Классификация сау по другим признакам. Классификация сау
Классификация САУ и законы управления
САУ можно классифицировать по классам и принципам действия.
По классам дифференциальных уравнений:
Линейными системами называются систмы, описываемые линейными дифференциальными уравнениями, в противном случае система входит в класс нелинейных. Линейные и нелинейные дискретные системы описываются соответсвеннно линейными и нелинейными разностными уравнениями или системами разностных уравнений.
Линейные и нелинейные стационарные системы описываются дифференциальными уравнениями с постояными коэффициентами, а нестационарные системы с переменными коэффициентами.
Сосредоточенные системы или системы со средоточенными параметрами, описываются обыкновенными дифференциальными уравнениями.
Распределенныесистемы или системы с распределенными параметрами, описываются дифференциальными уравнениями в частных производных.
Существуют два закона управления: по отклонению выходной велины и по возмущению.
САУ по отклонению – принцип И.И.Ползунова, предложенная им в 1765г. В настоящее время используется в 90% промышленных САУ.
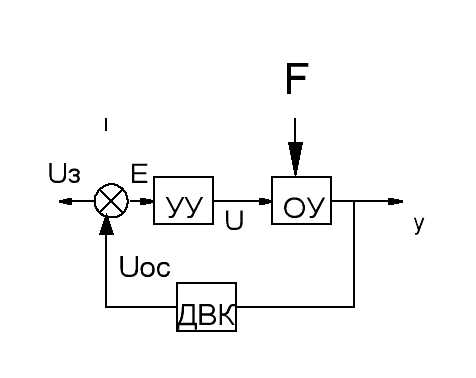
Достоинством САУ по отклонению является то, что она компенсирует влияние любого возмущающего воздействия, которое вызвало изменение значения ее выходного сигнала у от заданного значения. Это изменение фиксирует датчик и через цепь отрицательной обратной связи, сигнал контролируемого параметра поступает на вход сравнивающего устрйства, которое, в свою очередь, вырабатывает сигнал отклонения ε = х - хос , поступающего на регулятор (рисунок 1.3). Недостаток состоит в том, что сначала должно появиться отклонение ε выходного сигнала у (параметра) от заданного ззначения и только затем регулятор компенсирует возмущающе воздействие.
Рисунок 1.3 - Структурная схема САУ по отклонению
САУ по возмущению – принцип Ж.Понселе, предложеннй им в 1830г. Если f возмущающее действие на объект, его измеряют и подают на регулятор для сравнения с заданным значением и выработки управляющего сигнала, изменяющего значение входного сигнала (рисунок 1.4).
Рисунок 1.4 - Структурная схема САУ по возмущению
При таком принципе управления изменение возмущающего воздействия компенсируется регулятором до того, как оно нарушит технологический режим работы объекта. Однако есть существенный недостаток – неспособность компенсировать влияние других возмущающих воздействий.
САУ по возмущению является разомкнутой, т.е. без обратной связи по выходному сигналу.
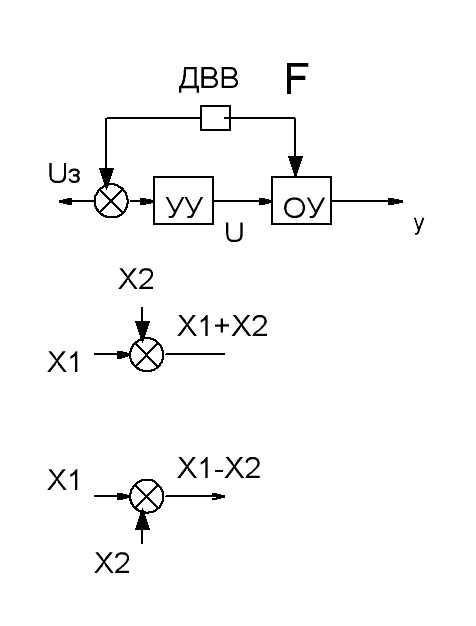
Комбинированные САУ совмещают оба закона управления и лишены многих недостатков рассмотренных схем (рисунок 1.5).
Рисунок 1.5 - Структурная схема комбинированной САУ
По закону изменения выходного сигнала задатчика различают САУ стабилизации, программные и следящие.
По закону изменения выходного сигнала регулятораразличают САУ дискретные (двух, трехпозиционные) и непрерывные (аналоговые).
Двухпозиционные (вкл. – выкл.) САУ надежны (холодильные установки), дешевы, но мала точность регулирования.
Похожие статьи:
poznayka.org
Виды и классификация сау.
Понятие об управлении и САУ. Классификация САУ.
Управлением называется целенаправленное воздействие на объект с целью уменьшения неопределенности его состояния.
Объект управления (ОУ) совместно с управляющим устройством образует систему управления(СУ).
УУ-управляющее устройство.
У – выходная координата
F- воздействие
Uз-заданное значение выходной координаты
Если система функционирует без учета человека,то она называется системой автоматического управления (САУ).
Курс ТАУ состоит из анализа и синтеза САУ
Под анализом понимаем определение динамических и статических свойств систем, установок и т.д.
Под синтезом понимается определение структуры и параметров управляющего устройства, обеспечивающего заданные статические и динамические показатели ситем.
Под структурой понимается вид диф.уравнения или вид передаточных функций, описывающие поведение УУ.
Под параметрами понимают определенные численные значения коэффицментов диф.уравнений или коэффициентов полинома передаточной функции.
По способу построений все системы можно разделить на разомкнутые и замкнутые.
Разомкнутые – системы в которых управление не зависит от входной координаты или возмущающего воздействия.
Замкнутые – системы в которых управление зависит от выходной координаты или возмущающего воздействия.
ДВ-Датчик возмущающего воздействия
ДВК-датчик выходных координат
Теорема автоматического управления рассматривает только замкнутые системы.
Диапазон 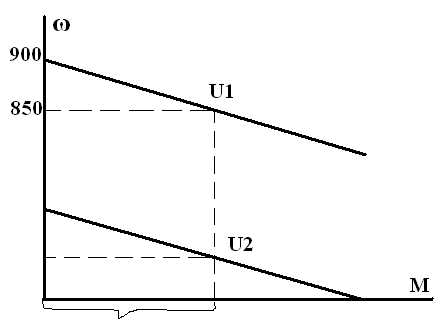
Замкнутые системы делятся на: системы стабилизации (стабилизация частоты вращения; температуры), программные (выходная координата должна изменяться по определенному закону, программе ,функции, времени).
Следящей системой – выходная координата должна изменяться в соответствии с задающим сигналом, закон изменения которого заранее неизвестен.
По способу передачи сигнала все системы делятся на непрерывные и дискретные.
В непрерывных системах сигнал может изменяться в любой момент времени и принимать любые значения.
В дискретных системах сигнал не может изменяться в любой момент времени и принимать любые значения.
Системы построенные с помощью микропроцессоров называются дискретными.
По зависимости между входными и выходными сигналами все системы делятся на линейные и нелинейные. Строго говоря в чистом виде линейных систем не существует.
По цели функционирования все системы делятся на обычные и оптимальные.
Перед любой системой автоматического управления прежде всего ставится задача чтоб она выполняла свое основное функциональное значение.
Оптимальная – такая система которая основное функциональное назначение наилучшим образом с точки зрения критерия качества.
Все системы делятся на системы с жесткой и гибкой настройкой(адаптированные системы).
В системе с жесткой настройкой структура и параметры управляющего устройства не изменялись в процессе функционирования.
В системе с гибкой настройкой могут изменяться структура и параметры управляющего устройства.
Особый класс систем составляющей системы экстремального управления(СЭУ).
СЭУ могут быть построены для объектов в которых выходные величины могут иметь экстремальную зависимость от входной.
Целью функционирования СЭУ являются поддержание режимов работы объекта в точках экстремума.
Принцип построения замкнутых САУ
По возмущению.
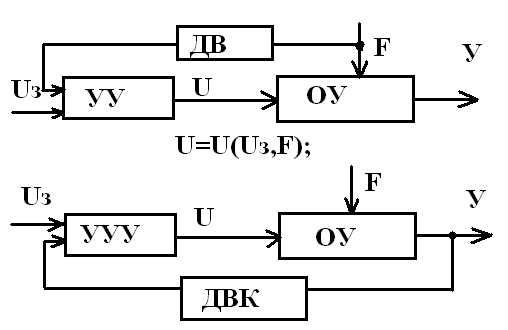
Система по возмущению выглядит следующим образом:
Связь по возмущению всегда +
U=U(U3,F).
Система по возмущению ограничена в применении т.к для
получения высоких статических свойств при большом диапазоне
регулирования требуется измерение всех возможных воздействий, что
на практике затруднительно в реале невозможно.
По отклонению-
Система по отклонению выглядит следующим образом:
Uос- Обратная связь
У выходной координаты главная отрицательная связь
Всегда отрицательна.
E- ошибка регулирования—разность между
задающим сигналом и сигналом обратной связи.
E=Uз-Uос= Uз-jy
Достоинстватаких систем является то, что они регулируют на сам факт отклонения выходной координаты от задающего значения. Они находят широкое применение на практике.
studfiles.net
0.1 Классификация сау
0.1.1 Классификация сау по принципу действия
САУ подразделяются на
В разомкнутых САУ управляющее воздействие задаётся на основании цели управления, характеристик объекта и известных внешних воздействий, но без учёта истинного значения управляемой переменной. Если на рис. 0.1 разорвать ОС, то получится разомкнутая САУ. Она будет разомкнутой как при наличии, так и при отсутствии штриховой линии. Поскольку в этих САУ осуществляется компенсация известных внешних возмущений, то этот принцип управления называется управлением по возмущению.
В замкнутых САУ управляющее воздействие формируется в непосредственной зависимости от управляемой переменной. Этот принцип управления называется управлением по отклонению ( ). Если на рис. 0.1 разорвать штриховую линию, то получится система с управлением по отклонению.
). Если на рис. 0.1 разорвать штриховую линию, то получится система с управлением по отклонению.
Если одновременно используются оба принципа управления (по возмущению и отклонению), то такая система называется системой комбинированного принципа действия (комбинированной системой). Комбинированной является вся система на рисунке 0.1.
0.1.2 Классификация сау по характеру изменения выходной переменной
САУ подразделяются на
системы стабилизации;
системы программного регулирования;
следящие системы.
Системой стабилизации называют такую САУ, которая поддерживает постоянное значение управляемой переменной ( ).
).
Системой программного регулирования называется такая САУ, которая изменяет выходную переменную по заранее заданному закону  .
.
Следящими называются такие САУ, которые воспроизводят изменение управляемой переменной в соответствии с изменением задающего воздействия с неизвестным законом изменения.
0.1.3 Классификация сау по математическому описанию
САУ состоит из ряда звеньев. У каждого звена может быть одно или несколько входных воздействий (входные переменные) и одна или несколько выходных переменных. Каждое звено описывается алгебраическими и (или) дифференциальными, и (или) разностными уравнениями. Если подать на звено входной сигнал, то в выходном сигнале возникает переходный процесс. Если звено устойчивое, то при постоянном входном сигнале через некоторое время устанавливается постоянный выходной сигнал. Зависимость выходного сигнала от входного в установившемся режиме называется статической характеристикой данного звена.
Основными признаками классификации являются:
непрерывность или дискретность динамических процессов во времени;
линейность или нелинейность уравнений, описывающих динамику процессов в звеньях.
Системой непрерывного действия называется такая САУ, в каждом звене которой при непрерывном входном воздействии выходная переменная также является непрерывной.
Ниже приведены статические характеристики непрерывных звеньев.
Рисунок 0.1.3.1 – Примеры статических характеристик непрерывных звеньев. х, у – входной и выходной сигналы
Цифровой называется такая САУ, в которой имеется хотя бы одно звено, у которого при непрерывном входном сигнале выходной сигнал имеет вид последовательности импульсов. Такое звено называется импульсным. (Рис. 2).
Линейной называется САУ, в которой в каждом звене выходные сигналы линейно связаны с входными сигналами.
Рисунок 0.1.3.2 – Импульсное звено. х, у – входной и выходной сигналы
Нелинейной называется САУ, в которой имеется хотя бы одно звено с нелинейной зависимостью между входным и выходным сигналами.
Особым подклассом нелинейных систем являются релейные системы.
Релейной называется такая САУ, в которой хотя бы в одном звене при непрерывном изменении входной переменной выходная переменная в некоторых точках процесса, зависящих от значения входной переменной, изменяется скачком.
Рисунок 0.1.3.3 – Примеры статических характеристик релейных звеньев. х, у – входной и выходной сигналы
studfiles.net
Классификация САУ. Математическое описание линейных стационарных САУ.
Классификация САУ.
Классификация САУ может проводиться по ряду признаков. Так в зависимости от информации о задающем воздействии САУ делятся на системы стабилизации, программного регулирования и системы зависимого управления. (см. рис. 23)
В зависимости от установившегося сигнала ошибки системы делятся на статические и астатические. (см. рис.24)
По числу регулируемых величин системы делят на одномерные и многомерные. (см. рис. 25)
Классификация может осуществляться и по другим признакам. Очевидно, что поведение систем с непрерывным временем дифференциальными уравнениями. Если САУ описываются линейными дифференциальными уравнениями, то такие системы называют линейными. Они могут быть линейными стационарными или нестационарными, с распределенными или сосредоточенными параметрами. (см. рис.26)
В данном курсе основное внимание будет уделено линейным стационарным САУ с сосредоточенными параметрами.
Задачи ТАУ.
Основными задачами ТАУ являются исследования статических (в общем случае установившихся) и динамических свойств САУ и разработка систем удовлетворяющих заданным техническим требованиям.
Исследование процессов работы САУ с заданной структурой, заданными параметрами при различных значениях параметров и различных входных воздействиях составляет содержание задачи анализа. Это задачи оценки устойчивости и определении статических и динамических отклонений, т.е. исследования процессов управления.
Задача синтеза рассматривает построение управляющих устройств, обеспечивающих выполнение требований, предъявляемых к САУ. Здесь проводится выбор схемы управляющего устройства, определение его отдельных элементов и их параметров. Эта задача значительно сложнее задачи анализа.
Математическое описание линейных стационарных САУ.
Системы автоматического управления состоят из отдельных элементов (см. рис.27). Эти элементы имеют входные и выходные величины. Изменение этих величин характеризует работу САУ. Процессы изменения величины описываются дифференциальными уравнениями.
В данном курсе мы будем рассматривать только элементы и системы, описываемые обыкновенными дифференциальными уравнениями, т.е. соотношениями вида
Эта зависимость определяет общий вид дифференциального уравнения. Важный класс систем составляют линейные САУ. Это системы, в состав которых входят только линейные элементы. В свою очередь линейным называют такой элемент, для которого уравнение (1) будет линейным, т.е. оно имеет вид
В уравнении (2) коэффициенты ai, i=0,n, bj, j=0,m могут быть функциями вермени. Это означает, что свойства элементов с течением времени изменяются. В этом случае говорят о нестационарном линейном элементе. Если в САУ хотя бы один элемент не стационарный, то и вся система не стационарна. Если коэффициенты ai, i=0,n, bj, j=0,m – постоянные, то линейные элементы являются стационарными. Система, состоящая из таких элементов, называется линейной стационарной САУ. Именно такие системы мы и будем рассматривать далее.
Таким образом, объектом нашего курса будут линейные стационарные САУ. Это системы, внутренние свойства которых не меняются с течением времени. Такие системы описываются линейными дифференциальными уравнениями с постоянными коэффициентами. Нелинейную систему, описываемую нелинейными дифференциальными уравнениями, стремятся, по крайней мере на начальных этапах исследования свести (приближенно заменить) к близкой к ней линейной системе.
Рассмотрим важнейшее свойство линейных САУ. Пусть X- входная, а Y- выходная величина системы (см.рис. 28).
Дифференциальное уравнение, связывающее X и Y, в общем случае имеет вид
Очевидно (это следует из теории дифференциальных уравнений), что решение этого уравнения X(t) определяется функцией Y(t) (входным задающем воздействием), а также начальными условиями
Пусть
Обозначим X(t) решение уравнения (3), соответствующее входному сигналу Y(t) и ненулевым начальным условиям
Обозначим Xн(t)-решение (3), соответствующее Y(t)º0 и начальным условиям (4), X1(t)- решение (3), соответствующее входному сигналу Y1(t) и нулевым начальным условиям, X2(t)- решение (3) при входном сигнале Y2(t) и нулевых начальных условиях, X3(t)- решение (3), соответствующее Y(t) и нулевым начальным условиям. Тогда
Выражение (5) выражает собой принцип суперпозиции. Из него следует, что реакция системы на внешнее воздействие равно той же линейной комбинации реакции системы на каждое воздействие. Из (6) следует, что для определения процесса на выходе САУ при наличии сигнала на входе и ненулевых начальных условиях можно отдельно рассчитать процессы, соответствующие входному сигналу и начальным условиям, после чего общий процесс определяется как сумма этих реакций.
Использование этих свойств существенно облегчает исследование линейных САУ.
Похожие статьи:
poznayka.org
Классификация САУ
Количество просмотров публикации Классификация САУ - 16
Основным классификационным признаком САУ является используемый для её построения принцип управления (см. раздел 2.1). При ϶том существует ещё ряд признаков, которые используются для классификации систем управления.
2.2.1. По характеру изменения задающᴇᴦο воздействия (цели управления)
В зависимости от характера изменения задающᴇᴦο воздействия x(t) системы управления делятся на [1, 8-10, 16]:
1) обычные САУ, к которым относятся:
- САУ автоматической стабилизации;
- САУ программного регулирования;
2) следящие САУ.
В обычных САУ значение или закон изменения задающᴇᴦο воздействия x(t) заранее известны, заданы, а целью управления является обеспечение соответствующᴇᴦο значения или закона изменения управляемой величины y(t).
В системах автоматической стабилизации задающее воздействие представляет собой постоянную величину. Областью применения таких САУ являются непрерывные технологические процессы, в которых управляемый параметр нужно поддерживать в постоянном значении. В системах программного управления задающее воздействие является заранее известнои̌ функцией времени (изменяется по закону, заданному программой). Такие системы оснащаются программными задатчиками, формирующими задающее воздействие, изменяющееся во времени (см., например, САУ температурой электронагревательного элемента на рис. 7). Область применения: управление периодическими процессами.
Все примеры САУ, рассмотренные в разделе 2.1, относятся к классу обычных САУ.
Особой разновидностью САУ являются следящие системы, в которых задающее воздействие представляет собой неизвестную заранее функцию времени, связанную с внешним, по отношению к системе управления параметром, который может изменяться случайным образом, а целью управления является воспроизведение ϶того случайного закона управляемой величинои̌ y(t) [1, 8-10]. Такие САУ применяются для управления одним технологическим параметром (ведомым) исходя из значения иного технологического параметра (ведущего), изменяющегося произвольно – например, управление расходом воздуха, подаваемого на горелку, исходя из расхода топлива; воспроизведение одним устройством перемещения иного устройства без механической связи между ними и т.п.
Пример следящей САУ соотношением расходов показан на рис. 18. Управляемым (ведомым) параметром является величина расхода FB рег входного потока В на подаче в аппарат, регулирование которой осуществляется в заданном соотношении n с ведущим расходом – расходом потока А (см. рис. 18). Заметим, что в рассматриваемом примере величина соотношения n жестко задается функцией вычислительного устройства 3. В случае, в случае если величина соотношения по условиям процесса может изменяться, используют регуляторы соотношения расходов с настраиваемой при помощи органов настройки регулятора величинои̌ соотношения, или регуляторы с внешним заданием n [1].

Структурная схема САУ управления соотношением расходов по отклонению показана на рис. 19. В качестве задающᴇᴦο узла, формирующᴇᴦο задающее воздействие x(t) исходя из ведущᴇᴦο расхода FА, изменяющегося случайным образом, выступают ТСА 2 и 3. Величина рассогласования, вычисляемая по цепи обратнои̌ связи, равна:
.
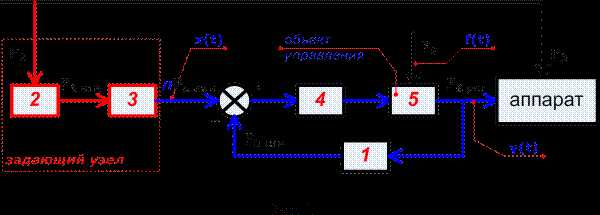
Следящие системы управления, так же как и обычные САУ, могут быть реализованы с использованием любого из принципов управления или их комбинации [1, 8-10]. Рассмотренный пример (см. рис. 18 и рис. 19) представляет собой систему, реализованную по принципу обратнои̌ связи (управление по отклонению).
Рассмотрим пример следящей САУ, реализующей комбинированное управление, на примере схемы автоматизации хлорирования воды (рис. 20). Целью управления является регулирование подачи хлора (ведомый параметр) исходя из изменяющегося расхода поступающей на хлорирование воды (ведущий параметр). Заданное соотношение расходов обеспечивается регулятором 7, который изменяет положение регулирующᴇᴦο клапана, установленного на линии подачи хлора из дозатора в эжектор. Размещено на реф.рфПризнаком реализации рассматриваемой САУ по комбинированному варианту является использование в контуре управления контроля возмущения – измерения концентрации остаточного хлора в обработаннои̌ воде. Доза подаваемого хлора, определенная соотношением расходов, корректируется регулятором 7 исходя из остаточнои̌ концентрации.
Кроме контура управления в схеме, приведеннои̌ на рис. 20, реализован автоматический контроль давления воды в подающем трубопроводе (датчик 1 и преобразователь 2) с индикацией текущих показаний и световой сигнализацией при достижении давлением нижнᴇᴦο допустимого предела (прибор 3) [2, 18].

2.2.2. По принципу формирования сигналов управления
По принципу формирования сигналов управления различают следующие разновидности САУ [1, 8]:
1) САУ с непрерывным (аналоговым) управлением, в которых сигналы управления x(t), e(t) или z(t) представляют из себянепрерывную функцию времени (рис. 21–а) и на любом ограниченном временном интервале могут иметь неограниченное число состояний;
2) САУ с дискретным управлением, в которых сигнал управления на любом ограниченном временном интервале может иметь конечное, фиксированное число состояний.

Для источников аналоговых сигналов характерна бóльшая, чем у дискретных, чувствительность к помехам и инструментальным погрешностям преобразователей (дрейф нуля, температурные колебания коэффициентов усиления и т.п.). Источники дискретных сигналов лишены этих недостатков, так как образующие их элементы работают не в усилительном, а в релейном режиме, по϶тому дискретные сигналы обеспечивают бóльшую надежность при передачи на большие расстояния.
САУ с дискретным управлением делятся на цифровые, импульсные и релейные.
В цифровых САУ используется дискретное преобразование первичного непрерывного сигнала, которое называется квантованием по уровню, и сводится к замене бесконечного числа исходных значений конечным числом уровней (рис. 21–б). Разность уровней называется шагом квантования по уровню Ds. Пока значение исходного непрерывного сигнала не изменится на величину, равную шагу квантования, преобразователь фиксирует предыдущее значение уровня. Разрядность современных цифровых устройств позволяет использование столь малых значений шага квантования по уровню, что погрешности такого представления становятся пренебрежимо малыми. После квантования цифровой сигнал подвергается кодированию – значение каждой величины уровня выражается цифровым кодом (числом). В цифровых САУ соответствующую форму обычно имеют задающее воздействие x(t), и, после преобразования, сигналы в обратных связях. Цифровой сигнал рассогласования e(t) должна быть преобразован в непрерывное управляющее воздействие z(t).
В импульсных САУ используется квантование по времени – замена бесконечного числа значений исходного непрерывного сигнала конечным числом ᴇᴦο значений, фиксируемых через определенный промежуток времени Dt – шаг квантования по времени (рис. –а). В зависимости от того, какая характеристика последовательности – амплитуда импульсов (см. рис. –а), частота следования импульсов (рис. –б) или ширина импульсов (рис. 23–а) – пропорциональна величине входного сигнала, различают типы модуляции импульсных сигналов.

В релейных САУ управляющее воздействие формируется с использованием релейных регуляторов, у которых при непрерывном изменении входнои̌ величины регулирующий орган занимает ограниченное число положений. На рис. 23–б приведена характеристика двухпозиционного регулятора с зонои̌ неоднозначности, у которого исходя из величины непрерывно изменяющегося задающᴇᴦο воздействия x(t) регулирующий орган занимает одно из двух возможных положений, определяемых двумя значениями управляющᴇᴦο воздействия – zmax и zmin. У такого регулятора, исходя из знака и величины задающᴇᴦο воздействия, регулирующий орган или полностью открыт (приток вещества или энергии максимальный), или полностью закрыт (приток вещества или энергии равен нулю). Примерами двухпозиционных устройств являются электроконтактный термометр, пневматическое реле и т.п.

В практике управления сложными объектами ТГВ непрерывное и дискретное управление используют совместно [1, 2, 10, 16].
2.2.3. По числу контуров управления
Данный классификационный признак характеризует структурную сложность САУ. В соответствии с ним САУ делятся на одноконтурные и многоконтурные [1].
В одноконтурных САУ управляющее воздействие является функцией единственного контролируемого параметра – управляемой величины в САУ по отклонению или возмущения в САУ по возмущению. Соответственно структура САУ имеет единственный контур общей обратнои̌ связи или контур компенсации.
Многоконтурные САУ имеют несколько независимых или связанных контуров управления, реализованных, например, с использованием местных обратных связей по параметрам, реагирующим на изменение управляющих воздействий быстрее, чем управляемая величина. Использование многоконтурного связанного регулирования позволяет улучшить качественные характеристики управления. Пример многоконтурнои̌ САУ приведен на рис. 16.
2.2.4. По характеру зависимости управляемых переменных от входных воздействий
По названному характеру зависимости САУ делятся на линейные и нелинейные.
Строго говоря, все практически реализуемые системы являются нелинейными. Однако, во многих случаях нелинейность рабочей характеристики системы является незначительнои̌, и система может рассматриваться как линейная. Пример несущественно нелинейнои̌ характеристики САУ с линейнои̌ аппроксимацией в ограниченнои̌ области рабочей точки показана на рис. 24–а.
В системах, обладающих значительнои̌ нелинейностью, для достижения требуемого качества управления необходимо учитывать нелинейность объекта управления и использовать нелинейные управляющие устройства. Нелинейные характеристики могут быть неоднозначными, в случае если при увеличении входного сигнала выходная величина изменяется по однои̌ зависимости, а при уменьшении входного сигнала – по другой. Пример неоднозначнои̌ нелинейнои̌ характеристики кусочно-линейного типа для релейного элемента САУ показан на рис. 23–б, а примеры гладких нелинейных характеристик – однозначнои̌ и неоднозначнои̌, приведены на рис. 24–б и рис. 24–в соответственно. Заметим, что характеристику вида, приведенного на рис. 24–б, следует относить к существенно нелинейным только в том случае, в случае если по условиям работы САУ она используется на всем своем протяжении.К примеру, такую форму зависимости носит величина рН от расхода реагента, её регулирующего.
Для существенно нелинейных систем характерна работа в режимах, неосуществимых в линейных системах: автоколебания, дискретные изменения сигналов и т.д. [8, 10]
2.2.5. По характеру изменения ошибки управления
Данный признак классификации характеризует различия результатов работы САУ в установившемся состоянии, после завершения переходного процесса. По характеру изменения ошибки управления (отклонения управляемой величины от заданного значения) различают статические и астатические САУ.
У статических САУ при постоянном задающем воздействии ошибка управления стремиться к постоянному значению, зависящему от величины возмущения, т.е. после завершения переходного процесса имеет место статическая ошибка управления.
Для характеристик работы статической САУ (рис. 25) выполняется следующее:
,
где x0 – постоянная величина (модуль) задающᴇᴦο воздействия после ᴇᴦο ступенчатого изменения в момент времени t0.
Как уже отмечалось, инерционность ТСА и ОУ обычно существенно больше, чем у источников задающих воздействий, по϶тому, после изменения задающᴇᴦο воздействия, которое можно приближенно считать близким к идеальнои̌ ступеньке, новое установившееся значение управляемой величины y(t) достигается плавно, за время переходного процесса tp. За ϶то же время динамическая ошибка управления D(t), имеющая максимальное значение в момент времени t0, убывает до конечного постоянного значения Dст, определяемого величинои̌ действующᴇᴦο возмущения(см. рис. 25):
При наличии возмущающих воздействий статические системы не могут точно стабилизировать управляемую величину. Разомкнутые САУ являются статическими в целом, по отношению к любым возмущениям. Системы управления по возмущению являются статическим по отношению к возмущениям, для которых не предусмотрен контур компенсации.
У астатических САУ при постоянном задающем воздействии с течением времени переходного процесса ошибка управления стремиться к нулю вне зависимости от величины возмущения, т.е. после завершения переходного процесса статическая ошибка управления отсутствует.
Для характеристик работы астатической САУ (рис. 26) выполняется следующее:
Системы управления по отклонению являются астатическими в целом, т.е. при действии любых возмущений, последствие действия которых на объект управления должна быть ликвидировано управляющим воздействием, после завершения переходного процесса статическая ошибка управления будет равна нулю. Комбинированные системы аналогичным образом являются астатическими в целом. Понятие и виды, 2018.Системы управления по возмущению обладают астатизмом только по отношению к возмущающему воздействию, для которого реализован контур компенсации.
Полная схема классификации систем автоматического управления по всем рассмотренным признакам приведена на рис. 27.
referatwork.ru
Классификация сау по другим признакам.
По приложению сил к регулятору (управляющий орган):
а) САУ прямого действия САУ, у которых управляющий сигнал непосредственно подается на ОУ. (статическое рис.1)
б) САУ непрямого действия САУ, в которых управляющий сигнал с регулятора подается на исполнительные устройства, а потом на ОУ (рис.2).
По количеству контуров в системе:
а) одноконтурные (имеющую одну главную обратную связь)
б) многоконтурные (имеющие местные обратные связи).
По связности системы:
а) односвязные САУэто САУ, в которых присутствует либо один регулятор, либо несколько регуляторов, взаимодействие которых учитывается в законе управления.
б) многосвязные САУ это САУ, в которых присутствует несколько регуляторов независимых друг от друга.
2,3,4 Системы статического и астатического регулирования.
Передаточная функция по отклонению
Система регулирования называется статической по отношению к возмущающему (управляющему) воздействию, если при воздействии стремящемся к установившемуся постоянному значению, отклонение регулируемой величины также стремится к постоянному значению, зависящему от величины воздействия.
Статической системе присуща статическая (установившаяся) ошибка.
Признаком статичности системы является выражение где Ф(p) – передаточная функция по отклонению.
Автоматическая система называется астатической по отношению к возмущающему (управляющему) воздействию, если при воздействии стремящемся к некоторому установившемуся постоянному значению отклонение регулируемой функции стремится к нулю вне зависимости от величины воздействия.
Одна и та же система может быть статической по отношению к возмущающему воздействию и астатической по отношению к управляющему воздействию.
Астатические системы могут быть I–го и более высокого порядков. На практике находят применение астатические системы I-го и II-го порядка. Признаком системы с астатизмом I-го порядка служит равенство или  В передаточной функции разомкнутой системы с астатизмом I–го порядка имеется 1 нулевой полюс
В передаточной функции разомкнутой системы с астатизмом I–го порядка имеется 1 нулевой полюс
В системе регулирования с астатизмом второго порядка 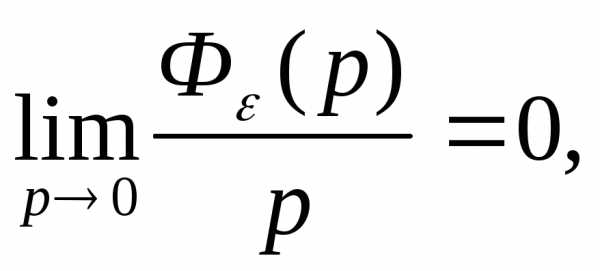
то есть имеется два нулевых полюса в передаточной функции разомкнутой системы
Наличие двух нулевых полюсов приводит к тому, что система становится структурно-неустойчивой, и для её стабилизации обязательно применение корректирующих устройств. Вместе с тем ясно, что скоростная ошибка такой системы равна нулю.
Порядок астатизма автоматической системы при введении корректирующих устройств может измениться, например статическая система может приобрести свойства астатической и наоборот.
Поэтому при проектировании автоматических систем выбор статической или астатической системы определяется конструктивными особенностями системы, свойствами объекта регулирования и его регулирующего органа, возможностями проектируемой системы и требованиями, предъявляемыми к ней.
5. Уравнение статики и динамики.
Статическим режимом (установившийся режим) называется режим, в котором при постоянном входном воздействии Х и возмущаемом воздействии Z управляемая величина y=f(x,z)
экстремальные
x=const по t
y=const по t
Д
 инамический режим, когда управляемая величинаy не является постоянной во времени и описывается следующим уравнением: y(t)=f(x(t), z(t), t)
инамический режим, когда управляемая величинаy не является постоянной во времени и описывается следующим уравнением: y(t)=f(x(t), z(t), t)
У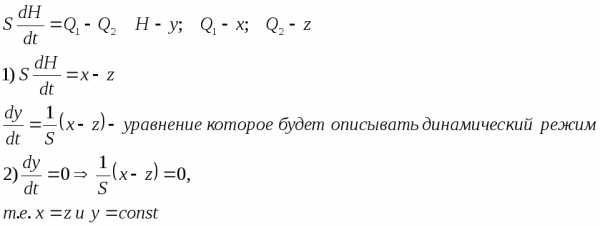 равнения называютсяуравнениями динамики, если они описывают изменения входящих в них переменных во времени. Из уравнений динамики обычно можно получить уравнения статики, если положить все входящие в них производные и воздействия равными нулю или некоторым постоянным величинам. Уравнения статики описывают поведение систем в установившемся режиме.
равнения называютсяуравнениями динамики, если они описывают изменения входящих в них переменных во времени. Из уравнений динамики обычно можно получить уравнения статики, если положить все входящие в них производные и воздействия равными нулю или некоторым постоянным величинам. Уравнения статики описывают поведение систем в установившемся режиме.
studfiles.net
Классификация САУ
Количество просмотров публикации Классификация САУ - 263
Учитывая зависимость отхарактера изменения задающего воздействия во времени САУ разделяют на три класса:
· стабилизирующие;
· программные;
· следящие.
Стабилизирующая САУ – система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянным:
x(t) ʼʼ xз = const.(1)
Знак ʼʼ означает, что управляемая величина поддерживается на заданном уровне с некоторой ошибкой.
Программная САУ – система, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией времени:
x(t) ʼʼ xз(t) = fп(t). (2)
Следящая САУ – система, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее неизвестной функцией времени:
x(t) ʼʼ xз(t) = fс(t). (3)
Комбинированная САУ – система, в которой входными воздействиями ее управляющего устройства являются как внешние (задающее и возмущающее), так и внутреннее (контрольное) воздействия.
Учитывая зависимость отспособа действия управляющего воздействиязамкнутые САУ разделяют на:
· беспоисковые;
· поисковые.
Беспоисковая САУ – САУ, в которой управляющее воздействие вырабатывается в результате сравнения истинного значения управляемой величины с заданным значением.
Такие системы применяют для управления сравнительно несложными объектами, характеристики которых достаточно хорошо изучены и для которых заранее известно в каком направлении и на сколько нужно изменить управляющее воздействие при определенном отклонении управляемой величины от заданного значения. Таковой, к примеру, является рассмотренная ранее АСУ возбуждением синхронного генератора.
Поисковая САУ – САУ, в которой управляющее воздействие формируется с помощью пробных управляющих воздействий и путем анализа результатов этих пробных воздействий.
Читайте также
К первой группе относятся: САК – система автоматического контроля, которая производит в автоматическом режиме измерения контролируемой величины и все операции, связанные с обработкой, регистрацией и передачей полученных данных. Цель контроля: сигнализация, защита,... [читать подробнее].
Ко второй группе относятся: СОУ – система оптимального управления, в которой задача оптимального управления сводится к определению оптимального алгоритма управления при заданной и не изменяющейся структуре и параметров системы. Цель управления: определение... [читать подробнее].
По ошибке в установившемся режиме: Статическая система, которая, в установившемся режиме работы по отношению к заданному воздействию, имеет отклонение регулируемой величины от заданной в зависимости, от величины этого приложенного воздействия. Астатическая система,... [читать подробнее].
По закону регулирования: П-закон регулирования (пропорциональный), когда действие на ОР пропорционально сигналу управления. И-закон регулирования (интегральный), когда воздействие на ОР пропорционально интегралу (обычно по времени) от сигнала управления. ПД-закон... [читать подробнее].
Основным классификационным признаком САУ является используемый для ее построения принцип управления (см. раздел 2.1). При этом существует еще ряд признаков, которые используются для классификации систем управления. 2.2.1. По характеру изменения задающего воздействия... [читать подробнее].
3.1. По усилению мощности сигнала. а) САУ прямого действия- это такая САУ, в которой управляющий сигнал предварительно не усиливается. б) САУ непрямого действия - это САУ, в которых управляющий сигнал усиливается предварительно дополнительным усилительным устройством. ... [читать подробнее].
Классификационные признаки САУ выделяют три крупные группы: 1. Классификация по характеру динамических процессов в системе. 2. Классификация по характеристикам управления. 3. Классификация по другим признакам. Классификация по характеру динамических процессов в... [читать подробнее].
referatwork.ru






Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






