
Асинхронный электродвигатель постоянного тока 220В и 380В.
Электродвигатель – машина, преобразовывающая энергию электромагнитного поля во вращательное движение (электрический двигатель). Это, пожалуй, наиболее гениальное изобретение, позволившее человечеству сделать цивилизационный скачок в индустриальное общество. Коэффициент его полезного действия составляет 95-98 процентов.
Основа принципа действия
В основе принципа действия любого электрического двигателя лежит феномен электромагнитной индукции. Если скрутить любой проводник в кольцо и через него протащить магнит, то в нем возникнет электрический ток, направление течения которого будет противоположно движению магнита. Верно и обратное: прохождение электричества через проводник вызывает индуцирование ЭДС в металлическом стержне.
Этот эффект был открыт в 1832 году английским физиком Майклом Фарадеем, создавшим прибор, состоящий из постоянного магнита и бронзового диска, помещенного между его полюсами. При вращении диска с подключенных к нему проводов снималось небольшое напряжение и переменный ток большой силы. Поэтому диск Фарадея называют еще и униполярным генератором, который при всей архаичности конструкции до сих пор используется. Например, в установках ТОКАМАК для разогрева плазмы и рельсотронах – разновидности оружия.
При вращении диска с подключенных к нему проводов снималось небольшое напряжение и переменный ток большой силы. Поэтому диск Фарадея называют еще и униполярным генератором, который при всей архаичности конструкции до сих пор используется. Например, в установках ТОКАМАК для разогрева плазмы и рельсотронах – разновидности оружия.
Электрический двигатель постоянного тока
Если к диску Фарадея подключить гальваническую батарею, то он совершит один оборот – до того момента, как совпадут разноименные полюса – ее и магнита. Электродвигатель постоянного тока в своей работе использует эффект отталкивания одноименных полюсов магнита. Чтобы вращение стало непрерывным, на его роторе закреплено особое устройство (коллектор) – кольцо из металла, поделенное на сектора диэлектриком.
Питающее напряжение подводится к коллектору посредством скользящих контактов – щеток. Когда вал машины поворачивается, сектора коллектора меняются местами и полюса остаются разноименными.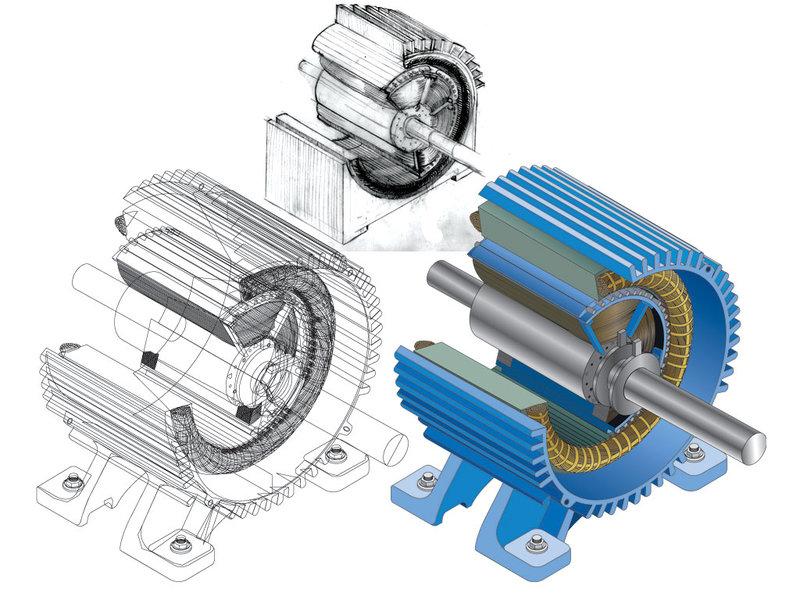 Поэтому вращение продолжается. Скорость вращения ротора машин постоянного тока зависит от количества обмоток на нем. Каждая из них представляет собой своеобразный диск Фарадея и подключена к своей паре пластин коллектора.
Поэтому вращение продолжается. Скорость вращения ротора машин постоянного тока зависит от количества обмоток на нем. Каждая из них представляет собой своеобразный диск Фарадея и подключена к своей паре пластин коллектора.
Если ее мощность электрической машины невелика, то статорные магниты делают из природного металла с соответствующими свойствами. В промышленных машинах постоянного тока используются электромагниты – катушки из проводников. Они питаются тем же напряжением, что и катушки ротора.
Двигатели переменного тока
Конструкция электродвигателя переменного потом электроэнергии выглядит как бы вывернутой наизнанку по отношению к машинам постоянного тока. Питающее напряжение в нем подводится к статорным обмоткам, а принцип действия основан не на отталкивании одноименных полюсов магнита, а на притягивании имеющих противоположный знак.
Магнитное поле статора машины переменного тока вращается. Этот феномен возникает в результате сложения векторов магнитной индукции нескольких переменных токов, фазы синусоид которых сдвинуты друг относительно друга на некоторый угол – 900, если питание двухфазное, и 600 при трехфазном напряжении. Величины углов объясняются просто: отдельная обмотка генератора переменного тока состоит из двух катушек, а на статоре они расположены диаметрально противоположно. Если поделить 3600 на четыре (две обмотки) или на шесть (три обмотки), то получим исходные значения.
Этот феномен возникает в результате сложения векторов магнитной индукции нескольких переменных токов, фазы синусоид которых сдвинуты друг относительно друга на некоторый угол – 900, если питание двухфазное, и 600 при трехфазном напряжении. Величины углов объясняются просто: отдельная обмотка генератора переменного тока состоит из двух катушек, а на статоре они расположены диаметрально противоположно. Если поделить 3600 на четыре (две обмотки) или на шесть (три обмотки), то получим исходные значения.
Магнитное поле ротора индуцируется энергией в статорных обмотках и имеет два свойства:
- Оно противоположно статорному по знаку.
- Отстает от статорного, поскольку на его индукцию требуется некоторое время, а сам ротор имеет физический вес и по этой причине обладает моментом инерции.
Полюса магнитного поля ротора стремятся притянуться к противоположным полюсам статорного, но эта своеобразная погоня никогда не может закончиться по двум причинам:
- Линейная скорость ротора ниже из-за разницы в размерах.

- Существуют потери энергии в воздушном зазоре между деталями машины.

Угол рассогласования между ротором и статором достигает 180, из-за его наличия электродвигатели переменного электричества называют асинхронными.
Наиболее распространенной конструкцией является электрическая машина, обмотка ротора которой состоит из нескольких проводников, замкнутых двумя металлическими кольцами. По форме она похожа на так называемое беличье колесо. Таковы все общепромышленные электродвигатели. Они просты, но имеют неустранимый недостаток: большие пусковые токи, которые приводят к перегрузкам в сети и авариям.
Двигатели с фазным ротором запускаются плавно, без перегрузок, но они сложны и дороги. Применяются для обеспечения больших тяговых усилий. Например, в крановом оборудовании или на электротранспорте.
Видео — как работает Электродвигатель:
 youtube.com/embed/0BVSlqE7jZc?feature=oembed» frameborder=»0″ allowfullscreen=»»>
youtube.com/embed/0BVSlqE7jZc?feature=oembed» frameborder=»0″ allowfullscreen=»»>
Как правильно эксплуатировать электродвигатель
Асинхронный электродвигатель на сегодня является наиболее широко используемым двигателем в промышленности и строительстве. Чтобы устройство было всегда в форме и не пришлось его отправлять на свалку в результате преждевременного износа, хорошие хозяева проявляют заботу о нём и эксплуатируют правильно. В этой статье мы обсудим, как правильно эксплуатировать электродвигатель во избежание возникновения неполадок при его работе.
Условия работы электрического двигателя
Электрический двигатель будет в полной мере соответствовать характеристикам, указанным в паспорте, если его, прежде всего, правильно установить и использовать. Условия обеспечения номинальных параметров двигателем следующие:
— колебания напряжения питающей сети электрического тока, к которой подключен агрегат, не должны превышать 5% от номинала;
— максимально допустимая температура воздуха, окружающего конструкцию, должна быть не более +350 С;
— во избежание перегрузки мотора необходимо следить за показаниями амперметра, не допуская увеличения силы тока более 5% от номинала;
— корпус устройства надежно следует заземлить и регулярно проверять сопротивления заземления;
— конструктивные элементы, изготовленные из коррозируемых материалов, необходимо покрыть краской. Коррозия всегда начинается на поверхности металла, а затем распространяется вглубь, ухудшая механические свойства материала;
Коррозия всегда начинается на поверхности металла, а затем распространяется вглубь, ухудшая механические свойства материала;
— кабельные сети, по которым поступает питающее напряжение, следует надёжно изолировать и защитить от случайных механических повреждений. Подключение выполнить напрямую к контактным зажимам двигателя, находящимся в коробке.
Элементарные правила эксплуатации в отношении своего двигателя
Правильная эксплуатация электродвигателя обеспечивает его надёжную работу в течение всего установленного ресурса. До включения устройства в работу обязательно проверить:
— чистоту и отсутствие ненужных предметов на корпусе и рядом;
— состояние заземления;
— качество крепления статора.
Первый запуск электродвигателя лучше доверить специалисту, который будет обслуживать все движущиеся механизмы.
Рекомендации по эксплуатации асинхронных электродвигателей:
-
У работающего двигателя основные электрические и механические показатели должны быть следующими:
— температура нагрева статора не более 900 С;
— вибрация в пределах нормы, а именно в соответствии с количеством оборотов двигателя;
— вращение ротора бесшумное, без скачков;
— установленная заводом-изготовителем величина нагрузки;
— отсутствие искрения щёток у коллекторных двигателей.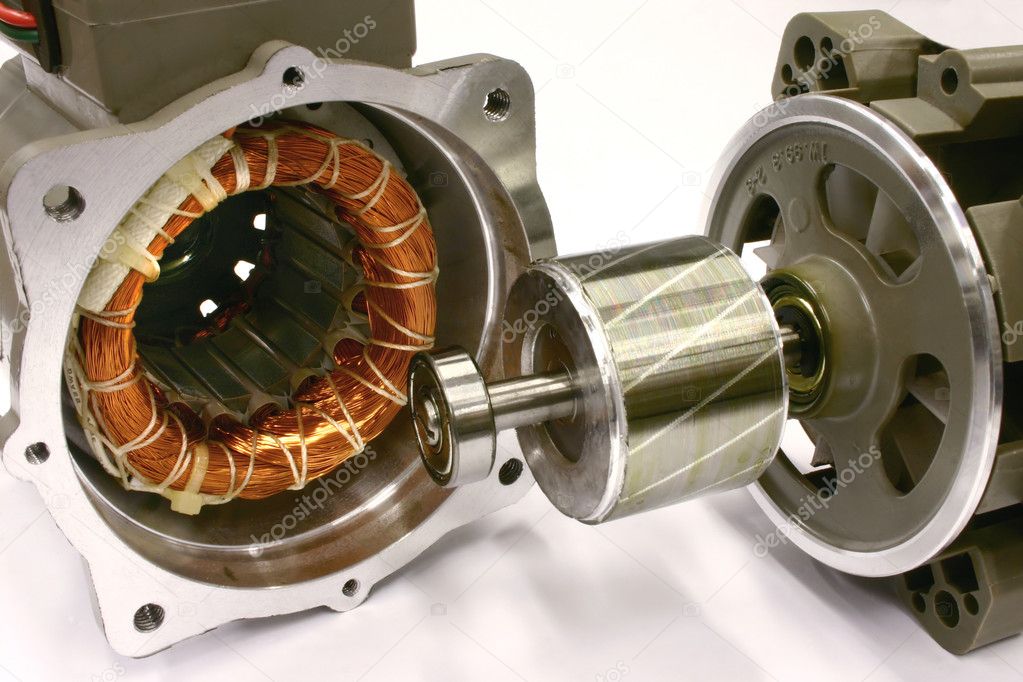
-
Защита электрических цепей осуществляется плавкими вставками. Значение тока по номиналу пишется на вставке. -
Аварийное отключение электродвигателя производится в следующих случаях:
— появился сильный запах горения, дым, искры, огонь;
— повышенный уровень вибрации, из-за которого возможно разрушение двигателя;
— выход из строя электропривода;
— резкое снижение оборотов и повышенный нагрев.
Владелец также обязан планировать профилактические ремонты, которые повышают надёжность оборудования.
Некоторые двигатели используются крайне редко. Как поступать в этом случае? Рекомендуется постоянно осматривать, проверять сопротивление изоляции и запускать устройства, что позволит при необходимости без промедления их использовать.
Вывод
Конструкция асинхронного электродвигателя простая и надёжная. И, если соблюдать правила эксплуатации, в том числе не превышать основные электрические и механические параметры, установленные изготовителем, то срок его службы можно будет увеличить.
И, если соблюдать правила эксплуатации, в том числе не превышать основные электрические и механические параметры, установленные изготовителем, то срок его службы можно будет увеличить.
Электродвигатели
Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
Замена двигателей постоянного тока на асинхронные двигатели переменного тока
Замена двигателей постоянного тока на асинхронные двигатели переменного тока
Промышленные двигатели постоянного тока начали выпускаться в 1860—1870 гг., чему предшествовал 30-летний период их разработки после фундаментальных открытий М. Фарадея (закона электромагнитной индукции и превращения электрической энергии в механическую).
Двигатели постоянного тока широко применяются и в наше время благодаря использованию современных тиристорных преобразователей, которые позволяют осуществлять регулирование скорости данных двигателей путем изменения напряжения на якоре или в обмотках возбуждения. Для расширения диапазона регулирования скорости используются различные сигналы обратной связи (напряжение на якоре, тахогенераторы и т.д.). Однако эксплуатация двигателей постоянного тока влечет за собой ряд значительных неудобств, связанных с конструктивными особенностями машин данного типа, а именно:
Для расширения диапазона регулирования скорости используются различные сигналы обратной связи (напряжение на якоре, тахогенераторы и т.д.). Однако эксплуатация двигателей постоянного тока влечет за собой ряд значительных неудобств, связанных с конструктивными особенностями машин данного типа, а именно:
1. Сложность конструкции и, как результат, высокая цена
2. Наличие щеточно-коллекторного узла
3. Большая масса
4. Необходимость в периодическом обслуживании
Все эти недостатки требуют существенных затрат при покупке машин постоянного тока и их дальнейшей эксплуатации, а так же они могут значительно снизить надежность и точность систем в целом. Необходимо планировать дополнительные планово-предупредительные работы и останавливать производство для обслуживания щеточно-коллекторных узлов и проводить периодическую продувку машин от пыли.
До недавнего времени внедрение асинхронных двигателей (АД) с короткозамкнутыми роторами в системы, где требуется широкий диапазон регулирования скорости, не представлялось возможным, а для изменения скорости движения приводимых механизмов использовались переключаемые редукторы или вариаторы. Дальнейшим развитием таких систем стало появление асинхронных двигателей с переключением числа полюсов (двух и трех скоростные двигатели), что позволяло ступенчато изменять скорость вращения.
Дальнейшим развитием таких систем стало появление асинхронных двигателей с переключением числа полюсов (двух и трех скоростные двигатели), что позволяло ступенчато изменять скорость вращения.
С развитием полупроводниковой электроники (разработка IGBT транзисторов), появилась возможность производства недорогих микропроцессорных преобразователей частоты, с помощью которых стало возможным полноценно управлять скоростью асинхронных двигателей в широком диапазоне регулирования (1:1000). Теперь частота вращения АД не зависит от частоты питающей сети, двигатели можно разгонять выше их номинальной скорости. Так же появилась возможность управления моментом асинхронных двигателей. Системы управления движением с использованием асинхронных двигателей и преобразователей частоты, получаются дешевле и проще подобных систем с двигателями постоянного тока. В качестве датчиков обратной связи широко используются цифровые устройства (энкодеры), которые менее подвержены влиянию электромагнитных помех, чем тахогенераторы, классически используемые с машинами постоянного тока.
Асинхронный двигатель – простая, недорогая, не требующая обслуживания машина. Именно эти аргументы привели к тому, что на многих предприятиях машины постоянного тока с тиристорными преобразователями стали заменять на асинхронные двигатели с системами управления, построенными на преобразователях частоты.
При подборе асинхронного двигателя взамен машины постоянного тока необходимо учитывать разность характеристик этих машин. Подбор двигателя осуществляется по следующим параметрам:
1. По номинальной скорости вращения
Диапазон изменения частоты вращения вала асинхронного двигателя должен быть равен или больше чем у двигателя постоянного тока.
2. По моменту (номинальному, пусковому, максимальному)
Номинальный момент асинхронного двигателя должен быть равен или быть больше исходного при условии длительной работы в заданном диапазоне частот вращения без перегрева. Максимальный и пусковой моменты должны быть равны или быть больше пускового момента определенного для данного механизма.
На рисунке 1 и 2 представлены механические характеристики асинхронного двигателя и двигателя постоянного тока соответственно. Как видно, на малых скоростях асинхронный двигатель имеет момент значительно меньше номинального в отличие от двигателя постоянного тока. Поэтому при замене двигателя постоянного тока необходимо однозначно определить диапазон скорости вращения вала и требуемый момент в этом диапазоне. Как правило, для удовлетворения механических характеристик приводного механизма, приходится ставить асинхронный двигатель большей мощности.
Рис.1 Механическая характеристика асинхронного двигателя
Рис.2 Механическая характеристика двигателя постоянного тока
3. По режиму работы
Нагрев электрической машины зависит от режима ее работы, т.е. от соотношения длительности периодов работы и пауз между ними, или периодов работы с полной или частичной нагрузкой, от частоты включения машины и характера протекания переходных процессов.
Подразделяют следующие режимы работы:
Продолжительный режим (S1) — режим при котором время работы машины при практически неизменных нагрузке и температуре окружающей среды достаточно для нагрева всех ее частей до практически установившейся температуры. Режим характеризуется неизменными потерями в течение всего времени работы машины.
Кратковременный режим (S2) — режим при котором периоды неизменной нагрузки чередуются с периодами отключения машины, причем за время работы температура частей машины не успевает достигнуть установившегося значения, а за время пауз машина охлаждается до холодного состояния.
Повторно-кратковременный режим (S3-S8) — отличается от кратковременного регламентированными продолжительностью включения под неизменную нагрузку и продолжительностью периодов отключения, причем время работы машины всегда меньше времени, необходимого для нагрева ее частей до установившейся температуры, а время пауз меньше необходимого для остывания машины до практически холодного состояния. Отличие между режимами S3-S8 заключается частотой пусков и продолжительностью включения машины.
Отличие между режимами S3-S8 заключается частотой пусков и продолжительностью включения машины.
4. По условиям эксплуатации
Согласно ГОСТ 17498-87 асинхронный двигатель должен иметь соответствующую степень защиты IPXX, где первый символ X означает степень защиты оболочкой, от проникновения инородных твердых тел, второй символ X означает степень защиты оболочкой от вредных воздействий проникающей воды. Например, IP54 — “Машина не полностью защищена от проникновения внутрь оболочки пыли (однако, пыль не может проникать в количестве, достаточном для нарушения работы изделия) и воды, разбрызгиваемой на оболочку в любом направлении”.
По всем вопросам, касательно данного применения обращайтесь в ООО «Драйвика» по тел. 8 (812) 635 90 30 или Email: [email protected]
Электродвигатель постоянного тока: принцип работы и действия, устройство, характеристики
Сейчас невозможно представить нашу жизнь без электродвигателей. Они приводят в действие станки, бытовую технику и инструменты, поезда, трамваи и троллейбусы, компьютеры, игрушки и разные подвижные механизмы, устанавливаются на производственных станках, если частоту вращения рабочего вала требуется регулировать в широком диапазоне. Агрегаты для преобразования электрической энергии в механическую представлены множеством видов и моделей (синхронные, асинхронные, коллекторные и т.д.). Из этой статьи вы узнаете, что такое электродвигатель постоянного тока, его устройство и принцип действия.
Они приводят в действие станки, бытовую технику и инструменты, поезда, трамваи и троллейбусы, компьютеры, игрушки и разные подвижные механизмы, устанавливаются на производственных станках, если частоту вращения рабочего вала требуется регулировать в широком диапазоне. Агрегаты для преобразования электрической энергии в механическую представлены множеством видов и моделей (синхронные, асинхронные, коллекторные и т.д.). Из этой статьи вы узнаете, что такое электродвигатель постоянного тока, его устройство и принцип действия.
Краткая история создания
Разные ученые пытались создать экономичный и мощный двигатель еще с первой половины 19 века. Основой послужило открытие М.Фарадея, сделанное в 1821 г. Он обнаружил, что помещенный в магнитное поле проводник вращается. Отталкиваясь от этого, в 1833 г изобретатель Томас Дэвенпорт смог сконструировать двигатель постоянного тока, а позже, в 1834 г, ученый Б.С.Якоби придумал прообраз современной модели двигателя с вращающимся валом.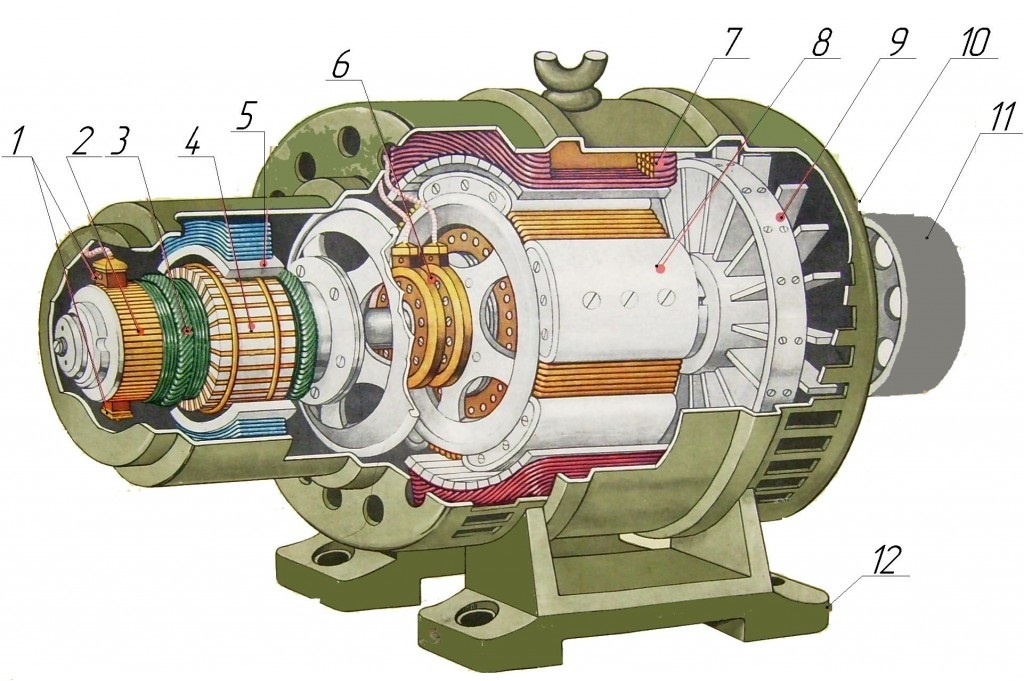 Устройство, более похожее на современные агрегаты, появилось в 1886 г, и до сегодняшнего дня электродвигатель продолжает совершенствоваться.
Устройство, более похожее на современные агрегаты, появилось в 1886 г, и до сегодняшнего дня электродвигатель продолжает совершенствоваться.
Принцип действия электродвигателя постоянного тока
На мысль о создании двигателя ученых натолкнуто следующее открытие. Помещенная в магнитное поле проволочная рамка с пропущенным по ней током начинает вращаться, создавая механическую энергию. Принцип действия электродвигателя постоянного тока основывается на взаимодействии магнитных полей рамки и самого магнита. Но одна рамка после определенного количества вращений замирает в положении, параллельном внешнему магнитному полю. Для продолжения движения необходимо добавить вторую рамку и в определенный момент переключить направление тока.
Вместо рамок в двигателе используется набор проводников, на которые подается ток, и якорь. При запуске вокруг него возбуждается магнитное поле, взаимодействующее с полем обмотки. Это заставляет якорь повернуться на определенный угол. Подача тока на следующие проводники приводит к следующему повороту якоря, и далее процесс продолжается.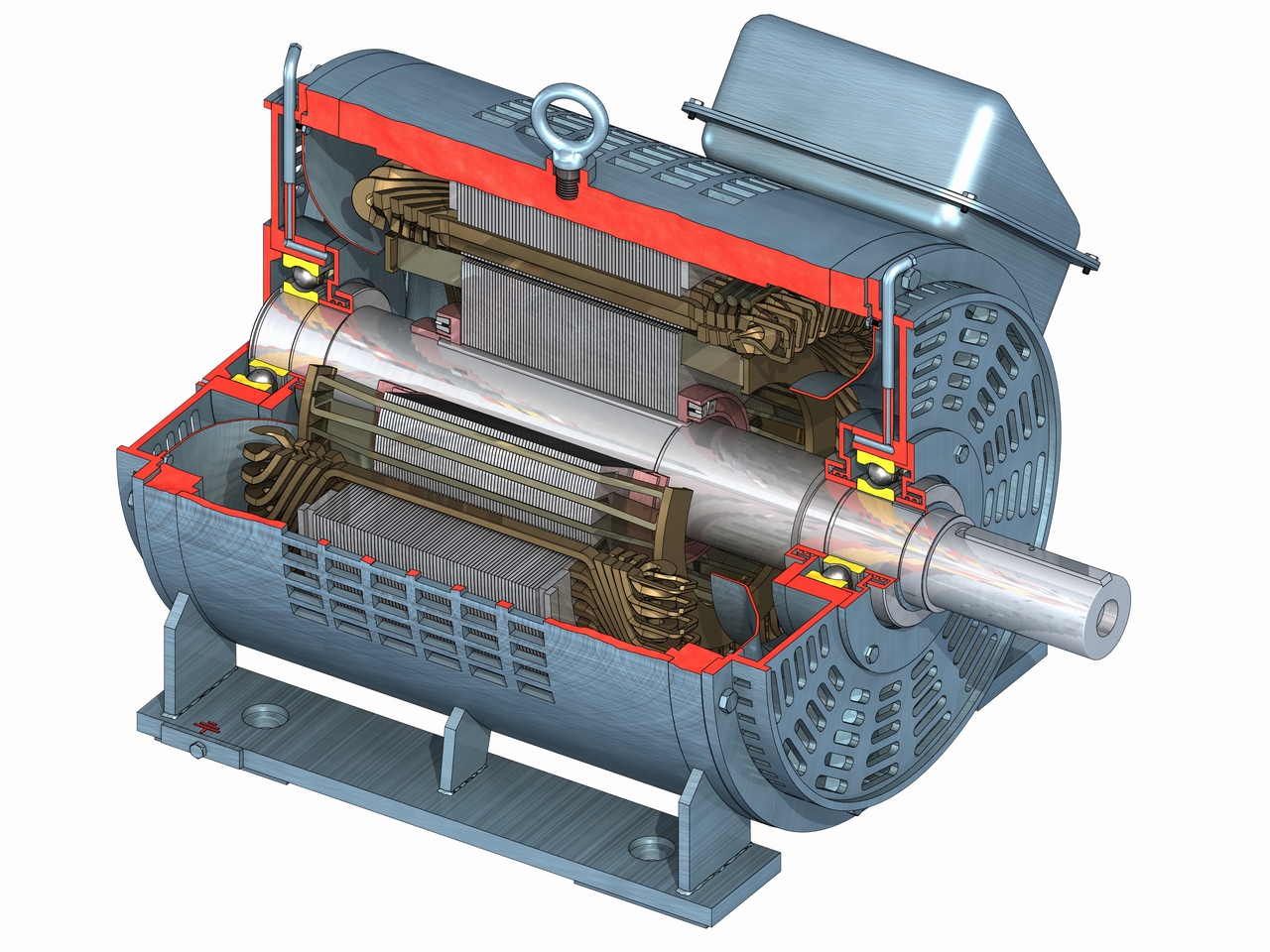
Магнитное поле создается либо с помощью постоянного магнита (в маломощных агрегатах), либо с помощью индуктора/обмотки возбуждения (в более мощных устройствах).
Попеременную зарядку проводников якоря обеспечивают щетки, сделанные из графита или сплава графита и меди. Они служат контактами, замыкающими электрическую сеть на выводы пар проводников. Изолированные друг от друга выводы представляют собой кольцо из нескольких ламелей, которое находится на оси вала якоря и называется коллекторным узлом. Благодаря поочередному замыканию ламелей щетками двигатель вращается равномерно. Степень равномерности работы двигателя зависит от количества проводников (чем больше, тем равномернее).
Устройство электродвигателя постоянного тока
Теперь, когда вы знаете, как работает электродвигатель постоянного тока, пора ознакомиться с его конструкцией.
Как и у других моделей, основу двигателя составляют статор (индуктор) – неподвижная часть, и якорь вкупе с щеточноколлекторным узлом – подвижная часть. Обе части разделены воздушным зазором.
Обе части разделены воздушным зазором.
В состав статора входят станина, являющаяся элементом магнитной цепи, а также главные и добавочные полюса. Обмотки возбуждения, необходимые для создания магнитного поля, находятся на главных полюсах. Специальная обмотка, улучшающая условия коммутации, расположена на добавочных полюсах.
Якорь представляет собой узел, состоящий из магнитной системы (она собрана из нескольких листов), набора обмоток (проводников), уложенных в пазы, и коллектора, который подводит постоянный ток к рабочей обмотке.
Коллектор имеет вид цилиндра, собранного из изолированных медных пластин. Он насажен на вал двигателя и имеет выступы, к которым подходят концы секций обмотки якоря. Щетки снимают ток с коллектора, входя с ним в скользящий контакт. Удержание щеток в нужном положении и обеспечение их нажатия на коллектор с определенной силой осуществляется щеткодержателями.
Многие модели двигателей оснащены вентилятором, задача которого – охлаждение агрегата и увеличение продолжительности рабочего периода.
Особенности и характеристики электродвигателя постоянного тока
Эксплуатационные характеристики электродвигателя постоянного тока позволяют широко использовать это устройство в самых разных сферах – от бытовых приборов до транспорта. К его преимуществам можно отнести:
- Экологичность. При работе не выделяются вредные вещества и отходы.
- Надежность. Благодаря довольно простой конструкции он редко ломается и служит долго.
- Универсальность. Он может использоваться в качестве как двигателя, так и генератора.
- Простота управления.
- Возможность регулирования частоты и скорости вращения вала – достаточно подключить агрегат в цепь переменного сопротивления.
- Легкость запуска.
- Небольшие размеры.
- Возможность менять направление вращения вала. В двигателе с последовательным возбуждением нужно изменить направление тока в обмотке возбуждения, во всех остальных типах – в якоре.
Как и любое устройство, электродвигатели постоянного тока имеют и «слабые стороны»:
- Их себестоимость, следовательно, и цена достаточно высока.
- Для подключения к сети необходим выпрямитель тока.
- Самая уязвимая и быстроизнашивающаяся деталь – щетки – требует периодической замены.
- При сильной перегрузке может случиться возгорание. Если соблюдать правила эксплуатации, такая возможность исключена.

Но, как видите, достоинства явно перевешивают, поэтому на данный момент электродвигатель является одним из наиболее экономичных и эффективных устройств. Зная устройство и принцип работы электродвигателя постоянного тока, вы сможете самостоятельно собрать и разобрать его для техосмотра, чистки или устранения неисправностей.
Асинхронные двигатели | Электротехника и электрооборудование
Страница 5 из 39
РАЗДЕЛ ВТОРОЙ
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Электрические машины, действия которых основаны на электромагнитных явлениях и которые служат для преобразования механической энергии в электрическую, называют электромашинный и генераторами, а преобразующие электрическую энергию в механическую — электродвигателями.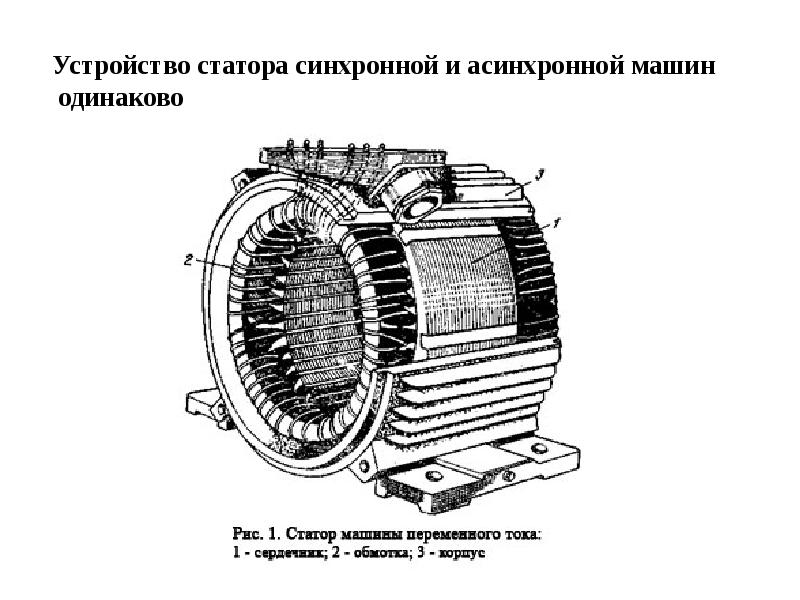 Применяют также электрические машины для преобразования электрической энергии одних параметров в другие, которые называют преобразователями. Преобразовываться могут: род тока, частота, напряжение, число фаз и другие параметры электроэнергии.
Применяют также электрические машины для преобразования электрической энергии одних параметров в другие, которые называют преобразователями. Преобразовываться могут: род тока, частота, напряжение, число фаз и другие параметры электроэнергии.
Электрические генераторы приводятся во вращение паровыми и водяными турбинами, двигателями внутреннего сгорания и др. Электродвигатели служат для приведения в действие станков, различных машин, транспортного оборудования и др. К электрическим машинам часто относят также трансформаторы — статические аппараты, не имеющие движущихся частей, но по своему устройству и принципу действия имеющие много общего с электрическими машинами. Электрические машины обладают свойством обратимости, т. е. могут работать генератором, если их вращать каким-либо двигателем или если к ним подводить электроэнергию, могут использоваться как электродвигатели. Однако при проектировании электромашин учитывают требования, предъявляемые особенностями их работы генератором или электродвигателем. Электрические машины подразделяются на машины переменного тока и машины постоянного тока. Электрические машины переменного тока разделяют на синхронные, асинхронные и коллекторные. Наибольшее применение имеют синхронные генераторы переменного трехфазного тока и трехфазные асинхронные электродвигатели. Коллекторные электродвигатели переменного тока имеют ограниченное применение вследствие сложности устройства, обслуживания и более высокой стоимости. Основным их преимуществом является возможность регулирования скорости вращения в широких пределах, что затруднительно в асинхронных двигателях. Электрические машины постоянного тока представляют собой сочетание машин переменного тока с механическим выпрямителем- коллектором, являющимся неотъемлемой частью этих машин. С помощью коллектора переменный ток преобразуется в постоянный ток. Электрические машины постоянного тока имеют ограниченную область применения вследствие более высокой стоимости этих машин и их эксплуатации по сравнению с машинами переменного тока.
Электрические машины подразделяются на машины переменного тока и машины постоянного тока. Электрические машины переменного тока разделяют на синхронные, асинхронные и коллекторные. Наибольшее применение имеют синхронные генераторы переменного трехфазного тока и трехфазные асинхронные электродвигатели. Коллекторные электродвигатели переменного тока имеют ограниченное применение вследствие сложности устройства, обслуживания и более высокой стоимости. Основным их преимуществом является возможность регулирования скорости вращения в широких пределах, что затруднительно в асинхронных двигателях. Электрические машины постоянного тока представляют собой сочетание машин переменного тока с механическим выпрямителем- коллектором, являющимся неотъемлемой частью этих машин. С помощью коллектора переменный ток преобразуется в постоянный ток. Электрические машины постоянного тока имеют ограниченную область применения вследствие более высокой стоимости этих машин и их эксплуатации по сравнению с машинами переменного тока.
ГЛАВА СЕДЬМАЯ
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА
АСИНХРОННЫЕ ДВИГАТЕЛИ
Асинхронные электродвигатели переменного тока были изобретены и впервые применены русским инженером М. О. Доливо-Добровольским в 1889 г. Асинхронные электродвигатели переменного трехфазного тока вследствие простоты устройства и эксплуатации, надежности действия и низкой стоимости по сравнению с электродвигателями других конструкций, получили самое широкое применение во всех отраслях народного хозяйства, в том числе и для привода строительных машин и механизмов. Питание электродвигателей переменного тока производят через трансформаторы непосредственно от районных электросетей, что уменьшает потери электроэнергии, имеющейся при применении двигателей постоянного тока. В последнем случае помимо трансформации высокого напряжения переменного тока применяется его преобразование в постоянный ток, связанное с дополнительными потерями электроэнергии.
Асинхронные электромашины, присоединенные к электросети, как и все электрические машины, обладают свойством обратимости, т. е. могут работать как двигатели и как генераторы.
е. могут работать как двигатели и как генераторы.
В первом случае электроэнергия, получаемая из сети, расходуется на приведение электродвигателя во вращение, во втором случае вращение ротора асинхронной машины с помощью механического двигателя (внутреннего сгорания или парового) с определенной скоростью приводит к получению электроэнергии, передаваемой в электросеть.
Примером работы асинхронной машины в качестве электродвигателя и электрогенератора может быть подъемный кран. При подъеме груза машина работает как электродвигатель, потребляя электроэнергию из сети. Эта же машина может при известных условиях работать генератором, если под весом опускаемого груза ее ротор будет вращаться со скоростью, превышающей определенную величину. В последнем случае энергия будет передаваться в электросеть (рекуперация энергии).
§ 7.1. Принцип действия асинхронного электродвигателя
Принцип действия трехфазного асинхронного электродвигателя основан на явлении вращающегося магнитного поля, описанном в гл. 5.
5.
Вращающееся магнитное поле может быть двухполюсным, четырехполюсным, шестиполюсным и т. д.
Скорость вращения поля определяется соотношением
(7.1)
где η — скорость вращения поля, об/мин;
f — частота трехфазного тока;
р — число пар полюсов,
В асинхронном электродвигателе катушки из провода, необходимые для получения вращающегося магнитного поля, размещаются на неподвижной части двигателя — его статоре. В качестве примера на рис. 7.1 схематически показано размещение шести катушек на статоре асинхронного электродвигателя.
Принцип действия асинхронного двигателя состоит в следующем. Во вращающееся двухполюсное магнитное поле помещен один или несколько замкнутых витков (рис. 7.2).
Рис. 7.1. Схема расположения шести катушек на статоре асинхронного электродвигателя
Рис. 7.2. Принцип действия асинхронного электродвигателя
На рисунке вращающееся поле условно изображено в виде двух полюсов электромагнита, вращающегося по часовой стрелке. Магнитные силовые линии при вращении поля пересекают виток и по известному нам закону электромагнитной индукции наводят в нем э. д. с. Если замкнуть виток, в нем под действием э. д. с. будет протекать электрический ток.
Магнитные силовые линии при вращении поля пересекают виток и по известному нам закону электромагнитной индукции наводят в нем э. д. с. Если замкнуть виток, в нем под действием э. д. с. будет протекать электрический ток.
Направление тока в проводах витка, определяемое по правилу правой руки*, показано на рисунке крестиком и точкой. Магнитный поток, создаваемый током вокруг витка, будет взаимодействовать с вращающимся магнитным полем статора и в результате этого взаимодействия проводник будет двигаться. Направление механических сил, действующих на проводники, составляющие виток, определяется по правилу левой руки. На рисунке эти силы показаны стрелками. Из рисунка видно, что под действием указанных сил виток будет вращаться в ту же сторону, в какую вращается магнитное поле. Скорость вращения витка оказывается близкой к скорости вращения магнитного поля, но не равной ей (несколько меньшей).
Таков принцип действия асинхронного электродвигателя. Двигатель называется асинхронным потому, что его ротор вращается не синхронно с вращающимся магнитным полем, т. е. несколько отстает от него. Ни при каких условиях синхронного вращения ротора быть не может, так как в этом случае магнитные силовые линии поля не будут пересекать проводники ротора, а следовательно, в них не будет протекать ток, на взаимодействии которого с вращающимся магнитным полем основана работа электродвигателя.
е. несколько отстает от него. Ни при каких условиях синхронного вращения ротора быть не может, так как в этом случае магнитные силовые линии поля не будут пересекать проводники ротора, а следовательно, в них не будет протекать ток, на взаимодействии которого с вращающимся магнитным полем основана работа электродвигателя.
§ 7.2. Конструктивное устройство асинхронных электродвигателей
Асинхронный электродвигатель состоит из следующих основных частей: неподвижной части — статора, вращающейся части — ротора и двух подшипниковых щитов, в которые помещают концы вала ротора (рис. 7.3).
Короткозамкнутый ротор с обмоткой в виде беличьего колеса показан на рис. 7.3. Медные стержни «беличьего колеса» закладываются в пазы ротора и накоротко замыкаются двумя медными торцевыми кольцами (7.3, а).
* Пользуясь в данном случае правилом правой руки, следует учесть, что направление движении проводника относительно линий магнитного поля будет обратно направлению вращения поля, т. е. будет направлено против часовой стрелки.
будет направлено против часовой стрелки.
Рис 7.3. Электродвигатель с короткозамкнутым ротором:
а — беличье колесо ротора; б — короткозамкнутый ротор; в — общий вид
Рис. 7.4. Стальной лист статора
Часто «беличье колесо» ротора выполняется из алюминия, путем заливки пазов ротора расплавленным алюминием (7.3, б).
В чугунный или алюминиевый корпус статора запрессовывается кольцеобразный сердечник, собранный из стальных листов (рис. 7.4), толщиной 0,5 мм, изолированных друг от друга слоем лака или тонкими листами бумаги. Из таких же стальных штампованных листов собирают ротор. Сердечники служат магнитопроводом для магнитного потока, создаваемого обмоткой статора и ротора, которая размещается в пазах, выштампованных в сердечниках. Устройство сердечников из тонких стальных листов приводит к уменьшению вихревых токов, образуемых в них при пересечении магнитными потоками.
Обмотка статора выполняется в виде катушек из изолированного провода, заранее заготовленных и уложенных в пазы.
Шесть концов трехфазной обмотки статора выводятся наружу и крепятся к контактным зажимам специального щитка на корпусе электродвигателя или снабжаются маркированными наконечниками.
Рис. 7.5. Щитки с зажимами асинхронного двигателя
Рис. 7.6. Электродвигатель с фазным ротором:
а — ротор с контактными кольцами; б — общий вид
Выведенные концы дают возможность соединить обмотку статора и в звезду и в треугольник. При наличии щитка концы фаз подводятся к его зажимам (для удобства пересоединения обмотки) по схеме, указанной на рис. 7.5. Пересоединяя металлические планочки, имеющиеся на щитке, в одном случае получается соединение обмотки в треугольник, в другом — в звезду. При конструкциях электродвигателя без выводного щитка соединение обмотки в звезду или в треугольник достигается соответственным соединением ее выведенных маркированных концов.
Рис. 7.8. Схема включения асинхронного- двигателя с контактными кольцами:
1 — обмотка статора; 2 — обмотка ротора; 3 — контактные кольца; 4 — щетки; 5 — реостат
Рис. 7.7. Пружинный щеткодержатель: а—общий вид; б —щетка
7.7. Пружинный щеткодержатель: а—общий вид; б —щетка
Пересоединение обмотки статора позволяет использовать один и тот же электродвигатель при двух напряжениях. Так, например, если электродвигатель рассчитан на работу при соединении обмоток статора в звезду под напряжением 380 В, то он может развивать ту же мощность и при тех же оборотах под напряжением 220 В при соединении обмоток статора в треугольник. Обмотки роторов асинхронных электродвигателей небольшой мощности выполняют короткозамкнутыми, а средней и большой мощности с трехфазной обмоткой из изолированных проводов так же, как и обмотка статора. На рис. 7.6 показан электродвигатель с фазным ротором, трехфазные обмотки которого выполнены из изолированного провода. Обмотка уложена в пазы ротора так, что концы их соединены в звезду на самом роторе, а начала проводов присоединяются к трем контактным кольцам, насаженным на вал ротора и изолированным от вала и друг от друга. Ротор с контактными кольцами, называемый также фазным ротором, позволяет включать в свою цепь добавочное сопротивление реостата при пуске электродвигателя или для регулирования его оборотов. Обмотка ротора соединяется с кольцами изолированным проводом, пропущенным через отверстие, высверленное в валу. По кольцам скользят щетки, через которые обмотка ротора соединяется с реостатом. Щетки изготовляют из угля или смеси угля с графитом. Для машин с контактными кольцами применяются также щетки с содержанием меди или бронзы. На рис. 7.7 показан пружинный щеткодержатель со щеткой и часть контактного кольца. Схема включения асинхронного двигателя с фазным ротором (с контактными кольцами) представлена на рис. 7.8.
Обмотка ротора соединяется с кольцами изолированным проводом, пропущенным через отверстие, высверленное в валу. По кольцам скользят щетки, через которые обмотка ротора соединяется с реостатом. Щетки изготовляют из угля или смеси угля с графитом. Для машин с контактными кольцами применяются также щетки с содержанием меди или бронзы. На рис. 7.7 показан пружинный щеткодержатель со щеткой и часть контактного кольца. Схема включения асинхронного двигателя с фазным ротором (с контактными кольцами) представлена на рис. 7.8.
§ 7.3. Синхронная скорость вращения и скольжения
При включении асинхронного двигателя в сеть по обмоткам статора начинает протекать ток, создающий вращающийся магнитный поток. Скорость вращения этого потока % определяется формулой, приведенной в § 7.1, и называется синхронной. Вслед за вращающимся магнитным потоком начинает вращаться ротор со скоростью n2< n1.
Отношение
(7.2)
называется скольжением, так как показывает, насколько скорость вращения ротора отстает от вращающегося магнитного поля.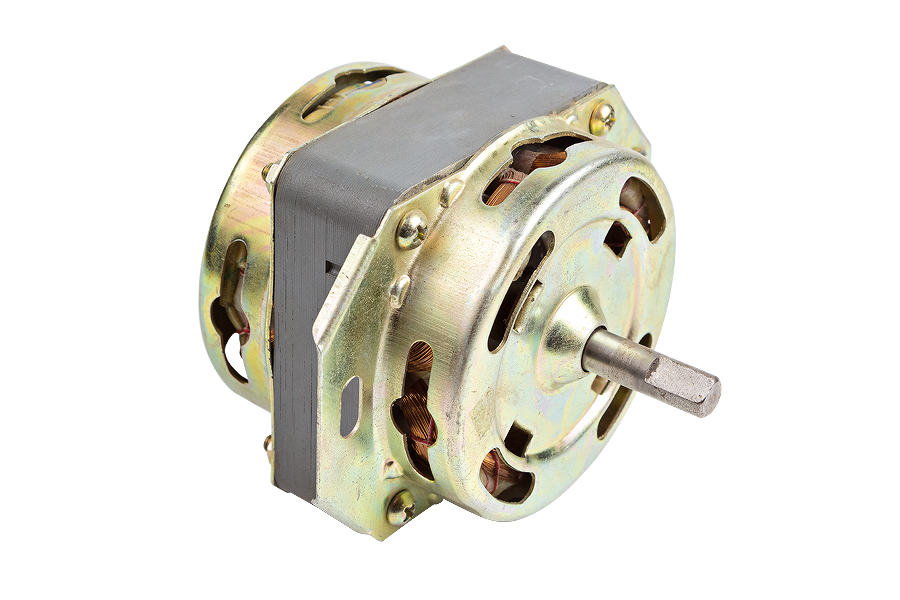
В момент включения электродвигателя, когда его ротор еще не стронулся с места, n2 = 0 и s = 1. Если предположить, что ротор вращается со скоростью магнитного поля, то п2 = щ и s = 0. Таким образом, теоретически скольжение меняется от 0 до 1 и от 0 до 100%. При увеличении нагрузки на валу электродвигателя, т. е. тормозного момента, скольжение ротора возрастает потому, что только при этом будет увеличиваться э. д. с. в обмотке ротора и ток, обусловливающий вращающий момент. В зависимости от номинальной мощности и типов электродвигателей при полной нагрузке скольжение обычно колеблется в пределах от 2 до 8%. У выпускаемых промышленностью электродвигателей повышенного скольжения при полной нагрузке скольжение составляет 8—12%.
§ 7.6. Механическая характеристика асинхронного электродвигателя
Для электропривода машин, в том числе и строительных, большое значение имеют механические характеристики электродвигателей.
Механической характеристикой называют зависимость скорости вращения электродвигателя от нагрузки на его валу, т. е. п = f (М), или s = f (М), где п — скорость вращения, s — величина скольжения, М — момент вращения, развиваемый двигателем.
е. п = f (М), или s = f (М), где п — скорость вращения, s — величина скольжения, М — момент вращения, развиваемый двигателем.
Рис. 7.10. Механическая характеристика асинхронного двигателя с короткозамкнутым ротором:
Рис. 7.11. Механические характеристики асинхронного электродвигателя с фазным ротором:
1 — естественная характеристика; 2 и 3 — искусственные характеристики
Механические характеристики подразделяются на естественные и и с к у с с т в е н н ы е. Естественной называют такую характеристику электродвигателя, которая образуется без какого-либо изменения схемы его включения (т. е. без введения дополнительного сопротивления в его цепи или изменения величины подводимого напряжения и др.). Искусственными же называют характеристики, получаемые изменением указанных выше величин (дополнительных сопротивлений, величины подводимого напряжения и т. д.).
На рис. 7.10 приведены механические характеристики асинхронных электродвигателей. На рис. 7.10 показана естественная характеристика двигателя с короткозамкнутым ротором. На участке кривой характеристики а — б — в, соответствующей устойчивой работе двигателя при увеличении вращающего момента от нуля до максимального его значения, скорость вращения уменьшается незначительно. Такая ме ханическая характеристика называется жесткой. Итак, асинхронный двигатель с короткозамкнутым ротором обладает жесткой механической характеристикой.
На участке кривой характеристики а — б — в, соответствующей устойчивой работе двигателя при увеличении вращающего момента от нуля до максимального его значения, скорость вращения уменьшается незначительно. Такая ме ханическая характеристика называется жесткой. Итак, асинхронный двигатель с короткозамкнутым ротором обладает жесткой механической характеристикой.
На рис. 7.11 показаны механические характеристики асинхронного двигателя с фазным ротором. Кривая 1 — естественная характеристика этого двигателя аналогична рассмотренной выше характеристике двигателя с короткозамкнутым ротором. Остальные кривые 2 и 3 представляют собой искусственные (так называемые — реостатные) механические характеристики того же двигателя, получаемые введением в цепь ротора дополнительных сопротивлений: RY и /?2, причем /?2 > Rx. Как видно из рисунка, искусственные характеристики изменяют характер зависимости п = f (М): при увеличении момента М скорость вращения п значительно уменьшается и тем скорее, чем больше дополнительное сопротивление, вводимое в цепь ротора. Такого рода характеристики называются мягкими. Итак, у асинхронного электродвигателя с фазным ротором есть жесткая естественная механическая характеристика и мягкие искусственные механические характеристики, получаемые при введении в цепь ротора дополнительных сопротивлений: при одном и том же значении М скольжение s, а следовательно, и скорость вращения п могут быть различными. Это свойство двигателя используется в качестве одного из способов регулирования числа оборотов асинхронных двигателей (см. следующий параграф).
Такого рода характеристики называются мягкими. Итак, у асинхронного электродвигателя с фазным ротором есть жесткая естественная механическая характеристика и мягкие искусственные механические характеристики, получаемые при введении в цепь ротора дополнительных сопротивлений: при одном и том же значении М скольжение s, а следовательно, и скорость вращения п могут быть различными. Это свойство двигателя используется в качестве одного из способов регулирования числа оборотов асинхронных двигателей (см. следующий параграф).
Классификация электродвигателей — Электрический двигатель
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создается вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).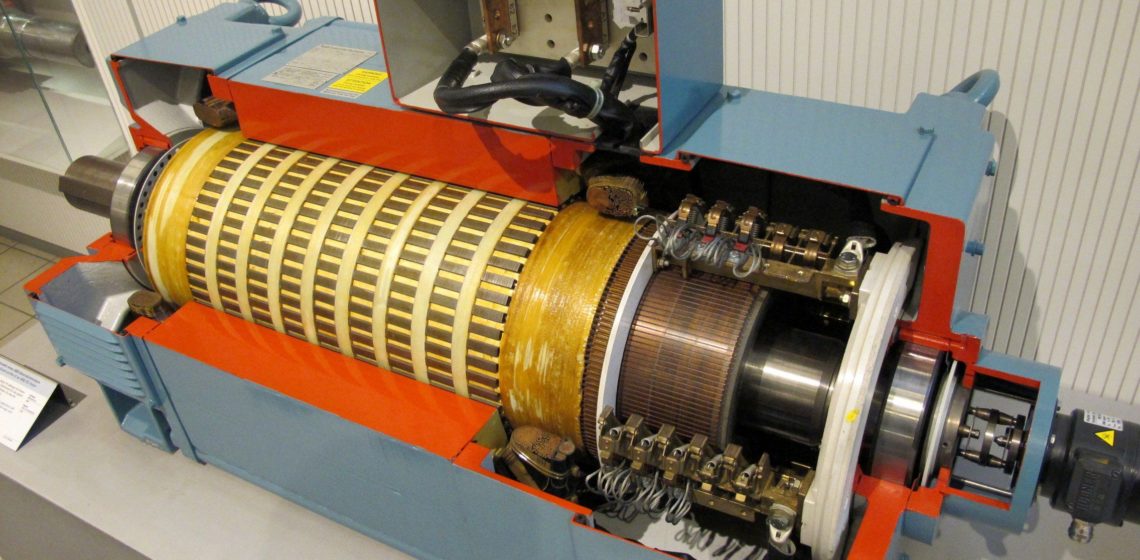
Двигатели постоянного тока
Двигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
- коллекторные двигатели;
- бесколлекторные двигатели.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.
По типу возбуждения коллекторные двигатели можно разделить на:
- двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
- двигатели с самовозбуждением .
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением;(обмотка якоря включается параллельно обмотке возбуждения)
- Двигатели последовательного возбуждения;(обмотка якоря включается последовательно обмотке возбуждения)
- Двигатели смешанного возбуждения. (обмотка возбуждения включается частично последовательно частично параллельно обмотке якоря)
 (обмотка возбуждения включается частично последовательно частично параллельно обмотке якоря)
(обмотка возбуждения включается частично последовательно частично параллельно обмотке якоря)Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора). Принцип работы данных двигателей аналогичен принципу работы синхронных двигателей.
Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками
Двигатели переменного тока
Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
однофазные — запускаются вручную, или имеют пусковую обмотку, или имеют фазосдвигающую цепь;
двухфазные — в том числе конденсаторные;
трёхфазные;
многофазные;
Универсальный коллекторный электродвигатель
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127,220., для постоянного 110.220. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства).
Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127,220., для постоянного 110.220. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
Электродвигатель. Виды и применение. Работа и устройство
Электродвигатель представляет электромашину, перестраивающую электрическую энергию в механическую. Обычно электрическая машина реализует механическую работу благодаря потреблению приложенной к ней электроэнергии, преобразовывающейся во вращательное движение. Ещё в технике есть линейные двигатели, способные создавать сразу поступательное движение рабочего органа.
Особенности конструкции и принцип действия
Не важно какое конструктивное исполнение, но устройство любых электродвигателей однотипное. Ротор и статор находятся внутри цилиндрической проточки. Вращение ротора возбуждают магнитное поле, отталкивающее его полюса от статора (неподвижной обмотки).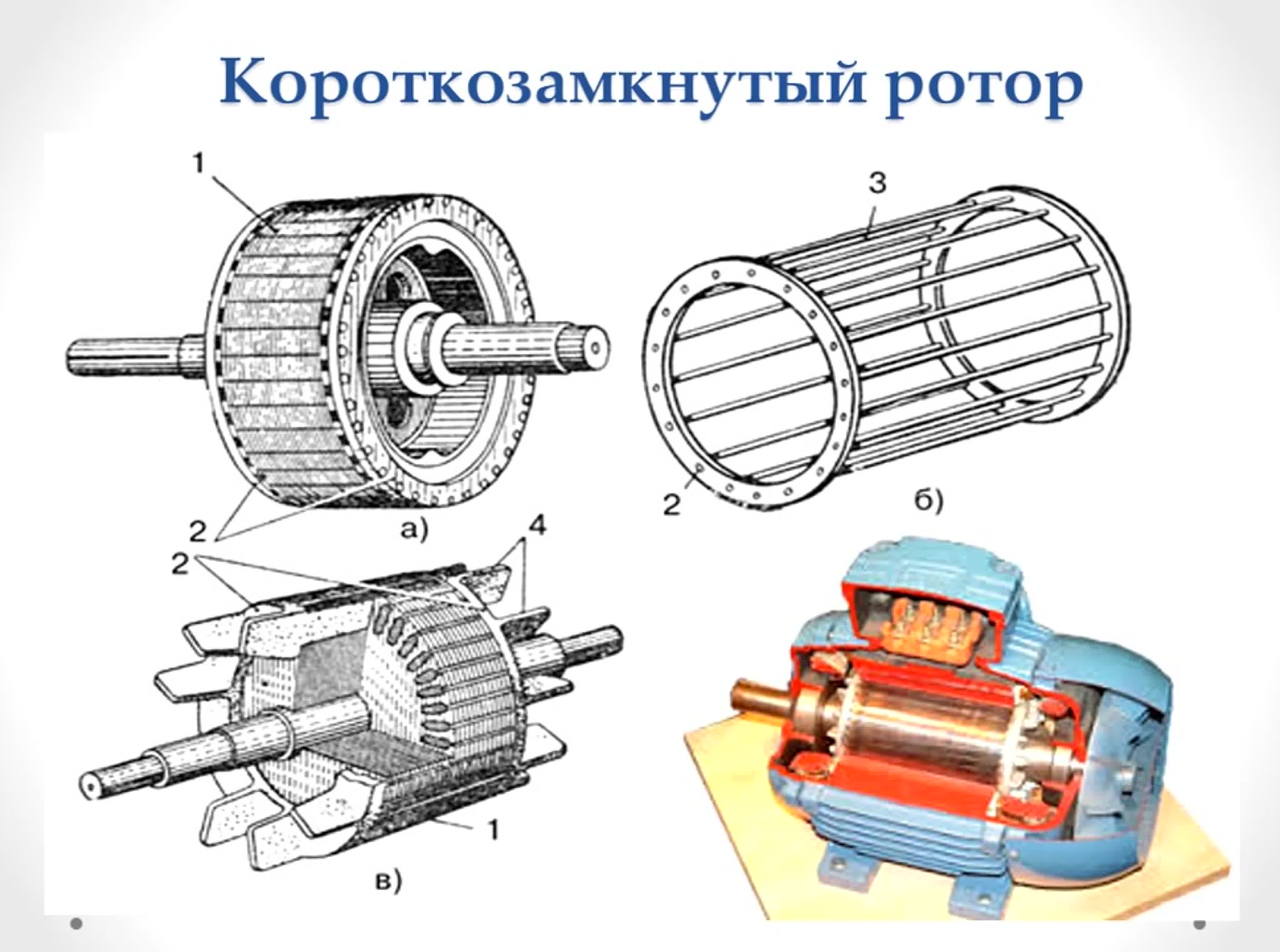 Сохранять постоянное отталкивание можно путём перекоммутации обмоток ротора, или образовав вращающееся магнитное поле непосредственно в статоре. Первый способ присущий коллекторным электродвигателям, а второй — асинхронным трехфазным.
Сохранять постоянное отталкивание можно путём перекоммутации обмоток ротора, или образовав вращающееся магнитное поле непосредственно в статоре. Первый способ присущий коллекторным электродвигателям, а второй — асинхронным трехфазным.
Корпус любых электродвигателей обычно чугунный или выполнен из сплава алюминия. Однотипные двигатели, не смотря на конструкцию корпуса производятся с одинаковыми установочными размерами и электрическими параметрами.
Работа электродвигателя базируется на принципах электромагнитной индукции. Магнитная и электрическая энергия создают электродвижущуюся силу в замкнутом контуре, проводящем ток. Это свойство заложено в работу любой электромашины.
На движущийся электроток в середине магнитного поля постоянно воздействует механическая сила, стремительно пытающаяся отклонить направление зарядов в перпендикулярной силовым магнитным линиям плоскости. Во время прохождения электротока по металлическому проводнику либо катушке, механическая сила норовит подвинуть или развернуть всю обмотку и каждый проводник тока.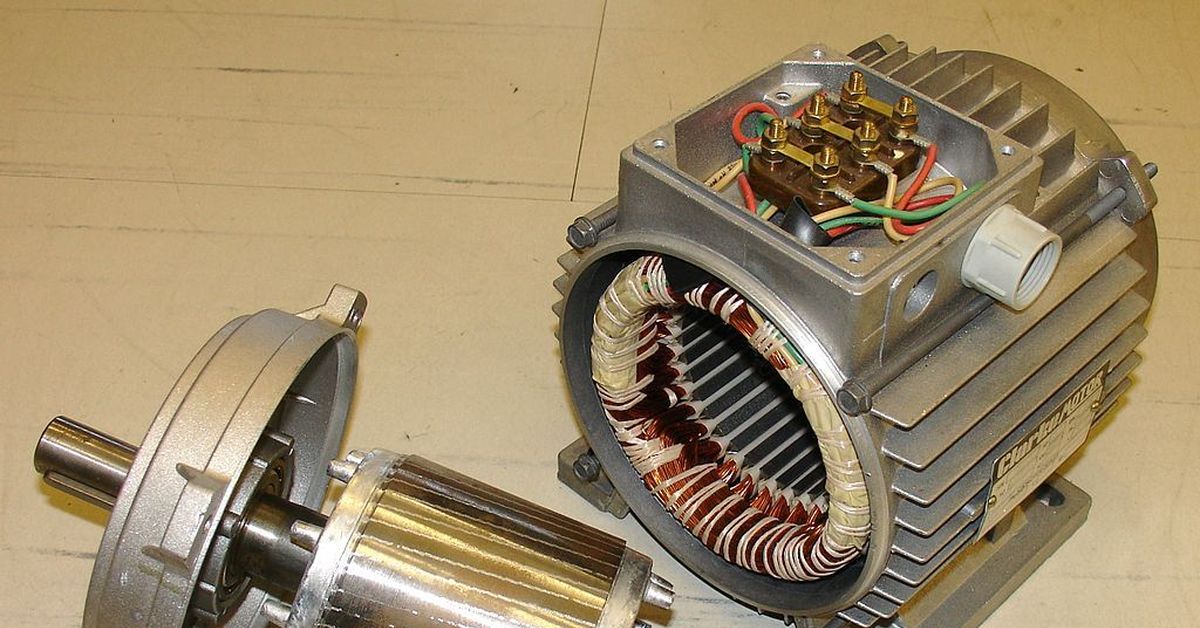
Назначение и применение электродвигателей
Электрические машины имеют много функций, они способны усиливать мощность электрических сигналов, преобразовывать величины напряжения либо переменный ток в постоянный и др. Для выполнения таких разных действий существуют многообразные типы электромашин. Двигатель представлят тип электрических машин, рассчитанных для преобразования энергии. А именно, этот вид устройств превращает электроэнергию в двигательную силу или механическую работу.
Он пользуется большим спросом во многих отраслях. Их широко используется в промышленности, на станках различного предназначения и в других установках. В машиностроении, к примеру, землеройных, грузоподъёмных машинах. Также они распространены в сферах народного хозяйства и бытовых приборах.
Классификация электродвигателей
Электродвигатель, является разновидностью электромашин по:
- Специфике, создающегося вращательного момента:
— гистерезисные;
— магнитоэлектрические. - Строению крепления:
— с горизонтальным расположением вала;
— с вертикальным размещением вала. - Защите от действий внешней среды:
— защищённые;
— закрытые;
— взрывонепроницаемые.
В гистерезисных устройствах вращающий момент образуется путём перемагничивания ротора или гистерезиса (насыщения). Эти двигатели мало эксплуатируются в промышленности и не считаются традиционными. Востребованными являются магнитоэлектрические двигатели. Существует много модификаций этих двигателей.
Их разделяют на большие группы по типу протекающего тока:
- Постоянного тока.
- Переменного тока.
- Универсальные двигатели (работают на постоянном переменном токе).
Особенности магнитоэлектрических двигателей постоянного тока
С помощью двигателей постоянного тока создают регулируемые электрические приводы с высокими эксплуатационными и динамическими показателями.
Типы электродвигателей:
- С электромагнитами.
- С постоянными магнитами.
Группа электродвигателей, питание которых выполняется постоянным током, подразделяется на подвиды:
- Коллекторные. В этих электроприборах присутствует щёточно-коллекторный узел, обеспечивающий электрическое соединение неподвижной и вращающейся части двигателя. Устройства бывают с самовозбуждением и независимым возбуждением от постоянных магнитов и электромагнитов.
- Выделяют следующие виды самовозбуждения двигателей:
— параллельное;
— последовательное;
— смешанное. - Коллекторные устройства имеют несколько минусов:
— низкая надёжность приборов;
— щёточно-коллекторный узел довольно сложная в обслуживании составляющая часть магнитоэлектрического двигателя. - Безколлекторные (вентильные). Это двигатели с замкнутой системой, работающие по аналогичному принципу работы синхронных устройств. Оснащены датчиком положения ротора, преобразователем координат, а также инвертором силовым полупроводниковым преобразователем.
Эти машины выпускаются различных размеров от самых маленьких низковольтных до громадных размеров (в основном до мегаватта). Миниатюрными электродвигателями оснащены компьютеры, телефоны, игрушки, аккумуляторные электроинструменты и т.п.
Применение, плюсы и минусы электродвигателей постоянного тока
Электромашины постоянного тока применяют в разных областях. Ими комплектуют подъёмно-транспортные, красочно-отделочные производственные машины, а также полимерное, бумажное производственное оборудование и т.д. Часто электрический двигатель этого типа встраивают в буровые установки, вспомогательные агрегаты экскаваторов и другие виды электротранспорта.
Преимущества электрических двигателей:
- Лёгкость в управлении и регулировании частоты вращения.
- Простота конструкции.
- Отменные пусковые свойства.
- Компактность.
- Возможность эксплуатации в разных режимах (двигательном и генераторном).
Минусы двигателей:
- Коллекторные двигатели требуют трудное профилактическое обслуживание щёточно-коллекторных узлов.
- Дороговизна производства.
- Коллекторные устройства имеют не большой срок службы из-за изнашивания самого коллектора.
Электродвигатель переменного тока
В электродвигателях переменного тока электроток описывается по синусоидальному гармоническому закону, периодично меняющему свой знак (направление).
Статор этих устройств изготавливают из ферромагнитных пластинок, имеющих пазы для помещения в них витков обмотки с конфигурацией катушки.
Электродвигатели по принципу работы бывают синхронными и асинхронными. Главным их отличием является то, что скорость магнитодвижущей силы статора в синхронных приборах равна скорости вращения ротора, а в асинхронных двигателях эти скорости не совпадают, обычно ротор вращается медленнее поля.
Синхронный электродвигатель
Из-за одинакового (синхронного) вращения ротора с магнитным полем, аппараты именуют синхронными электродвигателями. Их подразделяют на подвиды:
- Реактивный.
- Шаговый.
- Реактивно-гистерезисный.
- С постоянными магнитами.
- С обмотками возбуждения.
- Вентильный реактивный.
- Гибридно-реактивный синхронный двигатель.
Большая часть компьютерной техники оснащена шаговыми электродвигателями. Преобразование энергии в этих устройствах основано на дискретно угловом передвижении ротора. Шаговый электродвигатель имеет высокую продуктивность, независящую от их мизерных размеров.
Достоинства синхронных двигателей:
- Стабильность частоты вращения, что не зависит от механических нагрузок на валу.
- Низкая чувствительность к скачкам напряжения.
- Могут выступать в роли генератора мощности.
- Снижают потребление мощности, предоставляемой электростанциями.
Недостатки в синхронных устройствах:
- Сложности с запуском.
- Сложность конструкции.
- Затруднения в регулировки частоты вращения.
Недостатки синхронного двигателя, делают более выгодным для использования электродвигатель асинхронного типа. Тем не менее, большинство синхронных двигателей из-за их работы с постоянной скоростью востребованы для установок в компрессоры, генераторы, насосы, а также крупные вентиляторы и пр. оборудование.
Асинхронный электродвигатель
Статор асинхронных двигателей представляет распределённую двухфазную, трехфазную, реже многофазную обмотку. Ротор выполняют в виде цилиндра, используя медь, алюминий либо металл. В его пазы залиты либо запрессованные токопроводящие жилы к оси вращения под определённым углом. Они соединяются в одно целое на торцах ротора. Противоток возбуждается в роторе от переменного магнитного поля статора.
По конструктивным особенностям выделяют два вида асинхронных двигателей:
- С фазным ротором.
- С короткозамкнутым ротором.
В остальном конструкция приборов не имеет отличий, статор у них абсолютно одинаковый. По числу обмоток выделяют такие электродвигатели:
- Однофазные. Этот тип двигателей самостоятельно не запускается, ему требуется стартовый толчок. Для этого применяется пусковая обмотка либо фазосдвигающая цепь. Также приборы запускаются вручную.
- Двухфазные. В этих устройствах присутствуют две обмотки со смещёнными на угол фазами. В приборе возникает вращающееся магнитное поле, напряженность которого в полюсах одной обмотки нарастает и синхронно спадает в другой.
Двухфазный электродвигатель может самостоятельно запускаться, но с реверсом присутствуют сложности. Часто этот тип устройств подключают к однофазным сетям, включая вторую фазу через конденсатор. - Трехфазные. Достоинством этих типов электродвигателей является легкий реверс. Основные части двигателя – это статор с тремя обмотками и ротор. Позволяет плавно регулировать скорость ротора. Эти приборы довольно востребованы в промышленности и технике.
- Многофазные. Состоят эти устройства из встроенной многофазной обмотки в пазах статора на его внутренней поверхности. Эти двигатели гарантируют высокую надёжность при эксплуатации и считаются усовершенствованными моделями двигателей.
Асинхронные электрические двигатели значительно облегчают работу людей, поэтому они незаменимы во многих сферах.
Достоинствами этих приборов, которые сыграли роль в их популярности, являются следующие моменты:
- Простота производства.
- Высокая надёжность.
- Не нуждаются в преобразователях для включения в сеть.
- Небольшие расходы при эксплуатации.
Ко всему этому, можно добавить относительную стоимость асинхронных приборов. Но они также имеют и недостатки:
- Невысокий коэффициент мощности.
- Трудность в точной регулировке скорости.
- Маленький пусковой момент.
- Зависимость от напряжения сети.
Но благодаря питанию электродвигателя с помощью частотного преобразователя, некоторые недостатки устройств устраняются. Поэтому потребность асинхронных моторов не падает. Их применяют в приводах разных станков в областях металлообработки, деревообработки и пр. В них нуждаются ткацкие, швейные, землеройные, грузоподъёмные и другие виды машин, а также вентиляторы, насосы, центрифуги, разные электроинструменты и бытовые приборы.
Похожие темы:
FAQ по электродвигателям | Техпривод
Какие электродвигатели применяются чаще всего?
Какие способы управления электродвигателями используются?
Как прозвонить электродвигатель и определить его сопротивление?
Как определить мощность электродвигателя?
Как увеличить или уменьшить обороты электродвигателя?
Как рассчитать ток и мощность электродвигателя?
Как увеличить мощность электродвигателя?
Каковы потери мощности при подключении трехфазного двигателя к однофазной сети?
Какие исполнения двигателей бывают?
Зачем электродвигателю тормоз?
Как двигатель обозначается на электрических схемах?
Почему греется электродвигатель?
Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы:
Выбор электродвигателя
Использование тормозных резисторов с преобразователями частоты
Двигатели переменного и постоянного тока: различия и преимущества
Электродвигатели играют важную роль почти во всех отраслях промышленности. Использование правильного типа двигателя с высококачественными деталями и регулярное обслуживание обеспечивает бесперебойную работу вашего предприятия и предотвращает повреждение оконечного оборудования из-за износа или скачков напряжения.
Gainesville Industrial Electric может помочь вашей компании выбрать правильные промышленные электродвигатели и детали для ваших приложений.
A Primer on Electric Motors
Электродвигатели — это машины, которые преобразуют электрическую энергию — из накопленной мощности или прямого электрического соединения — в механическую энергию за счет создания вращательной силы.Два основных типа электродвигателей :
- Двигатели переменного тока , которые питаются от переменного тока
- Двигатели постоянного тока , которые питаются постоянным током
Как работают электродвигатели
И переменного тока, и Электродвигатели постоянного тока используют электрический ток для создания вращающихся магнитных полей, которые, в свою очередь, создают вращательную механическую силу в якоре, расположенном на роторе или статоре, вокруг вала. В различных конструкциях двигателей используется одна и та же основная концепция для преобразования электрической энергии в мощные всплески силы и обеспечения динамических уровней скорости или мощности.
Компоненты главного двигателя
Хотя электродвигатели могут отличаться от одной конструкции или типа к другой, многие из них содержат следующие детали и узлы (расположены от центра, направленного наружу):
- Центральный вал двигателя
- Обмотки
- Подшипники (для уменьшения трения и износа)
- Якорь (расположен на роторе, вращающейся части или статоре, неподвижной части)
- Щетки (в двигателях постоянного тока)
- Клеммы
- Рама и торцевые щитки
Типы электродвигателей: AC vs.Двигатели постоянного тока
Двигатели переменного и постоянного тока — это широкие категории двигателей, которые включают меньшие подтипы. Например, асинхронные двигатели, линейные двигатели и синхронные двигатели — это все типы двигателей переменного тока. Двигатели переменного тока также могут включать в себя частотно-регулируемые приводы для управления скоростью и крутящим моментом двигателя, тогда как двигатели постоянного тока доступны в моделях с самовозбуждением и с раздельным возбуждением.
Привод с регулируемой скоростью переменного тока
Двигатель переменного тока по сравнению с двигателем постоянного тока Преимущества
Каждый тип двигателя имеет различные преимущества, которые делают их наиболее подходящими для различных коммерческих и промышленных применений. Электродвигатели переменного тока , например, универсальны и просты в управлении. Некоторые из их других преимуществ включают:
- Низкие требования к пусковой мощности, которые также защищают компоненты на принимающей стороне
- Контролируемые уровни пускового тока и ускорения
- Надстройки частотно-регулируемого привода или частотно-регулируемого привода, которые могут управлять скоростью и крутящим моментом на разных этапах используйте
- Высокая надежность и более длительный срок службы
- Возможности для многофазных конфигураций
Двигатели постоянного тока также обладают собственными преимуществами , такими как:
- Более простая установка и обслуживание
- Высокая пусковая мощность и крутящий момент
- Быстрое время отклика на запуск, остановку и ускорение
- Доступность для нескольких стандартных напряжений
Какой двигатель более мощный: переменного или постоянного тока?
Двигатели переменного тока обычно считаются более мощными, чем двигатели постоянного тока, поскольку они могут создавать более высокий крутящий момент за счет использования более мощного тока.Однако двигатели постоянного тока обычно более эффективны и лучше используют входную энергию. Двигатели переменного и постоянного тока бывают разных размеров и мощностей, которые могут удовлетворить любые отраслевые требования к питанию.
Применение двигателей переменного и постоянного тока
Двигатели переменного и постоянного тока находят применение в технологических процессах и объектах практически во всех отраслях промышленности. Некоторые из наиболее распространенных промышленных применений для двигателей переменного тока включают:
- Приборы
- Компрессорные приводы и системы
- Компьютеры
- Конвейерные системы
- Вентиляторы и кондиционеры
- Гидравлические и ирригационные насосы
- Транспортное оборудование
Стандартные промышленные применения двигателей постоянного тока включают:
- Производство и производственные единицы
- Оборудование, требующее постоянной мощности, такое как пылесосы, лифты и швейные машины
- Складское сортировочное оборудование
Выбор подходящего электрического Электродвигатель для вашего промышленного применения
Установка и обслуживание правильных электродвигателей на предприятиях и оборудовании вашей компании является важным шагом к обеспечению бесперебойной работы и производства.
Gainesville Industrial Electric продает и обслуживает двигатели переменного и постоянного тока, запчасти и многое другое. Мы также являемся авторизованным заводским гарантийным центром. Чтобы получить помощь в выборе подходящего электродвигателя или промышленной сборки для вашего применения, свяжитесь с нами или запросите дополнительную информацию сегодня, чтобы получить ценовое предложение.
Связанное содержание:
В чем разница между двигателями переменного тока и двигателями постоянного тока?
Между двигателями переменного и постоянного тока существует много различий.Наиболее очевидное различие — это тип тока, который каждый двигатель превращает в энергию: переменный ток в случае двигателей переменного тока и постоянный ток в случае двигателей постоянного тока. Двигатели переменного тока известны своей повышенной выходной мощностью и эффективностью, в то время как двигатели постоянного тока ценятся за их контроль скорости и диапазон выходной мощности. Двигатели переменного тока доступны в одно- или трехфазной конфигурации, тогда как двигатели постоянного тока всегда однофазные.
Подробнее о электродвигателях переменного тока
В двигателе переменного тока энергия поступает из магнитных полей, создаваемых через катушки, намотанные вокруг выходного вала.Двигатели переменного тока состоят из нескольких частей, включая статор и ротор. Двигатели переменного тока эффективны, долговечны, бесшумны и универсальны, что делает их жизнеспособным решением для многих потребностей в производстве электроэнергии.
К двум типам двигателей переменного тока относятся:
- Синхронный: Синхронный двигатель вращается с той же скоростью, что и частота питающего тока, что и дало ему название. Синхронные двигатели состоят из статора, ротора и синхронных двигателей, которые используются в широком спектре приложений.
- Индукция: Асинхронные двигатели — это самые простые и самые надежные из имеющихся электродвигателей. Эти электродвигатели переменного тока состоят из двух электрических узлов: статора с обмоткой и узла ротора. Электрический ток, необходимый для вращения ротора, создается за счет электромагнитной индукции, создаваемой обмоткой статора. Асинхронные двигатели являются одними из наиболее часто используемых типов двигателей в мире.
Электродвигатели переменного тока
используются в различных сферах, включая насосы для предприятий общественного питания, водонагреватели, садовое и газонное оборудование и многое другое.
Подробнее о двигателях постоянного тока
Энергия, используемая двигателем постоянного тока, поступает от батарей или другого генерируемого источника энергии, обеспечивающего постоянное напряжение. Двигатели постоянного тока состоят из нескольких частей, наиболее известными из которых являются подшипники, валы и редуктор или шестерни. Двигатели постоянного тока обеспечивают лучшее изменение скорости и управление, а также обеспечивают больший крутящий момент, чем двигатели переменного тока.
К двум типам двигателей постоянного тока относятся:
- Матовый: Один из самых старых типов двигателей, щеточные двигатели — это электродвигатели с внутренней коммутацией, работающие от постоянного тока.Щеточные двигатели состоят из ротора, щеток, оси, а заряд и полярность щеток контролируют направление и скорость двигателя.
- Бесщеточные: В последние годы бесщеточные двигатели приобрели популярность во многих сферах применения, в основном благодаря их эффективности. Бесщеточные двигатели устроены так же, как и щеточные двигатели, за исключением, конечно, щеток. Бесщеточные двигатели также включают специализированную схему для управления скоростью и направлением. В бесщеточных двигателях вокруг ротора установлены магниты, что повышает эффективность.
Двигатели постоянного тока используются в широком спектре приложений, включая электрические инвалидные коляски, ручные распылители и насосы, кофеварки, внедорожное оборудование и многое другое.
Индукционные двигатели
и бесщеточные двигатели постоянного тока
Wally Rippel — давний сторонник электромобилей. До прихода в Tesla Motors он работал инженером в AeroVironment, где помогал разработать EV1 для General Motors и снялся в документальном фильме «Кто убил электромобиль?». Уолли также работал в Лаборатории реактивного движения над исследованиями аккумуляторных батарей электромобилей, среди других проектов.В 1968 году, будучи студентом Caltech , он построил электромобиль (переоборудованный микроавтобус Volkswagen 1958 года) и выиграл Великую трансконтинентальную гонку электромобилей против Массачусетского технологического института.
Один размер не подходит для всех
В этом одиозном мире газовых автомобилей не все двигатели одинаковы. Существуют конфигурации с плоскими головками, полусферическими, прямыми, противоположными и V-образными формами. И так далее. Можно было подумать, что много лет назад кто-нибудь придумал, что лучше.Это бы положило конец всему выбору, и после этого в производстве был бы только один лучший тип двигателя. Не так. Не существует одного наилучшего типа двигателя, скорее, существуют разные типы двигателей, отвечающие личным требованиям, таким как цена и производительность. Это также верно для приводов электромобилей.
Когда у меня были волосы на голове и я носил логарифмическую линейку, были свинцово-кислотные батареи, щеточные двигатели постоянного тока и контроллеры контакторов. Сегодня ничего из этого не осталось (включая мои волосы). Свинец был заменен литием, а постоянный ток — бесщеточным или индукционным.Между тем, на смену контакторам пришли модулирующие инверторы. Итак, каждый из этих элементов также устареет в ближайшем будущем или возможно, что некоторая «стабильность» может быть под рукой? Без хорошего хрустального шара трудно предсказать будущее. Однако я предполагаю, что и индукционные, и бесколлекторные машины еще долгие годы «победят». У каждого будут свои верные сторонники и религиозные недоброжелатели.
Более внимательный взгляд
Итак, что это за две технологии? Как они работают? Что их отличает? А что у них общего? Начнем с бесщеточных приводов постоянного тока.
В бесщеточных машинах ротор включает два или более постоянных магнита, которые создают постоянное магнитное поле (если смотреть с точки обзора ротора). В свою очередь, это магнитное поле входит в сердечник статора (сердечник, состоящий из тонких слоистых пластин) и взаимодействует с токами, протекающими внутри обмоток, создавая крутящий момент между ротором и статором. По мере вращения ротора необходимо, чтобы величина и полярность токов статора постоянно менялись — и правильно — так, чтобы крутящий момент оставался постоянным, а преобразование электрической энергии в механическую было оптимально эффективным.Устройство, обеспечивающее этот контроль тока, называется инвертором. Без него бесщеточные двигатели — бесполезные двигатели.
Перейдем к асинхронным двигателям. Предшественник трехфазного асинхронного двигателя был изобретен Никола Тесла примерно до 1889 года. Любопытно, что статоры трехфазного асинхронного двигателя и бесщеточного двигателя постоянного тока практически идентичны. Оба имеют три набора «распределенных обмоток», вставленных в сердечник статора. Существенная разница между двумя машинами заключается в роторе.
В отличие от бесщеточного ротора постоянного тока, индукционный ротор не имеет магнитов — только уложенные друг на друга стальные пластины с заглубленными периферийными проводниками, которые образуют «закороченную структуру». Токи, протекающие в обмотках статора, создают вращающееся магнитное поле, которое входит в ротор. В свою очередь, частота этого магнитного поля, «видимая» ротором, равна разнице между приложенной электрической частотой и «частотой» вращения самого ротора. Соответственно, на закороченной конструкции существует индуцированное напряжение, которое пропорционально этой разнице скоростей между ротором и электрической частотой.В ответ на это напряжение внутри проводников ротора возникают токи, которые приблизительно пропорциональны напряжению, следовательно, разнице скоростей. Наконец, эти токи взаимодействуют с исходным магнитным полем, создавая силы, составляющей которых является желаемый крутящий момент ротора.
Когда 3-фазный асинхронный двигатель подключен к 3-фазному источнику питания, крутящий момент создается с самого начала; мотор имеет возможность запускаться под нагрузкой. Инвертор не нужен. (Если бы потребовался инвертор, изобретение Теслы было бы бесполезно примерно до 1960-х годов.) Тот факт, что асинхронные двигатели напрямую совместимы с обычными электросетями, является основной причиной их успеха. Напротив, бесщеточный двигатель постоянного тока не создает пусковой крутящий момент при прямом подключении к электросети с фиксированной частотой. Им действительно нужна помощь инвертора, чья «фаза» поддерживается в соответствии с угловым положением ротора.
Хотя трехфазные асинхронные двигатели очень полезны, они также имеют некоторые серьезные ограничения. Они не могут работать от постоянного тока; AC — необходимость.Скорость вала пропорциональна частоте сети. Следовательно, при использовании от электросети они представляют собой машины с постоянной скоростью. Наконец, при работе от электросети они имеют ограниченный пусковой крутящий момент и несколько ограниченные возможности максимального рабочего крутящего момента по сравнению с машинами постоянного тока.
Добавьте инвертор (без какого-либо управления с обратной связью), и становится возможным питание асинхронной машины от батареи или другого источника постоянного тока; регулировка скорости также становится возможной, просто регулируя частоту инвертора.Тем не менее, характеристики крутящего момента низкие по сравнению с машинами постоянного тока. Добавьте несколько контуров обратной связи, чтобы инвертор вырабатывал именно ту частоту, которая «нужна» двигателю, и теперь асинхронный двигатель может конкурировать с бесщеточными двигателями постоянного и постоянного тока в транспортных средствах.
Бесщеточный или индукционный?
Еще в 1990-х годах все электромобили, кроме одного, приводились в движение бесщеточными приводами постоянного тока. Сегодня все без исключения гибриды питаются от бесщеточных приводов постоянного тока. Единственное известное применение индукционных приводов было General Motors EV-1; двигательные установки переменного тока, в том числе церо; и Tesla Roadster.
В бесщеточных и асинхронных приводах постоянного тока используются двигатели с одинаковыми статорами. Оба привода используют 3-фазные модулирующие инверторы. Единственные различия — это роторы и инверторное управление. А с цифровыми контроллерами единственная разница в управлении заключается в управляющем коде. (Бесщеточные приводы постоянного тока требуют датчика абсолютного положения, в то время как индукционные приводы требуют только датчика скорости; эти различия относительно невелики.)
Одно из основных отличий заключается в том, что бесщеточный привод постоянного тока вырабатывает гораздо меньше тепла ротора.Охлаждение ротора проще, и пиковая эффективность этого привода обычно выше. Бесщеточный привод постоянного тока также может работать с единичным коэффициентом мощности, тогда как лучший коэффициент мощности для индукционного привода составляет около 85 процентов. Это означает, что пиковая энергоэффективность бесщеточного привода постоянного тока обычно будет на несколько процентных пунктов выше, чем для асинхронного привода.
В идеальном бесщеточном приводе сила магнитного поля, создаваемого постоянными магнитами, могла бы регулироваться.Когда требуется максимальный крутящий момент, особенно на низких скоростях, напряженность магнитного поля (B) должна быть максимальной, чтобы токи инвертора и двигателя поддерживались на минимально возможных значениях. Это сводит к минимуму потери I² R (сопротивление току²) и тем самым оптимизирует эффективность. Точно так же, когда уровни крутящего момента низкие, поле B должно быть уменьшено так, чтобы потери на завихрение и гистерезис из-за B также были уменьшены. В идеале B следует отрегулировать так, чтобы сумма потерь на завихрение, гистерезис и I² была минимальной.К сожалению, нет простого способа изменить B с помощью постоянных магнитов.
Напротив, индукционные машины не имеют магнитов, и поля B являются «регулируемыми», поскольку B пропорционально V / f (напряжение к частоте). Это означает, что при малых нагрузках инвертор может снижать напряжение, так что магнитные потери уменьшаются, а эффективность увеличивается до максимума. Таким образом, индукционная машина при работе с интеллектуальным инвертором имеет преимущество по сравнению с бесщеточной машиной постоянного тока — магнитными потерями и потерями проводимости можно торговать, чтобы оптимизировать эффективность.Это преимущество становится все более важным по мере увеличения производительности. В бесщеточном режиме постоянного тока с увеличением размера машины пропорционально увеличиваются магнитные потери, а эффективность при частичной нагрузке падает. С индукцией по мере увеличения размера машины потери не обязательно растут. Таким образом, индукционные приводы могут быть предпочтительным подходом там, где желательна высокая производительность; пиковая эффективность будет немного меньше, чем у бесщеточного постоянного тока, но средняя эффективность может быть лучше.
Постоянные магниты дорогие — около 50 долларов за килограмм.Роторы с постоянными магнитами (PM) также сложны в обращении из-за очень больших сил, которые вступают в действие, когда что-либо ферромагнитное приближается к ним. Это означает, что асинхронные двигатели, вероятно, сохранят преимущество в стоимости по сравнению с машинами с постоянным магнитом. Кроме того, из-за способности асинхронных машин ослаблять поля номинальные характеристики инверторов и их стоимость оказываются ниже, особенно для высокопроизводительных приводов. Поскольку прядильные асинхронные машины вырабатывают небольшое напряжение или не вырабатывают его вообще без возбуждения, их легче защитить.
Чуть не забыл: индукционные машины сложнее управлять. Законы управления более сложны и трудны для понимания. Достижение стабильности во всем диапазоне крутящего момента-скорости и при перегреве с индукцией труднее, чем с бесщеточным постоянным током. Это означает дополнительные затраты на разработку, но, скорее всего, незначительные повторяющиеся затраты или их отсутствие.
По-прежнему нет победителя
Я пришел к выводу, что бесщеточные приводы постоянного тока, вероятно, продолжат доминировать на рынке гибридных и будущих подключаемых гибридных устройств, и что индукционные приводы, вероятно, сохранят доминирующее положение среди высокопроизводительных чистых электрических устройств.Вопрос в том, что произойдет, если гибриды станут более энергоемкими и их производительность возрастет? Тот факт, что так много аппаратного обеспечения является общим для обоих приводов, может означать, что мы увидим индукцию и бесщеточную работу постоянного тока в реальном времени и работаем бок о бок в наступающей золотой эре гибридных и электрических транспортных средств.
Типы двигателей
| Renesas
Матовый двигатель постоянного тока
Поскольку этот тип двигателя приводится в действие источником постоянного тока, его также называют просто двигателем постоянного тока.Чтобы отличить его от синхронного двигателя с постоянными магнитами (бесщеточный двигатель постоянного тока), мы будем называть его щеточным двигателем постоянного тока. Поскольку щеточный двигатель постоянного тока сравнительно экономичен и прост в управлении, он используется в широком диапазоне применений.
Щеточный двигатель постоянного тока генерирует крутящий момент путем механического переключения направления тока в координации с вращением с помощью коммутатора и щеток. Недостатки щеточного двигателя постоянного тока включают необходимость технического обслуживания из-за износа щеток и возникновения электрических и механических шумов.Коэффициент заполнения ШИМ можно регулировать с помощью микроконтроллера и т. Д. Для изменения приложенного напряжения, что позволяет контролировать скорость вращения и положение.
Приложения
- Игрушки
- Электроинструмент
- Автомобильные электронные компоненты
Синхронный двигатель с постоянными магнитами (бесщеточный двигатель постоянного тока)
Уберите коммутатор и щетки, которые являются недостатками щеточного двигателя постоянного тока, и вы получите синхронный двигатель с постоянными магнитами (бесщеточный двигатель постоянного тока).
Из-за отсутствия щеток бесщеточный двигатель постоянного тока имеет длительный срок службы и низкий уровень шума. Кроме того, он может обеспечить высокую эффективность, поэтому он используется в широком спектре приложений, включая энергосберегающие бытовые приборы и длительные промышленные приложения.
Есть два основных типа конструкции, различающиеся тем, как магнит установлен на роторе.
- Поверхностный постоянный магнит (SPM): у этого типа постоянный магнит прикреплен к внешней стороне ротора, а магнитная проницаемость постоянна во всех положениях.
- Внутренний постоянный магнит (IPM): этот тип имеет постоянный магнит, встроенный в ротор, и, поскольку магнитная проницаемость изменяется в зависимости от положения, можно использовать момент сопротивления.
Поскольку не существует структуры для механического переключения направления тока, это необходимо выполнять электронным способом с использованием схемы инвертора. При возбуждении схемы инвертора с помощью микроконтроллера и т. Д. К статору прикладывается трехфазное напряжение переменного тока, создавая вращающееся магнитное поле.
Формы сигналов
можно разделить на следующие два основных типа.
- Привод с трапецеидальной (прямоугольной) волной: управляет подачей напряжения в форме трапецеидальной (прямоугольной) волны.
- Привод синусоидальной волны: Приводится путем подачи напряжения синусоидальной формы для подавления вибрации, шума и пульсации крутящего момента, которые возникают при использовании привода с трапецеидальной волной. Во многих случаях векторное управление (управление, ориентированное на поля) используется для линейно независимого управления крутящим моментом и фазой.Поскольку крутящий момент пропорционален приводному току, высокоскоростное и высокоточное управление положением и скоростью возможно за счет добавления датчиков положения и скорости.
Для эффективного движения необходимо определить положение ротора (магнита). Датчики Холла, энкодеры и резольверы используются для определения положения. Из-за температурных ограничений датчиков и соображений стоимости бывают случаи, когда положение ротора (магнита) оценивается по трехфазному току или индуцированному напряжению без использования датчиков (оценка положения без датчиков).
В целом, в промышленных системах в основном используется сенсорный метод, а в бытовых приборах — бессенсорный метод оценки положения.
Приложения
- Кондиционеры
- Стиральные машины
- Холодильники
- Электроинструмент
- Сервоприводы
- Роботы
- Компрессоры
- Жесткие диски (HDD)
- Автомобильные электронные компоненты
Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель — это асинхронный двигатель, приводимый в действие трехфазным источником переменного тока.Вращающееся магнитное поле создается путем пропускания трехфазного переменного тока через статор, а индуцированный ток создается в роторе за счет электромагнитной индукции. Это вращающееся магнитное поле и индуцированный ток создают электромагнитную силу, которая заставляет ротор вращаться. Поскольку магнитное поле должно перемещаться относительно ротора, чтобы генерировать индуцированный ток, скорость вращения ротора всегда ниже, чем синхронная скорость вращающегося магнитного поля.Разница между частотой вращающегося магнитного поля и частотой, эквивалентной скорости вращения, называется частотой скольжения. Создаваемый крутящий момент пропорционален частоте скольжения.
Трехфазный асинхронный двигатель имеет простую и прочную конструкцию. Поскольку он прост в использовании для двигателей большой мощности и имеет относительно хороший КПД, он часто используется в промышленных сегментах. Однако из-за вышеупомянутой частоты скольжения он не подходит для управления положением.
Во многих случаях трехфазный переменный ток, используемый на заводах и т. Д., Вводится непосредственно для привода двигателя с постоянной скоростью. Для энергосберегающих приложений с регулируемой скоростью, которые ценят эффективность, двигатель может иметь инверторный привод для управления крутящим моментом и скоростью вращения.
Однофазный асинхронный двигатель
Однофазные асинхронные двигатели — это тип асинхронных двигателей, которые, как следует из названия, работают от однофазного источника переменного тока.Поскольку самозапуск невозможен при однофазном переменном токе, двигателю требуется способ запуска.
Однофазные асинхронные двигатели можно разделить на следующие три основных типа, в зависимости от способа их запуска.
- Конденсатор: Конденсатор разделяет фазы для создания двухфазного переменного тока для получения пускового момента.
- Разделенная фаза: Катушка стартера с низкой индуктивностью используется для получения пускового момента.
- Затененный полюс: затененный полюс производит наведенный ток, который используется для получения пускового момента.
Во многих случаях однофазный переменный ток, используемый в домах и т. Д., Вводится напрямую для приведения в действие двигателя с постоянной скоростью. Фазой переменного напряжения можно управлять с помощью симистора для управления скоростью вращения.
Приложения
- Холодильники
- Вентиляторы
- Пылесосы
- Компрессоры
Рекомендуемые аналоговые устройства и устройства питания
Шаговый двигатель
Шаговый двигатель изменяет положение ротора ступенчато, переключая диаграмму напряжения, которая прикладывается к обмотке статора.Поскольку количество переключений диаграммы напряжения и угол поворота диаграммы напряжения находятся в точной пропорции, положение можно контролировать без какой-либо обратной связи. К недостаткам шагового двигателя относятся небольшой крутящий момент, неспособность справляться с резкими изменениями нагрузки и подверженность вибрации, которая снижает эффективность.
Шаговые двигатели
можно разделить на следующие три основных типа.
- Переменное сопротивление (VR): Также называется реактивным электродвигателем с регулируемым сопротивлением (электродвигатель SR).Это низкая стоимость, потому что нет магнита, но недостатком является низкая эффективность.
- Постоянный магнит (PM): поскольку используется постоянный магнит, крутящий момент и эффективность относительно высоки. Кроме того, положение можно удерживать, даже когда ток не течет.
- Hybrid (HB): объединяет типы VR и PM для двигателя с хорошим разрешением, относительно крутящим моментом и эффективностью.
Существует четыре основных типа вождения.
- Однофазное возбуждение: Приводится путем пропускания тока через любую однофазную обмотку по порядку.
- Двухфазное возбуждение: управляет, пропуская ток через любую двухфазную обмотку по порядку.
- Однофазное возбуждение: объединяет однофазное возбуждение и двухфазное возбуждение для увеличения угла шага в два раза.
- Microstep: управляет ступенчатым углом с высоким разрешением за счет синусоидального изменения величины тока, подаваемого на каждую фазу.
Приложения
- Аппаратура автоматизации делопроизводства
- Камеры
- Промышленное оборудование
В чем разница между двигателем постоянного тока и двигателем переменного тока? — Kinmore Motor
Двигатель постоянного тока
Двигатели постоянного тока питаются от источника постоянного тока (DC) и представляют собой машины с механической коммутацией.Двигатели постоянного тока имеют индуцированную напряжением вращающуюся обмотку якоря и невращающуюся обмотку каркаса поля якоря, которая представляет собой статическое поле или постоянный магнит.
В двигателях постоянного тока используются различные соединения двигателя обмотки возбуждения и якоря для обеспечения различного регулирования скорости и крутящего момента. В отличие от двигателей переменного тока, скорость двигателя постоянного тока можно регулировать внутри обмотки, изменяя напряжение, подаваемое на якорь двигателя постоянного тока, или регулируя ток корпуса возбуждения.
Большинство двигателей постоянного тока сегодня производятся для управления с помощью промышленных электронных приводов постоянного тока.Двигатели постоянного тока по-прежнему используются во многих приложениях по всему миру, например, в машинах для производства бумаги и прокатных станках для сталеплавильных заводов.
Двигатель постоянного тока и двигатель переменного тока
Двигатель переменного тока
Статор двигателя переменного тока имеет катушки, на которые подается переменный ток и которые создают вращающееся магнитное поле. Ротор двигателя переменного тока вращается внутри катушек электродвигателя и прикреплен к выходному валу, который передает крутящий момент посредством вращающегося магнитного поля. Есть два разных типа двигателей переменного тока, в каждом из которых используются разные типы роторов.Первый тип двигателя переменного тока называется асинхронным двигателем (также известный как асинхронный двигатель).
Асинхронный двигатель использует магнитное поле на роторе асинхронного двигателя, которое создается индуцированным током. Другой тип двигателя переменного тока называется синхронным двигателем и вращается точно с частотой питания или с частотой, кратной частоте питания.
Синхронные двигатели могут работать с точной частотой питания, поскольку они не реагируют на индукцию.Магнитное поле синхронного двигателя создается током, подаваемым через контактные кольца или постоянный магнит. Синхронные двигатели работают быстрее, чем асинхронные двигатели, потому что скорость уменьшается из-за скорости скольжения асинхронных двигателей.
Двигатель постоянного тока и двигатель переменного тока
ЗАКЛЮЧЕНИЕ
Двигатель постоянного тока широко используется в тех областях, где скорость двигателя требует внешнего управления. Двигатели переменного тока наиболее подходят для применений, где требуются длительные энергетические характеристики. Все двигатели постоянного тока однофазные, но двигатели переменного тока могут быть однофазными или трехфазными.
Двигатели переменного и постоянного тока используют тот же принцип использования обмотки якоря и магнитного поля, за исключением двигателей постоянного тока, якорь вращается, а магнитное поле не вращается. В двигателе переменного тока якорь не вращается, а магнитное поле постоянно вращается.
В некоторых приложениях сегодня электродвигатели постоянного тока заменены объединением электродвигателя переменного тока с электронным регулятором скорости, известным как частотно-регулируемый привод. Двигатели постоянного тока заменяются двигателем переменного тока и электронным регулятором скорости, поскольку это более экономичное и менее дорогое решение.
Двигатель постоянного тока имеет много движущихся частей, замену которых дорого, а техническое обслуживание двигателя постоянного тока обычно более конкурентоспособно, чем при использовании нового двигателя переменного тока с электронным контроллером.
Что касается технического обслуживания, то чаще всего используются двигатели переменного тока, поскольку легкая доступность источника питания переменного тока Двигатель постоянного тока вызывает постоянные проблемы технического обслуживания.
Двигатели постоянного тока и двигатели переменного тока (абсолютная разница)
Я расскажу о принципе работы и разнице между двигателем постоянного и переменного тока самым простым и понятным образом.
На рисунке выше изображена простейшая физическая модель двигателя постоянного тока.
W Принцип работы
Двигатель постоянного тока
- Ток источника питания постоянного тока течет вдоль положительного полюса источника питания к левой стороне щетки.
Щетка и коммутатор трутся друг о друга.
Ток протекает через левый коммутатор (который имеет два левого и правого сегмента коммутатора), который течет в катушку и вытекает с правой стороны катушки.
После того, как правый коммутатор и правая щетка возвращаются к отрицательному полюсу источника питания, образуется замкнутый контур.
- Поскольку катушка находится в магнитном поле главного магнитного полюса (N и S на рисунке), катушка подвергается воздействию электромагнитной силы.
Две стороны катушки различаются направлением тока (ток слева течет внутрь и наружу справа), поэтому две стороны катушки подвергаются воздействию электромагнитных сил противоположных величин.
Эти две электромагнитные силы просто образуют электромагнитный момент.
При воздействии электромагнитного момента катушка начинает вращаться.
В двигателе постоянного тока катушка встроена в паз ротора, и двигатель начинает вращаться.
- Левая и правая реверсивные части вращаются вместе с вращающимся валом, а щетка фиксируется.
После одного оборота катушка справа переместится влево, а катушка слева — вправо.
Однако из-за наличия коммутатора ток в катушке с левой стороны течет в том же направлении, что и ток в катушке с левой стороны, поэтому направление принимаемой электромагнитной силы такое же, и правая сторона тоже такая же.
Следовательно, с точки зрения пространства, направление электромагнитной силы, воспринимаемой на стороне катушки в одном и том же положении, является постоянным, что обеспечивает циклическое вращение двигателя.
- Но для катушки, поскольку магнитное поле отличается, когда катушка поворачивается в разные положения, электромагнитная сила катушки также изменяется.
Поэтому катушка крутится нестабильно и резко тормозит.
Следовательно, можно обеспечить равномерное и стабильное усилие катушки путем установки множества катушек.
Тогда получаем следующее:
Даже такая модель мотора.
Кроме того, два внешних магнитных полюса на самом деле являются электромагнитами, создаваемыми катушками возбуждения.
В маленьких двигателях есть постоянные магниты, а в чуть более крупных — электромагниты.
Модель — это всего лишь модель, но настоящий ротор двигателя такой.
Двигатель переменного тока
Двигатели переменного тока
делятся на синхронные и асинхронные.
Синхронный двигатель в основном используется в качестве генератора, а асинхронный двигатель в основном является электродвигателем.
В основном я говорю об асинхронных двигателях.
Поскольку асинхронный двигатель имеет простую конструкцию, низкую цену, удобное обслуживание и надежную работу, он получил широкое распространение.
Хотя двигатель переменного тока имеет простую конструкцию, принцип работы на самом деле сложнее, чем у двигателя постоянного тока.
Если вы хотите четко разобраться, будет сложнее.
Трехфазный симметричный переменный ток подается на статор двигателя переменного тока, как показано на рисунке выше.
Статор не движется, и только изменение тока может создать вращающееся синтетическое магнитное поле.
Это магнитное поле действует как магнит, вращающийся вокруг статора.
С этим вращающимся магнитом все просто.
Замкнутая катушка помещается внутри статора, и в замкнутой катушке индуцируются электродвижущая сила и ток, и создается электромагнитная сила.
Замкнутая катушка повернется.
Это тоже можно понять таким образом.
На статоре есть вращающийся магнит. Катушка включения ротора на самом деле является электромагнитом из-за индукционной зарядки.
Когда внешний электромагнит вращается, он будет вращаться вместе с электромагнитом внутри, и вращается ротор двигателя переменного тока.
Скорость вращения магнитного поля статора называется синхронной скоростью.
Внутренний ротор фактически приводится в движение магнитным полем статора, поэтому его скорость будет меньше, чем магнитное поле статора, поэтому это называется асинхронной скоростью.
Так называется асинхронный двигатель.
Ротор двигателя переменного тока представляет собой такую простую замкнутую катушку или замкнутый проводник.
Подобно клетке для крыс, его еще называют асинхронным двигателем.
Кроме того, поскольку электродвижущая сила и ток внутри ротора индуцируются магнитным полем статора, асинхронный двигатель называется асинхронным двигателем.
Таким образом, трехфазный асинхронный двигатель имеет много разных названий: двигатель переменного тока, асинхронный двигатель, асинхронный двигатель — все говорят об этом.
Это название дано под другим углом.
Если хотите узнать больше, можете задавать вопросы в комментариях, я постараюсь ответить на них подробно.
ошибка 404
DE
английский
Открытый выбор страны и языка
Закрыть
Закрыть выбор страны и языка
Выбор страны и языка
Вы уже вошли в систему.Вы можете изменить языковые настройки в разделе «Личные данные».
Страна / регион
Если вы выберете другую страну / регион, вы можете потерять несохраненные данные, например в корзине.
[# / languages.languages.length #] [# country #] [# /languages.length #].
[# # languages.length #] Хотите перейти на сайт [# country #]
? [# /languages.length #]
[# # languages.length #]
Язык
[# #languages #]
[# название #]
[# / languages #]
[# / languages.длина #]
[# #адрес #]
[#. #]
[# /address.lines #]
[# # address.tel #]
тел. [# address.tel #]
[# /address.tel #]
[# # address.fax #]
Факс: [# address.fax #]
[# /address.fax #]
[# #адрес.электронное письмо #]
Электронная почта: [# address.email #]
[# /address.email #]
[# # address.url #]
На сайт
[# /address.url #]
[# /адрес #]
[# # languages.length #]
[# /languages.length #]
[# /поддерживается #]
[# #продажи #]
[# имя #] обслуживается дилером по адресу [# адрес.страна №] ..
[# #адрес #]
[# # address.lines #][#. #]
[# /address.lines #]
[# # address.tel #]
тел. [# address.tel #]
[# /address.tel #]
[# # address.fax #]
Факс: [# address.fax #]
[# /адрес.факс №]
[# # address.email #]
Электронная почта: [# address.email #]
[# /address.email #]
[# # address.url #]
На сайт
[# /address.url #]
[# /адрес #]
[# /продажи #]
[# #sales_partner #]
[# name #] обслуживается партнером по продажам в [# sales_partner.country #] ..
[# #адрес #]
[# # address.lines #][#. #]
[# /address.lines #]
[# # address.tel #]
тел. [# address.tel #]
[# /address.tel #]
[# # address.fax #]
Факс: [# address.fax #]
[# /address.fax #]
[# #адрес.электронное письмо #]
Электронная почта: [# address.email #]
[# /address.email #]
[# # address.url #]
На сайт
[# /address.url #]
[# /адрес #]
[# / sales_partner #]
[# #service_partner #]
[# name #] обслуживается партнером по обслуживанию в [# service_partner.country #] ..
[# #адрес #]
[# #адрес.строки #][#. #]
[# /address.lines #]
[# # address.tel #]
тел. [# address.tel #]
[# /address.tel #]
[# # address.fax #]
Факс: [# address.fax #]
[# /address.fax #]
[# # address.email #]
Электронная почта: [# address.email #]
[# /адрес.электронное письмо #]
[# # address.url #]
На сайт
[# /address.url #]
[# /адрес #]
[# / service_partner #]
[# #sales_service_partner #]
[# name #] обслуживается партнером по продажам и обслуживанию в [# sales_service_partner.country #] ..
[# #адрес #]
[# #адрес.строки #][#. #]
[# /address.lines #]
[# # address.tel #]
тел. [# address.tel #]
[# /address.tel #]
[# # address.fax #]
Факс: [# address.fax #]
[# /address.fax #]
[# # address.email #]
Электронная почта: [# address.email #]
[# /адрес.электронное письмо #]
[# # address.url #]
На сайт
[# /address.url #]
[# /адрес #]
[# / sales_service_partner #]
[# #recommended_dealer #]
[# name #] обслуживается Рекомендованным дилером в [# Recommended_dealer.country #] ..
[# #адрес #]
[# # address.lines #][#.#]
[# /address.lines #]
[# # address.tel #]
тел. [# address.tel #]
[# /address.tel #]
[# # address.fax #]
Факс: [# address.fax #]
[# /address.fax #]
[# # address.email #]
Электронная почта: [# address.email #]
[# /address.email #]
[# #адрес.url #]
На сайт
[# /address.url #]
[# /адрес #]
[# / Recommended_dealer #]
[# #место расположения #]
Контактные данные от [# name #]:
[# #адрес #]
[# # address.lines #][#. #]
[# /address.lines #]
[# #адрес.тел #]
тел. [# address.tel #]
[# /address.tel #]
[# # address.fax #]
Факс: [# address.fax #]
[# /address.fax #]
[# # address.email #]
Электронная почта: [# address.email #]
[# /address.