
В чем разница между фиксирующим и удерживающим моментом?
Одна из особенностей шаговых двигателей, что отличает их от других типов, в частности серводвигателей — то, что они имеют удерживающий момент. Это означает, что, когда обмотки находятся под напряжением, а ротор в неподвижном состоянии, двигатель может удерживать нагрузку. Но шаговый двигатель может также удерживать нагрузку, когда нет тока, подаваемого на обмотки (например, в состоянии отключения питания). Это свойство известно как фиксирующий или остаточный момент.
Фиксирующий момент
Иначе говоря, фиксирующий момент формируется как сумма фиксирующих моментов, производимых двигателем, когда обмотки не под напряжением. Эффект фиксирующего момента может ощущаться при прокручивании вала двигателя вручную, в виде пульсаций вращающего момента или легких зацепок.
Из трех типов шаговых двигателей – с переменным магнитным сопротивлением, с постоянным магнитом и гибридных, только двигатели с переменным магнитным сопротивлением не проявляют фиксирующего момента. Это происходит из-за разницы в конструкции двигателей с переменным магнитным сопротивлением с постоянными магнитами и гибридных. Шаговые двигатели с постоянными магнитами и гибридные используют ротор с постоянными магнитами, который притягивается к полюсам статора даже тогда, когда нет питания на обмотках статора. В то же время, двигатели с переменным магнитным сопротивлением, используют пассивный (не намагниченный) ротор, изготовленный из магнитомягкого сплава. Таким образом, нет никакого притяжения между ротором и статором, когда обмотки статора не под напряжением. Гибридные шаговые двигатели, имеющие зубцы на поверхности ротора, способны лучше управлять магнитным потоком между статором и ротором, что придает им более высокие значения характеристик удержания, движения и фиксирующего момента, чем у шаговых двигателей с постоянными магнитами.
Зубцы по периметру гибридного шагового двигателя с ротором из постоянного магнита дают более высокие значения характеристик удержания, движения, и фиксирующего момента, чем другие типы шаговых двигателей.
Поскольку фиксирующий момент должен быть преодолен для того, чтобы мотор двигался, идеальный крутящий момент работающего двигателя уменьшается. Преодоление фиксирующего момента требует большей мощности двигателя. При этом величина необходимой дополнительной мощности пропорциональна скорости. Таким образом, чем быстрее вращается двигатель, тем большее влияние фиксирующий момент будет оказывать на фактический крутящий момент двигателя.
Фиксирующий момент снижает как идеальную мощность, так и крутящий момент, который идеальный двигатель может производить, с возрастанием этого эффекта по мере увеличения скорости.
С другой стороны, фиксирующий момент может быть полезным при остановке двигателя. Импульсу движущегося ротора противостоит фиксирующий момент и трение вращающихся компонентов. Таким образом, высокий фиксирующий момент способствует более быстрой остановке двигателя. Величина фиксирующего момента, как правило, находится в пределах 5 — 20% от величины удерживающего момента.
Удерживающий момент
Удерживающим моментом шагового двигателя является величина крутящего момента, необходимого для того, чтобы переместить двигатель на один полный шаг, когда обмотки под напряжением, а ротор находится в неподвижном состоянии. Удерживающий момент является одним из основных преимуществ, которые предлагают шаговые двигатели по сравнению с серводвигателями, и делает шаговые двигатели хорошим выбором для тех случаев, когда необходимо удерживать вал на месте при воздействии нагрузки.
Шаговый мотор может удерживать внешнее воздействие, когда двигатель находится в неподвижном состоянии.
Удерживающий момент, как правило, выше, чем крутящий момент, и ограничивается главным образом максимальным током, который двигатель может выдержать. С практической точки зрения, удерживающий момент является суммой магнитной силы, действующей со стороны катушки и удерживающей текущее положение двигателя, плюс фиксирующий момент. После начала движения крутящий момент на низких скоростях уравнивает удерживающий момент минус удвоенный фиксирующий момент (так как двигатель должен работать против фиксирующего момента).
Шаговый двигатель. Подбор и расчет шаговых двигателей для чпу
Шаговые электродвигатели можно встретить в устройстве автомобильных приборных панелей, принтеров, приводов CD-дисков, электрических инструментов, в общем – везде, где необходима повышенная точность позиционирования. Но наибольшую известность ШД получил в станках с ЧПУ.
Но почему этот механизм именуется именно так – «шаговый двигатель»? Если описывать его в двух словах, то он представляет собой бесщеточный синхронный мотор с несколькими проволочными обмотками. Электрический ток подается в одну из обмоток статора (неподвижного элемента) и таким образом фиксирует ротор (подвижную часть) в определенной позиции. Затем ток поступает в другую обмотку и ротор совершает новое движение. Такая последовательная смена позиции именуется «шаг». И именно благодаря этому принципу работы Шаговый Электродвигатель получил свое название.
Устройство и виды ШД
На сегодняшний день различают три основных типа шаговых двигателей:
Следует отметить, что микрошаг возможен только в гибридных ШД. Каждый микрошаг осуществляется посредством независимого управления обмотками. При помощи управления соотношением токов ротор может фиксироваться даже на промежуточном участке между двумя соседствующими шагами. Это повышает плавность вращения подвижного элемента и позволяет добиться оптимальной точности позиционирования. Количество шагов в этом режиме может достигать даже 51 200 за один оборот.
Многие любители задаются вопросом: почему выбрана именно зубчатая форма ротора? Ответ прост: в целях получения периодической зависимости обмотки статора от углового положения ротора. Зазор между пазами делается намного большим, чем между зубцами. Это позволяет обеспечить более низкую магнитную проводимость зазоров относительно удельной проводимости зубцов. В противном случае, шаговый двигатель просто не смог бы функционировать. Очевидно, что именно совокупность всех его конструктивных особенностей, а также форм и состава элементов позволяют ШД быть полноценным механизмом, а не просто куском металла.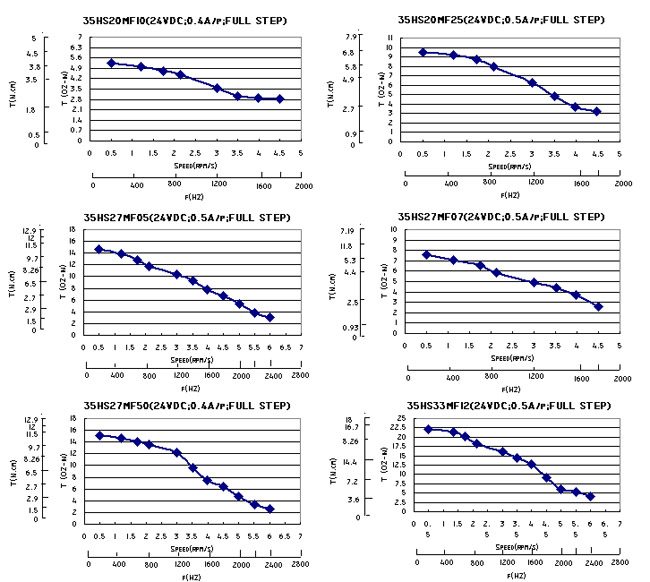
Кроме того, в зависимости от типа обмоток, ШД подразделяют на:
- биполярные
. Они обладают по одной обмотке для каждой фазы. Изменение направления магнитного поля в них обеспечивается посредством переплюсовки драйвером – двухполярным полумостовым или мостовым; - униполярные
. Такой шаговый двигатель также обладает по одной обмотке в каждой из фаз, но при этом от середины любой отдельной обмотки делается отвод. Таким образом направление поля можно менять посредством переключения используемой половинки обмотки. Драйвер должен содержать лишь четыре ключа, так что он проще, чем в биполярном моторе.
Характеристики ШД
В технической документации к шаговым двигателям вы можете встретить такой перечень характеристик:
- Крутящий момент или момент вращения
. Измеряется в килограмм-сила-сантиметрах. Часто к этому пункту прилагается график, в котором выражается зависимость вращательного момента от частоты вращения. Чем выше этот показатель, тем быстрее мотор набирает обороты при включении. - Удерживающий момент
. Он показывает, с какой силой статор может блокировать ротор, когда двигатель включен, но не запущен. То есть это параметр крутящего момента при нулевой скорости. По графику он снижается прямо пропорционально повышению скорости вращения. Измеряется данный показатель в унциях-на-дюйм. Удерживающий момент в мере, указанной производителем, мотор может продемонстрировать лишь в статическом режиме, при условии, что полный ток подается сразу в две фазы. - Тормозящий момент
. Это величина силы, удерживающей ротор от вращения в условиях отсутствия подачи тока. То есть, сила фиксации ротора при выключении. Также его именуют стопорный момент. В гибридных ШД он составляет не более десятой части от величины силы, удерживающей ротор от проворачивания при полной подаче тока. Данная характеристика измеряется в тех же единицах, что и удерживающий момент. - Номинальное напряжение
. Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.
Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение. - Отдельно указывается результат проведения диэлектрических испытаний, в ходе которых было определено максимальное напряжение, которое способна выдержать обмотка в течение определенного отрезка времени. Этим показателем определяется прочность двигателя, то, насколько успешно он может сопротивляться перегрузкам.
- Момент инерции подвижной части мотора
. Определяет скорость разгона ШД. Данная величина измеряется в грамм-квадратных сантиметрах. - Количество шагов за один оборот
(учитываются только полные шаги, половинчатые значения не берутся во внимание). Чем больше шагов, тем мощнее и быстрее двигатель. - Длина и масса
. Имеется в виду именно длина корпуса, без учета вала. А вот в параметре «вес» указывается общая масса изделия. От габаритов и массы зависит, в каких условиях может использоваться двигатель. В одних случаях нужен компактный мотор, а в других подойдет только более крупный и мощный.
 Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.
Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.Рассмотрим на примере шаговый двигатель nema. Двигатель PL57h51, что обозначает ширину-высоту (диаметр) по квадратному фланцу 57мм — PL57. Длина двигателя, без вала 41мм — h51. Крутящий, удерживающий и другие моменты двигателя больше зависят от диаметра, чем от длины двигателя.
Характеристики PL57h210
| PL57h210 | L, мм | 131 | Индуктивность фазы, мГн | 6. 0±20% 0±20% |
| Угловой шаг, ° | 1.8±5% | Сопротивление фазы, Ом | 1.0±10% | |
| Число фаз | 2 | Момент удержания,кгхсм | 28 | |
| Сопротивление изоляции, МОм | 100 | Момент инерции,г х см 2 | 405 | |
| Температура окруж. среды, °С | -20~40 | Масса, кг | 1.7 | |
| Рабочая температура, °С | 110 max | Количество валов | 1 | |
| Ток фазы,А | 4 | Тип | ||
| Размер шпоночного паза, мм |
Характеристики PL86h213
| PL86h213 | L1 ±1, мм | 113 | Сопротивление фазы, Ом | 1.0±10% |
| L2±1, мм | 35 | Момент удержания, кг х см | 1″ | |
| L3 , мм | 148 | 2 | 2700 | |
| Угловой шаг, ° | 1.8±5% | Количество валов | 1 | |
| Число фаз | 2 | Масса, кг | 3.5 | |
| Сопротивление изоляции, МОм | 100 | Радиальное биение вала двигателя (нагрузка 450г.) | ||
| Температура окруж. среды, °С | -20-40 | |||
| Рабочая температура, °С | 110 max | Индуктивность фазы, мГн | 6.3±20% | |
| Ток фазы, А | 4.2 |
Подключение, драйверы и инкодеры
Как правило, управление шаговыми моторами осуществляется посредством специальных драйверов, подключаемых к LTP-порту компьютера. Драйвер принимает генерируемые программой сигналы и трансформируют их в команды двигателю, передаваемые посредством подачи тока на обмотки. Программное обеспечение может регулировать траекторию, величину, скорость и величину движения.
Драйвер является блоком управления шаговым двигателем. В станках ЧПУ управляющие сигналы формируются на ЧПУ контроллерах, поэтому к драйверу подключают 4 вывода шагового двигателя, управляющие провода с контроллера ЧПУ (обычно 4 провода) и питание + и — с блока питания. Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
В станках ЧПУ управляющие сигналы формируются на ЧПУ контроллерах, поэтому к драйверу подключают 4 вывода шагового двигателя, управляющие провода с контроллера ЧПУ (обычно 4 провода) и питание + и — с блока питания. Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
Подбирать драйвер следует по максимальному выдаваемому току нужного напряжения на выводы, для обмоток двигателя. Ток выдаваемый драйвером должен быть, либо таким же, какой будет потреблять двигатель, либо выше. На драйвере есть переключатели, с помощью которых можно выставить желаемые параметры выходного напряжения и не сжечь двигатель.
Порядок подключения шагового двигателя к общей цепи зависит от того, сколько проводов в вашем приводе и как именно вы хотите использовать ШД. Моделей существует очень много и ля каждой из них существует своя схема подключения. Количество проводов в двигателе может варьироваться в диапазоне от четырех до шести. Четырехпроводные моторы используются исключительно с биполярными механизмами.
Каждым двум обмоткам соответствует два провода. Чтобы определить необходимые пары и связь между ними, вам пригодится метр. Самыми мощными считаются шести-проводные двигатели. В них для каждой отдельной обмотки предусмотрен центр-кран и два провода. Такой ШД можно подключать и к биполярным, и к униполярным аппаратам. Вам понадобится специальный измерительный прибор, чтобы разделить провода. Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Центр-кран это обыкновенный провод, который еще называют «средним» или «центральным». Он есть в некоторых видах шаговых двигателей. В униполярных двигателях для каждой обмотки предусмотрено три провода. Два из них предназначены для подключения к транзисторам. А средний, то есть центр-кран, необходимо подключать к источнику напряжения. То есть, если вам не нужно подключать транзисторы, вы можете просто проигнорировать два боковых провода.
То есть, если вам не нужно подключать транзисторы, вы можете просто проигнорировать два боковых провода.
Пяти-проводные ШД схожи с шести-проводными, однако в них центральные провода выведены в один общий кабель, вместе с остальными. Без разрывов вам не удастся разделить между собой обмотки. Лучше всего обнаружить средний провод и соединить его с другими проводниками – это будет эффективным и самым не опасным вариантом.
Часто с ШД используются и энкодеры. Они являются просто датчиками, задача которых заключается в подаче сигналов программному обеспечению. Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег. Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Сферы применения, плюсы и минусы
Особое распространение ШД получили в высокотехнологической и тяжелой промышленности. Благодаря тому, что они являются весьма недорогостоящими, а устроены они довольно просто, спрос на них не угасает даже в 21-м веке. Часто вы можете обнаружить их в станках ЧПУ, роботизированной технике, на устройствах автоматизации (подача, дозировка, механизмы автоматической сварки и сборки и так далее).
Особо популярны шаговые двигатели в конструкциях координаторных столов и станков ЧПУ. Благодаря низкой стоимости программного обеспечения, необходимого для их функционирования, ШД являются незаменимыми в производственном секторе, в панелях управления, программирования и постановки задач и в других элементах механизмов.
Шаговые двигатели часто используются периферийных элементах ЭВМ, печатных станках и приборах, фрезерных станках и чертежных автоматах, системах контроля и управления, перфораторах, считывателях лент.
С ШД по популярности конкурируют серводвигатели, которые могут выполнять аналогичные функции в тех же условиях, что и шаговые моторы.![]()
Достоинства шаговых двигателей в сравнении с серводвигателями:
- Исправно функционируют при большом диапазоне нагрузок.
- Фиксированный угол поворота, стандартизированные размеры мотора.
- Невысокая стоимость.
- Простота установки и применения, надежность, долговечность.
- При слишком высоких оборотах двигатель не сгорает, а пропускает шаги.
Основные недостатки ШД по сравнению с серводвигателями:
- Низкий КПД. Высокое потребление энергии вне зависимости от нагрузки.
- Резкое снижение крутящего момента при увеличении частоты оборотов.
- При таких размерах и массе мощность ниже ожидаемой.
- В процессе работы мотор сильно нагревается.
- Высокий уровень шума на высокой и средней частотах.
В статье содержатся базовые сведения о работе шагового двигателя и рекомендации по способу подбора.
Шаговый двигатель — устройство с постоянной мощностью, если мощность определить как момент, умноженный на скорость. Это означает, что крутящий момент обратно пропорционален скорости. Чтобы уяснить, почему мощность мотора не зависит от скорости, представим себе идеальный шаговый двигатель.
В настоящее время рынок наполнен предложениями самых разнообразных двигателей, для самых разнообразных приложений, что немудрено запутаться при выборе шагового двигателя, даже если вы подготовились и изучили свойства шаговых моторов, узнали их основное свойство терять момент с ростом скорости вращения и, оценив момент инерции нагрузки, приведенной к валу, примерно определили какой крутящий момент на каких скоростях нужно получить от шаговика. Так как все же выбрать шаговый двигатель и на что необходимо первым делом посмотреть при покупке?
1. Тип двигателя — биполярный, униполярный, 3-фазный и т.п.
Ни один из типов двигателей не имеет каких-то радикальных преимуществ перед другими. Но у каждого из них есть свои небольшие особенности. Так, 3-фазные двигатели более скоростные — имеют меньший момент, чем биполярные такого же размера, но сохраняют его лучше, тем самым их хорошо использовать с редукторами, в скоростных передачах. Биполярные — наиболее распространенные, дают высокий удельный на малых оборотах, под них легко купить драйвер взамен вышедшего из строя. Униполярные — представляют собой гибкое решение, по сути заключают в себе несколько видов биполярных двигателей (в зависимости от того, как подключить обмотки), а также собственно униполярный 6-выводной мотор. В подавляющем большинстве биполярных достаточно, а если нужна высокая скорость вращения — имеет смысл использовать 3-фазный двигатель.
Биполярные — наиболее распространенные, дают высокий удельный на малых оборотах, под них легко купить драйвер взамен вышедшего из строя. Униполярные — представляют собой гибкое решение, по сути заключают в себе несколько видов биполярных двигателей (в зависимости от того, как подключить обмотки), а также собственно униполярный 6-выводной мотор. В подавляющем большинстве биполярных достаточно, а если нужна высокая скорость вращения — имеет смысл использовать 3-фазный двигатель.
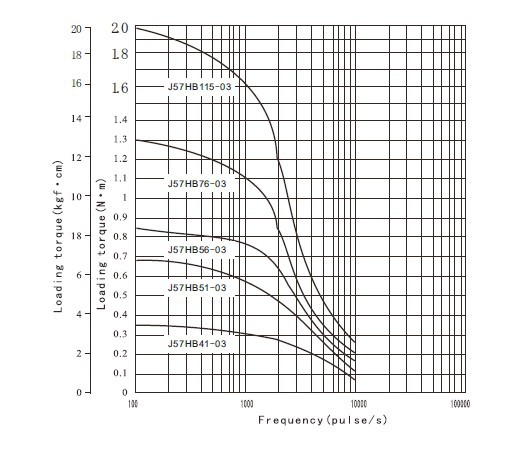
2. График зависимости момента от скорости
Основная характеристика. С этим графиком можно свериться и проверить, может ли данный шаговый двигатель вообще удовлетворить условиям вашего техзадания.
3. Индуктивность
Вычислите квадратный корень из индуктивности обмотки и умножьте на 32, полученное число сравните с напряжением вашего источника питания для драйвера. Эти числа не должны сильно отличаться — если напряжение питания сильно(30 и более %) превышает полученное число, двигатель будет шуметь и греться; если же сильно не дотягивает — крутящий момент будет убывать со скоростью слишком быстро.
4. Геометрические параметры
Фланец, диаметр вала — важны как присоединительные размеры. Фланец вкупе с длиной двигателя также обрисовывает «мощность» шагового двигателя.
Теоретические сведения о режимах работы шагового двигателя
В идеальном двигателе нет трения, его момент пропорционален амперо-виткам обмоток и единственной электрической характеристикой является индуктивность. Индуктивность L характеризует способность обмотки запасать энергию в магнитном поле. Индуктивности обладают свойством индуктивного сопротивления, т.е. сопротивления переменному току, которое тем больше, чем быстрее меняется ток, а значит, индуктивное сопротивление возрастает вместе со скоростью вращения двигателя. По закону Ома ток прямо пропорционален напряжению и обратно пропорционален полному сопротивлению, откуда следует, что ток обмотки уменьшается при увеличении скорости вращения. Т.к. момент пропорционален амперо-виткам, а ток обратно пропорционален скорости, то момент также будет обратно пропорционален скорости. Т.е. при нулевой скорости момент стремится к бесконечности, при увеличении скорости момент(и ток) начинает стремиться к нулю.
Т.к. момент пропорционален амперо-виткам, а ток обратно пропорционален скорости, то момент также будет обратно пропорционален скорости. Т.е. при нулевой скорости момент стремится к бесконечности, при увеличении скорости момент(и ток) начинает стремиться к нулю.
Электрически, реальный двигатель отличается от идеального в основном ненулевым сопротивлением обмотки, а также ферромагнитными составляющими, которым свойствоенно насыщаться магнитным полем, что приводит к гистерезисным потерям и потерям на вихревые токи. Насыщение ограничивает момент, а вихревые токи и гистерезисные потери вызывают нагрев мотора. Рассмотрим кривую зависимости крутящего момента шагового двигателя от скорости.
Как видно из графика, при скорости ниже определенного предела, момент, а следовательно и ток, возрастают очень быстро, вплоть до уровней, приводящих к повреждению мотора. Чтобы этого избежать, драйвер должен ограничивать нарастание тока до определенной величины. Поскольку момент пропорционален току, момент будет постоянен начиная с момента удержания до порогового значения скорости, а при скорости выше порога — ток будет ограничен индуктивностью обмоток.
В результате, скорость-моментная характеристика идеального двигателя будет начинаться с отрезка, где момент постоянный, до точки, когда мотор перестанет генерировать и потреблять реактивную мощность. Реальный шаговый двигатель обладает потерями, которые изменяют идеальную скорость-моментную характеристику. Особенно велик вклад момента от зубцовых гармоник магнитного поля(его иногда указывают в документации на двигатель). Потери в двигателе есть всегда, и чем быстрее вращается вал шагового мотора, тем больше потери, и их также необходимо вычитать из идеальной характеристики
Обратите внимание, как реальная мощность падает вместе с ростом скорости, в том числе и на отрезке «постоянной мощности». Скругление на переходной точке обусловлено переходным процессом в цепи — драйвер постепенно превращается из источника тока в источник напряжения.
Резонанс на средних частотах
Шаговый двигатель сильно подвержен резонансу, являясь по факту аналогом маятника «подвешенный на пружине груз», где грузом является ротор, а пружиной — магнитное поле, и имеет частоту собственных колебаний, зависящую от силы тока и инерции ротора. В момент, когда разность фаз момента и скорости достигает величины 180 град., возникает резонанс – изменение магнитного поля начинает совпадать со скоростью, и скорость ротора при позиционировании на новый шаг становится слишком велика. При резонансе значительная часть энергии магнитного поля уходит на преодоление инерции ротора при колебании около положения равновесия, что выражается в значительном падении крутящего момента на валу. Накопленная кинетическая энергия ротора расходуется при возникновении резонанса примерно за 1-10 сек, поэтому разогнать двигатель можно, пройдя зону резонанса без последствий, но работать сколь-нибудь продолжительное время не удастся – вал остановится. Для устранения этого явления в драйверах используются различные антирезонансные алгоритмы.
Мощность двигателя
Выходная мощность двигателя (скорость×момент) пропорциональна напряжению, деленному на квадратный корень из индуктивности. Если мы увеличим вдвое напряжение ШИМ, то получим другую кривую СМХ, лежащую выше, и мощность на участке постоянной мощности вырастет вдвое. С током иная картина. Рисунок ниже показывает, что будет при выставлении на драйвере тока в 2 раза больше номинального для двигателя. Мотор начинает выделять в 4 раза больше тепла, а момент на низких оборотах увеличивается менее чем в 2 раза из-за насыщения сердечников обмоток.
Как можно видеть, мощность не увеличивается вовсе. Всегда рекомендуется выставлять ток на драйвере равным номинальному значению для двигателя. Это в том числе снизит вибрации на низких частотах, улучшит характеристики хода в микрошаговом режиме.
Напряжение питания и нагрев двигателя
Основные причины нагрева двигателя: потери на сопротивлении обмоток и ферромагнитные потери.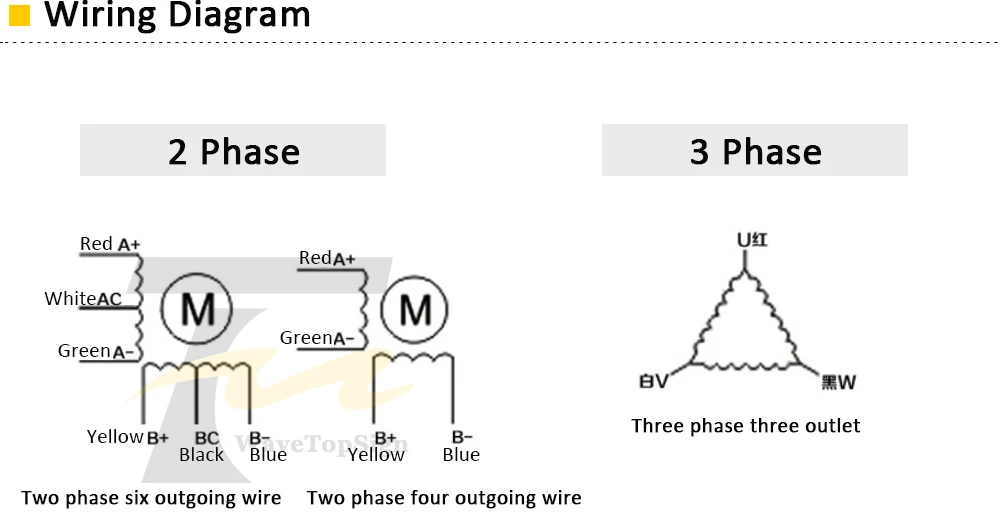 Первая часть всем знакома – это тепловая энергия, выделяющяяся на активном сопротивлении проводов обмоток, равная I2R. Вклад этого слагаемого велик только когда двигатель находится в режиме удержания, и резко уменьшается с возрастанием скорости двигателя. Ферромагнитными потерями назваются потери на токи Фуко и гистерезисные потери. Они зависят от изменения тока и, следовательно, от питающего напряжения, и выделяются в виде тепла. Как было сказано выше, мощность двигателя растет прямо пропорционально напряжению, однако ферромагнитные потери тоже растут, причем, в отличие от мощности, — нелинейно, что и ограничивает максимальное напряжения, которое можно использовать для драйвера. Можно сказать, что максимальная полезная мощность шагового двигателя определяется количеством тепла, которое может на нем безопасно выделяться. Поэтому не следует стараться выжать полкиловатта из двигателя 57 серии, подключив драйвер к источнику в 10 кВ – у напряжения есть разумные пределы. Их можно рассчитывать разными способами. Эмпирически было получено несколько оценок сверху для максимального питающего напряжения ШИМ-драйвера: оно не должно превышать номинальное напряжение обмоток более чем в 25 раз или величину 32√ L, где L – индуктивность обмотки.
Первая часть всем знакома – это тепловая энергия, выделяющяяся на активном сопротивлении проводов обмоток, равная I2R. Вклад этого слагаемого велик только когда двигатель находится в режиме удержания, и резко уменьшается с возрастанием скорости двигателя. Ферромагнитными потерями назваются потери на токи Фуко и гистерезисные потери. Они зависят от изменения тока и, следовательно, от питающего напряжения, и выделяются в виде тепла. Как было сказано выше, мощность двигателя растет прямо пропорционально напряжению, однако ферромагнитные потери тоже растут, причем, в отличие от мощности, — нелинейно, что и ограничивает максимальное напряжения, которое можно использовать для драйвера. Можно сказать, что максимальная полезная мощность шагового двигателя определяется количеством тепла, которое может на нем безопасно выделяться. Поэтому не следует стараться выжать полкиловатта из двигателя 57 серии, подключив драйвер к источнику в 10 кВ – у напряжения есть разумные пределы. Их можно рассчитывать разными способами. Эмпирически было получено несколько оценок сверху для максимального питающего напряжения ШИМ-драйвера: оно не должно превышать номинальное напряжение обмоток более чем в 25 раз или величину 32√ L, где L – индуктивность обмотки.
Для наглядности ниже показан график, показывающий ферромагнитные потери для двигателя с номинальными характеристиками 4 А, 3 В.
Кратко о мощности шагового двигателя
Выбор двигателя и питающего напряжения целиком зависят от задач. В идеале, двигатель должен выдавать достаточный момент на максимальной планируемой скорости. Необходимо отличать момент от мощности двигателя: большой момент на низких скоростях не означает, что двигатель мощный. Выходная мощность – другой, более важный параметр, её примерно можно оценить по кривой скорости-момента. Теоретически, максимальная мощность, которую можно стабильно получать с драйвера, питаемого напряжением 80 В и выходным током 7 А примерно 250 Ватт(1/3 л.с.), в реальности же для этого потребуется 2 или 3 двигателя NEMA 34. Двигатели NEMA 23 слишком малы для отвода тепла, а NEMA 42 из-за размера не подходят по импедансу: если их номинальный ток меньше, чем 7 А, то напряжение будет больше 80 В, и наоборот. Момент от зубцовых гармоник в моторах NEMA 42 существенно больше, чем в малых моторах, и обязательно должен быть учтен при расчете выходной мощности. Другими словами, выходная мощность двигателей NEMA 42 падает быстрее, чем у меньших двигателей. NEMA 42 следует использовать, если требуется получить высокий момент на низких скоростях и нет смысла использовать мотор-редуктор.
Двигатели NEMA 23 слишком малы для отвода тепла, а NEMA 42 из-за размера не подходят по импедансу: если их номинальный ток меньше, чем 7 А, то напряжение будет больше 80 В, и наоборот. Момент от зубцовых гармоник в моторах NEMA 42 существенно больше, чем в малых моторах, и обязательно должен быть учтен при расчете выходной мощности. Другими словами, выходная мощность двигателей NEMA 42 падает быстрее, чем у меньших двигателей. NEMA 42 следует использовать, если требуется получить высокий момент на низких скоростях и нет смысла использовать мотор-редуктор.
О ЧЕМ ГОВОРЯТ ХАРАКТЕРИСТИКИ ШАГОВОГО ДВИГАТЕЛЯ
Если вы опустили все, написанное выше, или прочитали, но мало что поняли, данная глава поможет разобраться, как перейти к практической части. Несколько слов о размере двигателя. Развитие производства шаговых двигателей достигло больших успехов, и теперь шаговые двигатели одного размера разных производителей обладают очень схожими характеристиками. Именно размер двигателя задает рамки, в которых может изменяться его главная характеристика — кривая скорости-момента. Индуктивность
обмотки показывает, насколько крута будет кривая СМХ при одинаковом напряжении питания драйвера с ШИМ: если мы возьмем 2 двигателя индентичного размера с разной индуктивностью, и будем управлять ими одним драйвером с одним и тем же питающим напряжением, полученные кривые СМХ будут отличаться крутизной:
Большая индуктивность потенциально дает вам возможность получить больший крутящий момент, но чтобы произвести такую конверсию, потребуется драйвер с большим напряжением питания — тогда кривая СМХ поднимется вверх пропорционально увеличению напряжения. На практике почти все фирмы производят моторы одного размера в двух исполнениях — «медленный» и «быстрый», с большой и малой индуктивностью. Причем «быстрые» модели пользуются большей популярностью — для них на высоких оборотах требуется меньшее напряжение, а значит более дешевые драйверы и источник питания. А если вдруг не хватает мощности — можно взять двигатель побольше. «Медленные» модели остаются для специфических применений — в случаях, когда от шагового привода не требуется больших скоростей, нужен большой момент удержания и т.п.
А если вдруг не хватает мощности — можно взять двигатель побольше. «Медленные» модели остаются для специфических применений — в случаях, когда от шагового привода не требуется больших скоростей, нужен большой момент удержания и т.п.
Ток
обмотки косвенно связан с крутящим моментом, но в основном он говорит о том, какой драйвер нужно будет подобрать к этому двигателю — он должен быть способен выдавать именно такой уровень тока.
Напряжения питания обмотки
показывает, какое постоянное(не ШИМ) напряжение можно подавать на обмотку — таково значение напряжения, используемое драйверами постоянного напряжения. Оно пригодится при вычислении максимально допустимого напряжения питания драйвера с ШИМ, и тоже косвенно связано с максимальным крутящим моментом.
АЛГОРИТМ ПОДБОРА ШАГОВОГО ДВИГАТЕЛЯ
Так как же выбрать двигатель? Зависит от того, какими вы данными обладаете. По большому счету, выбор двигателя сводится к выбору 5 вещей — производителя, вида двигателя, размера, тока фазы и индуктивности. Первый параметр поддается оценке с трудом — мало у кого репрезентативная выборка образцов от разных поставщиков. Что касается вида двигателя, мы рекомендуем всегда, когда есть неопределенность в выборе, использовать биполярные шаговые двигатели с 4 выводами и малой индуктивностью. Т.е. выбор в основном заключается в выборе размера двигателя(в пределах одного размера характеристики двигателей с одной индуктивностью почти всех производителей практически совпадают). Для выбора конкретной модели можно использовать следующий алгоритм:
- Рассчитайте максимальную скорость вращения V в об/сек, которую хотите получить от привода, и момент M, который необходимо получить от него на этой скорости(закладывайте в это значение запас в 25-40%).
- Переведите скорость вращения в частоту полных шагов PPS, для стандартного двигателя с шагом 1.8 град PPS = 200 * V.
- Выберите примерно подходящий на первый взгляд размер двигателя, из числа доступных моделей этого размера выберите двигатель с не самой большой индуктивностью.
- Воспользуйтесь кривой СМХ, приводимой производителем, найдите на ней ваше значение PPS. Сверьтесь, достаточен ли момент, указанный на кривой.
- Если момент, указанный на кривой слишком мал, рассмотрите двигатель размером побольше, если слишком велик — размером поменьше.

Однако, часто этот способ дает неверные результаты по причине большого количества факторов и допущений при расчете момента. Запросто можно получить, что для управления небольшим портальным фрезером с порталом весом 15 кг вдруг потребуются двигатели ST86-114. Чаще используют эмпирические способы, и они оказываются точнее. Один из таких способов — определение двигателей по весу портала и размеру рабочего поля. Например, выбор шагового мотора для горизонтальной передачи(оси X и Y) можно осуществить исходя из веса подвижной части, передачи, направляющих и материалов, планируемых к обработке. Для портальных станков классической компоновки, с передачей ШВП, шагом 5 мм на оборот, для обработки дерева и пластика, скорость холостого хода до 4000 мм/мин, в предположении, что направляющие оси без преднатяга и отъюстированы так, что подвижная часть ходит по ним без какого-либо сопротивления, можно порекомендовать следующие значения:
Еще один распространенный подход заключается в анализе готовых станков на рынке, которые близки к конструируемому по размерам и характеристикам — проверенная конструкция означает, что двигатели уже подобраны оптимальным образом, и можно взять их характеристики за основу.
Шаговый двигатель понадобится любому человеку, который собрался самостоятельно собрать станок с ЧПУ. Главное – заранее определиться со сферой применения устройства. Наибольших усилий и показателей требует обработка цветных металлов, что отдельно учитывается при выборе шагового двигателя для ЧПУ.
Какие критерии определяющие для выбора?
Надо помнить о том, что, по сравнению с обычными двигателями, шаговые требуют более сложных схем для управления. А критериев не так уж много.
- Параметр индуктивности.
Первый шаг – определение квадратного корня из индуктивности обмотки. Результат потом умножаем на 32. Значение, полученное в качестве итога, потом требуется сравнивать с напряжением источника, от которого питание идёт к драйверу.
Эти числа не должны отличаться друг от друга слишком сильно. Мотор будет греться и шуметь слишком сильно, если напряжение питания больше полученного значения на 30 и больше %. Если же он меньше, то, по мере нарастания скорости, крутящий момент убывает. Чем больше индуктивность – тем проще сохранить высокий крутящий момент. Но для этого надо подобрать драйвер, имеющий большое напряжение питания. Только в этом случае шаговой двигатель работает нормально.
- График того, как крутящий момент и скорость зависят друг от друга.
Это позволит понять, насколько двигатель в принципе соответствует запросам и техническому заданию.
- Параметры геометрического плана.
- Максимальный статический синхронизирующий момент.
- Момент по инерции у роторов.
- Ток внутри фазы по номиналу.
- Общее сопротивление фаз омического типа.
О разновидностях двигателей
Для станка используемая разновидность шаговых двигателей – параметр не менее важный, чем остальные. Каждая модель наделена своими особенностями.
- Биполярные чаще всего применяются совместно с ЧПУ.
Главное достоинство – возможность легко выбрать новый драйвер, если старый выходит из строя. На малых оборотах при этом сохраняется высокое удельное сопротивление.
- Трёхфазные.
Для них характерна высокая скорость. Актуальны, если именно данному параметру уделяют больше всего внимания в случае выбора.
- Униполярные.
Это несколько видов биполярных двигателей, которые отличаются друг от друга и подбираются в зависимости от подключения обмотки.
Можно изучить готовые модели станков, предлагаемые текущим рынком. Благодаря подобному подходу выбор значительно упрощается. Главное – чтобы характеристики и размеры подходили к создаваемому проекту.
Главное – чтобы характеристики и размеры подходили к создаваемому проекту.
Об усилиях резания
Часто владельцы думают, что на надо сильно давить, иначе она будет неправильно работать. Это заблуждение, которое не соответствует истине. Важнее всего то, как правильно пользователь задаёт параметры рабочего процесса.
Не обязательно пользоваться сложными специальными формулами, чтобы понять, как правильно действовать. Это можно проверить и прямо голыми руками.
По поводу резонанса при средних частотах
Шаговые двигатели связаны с возникновением сильного резонанса. По сути, они работают, как маятник с подвешенным на пружине грузиком. Роль груза выполняет ротор, а поле с магнитной энергией – пружина. Собственные колебания имеют частоту, определяемую по двум показателям:
- Инерция ротора.
- Сила тока.
Резонанс появляется, когда разность между скоростью и фазностью момента достигает 180 градусов. Это означает, что присутствует соответствие скорости и изменений внутри магнитного поля. Движение становится быстрым при позиционировании по новому шагу. Крутящий момент падает из-за того, что больше всего энергии уходит, чтобы преодолеть инерцию.
Об энкодерах и драйверах, подключениях
Специальные драйверы нужны для того, чтобы управлять устройством. Они подключаются к LTP портам у персональных компьютеров. От программы идёт генерация сигналов, которые потом принимаются драйверами. После чего двигатель и получает определённые команды. Подача тока на обмотки позволяет организовать работу всего устройства. Программное обеспечение облегчает контроль:
- По двигательной величине.
- Для скоростей.
- По траекториям.
Драйвер – это блок, отвечающий за управление всем двигателем. Формирование управляющего сигнала происходит при участии специального контроллера. Что предполагает подключение к устройству сразу четырёх выводов шагового двигателя. С блока питания идёт энергия, отрицательная и положительная, она и соединяется с моторами для дальнейшей работы.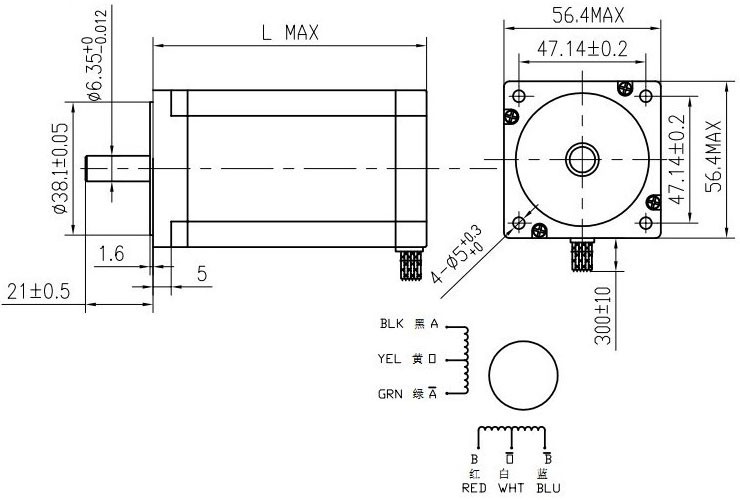
Максимум по току требуемого напряжения, идущего к выводам – главный фактор, на основании которого следует делать выбор. Ток, выдаваемый драйвером, может быть следующих типов:
- Такой же, что потребляет двигатель.
- Выше, чем упомянутое ранее значение.
Желаемые параметры по исходному напряжению выбираются при помощи специальных переключателей.
Шаговые двигатели могут иметь различный порядок подключения. Обычно он зависит от того, каким количеством проводов снабжён привод. Надо обратить внимание и на назначение устройства. На рынке выпускается множество моделей, и практически у каждой используется свой вариант подключаемой схемы. Внутри размещается до 4-6 проводов. Биполярные модули сопровождают стандартно именно варианты с четырьмя проводами.
Каждые две обмотки идут с двумя приводами. Нужно использовать обычный метр, чтобы не допустить ошибок. Шестипроводные двигатели отличаются максимальной мощностью. Это значит, что каждая обмотка сопровождается двумя проводами и одним центр-краном. Такие аппараты допускают два вида соединений:
- С биполярными аппаратами.
- С униполярными моделями.
Для разделения проводов так же применяются приборы измерения. Однополярные устройства предполагают, что используются все шесть проводов. В случае с биполярными можно взять всего один центральный кран вместе с проводами по одной обмотке.
Что ещё учесть?
Центр-краном называют обычный провод. Ещё для него используют обозначения «центральный», «средний». Часть моделей шаговых двигателей снабжаются подобными приспособлениями. Каждая обмотка идёт совместно с тремя проводами, когда речь идёт об униполярных вариантах. Два из них организуют соединение с транзисторами. Центр-кран или средний идёт прямо до источника питания или напряжения.
Два боковых провода вообще можно игнорировать, если транзисторы использовать не планируется.
Пяти- и шестипроводные модели во многом похожи друг на друга. Но внутри центральные провода выводятся в один общий кабель, вместе с остальными составляющими. Обмотки не удастся соединить друг с другом, если будут отсутствовать разрывы. Лучше всего именно средний провод соединять с другими проводниками. Тогда об эффективности и безопасности устройства можно будет не волноваться. Нужно просто брать подходящие детали.
Но внутри центральные провода выводятся в один общий кабель, вместе с остальными составляющими. Обмотки не удастся соединить друг с другом, если будут отсутствовать разрывы. Лучше всего именно средний провод соединять с другими проводниками. Тогда об эффективности и безопасности устройства можно будет не волноваться. Нужно просто брать подходящие детали.
Заключение
Подобрать подходящую модель двигателя для станка будет проще, если заранее изучить основные характеристики, а так же предложения на соответствующем рынке. Главное – обращаться к поставщикам, которые заслуживают доверия. Малейший брак и ошибка приведут к выходу из строя весьма дорогостоящих деталей.
Любая
разработка начинается с выбора
компонентов. При
разработке ЧПУ станка
очень важно правильно подобрать шаговые
двигателя
. Если у вас есть деньги на
покупку новых двигателей, в таком случае
нужно определить рабочее напряжения и
мощность двигателя. Я купил себе для
второго
ЧПУ станка
шаговые двигателя
вот такие:
Nema17 1.7 А .
Если
у вас нет достаточно денег или вы просто
пробуете свои
силы в данной сфере. То вы скорее всего
будите использовать
двигателя из
принтеров
. Это самый недорогой вариант.
Но тут Вы столкнетесь
с рядом проблем. У двигателя
может быть 4, 5, 6, 8 — проводов для
подключения. Как их подключить к драйверам
L298n
и .
Давайте
разберемся по порядку. Какие шаговые
двигателя бывают. Если вы видите
четное количество выводов это
биполярный
шаговый двигатель
. Расположение обмотки
для данного двигателя
вот такое.
Если
у двигателя
5 выводов, это
униполярный шаговый
двигатель
. Вот так выгладит
его схема.
Наши
драйвера рассчитаны
на двигателя с 4 выводами
. Как быть? Как
их подключить?
Биполярные
ШД с 6-ю выводами подключаются к драйверу
двумя способами:
В
данном случае ШД имеет момент в 1.4 раза
больше. Момент более стабилен на низких
частотах.
При
таком типе подключения нужно уменьшить
ток, подаваемый на обмотки двигателя
в √2 раз. Например, если номинальный
рабочий ток двигателя составляет 2 А,
то при последовательном включении
обмоток требуемый ток — 1.4 А, то есть в
1.4 раза меньше.
Это
можно легко понять из следующих
рассуждений.
Номинальный
рабочий ток, указанный в каталоге,
рассчитан на сопротивление одной обмотки
(R — именно оно приведено в каталоге). При
последовательном включении обмоток
сопротивление объединенной обмотки
возрастает в два раза (2R).
Потребляемая
мощность ШД — I*2
* R
При
последовательном включении обмоток
потребляемая мощность становится
Iпосл.*2 *
2 * R
Потребляемая
мощность не зависит от типа подключения,
поэтому I*2 *
R = Iпосл.*2 *
2* R, откуда
Iпосл.=
I/ √2, т.е.
Iпосл.=
0.707 *I.
Так
как крутящий момент двигателя прямо
пропорционален величине магнитного
поля, создаваемого обмотками статора,
то он возрастает с увеличением числа
витков обмотки и убывает с уменьшением
ток, пропускаемого через обмотки. Но
так как ток уменьшился в √2 раз, а число
витков обмотки увеличилось в 2 раза, то
крутящий момент возрастет в √2 раз.
Tпосл. =
1.4 * T.
Во
втором случае момент
более стабилен на высоких частотах.
Параметры ШД при таком подключении
соответствуют заявленным в
datasheet,
(момент, ток), момент более стабилен на
высоких частотах
.
Униполярный
шаговый двигатель можно переделать.
Для этого нужно разобрать шаговый
двигатель и перерезать провод соединяющий
центр обмоток. И при подключении общий
провод подключать ни куда не нужно.
В
итоге у нас получается биполярный
двигатель с 4 выводами.
Шаговые
двигателя с 8-ю выводами можно подключить
тремя способами.
Подключение
А — шаговик работает с характеристиками,
заявленными в описании (момент, ток),
момент более стабилен на высоких
частотах.
Подключение
B – момент 1.4 раза, момент более
стабилен на низких частотах (относительно
А).
Подключение
C – момент 1.96 раза, момент более
стабилен на высоких частотах (относительно
А).
Вот
мы и решили проблему подключения шаговых
двигателей. Но не все двигателя у нас
заработают. Нужно еще определить
рабочее напряжение двигателей. Самый
правильный
способ это найти
datasheet.
Так
все
параметры
есть. Но не
ко
все двигателя из принтера можно найти
datasheet.
В
таких случаях я пользуюсь вот такой
таблицой.
Не
знаю на сколько данная таблица верная
но у меня все сходиться и работает как
надо.
Двигателя
я выбираю чтобы рабочее напряжение было
меньше или равно напряжению источника
питания. Для двигателей рассчитанных
на меньшее напряжения необходимо
настроить ток ниже.
Настраивать
будем
в следующей статье. Не
пропустите
!
Подписывайтесь
на мой канал на
Youtube
и вступайте в группы в
При подборе шагового двигателя для ЧПУ необходимо отталкиваться от планируемой сферы применения станка и технических характеристик. Ниже представлены критерии выбора, классификация наиболее популярных двигателей и примеры расчета.
Как выбрать шаговый двигатель для ЧПУ: критерии
- Индуктивность.
Следует вычислить квадратный корень из индуктивности обмотки и умножить его на 32. Полученное значение нужно сравнить с напряжением источника питания для драйвера. Различия между этими числами не должны сильно отличаться. Если напряжение питания на 30% и более превышает полученное значение, то мотор будет греться и шуметь. Если меньше, то крутящий момент будет слишком быстро убывать со скоростью. Большая индуктивность потенциально обеспечит возможность для большего крутящего момента. Однако для этого потребуется драйвер с большим напряжением питания. - График зависимости крутящего момента от скорости.
Позволяет определить, удовлетворяет ли выбранный двигатель условиям в техническом задании. - Геометрические параметры.
Имеет значение длина двигателя, фланец и диаметр вала.
Совет:
также следует обратить внимание на омическое сопротивление фаз, номинальный ток в фазе, момент инерции ротора, максимальный статический синхронизирующий момент.
Тип двигателя
Важный критерий – тип шагового двигателя для ЧПУ станка. Широко распространены биполярные, униполярные и трехфазные модели. Каждая из них имеет свои особенности:
- биполярные чаще всего используют для ЧПУ благодаря простому подбору нового драйвера при выходе старого из строя, высокому удельному сопротивлению на малых оборотах;
- трехфазные отличаются большей скоростью, чем биполярные аналогичного размера. Подходят для случаев, когда требуется высокая скорость вращения;
- униполярные представляют собой несколько видов биполярных двигателей в зависимости от подключения обмоток.
Совет:
еще один способ подбора двигателя – анализ готовых станков на рынке, которые близки по размерам и другим характеристикам к разрабатываемому.
Примеры расчетов шаговых двигателей для ЧПУ
Определяем силы, действующие в системе
Необходимо определить силу трения в направляющих, которая зависит от используемых материалов. Для примера коэффициент трения составляет 0.2, вес детали – 300 кгс, вес стола – 100 кгс, необходимое ускорение – 2 м/с 2 , сила резания – 3 000 Н.
- Чтобы рассчитать силу трения нужно умножить коэффициент трения на вес движущейся системы. Для примера: 0.2 x 9.81 (100 кгс+300 кгс). Получается 785 Н.
- Чтобы рассчитать силу инерции надо умножить массу стола с деталью на требуемое ускорение. Для примера: 400 x 2 = 800 Н.
- Чтобы рассчитать полную силу сопротивления надо сложить силы трения, инерции и резания. Для примера: 785 + 800 + 3 000. Получается 4 585 Н.
Справка:
силу сопротивления должен развивать привод стола на гайке шариковой винтовой передачи.
Рассчитываем мощность
Формулы, приведенные ниже, представлены без учета инерции вала самого шагового двигателя и других вращающихся механизмов. Поэтому для большей точности рекомендуется увеличить или убавить требования по ускорению на 10%.
Поэтому для большей точности рекомендуется увеличить или убавить требования по ускорению на 10%.
Для расчета мощности шагового двигателя следует воспользоваться формулой F=ma, где:
- F – сила в ньютонах, необходимая для того, чтобы привести тело в движение;
- m – масса тела в кг;
- а – необходимое ускорение m/c 2 .
Для определения механической мощности необходимо умножить силу сопротивления движения на скорость.
Рассчитываем редукцию оборотов
Определяется на основании номинальных оборотов сервопривода и максимальной скорости перемещения стола. Например, скорость перемещения составляет 1 000 мм/мин, шаг винта шариковой винтовой передачи – 10 мм. Тогда скорость вращения винта ШВП должна быть (1 000 / 10) 100 оборотов в минуту.
Для расчета коэффициента редукции учесть номинальные обороты сервопривода. Например, они равны 5 000 об/мин. Тогда редукция будет равна (5 000 / 100) 50.
В станках часто применяют шаговые двигатели индукторного типа, изготовленные в СССР. Речь о моделях ДШИ-200-2 и ДШИ-200-3. Они обладают следующими характеристиками:
| Параметр | ДШИ-200-2 | ДШИ-200-3 |
|---|---|---|
| Потребляемая мощность | 11.8 Вт | 16.7 Вт |
| Погрешность обработки шага | 3% | 3% |
| Максимальный статический момент | 0.46 нт | 0.84 нт |
| Максимальная чистота приемистости | 1 000 Гц | 1 000 Гц |
| Напряжение питания | 30 В | 30 В |
| Ток питания в фазе | 1.5 А | 1.5 А |
| Единичный шаг | 1.8 град | 1.8 град |
| Масса | 0. 54 кг 54 кг | 0.91 кг |
Как увеличить динамический крутящий момент шагового двигателя? — Промышленные знания — Новости
Как увеличить динамический крутящий момент шагового двигателя?
Сначала выберите шаговый двигатель с малым шагом
При малой скорости крутящий момент увеличивается с увеличением числа зубьев ротора. Выберите шаговый двигатель с малым шагом, чтобы получить высокий крутящий момент. Фактически, зубцы ротора HB как 50 зубьев, утечка магнитного потока магнитных потоков увеличится, но не будет пропорциональный, этот вывод эффективен для 100 зубов. Трехфазный шаговый двигатель HB-типа от 1,2 градуса (ротор 50 зубов) меняет 0,6 градуса (ротор 100 зубов), примерно с 1,4 до 1,8 раз низким крутящим моментом.
Во-вторых, биполярная проводка
Эффективность может улучшиться в 2 раза. Легко купить двухфазный однополярный или биполярный шаговый двигатель, но биполярная мощность силовой трубки больше, чем однополюсная.
Способ для шагового двигателя увеличить крутящий момент на высокой скорости:
1, уменьшите количество витков, так что L уменьшено
Выберите малую индуктивность L из стандартных продуктов производителей двигателей, номинальный ток станет больше.
2, магнитный поток постоянного магнита нужен небольшой
Если производитель не может уменьшить постоянный магнит, может увеличить воздушный зазор, чтобы уменьшить обратную ЭДС на высокой скорости, увеличить ток, чтобы увеличить крутящий момент, сделать характеристики крутящего момента с низкой и высокой скоростью в прямую линию , увеличить крутящий момент на высокой скорости и увеличить частоту отклика.
В-третьих, выберите шаговый угол большого двигателя
Шаговый двигатель при высокоскоростной работе, способ улучшения крутящего момента на схеме привода:
1, улучшить напряжение тока возбуждения
Чтобы поддерживать высокий крутящий момент на высокой скорости, необходимо поддерживать постоянный ток и удерживать измельчитель в постоянном токовом состоянии. Чтобы сделать постоянный ток только для улучшения частоты импульсов. Когда скорость шагового двигателя на определенной высокой скорости , из-за ограничений напряжения, может работать только в состоянии постоянного напряжения, если увеличить входное напряжение, вы можете заставить его работать в постоянном токе на высокой скорости, тем самым увеличивая крутящий момент на высокой скорости.
Чтобы сделать постоянный ток только для улучшения частоты импульсов. Когда скорость шагового двигателя на определенной высокой скорости , из-за ограничений напряжения, может работать только в состоянии постоянного напряжения, если увеличить входное напряжение, вы можете заставить его работать в постоянном токе на высокой скорости, тем самым увеличивая крутящий момент на высокой скорости.
2, Уменьшите ток, когда цепь привода отключена
Ток в катушке Когда силовая трубка выключена, из-за большой скорости изменения тока катушка производит очень большое индуцированное напряжение,
силовая трубка будет подвержена риску прокола, обычно есть цепь защиты.
Шаговый двигатель
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
Описание
Блок Stepper Motor (STM) реализует типовую модель, которая представляет два самых популярных семейства шаговых двигателей:
Модель Stepper Motor состоит из электрических и механических разделов. Электрический раздел представлен эквивалентной схемой, настройка которой зависит от моторного типа. Эквивалентные схемы принимают, что магнитная схема линейна (никакое насыщение), и взаимная индуктивность между фазами незначительна. Механический раздел представлен моделью в пространстве состояний на основе момента инерции и коэффициента вязкого трения.
Этот рисунок показывает эквивалентную схему для одной фазы в шаговом двигателе переменного нежелания.
В этой модели Ra и La (θ), соответственно, представляют сопротивление и индуктивность фазы обмотка. Извилистая индуктивность варьируется как функция положения ротора:
La (θ) = L 0 + L 1cos (Nrθ),
где,
L 0 является средней индуктивностью.
L 1 является максимальным изменением индуктивности.
Nr является зубным номером ротора.

В ссылочном положении (θ = 0), зуб ротора полностью выравнивается с полюсом A-оси, чтобы достигнуть максимальной A-фазы извилистая индуктивность.
Общий электромагнитный крутящий момент, произведенный двигателем, является суммой крутящих моментов, произведенных моторными фазами:
где,
m является количеством фаз.
ix является обмоткой, текущей в фазе x.
Lx является функцией индуктивности обмотки фазы x.
Этот рисунок показывает эквивалентную схему для одной фазы в постоянном магните (PM), или гибридный шаговый двигатель.
В этой модели Ra и La, соответственно, представляют сопротивление и индуктивность обмотки A-фазы. Из-за большого значения воздушного зазора, введенного магнитами, извилистая индуктивность премьер-министра или гибридного шагового двигателя может считаться независимой от положения ротора. Исходный ea напряжения (θ) представляет моторную противоэлектродвижущую силу (EMF), который является синусоидальной функцией положения ротора:
где,
p является количеством пар полюса. Количество пар полюса p дано p = Nr/2.
ψm является моторным максимальным магнитным потоком.
Обратите внимание на то, что в ссылочном положении (θ = 0), Северный полюс на роторе полностью выравнивается с полюсом A-оси, чтобы достигнуть нулевого значения коэффициента противо-ЭДС A-фазы.
Электромагнитный крутящий момент, произведенный двухфазным PM или гибридным шаговым двигателем, равен сумме крутящего момента, следующего из взаимодействия токов фазы и магнитных потоков, созданных магнитами и крутящим моментом стопора, который следует из выступа ротора:
Te = –pψmiasin(pθ) – sin pψmib (pθ – π/2) – T dmsin (m Nrθ).
где,
Как получить параметры шагового двигателя
Параметры, используемые в модели степпера, обычно получаются из таблиц данных производителя. В случае, если параметры не доступны, можно определить их из экспериментальных измерений.
Параметры шагового двигателя переменного нежелания
Параметры, обеспеченные таблицами данных производителя, обычно: количество фаз, содержа крутящий момент, угол шага, напряжение на фазу, текущую на фазу, сопротивление обмотки, Ra, максимальную индуктивность, Lmax, среднюю индуктивность, L0, и инерцию ротора, J.
Параметры Шагового двигателя постоянного магнита/Гибрида
Параметры, обеспеченные таблицами данных производителя, обычно:
количество фаз
содержание крутящего момента
угол шага
напряжение на фазу
текущий на фазу
сопротивление обмотки, Ra
извилистая индуктивность, La
инерция ротора, J
Максимальный крутящий момент стопора, Tdm, не всегда задается. Этот параметр может быть принят, чтобы быть равным 1-10% максимального крутящего момента содержания.
Максимальное потокосцепление, ψm, не всегда задается. Этот параметр может быть получен экспериментально путем управления двигателем к постоянной скорости, N, в об/мин, и путем измерения максимальной разомкнутой цепи извилистое напряжение, Em, в V.
Параметр ψm затем вычисляется следующим отношением:
где p является количеством пар полюса, данных p =360 / (2m · шаг. Здесь m = номер фазы, продвиньтесь = угол шага в градусах.
Ссылки
[1] Т. Кенджо, А. Сугоара, шаговые двигатели и их микропроцессорные управления, 2-й выпуск, издательство Оксфордского университета, Оксфорд, 2003.
[2] П. Акарнли, Шаговые двигатели — руководство по теории и практике, 4-му Выпуску, Учреждению Инженеров-электриков, Лондона, 2002.
Шаговые двигатели — Линейные системы
Шаговый двигатель является исполнительным звеном в системах шагового привода, преобразует электрическую энергию в механическую. Двигатель называют шаговым потому, что при изменении тока в обмотках двигателя соответствующим образом — ротор двигателя совершает дискретный поворот вокруг своей оси на определенный угол (угловой шаг). Помимо поворота, шаговый двигатель позволяет удерживать ротор в определенном положении, путем поддержания уровня тока в обмотках. Таким образом, становится возможным построение системы с точным позиционированием, или следящей системы без эффекта «рыскания».
Для осуществления полезного перемещения шаговый двигатель присоединяется через муфту к ходовому винту, шарико-винтовой передаче или напрямую, к ведущей шестерне зубчатой передачи.
Скачать каталог шаговых двигателей в формате pdf(4.58 MB)
При выборе шагового двигателя, наиболее важно обратить внимание на крутящий момент. Максимальный крутящий момент напрямую связан с размерами двигателя: чем больше двигатель — тем больше крутящий момент. В каталогах обычно указывается максимальный квазистатический крутящий момент — этот параметр является оценочным, т.к. крутящий момент шагового двигателя заметно снижается с увеличением скорости вращения (вернее, частоты коммутации обмоток). Как правило наиболее эффективным оказывается использование шагового двигателя в диапазоне до 1500..2000 шагов в секунду в полушаговом или микрошаговом режимах, выбираемых с помощью драйвера управления ШД.
Далее следует подобрать шаг двигателя (угол поворота вала), чтобы, с учетом последующей механической передачи, система обеспечила требуемую точность. Наиболее распространенными являются угол 1,8 и 0,9 градуса. При необходимости уменьшения шага можно использовать функцию дробления шага на драйвере двигателя от 1/2 до 1/256. Также дробление шага позволит сгладить вращение — сделает его более плавным.
| Серия ШД | Диаметр (сторона квадрата), мм | Крутящий момент, кгс*см | Угловой шаг, град | Рекомендуемое управление |
| FL20STH | 20.2 | 0.18 — 0.3 | 1.8 | OMD-15 + OSM 17R |
| FL28STH | 28 | 0.43 — 1.2 | 1.8 | OMD-15 + OSM 17R |
| FL35ST | 35.2 | 0.5 — 1.4 | 1.8 | OMD-15 + OSM 17R |
| FL39ST | 39.3 | 0.65 — 2.8 | 1.8 | OMD-15 + OSM 17R |
| FL42STH | 42.3 | 1.6 — 4.5 | 1.8 | OMD-40 + OSM 40R |
| FL42STHM | 42.3 | 1.58 — 4.4 | 0.9 | OMD-40 + OSM 40R |
| FL57ST | 56.4 | 2.88 — 12.5 | 1.8 | OMD-40 + OSM 40R |
| FL57STHM | 56.4 | 3.9 — 18 | 0.9 | OMD-40 + OSM 40R |
| FL57STH | 56.4 | 3.9 — 18.9 | 1.8 | OMD-40 + OSM 40R |
| FL60STH | 60 | 7/8 — 31 | 1.8 | OMD-40 + OSM 40R |
| FL86ST | 82.5 | 13 — 50 | 1.8 | OMD-88 + OSM 88R |
| FL86STH | 82.85 | 26 — 153 | 1.8 | OMD-88 + OSM 88R |
| FL110STH | 109.86 | 112 — 280 | 1.8 | OMD-88 + OSM 88R |
| FL130BYG | 132 | 275 — 509 | 1.8 | OMD-88 + OSM 88R |
Шаговые двигатели не требуют специального обслуживания, т.к. в них применяются подшипники закрытого типа, с закладной смазкой на весь срок службы. Крайне не рекомендуется производить самостоятельный ремонт шаговых двигателей, в связи с тем, что зазор между ротором и статором очень небольшой. Правильно выставить и отбалансировать ротор можно только на специальном оборудовании на заводе-изготовителе, под контролем специалистов.
Скачать каталог шаговых двигателей в формате pdf(4.58 MB)
Шаговые двигатели
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях.
По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Выбор контроллера для управления шаговым двигателем описан в статье Контроллеры ШД. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит.
В отличие от коллекторных двигателей, у которых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Виды шаговых двигателей:
· двигатели с переменным магнитным сопротивлением
· двигатели с постоянными магнитами
· гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются.
Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга.
Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности. Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге. При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
При выборе шагового двигателя одной из важнейших характеристик является его скоростные качества, то есть зависимость момента на валу от скорости вращения. Сравнить и оценить эту характеристику можно зная значения сопротивления и индуктивности обмоток выбираемого двигателя. Чем больше соотношение R/L тем быстрее нарастает ток в обмотках и тем большую скорость вращения можно достичь без существенного падения момента. Объясняется это тем, что эквивалентная схема представляет собой последовательно соединенные индуктивность и омическое сопротивление, возникающая в цепи ЭДС самоиндукции препятствует изменению тока в цепи, замедляя его возрастание, а также спад тока при размыкании цепи. Ток не может вырасти мгновенно до номинального значения, а следовательно, крутящий момент двигателя тоже нарастает не мгновенно, а по экспоненте. При увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается. Происходит снижение крутящего момента, двигатель начинает пропускать шаги.
Интернет магазин чпу станков хобби класса и комплектации
Шаговый двигатель для ЧПУ — ООО «СЗЭМО Электродвигатель»
Шаговые электродвигатели (ШД) используются там, где нужно позиционирование повышенной точности.
Что такое шаговый двигатель? Это синхронный двигатель без щеток, имеющий несколько обмоток. Для фиксации ротора в определенной позиции ток подается в одну из обмоток статора. По поступлении тока в другую обмотку ротор меняет позицию. Это и есть «шаг».
Типы ШД и их устройство
- С переменным магнитным сопротивлением. На статичной части таких ШД есть несколько полюсов. Ротор – зубчатой формы из мягкого материала, ненамагниченный. Если, к примеру, статор 6-полюсный, а ротор из 4 зубцов, то независимых обмоток на двух противоположных статорных полюсах будет 3. Шаг мотора будет равен 30°.
- С постоянными магнитами в роторе. Прямолинейные полюсы параллельны оси двигателя. Поскольку магнитный поток мощнее, крутящий момент на порядок выше, чем в ШД первого типа. Шаг такого мотора – от 7,5 до 15°.Может быть от 24 до 48 шагов на оборот.
- Гибридные ШД (ГШД). Установка зубцов в направлении оси сокращает величину шага. Крутящий момент и скорость возрастают. Обычно бывает от 100 до 400 шагов за оборот при угле шага 0,9-3,6°. Наиболее распространен биполярный ШД nema. Только в гибридных ШД применяется режим микрошага. Управление обмотками независимое. Плавность вращения подвижной части повышена. Возможны 51200 шагов за оборот. Точность позиционирования оптимальна. Обеспечивается более низкая магнитная проводимость зазоров относительно удельной проводимости зубцов.
ШД по типу обмоток подразделяются на:
- Биполярные с одной обмоткой для каждой фазы. Переплюсовка драйвером изменяет направление магнитного поля.
- Униполярные. В каждой фазе одна обмотка, но из середины каждой обмотки имеется отвод. Направление поля меняется за счет переключения используемой половины обмотки. Драйвер имеет только 4 ключа.
Характеристики ШД
- Крутящий момент. Его измеряют в кг-сила-см. Чем выше показатель зависимости вращательного момента от частоты вращения, тем быстрее ШД набирает обороты после включения.
- Удерживающий момент или сила блокирования ротора статором при включенном, но не запущенном моторе. Его измеряют в унциях-на-дюйм.
- Тормозящий или стопорный момент, т.е. сила, которая удерживает ротор от вращения без подачи тока. В ГШД эта величина в 10 раз меньше величины силы удерживания ротора от вращения при полной подаче тока. Измеряется в унциях-на-дюйм.
- Номинальное напряжение, зависящее от индуктивности обмоток. Указывается в вольтах. По нему определяют оптимальное напряжение для подачи в мотор. Наилучшее напряжение превышает номинальное. Превышение силы подаваемого тока ведет к перегреву и поломке двигателя. При недостаточном напряжении он не запустится. Оптимальную силу тока определяют по формуле U = 32 x√ L. L – индуктивность обмотки, а U – искомое значение.
- Диэлектрические испытания. По максимальному напряжению, которое выдерживает обмотка в течение определенного времени, определяют сопротивление мотора перегрузкам.
- Момент инерции ротора – это скорость разгона ШД, которую измеряют в грамм-квадратных см.
- Число полных шагов за оборот. Чем оно больше, тем мощнее и быстрее мотор.
- Длина корпуса без учета вала и общая масса или вес изделия. По габаритам и массе определяют, когда нужен компактный двигатель, а когда – крупнее и мощнее.
К примеру, в ШД PL57h51 PL57 – ширина-высота (диаметр) по квадратному фланцу 57 мм, h51 – длина двигателя без вала, равная 41 мм. Диаметр двигателя влияет на все его моменты больше, чем длина.
Инкодеры, драйверы и подключение
Специальные драйверы подключают к компьютерному LTP-порту и посредством их управляют ШД. Драйвер – это практически блок управления ШД. В шаговых двигателях для ЧПУ к драйверу присоединяют 4 вывода ШД и управляющие провода с контроллера ЧПУ, и плюс и минус с блока питания. Поступая в драйвер, сигналы контроллера управляют переключением ключей силовой схемы питающего напряжения. Через эти ключи питающее напряжение идет на двигатель.
Максимальный выдаваемый на выводы для обмоток мотора ток нужного напряжения – основной критерий подбора драйвера. Идущий с драйвера ток не должен быть ниже тока, потребляемого мотором. Параметры выходного напряжения выставляются переключателями на драйвере.
В двигателе может быть от 4 до 6 проводов, и от их количества зависит порядок подключения ШД. Биполярные механизмы сочетаются только с 4-проводными двигателями.
На каждые 2 обмотки приходится 2 провода. Самые мощные 6-проводные моторы могут подключаться и к биполярным, и к униполярным устройствам, и в них на каждую обмотку приходится средний провод или центр-кран и 2 провода. В униполярных моторах на каждую обмотку приходятся 3 провода. Два из них подсоединяют к транзисторам, а центр-кран – к источнику питания.
В 5-проводных ШД центральные провода вместе с остальными входят в общий кабель. Предпочтительно найти средний провод и соединить его с другими проводниками.
Датчики, подающие сигналы программному обеспечению, называют энкодерами и часто применяют с ШД. Энкодер нужен, когда налицо нелинейная зависимость от количества шагов.
Области использования, достоинства и недостатки
Шаговые двигатели для ЧПУ широко применяются в координатных столах и системах автоматизации. Панелям управления, программирования и станкам с ЧПУ не обойтись без ШД.
ШД – достойная альтернатива серводвигателю, поскольку, в отличие от него:
- Хорошо работает при весьма разнообразных нагрузках.
- Имеет постоянный угол поворота и стандартизированные габариты.
- Имеет низкую стоимость.
- Прост в монтаже и эксплуатации, долговечен и надежен.
- Пропуская шаги, не сгорает при крайне высоких оборотах.
Тем не менее, ШД уступает серводвигателю в том, что:
- У него мал КПД и велико энергопотребление.
- Увеличение частоты оборотов резко снижает крутящий момент.
- Мощность слишком мала для таких габаритов и веса.
- Велик нагрев двигателя при работе.
- Мотор слишком шумит на высокой и средней частотах.
Шаговый двигатель
— как работает шаговый двигатель?
Вы можете прочитать наше знаменитое Руководство по основам работы с шаговыми двигателями на одной странице здесь или перейти к любой главе, щелкнув ссылки в раскрывающемся меню справа.
Раздел 1: Теория двигателя
Шаговый двигатель — это преобразователь постоянной выходной мощности, где мощность определяется как крутящий момент, умноженный на скорость. Это означает, что крутящий момент двигателя обратно пропорционален скорости двигателя. Чтобы понять, почему мощность шагового двигателя не зависит от скорости, нам нужно сконструировать (образно говоря) идеальный шаговый двигатель.
Идеальный шаговый двигатель имел бы нулевое механическое трение, его крутящий момент был бы пропорционален ампер-виткам, а его единственной электрической характеристикой была бы индуктивность. Ампер-витки просто означает, что крутящий момент пропорционален количеству витков провода в статоре двигателя, умноженному на ток, проходящий через эти витки провода.
Каждый раз, когда вокруг магнитного материала, такого как железо в статоре двигателя, есть витки провода, он будет иметь электрическое свойство, называемое индуктивностью.Индуктивность описывает энергию, запасенную в магнитном поле каждый раз, когда ток проходит через эту катушку с проволокой.
Индуктивность (L) имеет свойство, называемое индуктивным реактивным сопротивлением, которое для целей данного обсуждения можно рассматривать как сопротивление, пропорциональное частоте и, следовательно, скорости двигателя.
По закону Ома ток равен напряжению, деленному на сопротивление. В этом случае мы заменяем сопротивление индуктивным сопротивлением в законе Ома и делаем вывод, что ток двигателя обратно пропорционален скорости двигателя.
Поскольку крутящий момент пропорционален ампер-виткам (ток, умноженный на количество витков провода в обмотке), а ток обратно пропорционален скорости, крутящий момент также должен быть обратным скорости.
В идеальном шаговом двигателе, когда скорость приближается к нулю, его крутящий момент будет стремиться к бесконечности, в то время как при бесконечной скорости крутящий момент будет равен нулю. Поскольку ток пропорционален крутящему моменту, ток двигателя также будет бесконечным при нуле.
В электрическом отношении настоящий двигатель отличается от идеального в первую очередь наличием ненулевого сопротивления обмотки.Кроме того, железо в двигателе подвержено магнитному насыщению, а также имеет потери на вихревые токи и гистерезис. Магнитное насыщение устанавливает предел тока пропорционально крутящему моменту, в то время как вихревой ток и гистерезис (потери в стали) вместе с сопротивлением обмотки (потери в меди) вызывают нагрев двигателя.
Раздел 2: Основные сведения о кривой скорость-крутящий момент
В предыдущем разделе было показано, что крутящий момент двигателя изменяется обратно пропорционально скорости.Это естественная кривая скорости-момента двигателя. Ниже определенной скорости, называемой угловой скоростью, ток будет превышать номинальный ток двигателя, в конечном итоге до разрушительного уровня, когда скорость двигателя будет снижаться дальше. Это можно увидеть на рисунке 1.
Рисунок 1
Для предотвращения этого необходимо настроить привод на ограничение тока двигателя до его номинального значения. Поскольку крутящий момент пропорционален току, крутящий момент двигателя постоянен от нулевой скорости до угловой скорости.Выше угловой скорости ток двигателя ограничивается индуктивным сопротивлением двигателя.
Рисунок 2
Результатом является кривая скорость-крутящий момент, состоящая из двух частей, которая показывает постоянный крутящий момент от нулевой скорости до пересечения линии естественной нагрузки двигателя, называемой угловой скоростью, за которой двигатель находится в области постоянной мощности. Это показано на рисунке 2.
У настоящего шагового двигателя есть потери, которые изменяют идеальную кривую скорости-момента.Самый важный эффект — это вклад крутящего момента фиксации. Момент фиксации обычно указан в паспорте двигателя. Это всегда потеря, когда двигатель вращается, и мощность, потребляемая для ее преодоления, пропорциональна скорости. Другими словами, чем быстрее двигатель вращается, тем больше крутящий момент фиксации способствует потере мощности на выходном валу двигателя. Эта потеря мощности пропорциональна скорости и должна быть вычтена из идеальной плоской кривой выходной мощности после угловой скорости. Теперь это составляет практическую кривую скорость-крутящий момент.
Рисунок 3
Обратите внимание, как на Рисунке 3 выходная мощность уменьшается со скоростью из-за потери постоянного крутящего момента из-за крутящего момента фиксации и других потерь. Тот же эффект вызывает небольшое уменьшение крутящего момента со скоростью в области постоянного крутящего момента. Наконец, имеет место округление кривой крутящего момента на угловой скорости, потому что привод постепенно переходит от источника тока к источнику напряжения.Привод ограничивает ток двигателя ниже угловой скорости и, таким образом, является источником тока. Выше угловой скорости индуктивное реактивное сопротивление двигателя ограничивает ток, и привод становится источником напряжения, поскольку он подает на двигатель все напряжение источника питания.
Раздел 3: Нестабильность среднего диапазона
Шаговый двигатель очень резонансный, потому что это система масса-пружина. «Массовая» часть — это инерция ротора и нагрузки, а «пружинная» часть — это восстанавливающий момент магнитного поля, которое тянет ротор за собой.Из-за этого скорость отстает от крутящего момента на 90 градусов.
Привод является источником тока в области постоянного крутящего момента и не добавляет дополнительной задержки по фазе. Однако в области постоянной мощности привод является источником напряжения, поэтому он вносит дополнительную фазовую задержку на 90 градусов. Общее фазовое запаздывание теперь составляет 180 градусов, что является установкой для устойчивых и нарастающих колебаний двигателя. Это колебание обычно называют нестабильностью средней полосы или резонансом средней полосы.
Привод устраняет эту нестабильность путем добавления демпфирования второго порядка или вязкого демпфирования.Это демпфирование уменьшает общую фазовую задержку, поэтому двигатель не может поддерживать колебания, почти так же, как амортизаторы амортизируют подвеску масс-рессоры автомобиля. Это показано на рисунке 4.
На рисунке ниже показан эффект некомпенсированного среднечастотного резонанса. Хотя возможно ускорение через резонансную область, невозможно непрерывно работать с двигателем в диапазоне скоростей. Это связано с тем, что колебания, вызывающие остановку двигателя, достигают амплитуды, достаточной для остановки двигателя, от полсекунды до 10 секунд.
Рисунок 4
Раздел 4: Основы питания двигателя
Выходная мощность двигателя (скорость, умноженная на крутящий момент) определяется напряжением источника питания и индуктивностью двигателя. Выходная мощность двигателя пропорциональна напряжению источника питания, деленному на квадратный корень из индуктивности двигателя.
Если изменить напряжение источника питания, получится новое семейство кривых скорость-крутящий момент.Например, если напряжение источника питания увеличивается вдвое, создается новая кривая; кривая теперь имеет вдвое больший крутящий момент при любой заданной скорости в области 2. Поскольку мощность равна крутящему моменту, умноженному на скорость, двигатель теперь также вырабатывает в два раза больше мощности. Это показано на рисунке 5.
Рисунок 5
Рисунок 6
На рис. 6 показан эффект переключения двигателя с полной обмотки на полуобмотку при сохранении того же напряжения источника питания.Двигатель, подключенный к полуобмотке, обеспечивает вдвое большую мощность, чем подключение с полной обмоткой при заданном напряжении источника питания. Это связано с тем, что индуктивность полной обмотки в четыре раза выше индуктивности половинной обмотки.
Также обратите внимание на рисунок 5, что выходная мощность двигателя удваивается, когда напряжение источника питания удваивается для двигателей, подключенных последовательно или параллельно. Обратите внимание, что двигатель, подключенный параллельно, обеспечивает производительность, идентичную мощности двигателя, подключенного последовательно, при удвоенном напряжении источника питания.
На рис. 7 показано влияние установки тока двигателя на удвоенное номинальное значение. Это приведет к неправильному использованию двигателя, поскольку он будет рассеивать в четыре раза больше тепла, чем установка правильного значения тока. Фактическое увеличение крутящего момента на низкой скорости значительно меньше, чем в два раза из-за магнитного насыщения моторного железа.
Рисунок 7
Видно, что выходная мощность не увеличивается; двигатель просто достигает максимальной мощности на более низкой скорости, и все это происходит за счет четырехкратного увеличения нагрева двигателя.
Рекомендуется всегда устанавливать ток двигателя на номинальное значение, чтобы получить наилучшую плавность микрошага. Установка более высокого тока ухудшает линейность двигателя и вызывает сгруппирование микрошагов и сопутствующую низкоскоростную вибрацию.
Повышенная мощность двигателя при повышенном напряжении питания сопровождается повышенным нагревом двигателя; этот нагрев увеличивается быстрее, чем выходная мощность, и в конечном итоге устанавливает максимальную выходную мощность двигателя.То есть ограничивающий фактор мощности, которую может выдать двигатель, в конечном итоге определяется тем, сколько тепла он может безопасно рассеять.
Раздел 5: Подключение двигателя
Шаговые двигатели имеют четыре, шесть или восемь проводов; Старые двигатели могут иметь пять проводов, но здесь они не рассматриваются.
Четырехпроводные двигатели наиболее просты в подключении и не имеют вариантов подключения. Просто подключите одну обмотку к клеммам, обозначенным «Phase A» и «Phase / A», а другую обмотку — к клеммам с надписью «Phase B» и «Phase / B».Если неизвестно, какие провода к какой фазе относятся, просто используйте омметр и проверьте, какие провода имеют целостность. Те, которые имеют непрерывность, будут принадлежать к одной и той же фазе; если двигатель вращается в неправильном направлении при подключении, просто поменяйте местами «Фаза A» и «Фаза / A». Типичное четырехпроводное подключение двигателя показано на Рисунке 8.
Рисунок 8
Шестипроводные двигатели являются наиболее распространенными. Возможны два варианта подключения: полнообмоточный и полуобмоточный.Шестипроводный двигатель аналогичен четырехпроводному двигателю, за исключением того, что на каждой из двух обмоток имеется центральный отвод, всего шесть проводов. Для соединения половинной обмотки используется центральный отвод и один из оконечных проводов. Это показано на Рисунке 9.
Рисунок 9
Для соединения с полной обмоткой, как показано на Рисунке 10, центральный отвод игнорируется и используются оба концевых провода. Термин «полная обмотка» в точности эквивалентен «последовательному» соединению, в то время как «полуобмотка» практически идентична «параллельному» соединению.Выбор между ними зависит от приложения, что обсуждается позже; просто не забудьте установить ток привода ровно на половину номинального униполярного тока двигателя, если он подключен к полной обмотке, и установить его на номинальный униполярный ток, если он подключен к половинной обмотке.
Рисунок 10
Восьмипроводные двигатели примерно на 3% более эффективны при параллельном подключении, чем эквивалентные шестипроводные двигатели с полуобмоткой, но их гораздо сложнее подключать.Нет никакого преимущества при сравнении последовательного соединения с полнообмоточным соединением. Как и в шестипроводном двигателе, выбор между последовательным или параллельным подключением зависит от области применения. Не забудьте установить ток привода ровно на половину номинального тока параллельного двигателя (как показано на Рисунке 11) при использовании последовательного соединения, показанного на Рисунке 12.
Рисунок 11
Рисунок 12
Раздел 6: Источники питания
Выбор источника питания определяется напряжением, током и типом источника питания (т.е.е. переключение по сравнению с линейным, регулируемое по сравнению с нерегулируемым и т. д.). Безусловно, наиболее проблемным и сложным фактором является напряжение, о котором речь пойдет в последнюю очередь.
Самым простым фактором при выборе источника питания является его номинальный ток, который зависит от характеристик вашего двигателя. Блок управления двигателем всегда потребляет менее 2/3 номинального тока двигателя при параллельном подключении (или половинной обмотке) и 1/3 номинального тока двигателя при последовательном (или полном обмотке) подключении.Другими словами, для двигателя 6 А на фазу потребуется источник питания 4 А при параллельном подключении и источник питания 2 А при последовательном подключении. Если используется несколько двигателей и приводов, сложите текущие требования каждого из них, чтобы получить общий номинальный ток источника питания.
Рисунок 13
При использовании нескольких приводов от общего источника питания используйте отдельные провода питания и заземления для каждого привода и верните их к общей точке обратно на источнике питания.Это называется «звездообразным» распределением питания; никогда не используйте «гирляндное» распределение питания, когда провода питания и заземления для следующих приводов взяты от предыдущего.
Напряжение вашего источника питания полностью зависит от номинальной индуктивности вашего двигателя, которая, как мы узнали, переводится в количество витков провода в статоре. У каждой модели двигателя разная номинальная индуктивность и, следовательно, разное максимальное напряжение.Чтобы определить максимальное напряжение источника питания, используйте следующую формулу, указав индуктивность двигателя в миллигенри (мГн) в качестве значения L.
32 * КОРЕНЬ (L) = V MAX
Если вы используете несколько разных моделей двигателей на одном источнике питания, используйте наименьшее значение индуктивности в приведенной выше формуле. Это гарантирует, что ваши двигатели не будут перегреваться из-за слишком высокого напряжения.
Если для двигателя не указана индуктивность, обычно указывается номинальное напряжение каждой обмотки, которое будет очень низким.Приемлемый способ определения напряжения источника питания, если это единственная информация, которая у вас есть, — это умножить это число на любое число от 4 до 20. На рисунке 14 вы можете использовать напряжение источника питания от 8,8 В до 44 В при параллельном подключении. .
Рисунок 14
Нерегулируемого источника питания будет достаточно, и он рекомендуется для большинства приложений из-за его простоты. Если двигатель с большой инерционной нагрузкой быстро замедляется, он действует как генератор переменного тока и отправляет напряжение обратно на привод, который затем отправляет его обратно в источник питания.Поскольку многие регулируемые источники питания имеют схему защиты, это может привести к отказу или сбросу источника питания; однако, если питание не регулируется, оно просто будет поглощаться конденсатором фильтра.
Чтобы создать собственный блок питания, у вас должны быть три ключевых компонента: трансформатор, мостовой выпрямитель и конденсатор фильтра. Номинальный ток трансформатора должен быть достаточным для надлежащей работы всех двигателей, которые будут работать от него, используя приведенную выше формулу тока. Выходное напряжение постоянного тока будет равно 1.В 4 раза больше номинального переменного напряжения трансформатора вторичной обмотки. Например, вторичная обмотка трансформатора 24 В переменного тока обеспечит на выходе источника питания около 34 В постоянного тока. Номинальные значения напряжения и тока мостового выпрямителя должны превышать допустимые значения от источника питания. Наконец, необходимо рассчитать минимальный размер конденсатора фильтра. Для этого используйте следующее уравнение:
(80 000 * I) / V = C
Результат будет в микрофарадах для конденсатора, если значение «I» — это необходимые амперы тока, а «V» — выходное напряжение источника питания.При выборе конденсатора можно использовать любое значение, равное или превышающее расчетное значение. Обязательно используйте конденсатор с номинальным напряжением как минимум на 20% выше, чем выходное напряжение источника питания. Пример блока питания 68VDC 5A показан на рисунке 15.
Рисунок 15
Следует обратить особое внимание на то, будет ли напряжение питания соответствовать максимальному номинальному напряжению привода или приближаться к нему. Если двигатель будет быстро замедлять большую инерционную нагрузку с высокой скорости, необходимо принять меры для поглощения возвращенной энергии.Энергия, накопленная в импульсе нагрузки, должна удаляться во время замедления и безопасно рассеиваться. Из-за своей эффективности привод не имеет средств рассеивания этой энергии, поэтому он возвращает ее источнику питания. Фактически, вместо того, чтобы потреблять ток от источника питания, привод сам становится источником тока. Этот ток может заряжать конденсатор источника питания до разрушительного уровня напряжения.
Если от источника питания работает более одного привода, это не проблема, поскольку другой привод (и) будет поглощать этот ток для своих нужд, если только он не замедляется.В этом случае или для одного привода может потребоваться установить на блоке питания ограничитель напряжения в виде стабилитрона. Напряжение этого диода должно быть больше, чем максимальное ожидаемое напряжение источника питания, но достаточно низким для защиты привода. Хорошим выбором будет стандартное значение 82 или 91 вольт.
Раздел 7: Нагрев двигателя и напряжение питания
Существует две основные причины нагрева двигателя: потери в меди и потери в стали.Проще всего понять потери меди; это тепло, выделяемое током, проходящим через сопротивление, например током, проходящим через сопротивление обмотки двигателя. Часто это называется рассеянием «I 2 R».
Эта причина нагрева двигателя максимальна, когда двигатель остановлен, и быстро уменьшается по мере увеличения скорости двигателя, поскольку индуктивный ток обратно пропорционален скорости.
Вихретоковый и гистерезисный нагрев вместе называют потерями в стали.Первый вызывает токи в железе двигателя, а второй вызывается переориентацией магнитных доменов в железе. Вы можете думать об этом как о «нагреве трением», когда магнитные диполи в железе переключаются вперед и назад. В любом случае, оба вызывают основной нагрев мотора. Потери в стали зависят от переменного тока и, следовательно, от напряжения источника питания.
Как было показано ранее, выходная мощность двигателя пропорциональна напряжению источника питания, удвоение напряжения удваивает выходную мощность.Однако потери в стали опережают мощность двигателя, так как они нелинейно возрастают с увеличением напряжения источника питания. В конце концов, наступает момент, когда потери в стали настолько велики, что двигатель не может рассеивать выделяемое тепло. В некотором смысле, это естественный способ удержать кого-то от получения 500 л.с. от двигателя NEMA 23 при использовании источника питания 10 кВ.
Здесь важно представить концепцию перегрузки. Это соотношение между напряжением источника питания и номинальным напряжением двигателя.Максимальное значение, полученное эмпирическим путем, составляет 25: 1, что означает, что напряжение источника питания никогда не должно превышать 25-кратное номинальное напряжение двигателя или 32-кратный корень квадратный из индуктивности двигателя. Ниже приведен график измеренных потерь в стали для двигателя 4A, 3V. Обратите внимание на рисунок 16, как потери в стали варьируются от незначительных до основных причин нагрева в двигателе по сравнению с постоянными потерями в меди 12 Вт (4 А умноженные на 3 В).
Рисунок 16
Раздел 8: Точность и разрешение
Шаговые двигатели, как правило, используются в приложениях для позиционирования и управления скоростью без обратной связи.Датчик обратной связи не позволяет установить предельную точность системы. Следовательно, точность применения зависит от двигателя, а также от точности и поведения привода.
Посредством микрошага, демпфирования второго порядка и прецизионных опорных синусоидальных / косинусных токов привод избавил шаговый двигатель от присущих ему недостатков, чтобы сделать его кандидатом на применение в точных приложениях управления движением. Если пренебречь приводом, двигатель по-прежнему имеет характеристики, которые необходимо учитывать с точки зрения максимальной точности в любом приложении.
Шаговый двигатель — это механическое устройство, изготовленное с определенным допуском. Обычно стандартный двигатель имеет допуск неаккумулятивной ошибки +/- 5% относительно местоположения любой данной ступени. Это означает, что любой шаг на типичном двигателе с 200 шагами на оборот будет в пределах диапазона погрешности 0,18 градуса. Иначе говоря, двигатель может точно определять 2000 радиальных точек. По совпадению, это разрешение привода с 10 микрошагами.
Любое разрешение микрошагов выше 10, например 125, не дает дополнительной точности, только пустое разрешение.По аналогии, вольтметр с 6-значным дисплеем и точностью 1% будет иметь значимую информацию только в первых двух цифрах. Есть два исключения, оправдывающих более высокое разрешение: шаговый двигатель работает в приложении с обратной связью с энкодером высокого разрешения или приложение требует плавной работы на очень низких скоростях (менее 5 полных шагов в секунду).
Еще одним фактором, влияющим на точность, является линейность двигателя. Линейность двигателя относится к тому, как двигатель ведет себя между его порядковыми положениями шага.В идеале, шаговый двигатель на 1,8 градуса должен перемещаться точно на 0,18 градуса за каждый шаговый импульс, отправляемый на привод с 10 микрошагами. На самом деле, все шаговые двигатели демонстрируют некоторую нелинейность, то есть микрошаги сгруппированы вместе, а не распределяются равномерно на протяжении полного шага. Это имеет два эффекта: статическое положение двигателя не является оптимальным и возникают динамические низкоскоростные резонансы из-за циклического ускорения, когда микрошаги расходятся, и замедления, когда они сбиваются в кучу.На рисунке 17 показан двигатель с превосходной линейностью и двигатель с ужасной линейностью.
Наконец, статическая фрикционная нагрузка, приложенная к двигателю, влияет на точность. Остановленный двигатель с удерживающим моментом 100 унций / дюйм принципиально отличается от тормоза с таким же удерживающим моментом.
Рисунок 17
Тормоз вообще не будет вращаться, пока не будет превышен его удерживающий момент. Однако шаговый двигатель генерирует восстанавливающий крутящий момент только в том случае, если он смещен из исходного положения.Используя аналогию с тормозом, представьте, что выходной вал соединен с тормозом с помощью торсионной пружины; теперь при приложении нагрузки выходной вал должен быть смещен в сторону, чтобы приложить крутящий момент к тормозу.
Когда к шаговому двигателю приложен поперечный крутящий момент, достаточный для преодоления удерживающего момента, вал перейдет в следующее устойчивое положение, которое на четыре полных шага впереди или позади исходного, в зависимости от направления бокового крутящего момента. Пиковый восстанавливающий крутящий момент возникает на полный шаг вперед или назад от исходного положения, за пределами которого он ослабевает и меняет направление в положении на два полных шага, чтобы притягивать вал к месту на четыре полных шага впереди или позади исходного.
Связь между восстанавливающим моментом и углом ошибки вала приблизительно синусоидальная, как показано на рисунке 18.
Рисунок 18
Из этого можно приблизительно определить, что статическая нагрузка крутящего момента, равная 15 процентам удерживающего момента, смещает вал двигателя на одну десятую полного шага от начала координат.
Раздел 9: Выбор шагового двигателя и напряжения источника питания
Выбор шагового двигателя и напряжения источника питания полностью зависит от области применения.В идеале двигатель должен работать на максимальной скорости, необходимой для работы, и не более того.
Любой крутящий момент, превышающий то, что требуется для применения, связан с высокими затратами из-за ненужного нагрева двигателя. Превышение крутящего момента, превышающего разумный запас безопасности, никогда не будет использоваться, но влечет за собой штраф в виде слишком большого источника питания, напряжения привода и температуры двигателя.
Научитесь различать разницу между крутящим моментом и мощностью; высокий начальный крутящий момент на низкой скорости не означает эффективного использования двигателя.Обычно мощность является более важным показателем пригодности двигателя для конкретного применения. Чтобы определить это, вы должны смещать рабочую точку двигателя через зубчатую передачу, чтобы двигатель работал на максимальной мощности; обычно сразу после его угловой частоты.
Максимальная допустимая мощность на валу с приводом, работающим на 80 В постоянного тока и 7 А, составляет около 250 Вт, или одну треть лошадиных сил. В первую очередь это достигается с помощью двигателей NEMA 34 с двойным или тройным корпусом.
Двигатели NEMA 23 физически слишком малы, чтобы рассеивать результирующий шум, а двигатели NEMA 42 слишком велики, чтобы обеспечить надлежащее согласование импеданса; если их ток меньше предела привода 7 А, тогда напряжение обычно будет выше максимального напряжения 80 В постоянного тока и наоборот.
Фиксирующий момент в двигателе NEMA 42 значительно выше, чем в двигателях меньшего размера, и всегда представляет собой потерю, которую необходимо вычитать из потенциально доступной выходной мощности двигателя. Другими словами, выходная мощность двигателя NEMA 42 падает быстрее со скоростью, чем у двигателей меньшего размера. Двигатель NEMA 42 следует использовать только в том случае, если требуется высокий крутящий момент на низкой скорости, и нецелесообразно понижать передачу меньшего двигателя.
Эффективный двигатель, определяемый как самый маленький двигатель, достаточный для удовлетворения требований приложения, будет работать в горячем состоянии.Думайте о двигателе как о имеющем фиксированную эффективность преобразования энергии: некоторый процент входящей мощности будет преобразован в тепло, а остальная часть будет преобразована в механическую энергию. Чтобы обеспечить максимальную производительность двигателя, отходящее тепло должно быть меньше допустимого для двигателя. Обычно этот двигатель также будет работать сразу после угловой скорости.
Начнем с определения крутящего момента нагрузки в унциях / дюймах, включая крутящий момент, необходимый для ускорения нагрузки.Следующим шагом является определение максимальной скорости, с которой приложение должно работать с полными шагами в секунду, используя формулу ниже. RPI — это количество оборотов на дюйм после того, как двигатель проходит через трансмиссию, RPS — это количество оборотов в секунду, а PPS — это количество импульсов в секунду от вашего источника шаговых импульсов.
(ЖЕЛАТЕЛЬНОЕ IPM * RPI) / 60 = RPS
RPS * 200 = PPS
Умножьте значение PPS на количество унций / дюйм, определенное ранее, и разделите итоговое значение на 4506.Ответ будет заключаться в том, сколько ватт требуется двигателю, чтобы выдержать нагрузку от приложения.
Выбирая двигатель, выбирайте двигатель, мощность которого на 40% больше расчетной. Ниже приведен пример уравнения, выполненного для нагрузки, требующей 450 унций / дюйм с ходовым винтом 3 TPI и желаемым IPM 300.
(300 * 3) / 60 = 15
15 * 200 = 3000
(3000 * 450) / 4506 = 299 унций / дюйм
299 * 1.4 = 419 унций / дюйм
Как видите, для этого приложения вам понадобится двигатель с номинальной мощностью 419 унций / дюйм.
Geckodrive — ведущий производитель приводов с шаговыми двигателями в США. Наши продукты используются в различных отраслях промышленности. Хотите приобрести качественный драйвер шагового двигателя? Ознакомьтесь с нашей подборкой ведущих в отрасли контроллеров двигателей сегодня.
Техника управления | Основы крутящего момента шагового двигателя
Шаговый двигатель делит полный оборот на ряд равных шагов, что важно для многих промышленных двигателей и приложений управления движением.Положение двигателя можно заставить перемещаться и удерживаться на одном из этих этапов до тех пор, пока двигатель точно подобран для приложения в отношении крутящего момента и скорости. Удерживающий момент — это мера того, сколько вращающей силы требуется, чтобы вывести вал неподвижного шагового двигателя из положения. Удерживающий момент (T) — это произведение постоянного крутящего момента двигателя (KT) и тока (i), приложенного к обмоткам статора.
T = KTi
В большинстве приложений электронные драйверы управляют шаговыми двигателями.В них используется технология широтно-импульсной модуляции (ШИМ) для контроля тока статора и подачи надлежащего напряжения для достижения желаемого тока и крутящего момента. Когда двигатель неподвижен, драйверу нужно только использовать достаточно напряжения, чтобы преодолеть сопротивление обмоток статора (также известное как фазы двигателя). Это описывается законом Ома, который вычисляет напряжение как ток в амперах, умноженный на сопротивление в омах. Если напряжение увеличивается, увеличивается и ток, но если увеличивается сопротивление, ток уменьшается.
V = iR
Поскольку большинство высокопроизводительных шаговых двигателей имеют низкое фазное сопротивление, драйверу не требуется большое напряжение питания для удержания двигателя в нужном положении. В реальных приложениях двигатель не остается постоянно неподвижным; он используется для перемещения груза. Перемещение чего-либо с определенной скоростью требует наличия динамического крутящего момента на этой скорости. Шаговые двигатели не переключаются мгновенно из состояния покоя на заданную скорость. Они должны ускоряться так же, как автомобиль постепенно увеличивает скорость, когда водитель нажимает на педаль газа.Для более быстрого разгона автомобиля требуется больше газа. Шаговые двигатели аналогичны, следуя знаменитому закону Ньютона F = ma. Ниже приведена формула закона Ньютона, выраженная в единицах вращения, где крутящий момент (T) пропорционален инерции ротора и нагрузки (J) и угловому ускорению (A):
T = JA
Для управления большей нагрузкой или более быстрого ускорения требуется больший крутящий момент. Однако динамический крутящий момент шагового двигателя уменьшается с увеличением скорости, потому что, когда двигатель начинает двигаться, он становится генератором.Когда магнитное поле ротора перемещается между катушками статора, на клеммах двигателя появляется напряжение. Драйвер должен подать на двигатель дополнительное напряжение, чтобы преодолеть это напряжение, известное как обратная ЭДС, которое является произведением скорости двигателя (w) и постоянной напряжения (KE). Кроме того, катушки статора, как и все катушки, имеют индуктивность, которая сопротивляется изменению тока. Поскольку ток статора изменяется, чтобы ротор вращался, необходимо использовать большее напряжение, чтобы преодолеть индуктивность (L). Уравнение напряжения для двигателя в движении:
V = KEώ + iR + L (di / dt)
Драйвер ШИМ увеличивает напряжение, подаваемое на шаговый двигатель, чтобы поддерживать постоянными ток и крутящий момент.На какой-то скорости в блоке питания не хватит напряжения, и ток мотора начнет падать. Крутящий момент падает вместе с током. При использовании источника питания с более высоким напряжением динамический крутящий момент остается постоянным до более высокой скорости (см. Рисунок 1).
Процесс определения размеров приложения включает расчет требуемого крутящего момента и диапазона скоростей, необходимых для перемещения нагрузки. Например, если приложению требуется 80 унций-дюйм. крутящего момента до 10 оборотов в секунду (об / с), этот двигатель может использовать источник питания 24 В (см. рисунок 2).
Если нам нужно ехать дальше и быстрее, можно разогнаться до 80 унций-дюймов. при 20 оборотах в секунду. Для шагового двигателя потребуется источник питания 48 В (см. Рисунок 3).
Эрик Райс — разработчик приложений в Applied Motion Products. Он проработал в сфере управления движением 20 лет, специализируясь на шаговых двигателях, серводвигателях, приводах и средствах управления. Он получил степень в области электротехники в Иллинойском университете Урбана-Шампейн.
Эта статья появляется в приложении Applied Automation для Control Engineering и Plant Engineering .
— См. Другие статьи из приложения ниже.
Шесть распространенных ошибок, которых следует избегать при выборе и использовании шаговых двигателей
Описанные здесь ошибки исправлялись бесчисленное количество раз тысячами пользователей шаговых двигателей по всему миру. Избегайте этих ошибок с помощью представленных решений — и сделайте следующее приложение успешным.
Эрик Райс • Национальный директор по маркетингу | Прикладные продукты движения
Шаговые двигатели
предлагают отрасли автоматизации экономичный и простой метод цифрового управления движением в широком спектре приложений, включая упаковочное оборудование, 3D-принтеры, линии обработки и сортировки материалов, настольные станки с ЧПУ и многое другое.Они служат важными компонентами многих поворотных и линейных осей позиционирования.
Преимущества шаговых двигателей с точки зрения затрат и производительности заключаются в их простоте и способности точно позиционироваться в схемах управления без обратной связи от двигателя к контроллеру. Для получения оптимальных преимуществ производительности шаговой системы с открытым контуром требуется понимание того, как указать и установить шаговый двигатель в приложение. Ниже приведены шесть распространенных ошибок, которых пользователи шаговых двигателей, как новички, так и опытные, могут легко избежать.
«Характеристики крутящего момента шагового двигателя выше, чем я вижу на практике».
После расчета крутящего момента, необходимого для перемещения нагрузки в приложении, пользователь выбирает шаговый двигатель на основе (1) характеристики удерживающего момента шагового двигателя или (2) кривой скорость-крутящий момент. После установки и соединения с нагрузкой двигатель не развивает ожидаемый крутящий момент.
Первая ошибка заключается в использовании удерживающего момента в качестве меры производительности для определения шагового двигателя.Удерживающий момент определяет крутящий момент, который двигатель производит, когда поддерживает положение и не движется. Как правило, это плохой показатель крутящего момента, который двигатель создает при движении.
Когда шаговый двигатель начинает движение, создаваемый крутящий момент резко падает по сравнению со значением крутящего момента удержания даже после нескольких оборотов в минуту. По мере увеличения скорости крутящий момент падает еще больше. По этой причине не выбирайте шаговый двигатель, основанный только на удерживающем моменте. Вместо этого обратитесь к опубликованным кривым «скорость-крутящий момент».
Здесь показаны шаговые двигатели от Applied Motion Products с разной длиной стопки.
Вторая ошибка — непонимание природы кривых скорость-крутящий момент. Кривая скорость-крутящий момент представляет крутящий момент, при котором шаговый двигатель останавливается. Когда шаговый двигатель останавливается, ротор теряет синхронизацию со статором, и вал перестает вращаться.
Чтобы гарантировать, что шаговый двигатель продолжает вращаться и обеспечивает достаточный крутящий момент для перемещения нагрузки, оцените кривые скорость-крутящий момент, оценив запас прочности.Простой способ сделать это — представить линию, параллельную кривой «скорость-крутящий момент», примерно на 1/2–2/3 высоты опубликованной кривой. Эта воображаемая линия представляет величину крутящего момента, которую шаговый двигатель может надежно создать с минимальным риском остановки. См. Рисунок 1 (типичная кривая скорость-крутящий момент шагового двигателя) для получения дополнительной информации.
Рисунок 1 — типичная кривая скорость-крутящий момент шагового двигателя. В опубликованных данных от производителя показана только сплошная линия, которая указывает крутящий момент при остановке в зависимости от скорости.Пользователь должен оценить полезный диапазон крутящего момента, как показано пунктирной линией.
«Шаговый двигатель очень горячий; с этим должно быть что-то не так ».
Шаговые двигатели рассчитаны на работу в горячем состоянии. Наиболее распространенным классом изоляции, используемым в шаговых двигателях, является класс B, который рассчитан на работу при температуре до 130 ° C. Это означает, что температура поверхности шагового двигателя может достигать 90 ° C или более перед выходом из строя. Эта температура намного выше, чем человек мог бы коснуться, не обжигая кожу.По этой причине устанавливайте шаговые двигатели вдали от мест с высокой вероятностью контакта с людьми.
Шаговые двигатели
предназначены для работы при высоких температурах из-за их использования в системах управления без обратной связи. Поскольку шаговый двигатель без обратной связи работает без какой-либо обратной связи по току (или обратной связи по скорости или положению), ток, подаваемый приводом, является постоянным, независимо от требуемого крутящего момента. Чтобы получить максимальный крутящий момент от шаговых двигателей, производители указывают их с учетом изоляции класса B; Таким образом, номинальные значения тока предназначены для максимального увеличения крутящего момента без перегрева.Конечным результатом является то, что шаговые двигатели вырабатывают большой крутящий момент … но при этом они сильно нагреваются.
«Могу ли я использовать блок питания на 12 В для питания моего шагового двигателя и привода?»
Для любого типа электродвигателя, не только для шаговых, напряжение питания напрямую зависит от скорости двигателя. По мере того, как в систему подается более высокое напряжение, двигатель достигает более высоких скоростей. Номинальное напряжение питания, указанное для сервоприводов и двигателей постоянного тока, соответствует другим номинальным характеристикам, включая скорость, крутящий момент и мощность.Если для шагового двигателя указано номинальное напряжение, оно обычно не больше, чем сопротивление обмотки шагового двигателя, умноженное на номинальный ток. Это полезно для создания удерживающего момента, но очень мало используется при движении шагового двигателя.
Как и все электродвигатели, когда вал начинает двигаться, шаговый двигатель создает напряжение обратной ЭДС (BEMF), которое препятствует протеканию тока в обмотках. Чтобы обеспечить приемлемый крутящий момент, напряжение питания должно быть существенно выше, чем BEMF. Поскольку не существует жестких правил для определения величины напряжения питания, пользователи должны просматривать опубликованные кривые скорость-крутящий момент для данной комбинации шагового двигателя, привода и источника питания.
Напряжение питания, указанное на кривой скорость-крутящий момент, является важной информацией. Если игнорировать, например, при использовании источника питания 12 В, когда опубликованная кривая использует питание 48 В, двигатель не достигнет ожидаемого крутящего момента. См. , рис. 2 (две кривые скорость-крутящий момент для одного и того же шагового двигателя и комбинации привода) для получения дополнительной информации.
Рисунок 2 — две кривые скорости-момента для одной и той же комбинации шагового двигателя и привода. Отличается только напряжение питания. Темно-зеленая линия показывает крутящий момент срыва при напряжении питания 48 В.Светло-зеленая линия показывает момент остановки при напряжении питания 24 В. Питание 12 В приведет к еще более низкой кривой.
«Могу я запустить этот шаговый двигатель с парой выходов ПЛК? Зачем мне диск? »
Двухфазные шаговые приводы используют набор из восьми транзисторов, соединенных в H-мост. Для создания эквивалентного H-моста из выходов ПЛК потребуется восемь выходов. Некоторые двухфазные шаговые двигатели с шестью подводящими проводами работают всего с четырьмя транзисторами. Для этого вы можете использовать четыре выхода ПЛК для вращения шагового двигателя вперед и назад.Однако шаговый привод делает гораздо больше, чем просто устанавливает последовательность транзисторов в H-мосте.
Шаговые приводы регулируют ток в каждой фазе двигателя, используя ШИМ-переключение напряжения на шине. Как отмечалось в предыдущем разделе, посвященном напряжению, напряжение питания должно быть достаточно высоким, чтобы преодолеть BEMF и создать крутящий момент на скорости. Шаговые приводы с возможностями микрошага дополнительно уточняют логику переключения ШИМ для соотношения тока в каждой фазе в соответствии с синусоидальной волной, получая более точное позиционирование, чем основной угол шага шагового двигателя.Выходя за рамки самых простых шаговых двигателей, те, у которых есть генераторы траектории на борту, могут автоматически увеличивать и уменьшать скорость двигателя в соответствии с предустановленными значениями ускорения и замедления.
Использование выходов ПЛК для управления шаговым двигателем может быть интересным проектом для тех, кто хочет проанализировать, как работают шаговые двигатели. Для любого серьезного проекта по управлению движением вам понадобится хороший привод.
«Шаговый двигатель такой шумный… с ним, должно быть, что-то не так.”
Каждый раз, когда шаговый двигатель делает шаг, он издает небольшой звенящий шум, когда ротор устанавливается в нужное положение (подумайте о классической массе на пружине). Звон — это собственная резонансная частота двигателя, которая зависит от конструкции двигателя. Собственная резонансная частота усиливается, когда частота шагов двигателя приближается к ней или равна ей. Этот шум наиболее выражен, когда шаговый двигатель приводится в действие в полной последовательности шагов (самое низкое доступное разрешение; равно углу шага двигателя) и на низких скоростях, обычно в диапазоне от 1 до 5 оборотов в секунду.
Вопрос о шуме чаще всего возникает, когда пользователь впервые тестирует шаговый двигатель, когда двигатель не установлен и отсоединен от какой-либо нагрузки. В этом сценарии двигатель может свободно резонировать сколько угодно, без чего-либо, чтобы гасить резонанс.
К счастью, несколько простых шагов могут уменьшить резонанс:
Добавьте в систему механическое демпфирование, установив двигатель и подключив вал двигателя к нагрузке. Присоединение вала к нагрузке добавляет системе некоторую инерцию или трение… что, в свою очередь, изменяет или снижает собственную резонансную частоту двигателя.
Уменьшите угол шага с помощью микрошага. При микрошаге угол шага намного меньше с каждым шагом, и собственная резонансная частота возбуждается меньше.
Если ни один из этих шагов не работает, рассмотрите возможность использования шагового привода с антирезонансным алгоритмом, встроенным в его текущую логику управления.
«Мне нужен энкодер для работы шагового двигателя, верно?»
Нет, энкодер не требуется для работы шагового двигателя в режиме управления без обратной связи. Шаговые двигатели — единственный тип бесщеточных двигателей постоянного тока, которые точно и многократно позиционируют нагрузку с использованием управления без обратной связи.Другим двигателям нужна обратная связь по положению. Управление с обратной связью хорошо работает, когда:
- Задачи движения остаются неизменными со временем.
- Нагрузка не меняется.
- Требуемые скорости относительно низкие.
- Невыполнение задачи перемещения не приводит к критическому или опасному отказу машины.
Если приложение не соответствует указанным критериям, рассмотрите возможность введения обратной связи в систему, чтобы разрешить некоторый уровень управления с обратной связью.Добавление энкодера к системе шагового двигателя дает преимущества, начиная от базовых функций, которые по существу представляют собой управление без обратной связи, но с небольшими, но эффективными улучшениями, до управления с полностью замкнутым контуром, когда шаговый двигатель работает как часть системы сервоуправления. Обратитесь к поставщику шагового двигателя и привода для получения информации о предлагаемых ими вариантах обратной связи и управления с обратной связью.
Шаговые двигатели Applied Motion Products выпускаются в широком диапазоне типоразмеров — от NEMA 8 до NEMA 42 и выше.
Объяснение характеристик крутящего момента и скорости шагового двигателя
Шаговые двигатели имеют разные характеристики крутящего момента и скорости в зависимости от того, запускается / останавливается двигатель или уже работает. Эти характеристики изображены в виде двух кривых на диаграмме крутящего момента двигателя, и важно понимать разницу между этими кривыми и то, что каждая из них означает для работы двигателя. Но шаговый двигатель также может создавать крутящий момент, когда он , а не движется, и эти значения стационарного крутящего момента, называемые удерживающим крутящим моментом и фиксирующим крутящим моментом, также являются важными факторами, которые следует учитывать при определении размеров и выборе шагового двигателя.
Кривые крутящего момента для шагового двигателя разработаны с учетом конкретной комбинации двигатель-привод, рабочего напряжения и метода управления. Любые отклонения от заявленной комбинации мотор-привод и условий эксплуатации могут изменить характеристики крутящего момента и скорости системы.
Шаговый двигатель не может запускаться (или останавливаться) мгновенно в «диапазоне поворота» между кривыми втягивания и извлечения. Вместо этого он должен ускориться до этого рабочего диапазона (или замедлить его), чтобы избежать потери шагов.
Изображение предоставлено: Moons ’Industries
Кривая момента затяжки
Кривая момента при втягивании показывает диапазон условий (максимальные моменты при заданных скоростях), при которых двигатель может запускаться и останавливаться синхронно с входными импульсами — другими словами, без потери шагов. В любой точке на этой кривой или ниже, называемой областью «пуск / останов» или «самозапуск», двигатель может запускаться или останавливаться мгновенно (то есть без ускорения или замедления) без потери шагов.
Кривая крутящего момента при выдергивании
Также называемый «рабочий крутящий момент» или «динамический крутящий момент», крутящий момент отрыва — это максимальная нагрузка (крутящий момент), которую шаговый двигатель может создавать при вращении без потери шагов. При работе в точке, выходящей за пределы кривой крутящего момента отрыва, двигатель может заглохнуть.
Область между кривыми втягивания и вытягивания часто называют «диапазоном поворота ». В этом диапазоне двигатель не может быть немедленно остановлен или запущен — он должен быть запущен в области пуска / останова и ускорен до диапазона поворота, или он должен быть замедлен из диапазона поворота в область пуска / останова, а затем остановлен.
Удерживающий момент
Одним из полезных свойств шагового двигателя является его способность удерживать нагрузку на месте, когда катушки двигателя находятся под напряжением, из-за притяжения между ротором и статором. Это называется удерживающим моментом двигателя и представляет собой крутящий момент, необходимый для перемещения двигателя на один полный шаг, когда катушки находятся под напряжением, но ротор неподвижен. Удерживающий момент шагового двигателя выше, чем его рабочий крутящий момент, и ограничен в первую очередь величиной тока, который двигатель может выдержать.
Шаговые двигатели способны удерживать нагрузку на месте даже против внешней силы, когда двигатель неподвижен.
Изображение предоставлено: Oriental Motor U.S.A. Corp
Момент фиксации
Фиксирующий момент возникает, когда двигатель не находится под напряжением, то есть ток не течет через обмотки двигателя. Это происходит из-за сил притяжения между магнитами в роторе двигателя и статором. И постоянные магниты, и гибридные шаговые двигатели испытывают фиксирующий крутящий момент, но конструкции с переменным магнитным сопротивлением — нет.(Напомним, что в шаговых двигателях с переменным сопротивлением используется немагнитный ротор, поэтому нет притяжения между ротором и статором, когда двигатель не находится под напряжением.)
Фиксирующий крутящий момент снижает как идеальную мощность, так и идеальный крутящий момент, который может создать двигатель, причем эффект усиливается с увеличением скорости.
Изображение предоставлено: Geckodrive Motor Controls
Момент фиксации часто указывается в технических характеристиках двигателя и является важным фактором при выборе размера и выбора шагового двигателя, поскольку его необходимо преодолеть, прежде чем двигатель начнет двигаться.Величина мощности, необходимая для преодоления крутящего момента фиксации, пропорциональна скорости двигателя — чем быстрее двигатель вращается, тем более значительное влияние крутящего момента фиксации будет на фактический выходной крутящий момент двигателя. Но крутящий момент фиксации может быть полезен, когда двигатель останавливается, поскольку он противодействует импульсу движущегося ротора, поэтому более высокий крутящий момент фиксации помогает двигателю останавливаться быстрее.
Шаговые двигатели с высоким крутящим моментом
от 0,01 до 50 Нм от JVL
Серия шаговых двигателей, которые были разработаны JVL для использования со всем диапазоном драйверов и контроллеров шаговых двигателей JVL.Это шаговые двигатели с высоким крутящим моментом, специально разработанные для мини- и микрошаговых режимов.
|
|
Размер | Нм | |||||
20 мм (0.8 дюймов) | 0,01 — 0,03 Нм | Два мини-шаговых двигателя для приложений, где малый размер является обязательным. | ||||
= «http:> | 28 мм (1,1 дюйма) | 1,2–4,0 нм | Мини-шаговый двигатель для приложений, где малые габариты необходимы. | |||
43 мм (1,7 дюйма) | 0,12–0,8 нм (17,0 унций на дюйм) — (113,3 унций дюйма) | Серия шаговых двигателей с высоким крутящим моментом. | ||||
43 мм (1.7 дюймов) | 0,07–0,46 Нм (9,9 унций дюйма) — (65,14 унций дюйма) | Серия шаговых двигателей с высоким крутящим моментом с высокой точностью. | ||||
57 мм (2,3 дюйма) | 0.48 Нм — 2,6 Нм (68,0 унций) — (368,2 унций дюйма) | Серия шаговых двигателей с высоким крутящим моментом. | ||||
57 мм (2,3 дюйма) | 0,32–2,1 Нм (45,3 унции) — (297.4 унции на дюйм) | Серия шаговых двигателей с высоким крутящим моментом с высокой точностью. | ||||
20 — 57 мм (0,8 — 2,3) | 0,01 — 2,6 Нм (14,2 унции) — (368,2 унций дюйма) | Серия шаговых двигателей с высоким крутящим моментом с установленными энкодерами. | ||||
57 мм (2,3 — 3,2) | Серия шаговых двигателей с высоким крутящим моментом NEMA23, признанных UL. Также с энкодером и разъемами M12 | |||||
= «http:> | 57 мм (2.3 дюйма) | 1,1–2,0 нм (155,8 унций) — (283,2 унций дюйма) | Серия шаговых двигателей с высоким крутящим моментом для мойки или тяжелых промышленных условий | |||
= «http:> | 60 мм (2,4 дюйма) | 1.3 Нм — 3,0 Нм (184,1 унций) — (424,8 унций) | Серия шаговых двигателей с высоким крутящим моментом для мойки или тяжелых промышленных условий | |||
= «http:> | 87 мм (3,4 дюйма) NEMA34 | 5,0–9,2 Нм (708,1 унций) — (1302.8 унций на дюйм) | Серия шаговых двигателей с высоким крутящим моментом для мойки или тяжелых промышленных условий | |||
87 мм (3,4 дюйма) | 3,2 — 12,5 Нм | Серия шаговых двигателей с высоким крутящим моментом. | ||||
87 мм (3,4 дюйма) | 3–9 нм | Серия шаговых двигателей с высоким крутящим моментом с высокой точностью. | ||||
109 мм (4.3 дюйма) | 10–24 нм | Серия шаговых двигателей с высоким крутящим моментом. | ||||
134 мм (5,1 дюйма) | 27 Нм — 50 Нм | Серия шаговых двигателей с высоким крутящим моментом. | ||||
Обратите внимание: размеры в дюймах соответствуют стандарту Nema, размеры в миллиметрах — это фактический размер фланца.
Увеличение крутящего момента шагового двигателя без увеличения типоразмера
Шаговые двигатели обеспечивают точное управление положением без необходимости обратной связи, что обычно используется в схемах управления без обратной связи. Вал шагового двигателя обычно совершает дискретные угловые движения практически одинаковой величины, когда приводится в действие источником постоянного тока.Один цифровой импульс вызывает одно приращение углового перемещения шагового двигателя. По мере увеличения цифровых импульсов вращается шаговый двигатель. Определенное количество импульсов перемещает двигатель в точное положение.
Шаговые двигатели являются предпочтительной технологией для многих приложений управления движением из-за их упрощенного управления, отличного позиционирования и низкой стоимости. При работе в качестве устройств с разомкнутым контуром шаговые двигатели лучше всего подходят для приложений с более низкими скоростями, четко определенными нагрузками и повторяющимся движением. SH: Типоразмеры
Национальная ассоциация производителей электрооборудования (NEMA) ввела стандартизацию типоразмеров, чтобы упростить разумный выбор двигателей различных размеров.Шаговые двигатели классифицируются по размеру корпуса, например «размер 11» или «размер 23». Цифры типоразмеров указывают на размеры лицевой панели двигателя. Например, шаговый двигатель размера 11 имеет размер 1,1 × 1,1 дюйма. Лицевая панель, в то время как лицевая панель шагового двигателя 23 имеет размер примерно 2,3 × 2,3 дюйма. (56,4 × 56,4 мм).
Вот размеры шагового двигателя NEMA типоразмера 23. Дополнительные размеры двигателей включают 14, 17 и 34. Размер 24 является в некотором роде исключением, поскольку для него не существует формального определения NEMA. Он устанавливается как размер 23, но немного шире (около 4 мм), что позволяет использовать ротор и статор большего размера и примерно на 30% больший удерживающий момент.
Стандарты NEMA позволяют пользователям переключаться с одного производителя шагового двигателя на другого без необходимости значительного изменения монтажных кронштейнов, муфт и других монтажных компонентов. Однако два двигателя с одинаковым размером NEMA, но от разных производителей могут все же несколько отличаться. Длина вала и наличие плоской поверхности для использования с установочными винтами варьируются в зависимости от производителя. Стандарты NEMA также не определяют электрические характеристики, такие как количество выводных проводов или сопротивление обмотки. Прежде чем покупать шаговые двигатели другого производителя, внимательно изучите все технические характеристики.
Шаговые двигатели типоразмеров 8, 11 и 14 идеально подходят для применений, в которых мало места, например, для медицинских устройств, оборудования для автоматизации лабораторий, принтеров, банкоматов, оборудования для наблюдения и бытовой электроники. Шаговые двигатели большего размера часто используются в промышленных приложениях, таких как упаковочное оборудование, испытательное и измерительное оборудование, сборочное оборудование, оборудование для производства полупроводников и погрузочно-разгрузочное оборудование.
Шаговые двигатели с большим размером корпуса создают больший крутящий момент, чем двигатели меньшего размера.Хотя они увеличивают крутящий момент, эти более крупные двигатели не всегда помещаются в ограниченном пространстве. Однако, если основным ограничением пространства является диаметр двигателя, инженеры могут увеличить крутящий момент шагового двигателя в пределах заданного размера корпуса, увеличив длину двигателя. Чтобы построить шаговый двигатель с более высоким крутящим моментом, несколько секций ротора и статора «уложены» вместе, таким образом увеличивая длину. Шаговый двигатель генерирует больший крутящий момент за счет того, что он длиннее, но не шире или выше. Эффект от длины стопки двигателей размером 17 можно увидеть на близлежащем изображении.
Эти шаговые двигатели NEMA типоразмера 17 имеют разную длину стека. Длина штабеля увеличивается за счет добавления дополнительных секций ротора и статора. Это увеличивает крутящий момент при сохранении ширины, высоты и установочных размеров двигателя.
В таблице показаны типичные характеристики удерживающего момента (в единицах Ньютон-метров) для двигателей с различными размерами корпуса и длиной пакета. Различная длина стека в пределах одного размера корпуса дает инженерам гибкость при выборе двигателей для применения. Иногда достаточно места для более длинного двигателя, а в других случаях выгоднее использовать более короткий двигатель с большим размером корпуса.
Типичные значения удерживающего момента для различных размеров корпуса и длины стопки.
Шаговые двигатели со сверхвысоким крутящим моментом — еще один способ эффективного увеличения крутящего момента в пределах заданного размера. Они могут увеличивать удерживающий момент на 25–45% в шаговом двигателе, идентичном по размеру обычному двигателю. Таким образом, шаговые двигатели со сверхвысоким крутящим моментом избавляют от необходимости указывать большие размеры корпуса, чтобы получить достаточный крутящий момент для конкретного применения.
Усовершенствованная магнитная конструкция позволяет этим шаговым двигателям создавать больший крутящий момент за счет разницы в магнитной проницаемости, создаваемой зубьями ротора и статора.Добавление редкоземельных магнитов между зубьями улучшает изменение магнитной проницаемости.
Например, обычный шаговый двигатель типоразмера 34 может создавать удерживающий момент 5,9 Н · м. Версия того же двигателя со сверхвысоким крутящим моментом обеспечивает удерживающий момент до 9 Н · м. Для обычного двигателя для достижения такого же номинального крутящего момента потребуется двигатель на 31% длиннее.
Хотя крутящий момент и скорость двигателя являются критическими факторами при выборе лучшего шагового двигателя для приложения, не упускайте из виду важность размера, длины и типа корпуса двигателя.Слишком большой двигатель может тратить деньги или выделять слишком много тепла. Слишком маленький двигатель может не обеспечивать достаточный крутящий момент для надежного управления движением. Обратите внимание на длину стека и конструкции двигателей со сверхвысоким крутящим моментом, чтобы увеличить крутящий момент, когда переход на больший размер рамы невозможен. А в случае сомнений всегда полезно обсудить лучшие варианты для вашего применения с поставщиком двигателей.
Эрик Райс — директор по маркетингу компании Applied Motion Products.
Учебное пособие: шаговый двигатель против сервопривода
Это руководство поможет вам понять разницу между шаговыми и серводвигателями, а также как выбрать лучший двигатель для вашего приложения.Мы рассмотрим основы двигателя, включая конструкцию, ток, функции и характеристики, вопросы, которые нужно задать при выборе двигателя, примеры применения, ключевую терминологию и многое другое. Мы также предоставляем дополнительные ресурсы для получения дополнительной информации.
Основы двигателей: принцип работы шагового двигателя
Конструкция шагового двигателя
Большинство промышленных шаговых двигателей представляют собой гибридные шаговые двигатели, которые состоят из ротора с постоянным магнитом и электромагнитного статора с обмоткой.
Шаговый двигатель ТОК
Постоянный ток используется для питания магнитных катушек шагового двигателя.
Ток, подаваемый от привода, создает магнитное поле, которое используется для вращения вала двигателя. Ниже представлено базовое представление о том, как работает этот процесс.
1. Верхний электромагнит активируется, и зубья центрального зубчатого колеса выстраиваются соответственно.
2. Верхний электромагнит отключен, а правый включен.Ближайшие зубцы шестеренки подпрыгивают, чтобы выровняться с этим. Это вызывает ступеньку (например, поворот на 1,8 °).
3. Правый электромагнит отключен, а нижний включен. Зубья шестерни затем подпрыгивают, чтобы выровняться с нижним электромагнитом. Это вызывает еще один шаг.
4. Нижний электромагнит деактивируется и включается крайний левый. Зубья шестеренки подпрыгивают, чтобы выровняться с этим. Это вызывает еще один шаг. На двигателе с углом шага 1.8 °, для полного вращения требуется 200 шагов.
Другая информация
1. Микрошаг увеличивает количество шагов на оборот.
2. Увеличение тока увеличивает крутящий момент двигателя.
3. Чем выше частота шага, тем выше скорость двигателя.
4. По мере увеличения скорости двигателя обратная ЭДС может снизить крутящий момент двигателя.
5. Обратная связь по положению не требуется, но она не обязательна.
Краткое описание шагового двигателя
Постоянный ток создает магнитное поле.Это система постоянного тока с разомкнутым контуром. Ток поддерживается, когда двигатель находится в состоянии покоя.
Преимущества
• Простая конструкция / управление
• Обратная связь не требуется
• Превосходный крутящий момент на низкой скорости
• Превосходная плавность хода на низких оборотах
• Более низкая общая стоимость системы
Недостатки
• Крутящий момент уменьшается с увеличением скорости
• Постоянный ток независимо от требований
• Не могу реагировать на изменения — загрузка
забавный шаговый двигатель факт
В 1920 году началось фактическое применение шаговых двигателей, так называемых шаговых двигателей типа VR (Variable Reluctance), используемых военно-морским флотом Великобритании для управления позиционированием и дистанционного управления.
Основы двигателя: как работает серводвигатель
Конструкция двигателя SERVO
Сервопривод переменного тока состоит из трехфазного статора и ротора с постоянными магнитами. Кроме того, для правильного управления током необходима обратная связь двигателя, такая как резольвер или энкодер.
Серводвигатель ТОК
Трехфазный переменный ток используется для питания магнитных катушек серводвигателя.
При изменении тока в статоре изменяется магнитное поле трех фаз; заставляя постоянные магниты ротора совмещаться с соответствующей фазой.
Другая информация
1. Увеличение тока увеличивает крутящий момент двигателя.
2. Чем выше частота тока, тем быстрее будет вращаться двигатель.
3. Сервоприводы контролируют и регулируют ток двигателя для более точного управления крутящим моментом.
4. Для правильного управления током требуется обратная связь двигателя.
Краткое описание сервоприводов
Трехфазный переменный ток создает магнитное поле. Это замкнутая система, которая непрерывно контролирует положение относительно заданного положения и соответствующим образом регулирует ток.Тормоз двигателя необходим для удержания крутящего момента при нулевой скорости.
Преимущества
• Управление с обратной связью
• Более высокий крутящий момент при более высокой скорости
• Нижний подогрев электродвигателя
• Лучший выбор для систем с переменной нагрузкой
Недостатки
• Более сложное управление — требуется настройка
• Требуется обратная связь по положению
• Более высокая общая стоимость системы
fun servo fact
В автофокусе камеры используется точный сервомотор, встроенный в камеру, который корректирует положение объектива для повышения резкости расфокусированных изображений.
шаговый или сервопривод ?: выбираем мотор
выбор правильного мотора
Когда вы запускаете приложение управления движением, выбираете ли вы двигатель на основе критериев проектирования или привычки? Вы выбираете сервопривод, потому что это то, что вы всегда используете? Вы выбираете степпер только для простых приложений?
Этот раздел поможет вам понять вопросы, которые вы должны задать, чтобы найти лучший двигатель для применения.
вопроса
1.Какой груз мне нужно переместить?
2. С какой скоростью мне нужно бежать?
3. Меняется ли моя нагрузка во время движения?
4. Нужны ли мне какие-либо специальные функции, такие как удерживающий момент или ограничение крутящего момента?
5.Каков мой бюджет?
6. Какой двигатель лучше всего подходит для моего применения?
1. Какой груз мне нужно переместить? (крутящий момент)
Когда мы выбираем двигатель для приложения, нам нужно знать, какой крутящий момент он может выдать.Для этого мы используем кривую крутящего момента двигателя. Вот типичная кривая крутящего момента серводвигателя.
2. На каких скоростях мне нужно бежать? (Крутящий момент + скорость)
Часто считается, что серводвигатели превосходят шаговые двигатели аналогичного размера. Но зачастую это не так. Вот кривая крутящего момента шагового двигателя эквивалентного размера по сравнению с кривой крутящего момента сервопривода.
На высоких скоростях крутящий момент шагового двигателя приближается к нулю, в то время как серводвигатель обеспечивает постоянный крутящий момент во всем диапазоне скоростей.
3. Меняется ли моя нагрузка во время движения?
Серводвигатели
обладают дополнительной способностью обеспечивать пиковый крутящий момент в течение коротких моментов времени для преодоления колебаний нагрузки и более высокого ускорения двигателя.
4. Специальные функции: удерживающий момент
Шаговые двигатели
могут обеспечивать полный крутящий момент в состоянии покоя, когда обмотки находятся под напряжением, удерживая нагрузку против внешней силы, когда ротор не вращается — удерживающий момент . Эта функция делает шаговые двигатели хорошим выбором для случаев, когда необходимо удерживать нагрузку на месте.
4. Специальные функции: ограничение крутящего момента
Серводвигатели
могут управлять крутящим моментом двигателя посредством точного контроля тока, подаваемого на двигатель, и ограничивать его, так что конкретное значение крутящего момента не может быть превышено — ограничение крутящего момента . Благодаря преимуществам управления крутящим моментом можно выполнять многие приложения, требующие точного управления усилием при нажатии, вытягивании и скручивании.
5. Каков мой бюджет: стоимость шагового двигателя
Шаговые двигатели
обычно не требуют обратной связи, используют менее дорогие магниты и редко включают редукторы.Благодаря большому количеству полюсов и способности создавать удерживающий момент они потребляют меньше энергии при нулевой скорости. В результате шаговый двигатель обычно дешевле, чем сопоставимый серводвигатель.
5. Каков мой бюджет: расходы на серводвигатель
Серводвигатели
требуют обратной связи, используют более дорогие магниты и часто включают редукторы. Они также потребляют больше энергии при нулевой скорости. В результате серводвигатель обычно дороже, чем сопоставимый шаговый двигатель.
6.какой мотор лучше всего подходит для моего применения?
Управление двигателями сильно отличается при сравнении шагового двигателя с сервоприводом. Шаговый двигатель — это система с разомкнутым контуром, а сервопривод — это система с замкнутым контуром. Проверьте свое приложение, чтобы определить, предоставляет ли один метод управления функции, которые отличают его от другого.
При рассмотрении требований к приложению необходимо учитывать несколько параметров, и приведенная ниже таблица является хорошей отправной точкой, чтобы помочь разработчику выбрать более подходящую технологию.
когда выбирать шаговое решение
Рассмотрите возможность использования шагового двигателя, если ваше приложение соответствует любому из этих требований.
Высокий крутящий момент, низкая скорость
Короткие, быстрые, повторяющиеся движения
Требуется простое управление
Низкая скорость, высокая точность
Преимущества шагового двигателя
Прочная конструкция
Высокая надежность означает отсутствие необходимости в обслуживании
Настройка системы не требуется
Низкая стоимость системы
когда выбирать сервопривод
Рассмотрите возможность использования сервопривода, если ваше приложение удовлетворяет любому из этих требований.
Требуется высокая скорость
Профили динамического движения
Контроль приложенной силы
Преимущества сервопривода
Контроль крутящего момента
Может выполнять сложные команды движения
Может адаптироваться к изменениям нагрузки
Низкое энергопотребление
Примеры применения
шаговое приложение: настройка осей
Автоматическая регулировка роликов
Особенности: Производитель хочет автоматизировать настройку роликов.
Цель: сократить время переналадки и повысить повторяемость между различными производственными установками.
Требования к заявлению:
Интеграция в существующий PLC Control
Время цикла менее 1 минуты
Внесение микронастройки по запросу
Положение монитора
Необходимо удерживать позицию в состоянии покоя
Решение
Улучшенная плавность хода на низких скоростях и удерживающий крутящий момент
в состоянии покоя делают шаговый двигатель
лучшим выбором.
сервопривод: динамическое управление крутящим моментом
Укупорка для бутылок
Особенности: OEM-сборщику линий розлива и розлива необходим линейный и поворотный привод как часть обновления операции укупорки.
Цель: точно установить колпачок и сообщить о любых недостающих или неправильно установленных колпачках.
Требования к заявлению:
Интеграция в существующий PLC Control
Очень высокая пропускная способность
Колпачок предельный крутящий момент
Несколько товаров
Решение
Управление сервоприводом с обратной связью
позволяет лучше контролировать положение двигателя и контроль тока.
Ограничение крутящего момента сервопривода дает системе
возможность точно устанавливать колпачки для корректировки колпачка
по крутящему моменту.
AMCI Integrated Motion Solutions
Двигатель + привод + контроллеры
Семейства интегрированных двигателей
AMCI представляют собой комплексное решение, объединяющее двигатель, привод и контроллер в единый пакет, который обеспечивает максимально простую установку.
Ключевые термины
Замкнутый контур : Система, в которой выходной сигнал измеряется и сравнивается с входом.Затем мощность регулируется для достижения желаемого состояния. В системе движения датчик скорости или положения (или оба) используется для генерации сигналов коррекции путем сравнения с желаемыми параметрами
Удерживающий момент : Максимальная внешняя сила или крутящий момент, которые могут быть приложены к остановленному двигателю, находящемуся под напряжением, не вызывая непрерывного вращения двигателя.
Microstepping : метод управления, пропорциональный току в ветре шагового двигателя, чтобы обеспечить промежуточные положения между полюсами.
Открытый контур : Относится к системе движения, в которой не используются внешние датчики для подачи сигналов коррекции скорости или положения.
Номинальный крутящий момент : Способность двигателя создавать крутящий момент при заданной скорости. Это максимальный крутящий момент, который двигатель может передать нагрузке, и обычно указывается с помощью кривой крутящий момент / скорость.
Сервопривод : Система, состоящая из нескольких устройств, которые непрерывно отслеживают фактическую информацию, сравнивают эти значения с желаемым результатом и вносят необходимые исправления, чтобы минимизировать разницу.
Угол шага : угол поворота вала при получении пошаговой команды.