
1.2. Классификация
САУ
1.2.1. Классификация САУ по принципам
управления
Принципы управления являются одним из признаков классификации САУ и определяются
объемом информации, используемым управляющим устройством для выработки управляющих
воздействий. Различают принципы управления по разомкнутому циклу, по замкнутому
циклу и комбинированный принцип управления.
При управлении по разомкнутому циклу для формирования
управляющих воздействий необходима только информация о задающем и иногда о некоторых
возмущающих воздействиях. Блок-схема такой системы показана на рис.3,
ее особенностью является отсутствие контроля за поведением объекта управления.
Рис. 3. Управление по разомкнутому циклу
3. Управление по разомкнутому циклу
Рассмотрим пример
простейшей системы, работающей на этом принципе. На рис. 4.
изображена схема управляемого генератора постоянного напряжения, работающего
следующим образом. С помощью потенциометра П снимается напряжениеx, питающее
обмотку возбуждения ОВ генератора постоянного напряжения Г, ротор которого вращается
с постоянной скоростью w .
Взаимодействие магнитного потока, создаваемого обмоткой возбуждения и обмоткой
ротора, приводит к появлению ЭДС e на щетках генератора. Полагая нагрузку
выходной цепи генератора активным сопротивлениемRн, получим
на нем напряжениеy, контролируемое вольтметромV. При всех постоянных
факторах, таких, как сопротивление нагрузкиRн, скорость вращения
ротора w и др., напряжение y будет зависеть от величины x. Управление
Управление
выходной величиной y будет осуществляться с помощью задающего воздействия
x.
Рис. 4. Схема генератора напряжения
без обратной связи
Предположим,
что мы установили требуемое значение напряжения y, однако после этого
величина нагрузки Rн, скачкообразно изменилась (рис.
5.).
Рис. 5. Характер изменения переменных у генератора
без обратной связи
Это приведет
к тому, что при прежней величине x выходное напряжение y изменится,
так как оно зависит от сопротивления нагрузки:
где
Rr — сопротивление
выходной цепи генератора.
Падение этого напряжения никак не отразится на характере
управления. Таким образом, при прежнем значении задающего воздействия x
выходная координата y изменится за счет изменения внешнего воздействия
(нагрузки). Этот пример показывает, что в системах, работающих по разомкнутому
циклу, нежелательные отклонения выходного процесса управляющим устройством не
учитываются и не компенсируются. Для улучшения качества системы можно было бы
измерять величину сопротивления нагрузки и в соответствии с этим изменять величину
x. Очевидно, что техническая реализация подобного способа сложна, тем
более, что ряд возмущающих воздействий измерить невозможно или измерения могут
проводиться с большими погрешностями. Рассмотренный пример позволяет утверждать,
что качество систем, работающих по разомкнутому циклу, как правило, невысокое,
а возможности измерения возмущающих воздействий для компенсации их вредного
влияния ограничены. По этим причинам принцип управления по разомкнутому циклу
По этим причинам принцип управления по разомкнутому циклу
нашел ограниченное применение на практике.
При управлении по замкнутому циклу управляющее устройство
использует информацию как о задающем воздействии x, так и о значениях
выходных координат объекта y. Эта информация поступает через устройство
обратной связи (УОС). Блок-схема системы изображена на рис.6.
Влияние возмущающих воздействий в таких системах оценивается путем контроля
за текущими значениями выходных координат. В управляющем устройстве эта информация
сравнивается с желаемым законом изменения y(t) и в соответствии с этим
вырабатываются управляющие воздействия, корректирующие ход изменения выходных
координат объекта.
Рис. 6. Управление по замкнутому циклу
Рассмотрим
простейший пример системы такого рода. На рис. 7. изображена
На рис. 7. изображена
схема генератора постоянного напряжения с обратной связью. В ее основе лежит
схема, ранее изображенная на рис. 4. Особенности работы состоят
в следующем. Выходное напряжение y подается на обмотку соленоида С, и
в зависимости от значения этого напряжения сердечник соленоида, прикрепленный
с одной стороны к пружине Пр, будет либо больше, либо меньше втягиваться
внутрь соленоида. К тяге, стоящей между сердечником и пружиной, может крепиться
движок задающего потенциометра. После установки желаемого напряжения y движок
потенциометра закрепляется на тяге сердечника. Если по каким-либо причинам произошло
уменьшение напряжения y (например, при уменьшении Rн), то сердечник соленоида выдвинется из соленоида и сместит
движок потенциометра вверх. Напряжение возбуждения увеличится и тем самым возрастет
напряжение y (рис. 8.) Параметры соленоида можно подобрать
так, чтобы уменьшение напряжения y за счет изменения сопротивления нагрузки
Rн скомпенсировалось увеличением напряжения возбуждения. Таким
Таким
же образом будет работать система и при непреднамеренном увеличении y,
только при этом напряжение возбуждения x уменьшится. Важно подчеркнуть,
что причины, которые нарушили нормальную работу этой системы, не играют роли,
так как управление происходит путем измерения конечного эффекта управления –
выходного напряжения y. Как и в предыдущем примере, рассматриваемая система
работает без участия человека, то есть автоматически. Однако за счет включения
устройства обратной связи через соленоид качество работы можно значитель-но
повысить, что видно из сравнения рис. 5. и рис.
8.
Рис.7. Схема генератора напряжения с обратной связью
Обобщая выводы
из последнего примера, можно сказать, что в системах, работающих по замкнутому
циклу, происходит автоматическая компенсация влияния возмущающих воздействий
без их непосредственного измерения. Она осуществляется за счет измерения выходных
Она осуществляется за счет измерения выходных
координат объекта управления и сравнения их с желаемыми значениями. Управляющие
воздействия вырабатываются на основе этого сравнения.
Системы с замкнутым циклом управления обладают более
высоким качеством и поэтому нашли широкое практическое применение. Благодаря
наличию устройства обратной связи они называются системами с обратной связью,
или замкнутыми системами.
В случае использования комбинированного принципа, управляющее
устройство содержит два канала: один из них работает на принципе разомкнутого
цикла, а другой – на принципе замкнутого. Блок-схема подобной системы показана
на рис. 9. Системы такого рода соединяют в себе свойства предыдущих
систем.
Классификация по принципам управления отражает фундаментальные
идеи, положенные в основу построения САУ, и определяет общую структуру системы.
1.
 2.2. Классификация САУ по виду их
2.2. Классификация САУ по виду их
математических моделей
Теория автоматического управления имеет дело с математическими моделями,
отражающими свойства реальных систем посредством математических соотношений.
Всякая математическая модель способна описать систему лишь приближенно с учетом
различного рода допущений. На практике стремятся выбрать модель по возможности
наиболее простую, что сокращает усилия на ее исследования. Противоречие между
простотой модели и степенью ее приближения к оригиналу является обычной
трудностью любой теории, в том числе и ТАУ. Непременным требованием при выборе
модели считается соответствие изучаемых в ней процессов тем, которые протекают в
реальной системе. Если такого соответствия нет, то исследования теряют всякий
смысл. Наиболее достоверным признаком пригодности выбранной модели будет
сравнение полученных с ее помощью теоретических результатов с результатами
экспериментальной проверки реальной системы. В некоторых случаях допустимо
В некоторых случаях допустимо
сравнение с данными, полученными путем исследования более точных моделей. Таким
образом, само понятие модели является условным, зависящим от характера задач и
условий их решения. Естественно, что классификация САУ по виду их математических
моделей в некотором смысле также будет условной. В самом общем виде
математической моделью САУ является оператор преобразования воздействий.
Оператором системы называется преобразование, где каждой функции, определяющей
закон изменения воздействия, ставят в соответствие другую функцию, определяющую
закон изменения выходных координат. Формально это преобразование, например для
задающего воздействия, обозначается как
y(t)=x(t)s(t) ,
где s(t) – оператор системы по задающему воздействию. Аналогично определяются
и операторы по другим воздействиям. В настоящее время отсутствуют общие методы
нахождения операторов желаемой степени сложности и точности для всех классов
систем. В этой части большую роль играют опыт и способности исследователя.
В этой части большую роль играют опыт и способности исследователя.
Однако по ряду частных задач приемы составления математических моделей
достаточно хорошо отработаны и экспериментально подтверждена удовлетворительная
точность получаемых при этом результатов. Так как теория автоматического
управления имеет дело с математическими моделями, то в дальнейшем, упоминая о
системах, будем подразумевать, что речь идет об их математических моделях,
адекватность которых реальным системам считается доказанной.
В первую очередь системы
подразделяются на линейные и нелинейные. Линейной называется такая система, для
которой справедлив принцип суперпозиции. Этот принцип для оператора системы
записывается следующим образом:
Все остальные системы относятся к
нелинейным. Подобное подразделение имеет практическое значение. Теория линейных
Теория линейных
систем существенно проще и разработана значительно подробнее, чем теория
нелинейных, поэтому при ее составлении модели системы стремятся выбрать ее в
классе линейных, что значительно упрощает методику исследования. Конечно, и
здесь должно выполняться условие адекватности модели реальным исследуемым
явлениям с необходимой степенью точности.
Информация о процессах, протекающих в
устройствах системы, передается посредством сигналов различной физической
природы: электрических, механических и других. При этом сама информация может
быть закодирована в сигналах различным способом. Если все сигналы в системе
можно рассматривать как непрерывные, то и сами системы называются непрерывными.
Однако в ряде случаев информацию целесообразно передавать с помощью дискретных
сигналов, например в виде импульсов напряжения или в цифровом коде, и тогда
системы называются дискретными. Часто в одной и той же системе бывают как
Часто в одной и той же системе бывают как
непрерывные, так и дискретные сигналы. Тогда системы называются
дискретно-непрерывными или гиб-ридными.
Если свойства системы с течением времени изменяются
и оператор системы s(t) зависит от времени, то системы называются нестационарными,
а при неизменных свойствах оператора – стационарными. Основные классы автоматических
систем с точки зрения их математических моделей показаны на рис.
10.
Для систем с сосредоточенными
параметрами, которые рассматриваются в данной теме, наиболее удобной формой
представления операторов являются уравнения. При описании непрерывных систем
используются дифференциальные уравнения, а дискретных – разностные уравнения;
линейные системы описываются линейными уравнениями, нелинейные – нелинейными; у
стационарных систем уравнения имеют постоянные коэффициенты, а у нестационарных
– переменные.
В итоге исследование САУ
сводится к явному или неявному нахождению решений соответствующих уравнений. С
С
помощью дифференциальных и разностных уравнений удается отразить такие
характерные особенности систем, как инерционность и временной характер
процессов, протекающих в них. Инерционность выражается в том, что система не
может мгновенно реагировать на внезапно приложенное к ней воздействие, а его
отработка происходит с некоторым запаздыванием и по форме будет отличаться от
исходного воздействия. Инерционные системы называются динамическими, а сама ТАУ
является разделом теории динамических систем.
Методы решения уравнений различных классов
разработаны неодинаково. Наиболее подробно изучены методы решения линейных
уравнений, особенно с постоянными коэффициентами, и значительно меньше
разработаны методы решения нелинейных уравнений. Все это однозначно определяет и
степень развития различных разделов ТАУ. Так, если теория линейных стационарных
систем разработана достаточно полно, то теория нелинейных систем, особенно
нестационарных, разработана лишь в отдельных аспектах. Все эти соображения
Все эти соображения
существенно сказываются на методологии изложения ТАУ.
На
практике использование линейных систем часто дает определенные преимущества в
качестве управления. Поэтому имеющиеся реальные систе-мы во многих случаях
работают в линейном режиме. Все это делает теорию линейных систем
фундаментальной частью всей теории автоматического управления.
Таким образом, классификация САУ по виду
их математических мо-делей играет особую роль, так как она определяет структуру
изложения теории автоматического управления и тем самым влияет на качество
усвое-ния учебного материала.
1.2.3. Классификация САУ по целевому
назначению и другим
признакам
В зависимости от числа регулируемых величин системы автоматического управления подразделяют на одномерные (одна регулируемая величина), двумерные (две регулируемые величины) и многомерные (прип
регулируемых величинах).
Многомерные системы могут быть системами несвязанного и связанногорегулирования. В системе несвязанного регулирования
регуляторы, управляющие различными переменными, не связаны одни с другими и
работают независимо. В системе связанного регулирования регуляторы связаны между
собой, и для нормальной работы требуется их вполне определенное взаимодействие.
Систему связанного регулирования называют автономной, если существуют такие
связи между регуляторами, когда изменение одной из регулируемых величин не
вызывает изменения остальных.
Понятие цели управления является исходным в
ТАУ, поэтому классификация по этому признаку играет важную роль. При
обоснованиях цели управления будем сопоставлять задающее воздействиеx(t) с тем желаемым выходным
процессомy(t), который мы
хотели бы получить при идеальной работе системы. Это удается сделать, если
Это удается сделать, если
ввести понятие идеального оператора системыsи(t), и тогда желаемый
выход
y(t) = sи(t)x(t).
Классификация систем по целевому назначению
сводится к выделению определенных классов операторовsи(t). Строго говоря, число классов САУ, выделяемых по
указанному признаку, может быть бесконечно большим. Рассмотрим важнейшие из них,
имеющие наибольшее значение на практике.
Следящими называются системы, целью
управления в которых является поддержание равенства
y(t) = x(t),
то есть в таких системах
идеальный оператор преобразования
sи(t) = 1.
Примеры следящих систем
многочисленны. Они используются там, где требуется безыскаженная передача
Они используются там, где требуется безыскаженная передача
какого-либо воздействия, например напряжения, угла поворота вала, цифровой
последовательности и т.д. Такая необходимость обычно вызывается двумя причинами:
либо необходимостью передачи воздействия на некоторое расстояние, либо
преобразованием этого воздействия с усилением по мощности. Для следящих систем
предполагается, что входная и выходная переменные должны иметь одну и ту же
физическую природу (напряжение, угол поворота, давление и т.д.).
Очень часто встречаются
задачи, когда наряду с отслеживанием входного воздействия требуется его
преобразование к иной форме представления, например слежение за углом поворота
вала с выдачей данных в виде напряжения. В таких системах выходная переменная
становится пропорциональной воздействию, то есть принимает вид
y(t) = kx(t),
гдеk – некоторый масштабный коэффициент.
Системы такого рода называются масштабными, а их оператор
преобразования
sи(t) = k
является постоянным
коэффициентом с определенной размерностью.
Системы следующего класса называются стабилизирующими. Это такие системы, у
которых выходная координата должна поддерживаться на постоянном уровне, то
есть
y(t) = const.
Различного рода
стабилизаторы напряжения, тока, скорости вращения вала и другие подобные
системы, работающие в автоматическом режиме, являются примерами систем подобного
класса и часто встречаются на практике.
Интегрирующими называются системы, у
которых должно выполняться соотношение
.
Идеальный оператор в этом случае является интегральным. К дифференцирующим
К дифференцирующим
относятся системы, у которых выходная переменная
,
то есть соответствует
производной от воздействия. Оператор системы в этом случае является
дифференциальным.
Очевидно, что число
примеров систем, классифицируемых по описанному выше способу, можно продолжить.
В целом, надо отметить, что любая из автоматических систем должна обладать
некоторыми преобразующими свойствами, а ее оператор может быть представлен либо
в виде некоторой функции
y(t)= F[
x(t)] ,
либо в виде
функционала
.
Легко видеть, что
приведенные выше примеры укладываются в эти записи. По своей роли в технике
наибольшее значение имеют следящие системы, поэтому в дальнейшем изложении
делается упор на теорию систем именно этого класса.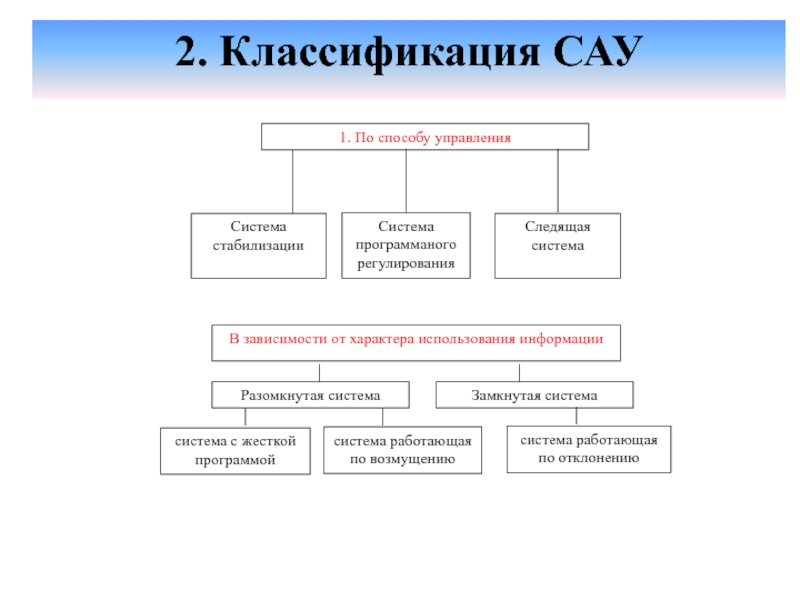 Нужно отметить, что
Нужно отметить, что
результаты теории следящих систем сравнительно просто обобщаются на системы
других классов.
Помимо описанных признаков
существует и ряд других, по которым также проводится классификация. Коротко
отметим некоторые из них.
По степени полноты информации, имеющейся к началу управления, о характеристиках воздействий и параметрах объекта управления системы подразделяются на адаптивные и сжестким законом управления. В адаптивных системах
управляющее устройство помимо выработки управляющих воздействий осуществляет
обработку поступающей на его вход текущей информации о свойствах объекта и
воздействий и на этой основе изменяет структуру и параметры системы с целью
повышения качества управления. Таким образом, в процессе работы такие системы
приспосабливаются к настоящему времени. В системах с жестким законом управления
алгоритм работы определяется заранее на весь период управления.
По качеству управления системы могут быть
оптимальными и неоптимальными. Оптимальными называются такие системы,
которые среди однотипных систем, работающих в одинаковых условиях, наилучшим
образом достигают цель управления. Иначе говоря, оптимальные – это системы с
наивысшим качеством управления. Имеются и иные, менее важные признаки классификации,
на которых мы останавливаться не будем.
Предыдущий
пункт | Наверх | Следующий пункт
| Оглавление |
Основные понятия теории автоматического управления. Классификация систем автоматического управления. — Новости и аналитика инвестиций
ОБЩИЕ ПОНЯТИЯ
Теория автоматического управления (ТАУ) появилась во второй половине 19 века сначала как теория регулирования. Широкое применение паровых машин вызвало потребность в регуляторах, то есть в специальных устройствах, поддерживающих устойчивый режим работы паровой машины. Это дало начало научным исследованиям в области управления техническими объектами. Оказалось, что результаты и выводы данной теории могут быть применимы к управлению объектами различной природы с различными принципами действия. В настоящее время сфера ее влияния расширилась на анализ динамики таких систем, как экономические, социальные и т.п. Поэтому прежнее название «Теория автоматического регулирования» заменено на более широкое – «Теория автоматического управления».
Это дало начало научным исследованиям в области управления техническими объектами. Оказалось, что результаты и выводы данной теории могут быть применимы к управлению объектами различной природы с различными принципами действия. В настоящее время сфера ее влияния расширилась на анализ динамики таких систем, как экономические, социальные и т.п. Поэтому прежнее название «Теория автоматического регулирования» заменено на более широкое – «Теория автоматического управления».
Преимущества Финам
Управление каким-либо объектом (объект управления будем обозначать ОУ) есть воздействие на него в целях достижения требуемых состояний или процессов. В качестве ОУ может служить самолет, станок, электродвигатель и т.п. Управление объектом с помощью технических средств без участия человека называется автоматическим управлением. Совокупность ОУ и средств автоматического управления называется системой автоматического управления (САУ).
Основной задачей автоматического управления является поддержание определенного закона изменения одной или нескольких физических величин, характеризующих процессы, протекающие в ОУ, без непосредственного участия человека.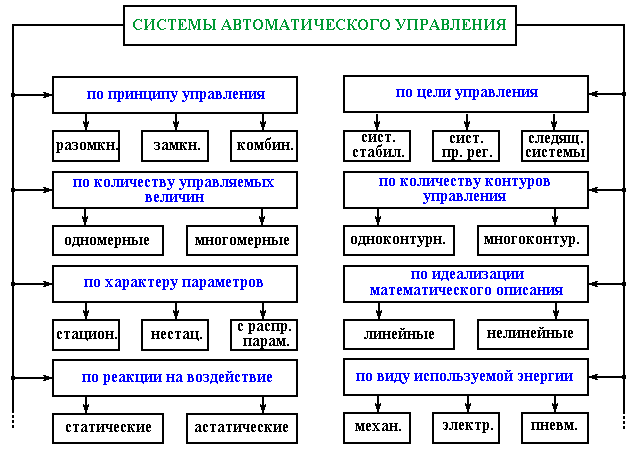 Эти величины называются управляемыми величинами. Если в качестве ОУ рассматривается хлебопекарная печь, то управляемой величиной будет температура, которая должна изменяться по заданной программе в соответствии с требованиями технологического процесса.
Эти величины называются управляемыми величинами. Если в качестве ОУ рассматривается хлебопекарная печь, то управляемой величиной будет температура, которая должна изменяться по заданной программе в соответствии с требованиями технологического процесса.
Самосохранение объектов живой природы является одним из основных свойств, лежащих в основе жизненных явлений. «Сохраняются только такие составляющие живой природы, в которых стремление к самосохранению выражено достаточно ярко», – писал А. А. Ляпунов.
Понятие самосохранения имеет в применении к биологическим системам два аспекта. Прежде всего самосохранение биологическим системам означает ее способность поддерживать в изменяющихся условиях функционирования и окружающей среды стационарное неравновесное состояние, т. е. обеспечивать энтропийный баланс в системе и баланс вещества и энергии. Другой, не менее важный аспект сохранительных свойств биосистем связан с поддержанием гомеостаза – постоянства существенных для жизнедеятельности системы переменных при наличии возмущений во внешней среде.
Живые системы – это необычайно сложные формы, возникшие в результате долгого эволюционного процесса, с сильно выраженными способностями к адаптации, приспособлению и эволюции, обладающие иерархической структурой и представляющие собой интеграцию многих гетерогенных элементов и подсистем. Здесь мы будем касаться далеко не всех вопросов, связанных со сложностью, иерархией, гомеостазом и адаптацией живых систем, ограничиваясь в основном лишь теми их сторонами, где современные методы теории управления позволяют понять или уточнить механизмы функционирования биосистем, выяснить, как образуются определенные свойства в биологических структурах, дать количественные методы и критерии их оценки.
Здесь следует заметить, что конкретные методы классической теории управления, связанные, например, с анализом передаточных функций, не всегда дают адекватное описание сложных биологических и биотехнических систем. Будучи приспособленными для решения относительно простых задач регулирования со сравнительно небольшим числом управляемых переменных, эти методы подчас малоприменимы для исследования биологических проблем, где даже при грубом упрощении приходится иметь дело с десятками и сотнями переменных и параметров. Таковы, например, задачи анализа биохимических или экологических систем, где рассматривается взаимодействие сотен компонент – различных веществ, участвующих в биохимических реакциях, или видов растений и животных, образующих экологические системы. Несколько проще дело обстоит с анализом систем физиологического уровня, где для описания функционирования таких систем, как терморегуляция, регуляция кислородного режима, требуется обычно не более двух-трех десятков переменных.
Таковы, например, задачи анализа биохимических или экологических систем, где рассматривается взаимодействие сотен компонент – различных веществ, участвующих в биохимических реакциях, или видов растений и животных, образующих экологические системы. Несколько проще дело обстоит с анализом систем физиологического уровня, где для описания функционирования таких систем, как терморегуляция, регуляция кислородного режима, требуется обычно не более двух-трех десятков переменных.
Поэтому, хотя процессы управления в живых системах в своей основе имеют много общего с управлением в технических системах, сами конкретные методы классической теории управления должны применяться для анализа биосистем с большой осторожностью. Так, использование простой следящей системы в качестве модели гомеостаза в физиологических системах не позволяет дать сколько-нибудь полной картины процессов адаптации и приспособления. Применение такой простой модели для моделирования процессов в нервной системе может дать описание только самой элементарной ее функции – функции слежения у человека-оператора, и непригодно для описания других ее свойств. Можно ожидать, что новые методы, разработанные в теории управления, в ряде случаев будут более адекватным аппаратом исследования биосистем. В частности, применение метода пространства состояний, разработанного в теории управления в последние годы, позволяет по-новому осветить вопросы гомеостаза в физиологических системах.
Можно ожидать, что новые методы, разработанные в теории управления, в ряде случаев будут более адекватным аппаратом исследования биосистем. В частности, применение метода пространства состояний, разработанного в теории управления в последние годы, позволяет по-новому осветить вопросы гомеостаза в физиологических системах.
Основными элементами системы автоматического регулирования являются объект и регулирующее устройство (регулятор).
Рисунок 1.1 Примеры структурных схем: а) – один элемент системы, б) – несколько элементов системы Рисунок 1.2 Примеры изображения объектов с входными и выходными сигналами: а) – односвязный – характеризуется наличием векторов, имеющих по одной координате; б) – многосвязный – характеризуется несколькими взаимосвязанными координатами
Любой элемент системы характеризуется входной координатой (сигналом) x(t) и выходной координатой y(t), которая зависит от входного сигнала. В свою очередь входная координата может носить возмущающий и управляющий (регулирующий) характер.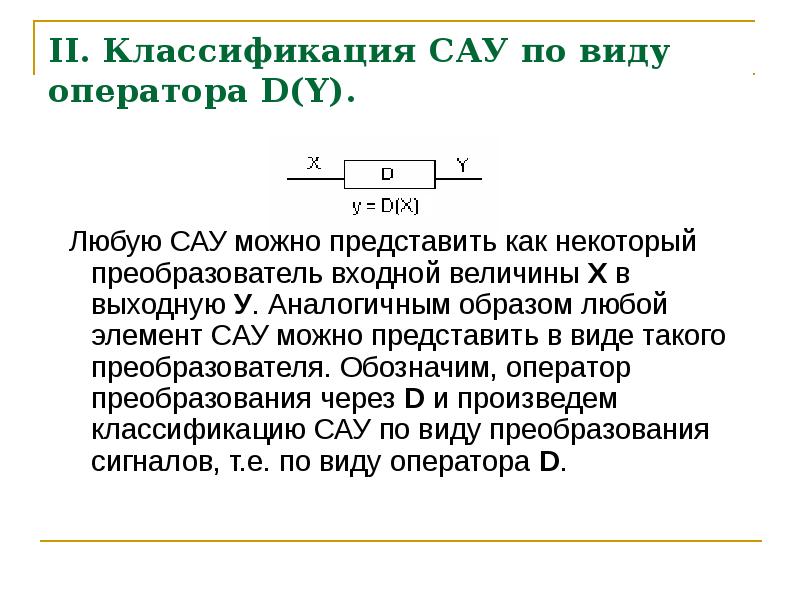 Возмущающее воздействие (возмущение) xB(t) вызывает отклонение управляемой (регулируемой) координаты от заданного значения. Управляющее u(t) (регулирующее xp(t)) воздействие служит для поддержания управляемой (регулируемой) координаты у(t) в соответствии с некоторым законом управления (поддержания регулируемой координаты на заданном уровне) (рис. 1.2).
Возмущающее воздействие (возмущение) xB(t) вызывает отклонение управляемой (регулируемой) координаты от заданного значения. Управляющее u(t) (регулирующее xp(t)) воздействие служит для поддержания управляемой (регулируемой) координаты у(t) в соответствии с некоторым законом управления (поддержания регулируемой координаты на заданном уровне) (рис. 1.2).
Целью рассмотрения системы автоматического управления может быть решение одной из двух задач – задачи анализа системы или задачи синтеза. В первом случае дается система, включая значение параметров, и требуется определить ее свойства.
Во втором случае, наоборот, задаются свойства, которыми должна обладать система, т.е. требования к ней, и необходимо создать систему, удовлетворяющую этим требованиям. Очевидно, что задача синтеза много сложнее задачи анализа уже из-за ее неоднозначности.
Как показано на рис. 2(а) в самом общем случае на вход управляющего устройства, помимо задающего воздействия ХЗ поступает также информация о текущем состоянии объекта в виде выходной величины X и о действующем на объект возмущении F. Управляющее устройство перерабатывает получаемую информацию по определенному заложенному в нем алгоритму (закону).
Управляющее устройство перерабатывает получаемую информацию по определенному заложенному в нем алгоритму (закону).
В результате на его выходе возникает управляющее воздействие.
Рисунок 2. Блок-схема (а ) и функциональная схема (б ) системы автоматического управления.
На рис. 2 (б) изображена функциональная схема САУ, на которой показаны основные составные части управляющего устройства: чувствительное устройство (ЧУ), вычислительное устройство (ВУ) и исполнительное устройство (ИУ).
Чувствительные устройства (измерительные устройства, датчики) служат для измерения подаваемых на управляющее устройство воздействий (сигналов) X, Х3 и F.
Вычислительное устройство реализует алгоритм работы управляющего устройства. В простейшем случае оно осуществляет простые математические операции, такие, как операция сравнения, определяющая разность Х3 – X, операции интегрирования, дифференцирования, статического нелинейного преобразования и т. п. В более сложных случаях вычислительное устройство может представлять собой цифровую вычислительную машину (ЦВМ) и даже комплекс таких машин.
п. В более сложных случаях вычислительное устройство может представлять собой цифровую вычислительную машину (ЦВМ) и даже комплекс таких машин.
Исполнительные устройства предназначены для непосредственного управления объектом, т. е. изменения его состояния в соответствии с сигналом, выдаваемым вычислительным устройством.
Помимо перечисленных выше частей, в состав управляющего устройства могут входить различные специальные устройства, например преобразователи, служащие для согласования отдельных частей системы, устройства связи и т. п.
При рассмотрении процессов в САУ важное значение имеют следующие понятия: устойчивость системы, качество процесса управления и точность управления.
Устойчивость – это свойство системы возвращаться в установившееся состояние после того, как она была выведена из этого состояния каким-либо возмущением. Замкнутые САУ, как всякие замкнутые системы, весьма склонны к потере устойчивости, что чаще всего проявляется в возникновении расходящихся колебаний (генерации). Например, такая неустойчивость системы регулирования напряжения генератора, изображенной на рис. В-2, в, выразится в возникновении колебаний напряжения генератора со все возрастающей амплитудой. Переходные процессы, показанные на рис. В-3, соответствуют устойчивой системе, поскольку отклонения напряжения со временем не возрастают, а уменьшаются, затухают. Если отбросить особые случаи, можно сказать, что устойчивость является необходимым условием работоспособности всякой САУ.
Например, такая неустойчивость системы регулирования напряжения генератора, изображенной на рис. В-2, в, выразится в возникновении колебаний напряжения генератора со все возрастающей амплитудой. Переходные процессы, показанные на рис. В-3, соответствуют устойчивой системе, поскольку отклонения напряжения со временем не возрастают, а уменьшаются, затухают. Если отбросить особые случаи, можно сказать, что устойчивость является необходимым условием работоспособности всякой САУ.
Качество процeсса управления характеризуется тем, насколько процесс управления близок к желаемому. Количественно оно определяется критериями качества, которые выбираются в соответствии с целью управления. Например, для упомянутой выше системы регулирования напряжения генератора качество может оцениваться такими критериями, как величина максимального отклонения напряжения генератора, вызванного скачком нагрузки, колебательность переходного процесса, его длительность.
Точность управления характеризуется погрешностью системы в установившихся режимах. Например, для системы регулирования напряжения генератора точность определяется величиной установившегося отклонения напряжения генератора от заданного значения по окончании переходного процесса.
Например, для системы регулирования напряжения генератора точность определяется величиной установившегося отклонения напряжения генератора от заданного значения по окончании переходного процесса.
КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Для ознакомления с основными видами систем автоматического управления и соответствующей терминологией рассмотрим классификацию САУ по ряду признаков, существенных с точки зрения теории автоматического управления.
А. Разомкнутые, замкнутые и комбинированные системы
схеме САУ, изображенной на рис.2 на управляющее устройство поступают три вида информации: информация о величине X, определяющей состояние объекта, информация о величине Х3, задающей цель управления, информация от F – возмущениях, нарушающих режим работы объекта. Однако возможны САУ, в которых используется лишь часть перечисленной информации. При этом в зависимости от видов используемой управляющим устройством информации различают два основных типа САУ – разомкнутые системы и замкнутые системы.
В разомкнутых САУ выходная величина объекта X не измеряется, т. е. нет контроля за состоянием объекта. Разомкнутыми такие системы называются потому, что вследствие этого в них отсутствует обратная связь между выходом объекта и входом управляющего устройства, при наличии которой объект и управляющее устройство образуют замкнутый контур.
Возможны разомкнутые САУ, в которых управляющее устройство измеряет только одно задающее воздействие Х3, одно возмущение F и, наконец, оба эти сигнала одновременно.
В первом варианте разомкнутой САУ управление осуществляется по задающему воздействию: поступающие извне команды Х3 приводят путем изменения управляющего воздействия U к соответствующему изменению выходной величины объекта X. Точность обеспечиваемого при этом соответствия между X и Х3 целиком определяется постоянством параметров системы и возмущений и никак не контролируется. Поэтому практически такие системы пригодны лишь при достаточно высокой стабильности указанных выше условий работы системы и невысоких требованиях к точности.
Примером системы этого типа служит разомкнутая система программного управления напряжением синхронного генератора, изображенная на рис. 3(а):
Рисунок 3. Системы управления напряжением синхронного генератора: а – разомкнутая система программного управления; б – разомкнутая система компенсации влияния нагрузки; в – замкнутая система управления по отклонению; г – комбинированная система управления отклонению с компенсацией влияния нагрузки.
Объектом управления здесь является синхронный генератор Г, вращаемый с постоянной скоростью двигателем Д: Выходная величина объекта – напряжение генератора – определяется напряжением возбуждения, подаваемым на обмотку возбуждения генератора ОВ от устройства задания графика напряжения УЗГ. Последнее является управляющим устройством. Напряжение возбуждения автоматически изменяется во времени в соответствии с заложенной в УЗГ программой, обеспечивая соответствующее изменение напряжения генератора.
Система управления по задающему и возмущающему воздействиям является наиболее полным видом разомкнутой САУ.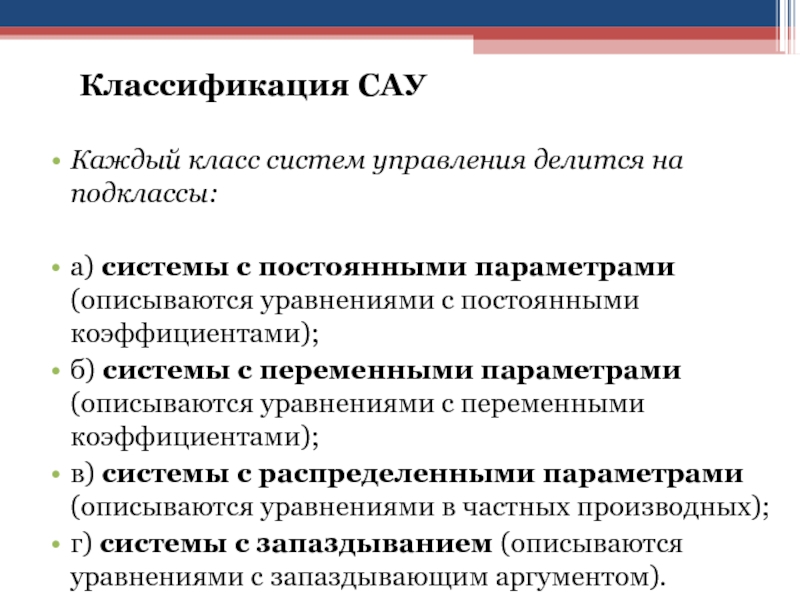 В этом случае управление объектом осуществляется в функции двух величии Х3 и F, т. е. здесь объединены оба предыдущих варианта разомкнутых систем.
В этом случае управление объектом осуществляется в функции двух величии Х3 и F, т. е. здесь объединены оба предыдущих варианта разомкнутых систем.
Примером такой системы может быть система программного управления напряжением генератора, объединяющая схемы изображенные на рис. 3 а и б. (В этом случае в схеме рис. 3(б) напряжение питания цепи возбуждения должно подаваться от устройства задания графика напряжения УЗГ, показанного на рис. 3(а). В отличии от системы программного управления, изображенной на рис. 3(а) в новой схеме устраняется основная ошибка по напряжению, вызванная непостоянством нагрузки генератора.
В замкнутых САУ на вход управляющего устройства подаются задающее воздействие Х3 и выходная величина объекта X. Исходя из величины Х3, управляющее устройство определяет соответствующее требуемое значение X и, имея информацию о текущем значении X, обеспечивает необходимое соответствие между X и Х3 путем воздействия на объект.
В такой САУ управляющее устройство стремится ликвидировать все отклонения X от его значения, определяемого заданием Х3, независимо от причин, вызвавших эти отклонения, включая любые возмущения, внешние и внутренние помехи, а также изменения параметров системы
Как видно из рис.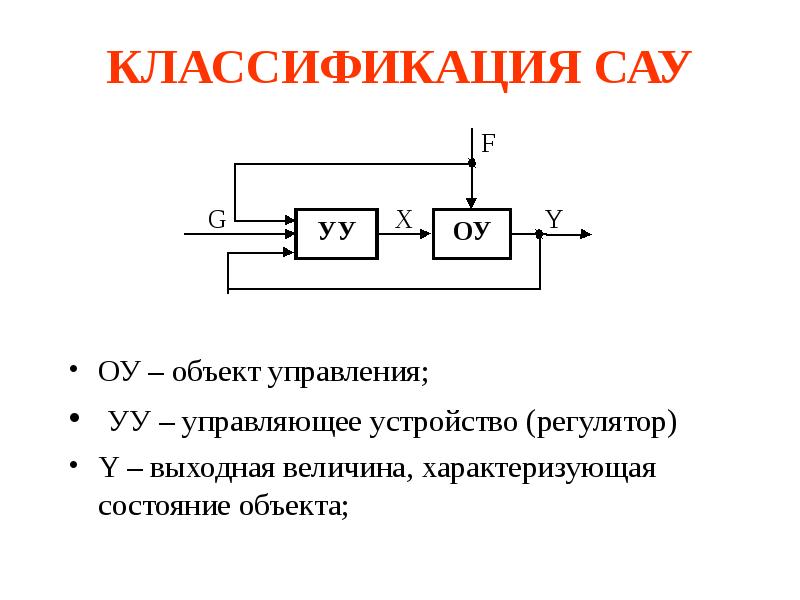 2, САУ такого типа представляют собой замкнутый контур, образованный объектом и управляющим устройством. При этом управляющее устройство создает обратную связь вокруг объекта, связывая его выход со входом. Замкнутые САУ называются поэтому еще системами с обратной связью или системами управления по отклонению .
2, САУ такого типа представляют собой замкнутый контур, образованный объектом и управляющим устройством. При этом управляющее устройство создает обратную связь вокруг объекта, связывая его выход со входом. Замкнутые САУ называются поэтому еще системами с обратной связью или системами управления по отклонению .
Эти системы могут обеспечить принципиально неограниченную точность управления и представляют собой основной тип САУ.
Комбинированные САУ представляют собой объединение в одну систему замкнутой системы управления по отклонению и разомкнутой системы управления по внешнему воздействию. Показанная на рис. 2 схема является схемой такой комбинированной САУ.
Добавление к замкнутой системе управления разомкнутой системы компенсации влияния на выходную величину объекта какого-либо возмущения облегчает задачу замкнутой САУ и тем самым позволяет упростить ее и повысить точность управления. Лучшее качество управления в комбинированных системах объясняется тем, что в них наиболее полно используется информация об объекте и внешней ситуации.
Б. Системы автоматического регулирования – системы стабилизации, системы программного управления и следящие системы
Частным, но широко распространенным видом систем автоматического управления являются системы автоматического регулирования (САР). Системой автоматического регулирования называется САУ, задача которой заключается в поддержании выходной величины объекта X на заданном уровне ХЗ, т. е. поддержание равенства X = Х3.
В зависимости от характера задающего воздействия САР делятся на три вида: системы стабилизации, системы программного управления и следящие системы.
В системах стабилизации задающее воздействие постоянно, в системах программного управления оно изменяется по заранее заданному закону, в следящих системах оно тоже изменяется, но закон изменения заранее не известен. В последнем случае задающее воздействие поступает на систему извне и задачей системы является обеспечение слежения выходной величиной объекта за изменяющейся задающей величиной так, чтобы все время поддерживалось равенство X = Х3.
Управляющее устройство в системах автоматического регулирования называется регулятором , а выходная величина – регулируемой величиной.
Примерами систем автоматического регулирования служат системы, показанные на рис. 3, (б, в, г). Объектом регулирования здесь является синхронный генератор, регулируемой величиной – его напряжение, а обведенные пунктиром управляющие устройства – регуляторами.
В. Одномерные и многомерные системы
В зависимости от количества выходных координат объекта управления, образующих вектор выходной величины X, САУ делятся на одномерные и многомерные (двухмерные и т. д.).
Рассмотренные выше системы автоматического регулирования напряжения синхронного генератора (см. рис. 3) являются одномерными системами. Если наряду с напряжением регулировать частоту этого генератора путем воздействия на скорость вращающего его двигателя, получится двухмерная система автоматического регулирования.
Многомерные САУ (и САР), в свою очередь, делятся на системы связанного и несвязанного управления (регулирования).
Система несвязанного управления — имеет несколько управляющих устройств, каждое из которых осуществляет управление своей выходной координатой объекта. При этом все эти устройства не имеют взаимных связей. (Последнее, однако, не исключает возможности влияния управляющих устройств друг на друга через объект управления или, например, общий источник питания.)
В системе связанного управления отдельные управляющие устройства связаны друг с другом внешними связями.
Входящая в состав многомерной системы управления (как связанной, так и несвязанной) отдельная система управления называется автономной , если управляемая ею выходная координата объекта не зависит от’ значений остальных его координат, так что изменение последних не вызывает изменения этой координаты.
Г. Системы линейные и нелинейные
Линейной называется система, которая описывается линейными уравнениями. В противном случае система является нелинейной . Чтобы система была нелинейной, достаточно иметь в ее составе хотя бы одно нелинейное звено, т. е. звено, описываемое нелинейным уравнением.
е. звено, описываемое нелинейным уравнением.
Для линейных систем справедлив принцип суперпозиции. Он заключается в том, что реакция системы на любую комбинацию внешних воздействий равна сумме реакций на каждое из этих воздействий, поданных на систему порознь. Принцип суперпозиции позволяет выразить реакцию системы на любое произвольное воздействие через реакцию системы на элементарное типовое воздействие, например, в виде ступеньки. Для этого достаточно представить данное входное воздействие в виде совокупности выбранпых типовых воздействий. Благодаря принципу суперпозиции разработана общая теория линейных систем автоматического управления, описываемых линейными дифференциальными уравнениями любого порядка.
К нелинейным системам принцип суперпозиции не применим. Нет и общей теории нелинейных дифференциальных уравнений, на основе которой могла бы быть создана общая теория нелинейных систем автоматического управления. Существует лишь ряд частных методов для решения некоторых видов нелинейных уравнений невысокого порядка.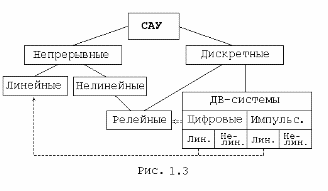 Вместе с тем, если не ограничивать диапазона изменения входных воздействий, то все реальные системы автоматического управления оказываются нелинейными. Трудность исследования нелинейных систем заставляет упрощать их описание. Желательным пределом такого упрощения является приближенное описание их линейными -уравнениями, хотя бы в некоторых из интересующих нас режимов. Это называется линеаризацией нелинейных систем. В тех случаях, когда линеаризация невозможна, прибегают к приближенным методам исследования нелинейных систем с учетом их нелинейностей.
Вместе с тем, если не ограничивать диапазона изменения входных воздействий, то все реальные системы автоматического управления оказываются нелинейными. Трудность исследования нелинейных систем заставляет упрощать их описание. Желательным пределом такого упрощения является приближенное описание их линейными -уравнениями, хотя бы в некоторых из интересующих нас режимов. Это называется линеаризацией нелинейных систем. В тех случаях, когда линеаризация невозможна, прибегают к приближенным методам исследования нелинейных систем с учетом их нелинейностей.
Д. Системы стационарные и нестационарные
Стационарной называется система, все параметры которой не изменяются во времени. Нестационарная система – это система с переменными параметрами. При математическом описании нестационарной системы это проявляется в том, что некоторые коэффициенты дифференциального уравнения системы являются функциями времени.
В соответствии с данным определением, в отличие от нестационарной системы, реакция стационарной системы на одно и то же воздействие не зависит от момента приложения этого воздействия.
Е. Системы непрерывного и дискретного действия
САУ бывают непрерывного или дискретного действия в зависимости от характера действия составляющих систему звеньев.
Система непрерывного действия, или, короче, непрерывная система , состоит только из звеньев непрерывного действия, т. е. звеньев, выходная величина которых изменяется плавно при плавном изменении входной величины.
Система дискретного действия, или дискретная система, – это система, содержащая хотя бы одно звено дискретного действия. Звеном дискретного действия называется звено, выходная величина которого изменяется дискретно, т. е. скачками, даже при плавном изменении входной величины. (Скачки выходной величины могут происходить либо при прохождении входной величиной определенных пороговых значений – звено релейного, действия, либо через определенный интервал времени – звено импульсного действия.)
Ж. Адаптивные и неадаптивные системы
Адаптивные, или самоприспосаливающиеся, системы обладают способностью приспосабливаться к изменению внешних условий работы, а также улучшать свою работу по мере накопления опыта. Неадаптивные, или, как их еще называют, обыкновенные, системы такой способностью не обладают. Они имеют постоянную настройку. Если вследствие какого-либо изменения условий работы обыкновенной системы ее настройку требуется изменить для того, чтобы сохранить заданное качество управления (например, точность, быстродействие), эту перенастройку должен сделать человек. В случае адаптивной системы это осуществляется автоматически самим управляющим устройством системы.
Неадаптивные, или, как их еще называют, обыкновенные, системы такой способностью не обладают. Они имеют постоянную настройку. Если вследствие какого-либо изменения условий работы обыкновенной системы ее настройку требуется изменить для того, чтобы сохранить заданное качество управления (например, точность, быстродействие), эту перенастройку должен сделать человек. В случае адаптивной системы это осуществляется автоматически самим управляющим устройством системы.
Область применения адаптивных САУ – это управление объектами, свойства или условия работы которых недостаточно известны или существенно непостоянны. В этих условиях обыкновенная, неадаптивная, система либо будет работать неудовлетворительно, либо потребует постоянного надзора.
Источник: m.vk.com
Источник
Конспект лекции на тему «Классификация систем автоматического управления»
КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
В настоящее время системы автоматического управления принято классифицировать по целям и способам управления.
Целью управления при ведении технологических процессов является высокоэффективная работа объекта управления, которая оценивается показателем эффективности.
Показатель эффективности работы объекта управления определяется из выходных параметров процесса, характеризующих конечный продукт (например, его количество, качество, себестоимость).
КЛАССИФИКАЦИЯ САУ
По цели управления САУ делятся на:
Цель управления стабилизирующей САУ — поддержание показателя эффективности на постоянном, заранее заданном значении.
Стабилизирующие САУ полностью оправдывают себя при управлении вспомогательными процессами, показатель эффективности которых следует поддерживать постоянным для наилучшего ведения основного процесса. Например, подача нагретого воздуха для теплообработки железобетонных изделий.
Что же касается основных процессов, то стабилизирующие САУ оправдывают себя только на стационарных объектах управления, где условия протекания процессов меняются редко и незначительно. К таким объектам можно отнести бетоно-смесительные узлы, пропарочные камеры и т.п.
К таким объектам можно отнести бетоно-смесительные узлы, пропарочные камеры и т.п.
Цель управления оптимизирующей САУ — поддержание показателя эффективности (ПЭ) не на постоянном, а на оптимальном значении при соблюдении определенных ограничивающих условий на ряд параметров процесса Х( (например, расхода и температуры сырья).
( ПЭ ПЭ opt)
X1min ≤ X1;
Х2min ≤ X2 ≤ Х2mах;
X3 = А;
X4 ≤ Х4mах.
Показатель эффективности оптимизирующих САУ часто называют критерием оптимальности.
Оптимизирующие САУ могут базироваться на экстремальных регуляторах или электронно-вычислительных машинах (ЭВМ). Для реализации оптимизирующей САУ на ЭВМ необходимо использовать математическую модель управляемого процесса, т.е. систему уравнений, дающих представление о взаимозависимости между его параметрами (включая уравнение связи критерия оптимальности и параметров процесса). Разработка подобной модели проводится на основе статических и динамических характеристик объекта управления, выраженных аналитически.
Разработка подобной модели проводится на основе статических и динамических характеристик объекта управления, выраженных аналитически.
На основании полученной математической модели процесса составляется алгоритм управления им. ЭВМ получает информацию о состоянии объекта, обрабатывает ее в соответствии с этим алгоритмом и формирует управляющие воздействия.
По способу управления САУ делятся на:
● замкнутые;
● разомкнутые;
● комбинированные.
В замкнутых системах управляющее воздействие формируется в зависимости от отклонения текущего значения показателя эффективности от заданного.
Главное преимущество замкнутых САУ – это возможность осуществления заданного закона изменения показателя эффективности независимо от вида, количества и места приложения возмущающих воздействий. Одним управляющим воздействием компенсируются все возмущения.
Однако, замкнутые системы не препятствуют проникновению возмущающих воздействий в объект управления, а только реагируют на их последствия; в результате чего заданный закон изменения показателя эффективности выполняется не точно. Следовательно, замкнутые САУ не могут обеспечить высокое качество управления сложных объектов, подверженных многочисленным возмущающим воздействиям. В этом и состоит их главный недостаток.
В разомкнутых системах управляющие воздействия осуществляются независимо от текущего значения показателя эффективности.
Главное отличительное свойство разомкнутых САУ – отсутствие обратной связи.
Различают 2 вида разомкнутых систем:
● жесткой программой;
● системы компенсации.
В системах с жесткой программой управляющее воздействие осуществляется по заранее заданному во времени закону. При этом возмущающие воздействия и состояние объекта управления не учитывается.
В системах компенсации управляющие воздействия формируются в зависимости от возмущающих воздействий. Здесь управляющая система состоит из двух и более управляющих устройств, каждое из которых функционирует автономно. Текущие значения входных параметров Z1 и Z2 сравниваются с заданными значениями. Если текущие значения окажутся не равными заданным, в объект вносятся управляющие воздействия U1 и U2, компенсирующие возмущения.
Главным преимуществом систем компенсации является то, что возмущающие воздействия ликвидируются до поступления их в объект управления, в результате чего показатель эффективности может и не изменяться. Но так как ликвидировать все возмущающие воздействия практически невозможно, использование только систем компенсации чаще всего не дает большого эффекта.
В комбинированных системах используется принцип формирования управляющих воздействий как замкнутых, так и разомкнутых систем. В основу комбинированной системы положена замкнутая САУ с дополнительными управляющими устройствами, которые ликвидирует наиболее сильные возмущающие воздействия.
Разновидностью комбинированных САУ являются многоконтурные системы. В многоконтурных САУ управляющее воздействие — одновременно функция отклонения текущего значения показателя эффективности от его заданного значения и функция одного или нескольких возмущающих воздействий. Такие САУ включают в себя, как минимум, два управляющих устройства: главное и вспомогательное, совместно формирующие управляющее воздействие U.
Многоконтурная САУ поддерживает показатель эффективности на заданном значении и ликвидирует возмущающие воздействия по каналу параметра Z2 до поступления их в объект управления. Для ликвидации возмущающих воздействий по каналу параметра Z1 в схеме предусмотрено специальное управляющее устройство.
2.6 Классификация САУ. Расчет систем автоматического регулирования
Похожие главы из других работ:
Агрегатный станок по нарезанию гаек с мелкими шагами
1.2 Классификация
Агрегатные станки (рис. 1) в зависимости от формы, размеров заготовок, требуемой точности обработки компонуют по разным схемам: односторонними и многосторонними, одношпиндельными и многошпиндельными, однопозиционными и многопозиционными…
1) в зависимости от формы, размеров заготовок, требуемой точности обработки компонуют по разным схемам: односторонними и многосторонними, одношпиндельными и многошпиндельными, однопозиционными и многопозиционными…
Исполнительные механизмы автоматических систем
2.2 Классификация
Электрические исполнительные механизмы делятся на электромагнитные и электродвигательные. К электромагнитным исполнительным относятся реле, контакторы, электромагниты, электромагнитные вентили и клапаны, электромагнитные муфты…
Исследование работы тестоделителя «Suction Dough Divider SD-180» и определение неисправностей, нарушающих его работоспособность
2.1 Классификация
Ниже приводятся принципиальные схемы тестоделительных машин, применяемых в настоящее время в России и за рубежом. На рисунках 1 — 4 изображены схемы тестоделителей 1-го класса (без делительных головок)…
Легкие бетоны и изделия на их основе
3.
 Классификация
Классификация
Легкие бетоны классифицируют в зависимости от структуры, вида вяжущего и пористости заполнителей, области применения…
Методы стандартизации
1.2 Классификация
Основной разновидностью систематизации является классификация…
Механические гироскопы
1. КЛАССИФИКАЦИЯ
…
Неметаллические материалы
1.1 Классификация
Ткань — текстильное изделие, измеряемое соответствующей мерой (длина, ширина, площадь), образованное на ткацком станке переплетением взаимно перпендикулярных систем нитей.
Ткани различают в зависимости от сырья, из которого они выработаны…
Основные характеристики пирометров
1. Классификация
Пирометры можно разделить по нескольким основным признакам:
Оптические. Позволяют визуально определять, как правило, без использования специальных устройств, температуру нагретого тела, путем сравнения его цвета с цветом эталонной нити. приспосабливающиеся САУ (САР) и приспосабливающиеся (адаптивные) САУ…
приспосабливающиеся САУ (САР) и приспосабливающиеся (адаптивные) САУ…
Современное состояние и пути развития полусухих и полусладких столовых вин
2. Классификация вин
Ассортимент виноградных вин очень обширен. Только в России вырабатывают до 200 наименований вин разных типов, марок, состава и качества.
Вина классифицируются по ряду признаков: способу производства, содержанию спирта и сахара, цвету…
Технологии и свойства важнейших видов силикатной эмали
3. Классификация
1. Грунтовые (ЭСГ), предназначены для нанесения на стальную поверхность
2. Покровные (ЭСП), предназначены для нанесения на поверхность, покрытую грунтовой эмалью
3. Бортовые (ЭСБ), предназначены для нанесения на поверхность…
Установка для переработки отходов слюдопластового производства
2.5 Классификация
Измельчение слюды осуществляется в замкнутом цикле, т.е. материал неоднократно проходит через барабанную мельницу. Измельченный материал из мельницы поступает в классификатор…
Измельченный материал из мельницы поступает в классификатор…
Устройство, принцип действия трубоукладчика
1.3 Классификация
По типу двигателя тракторы бывают электрическими и оборудованными дизелем, который используется на большинстве современных тракторов как наиболее экономичный по расходу топлива…
Классификация систем автоматического управления. Условно-графическое представление САУ. Правила преобразования структурных схем, страница 4
Рис. В.3.5. Механические характеристики ДПТ
НВ (а) и САУ управления его скоростью с регулированием по возмущению.
Пример В.2. Построение системы стабилизации частоты
вращения электродвигателя постоянного тока по принципу Ползунова—Уатта
(регулирование по отклонению).
На рисунке В.3.6. представлена
блок-схема САУ, реализованная по принципу регулирования по отклонению.
Рис. В.3.6. Блок-схема автоматизированного
электропривода, реализованного по принципу Ползунова—Уатта.
Здесь дополнительно к
рис. В.3.6. обозначено:
СУ – сравнивающее
устройство, ТГ – тахогенератор, ΔU – напряжение (сигнал)
рассогласования, Uтг – напряжение
тахогенератора (обратной связи).
В установившемся
режиме эту САУ можно описать системой уравнений
(В.5)
Методом исключения
промежуточных переменных получим из (В.5) выражение для механической
характеристики данной САУ ДПТ НВ
. (В.6)
Из полученного видно,
что в данной САУ сделать скоростную ошибку Δωм нулевой при реальных параметрах элементов не
удается, но получить ее не более допустимой можно.
Для этого
первоначально надо настроить обратную связь, исходя из теоретически возможного
условия, что при отклонение .
При этом уравнение
(В.6) дает расчетное соотношение для требуемого коэффициента передачи обратной
связи
. (В.7)
(В.7)
Теперь из условия
, где – допустимая скоростная ошибка из-за нагрузочного момента , можно получить расчетное
выражение для требуемого коэффициента передачи регулятора скорости
. (В.8)
Здесь через обозначена допустимая относительная скоростная ошибка (статизм).
Сравнение
проиллюстрированных принципов построения САУ показывает, что – лучшим на первый
взгляд , оказывается первый, когда скоростную ошибку можно сделать нулевой.
Однако реальных
возмущающих воздействий оказывается очень много ( изменение момента нагрузки,
колебания напряжения сети электропитания, разогрев обмоток и магнитопровода
электродвигателя и т.д ) и чтобы их все учесть приходится вводить большое
количество компенсирующих связей.
В тоже время
применение даже одной обратной связи по регулируемой величине позволяет не
только учесть влияние всех возмущений, но и сделать ошибку нулевой, используя
астатические САУ, как будет показано далее.
В.3.2.
Классификация САУ по числу регулируемых величин.
Если принять во
внимание, что канал – это часть САУ, в котором информация
передается в одном направлении, а контур регулирования – это
замкнутая часть САУ, образованная несколькими каналами для регулирования одной
выходной величины (координаты), то можно осуществить следующую классификацию
САУ (рис. В.3.7).
Одноконтурные
САУ имеют один контур регулирования одной величины, образованный каналами
передачи сигналов: прямым (),
обратной связи () и (или) возмущения
().
В многоконтурных САУ таких
контуров, а значит и регулируемых величин несколько, причем среди них могут
быть главные и второстепенные.
Рис. В.3.7. Фрагмент общей схемы
классификации САУ.
В многоконтурных САУ
(рис. В.3.8) контуры управления могут быть автономными, когда
каждый управляющий сигнал воздействует только на одну “свою” регулируемую
величину, и связанными, то есть влияющими друг на друга. В
последнем случае для заданного изменения одной регулируемой величины требуется
изменять несколько управляющих величин, чтобы скомпенсировать взаимосвязь
контуров, из-за которой изменение одной управляющей величины приводит к
изменению не только “своей”, но и других регулируемых величин.
В САУ подчиненного
регулирования контуры управления располагаются один внутри другого
(концентрично), причем быстродействие контуров “от центра к периферии”
уменьшается. Это позволяет взаимосвязь контуров почти исключить за счет
разделения процессов регулирования различных величин по времени.
Introduction to Automatic Control Theory (RUS. ver.)
(математическая логика, теория вероятностей, теория игр и другие) и
научные направления, которые развились уже непосредственно в рамках
самой кибернетики (теория автоматов, теория формальных грамматик,
теория распознавания образов и другие). Кроме теоретического ядра, в
Кроме теоретического ядра, в
кибернетике возникли и сформировались как самостоятельные
разнообразные прикладные направления. Так проблемы автоматизации
технологических процессов, управления сложными технологическими
комплексами сформировались в отдельное направление, которое называется
техническая кибернетика.
Техническая кибернетика — направление кибернетики, в котором
изучаются на основе общих для кибернетики в целом научных идей и
методов технические системы управления.
Техническая кибернетика является современным этапом развития
теории и практики автоматического регулирования и управления, а также
научной базой для решения задач комплексной автоматизации производства,
транспортных и других сложных систем управления. Сложные системы
управления — это обобщающее название систем, состоящий из большого
количества взаимосвязанных элементов. Часто сложными системами
Часто сложными системами
называют системы, которые невозможно описать корректно математически
или потому, что система содержит большое количество различных
элементов, связанных между собой неизвестным образом, или потому, что
неизвестна природа явлений, которые происходят в системе и поэтому их
невозможно количественно описать. Одной из составляющих технической
кибернетики является теория автоматического управления (теория
автоматического регулирования), которая сформировалась в
самостоятельную научную дисциплину примерно в 1940 году.
Теория автоматического управления — раздел технической
кибернетики, изучающей системы автоматического управления различной
природы и сложности.
Обобщающий подход к изучению процессов управления требует
определенной абстракции от природы и конструктивных особенностей
составных частей систем автоматического управления. Именно поэтому
Именно поэтому
вместо реальных объектов в теории автоматического управления
рассматриваются адекватные им математические модели.
Теория Автоматического Управления GlobalLogic Ukraine
Страница 6 из 55
1.5. Классификация интеллектуальных систем и структурная организация интеллектуальных САУ
Основная функция интеллектуальных САУ, качественно отличающая их от других САУ – это реализация определенных «разумных», человекоподобных
рассуждений и действий, направленных на достижение определенной цели в соответствующей предметной области. В большинстве случаев,
выполняя какие-то действия, человек сам точно не осознает, как он это делает. Ему неизвестен алгоритм происходящих в его мозге
процессов понимания текста, узнавания лица, доказательства теоремы, выработки плана действий, решения задачи и т.д. Таким
образом, всякая задача, для которой неизвестен алгоритм решения, относится к области применения систем искусственного интеллекта.
При решении этих задач человек действует, не имея точного метода решения проблемы. Данный тип задач обладает двумя характерными
особенностями:
- использование информации в символьной форме (слова, знаки, рисунки), что отличает системы искусственного интеллекта от традиционных
компьютерных систем, обрабатывающих только числовые данные; - наличие возможности выбора – отсутствие алгоритма решения означает только то, что необходимо делать выбор между многими вариантами
в условиях неопределенности.
По кругу решаемых задач системы искусственного интеллекта можно подразделить на следующие группы:
- системы распознавания образов;
- математические системы и системы автоматического доказательства теорем;
- игровые системы;
- системы решения технических задач, связанных с целенаправленным движением в пространстве и времени;
- системы понимания естественного языка;
Данная классификация была введена на заре становления систем искусственного интеллекта и быстро себя исчерпала, поскольку
дальнейшее развитие интеллектуальных систем привело к своеобразному «сращиванию» отдельных задач в одно целое в рамках решаемой
системой глобальной технической задачи.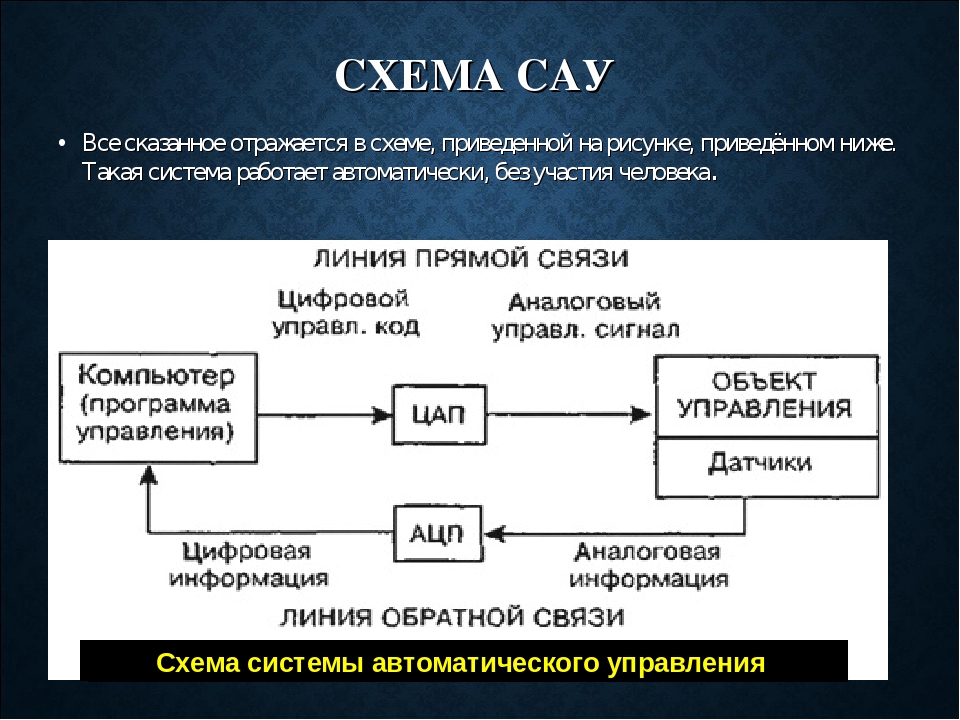 К примеру, мобильные робототехнические системы должны решать и задачи распознавания
К примеру, мобильные робототехнические системы должны решать и задачи распознавания
образов, и технические задачи по позиционированию, обходу препятствий и т.д. Экспертные системы должны обладать возможностью
понимания естественного языка, обладать способностями математических систем, реализовывать прогностические возможности игровых
систем. Таким образом, с развитием интеллектуальных систем росла их сложность и многофункциональность, да это и понятно –
в идеале интеллектуальная система должна воспроизводить мыслительную деятельность человека, а человек, как известно, самое
многофункциональное интеллектуальное устройство.
Возник закономерный вопрос, как классифицировать, структурно упорядочить и организовать все многообразие интеллектуальных
систем, которые были созданы и продолжали конструироваться со все возрастающими темпами (что связано с бурным развитием микроэлектроники
в течение последнего десятилетия)? Ни по кругу решаемых задач, ни по конструктивно-техническим признакам, ни по принципам
построения (а собственно о каких принципах и методах может идти речь, если сама методология разработки интеллектуальных систем
по сию пору находится на этапе становления) классифицировать принципиально новый класс технических систем – интеллектуальные
системы, не представлялось возможным.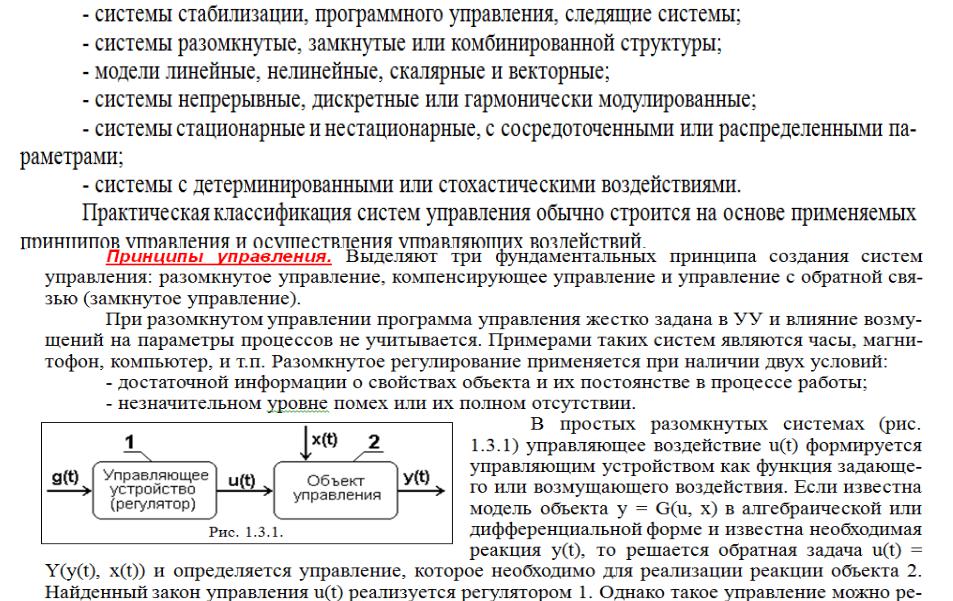
Принципиально новую структурную организацию интеллектуальных систем, опираясь на теорию искусственного интеллекта, исследования
операций и автоматического управления, разработал в 1989 г. Дж.Саридис (один из создателей нового научного направления – теории
интеллектуальных машин, представляющей общесистемный подход к решению задач проектирования интегрированных интеллектуальных
систем) [23] .
Интеллектуальная САУ структурно подразделяется на три обобщенных уровня, упорядоченных в соответствии с фундаментальным принципом
IPDI (IncreasingPrecisionwithDecreasingIntelligence) теории интеллектуальных машин: по мере продвижения к высшим уровням иерархической
структуры повышается интеллектуальность системы, но снижается ее точность, и наоборот. Под «интеллектуальностью» системы подразумевается
ее способность работать с базой событий с целью выявления неких специальных знаний, позволяющих уточнить предложенную задачу
и наметить пути ее решения.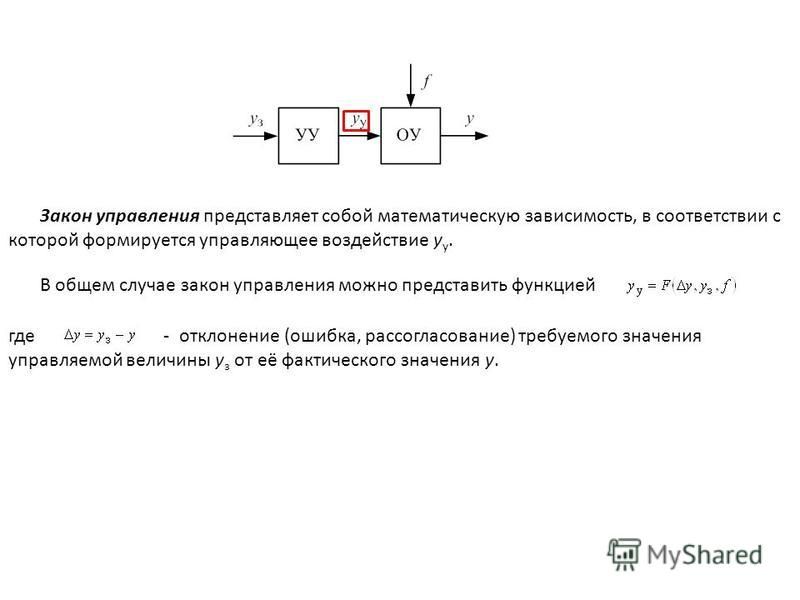 Под «неточностью» подразумевается неопределенность в выполнении операции по решению задачи. Общий
Под «неточностью» подразумевается неопределенность в выполнении операции по решению задачи. Общий
вид архитектуры интеллектуальной САУ, отвечающей этому базовому принципу, приведен на рис.1.8.
Рис.1.8. Иерархическая структура интеллектуальной САУ
Каждому из уровней (которые сами могут быть многоуровневыми) соответствует специальная подсистема, реализующая функции, отвечающие
определенным ниже пяти принципам организации интеллектуальных управляющих систем [9].
1. Наличие взаимодействия управляющих систем с реальным внешним миром с использованием информационных каналов связи. Первый принцип подчеркивает непосредственную связь интеллектуальных управляющих систем с внешним миром. Находясь в непрерывном
взаимодействии с внешним миром, интеллектуальные системы получают из него всю необходимую информацию в виде извлеченных знаний.
Более того, управляющая система может оказывать на внешний мир целенаправленное активное воздействие. Модель знаний о внешнем
мире, используемая интеллектуальной системой, должна предполагать не только уточнение описания внешней среды, которое происходит
за счет получения дополнительных знаний о внешнем мире, но и изменение состояния внешней среды вследствие реализации активного
поведения интеллектуальной системы. Таким образом интеллектуальная система может воздействовать на внешнюю среду не только
в рамках инициализируемого системой процесса получения знаний, но и исключительно с целью изменения внешнего мира в соответствии
с целью функционирования системы. Выполнение принципа взаимодействия системы с внешним миром позволяет организовать каналы
связи для извлечения необходимых знаний с целью организации целесообразного поведения.
2. Принципиальная открытость систем с целью повышения интеллектуальности и совершенствования собственного поведения. Открытость систем обеспечивается наличием таких уровней высшего ранга в иерархической структуре, как самонастройка, самоорганизация
Принципиальная открытость систем с целью повышения интеллектуальности и совершенствования собственного поведения. Открытость систем обеспечивается наличием таких уровней высшего ранга в иерархической структуре, как самонастройка, самоорганизация
и самообучение. Система знаний интеллектуальной управляющей системы состоит из двух частей: постоянных (проверенных) знаний,
которыми система обладает и постоянно пользуется, и временных (проверяемых) знаний, в которых система не уверена, с которыми
она экспериментирует в процессе обучения. В зависимости от результатов анализа своего поведения во внешнем мире система может
либо отбрасывать знания второго типа, либо переводить их в знания первого типа. В свою очередь проверенные знания могут быть
переведены в разряд проверяемых, если условия функционирования и результаты работы системы во внешнем мире становятся неадекватными
определенной области постоянных знаний. Выполнение второго принципа позволяет организовать в интеллектуальной системе процесс
Выполнение второго принципа позволяет организовать в интеллектуальной системе процесс
приобретения, пополнения и верификации знаний.
3. Наличие механизмов прогноза изменения внешнего мира и собственного поведения системы в динамически меняющемся внешнем мире.
Система, функционирующая в меняющемся внешнем мире и не обладающая возможностями прогноза изменения состояния внешнего мира
и своего собственного состояния и поведения, может попасть в критическую ситуацию, из которой не сможет найти выхода из-за
временных ограничений на работу механизмов, формирующих управляющие воздействия, определяющих рациональное тактическое и стратегическое
поведение системы. Наглядным примером могут служить автономно функционирующие интеллектуальные робототехнические системы в
экстремальных ситуациях.
4. Наличие у управляющей системы многоуровневой иерархической структуры, построенной в соответствии с правилом IPDI. Данный принцип позволяет планировать пути построения моделей сложных управляющих систем в тех случаях, когда неточность знаний
Наличие у управляющей системы многоуровневой иерархической структуры, построенной в соответствии с правилом IPDI. Данный принцип позволяет планировать пути построения моделей сложных управляющих систем в тех случаях, когда неточность знаний
о модели объекта управления или его поведении можно скомпенсировать за счет повышения интеллектуальности создаваемых систем
или соответствующих алгоритмов управления.
5. Постоянство функционирования (возможно, с некоторой потерей качества или эффективности, т.е. с определенной степенью деградации)
при разрыве связей или потере управляющих воздействий от высших уровней иерархии управляющей структуры. Данный принцип устанавливает только потерю интеллектуальности, но не прекращения функционирования системы в целом при отказах
в работе высших уровней иерархии системы. Сохранение автономного функционирования в рамках более простого (автоматного) поведения
системы, характерного для низших уровней структуры управления обеспечивает максимальную живучесть систем управления.
Приведенные пять принципов организации структуры интеллектуальной управляющей системы позволяют уточнить такое понятие, как
«интеллектуальность» управляющей системы, а также производить классификацию интеллектуальных систем по уровню их интеллектуальности.
Очевидно, что степень интеллектуальности системы будет находиться в прямой зависимости от функциональной насыщенности уровней,
т.е. от полноты реализации базовых принципов организации интеллектуальных управляющих систем в виде соответствующих функций.
Система интеллектуальная в большом – это система построенная и функционирующая в соответствии с описанными выше всеми пятью базовыми принципами IPDI.
Системы интеллектуальные в большом должны иметь многоуровневую иерархическую структуру со следующими уровнями (в порядке понижения
ранга): уровень обучения, уровень самоорганизации, уровень прогноза событий, уровень работы с базами знаний, уровень формирования
решений, уровень планирования операций, уровень адаптации, исполнительный уровень.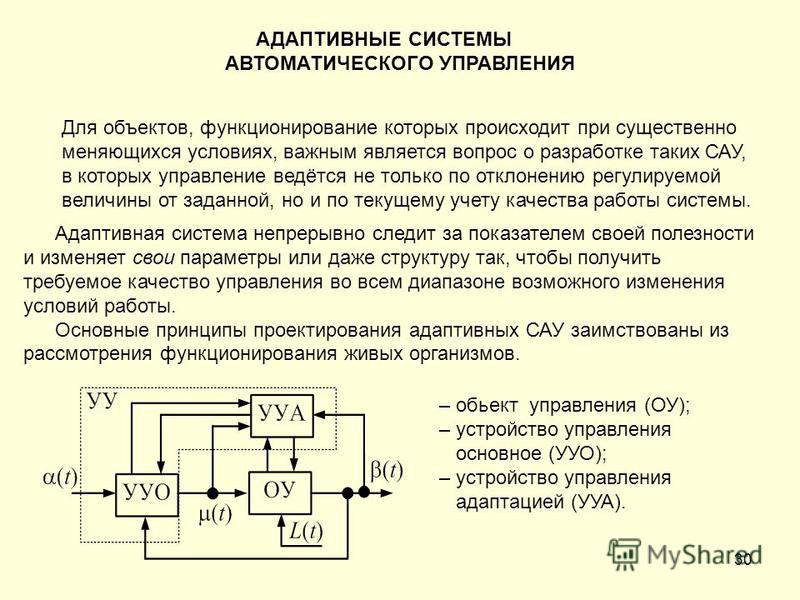 Каждый из этих уровней имеет свою функциональную
Каждый из этих уровней имеет свою функциональную
специфику и может состоять из нескольких подуровней. При этом на двух нижних уровнях иерархии используются традиционные модели
и методы теории автоматического управления. Остальные уровни более высокого ранга, или так называемая интеллектуальная надстройка,
существенно расширяют возможности этих традиционных моделей в соответствии с требованиями современной информационной технологии
работы со знаниями. Минимальная интеллектуальная надстройка может содержать только элементарную базу знаний в виде простых
продукционных правил (кстати именно такую структуру имели первые интеллектуальные регуляторы), однако уже одно это дополнение
будет вводить систему автоматического регулирования в класс интеллектуальных систем, хотя, разумеется, эта интеллектуальная
система интеллектуальной в большом не будет. Подобная интеллектуальная САУ будет «интеллектуальной в малом».
Система интеллектуальная в малом – это система структурно и функционально не организованная в соответствии с описанными выше всеми пятью базовыми принципами
IPDI, но использующая при своей работе знания как средство преодоления неопределенности входной информации, модели управляемого
объекта или его поведения.
Системы интеллектуальные в малом соответствуют общепринятому определению интеллектуальных систем, как систем, ориентированных
на обработку знаний с целью поиска решения определенной задачи. Системы интеллектуальные в малом и в большом устанавливают
нижнюю и верхнюю границы интеллектуальности управляющих систем. Степень интеллектуальности систем, находящихся внутри этого
диапазона, можно определить по наличию или отсутствию тех или иных уровней IPDI. Например, наивысшей степенью интеллектуальности
обладает управляющая система, способная к обучению, изменению структуры и прогнозу возможных ситуаций. Меньшей степенью интеллектуальности
Меньшей степенью интеллектуальности
обладает система, не способная к обучению, но способная к самоорганизации в результате анализа прогнозируемых ситуаций, и
т.д. вплоть до интеллектуальных в малом, «самых безмозглых» простейших интеллектуальных регуляторов (обычная САР плюс простая
база продукционных правил).
Система, стоящая на более высокой ступени иерархии, включает функции систем с более низким интеллектуальным уровнем, а каким
образом реализованы эти функции – это не принципиально важно. К примеру, интеллектуальная САУ с функцией адаптации, использующая
эталонную верифицируемую модель объекта управления не изменит своей принадлежности к определенному классу интеллектуальных
систем независимо от того, какой будет эта модель объекта управления – нечеткой лингвистической или нейросетевой. Или другой
пример – простейшие интеллектуальные САУ (интеллектуальные регуляторы) состоящие из обычной САР и базы продукционных правил,
в которой в первом случае согласно продукционным правилам корректируются параметры стандартного ПИД-регулятора, а во втором
случае ПИД-регулятора вообще нет, а управляющее воздействие находится исходя только из базы продукционных правил. Обе интеллектуальных
Обе интеллектуальных
САУ интеллектуальны минимально, но степень их интеллектуальности одинакова и их следует относить к одному классу систем, хотя
структура этих систем принципиально различна: в процессе работы в первом случае происходит изменение параметров системы, во
втором случае – структуры системы. Добавьте к любой из описанных выше систем блок автоматического изменения базы продукционных
правил, вырабатывающий решения автоматически на базе анализа текущего состояния системы и внешнего мира – и тогда система
приобретает качественно новые свойства и переходит в другой класс интеллектуальных систем, к системам «поумнее».
Такой подход к классификации интеллектуальных систем позволяет упорядочить многочисленные интеллектуальные системы, не ориентируясь
на такие изменчивые характеристики, как структура системы, язык представления знаний, принципы реализации функций адаптации,
круг решаемых задач и т. п.
п.
Введенная трактовка понятия интеллектуальности и признаков систем интеллектуальных в большом и в малом позволяет установить
связи с основными понятиями классической теории управления, используя разработанные в ней методы и сохраняя преемственность
при построении интеллектуальных управляющих систем (рис.1.9).
Первыми интеллектуальными САУ, объединившими в себе методы традиционной ТАУ и инженерии знаний стали так называемые активные
экспертные системы, или как их назвали позже – интеллектуальные контроллеры. Экспертная система – это система, ориентированная
на хранение, обработку и использование знаний, целью которой является принятие решений по тем или иным вопросам конкретной
предметной области, приближенным по качеству к решениям, принятым человеком-экспертом или коллективом экспертов. Первоначально
экспертные системы использовались в качестве советчика в паре с оператором, управляющим технологическим объектом. Экспертная
Экспертная
система могла предложить возможную стратегию управления объектом в определенной ситуации либо спрогнозировать поведение объекта
в ответ на предполагаемое воздействие. Традиционно экспертная система включала в себя базу знаний конкретной предметной области,
которая заполнялась при первоначальном «обучении» системы коллективом специалистов-экспертов, средства описания и заполнения
базы знаний, средства ввода-вывода для работы с оператором. По мере совершенствования экспертных систем, как на методологическом
уровне, так и на уровне технической реализации, решения экспертных систем перестали уступать решениям экспертов-людей, а скорость
принятия этих решений существенно превзошло скорость реакции человека. Возникла закономерная идея автоматизации деятельности
таких систем путем включения в их состав специальных дополнительных автоматических блоков ввода информации об объекте и блоков
формирования управляющих воздействий на основе принятых решений.
Рис.1.9. Интеллектуальная иерархия моделей САУ
Полученная таким образом интеллектуальная система управления представляет собой качественно новую систему управления сложными
объектами, поскольку базируется не только на данных, но и на знаниях (рис.1.10). Как и в традиционной САУ за ЛПР сохраняется
возможность управления объектом в ручном режиме. Сама же САУ претерпевает коренные изменения. Ядром интеллектуальной САУ является
база знаний, построенная на основе знаний экспертов – лиц, имеющих опыт по управлению сложным объектом, и содержащая правила
управления объектом, представленные в определенной форме. Так как знания и опыт человека имеют вербальный характер, то для
преобразования и представления этих знаний, а также информационного обмена с базой знаний вводятся блоки, осуществляющие ввод
знаний, вывод знаний, описание и представление знаний, а также их коррекцию. Структура базы знаний, а также структура и алгоритмы
Структура базы знаний, а также структура и алгоритмы
работы этих блоков зависят от выбранной модели представления знаний: продукционной, фреймовой, семантической, логики предикатов.
Как уже было отмечено ранее наиболее перспективными являются системы, использующие для представления знаний человека о свойствах
и принципах управления объектом лингвистические переменные и аппарат нечетких множеств в рамках продукционной базы знаний.
Построенная по данному принципу база знаний содержит множество лингвистических переменных, соответствующих лексическим категориям,
с которыми оперирует мозг человека при управлении объектом, а также таблицу нечетких отношений между лингвистическими переменными,
которая отражает приобретенный человеком опыт по управлению объектом в виде отношений между лексическими категориями. Средства
ввода и вывода знаний осуществляют так называемые процессы фаззификации и дефаззификации – прямого и обратного преобразований
количественных (числовых) и качественных (лингвистических) показателей свойств объекта и показателей качества его функционирования.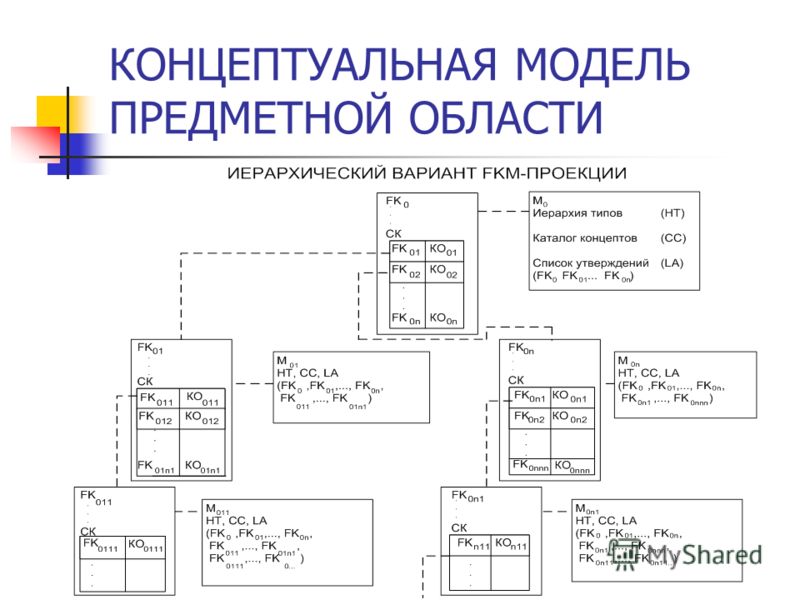
Такие системы в настоящее время наиболее широко применяются для управления сложными объектами и функционируют в роли советчика
ЛПР или в автономном режиме.
Поскольку множество ситуаций при управлении объектом постоянно в той или иной степени пополняется из-за нестабильности и непредсказуемости
свойств объекта и его внешнего окружения, то в интеллектуальной САУ должна быть предусмотрена возможность расширения базы
знаний. Основным сигналом о возникшей существенной неполноте знаний в системе служит либо участившееся неприятие советов системы
со стороны ЛПР (неадекватность управления объектом, предлагаемого системой, с точки зрения ЛПР), либо отсутствие рекомендаций
по управлению, либо неудовлетворительное функционирование САУ в автономном режиме. При этом лингвистические правила управления
объектом, содержащиеся в таблице нечетких отношений, по необходимости могут подвергаться коррекции как со стороны ЛПР, так
и со стороны группы экспертов.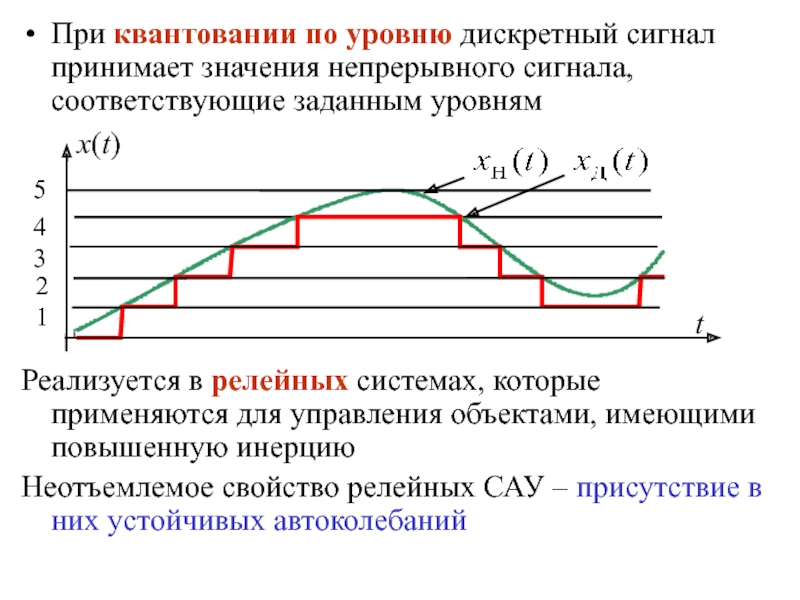 Однако, при таком подходе к обновлению базы знаний неизбежны определенные недостатки, связанные
Однако, при таком подходе к обновлению базы знаний неизбежны определенные недостатки, связанные
с методологией «интеллектуализации» САУ, т.е. с процессом передачи машине способностей человека по управлению сложными процессами
[1].
1) База знаний, являющаяся основой такой интеллектуальной САУ, является максимально близкой копией знаний коллектива экспертов,
но копией актуальной только на момент получения знаний и заполнения базы данных. Фактически со времени ввода системы в эксплуатацию
начинается процесс ее непрерывного старения. Корректор базы знаний не способен коренным образом исправить эту ситуацию, поскольку
функциональные группы естественного языка используются человеком субъективно, и знания ЛПР могут конфликтовать со знаниями
экспертов. Периодическая верификация базы знаний экспертами – это процесс долгий и непродуктивный, поскольку знания экспертов
всегда носят субъективный характер и могут меняться со временем, что также приводит к конфликту с уже установленными знаниями.
Фактически со стороны экспертов понадобится не дополнительное обучение, а полное переобучение интеллектуальной системы.
2) Знания, получаемые от экспертов, носят характер, не согласованный во времени с процессом управления, т.е. в общем случае
характер получения знаний от экспертов напоминает опрос вида: «что вы бы делали, если бы … ». В таком виде объект управления
представляется эксперту чем то абстрактным, что не требует от него немедленных оперативных действий и дает возможность без
спешки подумать, проанализировать ситуации и принять т.н. «отсроченное решение». В то же время доказано, что определенные
категории знаний человека после неоднократного успешного использования закрепляются на подсознательном уровне в виде «мгновенного
отклика»: цепочки вида «ситуация-реакция». Это дает возможность человеку успешно справляться с неопределенными ситуациями
в условиях, когда решения необходимо принимать оперативно, и, как правило, такие оперативные решения дают наиболее продуктивные
результаты.
3) Описанный выше характер отсроченного и опосредованного принятия решения при экспертной оценке ведет к тому, что эксперт
подсознательно незаинтересован в следствиях принимаемого им решения, что сказывается на рациональности экспертных оценок.
4) Слабоструктурированные объекты имеют, как правило уникальный характер, что затрудняет использование традиционных методов
получения экспертных оценок, ориентированных на достаточно большие группы экспертов. Использование методов, ориентированных
на одного (или нескольких экспертов) в условиях отсроченного принятия решения существенно повышает влияние субъективности
рассуждений отдельного человека (шкалированности и традуктивности выводов, некорректного построения причинно-следственных
связей, сценарности выводов ) на принимаемые решения.
Вышеперечисленные недостатки обусловлены тем, что общепринятый принцип построения интеллектуальной САУ (см. рис.1.10) основан
рис.1.10) основан
на одномоментном процессе обучения системы, оторванном от непосредственного управления с последующей коррекцией знаний человеком
или группой лиц. Инициатором обучения и коррекции знаний в данном случае является человек, т.е. речь идет об обучающейся системе
и опосредованном процессе обучения, разнесенным во времени с процессом управления. Если прибегнуть к аналогии с обучением
ребенка, который приобретает знания путем самостоятельных действий над объектами окружающего мира и общения с другими людьми
(это естественно, поскольку мы стремимся сообщить системе управления интеллектуальные свойства человека), то становится очевидным,
что в интеллектуальной САУ приобретение знаний должно происходить по инициативе самой системы управления [16]. Одна из возможных
структур такой самообучающейся системы представлена на рис.1.11. Подобная система может не подвергаться предварительному обучению.
При первоначальном подключении системы к объекту управления база знаний интеллектуальной системы пока остается незаполненной,
а всю ответственность по управлению берет на себя ЛПР. При помощи блока-анализатора система постоянно отслеживает действия
ЛПР и в ходе диалога с ним выясняет, какие переменные состояния и управления объекта побудили ЛПР принять данное решение об
управлении объектом в текущий момент времени, каким образом оператор соотносит текущие переменные состояния и управления с
соответствующими лингвистическими переменными и нечеткими множествами. Последовательно накапливая такую информацию, система
формирует функции принадлежности нечетких множеств блоков ввода и вывода знаний, а также таблицу нечетких отношений между
лингвистическими переменными, отражающую решения ЛПР по управлению объекта. Чем дольше работает система, тем меньше неизвестных
ей ситуаций будет возникать при управлении объектом, тем чаще она будет выдавать в качестве совета свой вариант управления
объектом, как реакцию на его текущее состояние. Однако, при любом несоответствии решений системы и ЛПР, система будет инициировать
Однако, при любом несоответствии решений системы и ЛПР, система будет инициировать
диалог с целью уточнения своей базы знаний и методов представления знаний. В такой системе функции принадлежности нечетких
множеств блоков ввода-вывода знаний, а также правила управления в таблице нечетких отношений лингвистических переменных постоянно
корректируются
Рис.1.11. Интеллектуальная САУ с функциями самообучения
В процессе управления база знаний может пополняться как количественно (по числу нечетких отношений), так и качественно, если
при управлении объектом возникают ранее неизвестные факторы (лингвистические переменные), учитываемые ЛПР. При стабильной
работе объекта и отсутствии действий со стороны ЛПР система может самостоятельно анализировать базу знаний и дополнять ее
до полной группы событий (причин изменения управления), отбирать и уточнять противоречивые правила управления в таблице нечетких
отношений путем диалога с ЛПР.
Этот продолжающийся и в настоящее время этап в развитии интеллектуальных САУ, их дальнейшая «интеллектуализация» по шкале
IPDI путем введения в них функций самообучения имеет множество направлений решения задачи «обучения системы самообучению»:
использование методов эволюционного моделирования и эволюционных алгоритмов, применение нейронных сетей, использование ассоциативных
запоминающих устройств и т.п. Именно в этой области развития интеллектуальных САУ при разработке теории и практики построения
так называемых открытых систем, т.е. систем, способных с течением времени совершенствовать свое поведение благодаря заложенным
в них алгоритмам обучения, формируется сейчас новое научное направление – теория интеллектуальных машин. Однако, вне зависимости
от выбранного направления развития адаптивных способностей интеллектуальных САУ большинство открытых интеллектуальных САУ
при обработке знаний опираются на лингвистический подход на базе теории нечетких множеств и лингвистической переменной. Это
Это
дает возможность предположить, что открытые системы будущего будут в основном использовать при работе со знаниями методы теории
нечетких множеств и нечеткой логики – логики, которая ближе по духу к человеческому мышлению и естественным языкам, чем традиционные
логические системы; логики, которая предоставляет наиболее эффективные средства отображения неопределенностей и неточностей
реального мира и позволяет построить модель, максимально приближенную к реальности.
Написание пользовательского Call Of Cthulhu Adventure
Разделите длинные предложения на два и убедитесь, что каждый отдельный абзац состоит только из одного понятия.
Кроме того, различайте размер предложений. Слишком много ограниченных предложений звучит прерывисто, хотя слишком много очень длинных предложений пахнет монотонностью. Хитрость здесь в том, чтобы использовать хорошие знаки препинания. Или вы можете использовать маркированные или нумерованные списки и подзаголовки, чтобы упростить просмотр книги. Развивайте свой тезис.
Или вы можете использовать маркированные или нумерованные списки и подзаголовки, чтобы упростить просмотр книги. Развивайте свой тезис.
автор эссе для вас https://www.storeboard.com/blogs/education/too-much-homework/945617 University of Birmingham Ваша диссертация должна быть кратким изложением того, о чем речь, фразой, описывающей вашу тему. Например, «Я собираюсь объяснить, как разобрать карбюратор» или «В этой речи вы узнаете, как появилась застежка-молния» могут быть очень хорошими тезисами. Подготовьте несколько надежных мотивов, почему они должны делать то, что хотите вы.
- Как написать эссе в последнюю минуту
- Как написать профессиональное эссе о себе
- Общая классификация основных типов эссе: 10 лучших
- Как написать эссе Введение в среднюю школу
- Как написать хорошее аргументированное эссе Заключение
Как написать эссе на английском языке
Начните с мозгового штурма шести-десяти хороших факторов.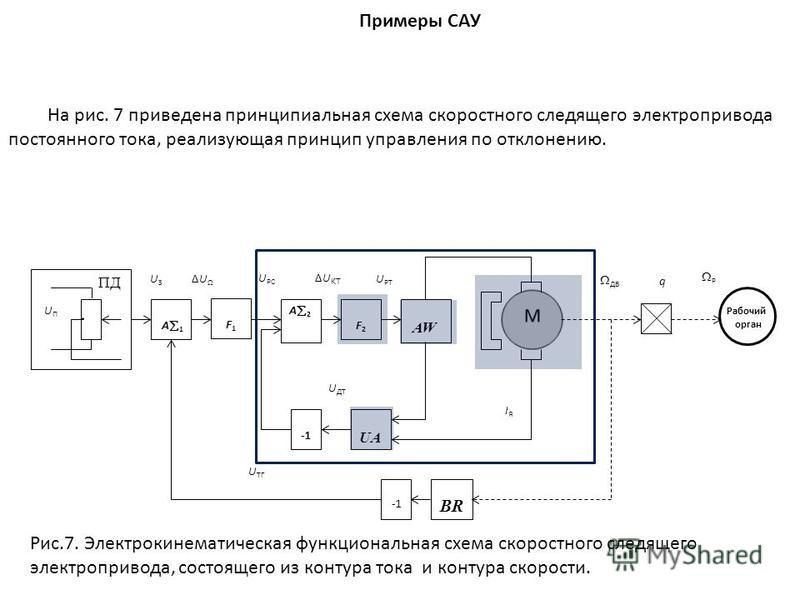 Объедините все те, которые тщательно связаны с тремя ключевыми принципами, а затем ранжируйте их в соответствии с их относительной важностью. Мошенниками квалифицируется не только наше благополучие и место жительства. Наша этика и громкое имя также являются основными целями. Мошенники в мире организаций, университетов, факультетов и так далее.
Объедините все те, которые тщательно связаны с тремя ключевыми принципами, а затем ранжируйте их в соответствии с их относительной важностью. Мошенниками квалифицируется не только наше благополучие и место жительства. Наша этика и громкое имя также являются основными целями. Мошенники в мире организаций, университетов, факультетов и так далее.
будет плести обманы по всей реальности и наносить ущерб этике, что место после звука. Поскольку 50-процентная правда (.никто конкретно никогда не узнает. ты можешь быть в изобилии. продолжай, ты этого достоин и т. д.) падает на открытые уши и умы, восприимчивые к эгоизму и жадности. Следующая проблема, которую они знают, заключается в том, что они сами захлопнули ловушку. Можете ли вы получить задание, не имея диплома о высшем образовании? Во-первых, я приветствую ваши методы аранжировки, а также мускулатуру ваших пальцев (эти предыдущие пишущие машинки похожи на экскурсию по комнате для избыточного веса).
Но я должен сказать, что заключительный продукт или услуга ваших попыток резюме, к сожалению, будет криком на планету Tohoku Universityessay автора Detroit French, что вы можете быть очень низкими технологиями.Не хорошо.
Особенно на современном рынке задач с вашими конкурентами LinkedIn, Twitter и текстовыми сообщениями на невероятном уровне. Как вы можете объяснить, если ваше резюме строится, вы кажетесь мелким специалистом? Любые очень хорошие бабушки и дедушки хотят, чтобы их внуки были успешными в жизни, и если обычно это означает, что они предлагают им деньги на обучение, чтобы улучшить их образование и обучение, они обычно так и делают. Тем не менее, студент не должен просто прийти и спросить об этом. Может быть невежливо связываться с другим человеком только для одолжения.
Успокойтесь, позвонив или заглянув для проверки только для расслабленных функций. После ряда таких падений ученый может начать общаться о повседневной жизни факультета, рано или поздно поднимая тему обвинений.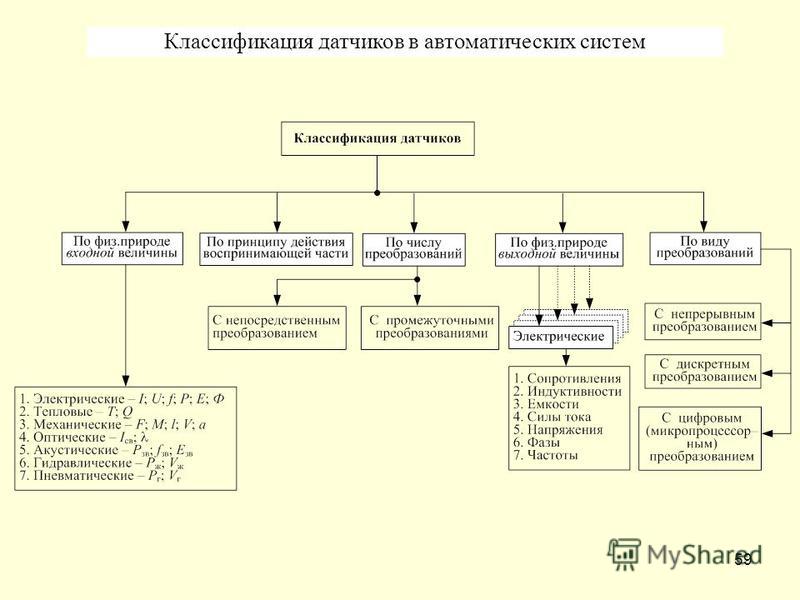 Одна вещь, которую часто игнорируют ораторы, заключается в том, что, несмотря на то, что вы единственный на сцене, вы не самый важный человек в комнате. На самом деле важны зрители. Вы хотите удовлетворить их потребности, развлечь их и поделиться некоторыми знаниями или ноу-хау, которых у них не было прямо перед вашим выступлением.Если вы даете убедительную речь предметной области, они должны быть полностью готовы придерживаться вашего призыва к действию в конце.
Одна вещь, которую часто игнорируют ораторы, заключается в том, что, несмотря на то, что вы единственный на сцене, вы не самый важный человек в комнате. На самом деле важны зрители. Вы хотите удовлетворить их потребности, развлечь их и поделиться некоторыми знаниями или ноу-хау, которых у них не было прямо перед вашим выступлением.Если вы даете убедительную речь предметной области, они должны быть полностью готовы придерживаться вашего призыва к действию в конце.
Заставьте их относиться к вашей теме. Вы получаете только 1 вероятность. Глубоко в Сибири Трутт был быстро одобрен людьми, как христианами, так и нехристианами. «Обычно обо мне очень хорошо заботились», — заявил он. Труэтт начал работать в городских и региональных больницах, раздавая Библии и проповедуя в космосе. Он провел в среднем по пять часов в каждой больнице и привез врачам много необходимых медицинских товаров.Он молился вместе с людьми и выступал перед семьями больных. Выше голову! На самом деле все не так плохо, как кажется! Вы когда-нибудь слышали об этом замечательном факторе, называемом всемирной паутиной? Это круто! У этих типов множество коллективных знаний и помощь в получении! Подумайте о своем выборе из бесконечной коллекции руководств, программных предложений, загрузок и обширных методов. Используй это.
Используй это.
Включите самостоятельно, чтобы убедиться в правильности курса.
ROLLINSFORD РАЗДЕЛ E: Услуги поддержки
Раздел E : система классификации политик обеспечивает репозиторий заявлений о неучебных услугах и программах, включая большинство из тех, которые относятся к сфере управления бизнесом, таких как безопасность, здания и управление (не строительство), транспорт, общественное питание.
| КОД | НАЗВАНИЕ | ОБНОВЛЕНО |
|---|---|---|
| EB | Объединенный комитет по управлению убытками | Июнь 2013 г. |
| EBB | Школьная безопасность | Июнь 2013 г. |
| EBBA | Меры предосторожности против заболеваний, передающихся через кровь | Июль 2011 г. |
| EBBA-R | План контроля воздействия для защиты от болезней, передающихся через кровь | Июль 2011 г.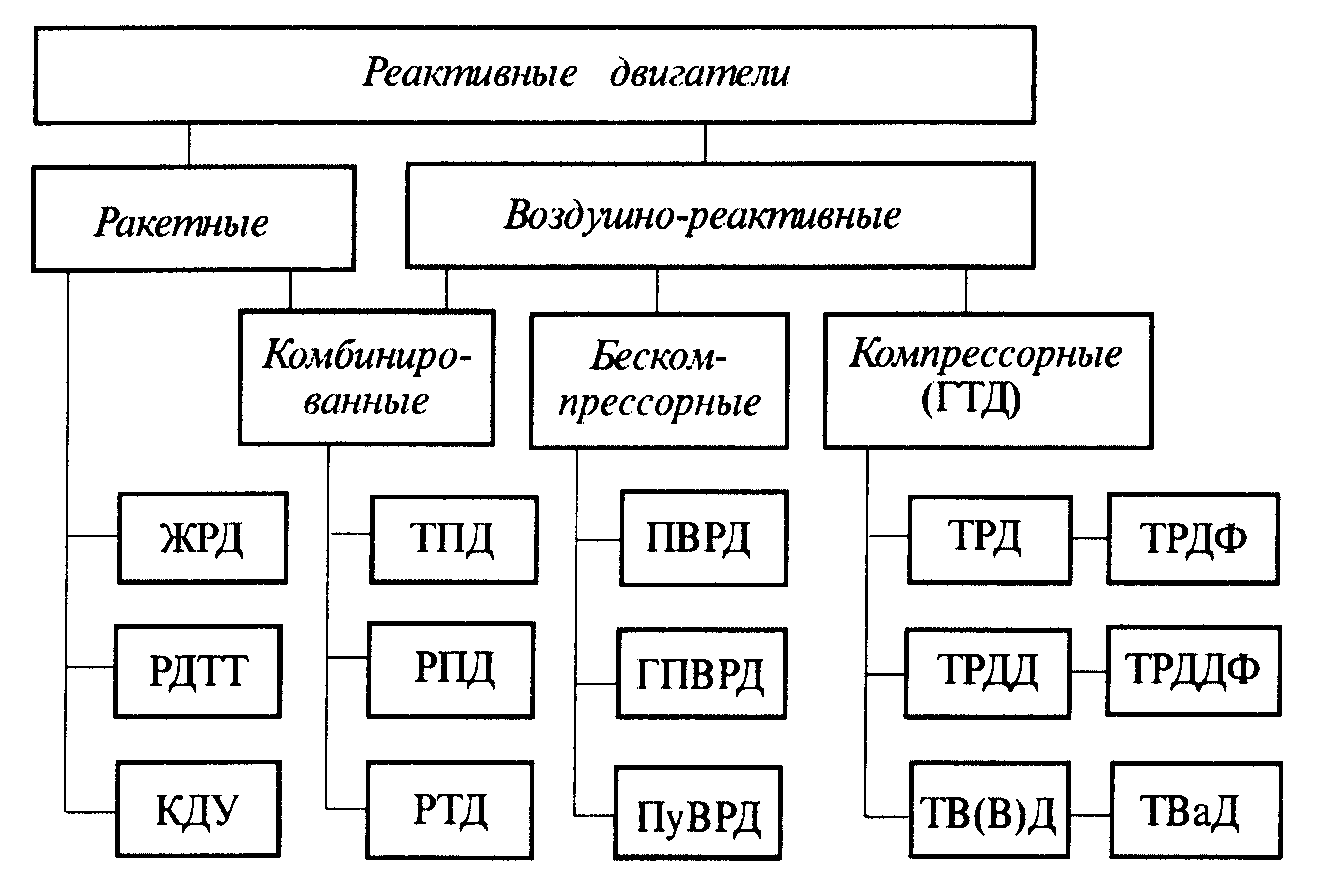 |
| EBBB | Отчеты об авариях | Июль 2011 г. |
| EBBC | Неотложная помощь и первая помощь | Ноябрь 2016 г. |
| EBBD | Качество воздуха в помещении | Июль 2014 г. |
| EBC | Предотвращение кризисов и реагирование на них | Отозван 12 марта 2020 г. |
| EBCA | Планы предотвращения кризисов и реагирования на чрезвычайные ситуации | 12 марта 2020 г. |
| EBCA-R | Контрольный список планов действий в чрезвычайных ситуациях | Июль 2013 г. |
| EBCB | Противопожарные учения | Июль 2011 г. |
| EBCC | Угроза взрыва | Июль 2011 г. |
| EBCD | Аварийное закрытие | Июль 2011 г. |
| EBCE | Закрытие и отмена школ | Июль 2011 г. |
| EBCF | Пандемия/Чрезвычайные эпидемические ситуации | 11 февраля 2021 г. |
| EBCG | Инфекционные и инфекционные заболевания | Принят 11 февраля 2021 г. |
| EC | Управление зданиями и территориями | Декабрь 2012 г. |
| ECA | Охрана зданий и территорий | Июль 2011 г. |
| ECF | Энергосбережение | Сентябрь 2008 г. |
| ECAC | Вандализм | Июль 2011 г. |
| ECAF | Аудио-видеонаблюдение в автобусах | Сентябрь 2017 г. |
| EDC | Разрешенное использование школьных материалов | Июль 2011 г. |
| EDCA | Использование сотрудниками электронных средств связи | Сентябрь 2009 г. |
| ЕЭЗ | Транспортные услуги для студентов | Ноябрь 2016 г. |
| EEAA | Видео- и аудионаблюдение за школьной собственностью | Декабрь 2019 г. |
| EEAE | Программа безопасности автобусов | Июль 2011 г. |
| EEAF | Автобусы специального назначения | Июль 2011 г. |
| EEAG | Перевозка студентов частным транспортом | Июль 2014 г. |
| EEAEA | Обязательное тестирование на наркотики и алкоголь | Июль 2011 г. |
| EEAEC | Поведение учащихся в школьных автобусах | Июль 2011 г. |
| EEAED | Информация о реестре сексуальных преступников | Июль 2011 г. |
| EF | Управление общественного питания | Октябрь 2016 г. |
| EFA | Наличие и распространение здоровой пищи | Июль 2014 г. |
| EFAA | Студенческое питание Оплата питания, оплата и управление счетом за питание | 11 июня 2020 г. |
| EFC | Политика бесплатных и льготных цен на обед | Июль 2011 г.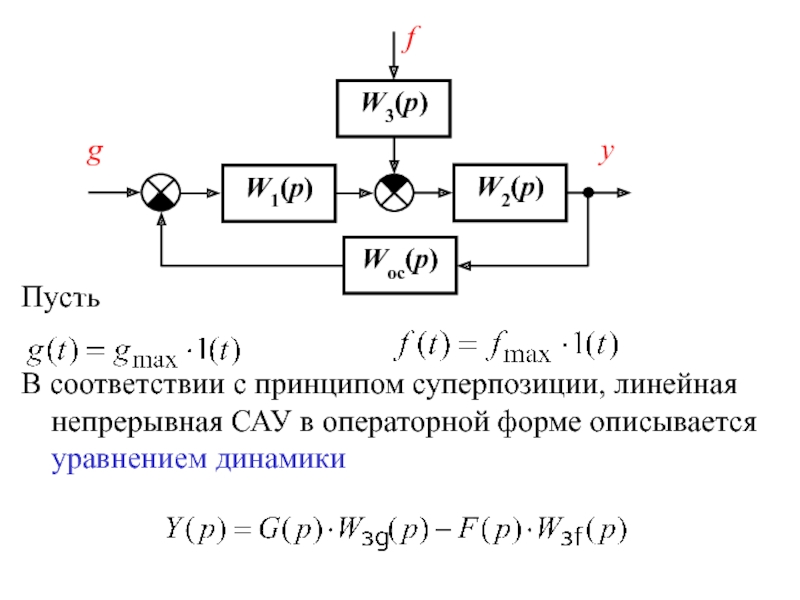 |
| EFE | Торговые автоматы | Июль 2011 г. |
| EH | Публичное использование школьных документов | 14 января 2021 г. |
| EH-R | Административные процедуры для публичного доступа к окружным записям «Запросы о праве знать» | Принято 14 января 2021 г. |
| EHAA | Штатный персонал Компьютерная безопасность, электронная почта и интернет-связь | Январь 2016 г. |
| EHAAA | Информационные технологии | Июль 2011 г. |
| EHAB | Управление данными и безопасность | 8 августа 2019 г. |
| EHAC | Электронные/цифровые записи и подписи | Принято 22 октября 2020 г. |
| EHB | Хранение данных/записей | 14 ноября 2019 г. |
| EHB-R | График хранения местных записей | 14 ноября 2019 г. |
| EI | Управление рисками | Июль 2011 г. |
| ЕИБ | Страхование ответственности | Июль 2011 г. |
| EID | Страхование | Июль 2011 г. |
границ | Классификация организации фибрилляции с использованием электрокардиограммы для управления лечением, направленным на механизм
1.Введение
Фибрилляция предсердий (ФП) и фибрилляция желудочков (ФЖ) представляют собой комплексные нарушения сердечного ритма с растущей распространенностью (Zheng et al., 2001; Morillo et al., 2017; Martín-Yebra et al., 2019). Как ФП, так и ФЖ демонстрируют вариабельность распространения электрического тока через миокард от удара к удару, и механизмы, которые инициируют и поддерживают эти ритмы, до конца не изучены.
Ограниченное понимание механизмов фибрилляции миокарда связано главным образом с ex vivo исследованиями оптического картирования трансмембранных потенциалов с помощью потенциометрических красителей (Laughner et al.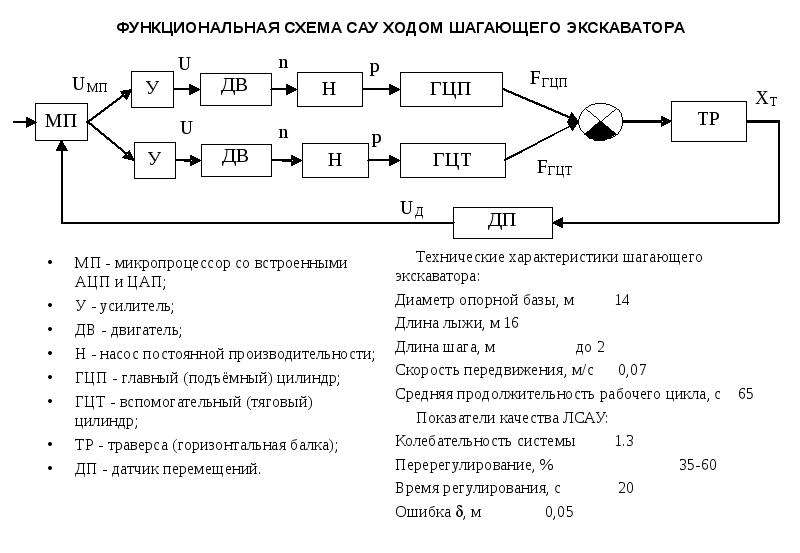 , 2012), которые выявили несколько конкурирующих механизмов (Handa et al., 2021). Гипотеза множественных вейвлетов предполагает, что фибрилляция представляет собой хаотический неорганизованный ритм, поддерживаемый несколькими вейвлетами электрической активности, которые извиваются, сталкиваются и непрерывно регенерируют (Moe et al., 1964; Krummen et al., 2016). Конкурирующая гипотеза состоит в том, что фибрилляция представляет собой пространственно-временной организованный феномен, поддерживаемый одним или несколькими вращательными драйверами (RD). RD представляют собой спиральные волны электрического распространения, которые сохраняются вокруг точки фазовой сингулярности, могут прикрепляться к определенным областям и/или извиваться в миокарде, генерируя волновые фронты фибрилляции (Pandit and Jalife, 2013).Также было показано, что множественные дезорганизованные быстроразряжающиеся очаги в миокарде поддерживают фибрилляцию (Lee et al., 2015), в то время как совсем недавно был предложен более сложный механизм асинхронной эндо-эпикардиальной диссоциации фибриллярной проводимости при ФП (de Groot и др.
, 2012), которые выявили несколько конкурирующих механизмов (Handa et al., 2021). Гипотеза множественных вейвлетов предполагает, что фибрилляция представляет собой хаотический неорганизованный ритм, поддерживаемый несколькими вейвлетами электрической активности, которые извиваются, сталкиваются и непрерывно регенерируют (Moe et al., 1964; Krummen et al., 2016). Конкурирующая гипотеза состоит в том, что фибрилляция представляет собой пространственно-временной организованный феномен, поддерживаемый одним или несколькими вращательными драйверами (RD). RD представляют собой спиральные волны электрического распространения, которые сохраняются вокруг точки фазовой сингулярности, могут прикрепляться к определенным областям и/или извиваться в миокарде, генерируя волновые фронты фибрилляции (Pandit and Jalife, 2013).Также было показано, что множественные дезорганизованные быстроразряжающиеся очаги в миокарде поддерживают фибрилляцию (Lee et al., 2015), в то время как совсем недавно был предложен более сложный механизм асинхронной эндо-эпикардиальной диссоциации фибриллярной проводимости при ФП (de Groot и др. , 2016).
, 2016).
Варианты лечения для пациентов с риском ФЖ и страдающих ФП в настоящее время являются эмпирическими и не нацелены на конкретный механизм фибрилляции. Пережившим ФЖ, которые подвергаются дальнейшему риску будущих эпизодов, обычно предлагается имплантация кардиовертера-дефибриллятора для прекращения эпизодов ФЖ, в то время как изоляция легочных вен (PVI) для электрического отключения тела предсердия от легочных вен (где быстрое срабатывание может вызвать ФП) является единственным доказанным методом. эффективное лечение ФП (Sau et al., 2019). Отсутствие какого-либо целенаправленного лечения пациентов с ФП, в частности, привело к ограниченным показателям успешности катетерной аблации персистирующей ФП (Schreiber et al., 2015). Существует настоятельная необходимость перейти от универсального подхода эмпирического лечения к лечению, направленному на механизмы.
Недавно мы показали, что существует целый ряд механизмов ФП и ФЖ, с различной степенью глобальной организации, с использованием оптического картирования ex vivo эксплантированных перфузированных сердец и инвазивного внутрисердечного картирования у пациентов, перенесших аблацию ФП (Handa et al. , 2020). Только некоторые формы ФП глобально организованы и обусловлены стабильными РЗ, и они потенциально поддаются абляции, нацеленной на РД, в то время как другие формы ФП глобально дезорганизованы без четких драйверов и, как таковые, могут реагировать на компартментализацию предсердий. Возможным подходом к индивидуальной индивидуальной терапии может быть выбор подходящего лечения на основе конкретных электрофизиологических механизмов, поддерживающих фибрилляцию у каждого конкретного пациента (Ng et al., 2020).В идеале мы могли бы идентифицировать механизм неинвазивно.
, 2020). Только некоторые формы ФП глобально организованы и обусловлены стабильными РЗ, и они потенциально поддаются абляции, нацеленной на РД, в то время как другие формы ФП глобально дезорганизованы без четких драйверов и, как таковые, могут реагировать на компартментализацию предсердий. Возможным подходом к индивидуальной индивидуальной терапии может быть выбор подходящего лечения на основе конкретных электрофизиологических механизмов, поддерживающих фибрилляцию у каждого конкретного пациента (Ng et al., 2020).В идеале мы могли бы идентифицировать механизм неинвазивно.
Электрокардиограмма (ЭКГ) является неотъемлемой частью кардиодиагностики и рутинной помощи. С появлением машинного обучения возрос интерес к расширению диагностических возможностей ЭКГ за пределы качественной оценки человека (Fan et al., 2018). Обработка сигналов ЭКГ была реализована при ФП (Meo et al., 2013), где было показано, что определенные особенности сложности ЭКГ коррелируют с долгосрочным успехом катетерной аблации (Lankveld et al. , 2016). Традиционные методы обработки сигналов в виде анализа доминирующей частоты (DF) (Uetake et al., 2014) и энтропийного анализа (Alcaraz and Rieta, 2012) использовались для анализа поверхностных ЭКГ ФП в дополнение к более новым методам, таким как анализ мощности волны фибрилляции (FWP) и амплитуды волны фибрилляции (FWA) (Lankveld et al., 2016) для прогнозирования результатов лечения. В недавнем исследовании использовались сверточные нейронные сети для идентификации ЭКГ-сигнатур ФП только по ЭКГ нормального синусового ритма с точностью 83.3% и предложил его в качестве инструмента для устранения необходимости в дорогостоящем длительном мониторинге ЭКГ для диагностики ФП (Attia et al., 2019).
, 2016). Традиционные методы обработки сигналов в виде анализа доминирующей частоты (DF) (Uetake et al., 2014) и энтропийного анализа (Alcaraz and Rieta, 2012) использовались для анализа поверхностных ЭКГ ФП в дополнение к более новым методам, таким как анализ мощности волны фибрилляции (FWP) и амплитуды волны фибрилляции (FWA) (Lankveld et al., 2016) для прогнозирования результатов лечения. В недавнем исследовании использовались сверточные нейронные сети для идентификации ЭКГ-сигнатур ФП только по ЭКГ нормального синусового ритма с точностью 83.3% и предложил его в качестве инструмента для устранения необходимости в дорогостоящем длительном мониторинге ЭКГ для диагностики ФП (Attia et al., 2019).
В этом исследовании мы стремились выяснить, можно ли определить степень глобальной организации ФЖ и ФП и лежащие в их основе механизмы фибрилляции с помощью системы классификации машинного обучения, основанной только на неинвазивной записи ЭКГ. Во-первых, эпикардиальная активность VF была зарегистрирована в ex vivo эксплантированных перфузированных сердцах крыс с оптическим картированием с высоким пространственным разрешением.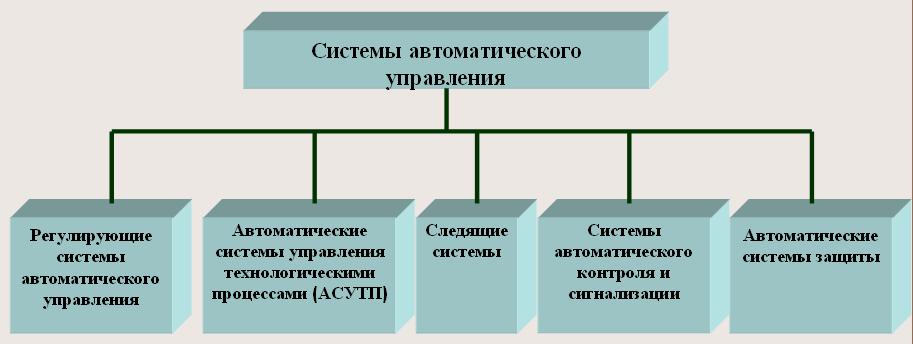 Механизм был классифицирован с помощью фазового анализа как глобально хаотический и управляемый несколькими вейвлетами или глобально организованный и управляемый RD. Эта характеристика была обозначена как основная истина для маркировки соответствующей одноканальной ЭКГ, записанной во время исследований оптического картирования, и для обучения модели машинного обучения (Li et al., 2019; Handa et al., 2020). После разработки и подтверждения нашей характеристики механизмов ФЖ по ЭКГ мы обучили модель на поверхностных ЭКГ ФП человека у пациентов с персистирующей ФП, чтобы определить точность прогнозирования в классификации лежащей в основе организации/механизма ФП, определяемой инвазивным внутрисердечным картированием.Для обоих наборов данных предложенные схемы классификации были оценены по принципу исключения-один-исключение (LOO), и результаты классификации показали, что предложенный метод правильно предсказал уровень организации по ЭКГ ФЖ крыс с чувствительностью 75%, специфичностью 80% и точность 78%, а по клинической ЭКГ ФП — чувствительность 80%, специфичность 92% и точность 88%.
Механизм был классифицирован с помощью фазового анализа как глобально хаотический и управляемый несколькими вейвлетами или глобально организованный и управляемый RD. Эта характеристика была обозначена как основная истина для маркировки соответствующей одноканальной ЭКГ, записанной во время исследований оптического картирования, и для обучения модели машинного обучения (Li et al., 2019; Handa et al., 2020). После разработки и подтверждения нашей характеристики механизмов ФЖ по ЭКГ мы обучили модель на поверхностных ЭКГ ФП человека у пациентов с персистирующей ФП, чтобы определить точность прогнозирования в классификации лежащей в основе организации/механизма ФП, определяемой инвазивным внутрисердечным картированием.Для обоих наборов данных предложенные схемы классификации были оценены по принципу исключения-один-исключение (LOO), и результаты классификации показали, что предложенный метод правильно предсказал уровень организации по ЭКГ ФЖ крыс с чувствительностью 75%, специфичностью 80% и точность 78%, а по клинической ЭКГ ФП — чувствительность 80%, специфичность 92% и точность 88%.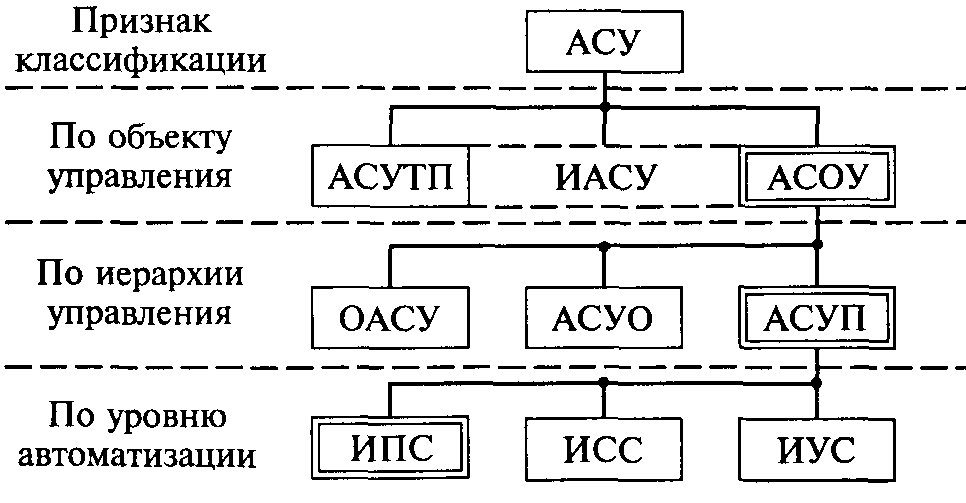 Точная классификация организации и механизма фибрилляции с использованием ЭКГ может обеспечить более индивидуальное лечение, основанное на конкретном механизме аритмии.
Точная классификация организации и механизма фибрилляции с использованием ЭКГ может обеспечить более индивидуальное лечение, основанное на конкретном механизме аритмии.
2. Сбор данных и маркировка данных
Цель предлагаемой системы классификации состоит в том, чтобы дифференцировать организованные и дезорганизованные формы фибрилляции по поверхностной ЭКГ. Организованная фибрилляция обычно вызывается RD, тогда как неорганизованная фибрилляция — несколькими вейвлетами (Handa et al., 2020). Этот новый метод в конечном итоге может быть использован для выбора пациентами индивидуальных вариантов лечения. Два набора данных, использованных для оценки модели, были получены в результате недавнего исследования нашей группы, а методология сбора данных была подробно описана ранее (Handa et al., 2020). Данные оптического картирования ФЖ были получены путем проведения оптического картирования трансмембранного потенциала перфузированных сердец крыс ex vivo , а клинические данные ФП были получены у пациентов с персистирующей ФП с использованием внутрисердечных мультиполярных катетерных записей электрограмм (ЭГМ) во время процедур катетерной аблации. Параллельные поверхностные ЭКГ также регистрировались для крысиной ФЖ и человеческой ФП.
Параллельные поверхностные ЭКГ также регистрировались для крысиной ФЖ и человеческой ФП.
Для крысиной модели ФЖ маркировку уровня организации фибрилляций проводили с использованием фазового картирования, описанного ниже.Для клинических данных ФП, где запись с высоким разрешением была недоступна, для маркировки клинической ЭКГ использовался анализ причинно-следственной связи по Грейнджеру (GC) данных внутрисердечной ЭГМ. Схема дизайна исследования показана на рисунке 1. Подробно описана методология фазового анализа и анализа ГХ (Handa et al., 2020). Подробная информация о методах анализа и маркировке кратко представлена в следующем разделе.
Рисунок 1 . Схематическое изображение предлагаемого метода, оцененного различными наборами.Для данных о фибрилляции желудочков (VF) крысы, как показано в (A) , ЭКГ была помечена результатами обнаружения вращательного драйвера (RD) из фазового картирования. Для клинических данных о мерцательной аритмии (AF), как показано в (B) , GC анализ данных электрограммы (EGM) был меткой суррогатной организации для классификации ЭКГ.
Данные для картирования ФП были собраны в лаборатории электрофизиологии сердца больницы Хаммерсмит. Утверждение было дано Местным комитетом по исследованиям и этике Imperial College Healthcare NHS Trust, и от всех пациентов было получено письменное информированное согласие.Данные картирования ЛП были получены у 17 пациентов с персистирующей ФП. Данные электроанатомического картирования были собраны с использованием системы EnSite™ Velocity™ (Abbott Inc, Миннесота, США). В день операции все пациенты поступили в ФП. Доступ к левому предсердию осуществляли с помощью трансептальной пункции. Картографический катетер A-Focus II™ с 20 кольцевыми электродами (Abbot Inc., Миннесота, США) (двойная петля, длина электродов 1 мм, расстояние между электродами 4 мм) использовался для получения геометрии ЛП и ЭГМ. ЭГМ собирали при стабильном контакте с тканью на поверхности эндокарда.Данные легочных вен и ушка левого предсердия были исключены из анализа. Данные были собраны как у персистирующей ФП, так и у подгруппы пациентов с синусовым ритмом после кардиоверсии постоянным током. Биполярные ЭГМ были отфильтрованы при полосовой фильтрации 30–500 Гц. Эндокардиальная область, охваченная катетером для картирования A-FocusII™, была названа «ядром». Для каждого заданного ядра последовательно анализировались 20-секундные данные.
Количество собранных ядер, а затем и количество сегментов, проанализированных в этой статье, варьировалось у разных пациентов из-за разной геометрии левого предсердия и стабильности катетера.Была предпринята попытка подробно отобразить левое предсердие для всех субъектов, таким образом, влияние неоднородности будет сведено к минимуму в конечном анализе. Сводную характеристику пациентов можно найти в таблице 1.
Таблица 1 . Характеристики пациентов инвазивного набора клинических данных.
2.1. Фазовое картирование крысиных данных VF
Для модели ФЖ крыс девять ex vivo перфузированных сердец крыс подверглись оптическому картированию эпикардиальной поверхности левого желудочка с высоким разрешением после индукции ФЖ с помощью запрограммированной электрической стимуляции, и одноканальная ЭКГ была записана одновременно с частотой дискретизации 1000 Гц.
Фазовый анализ является золотым стандартом для анализа сигналов фибрилляции (Nattel et al., 2017). Фазовое картирование было применено к данным оптического картирования для выявления фазовых особенностей (PS) и RD для дальнейшей маркировки. Все наши методы анализа данных флуоресценции оптического картирования подробно описаны ранее (Ng et al., 2013, 2016; Roney et al., 2017; Li et al., 2019; Handa et al., 2020). В этом исследовании RD был определен как PS с более чем двумя полными оборотами.На рисунке 1А показана маркировка ЭКГ, основанная на идентификации RD: ЭКГ идентифицируются как организованные, если пространственно-временно стабильные RD поддерживают ФЖ при оптическом картировании, и дезорганизованные, если ФЖ управляется хаотическими волновыми фронтами без идентифицируемого стабильного RD.
2.2. ГХ-анализ клинических данных ФП
Для клинических данных ФП (17 субъектов) были использованы альтернативные методы анализа, основанные на анализе GC, для классификации организационных уровней записей фибрилляций, поскольку фазовый анализ внутрисердечных ЭГМ затруднен из-за нескольких проблем, включая низкое пространственное разрешение клинических данных (Roney et al. ., 2017).
Причинность по Грейнджеру представляет собой измерение взаимозависимости сигналов и ранее использовалась для определения доминирующих паттернов распространения волнового фронта при фибрилляции (Luengo et al., 2016, 2018; Rodrigo et al., 2016; Alcaine et al., 2017). В нашем предыдущем исследовании два измерения, полученные из GC, индекса причинно-следственной связи (CPI) и значения круговой взаимозависимости (CIV), были применены к внутрисердечной ЭГМ для количественной оценки уровня организации ФП, обнаружения RD и определения вероятного механизма, поддерживающего фибрилляцию (Handa). и другие., 2020). В этом исследовании CPI и CIV, рассчитанные по данным внутрисердечной электрограммы (ЭГМ), использовались для обозначения соответствующих поверхностных ЭКГ как организованной или дезорганизованной фибрилляции. Чтобы сделать эту работу самостоятельной, расчет ИПЦ и CIV будет представлен в следующем разделе.
2.2.1. Индекс сопряжения причинно-следственных связей
Из многовариантного сердечного сигнала x(t)∈Rnc в момент времени t размерности n c GC выводится путем подгонки авторегрессионной (AR) модели к x ( т ) как
Â(τ)=argminA(τ)∑t=L+1nt||x(t)-∑τ=1LA(τ)⊤x(t-τ)||2+ λ∑τ=1L||A(τ )||1, τ=1,…,L (1)
A(τ)∈Rnc×nc — матрица коэффициентов AR, τ — временной лаг, L — максимальный временной лаг модели, λ — коэффициент регуляризации.Пусть x i ( t ) будет i -й строкой x ( t ). Элемент i -й строки и j -го столбца, A (τ, i, j ), отражает силу x i ( t 9 ) в прогнозировании x 9049 049 ( T ), или другими словами, временная зависимость между x 9044 т ).
Проблема оптимизации в уравнении 1 обычно называется подходом Лассо-Грейнджера (Valdés-Sosa et al., 2005; Arnold et al., 2007; Song and Bickel, 2011). С l 1 -термином регуляризации на основе нормы ∑τ=1L||A(τ)||1 подход Лассо-Грейнджера дает более разреженную и надежную оценку причинности по Грейнджеру. В этом исследовании для решения (уравнения 1) применяется прямая и обратная причинно-следственная связь Лассо Грейнджера, которая является более быстрой и надежной (Cheng et al., 2014).
С ограничением разреженности l 1 -norm, решение (уравнения 1) приводит к тому, что все элементы в Â(τ) равны нулю, если случайные отношения между определенными парами сигналов не очень сильны.Таким образом, измерение организации было рассчитано как процент ненулевых пар между различными сигналами.
Чтобы быть точным, определим S как множество, содержащее все ненулевые элементы в Â(τ), т. е.
S={â(τ,i,j) |a(τ,i,j)>0,i≠j, τ=1,…,L, andi,j=1,….,nc} (2)
где â(τ, i, j ) — элемент i -й строки и j -го столбца в Â(τ). ИПЦ получается следующим образом:
ИПЦ=|S|L(nc2-nc) (3)
где |·| — кардинальное число множества.
По уравнению (3) CPI количественно определяет глобальную фибриллярную организацию, вычисляя количество возможных пар сигналов Грейнджера-причины в фибрилляции, между которыми существуют эффекты распространения по нормализованной шкале 0–1, где 0 определяется как отсутствие возможных пар, имеющих причинно-следственная зависимость (наиболее неорганизованная) и 1, где все возможные пары имеют причинно-следственную зависимость (наиболее неорганизованная).
2.2.2. Значение круговой взаимозависимости
Циркулярное значение взаимозависимости является аналитическим инструментом для локализации RD на основе регионального анализа сердечных сигналов от направлений потока, обозначенных Â(τ).Пусть x i ( t ) будет i -м сигналом x ( t ). Основной индекс источника S S I для x I ( T ) определяется как сигнал с сильным причинным влиянием на x 8 I
si=argmaxj∑τÂ(τ,i,j), j=1,…,nc и j≠i (4)
Пусть P S I I и P P I Будьте координаты локаций, соответствующих x I ( T ) и x x x S 9 I ( т ) в глобальной координате, соответственно, и GC вектор для x I ( T ), G I , рассчитывается следующим образом
gi={psi-piif∑τÂ(τ,i,si)>0.0иначе. (5)
Вектор GC g i в уравнении (5) можно рассматривать как вектор исток-сток для электрода i , направленный от исходного электрода s i 9 9 9 я . Пусть p 0 будут координатами интересующего места. Тогда, потом направление вращения для P I относительно P 0 можно рассчитать как перекрестный продукт P I — P 0 и г i после нормализации, т.е.д.,
ri=pi-p0||pi-p0||×gi||gi|| ≡ri,1i+ri,2j+ri,3k (6)
, где i , j и k — стандартные базисные векторы, соответствующие осям x, y и z в глобальной координате соответственно. Предположим, что локальная координата, где находится Самолет XY P
8 0 , P P I , и P 8 S I С стандартными основаниями векторов I ~, J ~ и k~, соответствующие осям x, y и z соответственно.Определите начало локальной координаты как p 0 и
i~≡pi-p0||pi-p0|| (7)
Тогда направление вращения r i можно записать как
ri=r~i,1i~+r~i,2j~+r~i,3k~ (8)
, где r~i,1 и r~i,2 равны 0, а знак r~i,3 указывает направление возможной вращательной деятельности. Если вращение с центром p 0 по часовой стрелке, то r~i,3<0 и наоборот.
Примечание 1 .Я ~, j ~, и к ~ может варьироваться в зависимости от мест P
8 0 , P 8 I , и P S S i для i = 1, …, n c . Для спиральных катетеров (например, Lasso, Biosense Webster) в идеале все точки регистрации находятся в одной плоскости xy, и k~ одинаковы для всех i = 1, …, n c . Таким образом, глобальная координата и локальные координаты могут быть представлены только одной координатой для упрощения. Однако это упрощение неприменимо для корзинчатых катетеров .
С помощью уравнений (6) и (8) CIV рассчитывается как
CIV=|∑isign(r~i,3)|nn(p0) (9)
, где n n ( p 0 ) — количество доступных соседних записей около p 0 для количественной оценки вращательной активности.CIV колеблется от 0 до 1 и измеряет схемы распространения кровообращения, при этом пространственно стабильный RD дает высокое значение CIV, а извилистые нестабильные RD — низкое значение. Подробности использования CIV для обнаружения RD и его проверки можно найти в разделе методов и в нашем недавнем исследовании Handa et al. (2020).
2.2.3. Маркировка
В группе пациентов с персистирующей ФП каждому субъекту было выполнено подробное внутрисердечное картирование в предсердии с помощью картирующего катетера AFocusII с 20 электродами (St Jude Medical, Миннесота, США).Множественные области были нанесены на карту внутри предсердия с помощью катетера, записывающего 20 отдельных ЭГМ одновременно. CPI, мера организации фибрилляции, рассчитывалась для каждого набора записей AFocusII в данной области. Глобальный CPI рассчитывался как среднее значение CPI всех региональных записей AFocusII для субъектов. Критерии бинаризации 17 субъектов в наборах клинических данных ФП показаны на рисунке 1B. В частности, те, у кого RD-положительные области и CPI выше среднего CPI, были помечены как организованные, а те, у кого не было RD-положительных областей или CPI ниже среднего CPI, были неорганизованными.
3. Метод
3.1. Вычитание QRS
Частотный спектр отдельного комплекса QRS часто находится в диапазоне 10~30 Гц (Bollmann et al., 2006), а частоты, характеризующие предсердный сигнал, большей частью приурочены к интервалу 5~12 Гц (Lin, 2008). Из-за этого перекрытия между электрической активностью предсердий и комплексами QRS, вычитание QRS было применено к клиническому набору данных ЭКГ ФП. В частности, обнаружение QRS с последующей линейной интерполяцией, предложенное Ahmad et al.(2011) был принят. Нормальная продолжительность комплекса QRS составляет от 0,08 до 0,10 с. Чтобы убедиться, что желудочковая активность полностью удалена, точки, соответствующие продолжительности QRS 0,10 с, были вычтены и заменены линейно интерполированными точками с соотношением 5:6, т.е. с 5/11 точками до и 6/11 точками после обнаружения пика, как описано в Ahmad et al. (2011). Два примера вычитания QRS показаны на рисунке 2.
Рисунок 2 . Два примера вычитания QRS, примененного к набору данных ЭКГ ФП (отведение I).При обнаружении QRS точки, соответствующие продолжительности QRS 0,10 с, были заменены линейно интерполированными точками.
3.2. Извлечение признаков
В этом исследовании мы предлагаем использовать характеристику мощности диапазона (BP), т. е. мощность сигналов ЭКГ, соответствующих разным частотным диапазонам, для классификации типа организации. Учитывая, что частота сердечных сокращений у крыс заметно выше, чем у людей, в этом исследовании были выбраны разные диапазоны и настройки сегментации данных для извлечения признаков ФЖ крыс и клинической ФП ЭКГ.
Для модели ФЖ крыс одноканальные непрерывные записи ЭКГ были отобраны с частотой дискретизации 1000 Гц и сегментированы по 2-секундному окну со сдвигом окна на 1 с. DF крысиной VF колеблется от 10 до 20 Гц (Handa et al., 2018). Таким образом, сегментированные данные были отфильтрованы восемью временными фильтрами с полосой пропускания 4 Гц в диапазоне от 2~3 4 Гц (2~6 Гц, 6~10 Гц, … 30~34 Гц, полосовые фильтры Баттерворта четвертого порядка с допуск 2 Гц). В дополнение к мощности диапазона, модель AR была применена для увеличения количества функций для одноканальной ЭКГ крысы с ЖФ.Коэффициенты AR порядка 20 вместе с BP восьми полос были объединены и использованы в качестве вектора признаков. Таким образом, общее количество признаков для ЭКГ ФЖ крысы составило 28.
Для клинического набора данных ФП непрерывные записи ЭКГ в 12 отведениях были отобраны с частотой дискретизации 2034,5 Гц и сегментированы 8-секундным окном со сдвигом окна на 4 секунды. Затем сегментированные данные были отфильтрованы по четырем полосам, т. е. 5–15 Гц, 15–25 Гц, 25–50 Гц и 50–100 Гц (полосовые фильтры Баттерворта четвертого порядка с допуском 2 Гц).Установлено, что ФР ФП находится в диапазоне частот 3~12 Гц. Таким образом, большинство составляющих ЗЧ может быть охвачено полосой 5~15 Гц. Три другие более высокие полосы выбраны для захвата тонких высокочастотных характеристик сигналов. Для каждой полосы и каждого отведения была рассчитана мощность полосы, затем нормирована на общую мощность сигнала широкой полосы 2~200 Гц. С четырьмя нормализованными признаками АД, извлеченными для каждого отведения, общее количество признаков для клинического сегмента ЭКГ с ФП составило 48.
3.3. Выбор функции
Взаимная информация представляет собой измерение зависимости между признаками и метками классов и успешно применяется для выбора признаков признаков ВР временных рядов (Ang et al., 2012). Таким образом, в этом исследовании для выбора признаков была принята взаимная информация.
Учитывая признак f и метку класса c , взаимная информация формулируется следующим образом:
I(f,c)=H(c)-H(c|f) (10)
, где H ( c ) — индивидуальная энтропия метки класса c и H ( c | f ) — условная энтропия метки класса c данного признака c Это можно интерпретировать как уменьшение неопределенности в метке класса c благодаря наблюдению признака f Ang et al. (2012).
В этом исследовании метка класса c была уровнем организации. Для каждого признака BP или AR на этапе обучения вычислялась его взаимная информация с меткой класса c . Были отобраны и использованы на этапе классификации 50 % признаков с наибольшей взаимной информацией.
3.4.Классификация
В этом исследовании для прогнозирования на уровне организации были применены бинарный линейный дискриминантный анализ (LDA) и модель линейной регрессии. При обучении и тестировании модели использовались признаки 2-секундных сегментов ЭКГ. С результатами прогнозирования на уровне сегмента окончательный прогноз на уровне организации для каждого субъекта был получен путем голосования или усреднения. Для каждого субъекта итоговая метка класса была меткой класса, которая наиболее часто предсказывалась во время классификации сегментов.Субъект считался организованным, если предполагалось, что более половины сегментов будут организованы. Для клинических данных ФП также была протестирована модель линейной регрессии для непрерывного прогнозирования на уровне организации. В регрессионной модели среднее прогнозируемое значение всех сегментов использовалось в качестве окончательного прогноза субъекта.
Вся оценка проводилась в режиме LOO, при этом структура выбора признаков и классификации обучалась на сегментах данных восьми из девяти субъектов (ЭКГ ФЖ крысы) или 16 из 17 субъектов (клиническая ЭКГ ФП) и оценивалась на сегментах остальных предмет.Таким образом, для разных испытуемых в обучении могли быть выбраны разные признаки. Таким образом, сегменты данных для каждого субъекта не использовались для обучения модели, с которой они тестировались.
4. Экспериментальные результаты
4.1. ГХ-анализ клинических данных ФП
На рис. 3А показан пример векторной карты «источник-приемник», построенной для набора записей внутрисердечного мультиполярного (AFocusII) катетера при ФП. На нем показан сайт со стабильным RD с высоким CIV, приводящим к глобально организованной форме AF.Стрелки показывают направления векторов от источника к приемнику. Соответствующие ЭГМ показывают организованную вращательную активацию по часовой стрелке. В этом примере CIV 0,68 был выше порогового значения 0,60, которое является рабочей точкой, полученной с использованием данных VF крыс в нашем предыдущем исследовании для классификации RD-положительной области (Handa et al., 2020).
Рис. 3. (A) показывает векторную карту источника-приемника, построенную на основе внутрисердечного сигнала ЭГМ, указывающую на участок со стабильным RD с высоким значением круговой взаимозависимости (CIV).Стрелки показывают направления векторов от источника к приемнику. Соответствующие ЭГМ в (B) показывают организованную вращательную активацию по часовой стрелке: первым был активирован электрод 12, затем электроды 1, 4–8, 10 и 11, а за активацией электрода 11 последовала следующая активация электрода. 12. Рисунок воспроизведен из Handa et al. (2020) (CC BY 4.0).
На рис. 4 показаны гистограммы RD-положительных областей (рис. 4A) и CPI (рис. 4B) 17 субъектов клинического набора данных ЭКГ/ЭГМ ФП.Для этого набора данных 8 из 17 субъектов не имеют RD-положительных областей, а максимальное количество RD-положительных областей, выявленных при внутрисердечном картировании, составляет 4. Медиана CPI всех субъектов составляет 0,14. Среди девяти субъектов с RD-положительными областями пять субъектов с CPI выше 0,14 были отмечены как организованные, а те, у кого не было RD-положительных областей или CPI ниже среднего CPI, были неорганизованными.
Рисунок 4 . Гистограммы положительных областей RD и индекс причинно-следственной связи (CPI) 17 субъектов клинического набора данных ЭКГ / ЭГМ ФП.Большинство испытуемых имеют менее 2 RD-положительных областей, а медиана CPI всех испытуемых составляет 0,14.
4.2. Статистический корреляционный анализ
Чтобы выяснить, отражает ли поверхностная ЭКГ АД уровень организации ФП, измеренный инвазивно, был проведен корреляционный анализ Пирсона для проверки корреляции между нормализованными характеристиками мощности полосы и уровнем организации, количественно оцененным с помощью CPI для клинической ЭКГ ФП. Логарифм был применен, чтобы сделать распределение BP нормальным.Значение p меньше 0,05 считалось статистически значимым.
На рис. 5 показаны примеры результатов корреляции отведений I, V1 и III, где каждый закрытый кружок представляет одного субъекта. Таблица 2 суммирует все значимые корреляции с p <0,05. Значимые корреляции были обнаружены в двух относительно более высоких диапазонах, 25~50 Гц и 50~100 Гц. Наиболее сильная корреляция была с АД отведения V1, 25~50 Гц (β = –0,67; p < 0,01).С полосами более низких частот, т. е. 5~15 Гц и 15~25 Гц, значимой корреляции обнаружено не было. Корреляционный анализ показывает, что существует отрицательная корреляция между количеством высокочастотных компонентов в сигнале и уровнем глобальной фибриллярной организации для определенных отведений.
Рисунок 5 . Корреляция между логарифмом (мощностью полосы) различных полос и уровнем глобальной фибриллярной организации, измеренной с помощью индекса причинно-следственной связи (CPI). Значимые корреляции были обнаружены для более высоких частотных диапазонов 25~50 Гц и 50~100 Гц с определенными отведениями.
Таблица 2 . Результаты корреляции с клиническими данными о мерцательной аритмии (ФП).
4.3. Классификация уровня организации ECG
Предложенный метод был оценен LOO, и впоследствии количество обучающих и тестовых данных, передаваемых в классификатор, менялось. Для классификации ФЖ крыс количество обучающих выборок колеблется от 1856 до 2416, тестовых — от 17 до 577. Для клинических данных ФП количество обучающих выборок колеблется от 1368 до 1491, а тестовых — от 1368 до 1491. от 37 до 160.Результаты LOO-классификации как для крысиной ФЖ, так и для клинических данных ФП представлены в таблице 3, где c и ĉ являются истинными и предсказанными метками классов, соответственно, а « O » и « D » представляют организованные и соответственно дезорганизованные классы. n seg — общее количество сегментов данных на одного субъекта, а для клинических данных ФП также было включено количество картируемых областей n k .Для каждого субъекта окончательный прогноз был рассчитан путем голосования: субъект будет организованным, если более 50% сегментов были предсказаны как организованные, и неорганизованным, если меньше (или равно) 50%. В Таблице 3 также представлены P w , которые представляют собой процент сегментов, классифицированных как класс-победитель во время голосования. Матрицы путаницы классификации на сегментном и предметном уровнях показаны на рисунке 6. Для предсказания на предметном уровне чувствительность составляет 75 и 80%, специфичность — 80 и 91.67%, а точность составляет 77,78 и 88,24% для крысиной ФЖ и клинической ФП соответственно.
Таблица 3 . Результаты классификации по исключению (LOO) (%).
Рисунок 6 . Матрицы путаницы бинарной классификации уровня фибриллярной организации крысиной ФЖ и клинических данных ФП. (A) Крыса VF ЭКГ, уровень сегмента. (B) Крыса VF ЭКГ, уровень субъекта. (C) Клиническая ЭКГ ФП, уровень сегмента. (D) Клиническая ЭКГ ФП, субъектный уровень.
На рисунках 7A, B показано распределение трех наиболее отличительных признаков, выбранных с использованием взаимной информации, для ЭКГ с ФЖ крыс и клинической ЭКГ с ФП соответственно. На обеих панелях каждый кружок представляет одну функцию, рассчитанную на основе 2-секундного сегмента данных. Обратите внимание, что выбор функции был применен только в иллюстративных целях. Для ЭКГ ФЖ крысы на рис. 7А большинство сегментов из организованного класса попали в один кластер, отделенный от двух кластеров неорганизованных признаков. У Крысы-7 продолжительность ФЖ короче, что приводит к гораздо меньшему количеству доступных сегментов, чем у других крыс.Таким образом, короткий сегмент ЭКГ может не отражать в полной мере фибрилляторную характеристику, что может быть причиной его неправильной классификации с высокой P w = 100%.
Рисунок 7 . Распределение признаков относительно фибриллярного организационного уровня. Были построены три лучших признака, отобранных по взаимной информации. Цвет признаков соответствует значениям CPI, за исключением признаков субъекта Clinical-10, выделенных красным цветом.В целом функции с высоким и низким CPI разделены. Тем не менее, признаки субъекта клинического-10 с высоким CPI (в красных треугольниках), как правило, перекрываются с признаками из группы с низким CPI. (A) Характеристики Rat VF. (B) Клинические признаки ФП.
На рис. 7В показаны особенности клинической ЭКГ ФП, которые сформировали больше субкластеров. Цвет признаков соответствует значениям CPI, за исключением признаков клинического субъекта-10, выделенных красным, поскольку клинический-10 является единственным организованным субъектом, который классифицируется как неорганизованный.Как правило, объекты с самым высоким и самым низким CPI, как правило, были отделены друг от друга, в то время как объекты с промежуточным CPI, как правило, больше перекрывались. Clinical-10 имеет CPI 0,22 и выявлен стабильный RD, однако черты этого субъекта, как правило, ближе к признакам дезорганизованного класса, что могло быть причиной неправильной классификации. Clinical-9 имеет CPI 0,15 и был помечен как дезорганизованный, поскольку у этого субъекта не обнаружено РЗ. Причиной неправильной классификации субъекта может быть то, что ИПЦ очень близок к среднему ИПЦ, который используется для бинарного разделения данных на две группы.
На рисунках 8A, B показаны примеры сегментов ЭКГ ФЖ крыс из организованных и дезорганизованных классов на основе фазового картирования. На рисунках 8C–F показаны примеры сегментов клинической ФП ЭКГ I отведения с соответствующим CPI. Как правило, не существует четких морфологических закономерностей, связанных с уровнем ИПЦ, и, следовательно, трудно определить уровень организации данного сегмента данных только с помощью визуальной оценки.
Рис. 8. (A,B) показывают примеры организованной и неорганизованной ЭКГ ФЖ крыс. (C–F) показаны примеры клинической ЭКГ ФП с различными уровнями CPI, рассчитанными на основе соответствующих данных ЭГМ. Как для крыс, так и для клинических данных трудно различить организованные и неорганизованные данные только с помощью визуальной оценки.
5. Обсуждение
Экспериментальные результаты показали, что предложенные методы классификации позволяют дифференцировать фибрилляции разного уровня организации по поверхностной ЭКГ с точностью 78% по данным ФЖ крыс и с точностью 88% по клиническим данным ФП.Основываясь на результатах, этот метод может неинвазивно определить степень организации, чтобы помочь принять решение о лечении пациентов с ФП и выживших после ФЖ.
Понятие «организация» в рамках ФП не полностью установлено или определено, отчасти из-за ограниченного понимания лежащих в основе механизмов. Степень сложности ФП ранее анализировалась как локальным, так и мультисайтовым анализом ЭГМ во временной и частотной областях (Ravelli and Masè, 2014).Некоторые группы пытались проанализировать повторяющийся характер волновых фронтов при ФП с использованием таких методов, как индекс сходства (Ravelli et al., 2005) и ретро-картирование (Mann et al., 2019). Эти методы требуют анализа внутрисердечной электрограммы из инвазивного картирования. Ланквельд и др. (2014) ранее показали, что пространственно-временная организация ЭКГ с ФП, измеренная с помощью таких методов, как сложность F-зубца, гармонический спад и анализ DF, может отличить пароксизмальную ФП от более дезорганизованной персистирующей ФП (Lankveld et al., 2014). Кроме того, было показано, что эти параметры сложности ФП, полученные из поверхностных ЭКГ, могут прогнозировать исходы процедур катетерной аблации у пациентов с персистирующей ФП при длительном наблюдении (Lankveld et al., 2016). Предлагаемая в этом исследовании методология для характеристики сложности фибрилляции по ЭКГ имеет силу как неинвазивности, так и проверки с подробными исследованиями оптического картирования при ФЖ крыс. Бинарная классификация ЭКГ ФП как организованная и неорганизованная в отношении описания вероятного лежащего в ее основе механизма может быть полезна при выборе соответствующих стратегий лечения пациентов.Пациенты с дезорганизованной ФП, вероятно, лучше подходят для лечения антиаритмическими препаратами или обширной компартментализации предсердий с хирургическим доступом, в то время как пациентам с организованной ФП может помочь катетерная аблация.
5.1. Влияние высокочастотных компонентов
Это исследование показывает, что мощность частотных диапазонов относительно более высоких частот отрицательно коррелирует с уровнем организации, что согласуется с существующими исследованиями, согласно которым организованная AF имеет тенденцию иметь более низкую DF (Lankveld et al., 2016).
На рисунке 9 сравнивались отфильтрованные сигналы (нормированные по общей мощности), соответствующие полосам 25~50 Гц (т.е. высокочастотные составляющие) от одного организованного и одного неорганизованного испытуемых, и видно, что мощность этих высокочастотных Компоненты у неорганизованного субъекта были постоянно выше, чем у организованного, хотя высокочастотные компоненты (> 25 Гц) составляют относительно небольшую часть всего спектра сигнала, они могут быть полезны для различения организованной ФП от дезорганизованной.
Рисунок 9 . Сравнение отфильтрованных сигналов в полосе 25~50 Гц от одного организованного и одного неорганизованного субъектов (клинический набор данных ФП).
Данные оптического картирования и записи ЭГМ можно рассматривать как источники, а поверхностную ЭКГ можно рассматривать как линейную смесь источников из-за эффекта объемной проводимости. Организованная фибрилляция, вызванная одним или двумя стабильными RD, имеет тенденцию к активации с последовательными и синхронизированными паттернами активации, что приводит к спектральной плотности мощности (PSD) ЭКГ, концентрирующейся на нескольких низкочастотных компонентах.Когда фибрилляция хаотична со случайно распространяющимися волновыми фронтами, исходные сигналы имеют тенденцию быть более фрагментированными, что приводит к поверхностной ЭКГ с более высокочастотными компонентами.
Также стоит отметить, что временные морфологические характеристики сигналов ЭКГ являются лишь одним из аспектов различий, подразумеваемых характеристиками мощности полосы высоких частот между организованными и неорганизованными классами. Значимые связи между мощностью высокочастотного диапазона и уровнем организации были обнаружены только для определенных отведений.Только использование признаков со значительными корреляциями дало точность классификации на уровне вероятности. Более того, использование признаков всех 12 отведений, но только одного диапазона, 25~50 Гц или 50~100 Гц, также дало точность около 60%. Ни одна полоса, ни одно отведение не могут полностью отразить различия исходных паттернов между организованными и неорганизованными субъектами. Различные модели пространственной дисперсии по 12 отведениям разных частотных диапазонов являются ключом к различению организованных и неорганизованных классов.=argminw𝔼[(w⊤xo(t))2]𝔼[(w⊤xd(t))2] (11)
, где w∈R12 — весовые коэффициенты канала, а x o ( t ) и x d ( t ) — вектор пройденного сигнала ЭКГ во времени t организованных и неорганизованных классов соответственно. w⊤xo(t)(w⊤xd(t)) можно рассматривать как один виртуальный канал, а 𝔼[(w⊤xo(t))2] и 𝔼[(w⊤xd(t))2] обозначают ожидание БП единого виртуального канала для организованных и неорганизованных классов соответственно.Решив (уравнение 11), можно оптимизировать веса свинца таким образом, чтобы w максимизировало разницу между BP организованного и неорганизованного классов. Мы применили (уравнение 11) к каждой полосе и использовали полосу пропускания одного виртуального канала в качестве признака. Этот подход оценивался тем же способом LOO. Однако оптимизация опережения на основе уравнения (11) не так хороша, как при использовании взаимной информации для выбора признаков, возможно, из-за переобучения. Выбор лидов, дающих функции BP с наивысшей взаимной информацией, означает, что веса лидов могут быть либо 0, либо 1.Этот процесс включает в себя меньше параметров, которые необходимо настроить в качестве решения (уравнение 11), и, следовательно, он более устойчив к несходствам между субъектами в одном и том же классе.
5.3. Ограничения
Ограничением этого исследования является то, что данные картирования ФП представляли собой данные последовательно полученных внутрисердечных ЭГМ с низким разрешением, которые использовались для обозначения основного механизма, а данные последующего наблюдения были недоступны. Таким образом, основная истина для уровня организации не могла быть определена напрямую и должна была быть выведена из анализа GC.ГХ-анализ внутрисердечной электрограммы у пациентов с ФП проводился по методике, разработанной на основе анализа оптического картирования ФЖ крыс. На исходы, измеренные при ФП в этом исследовании, могли повлиять разрешение картирования, расстояние между электродами, стабильность катетера и неоднородность картирования. Значение CPI для определения фибриллярной организации, применительно к невыбранной популяции, также могло зависеть от характеристик этой популяции.
Поскольку размер выборки клинических данных по ФП невелик, трудно сделать вывод об истинном распределении CPI клинической ФП.В этом исследовании мы объединили результаты обнаружения RD со медианным CPI для бинаризации данных. Для лучшей бинаризации в будущем исследовании потребуется более полный набор данных, например, включающий данные визуализации сердца пациентов и данные последующего наблюдения после аблации. Кроме того, в этом исследовании мы провели вычитание QRS, в то время как трудно полностью удалить зубцы Т, сохранив при этом неповрежденные сигналы фибрилляции. В нашем будущем исследовании мы будем искать лучшие подходы к обработке сигналов для извлечения сигнала фибрилляции.
6. Заключение
Для лечения фибрилляции миокарда необходимы индивидуализированные методы лечения, направленные на механизм, с лучшим отбором пациентов. Если механизм фибрилляции миокарда, в частности ФП, можно определить по поверхностной ЭКГ, пациенты могут быть подвергнуты неинвазивному скринингу для определения конкретных стратегий лечения, при этом только пациенты с глобально организованной фибрилляцией являются кандидатами на целенаправленную аблацию драйверов, а пациенты с глобально дезорганизованной фибрилляцию лучше лечить антиаритмическими препаратами или стратегиями аблации для отделения предсердий.В этом исследовании мы предлагаем классификационную основу для определения уровня организации фибрилляции и, таким образом, основного механизма фибрилляции (стабильная РД по сравнению с несколькими вейвлетами) только по ЭКГ, без необходимости инвазивной внутрисердечной записи.
Экспериментальные результаты данного исследования показали, что предложенные методы классификации позволяют дифференцировать фибрилляции разных типов организации: для ЭКГ ФЖ крысы чувствительность, специфичность и точность составляют 75, 80 и 78% соответственно; и когда эти методологии были адаптированы для клинической ЭКГ с ФП, чувствительность, специфичность и точность составляют 80, 92 и 88% соответственно.Таким образом, предложенные в этом исследовании методы потенциально могут определить механизмы фибрилляции и могут помочь в неинвазивной адаптации методов лечения пациентов с ФП и выживших после ФЖ.
Заявление о доступности данных
Необработанные данные, подтверждающие выводы этой статьи, будут предоставлены авторами без неоправданных оговорок.
Заявление об этике
Исследования с участием людей были рассмотрены и одобрены Местным комитетом по этике исследований (Бромли).Пациенты/участники предоставили письменное информированное согласие на участие в этом исследовании. Исследование на животных было рассмотрено и одобрено Советом по этике Имперского колледжа Лондона.
Вклад авторов
XL и FN: концепция. XL, BH, NQ, ZW, NL, PL, PK, NP и FN: сбор данных. XL, BH и BZ: анализ данных. XL, XS, BH, AS и FN: черновая статья. Все авторы: критическая доработка статьи и окончательное утверждение.
Финансирование
Эта работа была поддержана Британским кардиологическим фондом (RG/16/3/32175) и Национальным институтом исследований в области здравоохранения (NIHR), Имперским центром биомедицинских исследований.
Конфликт интересов
FN, BH, XL и NP являются изобретателями патентной заявки на картирование причинно-следственной связи по Грейнджеру.
Остальные авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Примечание издателя
Все претензии, изложенные в этой статье, принадлежат исключительно авторам и не обязательно представляют претензии их дочерних организаций или издателя, редакторов и рецензентов.Любой продукт, который может быть оценен в этой статье, или претензии, которые могут быть сделаны его производителем, не гарантируются и не поддерживаются издателем.
Ссылки
Ахмад, А., Салинет, Дж. Л. мл., Браун, П., Туан, Дж. Х., Стаффорд, П., Нг, Г. А., и Шлиндвайн, Ф. С. (2011). Вычитание Qrs для предсердных электрограмм: плоская, линейная и сплайн-интерполяции. Мед. Биол. англ. Вычисление . 49, 1321–1328. doi: 10.1007/s11517-011-0829-9
Реферат PubMed | CrossRef Полный текст | Google Scholar
Алкаин, А., Масе М., Кристофоретти А., Равелли Ф., Нолло Г., Лагуна П. и др. (2017). Многовариантная структура предсказуемости для оценки инвазивной сердечной деятельности и взаимодействий во время фибрилляции предсердий. IEEE Trans. Биомед. Eng . 64, 1157–1168. doi: 10.1109/TBME.2016.2592953
Реферат PubMed | CrossRef Полный текст | Google Scholar
Алькарас, Р., и Риета, Дж. Дж. (2012). Применение энтропии вейвлета для прогнозирования прогрессирования мерцательной аритмии по поверхностной ЭКГ. Comput Math Methods Med, стр. 245213. doi: 10.1155/2012/245213
Реферат PubMed | CrossRef Полный текст | Google Scholar
Анг, К. К., Чин, З. Ю., Ван, К., Гуань, К., и Чжан, Х. (2012). Алгоритм общего пространственного шаблона банка фильтров для наборов данных 2a и 2b соревнования BCI IV. Фронт. Нейроски . 6:39. doi: 10.3389/fnins.2012.00039
Реферат PubMed | CrossRef Полный текст | Google Scholar
Арнольд А., Лю Ю. и Абэ Н.(2007). «Временное причинно-следственное моделирование с графическими методами грейнджера», в Трудах 13-й Международной конференции ACM SIGKDD по обнаружению знаний и интеллектуальному анализу данных, KDD ’07 Сан-Хосе, Калифорния.
Google Scholar
Аттиа, З. И., Носеворти, П. А., Лопес-Хименес, Ф., Асирватхам, С. Дж., Дешмукх, А. Дж., Герш, Б. Дж., и соавт. (2019). Алгоритм ЭКГ с искусственным интеллектом для выявления пациентов с фибрилляцией предсердий во время синусового ритма: ретроспективный анализ прогнозирования исхода. Ланцет 394, 861–867. doi: 10.1016/S0140-6736(19)31721-0
Реферат PubMed | CrossRef Полный текст | Google Scholar
Боллманн, А., Хуссер, Д., Майнарди, Л., Ломбарди, Ф., Лэнгли, П., Мюррей, А., и соавт. (2006). Анализ поверхностных электрокардиограмм при мерцательной аритмии: методы, исследования и клиническое применение. Европас 8, 911–926. doi: 10.1093/europace/eul113
Реферат PubMed | CrossRef Полный текст | Google Scholar
Ченг, Д., Бахадори, М.Т., и Лю, Ю. (2014). «Fblg: простой и эффективный подход к обнаружению временных зависимостей из данных временных рядов», в KDD ’14: Труды 20-й Международной конференции ACM SIGKDD по обнаружению знаний и интеллектуальному анализу данных (Нью-Йорк, штат Нью-Йорк), 382–391.
Google Scholar
де Гроот, Н., ван дер Доус, Л., Лантерс, Э., Теувен, К., Нопс, П., ван де Воестийн, П., и др. (2016). Прямое доказательство эндоэпикардиальной асинхронии стенки предсердий при фибрилляции предсердий у человека. Обр. Аритм. Электрофизиол . 9, 1–7. doi: 10.1161/CIRCEP.115.003648
Реферат PubMed | CrossRef Полный текст | Google Scholar
Фан, X., Яо, К., Цай, Ю., Мяо, Ф., Сунь, Ф., и Ли, Ю. (2018). Многомасштабное слияние глубоких сверточных нейронных сетей для скрининга мерцательной аритмии по коротким записям ЭКГ в одном отведении. IEEE J. Biomed. Здравоохранение Информ . 22, 1744–1753 гг. дои: 10.1109/JBHI.2018.2858789
Реферат PubMed | CrossRef Полный текст | Google Scholar
Ханда, Б.С., Ли, Х., Баксан, Н., Рони, С.Х., Щендрыгина, А., Мэнсфилд, С.А., и соавт. (2021). Механизм фибрилляции желудочков и глобальная организация фибрилляции определяются соединением щелевых контактов и характером фиброза. Кардиовасц. Рез . 117, 1078–1090. doi: 10.1093/cvr/cvaa141
Реферат PubMed | CrossRef Полный текст | Google Scholar
Ханда Б.С., Ли Х., Куреши Н., Манн И., Чоудхури Р.А., Канагаратнам П. и др. (2020). Причинно-следственный анализ по Грейнджеру для классификации механизмов фибрилляции и локализации вращательных драйверов. Обр. Аритм. Электрофизиол . 13:e008237. doi: 10.1161/CIRCEP.119.008237
Реферат PubMed | CrossRef Полный текст | Google Scholar
Ханда, Б.С., Рони, С.Х., Хьюстон, К., Куреши, Н.А., Ли, X., Питчер, Д.С., и соавт. (2018). Аналитические подходы к сигналам фибрилляции миокарда. Вычисл. Биол. Мед . 102, 315–326. doi: 10.1016/j.compbiomed.2018.07.008
Реферат PubMed | CrossRef Полный текст | Google Scholar
Круммен, Д.Э., Хо, Г., Виллонгко, К.Т., Хаясе, Дж., и Шрикер, А.А. (2016). Фибрилляция желудочков: триггеры, механизмы и методы лечения. Кардиол будущего . 12, 373–390. doi: 10.2217/fca-2016-0001
Реферат PubMed | CrossRef Полный текст | Google Scholar
Ланквельд Т., Зеемеринг С., Крейн Х. и Шоттен У. (2014). ЭКГ как инструмент для определения сложности мерцательной аритмии. Сердце 100, 1077–1084. doi: 10.1136/heartjnl-2013-305149
Реферат PubMed | CrossRef Полный текст | Google Scholar
Ланквельд, Т., Зеемеринг С., Шерр Д., Куклик П., Хоффманн Б., Виллемс С. и соавт. (2016). Параметры сложности мерцательной аритмии, полученные из поверхностных ЭКГ, позволяют прогнозировать исход процедуры и долгосрочное наблюдение поэтапной катетерной аблации мерцательной аритмии. Обр. Аритмия. Электрофизиол . 9, e003354. doi: 10.1161/CIRCEP.115.003354
Реферат PubMed | CrossRef Полный текст | Google Scholar
Лафнер Дж. И., Нг Ф. С., Сулкин М. С., Артур Р. М. и Ефимов И.Р. (2012). Обработка и анализ данных оптического картирования сердца, полученных с помощью потенциометрических красителей. утра. J. Physiol. Heart Circ. Физиол . 303, Н753–765. doi: 10.1152/ajpheart.00404.2012
Реферат PubMed | CrossRef Полный текст | Google Scholar
Ли, С., Сахадеван, Дж., Хрестян, К.М., Какулев, И., Марковиц, А., и Уолдо, А.Л. (2015). Одновременное биатриальное высокоплотное (510-512 электродов) эпикардиальное картирование персистирующей и длительно персистирующей фибрилляции предсердий у пациентов. Обр. Аритмия. Электрофизиол . 132, 2108–2117. doi: 10.1161/РАСПИСАНИЕAHA.115.017007
Реферат PubMed | CrossRef Полный текст | Google Scholar
Li, X., Roney, C.H., Handa, B.S., Chowdhury, R.A., Niederer, S.A., Peters, N.S., et al. (2019). Стандартизированная основа для количественного анализа динамики фибрилляции. науч. Реп . 9, 16671. doi: 10.1038/s41598-019-52976-y
Реферат PubMed | CrossRef Полный текст | Google Scholar
Лин, К.-ЧАС. (2008). Особенности частотной области для распознавания ритмов ЭКГ с использованием классификатора на основе реляционного анализа Грея. Вычисл. Мат. Заявка . 55, 680–690. дои: 10.1016/j.camwa.2007.04.035
CrossRef Полный текст | Google Scholar
Луенго, Д., Муньос, Г.Р.Р., Эльвира, В., и Артес-Родригес, А. (2016). «Иерархический алгоритм обнаружения причинно-следственной связи среди электрограмм мерцательной аритмии», в 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) (Shanghai: IEEE), 774–778.
Google Scholar
Луенго, Д., Муньос, Г.Р.Р., Эльвира, В., Санчес, К., и Артес-Родригес, А. (2018). Иерархические алгоритмы поиска причинно-следственной связи во внутриполостных электрограммах мерцательной аритмии. IEEE J. Biomed. Здравоохранение Информ . 23, 143–155. дои: 10.1109/JBHI.2018.2805773
Реферат PubMed | CrossRef Полный текст | Google Scholar
Манн, И., Койл, К., Куреши, Н., Надь, С.З., Коа-Винг, М., Лим, П.Б., и соавт. (2019). Оценка нового алгоритма отслеживания активации при мерцательной аритмии с использованием мультиполярных катетеров у людей. Дж. Кардиовасц. Электрофизиол . 30, 1464–1474. doi: 10.1111/jce.14033
Реферат PubMed | CrossRef Полный текст | Google Scholar
Мартин-Йебра, А., Лагуна, П., Цыганкевич, И., Байес-де-Луна, А., Кайани, Э. Г., и Мартинес, Дж. П. (2019). Количественная оценка изменения реполяризации желудочков для стратификации риска внезапной сердечной смерти при мерцательной аритмии. IEEE J. Biomed. Здравоохранение Информ . 23, 1049–1057. дои: 10.1109/JBHI.2018.2851299
Реферат PubMed | CrossRef Полный текст | Google Scholar
Мео, М., Зарзосо, В., Месте, О., Латку, Д.Г., и Сауди, Н. (2013). Пространственная вариабельность поверхностной ЭКГ в 12 отведениях как инструмент неинвазивного прогнозирования исхода катетерной аблации при персистирующей фибрилляции предсердий. IEEE Trans. Биомед. Eng . 60, 20–27. doi: 10.1109/TBME.2012.2220639
Реферат PubMed | CrossRef Полный текст | Google Scholar
Морилло, К.А., Банерджи, А., Перель, П., Вуд, Д., и Жувен, X. (2017). Мерцательная аритмия: современная эпидемия. j гериатр кардиол. J Гериатр. Кардиол . 14, 195–203. doi: 10.11909/j.issn.1671-5411.2017.03.011
Реферат PubMed | CrossRef Полный текст | Google Scholar
Наттел С., Сюн Ф. и Агилар М. (2017). Демистификация роторов и их место в клинической интерпретации механизмов фибрилляции предсердий. Нац. Преподобный Кардиол . 14, 509–520. doi: 10.1038/nrcardio.2017.37
Реферат PubMed | CrossRef Полный текст | Google Scholar
Нг, Ф. С., Ханда, Б. С., Ли, X., и Питерс, Н. С. (2020). К механизированному лечению мерцательной аритмии на основе электрофенотипа. Фронт. Физиол . 11:987. doi: 10.3389/fphys.2020.00987
Реферат PubMed | CrossRef Полный текст | Google Scholar
Ng, F.S., Kalindjian, J.M., Cooper, S.A., Chowdhury, R.A., Patel, P.M., Dupont, E., et al. (2016). Усиление функции щелевых контактов во время острого инфаркта миокарда модифицирует заживление и снижает предрасположенность к поздним желудочковым аритмиям. JACC клин. Электрофизиол . 2, 574–582. doi: 10.1016/j.jacep.2016.03.007
Реферат PubMed | CrossRef Полный текст | Google Scholar
Нг, Ф.С., Шади, И.Т., Петерс, Н.С., и Лайон, А.Р. (2013). Селективное снижение частоты сердечных сокращений с помощью ивабрадина замедляет вызванные ишемией электрофизиологические изменения и уменьшает частоту желудочковых аритмий, вызванных ишемией-реперфузией. Дж. Мол. Сотовый Кардиол . 59, 67–75. doi: 10.1016/j.yjmcc.2013.02.001
Реферат PubMed | CrossRef Полный текст | Google Scholar
Равелли, Ф., Faes, L., Sandrini, L., Gaita, F., Antolini, R., Scaglione, M., et al. (2005). Картирование подобия волн показывает пространственно-временное распределение сложности фибриллярных волн в правом предсердии человека во время пароксизмальной и хронической фибрилляции предсердий. Дж. Кардиовасц. Электрофизиол . 16, 1071–1076. doi: 10.1111/j.1540-8167.2005.50008.x
Реферат PubMed | CrossRef Полный текст | Google Scholar
Равелли, Ф., и Масе, М. (2014). Компьютерное картирование при мерцательной аритмии: как интеграция карт, полученных из сигналов, может помочь в локализации критических источников. Европас 16, 714–723. doi: 10.1093/europace/eut376
Реферат PubMed | CrossRef Полный текст | Google Scholar
Родриго М., Климент А. М., Либерос А., Кальво Д., Фернандес-Авилес Д., Беренфельд О. и др. (2016). Выявление доминирующих паттернов возбуждения и источников мерцательной аритмии путем анализа причинно-следственных связей. Энн. Биомед. Eng . 44, 2364–2376. doi: 10.1007/s10439-015-1534-x
Реферат PubMed | CrossRef Полный текст | Google Scholar
Рони, К.H., Cantwell, C.D., Bayer, J.D., Qureshi, N.A., Lim, P.B., Tweedy, J.H., et al. (2017). Требования к пространственному разрешению для точной идентификации драйверов мерцательной аритмии. Обр. Аритмия. Электрофизиол . 10, e004899. doi: 10.1161/CIRCEP.116.004899
Реферат PubMed | CrossRef Полный текст | Google Scholar
Сау, А., Ховард, Дж. П., Аль-Айдарус, С., Феррейра-Мартинс, Дж., Аль-Хаятт, Б., Лим, П. Б., и др. (2019). Метаанализ рандомизированных контролируемых исследований аблации мерцательной аритмии с изоляцией легочных вен по сравнению с отсутствием. JACC клин. Электрофизиол . 5, 968–976. doi: 10.1016/j.jacep.2019.05.012
Реферат PubMed | CrossRef Полный текст | Google Scholar
Шрайбер, Д., Росток, Т., М., М.Ф., Султан, А., Серватиус, Х., Хоффманн, Б.А., и соавт. (2015). Пятилетнее наблюдение после катетерной аблации персистирующей фибрилляции предсердий с использованием поэтапного подхода и прогностических факторов успеха. Обр. Аритмия. Электрофизиол . 8, 308–317. doi: 10.1161/CIRCEP.114.001672
Реферат PubMed | CrossRef Полный текст | Google Scholar
Песня, С.и Бикель, П.Дж. (2011). Большие векторные авторегрессии. архив 1–28.
Google Scholar
Уэтаке С., Мияучи Ю., Осака М., Хаяши М., Ивасаки Ю., Йодогава К. и др. (2014). Частотный анализ поверхностных электрокардиограмм (ЭКГ) у пациентов с персистирующей фибрилляцией предсердий: корреляция с внутрисердечными ЭКГ и значение для радиочастотной катетерной аблации. Дж. Аритмия . 30, 453–459. doi: 10.1016/j.joa.2013.12.003
CrossRef Полный текст | Google Scholar
Вальдес-Соса, П.А., Санчес-Борно, Дж. М., Лаге-Кастельянос, А., Вега-Эрнандес, М., Бош-Баярд, Дж., Мели-Гарсия, Л., и др. (2005). Оценка функциональной связи мозга с разреженной многомерной авторегрессией. Филос. Транс. Р. Соц. Лонд . 360, 969–981. doi: 10.1098/rstb.2005.1654
Реферат PubMed | CrossRef Полный текст | Google Scholar
Чжэн, З. Дж., Крофт, Дж. Б., Джайлз, У. Х., и Менса, Г. А. (2001). Внезапная сердечная смерть в США, 1989–1998 гг. Circulation 104, 2158–2163.дои: 10.1161/hc4301.098254
Реферат PubMed | CrossRef Полный текст | Google Scholar
А. Приложение
Значение круговой взаимозависимости для идентификации RD было подтверждено данными оптического картирования модели ФЖ крысы. На рисунке A1 показан пример данных оптического картирования с понижением частоты дискретизации. На (рис. 6А) фон представляет собой основную истину вращательной активности, полученную с помощью фазового картирования в виде тепловой карты, значение которой представляет собой процент времени, в течение которого вращательная деятельность остается в данном месте.В частности, красная горячая точка имеет значение около 10%, что составляет около 350 мс, учитывая, что общая продолжительность этой записи составляет 4 с. DF данных крыс VF обычно колеблется от 20 до 30 Гц. Таким образом, активность вращения в красной горячей точке будет примерно в 18 раз больше оборотов, что делает ее относительно очень стабильной RD-площадкой. Исходные данные оптического картографирования были подвергнуты понижающей дискретизации в виде сетки 4 на 4 с 1/4 исходного разрешения. Каждое сердце крысы будет генерировать примерно 75 областей с уменьшенной выборкой.
Рисунок A1. (A) показывает пониженную дискретизацию данных оптического картирования с высоким разрешением крысиной ФЖ. Области 1 и 2 были помечены в соответствии с тепловой картой RD (RD), показанной в качестве фона, локальные векторные карты GC которых были показаны в (B) и (C) соответственно. (D) показывает ROC предсказания RD с использованием CIV.
Два примера локальной карты GC после субдискретизации показаны на (рис. 6B, C), а области 1 и 2 были помечены как класс RD и не-RD соответственно в соответствии с тепловой картой на (рис. 6A).CIV для области 1 намного выше (0,83), чем для области 2 (0,27). Прогноз RD для всех областей с пониженной дискретизацией с использованием CIV дал кривую рабочих характеристик приемника (ROC), показанную на (рис. 6D), с площадью под кривой (AUC) 0,87 и наилучшей рабочей точкой 0,60.
Университет Сент-Эндрюс онлайн — традиционно отличается
Политика классификации
Политика прощения
Любой учащийся может пересдать не более двух курсов (каждый по одному разу), чтобы добиться эффективного мастерства в этой области.После завершения учащийся может запросить списание оценок через офис регистратора. Предыдущий список курсов останется в стенограмме, но оценка изменится на «R»; таким образом, он не будет учитываться в итоговом среднем балле. Новая оценка, полученная в результате повторения курса, будет указана в стенограмме и будет использоваться для расчета окончательного среднего балла. если он выше или равен прощенной степени. Если новая оценка ниже, чем первая, обе оценки останутся в стенограмме и обе будут пересчитаны в G.П.А. но только один из двух будет засчитан для окончания учебы.
Система оценок
| ОЦЕНКА | ЭКВИВАЛЕНТ | ДИАПАЗОН | БАЛЛЫ КАЧЕСТВА |
|---|---|---|---|
| А | Отлично | 90–100 | 4 балла |
| B | Хорошо | 80-89 | 3 балла |
| C | Средний | 70-79 | 2 балла |
| D | Бедных | 60-69 | 1 балл |
| Ф | Отказ | 0–59 | 0 баллов |
I-A оценка «I» (незавершенный) запрашивается студентом, когда он не может завершить курс из-за уважительных обстоятельств, таких как выполнение работы или сдача экзамена.Инструктор должен согласиться с неполным. Студент должен заполнить неполную форму запроса и оплатить сбор в размере 25 долларов США в бизнес-офисе. Неполная оценка должна быть удалена до 1 октября для предыдущего весеннего или летнего семестра, до 1 февраля для предыдущего осеннего семестра, иначе она вернется к «F».
Класс IP-A «IP» (в процессе) будет присвоен курсу (только для стажировки), который все еще продолжается.Оценка IP должна быть удалена к концу осеннего семестра, если студент имеет IP в летнем семестре, к концу весеннего семестра, если студент имеет IP в осеннем семестре, и к концу летнего семестра, если студент студент имеет IP в весеннем семестре, иначе он вернется к «F».
Присвоена оценка R-A, которая указывает на то, что попытка кредита была неприемлемой. Оценка за повторную сдачу не приносит баллов и не учитывается в среднем балле.«R» также указывается, когда курс был повторен, и студент применил политику прощения.
W-Withdrawal указывается в итоговом аттестационном листе, если учащийся выбыл из класса в течение назначенного периода отказа, заполнил необходимые документы и оплатил требуемую плату. Оценка не рассчитывается по среднему баллу.
Оценка P-A, присваиваемая за переведенный зачет или зачет по результатам экзамена.Оценочные баллы не присваиваются, но зарабатываются часы, необходимые для получения степени.
WP/WF-Withdraw Passing и Withdrawal Fail могут быть указаны в окончательной оценочной ведомости, если назначенный период отказа закончился и ТОЛЬКО по усмотрению инструктора. Допускается не более двух (2) неудовлетворительных оценок по программе бакалавриата и не более одной (1) по программе младшего специалиста.Оценка WP/WF не рассчитывается в среднем балле.
Средний балл вычисляется, как показано в следующем примере:
| Курс | Кредитные часы | Оценка | Значение оценочного балла | Заработанные кредитные часы | Всего баллов качества |
|---|---|---|---|---|---|
| ENG111 | 3 | C | 2 | 3 | 6 |
| СНГ101 | 3 | D | 1 | 3 | 3 |
| МАТ121 | 3 | Ф | 0 | 0 | 0 |
| БИО101 | 3 | B | 3 | 3 | 9 |
| МГТ250 | 3 | А | 4 | 3 | 13 |
| 12 | 30 |
30 разделить на 15 = 2.00 Средний балл
настроений в социальных сетях, сложности портфеля и доходности акций, Вун Сау Леунг, Габриэль Вонг, Вун К. Вонг :: SSRN
73 страницы
Опубликовано: 13 декабря 2019 г.
Последняя редакция: 17 июня 2020 г.
Просмотреть все статьи Вун Сау Леунга
Школа бизнеса Эдинбургского университета, Эдинбургский университет
Университет Кардиффа — Школа бизнеса Кардиффа
IMRU, Школа бизнеса Кардиффа
Дата написания: 24 ноября 2019 г.
Аннотация
Используя твиты StockTwits и методы классификации машинного обучения, мы обнаружили, что настроения в социальных сетях предсказывают позитивную и значительную будущую доходность акций, и, что важно, такая положительная предсказуемость уменьшается, когда число пользователей, отслеживающих акции, увеличивается.Предсказуемость возврата, по-видимому, связана со способностью пользователей прогнозировать будущие доходы. Дальнейшие тесты показывают, что снижение предсказуемости из-за покрытия запасов значимо только для фирм, которые являются сложными, непрозрачными и, следовательно, трудно анализируемыми. Данные свидетельствуют о том, что анализ акций пользователями с более сложным портфелем уступает из-за ограниченности внимания и времени.
Ключевые слова: Настроения в социальных сетях, StockTwits, Поведенческие финансы, Ограниченное внимание, Доходность акций
Классификация JEL: G11, G12, G41
Рекомендуемое цитирование:
Рекомендуемая ссылка
Скрининг тревожности и депрессии у моряков с помощью технологии машинного обучения
https://doi.org/10.1016/j.imu.2019.100228
Основные моменты
- •
Тревога и депрессия являются двумя наиболее серьезными психическими расстройствами среди моряков.
- •
Психические расстройства часто остаются недиагностированными из-за нехватки квалифицированных врачей и времени.
- •
Технология машинного обучения может эффективно применяться в качестве инструмента скрининга для выявления тревоги и/или депрессии.
- •
В качестве предикторов тревоги и/или депрессии были определены различные социально-демографические факторы и сопутствующие заболевания.
Abstract
ОБЩИЕ СВЕДЕНИЯ
Моряки подвержены различным психическим расстройствам, чаще всего тревоге и депрессии. Поэтому периодический скрининг на тревогу и депрессию необходим для их здоровья и благополучия. Технология машинного обучения может быть полезна в качестве быстрой автоматизированной процедуры проверки для выявления моряков из группы риска для раннего направления на психологическое консультирование и лечение.
Задачи
Сравнить эффективность алгоритмов машинного обучения для скрининга тревоги и депрессии среди моряков.
Методы
В общей сложности 470 моряков были опрошены в доковом комплексе Халдия, Индия, после получения необходимых разрешений и одобрения этических норм. Была собрана различная социально-демографическая, профессиональная и связанная со здоровьем информация. Затем по Госпитальной шкале тревоги и депрессии оценивали наличие тревоги и депрессии. Пять классификаторов машинного обучения, т. е. CatBoost, логистическая регрессия, наивный байесовский алгоритм, случайный лес и машина опорных векторов, были оценены с использованием языка программирования Python.
Результат
CatBoost оказался наиболее подходящей мерой для этой цели с точностью 82,6% и 84,1% соответственно.
Заключение
В этом исследовании особое внимание уделяется применению технологии машинного обучения в области автоматизированного скрининга психических заболеваний. Используя эту технологию, ручная и трудоемкая процедура скрининга тревоги и депрессии может быть заменена автоматизированным компьютерным методом анализа со степенью точности, достаточной для целей скрининга.
Ключевые слова
Ключевые слова
Технологии
технологии обучения
Случайные леса
логистические регрессии
Catboost
Seafarers
Рекомендуемые статьи со статей очки (0)
© 2019 Опубликовано
© 2019 Опубликовано в Elsevier Ltd.
Рекомендуемые статьи
Со ссылкой на статьи
SAU лидирует в CIAA с 24 Национальными академическими лауреатами D2 ADA
SAU возглавляет CIAA с 24 Национальными академическими лауреатами D2 ADA
SAU возглавляет CIAA с 24 Национальными академическими лауреатами D2 ADA
Департаментом спортивной информации Falcons
Роли, Северная Каролина (авг.23) – Отличные результаты в классе окупились для 24 студентов-спортсменов Университета Святого Августина, получивших в этом месяце награды за академические достижения от Ассоциации директоров по легкой атлетике Дивизиона 2 (D2 ADA).
The Falcons и Lady Falcons были среди 10 223 лауреатов, признанных 165 учреждениями в сезоне 2017-18 гг. Университет Святого Августина возглавил конференцию CIAA с наибольшим количеством лауреатов.
«Это то, чем занимается легкая атлетика Университета Святого Августина», — сказал спортивный директор SAU Джордж Уильямс.«Сначала учеба, потом спорт, и только потом контролируемая общественная жизнь».
Чтобы иметь право на эту награду, студент-спортсмен должен иметь не менее 3,5 совокупного среднего балла по шкале 4,0, завершить не менее двух лет (четырех семестров) работы в колледже на двухгодичном и/или четырехгодичном учебном заведении и был активным членом команды колледжа в сезоне 2017-18.
Ниже показаны Соколы и Леди Соколы, выделенные D2 ADA. Их вид спорта и классификация 2017-18 гг. Перечислены:
.
Лия Баркер (легкая атлетика/кросс-кантри, женщины) — старший
Флоренс Филдс (легкая атлетика/кросс-кантри, женщины) — второкурсник
Shakera Hall (легкая атлетика/волейбол, женщины) — Senior
Дуэйн Мюррей (мужская легкая атлетика / кросс-кантри) — второкурсник
Имани Принц-Гей (женщины, легкая атлетика/кросс-кантри) — юниоры
Магали Тшипопо (женщины, легкая атлетика/кросс-кантри) — старший
A’Lexus Wells (женщины, легкая атлетика/кросс-кантри) — юниоры
Элтон Браун (бейсбол) — второкурсник
Кильвио Гарсия (бейсбол) — старший
Джеффри Гусман (бейсбол) — старший
Гектор Пичардо (бейсбол) — старший
Амилкар Янез (бейсбол) — Юниор
Джейден Хендерсон (футбол) — второкурсник
Кэлвин Хикерсон (Футбол) — старший
Зак Дженкинс (Футбол) — Юниор
Марли Паркер (софтбол/волейбол) – старший
Элиза Рэй (волейбол) — старший
Хайли Петтифер (софтбол) — старший
Кейли Капрон (софтбол/боулинг) — второкурсник
Джеймс Томас Мур (гольф) — второкурсник
Хулио Кардосо (мужской баскетбол) — Юниоры
Отис Хилл-младший(мужской баскетбол) — второкурсник
Полетт Аддисон (женский баскетбол) — старший
Келси Арнольд (женский баскетбол) – Юниоры
Посетите сайт www.