным напряжением 48 В и мощностью 250 Вт
выходная мощность. Результаты экспериментов согласуются с результатами моделирования.Предлагаемый способ управления позволяет достичь быстрого переходного процесса.
отклик с более низкими искажениями линейного тока, чем достигается при использовании обычного пропорционально-интегрального регулятора и
техника управления балансом мощности с помощью обычного метода выборки.
Статистика
Показать / скрыть статистику
Накопительное количество с 30 сентября 2019 г.
Несколько запросов в одном сеансе браузера считаются одним просмотром.Если навести указатель мыши на диаграмму, будут показаны значения точек данных.
Цитируйте эту статью
[стиль IEEE]
П. Висутметхикорн и В. Чанкаг, «Цифровое управление преобразователем переменного тока в постоянный с использованием метода управления балансом мощности с измерением среднего выходного напряжения», Journal of Power Electronics, vol.12, вып. 1. С. 88-97, 2012. DOI: 10.6113 / JPE.2012.12.1.88.
[Стиль ACM]
Писит Висутметхикорн и Вибун Чанкаг. 2012. Цифровое управление преобразователем переменного тока в постоянный с использованием метода управления балансом мощности с измерением среднего выходного напряжения. Журнал силовой электроники , 12, 1, (2012), 88-97. DOI: 10.6113 / JPE.2012.12.1.88.
режимов балансировки мощности и динамический поток мощности в сети в солнечных фотоэлектрических и аккумуляторных батареях Экспериментальная микросеть постоянного тока, IEEE Access
В этой статье предлагается система управления энергией, основанная на различных режимах баланса мощности и динамическом потоке электроэнергии в сети, для работы в микросети звена постоянного тока на основе солнечного фотоэлектрического генератора и аккумуляторного накопителя, с возможностью запрашивать переменную мощность из сети. для удовлетворения спроса на нагрузку.Управление энергопотреблением предоставляет необходимые справочные данные для каждого режима в зависимости от доступности солнечного источника, состояния батареи, потерь мощности и тарифа сети. Система нечеткой логики разработана для обеспечения динамического потока электроэнергии в сети на основе цены сети. Восемь режимов баланса мощности определены на основе выработки, хранения и доступности электроэнергии для удовлетворения спроса на нагрузку. Целью является минимизация затрат на электроэнергию и увеличение срока службы запоминающего устройства. Микросеть контролируется для поддержания постоянного напряжения в промежуточном контуре и регулирования тока батареи в зависимости от режима работы.Предлагаемая система управления энергопотреблением, основанная на режимах баланса мощности, экспериментально проверена на лабораторной микросети постоянного тока для различных условий. Результаты экспериментов показали удовлетворительную работу микросети и плавные переходы между различными режимами баланса мощности.
中文 翻译 :
光伏 和 电池 存储 实验 DC-Link 微 电网 中 的 功率 平衡 模式 和 动态 电网 功率 流
本文 提出 了 基于 不同 功率 平衡 模式 和 功率 流 的 能源 管理 系统 , 系统 太阳能 光伏 发电机 和 电池 的 直流 链路 微 电网 , 并 可以 电网 可变满足 负载 需求。 能源 管理 根据 太阳能 的 可用性 , 电池 状态 , 功率 损耗 和 电网 计费 率 , 每种 模式 提供 所需 的 参考。 开发 系统 , 以 电网 电网 潮流 根据发电 量 , 存储 量 和 电网 承受 能力 定义 八种 功率 平衡 模式 , 以 满足 负载 需求。 目的 是 使 能量 成本 最小 化 并 的 寿命。 控制电池 电流。 所 提出 的 能量 管理 系统 基于 功率 模式 , 已 在 实验室 规模 的 DC-link 微 电 网上 针对 不同 条件 进行 结果 显示 的平衡 模式 之间 的 平滑 过渡。
.