Драйверы от TI: Управляй любым электродвигателем. Драйвер для шагового двигателя
Драйверы от TI: Управляй любым электродвигателем
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами электродвигателей, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных. Электродвигатели самого разного назначения являются одной из основных составляющих любого производства, повсеместно используются в офисной и домашней технике, в системах мониторинга и управления зданий и объектов. Очень широкое распространение электродвигатели нашли на современном транспорте. Еще более впечатляющее будущее уготовано электродвигателям в электромобилях и роботах.
С развитием технологий традиционные двигатели совершенствуются и находят все новые области применения. Современные высокоточные станки и робототехника немыслимы без электродвигателей с интеллектуальными системами управления. На земле, в воздухе и под водой электродвигатели остаются широко востребованным преобразователем электрической энергии в механическую.
Типы электродвигателей, способы управления и возникающие сложности
Впервые созданный в 1834 году русским ученым Якоби преобразователь электрической энергии во вращательное движение получил название электродвигатель. С тех пор он был серьезно усовершенствован – появилось множество новых вариантов, но использованные при его создании принципы электромагнетизма по-прежнему являются основой всех модификаций современных электродвигателей.
Проводник с проходящим по нему током (рисунок 1) создает вокруг себя магнитное поле, интенсивность (магнитная индукция) которого пропорциональна количеству витков, в случае использования катушки (N), и величине проходящего по ней тока (I), где, В – вектор магнитной индукции, К – магнитная постоянная, N – число витков, I – сила тока.
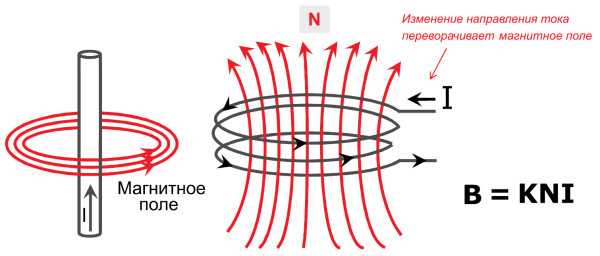
Рис. 1. Электромагнетизм в основе работы электродвигателя
Изменение направления тока влияет и на направление магнитного поля проводника.
При этом на помещенный во внешнее магнитное поле проводник с током действует сила Лоренца, вызывающая его вращательное перемещение. Направление вращения легко определяется с помощью известного правила правой руки для проводника с током в магнитном поле (рисунок 2). Сила (F), действующая на проводник в магнитном поле, равна произведению силы тока (I) в проводнике на вектор магнитной индукции поля (B) и длину проводника (L). F = LIB.
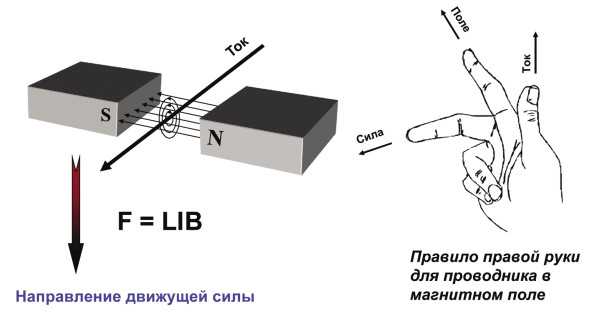
Рис. 2. Перемещение проводника с током в магнитном поле (Сила Лоренца)
Коллекторные двигатели
Коллекторные двигатели постоянного тока (Brushed DC или BDC, по терминологии TI) сегодня относятся к одним из наиболее распространенных механизмов электромагнитного вращения.
В магнитном поле собранного из постоянных магнитов статора вращается многосекционный ротор с катушками, которые попарно и попеременно подключаются через коммутируемые коллекторные ламели на оси ротора (рисунок 3). Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Источник тока всегда подключен к катушкам, силовые линии магнитного поля которых смещены на угол, близкий к 90°, относительно магнитного поля статора.

Рис. 3. Принцип действия коллекторного электродвигателя (BDC)
Электродвигатели подобного типа часто используют статор с постоянными магнитами. Они позволяют легко регулировать скорость вращения и отличаются невысокой стоимостью.
Также широко используется вариант 2-обмоточного электродвигателя подобного типа, но со статорной обмоткой вместо постоянного магнита. Такие модели обладают большим пусковым моментом и могут работать не только на постоянном, но и на переменном токе. Электродвигатели подобного типа почти повсеместно используются в различной бытовой технике.
К недостаткам этой конструкции BDC стоит отнести износ щеточно-коллекторного узла в процессе эксплуатации. Кроме того, из-за искрообразования при коммутации отдельных обмоток ротора отмечается повышенный уровень электромагнитных помех, что не позволяет использовать такие двигатели во взрывоопасных средах.
Особенностью двигателей BDC также является повышенный нагрев ротора, охлаждение которого затруднено в силу конструктивных особенностей двигателя.
Достоинства коллекторных двигателей:
- малая стоимость;
- простая система управления;
- 2-обмоточные коллекторные двигатели, обладающие высоким крутящим моментом и способные работать на постоянном и переменном токе.
Особенности эксплуатации коллекторных двигателей:
- щетки требуют периодического обслуживания, понижают надежность двигателя;
- в процессе коммутации возникают электрические искры и электромагнитные помехи;
- затруднен отвод тепла от перегревающегося ротора.
Бесколлекторные двигатели
Несколько менее распространенными среди двигателей постоянного тока являются модели с бесщеточной конструкцией (BrushLess DC или BLDC), использующие ротор с постоянными магнитами, которые вращаются между электромагнитами статора (рисунок 4). Коммутация тока здесь выполняется электронным способом. Переключение обмоток электромагнитов статора заставляет магнитное поле ротора следовать за его полем.
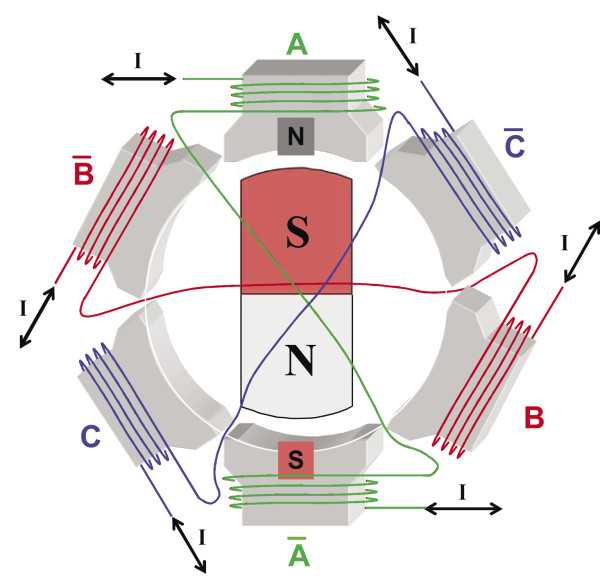
Рис. 4. Принцип действия бесколлекторного электродвигателя (BLDC)
Текущее положение ротора обычно контролируется энкодерами или датчиком на основе эффекта Холла, либо применяется технология с измерением напряжения противо-ЭДС на обмотках без использования в этом случае отдельного датчика положения ротора (SensorLess).
Коммутация тока обмоток статора выполняется с помощью электронных ключей (вентилей). Именно поэтому бесколлекторные двигатели BLDC часто называют «вентильными». Очередность подключения пары обмоток двигателя происходит в зависимости от текущего положения ротора.
Принцип работы BLDC основан на том, что контроллер коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был сдвинут на угол, близкий к 90° или -90° относительно вектора магнитного поля ротора. Вращающееся при переключении магнитное поле заставляет перемещаться вслед за ним ротор с постоянными магнитами.
При использовании трехфазного сигнала управления подключенными к источнику тока всегда оказываются только две пары обмоток, а одна – отключена. В результате последовательно используется комбинация из шести состояний (рисунок 5).
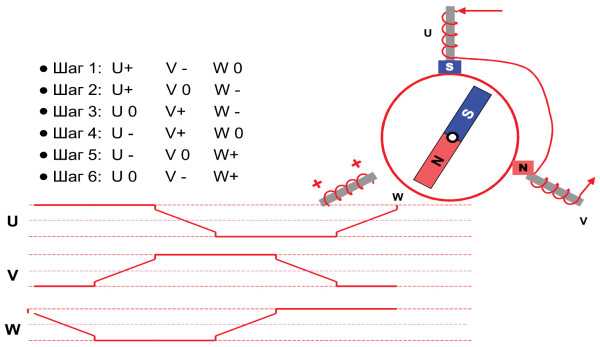
Рис. 5. Чередование фаз при вращении BLDC
Электродвигатели без датчиков положения ротора отличаются повышенной технологичностью процесса изготовления и более низкой стоимостью. Подобная конструкция упрощает герметизацию внешних подключаемых выводов.
В качестве датчиков скорости и положения ротора в BLDC могут использоваться датчики Холла, которые отличаются небольшой стоимостью, но также и достаточно невысоким разрешением. Повышенное разрешение обеспечивают вращающиеся трансформаторы (резольверы). Они отличаются высокой стоимостью и требуют использования ЦАП, так как выходной сигнал у них синусоидальный. Высоким разрешением, но пониженной надежностью, обладают оптические датчики. На рисунке 6 представлены выходные сигналы датчиков разного типа при вращении ротора двигателя.
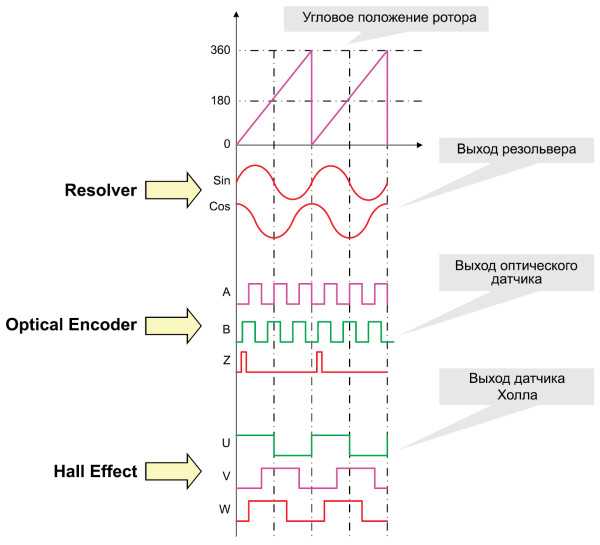
Рис. 6. Датчики положения ротора электродвигателей
Преимущества двигателей BLDC:
- высокая эффективность;
- отсутствие щеток, обеспечивающее повышенную надежность, снижение затраты на обслуживание;
- линейность тока/крутящего момента;
- упрощенный отвод тепла.
Особенности применения двигателей BLDC:
- более сложная система управления с обратной связью по положению ротора;
- пульсации крутящего момента.
Шаговые двигатели
Шаговые двигатели (ШД) получили достаточно широкое распространение в системах автоматики и управления. Они являются еще одним типом бесколлекторных двигателей постоянного тока. Конструктивно ШД состоят из статора, на котором размещены обмотки возбуждения, и ротора, выполненного из магнитных материалов. Шаговые двигатели с магнитным ротором позволяют обеспечить больший крутящий момент и жесткую фиксацию ротора при обесточенных обмотках.
В процессе вращения ротор ШД перемещается шагами под управлением подаваемых на обмотки статора импульсов питания. Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме. Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи. Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования (величина шага) зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов.
В зависимости от конфигурации схемы подключения обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет в каждой из двух фаз единую обмотку для обоих полюсов статора, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Для управления таким ШД требуется мостовой драйвер или полумостовая схема с 2-полярным питанием. При биполярном управлении одновременно работают две обмотки и крутящий момент примерно на 40% больше. На рисунке 7 представлена последовательность сигналов управления при вращении биполярного ШД.
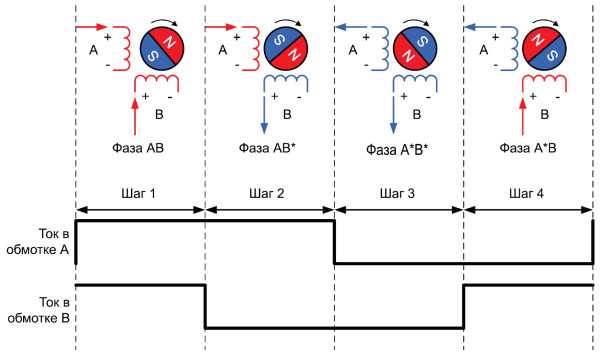
Рис. 7. Последовательность сигналов управления биполярным ШД
Униполярный двигатель использует в каждой фазе одну обмотку со средним выводом и позволяет использовать более простую схему управления с одним ключом на каждую из четырех полуобмоток.
Четырех обмоточные ШД могут использоваться как в биполярной, так и в униполярной конфигурации.
При протекании тока по одной из катушек ротор стремится изменить положение так, чтобы противоположные полюса ротора и статора установились друг против друга. Для непрерывного вращения ротора катушки попеременно переключают.
На практике используются разные способы подачи питания на четыре обмотки статора. Чаще всего применяют попарное подключение с полношаговым или полушаговым режимом работы. В полношаговом режиме ротор с двумя полюсами, вращающийся в переключаемом магнитном поле двух пар катушек, может занимать четыре положения (рисунок 8).
Рис. 8. Полношаговый режим управления ШД
Получить удвоенную точность позиционирования и восемь позиций позволяет полушаговый режим работы (рисунок 9). Для его реализации добавляется промежуточный шаг с одновременной запиткой всех четырех катушек.
Рис. 9. Полушаговый режим управления ШД
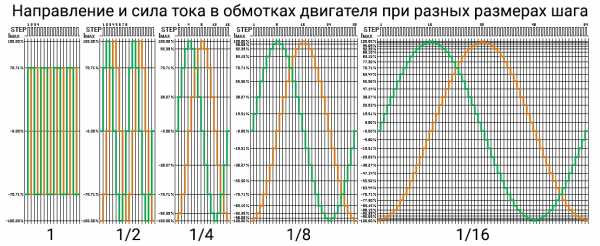
Значительно увеличить количество промежуточных положений и точность позиционирования позволяет режим микрошага. Идея микрошага заключается в подаче на обмотки шагового двигателя вместо импульсов управления непрерывного сигнала, напоминающего по форме ступенчатую синусоиду (рисунок 10). Полный шаг в этом случае делится на маленькие микрошаги, а вращение становится более плавным. Режим микрошага позволяет получить наиболее точное позиционирование. Кроме того, в этом режиме значительно снижается присущая шаговым двигателям вибрация корпуса.
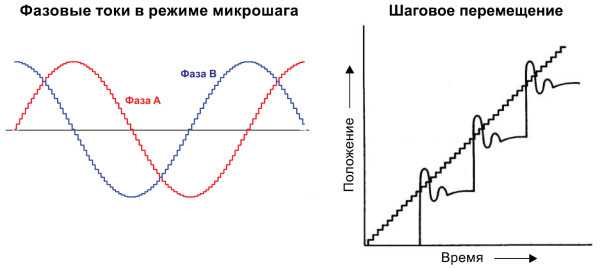
Рис. 10. Управление ШД в режиме микрошага
Достоинства шаговых двигателей:
- невысокая стоимость благодаря отсутствию схем контроля скорости вращения и позиционирования;
- высокая точность позиционирования;
- широкий диапазон скоростей вращения;
- простой интерфейс управления с цифровыми контроллерами;
- очень высокая надежность;
- хороший удерживающий момент.
Особенности применения шаговых двигателей:
- ШД присуще явление резонанса;
- из-за отсутствия обратной связи возможна потеря контроля положения;
- потребление энергии не уменьшается даже при работе без нагрузки;
- затруднена работа на очень высоких скоростях;
- невысокая удельная мощность;
- достаточно сложная схема управления.
Традиционные решения для управления электродвигателями
Современная прецизионная система управления электродвигателем постоянного тока включает в себя микроконтроллер для обработки данных и блок управления питанием обмоток двигателя, часто называемый драйвером. В состав драйвера входит логическая схема для преобразования кодированных посылок в цифровые управляющие сигналы, из которых в блоке Gate Driver формируются аналоговые сигналы для управления силовыми ключами на основе полевых транзисторов (FET). FET могут входить в состав драйвера или размещаться в отдельном блоке. Кроме того, в состав драйвера входят схемы защиты силовых цепей и цепи обратной связи для контроля работы двигателя.
На рисунке 11 представлены варианты блок-схем для интегрированного и предварительного драйверов. Каждое из решений имеет свои преимущества и особенности. Предварительный драйвер (Pre-Driver) имеет значительно облеченный температурный режим, позволяет выбирать внешние силовые ключи в соответствии с мощностью подключаемого двигателя. Полнофункциональный интегрированный драйвер позволяет создавать более компактные системы управления, минимизирует внешние соединения, но значительно усложняет обеспечение необходимого температурного режима.
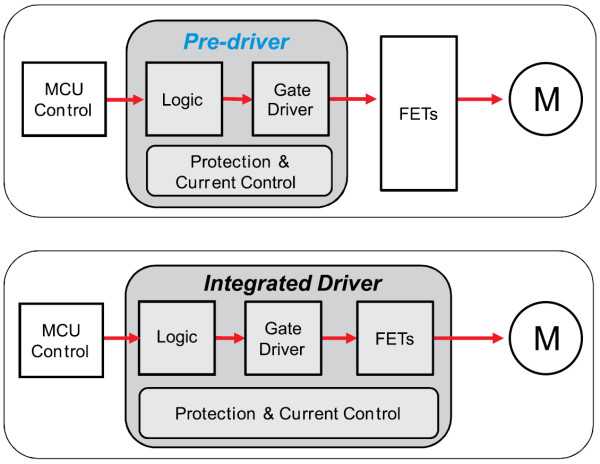
Рис. 11. Блок-схемы систем управления двигателем
Так, у интегрированного драйвера TI DRV8312 максимальная рабочая температура отдельных элементов на плате может достигать 193°С, а у предварительного драйвера DRV8301 этот показатель не превышает 37°С.
Рис. 12. Смена направления вращения коллекторного двигателя
Одной из наиболее распространенных схем для коммутации обмоток двигателей является мост типа “H”. Название схемы связано с конфигурацией подключения, которая похожа на букву “H”. Эта электронная схема позволяет легко изменять направление тока в нагрузке и, соответственно, направление вращения ротора. Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ. H-мост предназначен, в первую очередь, для смены полярности питания двигателя – реверса (рисунок 12), но также позволяет тормозить вращение, коротко замыкая выводы обмоток (рисунок 13).
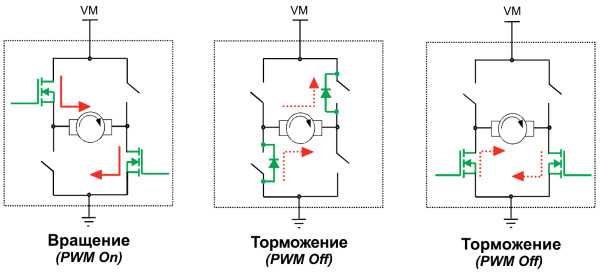
Рис. 13. Режимы вращения, быстрого и медленного торможенияс
Важнейшей характеристикой силовых элементов моста, в качестве которых сегодня часто используют полевые транзисторы с изолированным затвором, является величина сопротивления открытого канала между истоком и стоком транзистора – RDSON. Значение RDSON во многом определяет тепловые характеристики блока и энергетические потери. С увеличением температуры RDSON также растет, а ток и напряжение на обмотках уменьшаются.
Использование управляющих сигналов с ШИМ позволяет уменьшить пульсации крутящего момента и обеспечить более плавное вращение ротора двигателя. В идеале частота ШИМ должна быть выше 20 кГц, чтобы избежать акустического шума. Но с увеличением частоты растут потери на транзисторах моста в процессе коммутации.
Из-за индуктивных свойств нагрузки в виде обмоток форма тока в ней не соответствует форме подаваемого напряжения ШИМ. После подачи импульса напряжения ток нарастает постепенно,а в паузах ток плавно затухает из-за возникновения в обмотках противо-ЭДС. Наклон кривой на графике тока, амплитуда и частота пульсаций влияют на рабочие характеристики двигателя (пульсации крутящего момента, шум, мощность и так далее).
Для ускоренного затухания в обмотках электродвигателей возбуждаемого эффектом противо-ЭДС тока используют диоды в обратном включении, шунтирующие переходы «сток-исток» транзисторов, либо закорачивают обмотки через переходы «сток-исток» двух транзисторов, одновременно включенных в разных плечах моста. На рисунке 13 представлены три состояния моста: рабочее, быстрого торможения (Fast Decay) и медленного торможения (Slow Decay).
А наиболее эффективным считается комбинированный режим (Mixed Decay), при котором в паузе между рабочими импульсами сначала работают диоды, шунтирующие сток-исток транзисторов, а затем включаются транзисторы в нижних плечах моста.
Решения для управления электродвигателями от TI
Среди полупроводниковых компонентов, выпускаемых компанией TI, представлен обширный ассортимент различных драйверов для управления электродвигателями постоянного тока. Все они требуют минимума внешних компонентов, позволяют создавать компактные решения для управления двигателями с рабочим напряжением до 60 В, отличаются повышенной надежностью, обеспечивают быстрое и простое проектирование систем привода электродвигателями.
Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера (MCU), обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления. Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры.
Весь модельный ряд драйверов TI разбит на три раздела: шаговые, коллекторные и бесколлекторные двигателей постоянного тока. В каждом из них на сайте компании действует удобная система подбора по целому ряду параметров. Есть отдельные драйверы, предназначенные для использования с двигателями разных типов.
Драйверы TI для шаговых двигателей
Большой раздел решений TI для управления двигателями включает драйверы для ШД (рисунок 14), которые выпускаются как со встроенными силовыми ключами на основе FET, так и в виде предварительных драйверов, предоставляющих пользователю подбор необходимых силовых ключей. Всего в модельном ряду компании более 35 драйверов для ШД.
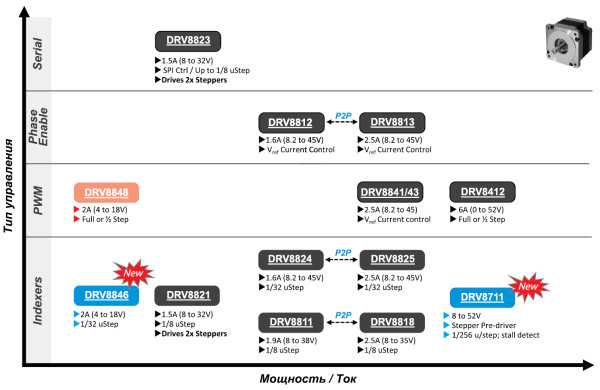
Рис. 14. Драйверы TI для управления шаговыми двигателями
TI предлагает широкий выбор наиболее современных решений для управления перемещением и точным позиционированием с использованием микрошаговых схем управления, обеспечивающих электродвигателей плавным перемещением в широком диапазоне напряжения и тока.
Отдельные драйверы, используя один управляющий контроллер, позволяют управлять сразу двумя двигателями, имея для этого четыре встроенных моста на основе FET. Есть драйверы с встроенными FET, например, DRV8834, которые можно подключить для управления к двум обмоткам шагового двигателя или использовать эти же выводы для управления двумя электродвигателями постоянного тока (рисунок 15).
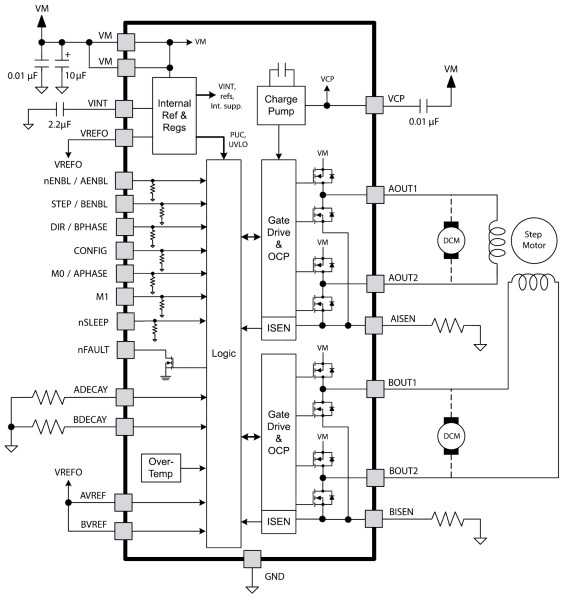
Рис. 15. Блок-схема драйвера DRV8834
Для более плавного перемещения ротора в драйверах для ШД используется настраиваемый механизм сглаживания импульсов тока (режимы Slow, Fast, Mixed Decay). Система расчета микрошага может быть следующих типов:
- встроенной в драйвер;
- с использованием внешнего опорного сигнала.
Не требуют внешнего контроллера для микрошагового перемещения драйверы DRV881, DRV8818, DRV8821, DRV8824 и DRV8825. Здесь шаг перемещения и алгоритм коммутации обмоток рассчитываются схемой, встроенной в драйвер.
Более простые драйверы DRV8812, DRV8813, DRV8828, DRV8829, DRV8841, DRV8842 и DRV8843 обеспечивают микрошаговое вращение с использованием получаемого от внешнего контроллера опорного напряжения (Vref). Уровень дробления основного шага может достигать 1/128 или 1/256.
Для управления ШД с униполярным подключением обмоток TI предлагает драйверы DRV8803, DRV8804, DRV8805 и DRV8806.
Драйверы TI для BDC
Для управления – коллекторными электродвигателями постоянного тока – предназначено специальное семейство драйверов DRV8x, ряд представителей которого изображен на рисунке 16. Они обеспечивает полную защиту от превышения напряжения и тока, короткого замыкания и перегрева. Благодаря возможностям интерфейса управления эти драйверы обеспечивают простую и эффективную эксплуатацию двигателей. Пользователи могут с помощью одного чипа управлять одним или несколькими двигателями c рабочим напряжением 1,8…60 В.
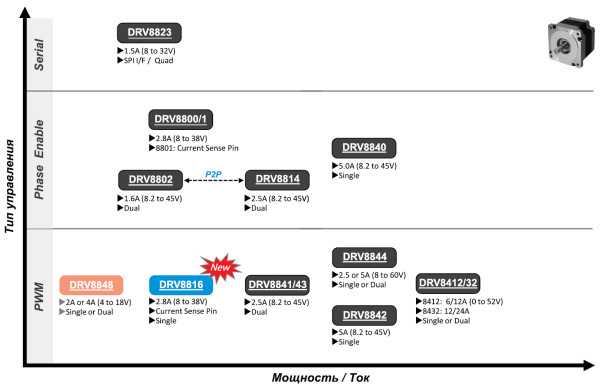
Рис. 16. Драйверы TI для управления коллекторными двигателями
Драйверы семейства выпускаются как с интегрированными силовыми ключами, так и как предварительные драйверы. Они требуют минимум дополнительных компонентов, обеспечивают компактность решений, сокращают время разработки и позволяют быстрее выпустить новые продукты на рынок.
Спящий режим (Sleep) позволяет минимизировать потребление энергии в режиме простоя и обеспечивает ускоренную активизацию при запуске двигателя. Для управления скоростью вращения могут использоваться внешние сигналы ШИМ или сигналы PHASE/ENABLE для выбора направления вращения и включения ключей выходного моста.
Имеющий четыре выходных моста драйвер DRV8823 способен управлять двумя ШД или одним ШД и двумя BDC, или же четырьмя BDC, используя при этом управляющий интерфейс SPI.
На рисунке 17 представлена функциональная схема простого драйвера DRV8837 для управления одним коллекторным двигателем.
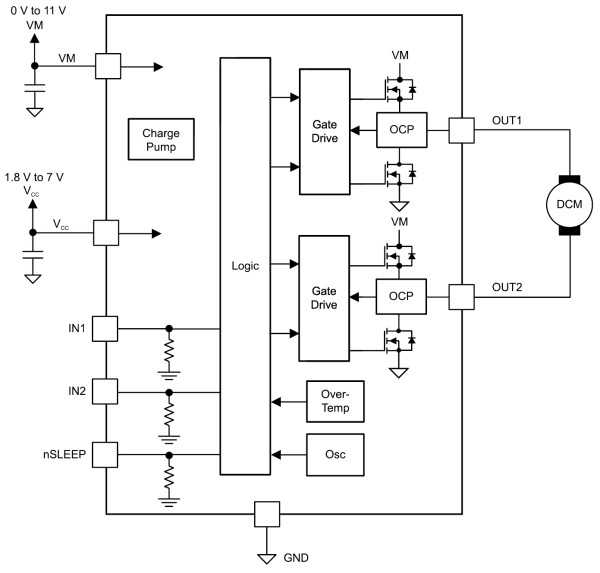
Рис. 17. Блок-схема драйвера DRV8837
Драйверы TI для BLDC
Драйверы TI для бесколлекторных двигателей, или BLDC, могут включать интегрированный силовой мост или использовать внешние силовые транзисторы. Схема формирования 3-фазных сигналов управления также может быть внешней или встроенной.
Семейство драйверов для управления бесколлекторными электродвигателями включает модели c разным принципом управления и с различным крутящим моментом. Эти драйверы, обеспечивающие разные уровни шума при управлении BDLС, идеально подойдут для использования в промышленном оборудовании, автомобильных системах и другой технике. Чтобы гарантировать надежную эксплуатацию электродвигателей, драйверы обеспечивают всеобъемлющий набор защит от превышения тока, напряжения и температуры. На рисунке 18 представлены лишь некоторые из 3-фазных драйверов для BLDC в обширном и постоянно пополняющемся модельном ряду компании TI.
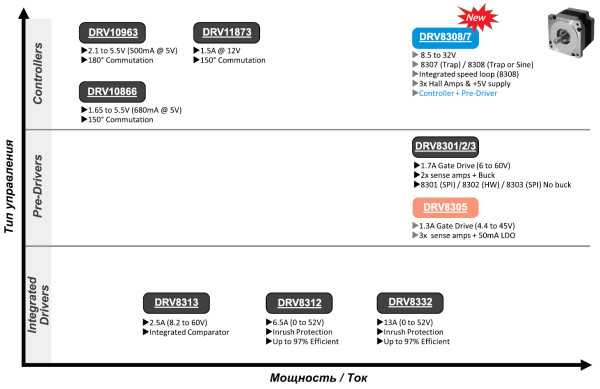
Рис. 18. Драйверы TI для управления бесколлекторными двигателями
Для контроля текущего положения вращающегося ротора могут использоваться внешние датчики разных типов или схема управления с определением позиции ротора по величине противо-ЭДС (Back Electromotive Force, BEMF).
Управление может выполняться с помощью ШИМ, аналоговых сигналов или через стандартные цифровые интерфейсы. Наборы настраиваемых параметров для управления вращением могут храниться во внутренней энергонезависимой памяти.
На рисунке 19 представлен работающий в широком диапазоне температур 40…125°C интеллектуальный драйвер для BLDC со встроенными силовыми ключами на полевых транзисторах, с сопротивлением открытого канала лишь 250 мОм. При диапазоне рабочих напряжений 8…28 В драйвер может обеспечивать номинальный ток 2 А и пиковый ток 3 А.
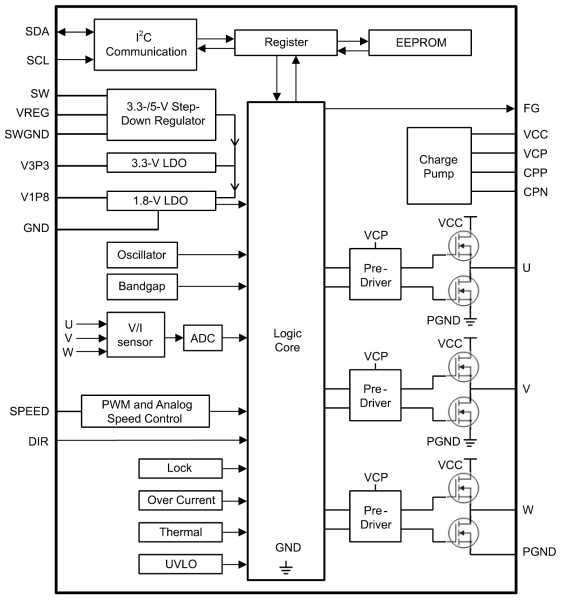
Рис. 19. Блок-схема драйвера DRV10983
Драйвер не требует внешнего датчика для контроля положения ротора, но может использовать внешний резистор для контроля потребляемой двигателем мощности. DRV10983 отличается незначительным энергопотреблением, составляющим всего 3 мА, в дежурном режиме. А в модели DRV10983Z этот показатель доведен до уровня 180 мкА.
Встроенный интерфейс I2C обеспечивает диагностику и настройку, доступ к регистрам управления работой логической схемы и хранящимся в памяти EEPROM рабочим профилям драйвера.
Расширенный комплект защитных функций обеспечивает остановку двигателя в случае превышения тока и понижения напряжения. Предусмотрено ограничение входного напряжения. Защита по превышению тока работает без использования внешнего резистора. Методы использования защиты настраиваются через специальные регистры.
Заключение
Электродвигатели находят все более широкое применение в самом различном оборудовании, совершенствуются и получают новые возможности во многом благодаря современным системам электропривода.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами двигателей постоянного тока. На их основе компания предлагает масштабируемые в зависимости от требований по точности, мощности и функциональности решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Получение технической информации, заказ образцов, заказ и доставка.
Наши информационные каналы
Рубрика: примеры применений Метки: Texas Instrument, Texas Instruments, TI, бесколлекторный двигатель, коллекторный двигатель, НЭ, управление электродвигателями, шаговый двигатель, электродвигатели
О компании Texas Instruments
В середине 2001 г. компании Texas Instruments и КОМПЭЛ заключили официальное дистрибьюторское соглашение, которое явилось результатом длительной и успешной работы КОМПЭЛ в качестве официального дистрибьютора фирмы Burr-Brown. (Как известно, Burr-Brown вошла в состав TI так же, как и компании Unitrode, Power Trend и Klixon). С этого времени компания КОМПЭЛ получила доступ к поставке всей номенклатуры производимых компанией TI компонентов, ...читать далее
www.compel.ru
Драйвер для шагового двигателя из принтера
Бытовая техника
Главная Радиолюбителю Бытовая техника
Простой драйвер для шагового двигателя
Порой встает вопрос о том, как бы управлять шаговым двигателем. Как правило, это нужно осуществить, при проектировании какой-нибудь самоделки или более серьезного проекта, например станка с числовым программным управлением. Естественно, такое управление можно купить. Но, драйвер для шагового двигателя из принтера также можно сделать. Это будет самый простой вариант, который наглядно продемонстрирует возможность управлять этим устройством.
Понадобится старый принтер или сканер, можно неработающий. Оттуда, собственно, и будет извлечен шаговый двигатель, если такового нет в наличии. Также из платы потребуется выпаять управляющую микросхему под названием ULN2003. Она может быть и другая, в разной технике стоят различные микросхемы. Подойдут её аналоги: TD62003, отечественная К1109КТ22, более популярная MC1413, L203 и SG2003.
В принципе, подойдут и собратья этих микросхем, такие как ULN2023A, ULN2803 и им подобные. Стоит только смотреть даташиты. Микросхемы можно купить или выпаять из подобной техники. При выпаивании стоит быть осторожными, так как такие электронные компоненты извлекаются сложнее, и есть угроза повреждения их ножек.
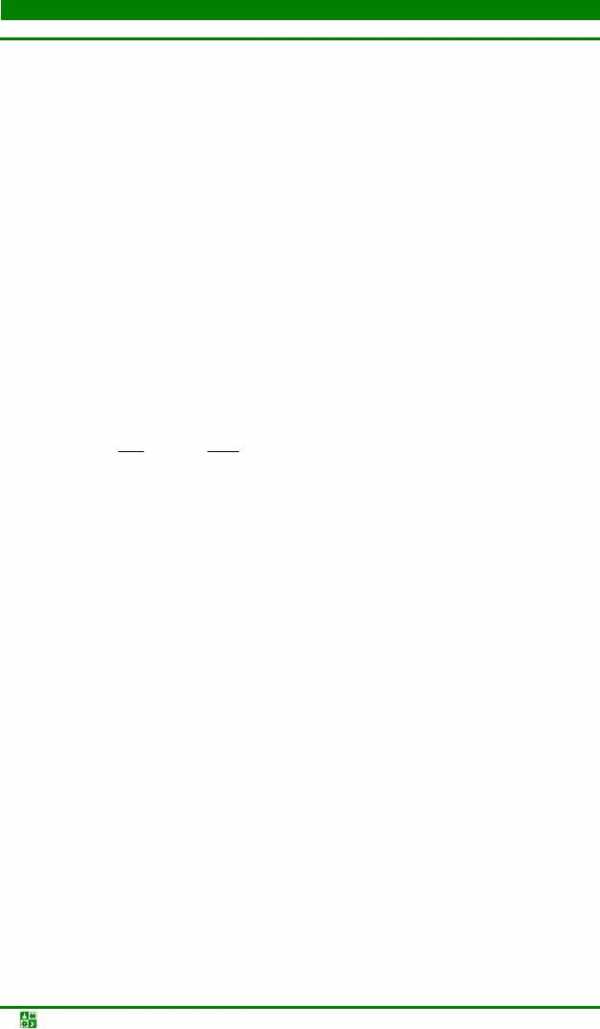
Схема подключения
Схема подключения проста.
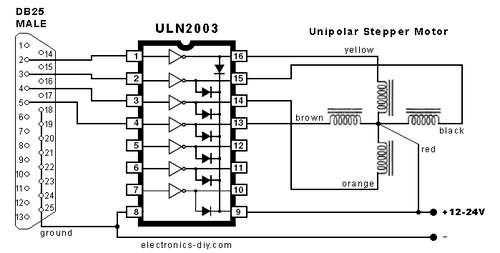
Потребуется приобрести разъем DB-25, который будет подключаться к порту компьютера, для управления двигателем, в случае, если конструируется ЧПУ станок. Диапазоны входного напряжения указаны для конкретно этой микросхемы. Остальные микросхемы, возможно, потребуют отличного от этого напряжения питания.В качестве источника питания отлично подойдет компьютерный блок питания. В принципе, подойдет любое зарядное или БП, напряжением от 12В до 24В, с током от 350мА. Стоит отметить, что желательно обладать технической документацией к модели используемого двигателя, что упростит его подключение к драйверу.
Сам драйвер выглядит так:
В случае если документация не найдена на двигатель, то попробовать найти шины питания требуется в первую очередь. Сделать это можно, как наугад, с возможностью спалить микросхему, так и используя батарейку, к примеру, если двигатель рассчитан на небольшое напряжение.
Если конструкция делается для станка с ЧПУ, то на компьютер потребуется скачать программу Turbo CNC и настроить её под свои нужды.
Дата публикации: 30.11.2017
Мнения читателейНет комментариев. Ваш комментарий будет первый.
Вы можете оставить свой комментарий, мнение или вопрос по приведенному вышематериалу:
www.radioradar.net
Драйвер шагового двигателя с микрошаговым режимом
Разное
Главная Радиолюбителю Разное
В статье представлены схема и конструкция, описан принцип действия драйвера биполярного шагового двигателя на базе микроконтроллера ATmega48. Он способен работать со многими двигателями, не содержит специализированных микросхем для управления шаговыми двигателями. Универсальность обеспечена оригинальным методом поддержания заданного тока в обмотках двигателя. Эта конструкция может послужить основой для создания аналогичных устройств, содержащих дополнительные элементы безопасности - опторазвязку входных цепей, защиту от замыкания нагрузки и пр. В описываемом устройстве в связи с предполагаемыми "умеренными"условиями его эксплуатации и для ограничения стоимости такие узлы не предусмотрены.
Целью разработки было создание простого и недорогого драйвера биполярного шагового двигателя универсального применения. Всё программное обеспечение написано на языке ассемблера AVRASM и оптимизировано по времени выполнения, что позволило решить задачу на имеющейся на момент разработки элементной базе.
Основные технические характеристики
Напряжение питания силовой части, В ...................27
Напряжение питания логической части, В ................12
Максимальная амплитуда тока фазы двигателя, А, не менее ....................... 5
Минимальная амплитуда тока фазы двигателя, А, не более .......................0,25
Предустанавливаемый коэффициент деления шага ... .1/8, 1/4, 1/2, 1/1
Автопонижение тока в режиме удержания, %...............65
Задержка автопонижения тока относительно последнего шага, с ..............3,4
Уровни управляющих сигналов ......................ТТЛ,5 В
Максимальная частота шагов, кГц.......................12
Габариты, мм .............102x68x40
Принципиальная схема драйвера приведена на рис. 1 . В его основу положены мостовые формирователи тока фаз А и В на полевых транзисторах VT1-VT4, VT5-VT8 соответственно, управляемые специализированными микросхемами-драйверами верхних и нижних ключей полумоста DA5-DA8 IR2104S. Для повышения помехоустойчивости применено раздельное питание силовой части (27 В) и логической части с драйверами силовых ключей (12 В).
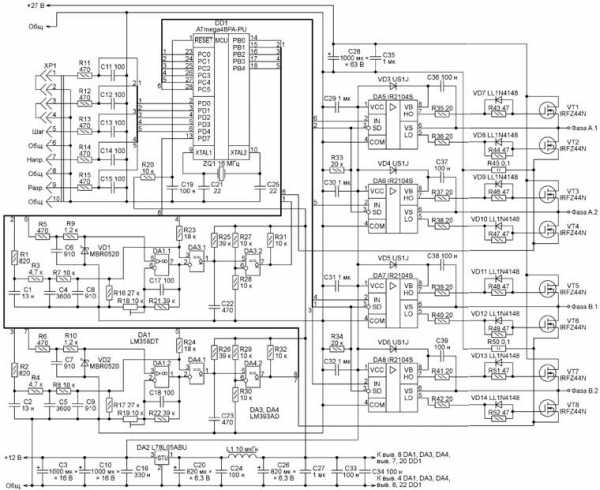
Рис. 1. Принципиальная схема драйвера
Далее рассмотрим часть схемы, относящуюся к одной из фаз (фазе А), поскольку часть, относящаяся к фазе В, действует аналогично.
Мгновенное значение тока фазы устройство определяет по падению напряжения на резисторе R45, которое через интегрирующую цепь R5C6 поступает на неинвертирующий вход усилителя DA1.1 с регулируемым коэффициентом усиления, выполняющего также функцию ФНЧ первого порядка. С выхода усилителя сигнал приходит на инвертирующий вход компаратора DA3.1. Компаратор сравнивает сигнал, пропорциональный текущему через фазу двигателя току, с образцовым напряжением. Его формирует в виде ступенчатой синусоиды (для микрошагового режима работы) Таймер 1 микроконтроллера, работающий в режиме "Быстрая ШИМ" без предварительного деления. Сигнал с выхода таймера пропущен через многозвенный фильтр R1C1R3C4R7C8. Период следования широтно-модулированных импульсов - 12,7 мкс, что соответствует частоте 78,4 кГц. Резистор R23 в рабочем режиме в формировании образцового напряжения не участвует, так как выход PB3 микроконтроллера, к которому он подключён, находится в высокоимпедансном состоянии.
В режиме удержания (после отсутствия импульсов на входе "Шаг" в течение последних 3,4 с) программа устанавливает на выходе PB3 микроконтроллера низкий логический уровень, и амплитуда образцового сигнала понижается. С выхода компаратора DA3.1 с открытым коллектором, нагруженного резистором R25, результат сравнения поступает на вход компаратора DA3.2. Выход компаратора DA3.1 связан также с общим проводом через конденсатор C22. Совместно R25 и C22 - времязадающая цепь узла стабилизации тока. При его падении ниже некоторого образцового уровня происходит зарядка конденсатора C22 через резистор R25. В интервале времени от начала зарядки до достижения напряжением на конденсаторе значения, заданного делителем напряжения R27R28, питание обмотки двигателя отключено, что препятствует быстрым флюктуациям тока около образцового значения.
Этот алгоритм в классическом смысле не относится к алгоритмам стабилизации тока “Fixed-Frequency PWM” или “Fixed-Off-Time PWM”, однако на практике он показал хорошую работоспособность. При превышении током образцового значения на выходе компаратора DA3.2 установлен низкий логический уровень. Микроконтроллер реагирует на это отключением обмотки одновременным закрыванием транзисторов VT1-VT4 с помощью сигнала SD, подаваемого на драйверы DA5 и DA6. Этим достигается быстрый спад тока в обмотках двигателя. В случае спада тока ниже образцового происходит обратное, на драйверы DA5 и DA6 поступает сигнал SD высокого уровня, открывающий упомянутые транзисторы, что не препятствует нарастанию тока в обмотке.
Смена ступеней образцового напряжения, а также смена комбинаций открытых и закрытых транзисторов моста происходит с приходом очередного импульса на вход "Шаг" по алгоритмам, зависящим от предустановленного коэффициента деления шага (наличия перемычек между контактами 1-2 и 3-4 разъёма XP1) и текущего направления вращения (логического уровня сигнала на входе "Напр."). Вход "Разр." был задуман для разрешения и запрета работы двигателя, но в прилагаемой к статье версии программы он не действует.
Драйвер выполнен на двухсторонней печатной плате, чертёж печатных проводников которой изображён на рис. 2, а расположение элементов - на рис. 3. Транзисторы VT1-VT8 расположены с одной стороны платы теплоотводящими поверхностями от неё. К этим поверхностям прижат через изоляционные прокладки теплоотвод - в простейшем случае алюминиевая пластина размерами 60х60 мм. Следует заметить, что при токе фаз более 4...5 А и длительном режиме работы теплоотвода в виде пластины может оказаться недостаточно и его поверхность следует увеличить, сделав теплоотвод ребристым или игольчатым.
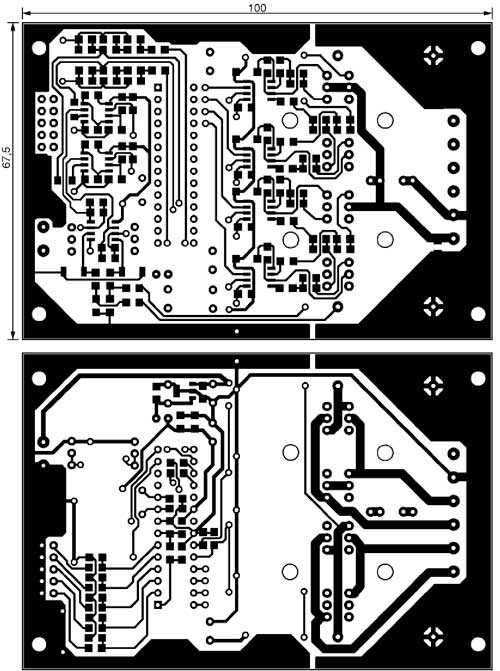
Рис. 2. Чертёж печатных проводников
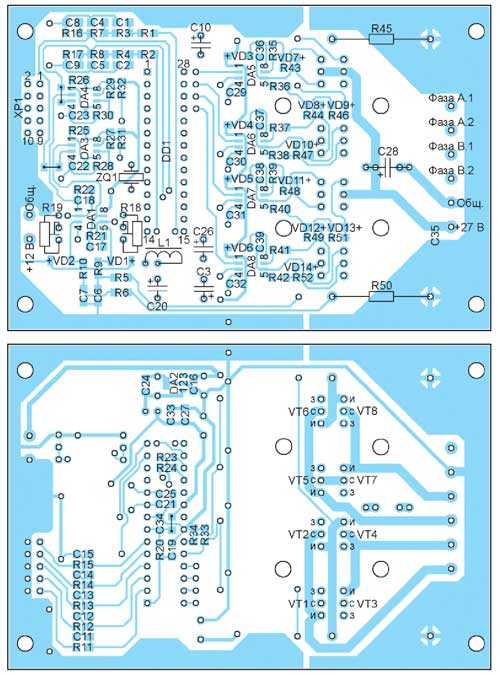
Рис. 3. Расположение элементов на плате
Материал платы следует выбрать толщиной не менее 1 ...1,5 мм, толщина фольги - не менее 35 мкм. Печатные проводники, по которым течёт большой ток, следует обильно залудить или бандажировать медной проволокой, припаяв её по всей длине проводника.
Большая часть компонентов конструкции применена в оформлении для поверхностного монтажа. Резисторы и конденсаторы - типоразмера 1206. Резисторы R45, R50 имеют проволочные выводы и мощность - не менее 2 Вт. оксидные конденсаторы в цепях питания - с малым ESR. Подстроечные резисторы R18 и R19 - многооборотные 3296W.
Амплитудные значения тока фаз двигателя регулируют подстроечными резисторами R18, R19. Проще всего это делать, переведя драйвер в режим микрошага 1/8 и контролируя цифровым вольтметром падение напряжения на резисторах-датчикахтока R45 и R50. Подавая на вход "Шаг" одиночные импульсы, добиваются максимальных значений тока поочерёдно в фазах А и В. Подстроечными резисторами устанавливают эти значения одинаковыми и соответствующими требуемой амплитуде тока. Уменьшение сопротивления под-строечных резисторов приводит к снижению тока, и наоборот. Для ориентировки можно воспользоваться табл. 1, в которой приведена зависимость амплитуды тока фазы Imф от введённого сопротивления подстроечного резистора.
Таблица 1
| Imф, A | 0,25 | 0,5 | 1,0 | 2,0 | 3,0 | 4,0 | 5,0 | 6,0 | 6.5 |
| R18, R19, кОм | 0,31 | 0,62 | 1,27 | 2,62 | 4,07 | 5,62 | 7,29 | 9,09 | 10,04 |
Перед включением драйвера следует установить перемычки между контактами 1-2 и контактами 3-4 разъёма XP1, обеспечивающие нужный коэффициент деления шага двигателя в соответствии с табл. 2. Программа анализирует состояние перемычек однократно в начале своей работы, дальнейшее изменение их состояния никакого влияния на работу драйвера не оказывает. Переключение коэффициента деления "на ходу" в предлагаемой версии программы не предусмотрено.
Таблица 2
| Перемычки на ХР1 | Коэффициент деления шага | |
| 1-2 | 3-4 | |
| Есть | Есть | 1/1 |
| Нет | Есть | 1/2 |
| Есть | Нет | 1/4 |
| Нет | Нет | 1/8 |
Программу микроконтроллера и файл печатной платы в формате Sprint Layout 6.0 можно скачать здесь.
Автор: М. Резников, г. Волчанск, Украина
Дата публикации: 21.09.2016
Мнения читателейНет комментариев. Ваш комментарий будет первый.
Вы можете оставить свой комментарий, мнение или вопрос по приведенному вышематериалу:
www.radioradar.net
Драйвер шагового двигателя A4988
Драйвер A4988 – предназначен для управления биполярными шаговыми двигателями, работающими от напряжения 8 – 35 В и потребляющими до 2 А на каждую обмотку двигателя. Драйвер построен на базе одноимённого чипа A4988 производства Allegro, он получил широкое распространение (в роботостроении, станках ЧПУ, 3D принтерах и т.д) благодаря простоте подключения и широкому функционалу.
Общие сведения:Как и в большинстве драйверов шаговых двигателей, силовая часть чипа A4988 представляет собой сдвоенный Н мост на полевых транзисторах, но больший интерес представляет логическая часть чипа. Драйвер позволяет выбирать размер шага: 1/1, 1/2, 1/4, 1/8 и 1/16 (подробно описано ниже, в разделе «выбор размера шага двигателя»). Чип оснащён множеством схем защит отключающих его при: перегреве, перегрузке по току, коротком замыкании и пониженном питании. Чип автоматически выбирает режим затухания тока (медленный / быстрый) и позволяет ограничивать максимальный выходной ток двигателя (настраивается подстроечным резистором, подробно описано ниже, в разделе «ограничение максимального тока двигателя»).
Назначение выводов драйвера:• «ENABLE» – Разрешение работы чипа («0» – разрешить работу, «1» – выключить чип).• «MS1» … «MS3» – Выбор размера шага (устанавливает кратность угла поворота двигателя за 1 шаг).• «RESET» – Перезагрузка логики чипа («0» – перезагрузить, «1» – обычный режим работы).• «SLEEP» – Перевод чипа в спящий режим («0» – сон, «1» – обычный режим работы).• «STEP» – Вход тактовых импульсов (за один импульс двигатель поворачивается на один шаг).• «DIR» – Выбор направления вращения двигателя («0» – в одну сторону, «1» – в другую сторону).• «VMOT» – Питание двигателя (8 … 35 В).• «VLOG» – Питание логики чипа (3 … 5,5 В).• «1A», «1B» – Подключение первой обмотки двигателя.• «2A», «2B» – Подключение второй обмотки двигателя.
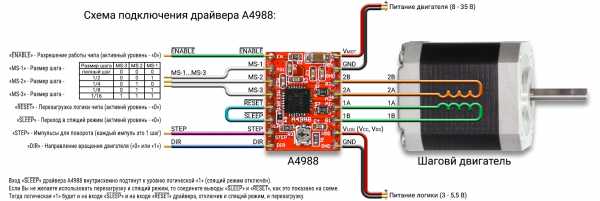
На шине питания двигателя (между выводами VMOT и GND) рекомендуется установить электролитический конденсатор, как можно ближе к плате драйвера. Ёмкость конденсатора должна быть не ниже 1000 мкФ, а его рабочее напряжение должно превышать напряжение в шине питания двигателя минимум на 25%.
Двигатель подключается следующим образом: провода первой обмотки подключаются к выводам 1A, 1B драйвера, провода второй обмотки подключаются к выводам 2A, 2B драйвера. Если вы перепутаете обмотки двигателя (1, 2) или перепутаете начало и конец обмотки (A, B) то двигатель всё равно будет работать. Если двигатель будет вращаться в другую сторону, то поменяйте местами начало и конец (A и B) одной из обмоток (1 или 2).
Если Вы не знаете какие провода двигателя являются окончанием его обмоток, то до подключения двигателя к драйверу, выполните следующие действия: плавно вращайте ротор двигателя, поочерёдно замыкая между собой по два разных провода двигателя. Как только вы почувствуете что ротор стало тяжелее вращать, значит два замкнутых провода являются окончанием одной обмотки. Следовательно остальные два провода, являются окончанием второй обмотки.
Почему на схеме соединены выводы «RESET» и «SLEEP» драйвера? Дело в том, что вход «SLEEP» драйвера A4988 внутрисхемно подтянут к уровню логической «1» (спящий режим отключён), а вход «RESET» не подтянут к «1» и не прижат к «0». Соединение выводов «SLEEP» и «RESET» приведёт к тому, что логическая «1» со входа «SLEEP» попадёт и на вход «RESET» драйвера (тот же результат можно достичь просто подав «1» на вход «RESET»). Значит и спящий режим, и перезагрузка, будут отключены, и недоступны.
Примечание:• Подключение и отключение двигателя от выводов «1A», «1B», «2A», «2B» при наличии питания двигателя VMOT может вывести драйвер из строя.• У платы драйвера по 8 выводов с каждой стороны, если подключить питание перепутав стороны платы (повернуть плату драйвера на 180°), то она точно выйдет из строя.
Управление двигателем:Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Один оборот ротора (360°) состоит из определённого количества шагов. Количество полных шагов в одном обороте указывается в технической документации двигателя.
Управление шаговым двигателем осуществляется через входы «ENABLE», «STEP» и «DIR» драйвера (если считать, что выводы «RESET» и «SLEEP» соединены как на схеме). Подача логического «0» на вход «ENABLE» разрешает работу драйвера. С каждым фронтом импульса на входе «STEP», ротор двигателя будет поворачиваться на один шаг, направление поворота которого будет зависеть от логического уровня на входе «DIR».
Пример для двигателя 17HS1352-P4130 в полношаговом режиме:• Для разрешения работы драйвера, необходимо установить уровень логического «0» на входе «ENABLE» (так как вход инверсный).• У двигателя 17HS1352-P4130, один оборот ротора состоит из 200 полных шагов, значит за один полный шаг ротор повернётся на 1,8° (360° / 200 шагов).• Если подать на вход «STEP» 400 импульсов, при наличии логической «1» на входе «DIR», то ротор двигателя совершит два полных оборота в одну сторону.• Если подать на вход «STEP» 400 импульсов, при наличии логического «0» на входе «DIR», то ротор двигателя совершит два полных оборота в другую сторону.• Чем выше частота следования импульсов на входе «STEP», тем быстрее будет осуществляться поворот ротора.• Если работа драйвера разрешена (на входе «ENABLE» уровень логического «0») и на вход «STEP» не поступают импульсы, то ротор двигателя будет удерживаться в одном и том же положении, вне зависимости от уровня на входе «DIR». Удержание ротора означает что его трудно (или невозможно) повернуть прикладывая внешнюю физическую силу.• При подаче логической «1» на вход «ENABEL», драйвер отключится и ротор двигателя освободится, вне зависимости от состояния на остальных входах драйвера.
Примечание:Входы «STEP» и «DIR» не имеют внутрисхемной подтяжки к «1» или «0». Значит их нельзя оставлять не подключёнными.
Выбор размера шага двигателя:В предыдущем разделе указано, что один оборот ротора осуществляется за определённое количество шагов. Но шаговыми двигателями можно управлять не только в полношаговом режиме (1 шаг за такт), а еще и в полушаговом (1/2 шага за такт), и микрошаговом (1/4, 1/8, 1/16 … шага за такт).
Например, ротор двигателя 17HS1352-P4130 совершит полный оборот (360°) за:• 200 шагов в полношаговом режиме (1,8° за такт)• 400 шагов в полушаговом режиме = 1/2 шага (0,9° за такт)• 800 шагов при размере шага 1/4 (0,45° за такт)• 1600 шагов при размере шага 1/8 (0,225° за такт)• 3200 шагов при размере шага 1/16 (0,1125° за такт)
Чем больше шагов в полном обороте ротора двигателя, тем плавнее он вращается, но при этом уменьшается крутящий момент (сила вращения).
Драйвер A4988 позволяет выбрать 1 из 5 вариантов размера шага двигателя. Выбор размера шага осуществляется установкой логических уровней на входах драйвера MS3, MS2, MS1, в соответствии с таблицей:
| Полношаговый режим | 0 | 0 | 0 |
| 1/2 шага | 0 | 0 | 1 |
| 1/4 шага | 0 | 1 | 0 |
| 1/8 шага | 0 | 1 | 1 |
| 1/16 шага | 1 | 1 | 1 |
Примечание:Входы MS3, MS2 и MS1 драйвера, внутрисхемно прижаты к GND (через сопротивления в несколько десятков кОм). Так что если их оставить не подключёнными, то драйвер будет работать в полношаговом режиме.
Ограничение максимального тока двигателя:Если на двигатель подать напряжение выше его номинального значения, это приведёт к увеличению скорости шага. Но увеличение напряжения приведёт и к увеличению силы тока, а превышение максимального тока двигателя, выведет его из строя.
Но драйвер A4988 позволяет ограничивать максимальный выходной ток двигателя (настраивается подстроечным резистором на плате драйвера). Таким образом можно увеличить напряжение в сети питания двигателя, предварительно ограничив выходной ток, по следующей формуле:
IMAX = VREF * 8 * RSENSE, следовательно, VREF = IMAX / (8 * RSENSE) где:
- IMAX – максимальный ток выдаваемый драйвером (не должен превышать номинальный ток двигателя).
- VREF – опорное напряжение (регулируется подстроечным резистором).Это напряжение можно измерить между любым выводом GND и центральным выводом подстроечного резистора (металлическая вращающая часть).
- RSENSE – токочувствительное сопротивление (номинал указан на корпусе резистора, см. картинку ниже).Надпись на резисторе «R200» значит, что его сопротивление равно 0,200 Ом = 0,2 Ом.Надпись на резисторе «R100» значит, что его сопротивление равно 0,100 Ом = 0,1 Ом.Надпись на резисторе «R050» значит, что его сопротивление равно 0,050 Ом = 0,05 Ом.
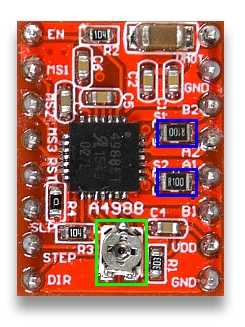 |
Расположение деталей на плате драйвера:Синим цветом обведены токочувствительные резисторы RSENSE = 0,1 Ом. Так как драйвер ограничивает токи в двух обмотках двигателя, то и резисторов RSENSE на плате, тоже два.Зелёным цветом обведён подстроечный резистор, для регулировки опорного напряжения VREF. |
В представленной выше формуле, значения IMAX (номинальный ток двигателя) и RSENSE(токочувствительное сопротивление) являются константами, а единственный параметр который можно менять, это опорное напряжение VREF. Настройка опорного напряжения VREF осуществляется подстроечным резистором, без подачи питания двигателя VMOT. Состояния на входах «ENABLE», «STEP», «DIR», «MS-3», «MS-2», «MS-1» драйвера, не влияют на настройку опорного напряжения VREF(если их логические уровни не меняются во время настройки). Настройку можно выполнять даже при отключённом от драйвера двигателе.
Пример:Настройка ограничения максимального тока для двигателя с номинальным током в 1 А.IMAX = 1 А.RSENSE = 0,1 Ом.V<sub “=””>REF = I<sub “=””>MAX / (8 * R<sub “=””>SENSE) = 1 / (8 * 0,1) = 1,25 В.Подаём питание логической части драйвера VLOG. Не подаём питание двигателя VMOT. Подключаем вольтметр черным щупом к любому выводу GND, а красным щупом к центральному выводу подстроечного резистора (металлическая вращающая часть). Поворачивая вращающуюся часть подстроечного резистора, добиваемся показаний на вольтметре = 1,25 В. Теперь можно подать питание двигателя VMOT. Ток протекающий через его обмотки не будет превышать 1 А.
Примечание:Обратите внимание на картинку ниже, на ней показаны токи протекающие через обмотки двигателя в различных режимах размера шага. Если Ваш двигатель будет работать в полношаговом режиме, то максимальный ток будет ограничен 70,71% от установленного IMAX. Значит для полношагового режима работы это нужно учесть при расчёте IMAX. Так для приведенного выше примера, в полношаговом режиме работы, IMAX должен быть равен 1 А * 100 / 70,71 = 1A / 0,7071 = 1,41 A. Следовательно VREF = 1,41 / (8 * 0,1) = 1,7625 В. Но это только для полношагового режима работы двигателя.
Питание:• Напряжение питания логической части драйвера, от 3 до 5,5 В постоянного тока, подаётся на выводы GND и VLOG.• Напряжение питания двигателя, от 8 до 35 В постоянного тока, подаётся на выводы GND и VMOT.
Спецификация:• Напряжение питания двигателя: 8 … 35 В.• Максимальный ток на одну обмотку двигателя: 1 А без радиатора, (2 А с радиатором)*.• Напряжение питания логической части драйвера: 3 … 5,5 В.• Размер одного шага двигателя: от 1 до 1/16 полного шага.• Защита: от перегрева, от перегрузки по току, от короткого замыкания, от пониженного питания.• Габариты платы драйвера: 20×15 мм.• Габариты радиатора: 9x5x9 мм.
Примечание:Чип A4988 может работать с выходным током до 2 А при наличии радиатора. Но выходной ток ограничивается напряжением V<sub “=””>REF которое снимается с подстроечного резистора на плате драйвера. Максимальное значение V<sub “=””>REF зависит от номиналов подстроечного резистора, и резистора R1 который входит в состав резистивного делителя. Производители устанавливают на платах резисторы различных номиналов, следовательно, максимальный ток для разных плат может отличаться. Для платы указанной на картинке, максимальное значение V<sub “=””>REF = 1,35 В, следовательно максимальный выходной ток (IMAX) = VREF * 8 * RSENSE = 1,35 * 8 * 0,1 = 1,08 А.
Комплектация:• 1x Драйвер A4988.• 1x Радиатор.
xn----7sbhgu4ahbanfnng.xn--p1ai







Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






