
Автоматическое управление — Статьи — Горная энциклопедия
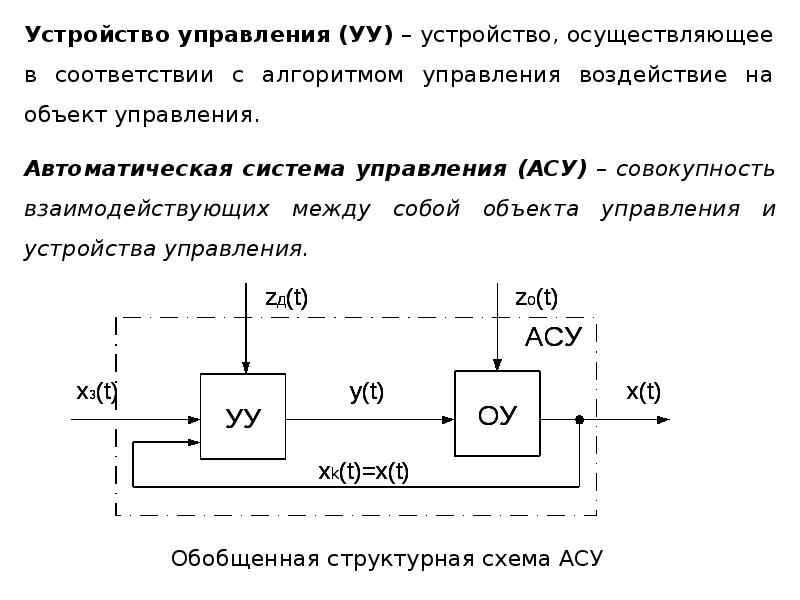
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ (а. automatic соntrol, automatic management; н. automatische Steuerung; ф. соmmande automatique, gestion automatique; и. соntrol automatiсо) — процесс управления объектом, при котором операции, обеспечивающие достижение заданной цели, выполняются системой, функционирующей без вмешательства человека в соответствии с заранее заданным алгоритмом.
Автоматическое управление реализуется в системах автоматического управления (САУ) — совокупности автоматического управляющего устройства и управляемого объекта. САУ подразделяется на системы: автоматического регулирования (CAP), в задачу которых входит поддержание постоянного значения управляемой величины, программного управления, где управляемая величина изменяется по заданной программе, следящие, для которых программа управления заранее не известна и характер поведения системы полностью зависит от изменения условий функционирования объекта управления, адаптационные, или самоприспосабливающиеся.
По мере совершенствования технических средств и методов автоматического управления автоматизируются большинство или все операции как единый комплекс (комплексная и полная автоматизация). Переход к комплексной автоматизации и более сложным алгоритмам связан, как правило, с использованием ЭВМ и созданием автоматизированных систем управления (АСУ).
Автоматическое управление применяется практически на всех горных предприятиях. На шахтах внедрена комплексная автоматизация подземной добычи угля, основанная на широком использовании автоматизированных проходческих комбайнов и конвейерных линий, автоматических вентиляционных и водоотливных установок и других механизмов. На некоторых шахтах автоматизирована практически вся технологическая линия забой — подъём (например, на шахте «Прогресс» ПО «Новомосковскуголь» и шахте «Октябрьская» ПО «Донецкуголь»). Практически все компрессорные и насосные станции газо- и нефтепроводов функционируют в автоматическом режиме.
На нефтепромыслах, кроме того, используются: групповые измерительные установки, которые автоматически переключают скважины и осуществляют измерения, контролируют состояние скважин и обеспечивают их блокировку при аварийных ситуациях; автоматизированные сепарационные установки, в которых происходит разделение нефти и воды; установки для автоматического учёта и сдачи товарной нефти и другое оборудование. На обогатительных фабриках процессы дробления, измельчения, сортировки, обезвоживания и другие объединяются в единый непрерывный поток с автоматическим управлением и контролем.
На обогатительных фабриках процессы дробления, измельчения, сортировки, обезвоживания и другие объединяются в единый непрерывный поток с автоматическим управлением и контролем.
Автоматическое управление и регулирование
В этой статье ЭлектроВести расскажут вам, что такое автоматическое управление и регулирование.
В современном мире очень трудно найти технологический процесс, который не был бы автоматизирован. Автоматизация любого технологического процесса подразумевает его контроль, управление, регулирование, сигнализацию, защиту и блокировку. В этой статье рассмотрим основы автоматического управления и регулирования.
В окружающем нас мире повсюду протекают различные процессы управления. В управлении нуждается всё: физический или химический процесс, отдельная технологическая установка, производство в целом, промышленность и так далее. Даже общественные отношения. Управление на сегодняшний день является самым сложным видом человеческой деятельности.
Нет такой отрасли промышленности, где бы не применялись системы автоматического регулирования и управления. Эти системы разнообразны и по характеру решаемых ими задач и по исполнению.
Автоматическое регулирование
Регулирование – это поддержание постоянным значения некоторой заданной величины, характеризующей процесс, или изменение его по заданному закону, осуществляемое с помощью изменения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта.
Автоматического системы регулирования (АСУ) предназначаются для автоматического поддержания заданного режима технологического процесса или изменения его во времени по заранее заданному или задаваемому в зависимости от каких-то условий закону. При этом имеется в виду, что внешние условия нарушают заданный закон протекания процесса, а система автоматического регулирования стремится его выполнить, преодолевая влияние внешних факторов.
Под объектом регулирования понимают аппарат (станок, машину), в котором один или несколько физических параметров должны изменяться по заданным законам при любых возможных внешних условиях. Объектом регулирования могут быть:
- нагревательная печь, в которой температура должна оставаться постоянной или изменяться по заданному закону;
- бак, в котором должен поддерживаться заданный уровень жидкости при изменениях ее расхода из бака;
- электрический двигатель, скорость которого должна оставаться постоянной при изменениях момента сопротивления.
Физические величины, закон изменения которых осуществляется автоматическим устройством, называются регулируемыми величинами. Устройство, автоматически поддерживающее заданный закон изменения регулируемой величины, называется автоматическим регулятором.
Заданный закон изменения регулируемой величины вырабатывается специальным задающим устройством (задатчиком).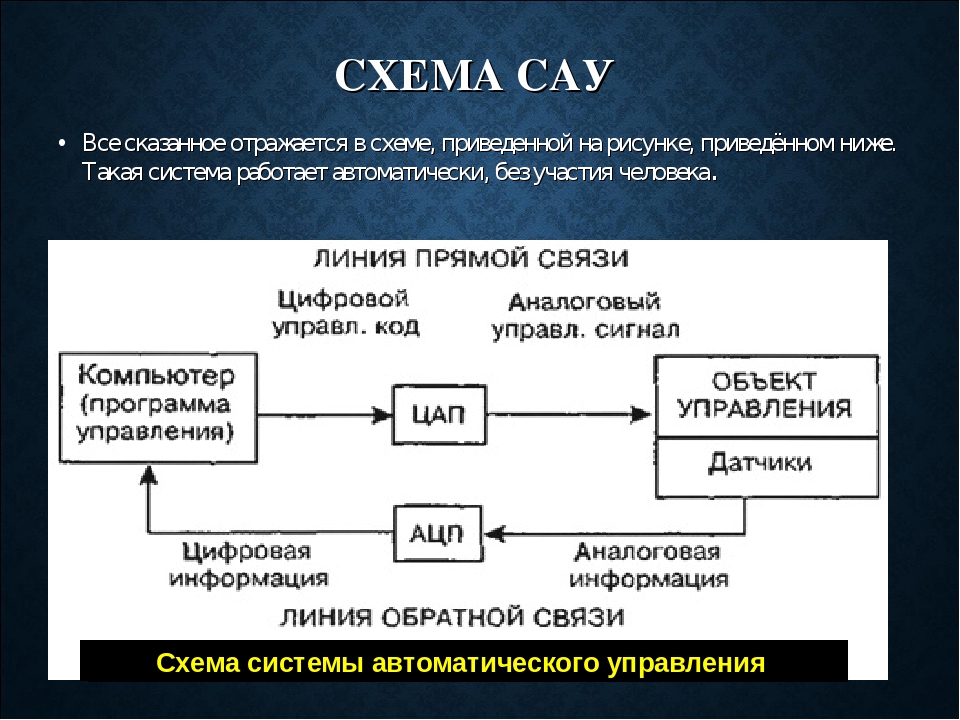 Воздействие задатчика на регулятор называется задающим воздействием.
Воздействие задатчика на регулятор называется задающим воздействием.
Автоматический регулятор постоянно сравнивает текущее значение регулируемой величины с заданным (уставкой) и при наличии рассогласования вырабатывает регулирующее воздействие. Если регулируемая величина отклоняется от заданного значения, управляющий орган воздействует на исполнительный механизм так, чтобы рассогласование между заданным и действительным протеканием процесса было ликвидировано. Человек в эту систему непосредственно вмешаться не может, возможно только косвенное участие – посредством изменения уставки.
Нарушение заданного закона протекания технологического процесса происходит в основном из-за внешних воздействий на объект, которые называют возмущающими воздействиями. К ним относятся изменения момента сопротивления на валу двигателя, расхода воды из бака, качества топлива или массы нагреваемых изделий в печи и т. д.
Чаще всего устройства автоматического регулирования — системы замкнутые (управление по отклонению). Сигнал, появившись в любой точке замкнутого контура, проходит все звенья системы и возвращается в место своего возникновения (в преобразованном виде). Но бывают и разомкнутые системы (управление по возмущению).
Сигнал, появившись в любой точке замкнутого контура, проходит все звенья системы и возвращается в место своего возникновения (в преобразованном виде). Но бывают и разомкнутые системы (управление по возмущению).
В результате этого в системах регулирования могут возникать колебания, в том числе колебания регулируемой величины. Если колебания возрастают, система называется неустойчивой и является неработоспособной. Поэтому первое требование к системам автоматического регулирования — обеспечение устойчивости регулирования, т. е. обеспечение затухания колебаний, возникающих в системе.
Необходимо также, чтобы выведенная из состояния равновесия возмущающими воздействиями система регулирования вернулась к заданному положению равновесия возможно точнее и возможно быстрее. Пути построения систем, отвечающих перечисленным требованиям, определяет теория автоматического регулирования.
Системы автоматического регулирования делятся по характеру задающего воздействия. Когда регулируемая величина должна быть постоянна, то систему называют системой автоматической стабилизации (или просто системой регулирования). Сюда относятся системы сохранения уровня воды в баке, скорости вращения двигателя и др.
Когда регулируемая величина должна быть постоянна, то систему называют системой автоматической стабилизации (или просто системой регулирования). Сюда относятся системы сохранения уровня воды в баке, скорости вращения двигателя и др.
Если регулируемая величина изменяется и заранее известен закон (программа) изменения задающего воздействия, система называется системой программного регулирования. Она может, например, осуществлять автоматическое изменение температуры в печи по заранее заданной программе.
Если регулируемая величина изменяется, но заранее не известен закон изменения задающего воздействия, систему регулирования называют следящей системой. К следящим системам в известном смысле можно отнести автоматические потенциометры и мосты.
В автоматическом потенциометре реверсивный двигатель через ползунок реохорда воздействует на измерительный мост так, чтобы напряжение на выходе позднего изменялось соответственно всем изменениям термо-э. д. с. Очевидно, что термо-э. д. с. изменяется по закону, неизвестному заранее, иначе не нужен был бы сам измерительный прибор.
д. с. Очевидно, что термо-э. д. с. изменяется по закону, неизвестному заранее, иначе не нужен был бы сам измерительный прибор.
Характер воздействия регулирующего органа на объект бывает непрерывным и прерывистым. Последнее происходит, когда в системе регулирования применяются реле или специальные импульсные устройства.
Простейшими регуляторами прерывистого действия являются двухпозиционные регуляторы. Такое название они получили потому, что их регулирующий орган может занимать только два положения (позиции). Очень часто эти позиции соответствуют максимальной и минимальной подаче сырья или энергии в объект.
При так называемом трехпозиционном регулировании регулирующий орган может занижать три положения, соответствующие трем значениям регулируемой величины: «мало», «норма», «больше».
Для регулирования непрерывных процессов наиболее часто используют физические или программные ПИД-регуляторы.
Автоматическое управление
Управление – это процесс выработки управляющих воздействий по переводу объекта управления в желаемое состояние.
Более полное определение: это осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления. Эти последние слова в данной ситуации являются ключевыми.
Система автоматического управления отличается от системы автоматического регулирования тем, что при одних и тех же значениях входных величин, т.е. при одной и той же исходной информации воздействие, которое вырабатывает система может быть различно в зависимости от того, какая цель или какой критерий управления в нее заложен.
Назначение систем автоматического управления — исключить участие человека в управлении технологическим процессом. Функции человека сводятся к осуществлению пускового импульса. Все остальные операции по управлению процессом, по изменению режимов работы производятся автоматическим устройством.
Устройства автоматического управления воздействуют на исполнительные механизмы, приводы рабочих агрегатов, которые изменяют подачу сырья, энергии в аппараты, производят перемещения обрабатываемых изделий и т. д.
д.
При автоматическом управлении автоматическое устройство обеспечивает необходимую последовательность, начало и окончание отдельных операций, составляющих рабочий процесс. Подача командного импульса на управляющий орган осуществляется человеком. Управляющий орган воздействует на исполнительный механизм, который подает сырье или энергию в аппарат или производит определенную серию механических перемещений, операций, поддерживая тем самым заданный режим работы установки.
Автоматизированная система управления (АСУ) – совокупность математических методов, технических и программных средств, организационных комплексов, а также управленческого и обслуживающего персонала, которые совместно осуществляют рациональное управление объектом управления в соответствии с поставленной целью.
Эта система обычно содержит большое количество датчиков, позволяющих измерять различные параметры, большое количество исполнительных устройств, причем их количество необязательно должно совпадать с количеством датчиков.
Основным элементом этой системы является управляющее устройство (контроллер), в который заложена программа обработки, информации получаемой с датчиков и критерий управления, исходя из которого система управления и вырабатывает различные управляющие воздействия. При одном и том же значении контролируемых параметров управляющее воздействие в данном случае может быть различным.
Системы автоматического регулирования наиболее старые системы автоматизации. Они начали использоваться с середины XIX века (использование автоматических регуляторов в паровых машинах, в железнодорожной автоматике, в электроэнергетике). В 30-е — 60-е годы XX все системы автоматизации (автоматические станки, линии, участки) строились с использованием релейных схем в комбинации с локальными аналоговыми регуляторами с использованием электронных элементов.
В то время электрические реле являлись наиболее распространенными элементами электроавтоматики. Они применялсь во всех схемах автоматического контроля, защиты, управления и регулирования.
Основная особенность реле — возможность управления достаточно большими мощностями в исполнительных механизмах с помощью незначительных управляющих сигналов от датчиков. Коэффициент усиления реле по мощности может достигать значений десятков тысяч.
По мере того, как технологические процессы усложнялись, количество регуляторов на объектах автоматизации росло и системы становились очень громоздкими и тяжелыми в обслуживании, поэтому после появления компьютерных систем управления (микроконтроллеры, микропроцессоры, программируемые логические контроллеры) системы автоматического регулирования стали замещаться системами автоматического управления.
Ранее ЭлектроВести писали, что проект Закона Украины «О предотвращении, уменьшении и контроле промышленного загрязнения», который направлен на реформирование разрешительной системы в сфере охраны окружающей среды, зарегистрирован в Верховной Раде Украины.
По материалам: electrik.info.
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПЛОСКОШЛИФОВАЛЬНЫМ СТАНКОМ
В решении задачи ускорения социально-экономического развития промышленных предприятий страны, на базе научно-технического прогресса главенствующая роль принадлежит машиностроению, продукция которого должна обеспечить многократное увеличение производительности труда во всех областях производственной деятельности человека при автоматизации всех ее стадий.
Сегодня мы коснемся темы автоматизации станков, систем автоматического управления на примере успешно реализованного специалистами нашей компании проекта по разработке и внедрению системы автоматического управления плоскошлифовальным станком.
Эксплуатационные качества станка (производительность, удобство и простота обслуживания, надежность работы) во многом зависят от того, как удачно разработана система управления. В системах управления станком применяют механические, электрические, электронные, гидравлические и пневматические устройства, а также их комбинации. У станков с программным управлением цикл работы станка осуществляется по определенному закону посредством сменного элемента или элемента, задающего этот закон.
К системам управления предъявляют требования безопасности, легкости и удобства манипулирования, быстроты, точности (для различных механизмов станка требуется разная точность перемещений), автоматизации. Число органов управления станком можно значительно сократить путем сообщения, например, одной рукоятке или маховику функций управления несколькими различными или однотипными механизмами.
Управление станком можно представить как процесс воздействия на него для обеспечения выполнения требуемого техно логического процесса обработки детали с заданной точностью, производительностью и себе стоимостью обработки. Это воздействие может осуществляться человеком с помощью органов ручного управления станком или системой автоматического управления циклом станка без участия человека.
При управлении станком вручную рабочий преобразует информацию чертежа детали в определенные движения рук, осуществляя управление циклом работы станка и перемещениями его рабочих органов. При этом рабочий использует свой опыт и знания о методах обработки, последовательности выполнения технологических переходов, применяемых режимах обработки, возможностях и особенностях конструкции станка, режущих инструментов и пр. При ручном управлении станком обеспечивается большая универсальность и высокая мобильность.
Действительно, любое изменение чертежа детали может быть учтено рабочим при управлении станком: очень быстро и без больших затрат производится переход на обработку других деталей. Однако управление станком вручную значительно ограничивает возможности повышения производительности обработки, а во многих случаях — снижает или делает нестабильной точность обрабатываемых деталей.
Однако управление станком вручную значительно ограничивает возможности повышения производительности обработки, а во многих случаях — снижает или делает нестабильной точность обрабатываемых деталей.
Автоматическое управление станком производится по программе, заранее разработанной на основе принятого технологического процесса обработки. Программа — это способ достижения цели с однозначным описанием процедуры его выполнения. Элемент или комплекс элементов, несущих на себе программу управления, называют программоносителем.
Система автоматического управления (САУ) представляет собой комплекс устройств и средств связи, обеспечивающий точное и согласованное во времени взаимодействие исполнительных механизмов станка в соответствии с программой управления.
Различают САУ разомкнутые или без обратной связи и замкнутые или с обратной связью.
В первом случае заданный цикл осуществляется с требуемой последовательностью без контроля системой правильности его осуществления (рис. 1).
1).
Во втором — при помощи специальных устройств сравнивается действительное положение рабочего органа станка с требуемым, определяемым программой, и появляющееся рассогласование ликвидируется (рис. 2).
Здесь, таким образом, имеетсядва потока информации, а неодин, как в первом случае.
САУ в зависимости от числа потоков информации и вида программоносителей можно разделить на несколько групп (рис. 3).
Следующим шагом в автоматизации процессов обработки является применение самоприспособляющихся систем управления (СПСУ).
В СПСУ обеспечивается три потока информации, два — как в САУ замкнутого типа и третий — через логические устройства или адаптивные блоки (рис. 4).
Автоматическое управление процессами резания
В учебном пособии представлены основы автоматического управления различными процессами резания, современные подходы к управлению резанием в САМ-системах, новые модули таких систем, автоматически формирующие управляющие программы для токарной и фрезерной обработки на станках с ЧПУ, рассмотрены методы управления, основанные на использовании априорной, текущей, апостериорной информации и их комбинаций, даны обобщённая модель процесса резания и методы моделирования для проектирования управляющих программ, изложены новые подходы к исследованию динамических явлений, технологической наследственности формы заготовки, описаны особенности управления процессами резания с высокими скоростями формообразования, уделено внимание управлению процессами абразивной обработки.
В книгу включены 8 компьютерных практикумов и 25 прикладных интерактивных программ, поясняющих и иллюстрирующих теоретический материал. Поэтому издание должно использоваться вместе с QR-кодом, что делает его интерактивным, благодаря прикладным программам, моделирующим разнообразные объекты, процессы механической обработки, а также проектирующие оптимальные законы управления.
Предназначено для студентов вузов, обучающихся по направлению «Конструкторско-технологическое обеспечение машиностроительных производств».
| Общие | |
| ISBN: | 978-5-94178-285-7 |
| Автор | Петраков Ю.В., Драчев О.И. |
| Вид издания | Учебное пособие (Гриф) |
| Переплет/Обложка | Пер. |
| Год издания | 2020 |
| Страниц | 408 |
Ручное и автоматическое управление воротами: плюсы и минусы
Промышленные ворота имеют ручное или автоматическое управление. Детально рассмотрим каждый из вариантов.
Ручное управление
В ворота устанавливается торсионный пружинный механизм. С его помощью происходит компенсация веса полотна. Люди могут производить открывание и закрывание створок самостоятельно. На внутренней стороне располагается ручка для удобного закрывания полотна.
Ручка для открытия ворот
Альтернативным вариантом ручного управления является применение специального блока. Веревка позволяет опускать и поднимать створки. Ее перекидывают через блок и крепят внизу. Данную модель используют, если высота ворот больше 2 м, а площадь не превышает 15 кв. м.
м.
Цепной редуктор служит в качестве элемента, упрощающего движение створок. Он имеет передаточное отношение 1:4. Это облегчает открытие ворот. Ключевым компонентом является стальная цепь, которая приводит механизм редуктора в движение.
Ручной вариант управления полезен для подъема створок в аварийном режиме, когда автоматика отключена.
Автоматическое управление
Ворота, оборудованные автоматикой, отличаются комфортом и простотой управления. Дежурному не требуется выходить из будки и вручную открывать ворота. Это очень удобно в дождливую и снежную погоду. Можно открывать и закрывать ворота с большого расстояния.
Пульт управления воротами
Автоматизация промышленных преград приносит существенную экономическую выгоду. Вам не нужно тратить время на открытие ворот.
Пульт управления может находиться в транспортном средстве или в помещении. Движение полотна происходит за счет электропривода. В зависимости от мощности, принципа работы и функций выделяются следующие типы приводов:
Движение полотна происходит за счет электропривода. В зависимости от мощности, принципа работы и функций выделяются следующие типы приводов:
- Потолочные. Предназначены для установки на воротах, которые крепятся в гаражах. Для установки системы привода рейку фиксируют под потолком. Управлять можно через цепь или ремень в приводной рейке. Потолочные системы подходят для ворот с небольшой площадью и высотой;
- Осевые. Крепятся на системах промышленного назначения. Привод располагается на валу ворот. Он вращает вал, отрывая или закрывая ворота. Осевые приводы монтируют на воротах большой высоты и площади.
- Пульты-передатчики;
- Выносные кнопки;
- Замковые выключатели;
- Панели управления.
Выбор конкретного варианта зависит от желания заказчика и основных условий эксплуатации ворот. Расширить возможности конструкции ворот позволяют сигнальные лампы, фотоэлементы, оптосенсоры, пульт ДУ, светофоры и индукционные петли.
Ручные или автоматические
Ручной тип ворот более экономный, не требует установки электроприводов, дополнительного монтажа автоматической системы и пульта управления. Автоматические же системы позволяют сэкономить время. Сам электропривод стоит недорого, но изготовление конкретного типа ворот обсуждается индивидуально.
Мы изготавливаем промышленные ворота с ручным и автоматическим управлением. Дополнительно оказываем услуги монтажа промышленных ворот и обслуживания готовой конструкции ворот. Услуга проектирования предоставляется бесплатно.
3D системы управления техникой, автоматическое управление машинами, система нивелировки
Системы управления Тримбл для дорожно-строительной и землеройной техники – один из наиболее востребованных продуктов на рынке спутниковых систем позицианирования. Автоматическое управление машинами на строительных площадках позволяет значительно повысить производительность спецтехники, автоматизировать работу машин, увеличить скорость и точность работ, что ведет к снижению финансовых, временных и трудовых затрат.
Разделение систем управления по принципу функционирования:
- 3D системы, работающие с помощью GPS/ГЛОНАСС технологии;
- 2D лазерные;
- 2D ультразвуковые.
ЗD системы управления
Эти системы автоматического управления практически самостоятельно руководят рабочим органом строительной машины, используя в качестве исходных данных загруженную цифровую модель проекта. В этом отличие 3D систем управления от 2D, в которых параметры вводятся вручную. Возможности системы позволяют создавать отчет о выполненной работе и отправлять его на удаленный сервер.
Основные компоненты 3D систем автоматического управления:
- система, позиционирующая положение рабочего органа машины;
- бортовой компьютер (панель управления), находящийся в кабине;
- программное обеспечение для преобразования цифровых проектов в формат, необходимый для корректной работы системы.
Системы управления 2D состоят из двух лазерных приемников либо одного приемника и датчика поперечного уклона. Дополнительно в комплект может входить датчик контроля высоты отвала.
Дополнительно в комплект может входить датчик контроля высоты отвала.
Лазерные системы нивелировки
Стабильным спросом пользуются лазерные системы нивелировки. Лазерное оборудование Тримбл при оптимальной стоимости достаточно универсально и подходит для использования практически с любым видом строительной техники. Такая система нивелировки проста и удобна в эксплуатации, и позволяет достичь высокой точности производимых работ с минимальными погрешностями.
Автоматическая нивелировка дает множество преимуществ перед традиционными способами геодезических работ:
- увеличение скорости работы спецтехники, обусловленное сокращением вынужденных простоев для периодической проверки отметок в «ручном» режиме;
- формирование более ровного земляного полотна, что приводит к существенной экономии материалов.
Преимущества автоматического управления машинами:
- Простота и удобство в установке и использовании оборудования;
- Возможность загрузки информации с удаленного сервера;
- Более точный расчет количества необходимых материалов для дорожно-строительных работ;
- Снижение расхода ГСМ для строительной техники;
- Использование данных бортового компьютера для рабочей документации;
- Уменьшение объема «ручной» работы за счет автоматизации большинства действий.

2D и 3D системы автоматического управления машинами могут устанавливаться на все основные виды строительной спецтехники: грейдеры, экскаваторы и бульдозеры, катки, асфальтоукладчики, скреперы, триммеры и дорожные фрезы. Управление оборудованием при помощи системы способствует достижению максимальной производительности без потерь точности на любых поверхностях – плоских, наклонных, криволинейных. Помимо этого, упрощается контроль качества поверхности оператором даже при высокой скорости работы.
Техника автоматического управления| SEW-EURODRIVE
Управляющая техника должна поступать из одного источника, чтобы обеспечивать стабильную работу для эффективной автоматизации. Для вас мы объединяем оптимально масштабируемое контроллерное оборудование с удобным программным обеспечением для управления движением. Наша комплексная программа управления подходит для различных функций движения: от одноосевого позиционирования и электронного кулачка до робототехники.
Что такое техника автоматического управления?
Что такое техника автоматического управления?
Что такое техника автоматического управления?
Наряду с датчиками и исполнительными элементами контроллеры являются центральным компонентом в системах автоматизации. Техника автоматического управления, или промышленные контроллеры, – это устройства, которые управляют, регулируют, контролируют, собирают данные, обмениваются данными и выполняют диагностику. В автоматике под термином „управление“ в более узком смысле понимается влияние на поток материалов или энергии с помощью контура регулирования, в котором обрабатываются различные сигналы. Результат, в свою очередь, влияет на контур регулирования, а входная величина – на управляемую выходную величину.
Краткая история промышленной революции
Важную роль техники автоматического управления в промышленном развитии подчеркивает проект Industry 4. 0 федерального правительства и промышленности Германии. Ниже вкратце представлены четыре этапа истории промышленной революции:
0 федерального правительства и промышленности Германии. Ниже вкратце представлены четыре этапа истории промышленной революции:
- Этап 1 – начало: 1784 год, с внедрением механических ткацких станков, которые особенно благодаря управлению с помощью деревянных перфокарт, а позднее благодаря управлению с помощью вращающихся лент были усовершенствованы до автоматических ткацких станков.
- Этап 2 – начало: 1870 год, с первым применением конвейеров в США (скотобойни Цинциннати), при использовании электрических приводов, которые включались и выключались с помощью соответствующих контакторных и релейных устройств управления.
- Этап 3 – начало: 1969 год, с первыми программируемыми логическими контроллерами американской компании Modicon (тип Modicon 084, изобретатель: Ричард Э. Морли). Они обозначили прорыв в промышленной электронике и информационной технике к массовому методу контроля и автоматизации производства.
- Этап 4 – Industry 4. 0. Начало: 2012 год, с разработкой и внедрением так называемых киберфизических систем (англ. cyber-physical system, CPS) для глобально связанного, оптимизированного управления международно организованным производством (интернет вещей). С 2013 года этот пошаговый переход от третьего этапа к четвертому во все большем объеме демонстрируется широкой общественности на ежегодной Ганноверской ярмарке.
 0. Начало: 2012 год, с разработкой и внедрением так называемых киберфизических систем (англ. cyber-physical system, CPS) для глобально связанного, оптимизированного управления международно организованным производством (интернет вещей). С 2013 года этот пошаговый переход от третьего этапа к четвертому во все большем объеме демонстрируется широкой общественности на ежегодной Ганноверской ярмарке.
0. Начало: 2012 год, с разработкой и внедрением так называемых киберфизических систем (англ. cyber-physical system, CPS) для глобально связанного, оптимизированного управления международно организованным производством (интернет вещей). С 2013 года этот пошаговый переход от третьего этапа к четвертому во все большем объеме демонстрируется широкой общественности на ежегодной Ганноверской ярмарке.
Какие виды техники автоматического управления существуют?
В автоматике есть много названий для контроллеров со специальными функциями, например:
ПЛК – Программируемый логический контроллер
В простейшем случае у ПЛК имеются входы и выходы, операционная система и интерфейс, через который загружается прикладная программа. Она задает, какие выходы в зависимости от входов должны переключаться. Подключение ПЛК к машине или установке осуществляется через встроенные датчики и исполнительные элементы.
При этом в качестве датчиков выступают кнопки, инкрементные энкодеры, фотоячейки, конечные выключатели и т. д. В качестве исполнительных элементов используются, например, контакторы, электромагнитные клапаны или модули управления приводом (управление движением, регулирование частоты вращения с контролируемым ускорением/замедлением, контроллеры шаговых двигателей). Состояние отображается различными устройствами индикации или визуализации.
Релейно-контактные ПЛК
В этом случае управляющая логика (программа) реализуется через соединение реле (контактные устройства управления). Конструкция базируется на реле, которые используются, как правило, для простых задач управления.
ЧПУ – числовое программное управление
ЧПУ применяется в станках (токарных, сверлильных и фрезерных). При этом двоичные числовые коды, заложенные в контроллере, являются образом создаваемой детали (отсюда название „числовое управление“). Система ЧПУ с помощью программного обеспечения преобразует эти координаты в процессы движения для обработки детали.
Система ЧПУ с помощью программного обеспечения преобразует эти координаты в процессы движения для обработки детали.
RC – Robot Control (системы управления роботом)
Эти контроллеры были разработаны специально для промышленных роботов и по логической структуре очень похожи на контроллеры ЧПУ.
Наше предложение в области техники автоматического управления
В области техники автоматического управления SEW-EURODRIVE уделяет особое внимание локальному регулированию. В зависимости от системы или машины мы объединяем масштабируемое контроллерное оборудование с удобным программным обеспечением для управления движением. При этом комплексная программа управления подходит для различных функций движения – от прямого позиционирования и электронных кулачков до роботизированных кинематических конфигураций.
Что такое контроль? | Американский совет по автоматическому контролю
Что такое автоматическое управление?
Американский совет по автоматическому управлению (AACC) способствует сотрудничеству между различными сегментами сообщества автоматического управления в Соединенных Штатах и представляет сообщество во всемирной организации Международной федерации автоматического управления (IFAC).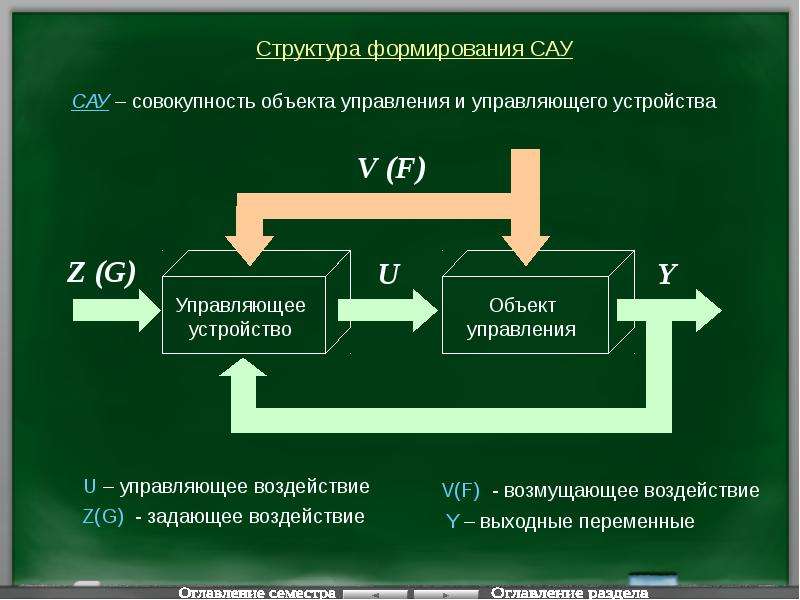 Но что такое автоматическое управление?
Но что такое автоматическое управление?
Знакомый пример — круиз-контроллер в вашем автомобиле. Вы нажимаете кнопку, и компьютерная программа следит за спидометром и автоматически регулирует положение педали акселератора, чтобы поддерживать скорость автомобиля на нужном уровне.Другой пример – автоматическая регулировка мощности нагревательного элемента по мере сушки влажного белья в сушилке для белья. Машина определяет степень сухости белья и снижает мощность нагревателя по мере завершения сушки. Это экономит энергию и предотвращает перегрев, что продлевает срок службы одежды.
Управление — это регулировка некоторой «ручки» в ответ на некоторую меру желательности. Люди делают это все время. Если вода в душе слишком холодная, мы открываем кран горячей воды, чтобы нагреть ее.Если чипсы недостаточно соленые, насыпаем на них немного соли. Если идет дождь, мы раскрываем зонт. Если есть фоновый шум, мы говорим громче.
Общей темой всего этого является то, что действие предпринимается в ответ на то, что ощущается. Это называется обратной связью, так как это происходит при взаимодействии между людьми. Автоматическое управление — это не разовая регулировка, а постоянная регулировка, чтобы поддерживать что-то в желаемом состоянии.
Это называется обратной связью, так как это происходит при взаимодействии между людьми. Автоматическое управление — это не разовая регулировка, а постоянная регулировка, чтобы поддерживать что-то в желаемом состоянии.
Контроль предпринимает действия, чтобы исправить что-то, отрегулировать что-то, чтобы что-то получилось желаемым образом.Это делают биологические существа, но когда управление осуществляется устройством, созданным людьми, когда оно осуществляется автономно машиной или компьютером, это называется автоматическим управлением. Простые механизмы обратной связи создавались людьми на протяжении тысячелетий на основе интуитивного понимания того, как ведут себя эти устройства. Только за последние 125 лет какое-то общее понимание самых разных устройств и моделей поведения слилось в то, что сейчас называется теорией управления. Теория представляет собой абстракцию, которая позволяет нам извлекать общие темы из множества примеров как природных, так и искусственных механизмов.
Большая часть автоматического управления осуществляется компьютерами, но есть четыре основных физических элемента, которые аналогичны человеческому способу действий. Одним из элементов автоматического управления является алгоритм, обычно реализуемый в виде программы на компьютере. Как и наш мозг, алгоритм определяет действие. Он диктует расчеты, которые выполняются, чтобы решить, насколько необходима корректировка. Вторым элементом является датчик. Алгоритму управления нужен датчик, чтобы наблюдать (видеть, слышать, чувствовать, считать) некоторую переменную, которая указывает на качество, называемую контролируемой переменной или CV.В круиз-контроле это значение спидометра. Человеческим аналогом сенсоров могут быть наши глаза, которые воспринимают визуальные объекты, кожные нервы, которые чувствуют прикосновение и температуру, и уши, которые воспринимают звуки. Третий элемент управления, который замыкает контур, ручка, которая регулируется с целью вызвать изменение значения CV. В круиз-контроле это педаль акселератора. Обычно это называется управляемой переменной или MV. Например, в нашем организме МК может быть мышцей. Наконец, четвертый элемент автоматического управления — это система связи, которая отправляет воспринятую информацию на компьютер, а затем передает выходные данные алгоритма конечному элементу.При автоматическом управлении системой связи может быть проводная или беспроводная сеть или двухточечное соединение, но могут использоваться гидравлические, пневматические или другие системы сигнализации. Также сигналы могут быть цифровыми (дискретными) или аналоговыми (континуальными). Человеческая параллель — это наша нервная система, которая передает сенсорные данные в мозг, а затем информацию о действиях — в мышцы.
В круиз-контроле это педаль акселератора. Обычно это называется управляемой переменной или MV. Например, в нашем организме МК может быть мышцей. Наконец, четвертый элемент автоматического управления — это система связи, которая отправляет воспринятую информацию на компьютер, а затем передает выходные данные алгоритма конечному элементу.При автоматическом управлении системой связи может быть проводная или беспроводная сеть или двухточечное соединение, но могут использоваться гидравлические, пневматические или другие системы сигнализации. Также сигналы могут быть цифровыми (дискретными) или аналоговыми (континуальными). Человеческая параллель — это наша нервная система, которая передает сенсорные данные в мозг, а затем информацию о действиях — в мышцы.
Пятый элемент также может быть включен в это обсуждение. Это не физическая вещь, но это тоже важно.Это желаемое значение CV, уставка.
Что контролируется автоматически?
Точно так же, как мышцы приспосабливают наши глаза к фокусировке на объектах, современные камеры в основном фокусируются сами, используя комбинацию небольших датчиков (для измерения расстояния), моторов (для перемещения линз) и алгоритмов, работающих на крошечных компьютерах (для принятия решений о том, как управлять двигателями на основе входных данных датчика).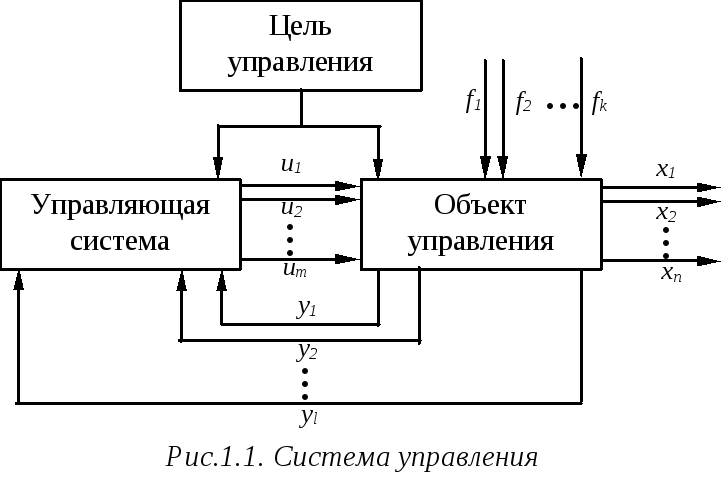 Наше тело саморегулируется на всем пути от потоотделения до регулирования общей температуры, вплоть до механизмов выработки антител и регуляции гормонов.На самом деле, многие болезни, в том числе рак и диабет, можно рассматривать как сбои в способности нашего организма к саморегуляции.
Наше тело саморегулируется на всем пути от потоотделения до регулирования общей температуры, вплоть до механизмов выработки антител и регуляции гормонов.На самом деле, многие болезни, в том числе рак и диабет, можно рассматривать как сбои в способности нашего организма к саморегуляции.
Преимущество такого преобразования вещей в том, что абстракция, теория управления, помогает нам использовать примеры из нашего инженерного мира для борьбы с болезнями и помогает нам следовать примерам природы для создания новых устройств.
Контроль вокруг нас. Когда мы путешествуем, наши мобильные телефоны должны переключаться с одной вышки на другую. Когда должно произойти переключение и на какую башню? Это решается автоматически.При пастеризации молока мы должны на короткое время нагреть его до нужной температуры, а затем снова охладить. Компьютер наблюдает за процессом и регулирует паровой и охлаждающий клапаны. Антипробуксовочная тормозная система автоматически прокачивает тормоза для улучшения сцепления с дорогой, даже если водитель держит педаль полностью нажатой. Наши радиоприемники фиксируются на частоте вещания. Наши системы отопления и кондиционирования воздуха регулируют температуру в наших жилых помещениях, даже когда двери снаружи открываются и закрываются, или когда в комнату входит больше людей.
Наши радиоприемники фиксируются на частоте вещания. Наши системы отопления и кондиционирования воздуха регулируют температуру в наших жилых помещениях, даже когда двери снаружи открываются и закрываются, или когда в комнату входит больше людей.
Контроль осуществляется в микромасштабе (внутри компьютерных микросхем) и в очень большом континентальном масштабе (регулирование национальной системы передачи электроэнергии). Бывает при бурении (глубоко под землей) или на разведывательных машинах (выход в дальний космос). Расписание поездов, полет и посадка самолета, переключение автоматической коробки передач, мощность вещания, выработка электроэнергии и чистота пищевых продуктов контролируются автоматически. Какими бы разнообразными ни были все эти примеры, в своей основе они управляются одними и теми же принципами, одной и той же абстракцией и одними и теми же пятью элементами.Вот почему AACC состоит из людей из таких разных областей. Мы можем применять контроль к самым разным устройствам, процессам, системам или процедурам; но все наше понимание обусловлено схожими аспектами цели.
Описание контура автоматического управления
Попробуйте отрегулировать температуру душа. Шаги, которые мы все предпринимаем, заключаются в том, чтобы включить воду, немного подождать, затем измерить температуру воды рукой, решить, слишком ли она горячая, слишком холодная или в самый раз, а затем внести некоторые коррективы.Мы повторяем этот процесс до тех пор, пока нас не устроит температура воды и мы не сможем принять душ. Но как только он установлен, происходят другие вещи, влияющие на наш комфорт. Например, когда трубы в нашем доме нагреваются, температура воды может немного подняться, и мы почувствуем повышение температуры и снова внесем коррективы. При автоматизации с помощью машин этот непрерывный процесс измерения, сравнения, регулировки называется автоматическим управлением.
Мы можем обобщить цикл обратной связи до чего-то общего:
.
Ввод слева является эталонным сигналом или требуемым значением уставки для процесса или системы. Если бы это описывало круиз-контроль автомобиля, эталоном была бы заданная скорость. Блок «Сравнить» обычно вычисляет разницу между измеренным значением отклика и заданным значением, то есть ошибкой срабатывания. Блок «Настройка обратной связи» решает, какое действие необходимо (вычисляет), и отправляет это решение (о правильном положении педали акселератора) на устройство «Приведение в действие» (вакуумные рычаги и меха), которое изменяет положение педали. изменять. Это действие становится входом (расходом топлива) в «Физическую систему» (двигатель и автомобиль), что приводит к изменению ее выхода (скорости).Устройство «Измерение» (спидометр) воспринимает выходные данные и сообщает значение операции «Сравнить».
В первые дни систем управления, созданных людьми, большинство этих функций выполнялись с помощью механических связей, с поплавками или эффектами центробежного ускорения, обеспечивающими восприятие. В начале 1900-х годов была изобретена первая электроника, которая предоставила гораздо больше возможностей для восприятия, приведения в действие и принятия решений. Аналоговая электроника открыла двери для всех видов систем (например,г. телефон, радио, телевидение), включая множество систем управления. Цифровые компьютеры (то, что мы сейчас называем просто компьютерами) были изобретены в конце 1940-х и начале 1950-х годов, а в конце 50-х годов их коммерческое применение для управления технологическими процессами началось. Но они были слишком медленными и громоздкими для работы систем управления в аэрокосмических приложениях. Однако по мере того, как размер цифровых компьютеров уменьшался, а их возможности росли, они начали заменять аналоговую электронику. Водоразделом для этого явления стала программа «Аполлон», в которой НАСА предпочло повторяемость и надежность компьютерного управления предыдущему аналоговому электронному управлению.
Аналоговая электроника открыла двери для всех видов систем (например,г. телефон, радио, телевидение), включая множество систем управления. Цифровые компьютеры (то, что мы сейчас называем просто компьютерами) были изобретены в конце 1940-х и начале 1950-х годов, а в конце 50-х годов их коммерческое применение для управления технологическими процессами началось. Но они были слишком медленными и громоздкими для работы систем управления в аэрокосмических приложениях. Однако по мере того, как размер цифровых компьютеров уменьшался, а их возможности росли, они начали заменять аналоговую электронику. Водоразделом для этого явления стала программа «Аполлон», в которой НАСА предпочло повторяемость и надежность компьютерного управления предыдущему аналоговому электронному управлению.
Сегодня большинство новых систем управления создаются с использованием цифровых компьютеров. Элементы измерения, сравнения и приведения в действие не исчезли, а стали более изощренными. На самом деле постоянное развитие этой технологии открыло дверь как для более сложных систем с компьютерным управлением, так и для многих, многих более простых систем с компьютерным управлением. От роботов, которые моют наши полы и косят наши газоны, до будущих беспилотных автомобилей и дронов, которые доставляют посылки к нашему порогу, достижения в области компактных компьютеров, а также недорогих сенсорных пакетов означают, что количество автономных машин, с которыми мы взаимодействуем, в день вот-вот резко подскочит.Все эти машины полагаются на контуры управления с обратной связью, чтобы обеспечить их безопасную работу, а это означает, что в основе каждой из них лежит немного теории управления.
От роботов, которые моют наши полы и косят наши газоны, до будущих беспилотных автомобилей и дронов, которые доставляют посылки к нашему порогу, достижения в области компактных компьютеров, а также недорогих сенсорных пакетов означают, что количество автономных машин, с которыми мы взаимодействуем, в день вот-вот резко подскочит.Все эти машины полагаются на контуры управления с обратной связью, чтобы обеспечить их безопасную работу, а это означает, что в основе каждой из них лежит немного теории управления.
Но не все компьютеризировано! Шариковый регулятор Уатта на паровом двигателе 150 лет назад был одним из первых примеров сложного механизма автоматического управления, и все же современные сельскохозяйственные и садовые тракторы используют аналогичные механические устройства для управления скоростью двигателя.
Зачем нужно автоматическое управление?
Автоматическая система управления никогда не делает перерывов, никогда не засыпает и часто работает намного быстрее, чем это может сделать любой человек. Компьютер может отслеживать данные от сотен датчиков, тысячи раз в секунду, и так же быстро вносить столько-то корректировок. Однако при полном внимании люди могут наблюдать только за несколькими объектами, и каждый лишь несколько раз в секунду. Автоматизация, будь то навигация в полете или автоматическое отключение сушилки, когда она определяет, что одежда высохла, избавляет человека-оператора от необходимости постоянно находиться рядом с системой. Это освобождает человека для работы на более высоком уровне, зная, что система работает сама по себе.
Компьютер может отслеживать данные от сотен датчиков, тысячи раз в секунду, и так же быстро вносить столько-то корректировок. Однако при полном внимании люди могут наблюдать только за несколькими объектами, и каждый лишь несколько раз в секунду. Автоматизация, будь то навигация в полете или автоматическое отключение сушилки, когда она определяет, что одежда высохла, избавляет человека-оператора от необходимости постоянно находиться рядом с системой. Это освобождает человека для работы на более высоком уровне, зная, что система работает сама по себе.
Какие Дисциплины контролируют?
Хотя в наши дни управление в основном осуществляется компьютерами, речь идет не только о компьютерных науках и технике управления. Автоматическое управление взаимодействует с физической системой, с реальным миром. Попытка создать контроллер без знания физической системы бесполезна, наивна и потенциально опасна. Таким образом, инженеры, создающие системы управления, часто являются экспертами в конкретных физических системах, которыми они хотят управлять. Аэрокосмические инженеры применяют управление к системам наведения. Инженеры-биосистемы применяют контроль к медицинским и сельскохозяйственным операциям. Инженерам-химикам необходимо управление с обратной связью для управления процессами, которые производят такие разнообразные продукты, как топливо, лекарства и наночастицы. Инженеры-электрики и механики создают системы управления в самых разных системах, включая системы связи, роботов, машины и ветряные турбины. Инженеры и материаловеды контролируют производство компьютерных микросхем. Системные биологи применяют принципы управления с обратной связью и теории систем для понимания и моделирования сложных сетей взаимодействия и обратной связи в биологических системах.В то время как абстрактные модели для этих различных систем во многом схожи, конкретные детали физических проблем во многом связаны с тем, как построены системы управления.
Аэрокосмические инженеры применяют управление к системам наведения. Инженеры-биосистемы применяют контроль к медицинским и сельскохозяйственным операциям. Инженерам-химикам необходимо управление с обратной связью для управления процессами, которые производят такие разнообразные продукты, как топливо, лекарства и наночастицы. Инженеры-электрики и механики создают системы управления в самых разных системах, включая системы связи, роботов, машины и ветряные турбины. Инженеры и материаловеды контролируют производство компьютерных микросхем. Системные биологи применяют принципы управления с обратной связью и теории систем для понимания и моделирования сложных сетей взаимодействия и обратной связи в биологических системах.В то время как абстрактные модели для этих различных систем во многом схожи, конкретные детали физических проблем во многом связаны с тем, как построены системы управления.
Таким образом, контроль включает такие дисциплины, как материалы, механика, биология, химия и электричество. Практически любая научная или инженерная дисциплина — и большинство аспектов нашей личной и профессиональной жизни — были или будут затронуты автоматическим управлением.
Практически любая научная или инженерная дисциплина — и большинство аспектов нашей личной и профессиональной жизни — были или будут затронуты автоматическим управлением.
Тем, кто осознает, насколько они активны из-за автоматического управления: «Пожалуйста.Мы любим то, что мы делаем.»
2 мая 2016 г.
Дэниел Абрамович – Agilent
Р. Рассел Райнхарт – Университет штата Оклахома
Тарик Самад – Honeywell
История автоматического управления
Действия
‘)
var buybox = документ.querySelector(«[data-id=id_»+ метка времени +»]»).parentNode
;[].slice.call(buybox.querySelectorAll(«.вариант-покупки»)).forEach(initCollapsibles)
функция initCollapsibles(подписка, индекс) {
var toggle = подписка. querySelector(«.цена-варианта-покупки»)
querySelector(«.цена-варианта-покупки»)
подписка.classList.remove(«расширенный»)
var form = подписка.querySelector(«.форма-варианта-покупки»)
var priceInfo = подписка.селектор запросов(«.Информация о цене»)
var PurchaseOption = toggle.parentElement
если (переключить && форма && priceInfo) {
toggle.setAttribute(«роль», «кнопка»)
toggle.setAttribute(«tabindex», «0»)
toggle.addEventListener («щелчок», функция (событие) {
var expand = toggle.getAttribute(«aria-expanded») === «true» || ложный
переключать.setAttribute(«расширенная ария», !расширенная)
form.hidden = расширенный
если (! расширено) {
покупкаOption.classList.add(«расширенный»)
} еще {
покупкаOption. classList.remove(«расширенный»)
classList.remove(«расширенный»)
}
priceInfo.hidden = расширенный
}, ложный)
}
}
функция initKeyControls() {
документ.addEventListener(«keydown», функция (событие) {
if (document.activeElement.classList.contains(«цена-варианта-покупки») && (event.code === «Пробел» || event.code === «Enter»)) {
если (document.activeElement) {
событие.preventDefault()
документ.activeElement.click()
}
}
}, ложный)
}
функция InitialStateOpen() {
var buyboxWidth = buybox.смещениеШирина
;[].slice.call(buybox.querySelectorAll(«.опция покупки»)). forEach(функция (опция, индекс) {
forEach(функция (опция, индекс) {
var toggle = option.querySelector(«.цена-варианта-покупки»)
var form = option.querySelector(«.форма-варианта-покупки»)
var priceInfo = option.querySelector(«.Информация о цене»)
если (buyboxWidth > 480) {
переключить.щелчок()
} еще {
если (индекс === 0) {
переключать.щелчок()
} еще {
toggle.setAttribute («ария-расширенная», «ложь»)
form.hidden = «скрытый»
priceInfo.hidden = «скрытый»
}
}
})
}
начальное состояниеОткрыть()
если (window.buyboxInitialized) вернуть
window. buyboxInitialized = истина
buyboxInitialized = истина
initKeyControls()
})()
Принцип автоматического управления | MachineMfg
Автоматическое управление (принцип) относится к использованию дополнительного устройства (называемого устройством управления или контроллером) для приведения машины, устройства или определенного рабочего состояния или параметров (т. е. контролируемой величины) производственного процесса (в совокупности называемые управляемым объектом) автоматически работают по заданному правилу.
Связанное введение
Теория автоматического управления — это техническая наука, изучающая общий закон автоматического управления.
В своей ранней разработке он основывался на теории обратной связи и в основном использовался для промышленного управления.
В годы Великой Отечественной войны в целях проектирования и производства авиационных и морских автопилотов, артиллерийских систем позиционирования, радиолокационных систем слежения и другой военной техники на принципах обратной связи получило дальнейшее развитие и усовершенствование теория автоматического управления.
После войны была сформирована полная система теории автоматического управления.
Это классическая теория управления, основанная на передаточной функции.
В основном изучает анализ и проектирование линейных систем с постоянными константами с одним входом и одним выходом.
В начале 1960-х годов, с введением новой современной прикладной математики и применением электронно-вычислительных машин, чтобы приспособиться к развитию аэрокосмической техники, теория автоматического управления вступила в новую стадию – современную теорию управления.
В основном изучает задачу оптимального управления многомерными параметрами с высокой производительностью и высокой точностью.
Основным используемым методом является метод пространства состояний на основе состояний.
В настоящее время теория автоматического управления продолжает развиваться.
Углубляется теория интеллектуального управления на основе кибернетики, теории информации и бионики.
Система управления
Система автоматического управления
Для реализации различных сложных задач управления объект управления и устройство управления сначала определенным образом соединяются в единое целое.
Это автоматическая система управления.
В системе автоматического управления выходом контролируемого объекта, то есть контролируемой величиной, является физическая величина, требующая жесткого контроля.
Может потребоваться поддерживать постоянное значение, такое как температура, давление или траектория полета.
Устройство управления – совокупность соответствующего механизма, осуществляющего управление управляемым объектом.
Может управлять управляемым объектом по разным принципам и методам, но самым основным из них является система управления с обратной связью, основанная на принципе управления с обратной связью.
Система управления с обратной связью
В системе управления с обратной связью управляющее воздействие, оказываемое управляющим устройством на управляемое устройство, представляет собой информацию обратной связи, полученную от контролируемой величины, которая используется для непрерывной корректировки отклонения между контролируемой величиной и управляющей величиной для реализации управления контролируемая сумма.
Это принцип управления с обратной связью.
Основы автоматического управления промышленностью.
Функция автоматического управления.
Основную идею контура управления с обратной связью легче всего понять с помощью
представляя, что пришлось бы делать оператору, если бы не существовало автоматического управления.
На рис. I показано обычное применение автоматического управления во многих
промышленные предприятия, теплообменник, использующий пар для нагрева холодной воды. В
ручной режим, количество пара, поступающего в теплообменник, зависит от
давление воздуха на клапан, установленный на ручном регуляторе.Чтобы контролировать
температуры вручную, оператор будет следить за указанной температурой, и
сравнивая ее с желаемой температурой, можно было бы открыть или закрыть вентиль до
допустим более-менее пара. Когда температура достигла нужного значения,
оператор просто удерживает этот выход на клапане, чтобы поддерживать температуру
постоянный. При автоматическом управлении регулятор температуры выполняет то же самое.
При автоматическом управлении регулятор температуры выполняет то же самое.
функция. Сигнал измерения на контроллер от температуры
передатчик постоянно сравнивается с сигналом уставки, введенным в
контроллер.На основе сравнения сигналов автоматический регулятор может
Сообщите, находится ли сигнал измерения выше или ниже заданного значения, и переместите
клапана соответственно до тех пор, пока измерение (температура) не достигнет своего конечного значения.
Контур обратной связи .
Этот простой контур управления с обратной связью иллюстрирует четыре основных
элементы любого контура управления с обратной связью
(фигура 2).
измерение
Измерение должно быть выполнено для отображения текущего значения
переменной, управляемой циклом.Общие измерения, используемые в промышленности
включают скорость потока, давление, уровень, температуру, аналитические измерения
такие как pH, ОВП и проводимость и многие другие, характерные для конкретных
отрасли.
конечный привод
Для каждого процесса должен быть конечный привод,
который регулирует подачу энергии или материала в процесс и изменяет
сигнал измерения.Чаще всего это какой-то клапан, но он
также может быть скорость ремня или двигателя, положение жалюзи и т. д.
Процесс
Типы процессов на промышленных предприятиях столь же разнообразны, как и
материалов, которые они производят. Они варьируются от простых и банальных, таких как
петли для контроля скорости потока, для больших и сложных, таких как дистилляция
колонны в нефтехимической промышленности.
Автоматический контроллер
Последним элементом контура является автоматический регулятор. Его работа состоит в том, чтобы
контролировать измерение. «Контролировать» означает держать измерение
в допустимых пределах. В этой статье механизмы внутри автомата
В этой статье механизмы внутри автомата
контроллер не рассматривается. Таким образом, принципы, которые будут обсуждаться, могут
одинаково хорошо применяться как к пневматическим, так и к электронным контроллерам, а также к
контроллеры любых производителей.Все автоматические контроллеры используют одинаковые
общие ответы, хотя внутренние механизмы и данные определения
поскольку эти ответы могут немного отличаться от одного производителя к другому.
Одна из основных концепций заключается в том, что для существования автоматического управления с обратной связью
контур автоматического регулирования должен быть замкнут. Это означает, что информация должна быть
непрерывно проходили по петле. Контроллер должен иметь возможность перемещать
клапан, клапан должен иметь возможность влиять на измерение, а измерение
сигнал должен быть передан контроллеру.Если этот путь прервется в какой-либо точке,
говорят, что петля открыта. Как только петля открывается, например, когда
Как только петля открывается, например, когда
автоматический регулятор ставится на ручной, автомат на
контроллер больше не может перемещать клапан. Таким образом, сигналы от контроллера
в ответ на изменение условий измерения не влияет на клапан и
автоматического управления не существует.
КОНТРОЛЬ ПРОЦЕССА
При выполнении функции управления автоматический регулятор использует
разница между заданным значением и измерительными сигналами для разработки выходного сигнала
сигнал на клапан.Точность и отзывчивость этих сигналов является основным
ограничение возможности контроллера правильно управлять
измерение. Если передатчик не посылает точный сигнал, или если есть
запаздывание измерительного сигнала, способность контроллера манипулировать
процесс будет деградировать. При этом контроллер должен получить
точный сигнал уставки. В контроллерах, использующих пневматический или электронный набор
точечные сигналы, генерируемые контроллером, неправильная калибровка уставки
передатчик обязательно приведет к автоматическому блоку управления в
контроллер приводит измерение к неправильному значению. Способность
Способность
контроллер для точного позиционирования клапана является еще одним ограничением. Если там
трение в клапане, контроллер может быть не в состоянии переместить клапан в
определенное положение штока для создания определенного потока, и это будет отображаться как
разница между измерением и заданным значением. Неоднократные попытки точно
положение клапана может привести к колебаниям клапана и измерения. или,
если контроллер может перемещать клапан очень медленно, способность
контроллер для управления процессом будет деградировать.Один из способов улучшить
реакцией регулирующих клапанов является использование позиционера клапана, который действует как
контроллер обратной связи для позиционирования клапана в точном положении, соответствующем
выходной сигнал контроллера. Однако следует избегать позиционеров в пользу
бустеров объема в быстродействующих контурах, таких как поток и давление жидкости.
Для управления процессом изменение выхода контроллера должно быть в
в таком направлении, чтобы противодействовать любому изменению значения измерения.
На Рисунке 3 показан клапан, напрямую связанный с контролем уровня в резервуаре при
средний масштаб. По мере повышения уровня в резервуаре поплавок снижает скорость потока.
таким образом, чем выше уровень жидкости, тем больше поток будет перекрыт.
Точно так же, когда уровень падает, поплавок открывает клапан, чтобы добавить
больше жидкости в бак. Реакция этой системы показана графически.
По мере изменения уровня от 0% до 100% клапан переходит от полностью открытого к полностью
закрыто.Функция автоматического контроллера состоит в том, чтобы производить такого рода
противоположный ответ в различных диапазонах; кроме того, другие ответы
позволяет более эффективно управлять процессом.
Автоматическое управление | Chalmers
Обнаружение и изоляция неисправностей
В настоящее время безопасность играет решающую роль везде, особенно в тех инженерных приложениях, где может угрожать жизни человека. В других случаях возникающие сбои просто вызывают сбои в системе, что приводит к серьезным экономическим потерям.Поэтому мы вкладываем все больше и больше энергии в разработку новых решений для безопасного проектирования систем…
Сетевое управление
Типичный контур управления состоит из объекта, нескольких датчиков, выполняющих измерения наблюдаемых переменных объекта, контроллера, который использует собранные измерения для вычисления будущих входных данных для объекта, и одного или нескольких приводов, которые применяют входные данные, предписанные контроллер…
В этом проекте проводится исследование решения задач оптимального управления, характеризующихся аффинными системами на входе управления, на которые воздействуют стохастические возмущения и в некоторых случаях также на которые накладываются ограничения по состоянию и/или входу управления. ..
..
Экологические и биологические системы
В этом исследовании мы стремимся использовать управляемость светодиодов для оптимальной регулировки света в соответствии с потребностями садовода и потребностями растений. Поэтому разрабатываются новые методы дистанционного зондирования теплиц, основанные на анализе света растений, для определения подходящих непрерывных онлайн-сигналов обратной связи для контроллера лампы…
Чтобы в полной мере использовать преимущества систем замкнутого водоснабжения, водообмен должен быть как можно меньше.Это подразумевает высокие требования к очистке воды, т.е. поддержание эффективной нитрификации, денитрификации и удаления органических…
Приложения для управления автомобилем
Основная тема исследования в рамках проекта касается того, как можно получить априорную информацию о будущей поездке и использовать ее для повышения энергоэффективности PHEV. Исследование охватывает такие аспекты, как квазистатическое моделирование трансмиссии, выпуклая оптимизация и методы оптимального управления, такие как динамическое программирование. ..
..
В этом проекте используется метод выпуклой оптимизации для определения оптимального размера двигателя внутреннего сгорания, электродвигателя и аккумуляторной батареи одновременно с оптимальной стратегией управления энергопотреблением. Для этого требуются соответствующие модели, которые описывают, как размеры электродвигателя и двигателя внутреннего сгорания влияют на потоки мощности и стоимость этих компонентов…
Многоуровневый преобразователь (MLC) представляет собой силовой электронный преобразователь, который имеет модульную структуру и, следовательно, имеет «дополнительные ручки» для контроля и мониторинга поведения батареи на уровне элемента.Проект направлен на эксплуатацию и управление MLC для оптимизации производительности аккумуляторной системы и увеличения срока службы аккумуляторной батареи…
Жизненно важной частью системы управления горением с обратной связью являются датчики, предоставляющие информацию о горении, которая может быть возвращена в контроллер. В этом проекте исследуется использование для этой цели встроенного датчика крутящего момента коленчатого вала…
В этом проекте исследуется использование для этой цели встроенного датчика крутящего момента коленчатого вала…
Измерение крутящего момента в силовых агрегатах большой мощности
В этом проекте изучается возможность использования датчика крутящего момента АББ (Torductor) между маховиком и коробкой передач.В частности, исследование сосредоточено на двух приложениях; предсказание нулевого крутящего момента и диагностика сгорания…
Интеллектуальные транспортные системы
Усовершенствованные методы управления, реализованные на доступных исполнительных механизмах, таких как светофоры или регулируемые ограничения скорости, позволяют снизить вероятность возникновения заторов или аварий. Кроме того, с помощью системы наблюдения можно вовремя обнаружить несчастные случаи и принять соответствующие меры контроля для их преодоления или уменьшения…
Электроэнергетические приложения
Общая цель этого проекта состоит в том, чтобы исследовать методы управления для систем передачи HVDC на основе преобразователя напряжения. Цель состоит в том, чтобы проанализировать динамику систем HVDC с точки зрения управления и наблюдения и предложить надежные контроллеры…
Цель состоит в том, чтобы проанализировать динамику систем HVDC с точки зрения управления и наблюдения и предложить надежные контроллеры…
Управление ветровой турбиной
Целью предыдущего проектного проекта «Стохастическая модель прогнозирующего управления ветряными турбинами» была разработка готовой концепции новой архитектуры управления для управления ветряной турбиной с расширенными возможностями снижения нагрузки и улучшения выходной мощности.Цель этого проекта была достигнута со следующими результатами…
Чувствительность систем автоматического управления — 1-е издание
Описание книги
Хотя теория чувствительности возникла гораздо раньше в самых разных контекстах, в 60-х годах она стала самостоятельной отраслью науки. С тех пор исследователи со всего мира продолжали добиваться больших успехов как в теории, так и в ее приложениях. Однако многие работы российских научных школ и специалистов остаются неизвестными на Западе.
Чувствительность систем управления обобщает результаты авторов и их учеников по теории чувствительности, обращаясь к основным понятиям теории и проблеме выбора технических параметров систем. Авторы формулируют задачи для реальных технических систем и их моделей, устанавливают связь между теорией чувствительности и классическими задачами устойчивости. Они предлагают важную общую теорию исследования чувствительности краевых задач и используют элементы этой теории для анализа чувствительности решений задач нелинейного программирования и вариационного исчисления, а также колебательных процессов.В книге представлены также общие методы исследования разрывных систем, в том числе описываемых операторными моделями.
Авторы формулируют задачи для реальных технических систем и их моделей, устанавливают связь между теорией чувствительности и классическими задачами устойчивости. Они предлагают важную общую теорию исследования чувствительности краевых задач и используют элементы этой теории для анализа чувствительности решений задач нелинейного программирования и вариационного исчисления, а также колебательных процессов.В книге представлены также общие методы исследования разрывных систем, в том числе описываемых операторными моделями.
Эта книга, полная новых мощных методов и результатов, предлагает тем, кто занимается теоретическими исследованиями, проектированием, тестированием и эксплуатацией различных систем управления, уникальную возможность ознакомиться с работами ведущих российских исследователей в области теории чувствительности. Кроме того, его методы исследования параметрических возмущений, Чувствительность систем управления окажутся полезными в областях, выходящих за рамки теории управления, включая теорию колебаний, динамику движения и математическую экономику.
Содержание
Предисловие
Параметрические модели
Переменные состояния и параметры систем управления
Параметрические модели систем управления
Функции чувствительности и их приложения
Конечномерные непрерывные системы
Конечномерные непрерывные системы в зависимости от параметра
Второй метод Ляпунова в теории чувствительности 9007 on5 Бесконечные интервалы времени
Анализ чувствительности автоколебательных систем во временной области
Чувствительность неавтономных систем
Чувствительность решений краевых задач
Конечномерные разрывные системы
Уравнения чувствительности для конечномерных разрывных систем
Уравнения чувствительности для релейных систем
Уравнения чувствительности для импульсных и релейно-импульсных систем
Разрывные системы, заданные операторными моделями
Операторные параметрические модели систем управления
Операторные модели разрывных систем
Чувствительность операторных моделей
Sensi Уравнения релейных и импульсных систем
Невременные характеристики
Чувствительность передаточной функции и частотной характеристики линейных систем
Чувствительность нулей и полюсов
Чувствительность собственных значений и собственных векторов линейных стационарных систем управления
Чувствительность интегральных показателей качества
Косвенные характеристики Функции чувствительности
чувствительности инварианты
чувствительности инварианты временных характеристик
Корень и переносные характеристики
Чувствительность чувствительности инварианты частотных ответов
чувствительности инварианты интегральных оценок
чувствительности инварианты для гироскопических систем
чувствительность математического программирования
чувствительность к линейным программированию
чувствительность оптимальных решений задач нелинейного программирования
Чувствительность простейшей вариационной задачи
Чувствительность вариационных задач с подвижными границами и угловыми точками
Sensitivit у вариационных задач на условный экстремум
Прикладные задачи чувствительности
Прямые и обратные задачи теории чувствительности
Идентификация динамических систем
Распределение допуска параметров
Синтез нечувствительных систем
Численное решение уравнений чувствительности
Автоматические системы управления – Principedia
Курс: MAE433
Преподаватель: Роули
F 2016
Описание целей курса и учебного плана
MAE 433 представляет собой введение в управление с обратной связью. Курс обучает теории и практике управления динамическими системами (всего, от цепей до автомобилей и спутников). В целом, курс уделяет большое внимание общим принципам обратной связи: обратная связь может снизить чувствительность системы к возмущениям и изменить динамику системы. Понимание того, как каждый раздел материала соотносится с этими принципами, является ключом к успеху.
Большая часть первой половины курса посвящена проектированию управления в частотной области. Это обсуждение включает в себя ПИД-регулирование, инструменты частотной области для анализа контроллеров и методологии проектирования частотной области.Этот раздел не слишком математически насыщен и не требует существенных знаний из предыдущих курсов. Вторая половина курса посвящена проектированию управления во временной области. Это обсуждение включает в себя обратную связь по состоянию, методологии проектирования во временной области, управляемость, наблюдаемость и обратную связь на основе наблюдателя. Этот раздел в значительной степени опирается на линейную алгебру, поэтому повторение тем по линейной алгебре является ключом к успеху.
Материал курса хорошо организован и накапливается в течение семестра, поэтому важно не пропустить ни одного компонента.Хотя поначалу может показаться, что материал первой половины семестра не имеет отношения к материалу второй половины, становится очевидным, что инструменты частотного анализа, изученные в первой части семестра, являются ключевыми для анализа состояния. -космические контроллеры разработаны во второй половине семестра.
Обучение в классе Инструкция
MAE 433 состоит из двух полуторачасовых лекций и одного трехчасового лабораторного занятия в неделю. Лекция следует учебнику курса (который представляет собой просто переплетенные заметки, составленные профессором Роули) и состоит как из теории, так и из примеров, включая демонстрации в Matlab.Поскольку курс движется быстро и строится сам по себе, приход на лекцию является ключом к тому, чтобы не отставать от материала. Профессор Роули — очень интерактивный лектор, он хорошо задает вопросы и отвечает на них. Он также включает совместные викторины и ответы на вопросы на основе карточек для заметок в лекциях. Эти викторины, как правило, являются одними из самых полезных частей лекции, поскольку они дают возможность действительно закрепить концепции. Поскольку они выдаются без предупреждения, приход на лекцию является обязательным, иначе вы можете получить штраф.Лабораторные работы следуют за материалом, представленным в лекции, но являются самостоятельными действиями: нет предварительных лабораторных работ, лабораторных отчетов или других заданий, связанных с лабораторией. Лабораторные работы в основном оцениваются по завершении, поэтому они не вызывают стресса. Уделение внимания лабораторным работам и поиск связей с материалами курса поможет вам в остальной части курса, но лабораторные работы не являются основным направлением.
Эти викторины, как правило, являются одними из самых полезных частей лекции, поскольку они дают возможность действительно закрепить концепции. Поскольку они выдаются без предупреждения, приход на лекцию является обязательным, иначе вы можете получить штраф.Лабораторные работы следуют за материалом, представленным в лекции, но являются самостоятельными действиями: нет предварительных лабораторных работ, лабораторных отчетов или других заданий, связанных с лабораторией. Лабораторные работы в основном оцениваются по завершении, поэтому они не вызывают стресса. Уделение внимания лабораторным работам и поиск связей с материалами курса поможет вам в остальной части курса, но лабораторные работы не являются основным направлением.
Все назначенные чтения взяты из учебника курса, который очень краток, но охватывает весь материал, необходимый для курса. Хорошей стратегией является беглый просмотр соответствующего раздела учебника перед каждой лекцией, а затем его тщательное прочтение перед тем, как приступить к набору задач на эту неделю. Поскольку учебник является всеобъемлющим, знание материала в учебнике является ключом к успешному прохождению курса.
Поскольку учебник является всеобъемлющим, знание материала в учебнике является ключом к успешному прохождению курса.
Обучение для заданий и на основе заданий
Еженедельные наборы задач, как правило, довольно длинные и сложные, и они будут более глубокими, чем примеры в учебнике или лекции. Сотрудничество приветствуется, и очень важно найти хорошую группу для проведения псетов. Проблемы Pset, как правило, делятся на три категории: доказательства, прикладные проблемы и проблемы глубокого проектирования.Доказательства, как правило, кратки и просты, но с ними может быть трудно начать работу, поэтому полезно использовать рабочее время. У многих наборов есть одно или два доказательства, но на экзаменах таких проблем обычно не бывает. Задачи приложений могут включать чтение графиков или диаграмм или короткие вычислительные задачи. У большинства наборов есть как минимум две из этих проблем, а на экзаменах их, как правило, много. Они часто строятся на примерах из учебника, поэтому они очень выполнимы, если вы обратитесь к учебнику. Проблемы дизайна — это более длинные задачи, состоящие из многих частей, которые требуют синтеза многих концепций из курса.Половина итогового экзамена — это одна из этих проблем дизайна, и внимание к ним — ключ к успешной сдаче курса. Рабочие часы — лучший ресурс, чтобы помочь найти подход к ним.
Проблемы дизайна — это более длинные задачи, состоящие из многих частей, которые требуют синтеза многих концепций из курса.Половина итогового экзамена — это одна из этих проблем дизайна, и внимание к ним — ключ к успешной сдаче курса. Рабочие часы — лучший ресурс, чтобы помочь найти подход к ним.
Популярные викторины короткие, и вы можете участвовать в них со своими соседями. Они относительно просты, и будет возможность задать вопросы до того, как викторина будет выдана. Задавать вопросы в это время чрезвычайно важно!
Есть два экзамена: промежуточный и итоговый. Промежуточный экзамен представляет собой 1,5-часовой экзамен в классе и состоит из нескольких более коротких задач, очень похожих на те, которые можно найти в домашнем задании.Промежуточный экзамен открыт, но не открыт для компьютера. Повторное выполнение домашних заданий и выполнение предоставленной практики в середине семестра являются лучшими способами учебы, поскольку оба они представляют собой задачи, аналогичные экзаменационным.
Финал занимает 4 часа и состоит из нескольких коротких задач и одной длинной задачи на дизайн. Он очень похож на набор задач, хотя охватывает гораздо более широкий объем материала. Это открытая книга, и MatLab можно использовать для решения задачи проектирования. Как и в случае промежуточного семестра, повторное выполнение домашних заданий и выполнение итогового экзамена по практике являются ключом к успешной сдаче выпускного экзамена.Поскольку в финальном выпуске есть проблема с дизайном, которая включает в себя материал, полученный в течение всего семестра, особенно важно рассмотреть проблемы с дизайном на более поздних наборах. Также важно быть хорошо знакомым с MatLab, особенно с функцией справки, так как вы не сможете пользоваться Интернетом во время экзамена.
Внешние ресурсы
Рабочие часы — отличный ресурс как для концептуальных вопросов, так и для домашних заданий. В целом, рабочее время профессора Роули лучше всего подходит для концептуальных вопросов, в то время как рабочее время ТА, как правило, лучше подходит для вопросов, специфичных для множества.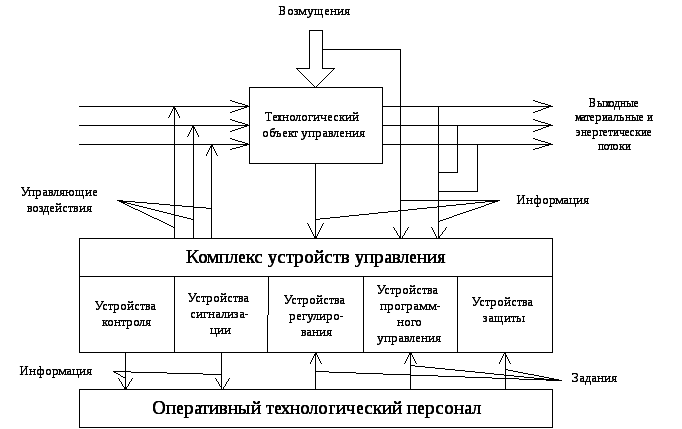 TA также очень охотно планируют дополнительные рабочие часы, если вы чувствуете себя отстающим.
TA также очень охотно планируют дополнительные рабочие часы, если вы чувствуете себя отстающим.
Для самостоятельного изучения лучше всего подойдет учебник. Поскольку профессор Роули написал конспекты курса, чтобы они содержали именно то, на чем он фокусируется, обычно они должны быть первым местом, куда можно обратиться, если они запутались. Однако в книге «Системы обратной связи: введение для ученых и инженеров» К.Дж. Острём и Р.М. Мюррей также является полезным учебником и находится в резерве инженерной библиотеки. В нем есть дополнительная информация и примеры помимо тех, что в примечаниях к курсу, но они не так сосредоточены на соответствующем материале.
Что учащиеся должны знать об этом курсе для целей выбора курса
MAE 433 учит основам теории управления, что полезно для всех студентов, изучающих инженерные науки и информатику. Студенты, заинтересованные в карьере в области робототехники, производства, проектирования процессов, обработки сигналов или многих других областей, найдут непосредственное применение материалу, изложенному в этом курсе.