
Рахимов А.В. Примеры использования линейных электродвигателей
Рахимов Андрей Валерьевич
Ставропольский государственный аграрный университет
Библиографическая ссылка на статью:
Рахимов А.В. Примеры использования линейных электродвигателей // Современная техника и технологии. 2015. № 11 [Электронный ресурс]. URL: http://technology.snauka.ru/2015/11/7898 (дата обращения: 11.09.2020).
Линейным электродвигателем называется электрический двигатель с одним разомкнутым элементом магнитной системы, обмотка которого развернута. Обмотка создает магнитное поле, с которым взаимодействует второй элемент магнитной системы, выполненный как направляющая деталь, обеспечивающая перемещение подвижной части линейного электродвигателя [1]. Если провести классификацию конструкций линейных электродвигателей, то можно выделить несколько типов. Основные из них – синхронные, асинхронные, электромагнитные, магнитоэлектрические, магнитострикционные и пьезоэлектрические линейные двигатели [3, 7]. По принципу действия они схожи с электродвигателями, создающими вращательное движение. В основном это синхронные, асинхронные и линейные электродвигатели постоянного тока. В линейном электродвигателе существует две части: первичная – неподвижная, получившая название «статор», и вторичная – подвижная, получившая название «якорь». Якорь электродвигателя получает энергию от статора через магнитное поле.
По принципу действия они схожи с электродвигателями, создающими вращательное движение. В основном это синхронные, асинхронные и линейные электродвигатели постоянного тока. В линейном электродвигателе существует две части: первичная – неподвижная, получившая название «статор», и вторичная – подвижная, получившая название «якорь». Якорь электродвигателя получает энергию от статора через магнитное поле.
Рисунок 1 – Условная схема преобразования обычного электродвигателя в линейный: 1 –статор (индуктор), 2 ротор (реактивная полоса)
Линейный электродвигатель является основной частью прямого электропривода. Он создан для преобразования электрической энергии в энергию поступательного движения, т. е. без механической передачи. Такой электропривод состоит из средств управления и изменения скорости, что значительно упрощает конструкцию исполнительных органов и позволяет усовершенствовать различные технологические процессы [6, 8]. В линейном электродвигателе имеется, питаемый электрическим током, индуктор, который является первичным элементом, и специальная реактивная полоса – вторичный элемент (рисунок 1).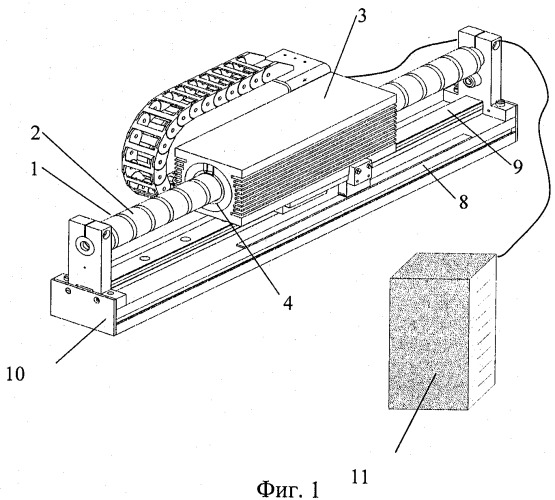 Эти элементы отделены воздушным зазором. Магнитная система линейного электродвигателя представлена обмоткой определенной длинны, которая необходима для создания движущегося вдоль нее магнитного поля. Это и есть неподвижный элемент. Подвижный элемент благодаря взаимодействию с магнитным полем, перемещается вдоль обмотки.
Эти элементы отделены воздушным зазором. Магнитная система линейного электродвигателя представлена обмоткой определенной длинны, которая необходима для создания движущегося вдоль нее магнитного поля. Это и есть неподвижный элемент. Подвижный элемент благодаря взаимодействию с магнитным полем, перемещается вдоль обмотки.
Линейные электродвигатели подразделяются на асинхронные и синхронные. В асинхронном линейном электродвигателе реактивная полоса, выполненная в виде бруска прямоугольного сечения без обмоток, закрепленная вдоль путепровода, над которым перемещается электровоз, перемещающий подвижную часть (индуктор) двигателя. Его магнитопровод выполнен с развернутыми многофазными обмотками, питаемыми от источника переменного тока. Благодаря взаимодействию магнитного поля индуктора с полем реактивной полосы, возникают силы, заставляющие перемещаться с ускорением индуктор относительно неподвижной реактивной полосы. Это перемещение происходит до тех пор, пока скорости перемещения индуктора и бегущего магнитного поля реактивной полосы не сравняются. Преимуществом такой конструкции является размещение более простой в изготовлении реактивной полосы.
Преимуществом такой конструкции является размещение более простой в изготовлении реактивной полосы.
Основные достоинства линейного электропривода – это отсутствие механической передачи и вращающихся частей, простота в эксплуатации, большой технический ресурс. К основным недостаткам можно отнести сложность устройства и высокую стоимость изготовления, плохие энергетические показатели, связанные с наличием больших воздушных зазоров в магнитной цепи и ее разомкнутостью.
Наиболее часто используются линейные двигатели в электрическом транспорте. Этому способствует ряд преимуществ. Прямолинейный характер движения подвижной части, подходящий для движения различных транспортных средств. Энергия магнитного поля непосредственно преобразуется в механическую, что позволяет добиться высокого КПД. Важное преимущество линейных электродвигателей состоит в независимости силы тяги от силы сцепления колес с путем. Это невозможно для обычных систем электрической тяги. Благодаря использованию линейных электродвигателей проскальзывание колес исключается, а скорости движения транспорта могут быть довольно высокими и ограничиваются лишь комфортабельностью движения, максимально допустимой скоростью вращения колес, и динамической устойчивостью транспорта и пути.
В приводе механизмов транспортировки грузов различных изделий также применяются линейные асинхронные двигатели. Как правило, это конвейеры, имеющие ленту из металла, которая проходит внутри статоров линейного двигателя, являясь при этом вторичным элементом. Использование линейного электродвигателя позволяет снизить предварительное натяжение ленты и устранить ее проскальзывание, повысить скорость и надежность работы конвейера.
В сваезабивных молотах, используемых при дорожных работах или строительстве, также применяется линейный электропривод. Статор электродвигателя перемещается вдоль стрелы в вертикальном направлении при помощи лебедки. Ударная часть молота является одновременно вторичным элементом двигателя. Для ее подъема двигатель включается таким образом, чтобы бегущее поле было направлено вверх. Когда ударная часть поднимется к крайнему верхнему положению, двигатель отключается, и она опускается вниз на сваю под действием силы тяжести. Иногда двигатель не отключается, а реверсируется, это позволяет увеличить ударную энергию. При заглублении сваи статор двигателя перемещается вниз с помощью лебедки. Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
При заглублении сваи статор двигателя перемещается вниз с помощью лебедки. Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
Благодаря появлению линейных электродвигателей, усовершенствованы многие технологические процессы, начиная от создания нового вида гидравлических насосов и заканчивая усовершенствованием машинного доения животных [2, 4, 5]. Развитие науки и техники позволяет упростить выполнение технологических процессов и в конечном итоге снизить издержки производства, что необходимо для повышения конкурентоспособности отечественных производителей товаров.
Библиографический список
- Гринченко В. А. Обоснование базовой конструкции линейного электродвигателя // Theoretical & Applied Science. – 2013. – Т. 1. – №11 (7). – С. 58-60.
- Гринченко В. А. Обоснование конструктивно-режимных параметров доильного аппарата с электропульсатором на основе линейного двигателя: дис.
 … канд. техн. наук: 05.20.01 – Технологии и средства механизации сельского хозяйства, 05.20.02 – Электротехнологии и электрооборудование в сельском хозяйстве. – Ставрополь, 2011. – 197 с.
… канд. техн. наук: 05.20.01 – Технологии и средства механизации сельского хозяйства, 05.20.02 – Электротехнологии и электрооборудование в сельском хозяйстве. – Ставрополь, 2011. – 197 с. - Никитенко Г. В., Гринченко В. А. Линейный двигатель возвратно-поступательного движения с регулированием амплитуды колебаний якоря // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. – Ставрополь: Агрус, 2009. – С. 407-410.
- Никитенко Г. В., Гринченко В. А. Результаты исследования линейного двигателя для вакуумного пульсатора доильного аппарата // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. – Ставрополь: Агрус, 2010. – С. 268-271.
- Никитенко Г. В., Гринченко В. А. Статика электромеханических процессов в линейном электродвигателе для привода пульсатора доильного аппарата // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. – Ставрополь: Агрус, 2011. – С. 199-202.
- Пат. 2357143 Российская Федерация, МПК F 16 К 31/06. Электромагнитный клапан / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. – № 2007141983/06; заявл. 12.11.07; опубл. 27.05.09.
- Пат. 2370874 Российская Федерация, МПК H 02 K 33/12. Линейный двигатель / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. – № 2008112342/09; заявл. 31.03.08; опубл. 20.10.09.
- Пат. 82990 Российская Федерация, МПК А 01 J 7/00. Регулятор вакуума / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. – № 2008150545/22; заявл. 19.12.08; опубл. 20.05.09.
 … канд. техн. наук: 05.20.01 – Технологии и средства механизации сельского хозяйства, 05.20.02 – Электротехнологии и электрооборудование в сельском хозяйстве. – Ставрополь, 2011. – 197 с.
… канд. техн. наук: 05.20.01 – Технологии и средства механизации сельского хозяйства, 05.20.02 – Электротехнологии и электрооборудование в сельском хозяйстве. – Ставрополь, 2011. – 197 с. – Ставрополь: Агрус, 2011. – С. 199-202.
– Ставрополь: Агрус, 2011. – С. 199-202.Все статьи автора «Kafedra PEESX»
Линейный асинхронный двигатель — Linear induction motor
Типичный трехфазный линейный асинхронный двигатель. «Первичный» сердечник (серый) имеет канавки, в которые друг на друга уложены обмотки. Алюминиевая пластина выше (не показана) служит «вторичной» и будет перемещаться относительно первичной обмотки при подаче трехфазного переменного тока.
Линейный асинхронный двигатель с поперечным потоком (здесь первичная обмотка находится вверху рисунка) и имеет два набора противоположных полюсов, расположенных рядом. (Изображение из патента США 3824414 Эрика Лэйтуэйта )
Линейный асинхронный двигатель ( LIM ) представляет собой переменный ток (переменный ток), асинхронный линейный двигатель , который работает по тем же принципам, что и общих других асинхронных двигателей , но , как правило , предназначены для непосредственного движения производят по прямой линии. Как правило, линейные асинхронные двигатели имеют конечную длину первичной или вторичной обмотки, что создает конечные эффекты, в то время как обычный асинхронный двигатель расположен в бесконечной петле.
Несмотря на свое название, не все линейные асинхронные двигатели производят линейное движение; некоторые линейные асинхронные двигатели используются для вращения большого диаметра, где использование непрерывной первичной обмотки было бы очень дорогостоящим.
Как и роторные двигатели, линейные двигатели часто работают от трехфазного источника питания и могут поддерживать очень высокие скорости. Однако есть конечные эффекты, которые уменьшают силу двигателя, и часто невозможно установить коробку передач, чтобы сбалансировать силу и скорость. Таким образом, линейные асинхронные двигатели часто менее энергоэффективны, чем обычные роторные двигатели для любой заданной требуемой выходной силы.
LIM, в отличие от своих вращающихся аналогов, может давать эффект левитации. Поэтому они часто используются там, где требуется бесконтактное усилие, где требуются низкие эксплуатационные расходы или где рабочий цикл невелик. Их практическое применение включает магнитную левитацию , линейные двигатели и линейные приводы. Они также использовались для перекачки жидких металлов.
История
Историю линейных электродвигателей можно проследить, по крайней мере, с 1840-х годов до работы Чарльза Уитстона в Королевском колледже в Лондоне, но модель Уитстона была слишком неэффективной, чтобы быть практичной. Возможный линейный асинхронный двигатель описан в патенте США 782312 (1905; изобретатель Альфред Цеден из Франкфурта-на-Майне) и предназначен для приведения в движение поездов или лифтов. Немецкий инженер Герман Кемпер построил рабочую модель в 1935 году. В конце 1940-х годов профессор Эрик Лейтвейт из Имперского колледжа в Лондоне разработал первую полноразмерную рабочую модель.
Возможный линейный асинхронный двигатель описан в патенте США 782312 (1905; изобретатель Альфред Цеден из Франкфурта-на-Майне) и предназначен для приведения в движение поездов или лифтов. Немецкий инженер Герман Кемпер построил рабочую модель в 1935 году. В конце 1940-х годов профессор Эрик Лейтвейт из Имперского колледжа в Лондоне разработал первую полноразмерную рабочую модель.
FEMM-моделирование поперечного сечения магнитной реки, окрашенного плотностью электрического тока
В одностороннем варианте магнитное поле может создавать силы отталкивания, которые отталкивают проводник от статора, левитируя его и неся вдоль направления движущегося магнитного поля. Лэйтуэйт назвал более поздние версии магнитной рекой . В этих версиях линейного асинхронного двигателя используется принцип, называемый поперечным потоком, при котором два противоположных полюса размещаются рядом. Это позволяет использовать очень длинные опоры и, таким образом, обеспечивает высокую скорость и эффективность.
строительство
Первичная обмотка линейного электродвигателя обычно состоит из плоского магнитного сердечника (обычно ламинированного) с поперечными прорезями, которые часто имеют прямой разрез с катушками, уложенными в прорези, причем каждая фаза дает переменную полярность, так что разные фазы физически перекрываются.
Вторичное часто представляет собой лист из алюминия, часто с железным опорной плитой. Некоторые модули LIM являются двухсторонними, с одной первичной обмоткой на каждой стороне вторичной, и в этом случае железная подкладка не требуется.
Существует два типа линейных двигателей: короткая первичная обмотка , где катушки усечены короче вторичной обмотки, и короткая вторичная обмотка , где проводящая пластина меньше. Короткие вторичные модули LIM часто наматываются как параллельные соединения между катушками одной и той же фазы, тогда как короткие первичные обмотки обычно наматываются последовательно.
Первичные обмотки ЛАД с поперечным потоком имеют ряд сдвоенных полюсов, расположенных бок о бок в поперечном направлении с противоположными направлениями намотки.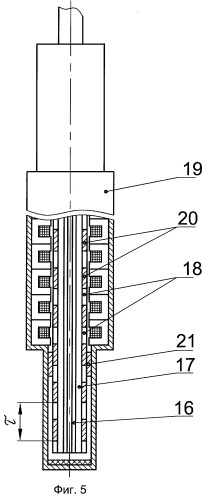 Эти полюса, как правило, производится либо с соответствующим образом вырезать пластины ламинированной подложки или серией поперечных U-образные сердечники.
Эти полюса, как правило, производится либо с соответствующим образом вырезать пластины ламинированной подложки или серией поперечных U-образные сердечники.
Принципы
Магнитное поле линейного двигателя движется влево мимо алюминиевого блока. Окрашивается наведенным электрическим током.
В этой конструкции электродвигателя сила создается линейно движущимся магнитным полем, действующим на проводники в поле. Любой проводник, будь то петля, катушка или просто кусок металлической пластины, помещенный в это поле, будет иметь вихревые токи, индуцированные в нем, таким образом создавая противоположное магнитное поле в соответствии с законом Ленца . Два противостоящих поля будут отталкивать друг друга, создавая движение, когда магнитное поле пронизывает металл.
- пsзнак равно2жs/п{\ displaystyle n_ {s} = 2f_ {s} / p}
где f s — частота питающей сети в Гц, p — число полюсов, а n s — синхронная скорость магнитного поля в оборотах в секунду.
Картина бегущего поля имеет скорость:
- vsзнак равно2тжs{\ displaystyle v_ {s} = 2tf_ {s}}
где v s — скорость линейного бегущего поля в м / с, а t — шаг полюсов.
Для скольжения s скорость вторичной обмотки линейного двигателя определяется выражением
- vрзнак равно(1-s)vs{\ displaystyle v_ {r} = (1-s) v_ {s}}
Силы
Тяга
Тяга, создаваемая как функция скольжения
Привод, создаваемый линейными асинхронными двигателями, чем-то похож на обычные асинхронные двигатели; движущие силы демонстрируют примерно аналогичную характеристическую форму относительно скольжения, хотя и модулируемую концевыми эффектами.
Существуют уравнения для расчета тяги двигателя.
Конечный эффект
В отличие от асинхронного двигателя круглого сечения, линейный асинхронный двигатель демонстрирует «конечные эффекты». Эти конечные эффекты включают потери производительности и эффективности, которые, как полагают, вызваны уносом магнитной энергии и потерями в конце первичной обмотки из-за относительного движения первичной и вторичной обмоток.
С короткой вторичной обмоткой поведение почти идентично роторной машине, при условии, что она имеет длину как минимум два полюса, но с коротким первичным снижением тяги, которое происходит при малом скольжении (ниже примерно 0,3), пока оно не станет восьми полюсов или больше.
Однако из-за концевых эффектов линейные двигатели не могут «работать на малой мощности» — обычные асинхронные двигатели могут управлять двигателем с почти синхронным полем в условиях низкой нагрузки. Напротив, конечные эффекты создают гораздо более значительные потери с линейными двигателями.
Левитация
Кривые левитации и силы тяги линейного двигателя
Вдобавок, в отличие от роторного двигателя, показана электродинамическая сила левитации , она равна нулю при нулевом скольжении и дает примерно постоянную величину силы / зазора при увеличении скольжения в любом направлении. Это происходит в односторонних двигателях, и левитация обычно не возникает, когда на вторичной обмотке используется железная опорная пластина, поскольку это вызывает притяжение, которое подавляет подъемную силу.
Спектакль
Линейные асинхронные двигатели часто менее эффективны, чем обычные роторные асинхронные двигатели; Концевые эффекты и часто присутствующий относительно большой воздушный зазор обычно уменьшают силы, возникающие при той же самой электрической мощности. Аналогичным образом, эффективность во время работы генератора (электрическое торможение / рекуперация) с линейным асинхронным двигателем была отмечена как относительно низкая из-за конечных эффектов. Большой воздушный зазор также увеличивает индуктивность двигателя, что может потребовать больших и более дорогих конденсаторов.
Однако линейные асинхронные двигатели могут избавить от необходимости в коробках передач и аналогичных трансмиссиях, и они имеют свои собственные потери; а практическое знание важности фактора качества может минимизировать влияние большего воздушного зазора. В любом случае потребление энергии не всегда является самым важным соображением. Например, во многих случаях линейные асинхронные двигатели имеют гораздо меньше движущихся частей и требуют очень низкого технического обслуживания.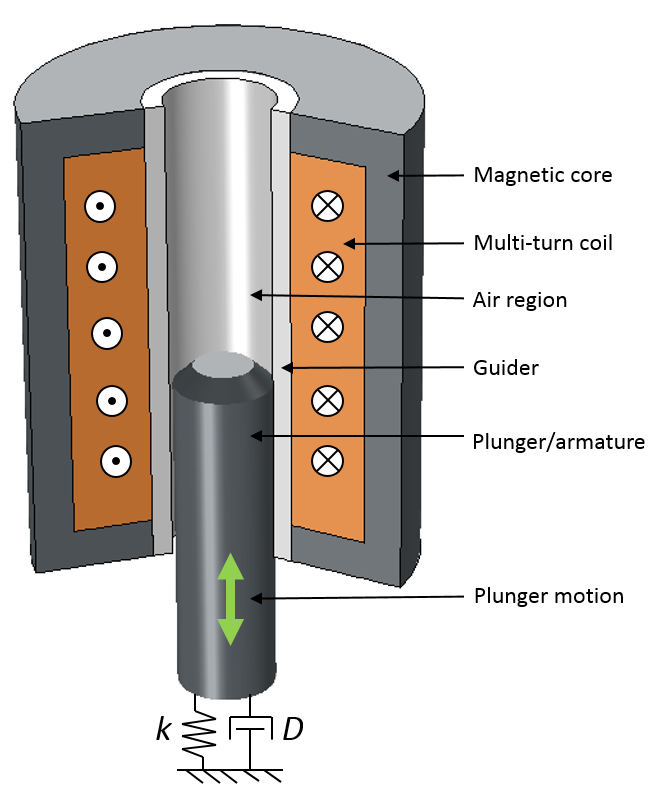 Кроме того, использование линейных асинхронных двигателей вместо вращающихся двигателей с поворотно-линейной передачей в системах управления движением обеспечивает более высокую полосу пропускания и точность системы управления , поскольку поворотно-линейные передачи вносят люфт, статическое трение и / или механическую податливость в система управления.
Кроме того, использование линейных асинхронных двигателей вместо вращающихся двигателей с поворотно-линейной передачей в системах управления движением обеспечивает более высокую полосу пропускания и точность системы управления , поскольку поворотно-линейные передачи вносят люфт, статическое трение и / или механическую податливость в система управления.
Использует
Линейный индукционный двигатель LIMTV для испытаний в 1973 году
Из — за этих свойств, линейные двигатели часто используются в магнитной подвеске в движение, как и в японской Linimo магнитной левитации поезда линии вблизи Нагоя .
Первой в мире коммерческой автоматизированной системой на магнитной подвеске был низкоскоростной шаттл на магнитной подвеске, который курсировал от терминала аэропорта Бирмингема до ближайшего международного железнодорожного вокзала Бирмингема в период с 1984 по 1995 год. Длина пути составляла 600 метров (2000 футов), а поезда «летели» на высоте 15 миллиметров (0,59 дюйма), левитировали электромагнитами и приводились в движение линейными асинхронными двигателями. Он проработал почти одиннадцать лет, но проблемы с устареванием электронных систем сделали его ненадежным в последующие годы. Один из оригинальных вагонов сейчас выставлен на выставке Railworld в Питерборо вместе с паровозом RTV31 .
Он проработал почти одиннадцать лет, но проблемы с устареванием электронных систем сделали его ненадежным в последующие годы. Один из оригинальных вагонов сейчас выставлен на выставке Railworld в Питерборо вместе с паровозом RTV31 .
Однако линейные двигатели были использованы независимо от магнитной левитации, таких как Токио «s Линия Оэдо . Innovia Метро Бомбардье является примером автоматизированной системы , которая использует LIM движение вперед. Самая протяженная система скоростного транспорта , в которой используется такая технология, — это метро Гуанчжоу, протяженность которого составляет около 130 км (81 милю) с использованием передвижных поездов метро LIM по линиям 4 , 5 и 6 . Они также используются Tomorrowland Transit Authority PeopleMover в Tomorrowland в Волшебном королевстве на курорте Walt Disney World Resort в Бэй-Лейк , Флорида, недалеко от Орландо , Флорида.
Линейные асинхронные двигатели также используются в некоторых американских горках . В настоящее время это все еще непрактично для уличных трамваев , хотя теоретически это можно сделать, закопав его в канале с прорезями.
Поезда AirTrain JFK двигаются с помощью алюминиевой индукционной ленты, помещенной между рельсами.
Помимо общественного транспорта, вертикальные линейные двигатели были предложены в качестве подъемных механизмов в глубоких шахтах , и использование линейных двигателей в приложениях управления движением растет . Они также часто используются на раздвижных дверях, например, в трамваях с низким полом, таких как Alstom Citadis и Eurotram .
Также существуют двухосные линейные двигатели. Эти специализированные устройства использовались для обеспечения прямого движения по оси X — Y для точной лазерной резки ткани и листового металла, автоматизированного черчения и формирования кабеля. Кроме того, линейные асинхронные двигатели с цилиндрической вторичной обмоткой использовались для обеспечения одновременного линейного и вращательного движения для монтажа электронных устройств на печатных платах.
Большинство используемых линейных двигателей — это LIM (линейные асинхронные двигатели) или LSM (линейные синхронные двигатели). Линейные двигатели постоянного тока не используются, так как они дороже, а линейный SRM имеет низкую тягу. Таким образом, для длительных пробегов на тяговых усилиях предпочтительнее использовать LIM, а для краткосрочных — LSM.
Линейные двигатели постоянного тока не используются, так как они дороже, а линейный SRM имеет низкую тягу. Таким образом, для длительных пробегов на тяговых усилиях предпочтительнее использовать LIM, а для краткосрочных — LSM.
Схема асинхронного двигателя ЭМАЛС
Линейные асинхронные двигатели также использовались для запуска самолетов, система Westinghouse Electropult в 1945 году была ранним примером, а электромагнитная система запуска самолетов (EMALS) должна была быть поставлена в 2010 году.
Линейные асинхронные двигатели также используются в ткацких станках, магнитная левитация позволяет бобинам плавать между волокнами без прямого контакта.
Первый безканатный лифт, изобретенный ThyssenKrupp, использует линейный индукционный привод.
Смотрите также
Ссылки
Достоинства и недостатки линейного двигателя
Страница 4 из 6
Достоинствами линейных асинхронных двигателей, используемых в качестве двигателя транспортных средств, являются:
отсутствие скользящих электрических контактов, вращающихся деталей и зубчатых колес; из-за отсутствия в приводе зубчатой передачи эксплуатационные расходы могут быть снижены на 25%;
отсутствие ограничений, обусловливаемых сцеплением колес с рельсами;
уменьшение массы двигателя, установленного на вагоне, связанное с тем, что элемент, играющий роль вторичного элемента, установлен на полотне дороги, однако в отличие от двигателей с вращающимися частями скорость ротора относительно статора не может быть повышена путем применения зубчатых колес. Это способствует увеличению веса линейного двигателя с продольным потоком по сравнению с эквивалентным двигателем с вращающимися частями, установленным на обычном вагоне. Следует сказать, что в связи с изобретением линейного двигателя с поперечным потоком этот недостаток несколько смягчается·;
Это способствует увеличению веса линейного двигателя с продольным потоком по сравнению с эквивалентным двигателем с вращающимися частями, установленным на обычном вагоне. Следует сказать, что в связи с изобретением линейного двигателя с поперечным потоком этот недостаток несколько смягчается·;
улучшение тепловых характеристик, объясняемое тем, что работающий двигатель удаляется от нагреваемой им части реактивной шины;
отсутствие ограничений, накладываемых предельно допустимой окружной скоростью вращающихся деталей;
при экстренном торможении не возникает проблем. Чтобы затормозить вагон, надо поменять направление бегущего магнитного поля переключением двух фаз или питать обмотки линейного двигателя постоянным током, а также можно использовать рекуперативное торможение. Для этого необходимо снижать частоту питания, чтобы синхронная скорость была меньше скорости вагона. В этом случае линейный двигатель будет работать в режиме генератора [113];
двигатель бесшумный, не загрязняет воздух [122].
Линейному двигателю присущи следующие недостатки:
применение линейного двигателя связано с недостаточным использованием габарита подвижного состава;
увеличение стоимости из-за необходимости выполнения реактивной шины из цветного металла;
относительно низкий к.п.д. и коэффициент мощности; необходимость выполнения поперечной направляющей системы; трудность обеспечения прохождения кривых участков пути и стрелочных переводов;
необходимость обеспечения питания трехфазным током при переменных напряжениях и частоте [113, 154];
необходимо поддерживать малый зазор между неподвижным и подвижным элементами двигателя [122].
Есть еще одна проблема, которая присуща всем высокоскоростным видам электрического транспорта, — это проблема токосъема при высоких скоростях. Этим вопросом занимаются во многих странах мира [196, 197].
Все указанные недостатки являются недостатками конструкций и могут быть устранены по мере дальнейших разработок, а к. п.д. и cosφ зависят от особенностей линейного асинхронного двигателя.
п.д. и cosφ зависят от особенностей линейного асинхронного двигателя.
Магнитные поля в тяговых линейных двигателях отличаются от магнитных полей реактивных асинхронных двигателей в силу ряда обстоятельств. Одни из них связаны с различием в параметрах (например, в десятки раз больший зазор в магнитной системе линейного двигателя) и отражаются на количественной стороне явлений, другие связаны с особенностями конструкции линейного двигателя и вызывают новые физические явления в машине.
Отметим важнейшие из них.
Индуктор тягового линейного двигателя имеет конечную длину в направлении бегущего магнитного поля, которое как бы возникает на одном и исчезает на другом конце сердечника индуктора. Эту особенность характеризуют как «разомкнутость» магнитной системы линейного двигателя. Она, в частности, вызывает несимметрию токов в обмотках индуктора и пульсирующую составляющую магнитного поля индуктора [21, 168]. Пульсацию магнитного поля можно уменьшить при помощи компенсирующих катушек или полностью устранить при помощи новой конструкции магнитной системы линейного двигателя [21, 126, 154].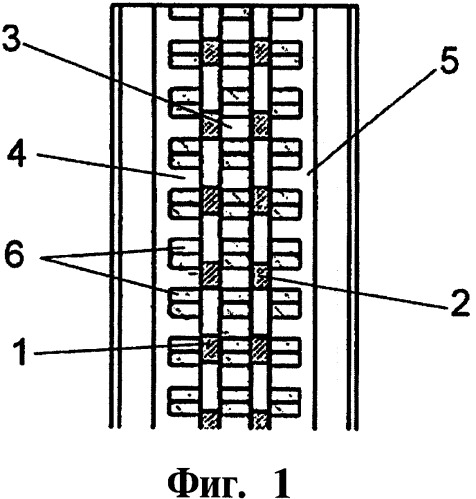 Это явление называется первичным продольным краевым эффектом.
Это явление называется первичным продольным краевым эффектом.
Отдельные участки реактивной шины последовательно входят в магнитное поле движущегося индуктора и затем выходят из этого поля. Процессы «входа-выхода» вызывают ряд новых, характерных и неустранимых явлений, совокупность которых называют вторичным продольным эффектом. Токи, наводимые в участках реактивной шины, определяются изменением магнитных потоков, сцепленных с контурами токов на этих участках. Изменение в потокосцеплениях вызывается как перемещением поля (скольжением) индуктора относительно шины со скоростью V=SV, так и процессами «входа» участков реактивной шины в магнитное поле индуктора и последующим их «выходом» из этого поля. Соответственно с этим токи в шине могут быть подразделены на токи скольжения, создающие тяговые усилия линейного двигателя, и вихревые токи, связанные с установлением и исчезновением магнитного поля в участках шины при их проходе через зазор индуктора.
Магнитные поля индуктора подразделяются на главное поле и на боковые и торцевые поля рассеяния. Последние являются пульсирующими полями. Явление вторичного краевого эффекта заключается в том, что в проводящем вторичном элементе не может сразу, мгновенно возникнуть магнитный поток. Во вторичном элементе возникает мгновенно электрическое поле, и токи, создаваемые этим полем, стремятся создать противопоток, в результате чего на входе резко падает индукция.
Последние являются пульсирующими полями. Явление вторичного краевого эффекта заключается в том, что в проводящем вторичном элементе не может сразу, мгновенно возникнуть магнитный поток. Во вторичном элементе возникает мгновенно электрическое поле, и токи, создаваемые этим полем, стремятся создать противопоток, в результате чего на входе резко падает индукция.
Аналогичная картина на выходе, только там токи во вторичном элементе стараются препятствовать уменьшению потока, и магнитное поле выносится за конец индуктора. Это явление тем ярче выражается, чем выше синхронная скорость.
Описанные краевые эффекты более или менее подробно анализированы в литературе [1, 6, 7, 21, 26, 31-33, 75, 76, 83, 97, 101, 120, 125, 129, 130, 141, 146, 159, 170-173]. Одновременно и в Японии [141], и в СССР, в Ленинградском политехническом институте и в ВЭлНИИ, были получены результаты, которые не объясняются ранее разработанной теорией вторичного продольного эффекта [204—206].
Лабораторный макет тягового линейного двигателя был разработан ВЭлНИИ и изготовлен на Новочеркасском электровозостроительном заводе. Все физические процессы в нем протекали, как в реактивном линейном двигателе, и было обеспечено удобство исследований. Он состоит из индуктора с двойным сердечником 1 (рис. 14), несущим обмотку 2 и установленным на раму 3 так, что зазор между сердечниками может регулироваться в пределах 20-50 мм. Функции реактивной шины в макете выполняет реактивный диск 4 из дюралюминия, насаженный на вал нагрузочной машины постоянного тока. Первый вариант сердечников имел среднюю длину 860 мм при ширине 120 мм. На сердечнике уложена шестиполюсная трехфазная обмотка.
Особенностью данного исполнения макета тягового линейного двигателя, отличающей его от аналогичных установок, является дугообразная форма сердечников индуктора. Этим обеспечивается соответствие траекторий бегущего магнитного поля индуктора и перемещений в нем элементов вращающегося реактивного диска, следствием чего является соответствие процессов макета линейного тягового двигателя данного исполнения таковым в реальном тяговом двигателе с поступательным движением элементов.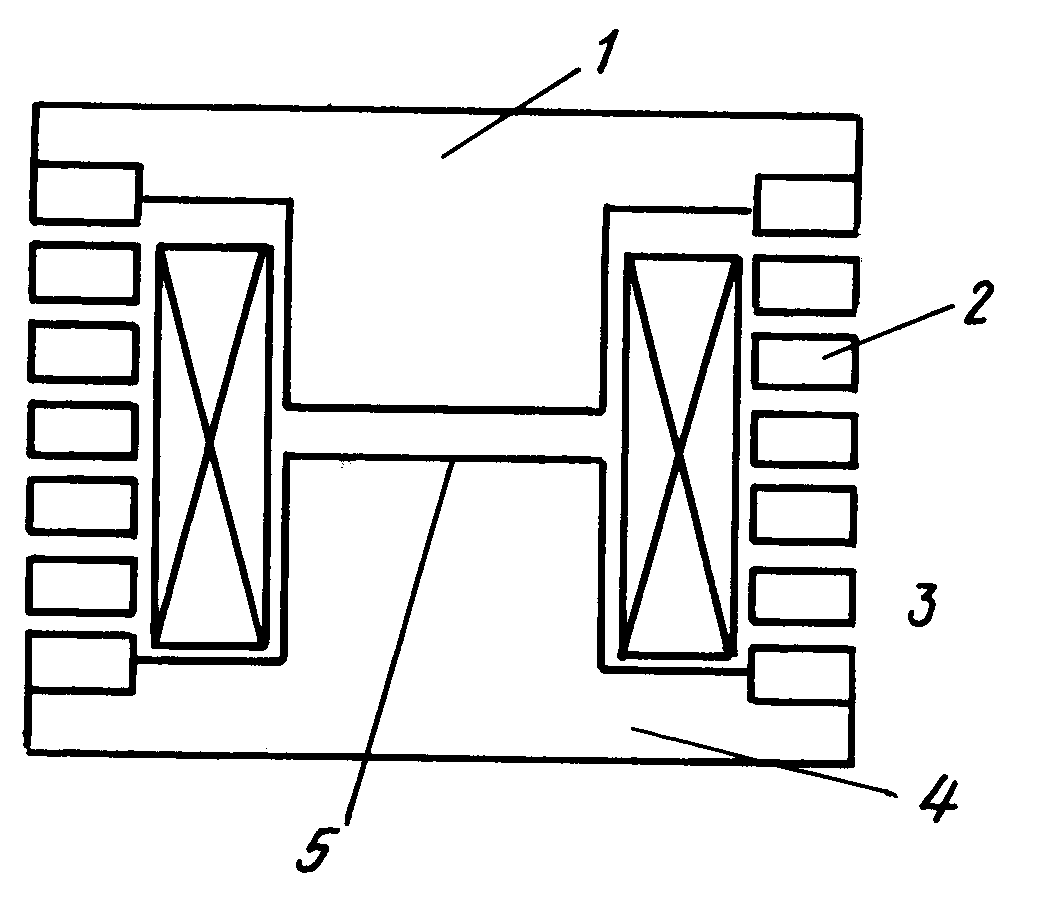 Установка питается от машинного агрегата, чем обеспечивается синусоидальная форма кривых тока в обмотках линейного двигателя и снимаются побочные явления, связанные с, высшими гармоническими тока.
Установка питается от машинного агрегата, чем обеспечивается синусоидальная форма кривых тока в обмотках линейного двигателя и снимаются побочные явления, связанные с, высшими гармоническими тока.
Рис. 14. Макет линейного двигателя.
По механическим параметрам макет тягового линейного двигателя может работать при линейных скоростях до 350 км/ч, но и по условиям питания эта скорость была ограничена 100 км/ч. Линейная скорость диска относится к середине ширины пакетов стали индуктора [204, 207].
При малых синхронных скоростях вторичного элемента вместо тормозных усилий появляются тяговые, при постепенном увеличении синхронной скорости тяговые усилия уменьшаются и переходят в тормозные (рис. 15) [205, 141].
Существуют также краевые поперечные эффекты, которые проявляются в поперечном направлении двигателя, так как ширина сердечника ограничена. Краевые поперечные эффекты существуют и во вращающихся машинах, но они менее значительны. Во-первых, во вращающемся двигателе ток проходит по проводникам, расположенным в роторе (за некоторым исключением), а не в общей массе ротора. В роторе асинхронного двигателя активный ток проходит по токопроводящим стержням, а обратный — по короткозамкнутым кольцам. Сплошной ротор линейного двигателя не позволяет отделить активные токи от обратных. Во-вторых, ширина ротора и статора во вращающемся двигателе одинакова. В линейном двигателе ротор может быть шире, чем статор, иметь ту же либо меньшую ширину, чем статор.
Во-первых, во вращающемся двигателе ток проходит по проводникам, расположенным в роторе (за некоторым исключением), а не в общей массе ротора. В роторе асинхронного двигателя активный ток проходит по токопроводящим стержням, а обратный — по короткозамкнутым кольцам. Сплошной ротор линейного двигателя не позволяет отделить активные токи от обратных. Во-вторых, ширина ротора и статора во вращающемся двигателе одинакова. В линейном двигателе ротор может быть шире, чем статор, иметь ту же либо меньшую ширину, чем статор.
Обратные токи протекают и в тех зонах ротора, которые расположены за статором, если статор уже, чем ротор.
Если же в силу конструктивных причин статор шире, чем ротор, то обратные токи, естественно, проходят в частях ротора, находящихся в активной зоне статора. Поток возбуждения плохо используется, и это явление приводит к кажущемуся увеличению вторичного сопротивления. Этот эффект стремится увеличить пусковое усилие, но номинальный режим работы двигателя становится менее эффективным [175].
Рис. 15. Зависимость результирующей электромагнитной силы, вызванной процессами «входа-выхода», от индукции для различных синхронных скоростей движения
Явление описано и в зарубежной, и в отечественной литературе [8, 10, 11, 15, 68, 69, 71, 115].
миф или реальность, устройство, виды
Идея разработки вечного бестопливного двигателя не нова, за разработку такого агрегата во все времена брались именитые ученые своего времени. Однако ни технических средств для реализации задумки, не возможностей того времени не хватало. В некоторых случаях дело доходило только до теоретического обоснования, но существуют примеры реально разработанных альтернативных двигателей, которые призваны создать конкуренцию классическим электрическим машинам. Одним из таких вариантов является магнитный двигатель.
Миф или реальность?
Вечный двигатель знаком практически каждому еще со школьной скамьи, только на уроках физики четко утверждалось, что добиться практической реализации невозможно из-за сил трения в движущихся элементах. Среди современных разработок магнитных моторов представлены самоподдерживающие модели, в которых магнитный поток самостоятельно создает вращательное усилие и продолжает себя поддерживать в течении всего процесса работы. Но основным камнем преткновения является КПД любого двигателя, включая магнитный, так как он никогда не достигает 100%. Со временем мотор все равно остановится.
Поэтому все практические модели требуют повторного вмешательства через определенное время или каких-либо сторонних элементов, работающих от независимого источника питания. Наиболее вероятным вариантом бестопливных двигателей и генераторов выступает магнитная машина. В которой основной движущей силой будет магнитное взаимодействие между постоянными магнитами, электромагнитными полями или ферромагнитными материалами.
Актуальным примером реализации являются декоративные украшения, выполненные в виде постоянно двигающихся шаров, рамочек или других конструкций. Но для их работы необходимо использовать батарейки, которые питают постоянным током электромагниты. Поэтому далее рассмотрим тот принцип действия, который подает самые обнадеживающие ожидания.
Устройство и принцип работы
Сегодня существует достаточно большое количество магнитных двигателей, некоторые из них схожи, другие имеют принципиально отличительную конструкцию.
Для примера мы рассмотрим наиболее наглядный вариант:
Принцип действия магнитного двигателя
Как видите на рисунке, мотор состоит из следующих компонентов:
- Магнит статора здесь только один и расположен он на пружинном маятнике, но
такое размещение требуется только в экспериментальных целях. Если вес ротора
окажется достаточным, то инерции движения хватит для преодоления самого малого
расстояния между магнитами и статор может иметь стационарный магнит без
маятника. - Ротор дискового типа из немагнитного материала.
- Постоянные магниты, установленные на роторе в форме улитки в одинаковое положение.
- Балласт — любой увесистый предмет,
который даст нужную инерционность (в рабочих моделях эту функцию может
выполнять нагрузка).
Все, что нужно для работы такого агрегата — это придвинуть магнит статора на достаточное расстояние к ротору в точке самого наибольшего удаления, как показано на рисунке. После этого магниты начнут притягиваться по мере приближения формы улитки по кругу, и начнется вращение ротора. Чем меньше размер магнитов и чем более плавная форма получится, тем легче произойдет движение. В месте максимального сближения на диске установлена «собачка», которая сместит маятник от нормального положения, чтобы магниты не притянулись в статическое положение.
Разновидности магнитных двигателей и их схемы
Сегодня существует много моделей бестопливных генераторов, электрических машин и моторов, чей принцип действия основан на природных свойствах постоянных магнитов. Некоторые варианты были спроектированы именитыми ученными, достижения которых стали основополагающим камнем в фундаменте науки. Поэтому далее мы рассмотрим самые популярные из них.
Николы Тесла
В данном примере мы рассмотрим одну из разработок известного ученого, конструкция которой приведена на рисунке ниже:
Магнитный двигатель Тесла
Конструктивно магнитный двигатель Тесла состоит из таких элементов:
- электрического генератора, который представлен двумя дисками из проводника, помещенными в униполярной магнитной среде;
- гибкого ремня, изготовленного из проводящего материала, расположенного по периферии дисков;
- независимых магнитов, сохраняющих униполярность полей при вращении дисков.
Такой двигатель, по словам изобретателя, может функционировать и в качестве генератора, вырабатывая электрическую энергию при вращении дисков.
Минато
Этот пример нельзя назвать самовращающимся двигателем, так как для его работы требуется постоянная подпитка электрической энергией. Но такой электромагнитный мотор позволяет получать значительную выгоду, затрачивая минимум электричества для выполнения физической работы.
Схема двигателя Минато
Как видите на схеме, особенностью этого вида является необычный подход к расположению магнитов на роторе. Для взаимодействия с ним на статоре возникают магнитные импульсы за счет кратковременной подачи электроэнергии через реле или полупроводниковый прибор.
При этом ротор будет вращаться, пока его элементы не размагнитятся. Сегодня все еще ведутся разработки по улучшению и повышению эффективности устройства, поэтому назвать его полностью завершенным нельзя.
Николая Лазарева
Это не только простейший гравитационный двигатель, но и одна из реально работающих моделей вечного двигателя. Пример приведен на рисунке ниже:
Двигатель Лазарева
Как видите, для изготовления такого двигателя или генератора вам потребуется:
- колба;
- жидкость;
- трубка;
- прокладка из пористого материала;
- крыльчатка и нагрузка на вал.
Принцип действия заключается в том, что вода по тонкой трубке из-за избытка давления будет подниматься вверх и скапывать на прокладку и вращать крыльчатку. Далее вода будет просачиваться сквозь губку и под воздействием магнитного поля Земли дальше стекать в нижний резервуар. Цикл будет повторяться до тех пор, пока жидкость не исчезнет, что в идеально герметичном контуре не произойдет никогда. Для усиления момента на вращаемый вал добавляют магнитные усилители.
Говарда Джонсона
В своих исследованиях Джонсон руководствовался теорией потока непарных электронов, действующих в любом магните. В его двигателе обмотки статора формируются из магнитных дорожек. На практике эти агрегаты получили реализацию в конструкции роторного и линейного двигателя. Пример такого устройства приведен на рисунке ниже:
Двигатель Джонсона
Как видите, на оси вращения в двигателе устанавливаются сразу и статор и ротор, поэтому классически вал вращаться здесь не будет. На статоре магниты повернуты одноименным полюсом к роторным, поэтому они взаимодействуют на силах отталкивания. Особенность работы ученого заключалась в длительном вычислении расстояний и зазоров между основными элементами мотора.
Перендева
Данный вид двигателя, как и предыдущий, представляет собой еще одну модель магнитного взаимодействия между статором и ротором, где обе части содержат постоянные магниты. Схема конструкции обоих представляет собой диск или кольцо, в котором точечно устанавливаются вектолиты.
Магниты статора и ротора в двигателе Переднева
Как видите на рисунке, положение активных элементов имеет угол смещения, который и определяет эффективность вращения машины. Взаимодействие магнитных потоков в двигателе происходит при задании начального крутящего момента. Точность положения и угла наклона можно отстроить только в лабораторных или заводских условиях.
Василия Шкондина
Получить вечный генератор Василию Шкодину не удалось, КПД такого магнитного двигателя и сегодня не превышает 83%. Но и этого более чем достаточно, чтобы его повсеместно применяли для велосипедов, байков и самокатов. Он может эксплуатироваться как в режиме тяги, так и для рекуперации электроэнергии.
Двигатель Шкондина
На рисунке приведена конструкция магнитного двигателя Шкодина. Как видите, и ротор и статор представляют собой кольца. Из магнитных деталей он содержит 11 пар неодимовых магнитов. Ротор устройства содержит 6 электромагнитов, смещенных на одинаковое расстояние друг относительно друга.
Свинтицкого
Еще в конце 90-х украинский конструктор предложит модель самовращающегося магнитного двигателя, который стал настоящим прорывом в технике. За основу им был взят асинхронный двигатель Ванкеля, которому не удалось решить проблему с преодолением 360° оборота.
Игорь Свинтицкий эту проблему решил и получил патент, обратился в ряд компаний, однако асинхронное магнитное чудо техники никого не заинтересовало, поэтому проект был закрыт и за его масштабное тестирование ни одна компания не взялась.
Джона Серла
От электрического мотора такой магнитный двигатель отличает взаимодействие исключительно магнитного поля статора и ротора. Но последний выполняется наборными цилиндрами с таблетками из специального сплава, которые создают магнитные силовые линии в противоположном направлении. Его можно считать синхронным двигателем, так как разница частот в нем отсутствует.
Двигатель Серла
Полюса постоянных магнитов расположены так, что один толкает следующий и т.д. Начинается цепная реакция, приводящая в движение всю систему магнитного двигателя, до тех пор, пока магнитной силы будет хватать хотя бы для одного цилиндра.
Алексеенко
Интересный вариант магнитного двигателя представил ученый Алексеенко, который создал устройство с роторными магнитами необычной формы.
Двигатель Алексеенко
Как видите на рисунке, магниты имеют необычную изогнутую форму, которая максимально сближает противоположные полюса. Что делает магнитные потоки в месте сближения значительно сильнее. При начале вращения отталкивание полюсов получается значительно большим, что и должно обеспечить непрерывное движение по кругу.
Видео в помощь
Информационное письмо Образец оформления статьи Анкета автора | 29.12.2014 Мишуков Станислав Вадимович Электроэнергетический факультет
Аннотация: В статье описана актуальность создания линейных электродвигателей, приводится описание технологических процессов, в которых используются линейные электродвигатели, а также данная историческая справка о развитии линейных электрических машин. Ключевые слова: линейные электродвигатель, возвратно-поступательное движение, линейное перемещение, клапанные механизмы 29.12.2014 Mishukov Stanislav Vadimovich student, StGAU
Abstract: The article describes the relevance of the linear motor, a description of processes that use linear motors, and this historical background for the linear electric machines. Keywords: linear motor, the reciprocating motion, linear motion, the valve mechanism В современных технологических процессах все большее распространение получает применение линейных электродвигателей. Согласно Большому энциклопедическому словарю – это электродвигатель, в котором подвижная часть не вращается, а линейно перемещается вдоль неподвижной части – разомкнутого магнитопровода произвольной длины [1]. Создание линейного электродвигателя стало возможным благодаря изобретению вращательной электрической машины. Одним из самых значимых технических достижений конца XIX века стало изобретение электродвигателя. Это небольшое, экономичное, удобное устройство стало незаменимым элементом производства, вытеснив другие виды двигателей везде, где возможно применение электрического тока. Основные виды электродвигателей были разработаны, изучены и усовершенствованы в период быстрого развития электротехники, простиравшийся от 30-х годов до конца прошлого века. После изобретения принципа самовозбуждения, кольцевого, а затем барабанного якоря и асинхронного двигателя, классические конструктивные схемы были завершены. Дальнейшие изобретения в области электродвигателей касались отдельных узлов, элементов конструкций, схем обмоток, специальных машин, но не затрагивали основ конструкций и принципов действия. Однако в 1882 году французский академик Депре разрабатывает конструкцию электрического молота, в котором используется цилиндрический линейный двигатель из 80 катушек, собранных в виде секционированного соленоида. Это устройство становится объектом всеобщего внимания, потому что такой вид электродвигателей был неразвит, а с учетом безраздельного господства вращательного движения необычен и перспективен. Поэтому в 1902 году Зеден, стремясь создать более совершенную модель линейного электродвигателя, разворачивает асинхронный двигатель в плоскость, что становится отправной точкой развития этого направления. Применение линейных электродвигателей позволило упростить механические передачи, повысить экономичность и надежность работы привода и производственного механизма в целом. Нестандартная конструкция линейных электродвигателей повлекла появление новых терминов, которые применяются для обозначения отдельных элементов. В настоящее время еще не принята единая система терминологии, поэтому в технической литературе одинаковый смысл имеют понятия: статор – первичный элемент – индуктор, ротор – вторичный элемент – бегун – якорь – реактивная полоса. Часть двигателя, получающая энергию из сети, названа статором (хотя она не всегда является неподвижной частью), а часть двигателя, получающая энергию со статора, названа вторичным элементом. Разнообразие конструкций линейных электродвигателей привело к созданию возможности их применения практически в любом технологическом процессе с возвратно-поступательным движением или линейным перемещением исполнительного механизма. Одной из перспективных областей применения линейных электродвигателей стал электрический транспорт. Большой интерес представляет использование линейных электродвигателей в ударных машинах, например, сваезабивные молоты в строительстве. Линейные электродвигатели также применяются в текстильном производстве для привода челнока или прокладчика нити ткацкого станка, в горнодобывающем производстве в механизме транспортировки породы, в конвейерных линиях и других технологических процессах с линейным перемещением исполнительных механизмов. Широкое распространение получают линейные микро электродвигатели. Они позволяют создавать различные клапанные механизмы. Например, электропульсатор доильного аппарата на основе линейного электродвигателя [5, 6, 7]. Линейный электродвигатель позволяет управлять динамикой перемещения клапанного механизма пульсатора, управляя тем самым длительностью переходного процесса от такта сосания к такту сжатия. Это изобретение делает машинное доение животных максимально похожим на естественный процесс извлечения молока из вымени, уменьшает травмирования сосков животных и исключает заболевания маститом, что способствует увеличению продуктивности коров при машинном доении [2, 3, 4]. Таким образом, линейные электродвигатели являются универсальными устройствами, которые получают все большее распространение в технологических процессах. Разнообразие конструкций и простота исполнения делает этот вид двигателей самым востребованным для производителей, стремящихся вывести свое производство на высокотехнологичный уровень. Список литературы:
2014 © Мишуков С.В. |
Микроприводная техника для прецизионных применений / Статьи и обзоры / Элек.ру
В последние годы, в условиях постоянно растущей потребности в особо точных мехатронных устройствах, острым вопросом для отечественных производителей вопросом становится выбор качественной приводной техники. Особенно остро этот вопрос стоит в области микроприводной техники, где ко всей системе как правило предъявляются достаточно жёсткие требования по точностям, габаритам, развиваемым скоростям. Кроме того, в силу характера конечных изделий — существует и ряд специфических требований: так для портативных устройств очень важным параметром является низкое токопотребление, для медицинских приборов — максимально долгий срок службы изделия, а также возможность стерилизации всего устройства, а значит и двигателя в автоклаве. Особые требования предъявляются также и к управляющей электронике — это, как правило, компактность, автономность, малые потребляемые токи, возможность работы в составе промышленных сетей.
Всем этим требованиям удовлетворяют решения, предлагаемые компанией «Микропривод», ориентированной на поставку, разработку, системную интеграцию в области мехатронных прецизионных приводных систем. Говоря о микроприводной технике, особое внимание следует уделить продуктам швейцарско-немецкого концерна Faulhaber, эксклюзивным представителем которого на территории Российской Федерации и стран СНГ является компания «Микропривод». В рамках этой статьи проводится обзор решений, предлагаемых на данный момент.
Коллекторные микродвигатели
Коллекторные микродвигатели с полым ротором
Это самая массовая, традиционная и одновременно самая доступная серия электродвигателей, находящая своё применение в самых разнообразных отраслях промышленности. В рамках данной серии предлагаются электродвигатели мощностью от 0,12 до 226 Вт диаметром от 6 до 38 мм. Все двигатели опционально комплектуются редукторами схожего диаметра с различными передаточными отношениями и импульсными микродатчиками обратной связи. Старшие модели двигателей могут комплектоваться электромагнитными тормозами.
Благодаря конструкции с полым ротором, моторы развивают внушительные скорости (до 13000 об/мин для младших версий), высокие крутящие моменты и могут характеризоваться пониженным энергопотреблением.
Двигатели имеют варианты исполнения под различные стандартизированные питающие напряжения, также существует большое количество опций, позволяющих, к примеру, расширить температурный диапазон или изменить выход проводов.
Плоские коллекторные двигатели и мотор редукторы
Данная серия двигателей находит широкое применение в портативных приборах, где особенно актуален вопрос малых габаритов и пониженного энергопотребления. Такие параметры достигаются благодаря использованию трёх самоподдерживающихся плоских обмоток, расположенных под 120 градусов. В рамках данной серии предлагаются как просто двигатели, так и двигатели с интегрированными энкодерами, а также мотор-ре- дукторы.
Бесколлекторные микродвигатели
Особо малые бесколлекторные двигатели
Особое место в линейке решений Faulhaber занимает серия особо малых бесколлекторных двигателей. Эти двигатели находят своё применение в медицинской технике, приборах, микромехатронных компонентах. В рамках данной серии предлагаются двигатели диаметром от 1,9 до 5 мм с бездатчиковой коммутацией обмоток (управление по противоЭДС), опционально комплектуемые микроредукторами сходного диаметра, а также парами винт-гайка скольжения. Немаловажным является и тот факт, что двигатели данной серии могут быть оснащены управляющей электроникой ультракомпактного формфактора.
Бесколлекторные серводвигатели
Пожалуй, одна из самых широких линеек двигателей в гамме продукции Faulhaber, пользующаяся всё большим спросом у отечественных специалистов. Это и не удивительно, ведь бесколлекторные двигатели обладают массой преимуществ по сравнению с традиционными решениями — это прежде всего повышенный срок службы, более высокая удельная мощность, высокие развиваемые скорости (до 100000 об/мин), а также богатый набор оп-ций,позволяющий даже при единичных поставках получить специализированное решение, удовлетворяющее требованиям той или иной отрасли.
В рамках линейки бесколлекторных серводвигателей предлагаются серия двигателей с интегрированными датчиками Холла диаметром от 6 до 44 мм, серия безсенсорных двигателей SMARTSHELL®, а также серия инновационных четырёхполюсных бесколлекторных двигателей BX4. Опционально все двигатели этой линейки могут комплектоваться аналоговыми дат- чиками Холла, либо энкодерами, что позволяет решать задачи позиционирования, а также различными редукторами и управляющей электроникой.
Особое место в линейке серводвигателей занимают двигатели с интегрированной электроникой, представляющие собой по сути уже готовую приводную систему в одном корпусе. Существуют модели как с интегрированным простым контроллером скорости, позволяющие легко и быстро организовать серво режим по скорости, так и двигатели, с интегрированным программируемым контроллером движения с RS-232, либо CAN-интерфейсом.
Плоские бесколлекторные двигатели и моторредукторы
Инновационная серия двигателей, ориентированная на использования в микромехатронных компонентах, медицинской технике и портативных приборах. Характери-зуется ультракомпактными размерами, высокими развиваемыми скоростями, ультрамалыми пульсациями тока. В рамках данной серии предлагаются как двигатели, так и мотор-редукторы с варьируемым передаточным отношением.
Шаговые двигатели PRECIstep®
Шаговые двигатели PRECIstep ® — это специальные миниатюрные биполярные двигатели для прецизионных применений. Отличительной особенностью этих двигателей является компактный размер, большой квазистатический момент удержания, возможность комплектации с редукторами, датчиками и передачами винт-гайка скольжения. Все двигатели в рамках одной модели имеют несколько исполнений по типу обмоток, что позволяет подобрать наиболее оптимальное решение для каждой задачи. Кроме того, для шаговых двигателей данной серии существует огромное количество опций, позволяющих, к примеру, расширить температурный диапазон двигателя, реализовать работу в вакууме.
Линейные серводвигатели
Для реализации особо точного программируемого линейного движения Faulhaber предлагает серию линейных серводвигателей. Эти привода при компактном размере развивают усилия до 27 Н, могут использоваться как в режиме двигателя (двигатся каретка при зафиксированном вале), так и в режиме акутатора (двигатеся вал, каретка зафиксирована). Благодаря интегрированным линейным датчикам Холла, могут быть достигнуты точности по-зиционирования до 120 мкм без применения каких-либо внешних датчиков. Линейные серводвигатели не требуют смазки, либо какого-то дополнительного обслуживания при работе, бесшумны, развивают скорости до 3,2 м/с, а ускорения до 198 м/с2.
Линейные двигатели Faulhaber предлагаются с различной длиной штока. Доступны исполнения как для работы с компактными контроллерами производителя, так и с синусно-косинусной обратной связью, позволяющие реализовать управление с помощью GKR-контроллера.
Управляющая электроника
Работа современной высокоточной микроприводной системы невозможна без использования управляющей электроники. Зачастую универсальная управляющая электроника не является оптимальным решением для микроприводных задач в силу больших габаритов, обилия ненужного функционала. Компания «Микропривод» предлагает широкую линейку компактных драйверов, а также программируемых контролеров движения для работы с миниатюрными двигателями всех типов. Кроме того, специалисты компании всегда готовы провести как настройку и программирование электроники, так и предложить разработку контроллера двигателя по индивидуальному Техническому Заданию заказчика.
М. В. Сонных, журнал «Конструктор-машиностроитель» №1, 2010
Линейные вращательные двигатели | Лидер линейных технологий движения
Линейно-вращательные двигатели серии
PR01 могут использоваться для реализации любой комбинации линейного и вращательного движения. Компактный корпус содержит электромагнитный линейный привод и поворотный прямой привод, каждый из которых управляется сервоприводом. Это означает, что контроллер верхнего уровня может реализовывать высокодинамичные последовательности линейно-вращательных движений, которые могут быть запрограммированы как синхронные или полностью независимые друг от друга.
В зависимости от требований пользователь может выбрать один из различных типоразмеров, обеспечивающих максимальный крутящий момент от 1,5 до 8,9 Нм. Длина хода до 300 мм обеспечивает достаточную гибкость при работе с бетоном. Помимо стандартной версии, в семейство продуктов входят варианты с редукторами, полыми валами и компонентами из нержавеющей стали.
- Линейно-поворотный прямой привод
- Программируемые усилия и моменты прессования
- С редуктором или полым валом
- Синхронные линейные и вращательные движения
- Доступен в исполнении из нержавеющей стали
- Простое внедрение систем закрытия и завинчивания
Два независимых движения только с одним компонентом
В качестве инновационного элемента конструкции линейно-вращательные двигатели могут использоваться для выполнения сложных задач, таких как заправка, закрытие, перемещение, штабелирование, выравнивание и многие другие с помощью всего лишь одного компонента.
Многокоординатные системы закрытия карусели, в частности, могут быть компактными и эффективными с линейно-ротационными двигателями LinMot.
Благодаря этой технологии двигателей линейное и вращательное движения могут быть впервые отделены от движения карусели. Теперь можно реализовать любую комбинацию линейных и вращательных движений. Профили движения, скорости, обороты и усилия прессования или моменты затяжки могут задаваться произвольно и независимо друг от друга. Во время мониторинга процесса положение крышки в конце процесса закрытия может быть считано, чтобы обнаружить смещение посадки.
Эти инновационные многоосные системы закрытия позволяют несложно менять продукт одним щелчком мыши. Пользователь постоянно получает обратную связь по всем критическим параметрам, что значительно сокращает время простоя из-за неисправностей. По сравнению с системами механического закрытия, решение LinMot с линейно-роторными двигателями требует до 60% меньше времени для процесса закрытия.
Стандартный
Стандартная версия линейно-поворотного двигателя предоставляет пользователю широкий выбор доступных значений длины хода, усилия прессования и крутящего момента.
- Линейный прямой привод
- Прямой поворотный привод
- Независимые линейные и вращательные движения
- Встроенные датчики положения
- Встроенный контроль температуры
- Программируемые профили перемещения и положения
- Программируемое усилие пресса
- Программируемый крутящий момент
Вариант коробки передач
Линейно-роторный двигатель с редуктором обеспечивает точное динамическое позиционирование даже для нагрузок с высоким моментом инерции.Сбор и размещение грузов вне оси вращения — классическое применение для этого типа двигателя. С помощью этого нового элемента дизайна также можно очень легко реализовать динамические и свободно программируемые движения небольших столиков с циферблатом с одновременным вращательным и вертикальным перемещением.
- Независимые линейные и вращательные движения
- Для движений с высокими нагрузками
- Для приложений с высоким крутящим моментом
- Доступны три передаточных числа коробки передач
- С направляющими для поперечных нагрузок
Вариант с полым валом
Полый вал имеет центральное сквозное отверстие в продольной оси.Это позволяет расширить область применения линейно-поворотного двигателя. Через двигатель можно пропускать сжатый воздух, вакуум или другие среды.
- Версия с полым валом
- Внутренний диаметр 2,5 / 4,0 мм
- Простая подача сжатого воздуха
- Возможность модернизации для вакуумного захвата
- Комбинируется с пневматическим или электрическим захватом
Линейный двигатель
— Линейный двигатель
Линейный двигатель можно представить как роторный электродвигатель, разрезанный по радиальной плоскости и раскрученный.Полученный в результате линейный серводвигатель представляет собой электромагнитный линейный двигатель с прямым приводом, который может производить линейное движение электрически и без соприкосновения с деталями, устраняя люфт, наматывание, износ и проблемы с обслуживанием. Линейное движение создается без использования пневматики, гидроцилиндров или преобразования вращательного движения в поступательное с использованием редукторов, шпинделей, ремней, зубчатой рейки или винтов.
Линейные двигатели в настоящее время используются в роботах, исполнительных механизмах, прецизионных столах / ступенях, оптоволоконных и фотонных системах выравнивания и позиционирования, сборке, системах захвата и размещения, станках, полупроводниковом оборудовании, производстве электроники, системах контроля, требующих гибкого управления с высокой пропускной способностью, системах технического зрения и во многих других промышленных приложениях управления движением.
h3W Technologies производит большой выбор линейных двигателей и компонентов линейного перемещения. h3W — лидер в технологии линейного перемещения, разрабатывающий двигатели на заказ для различных отраслей и приложений. Мы производим ряд различных типов линейных двигателей, каждый из которых имеет свои преимущества.
Бесщеточный
Бесщеточные линейные двигатели постоянного тока обеспечивают бесконтактную работу и не требуют обслуживания. Доступен как в версиях без железа (без зубцов), так и с железным сердечником.Они способны к профилям движения с высокой скоростью и высоким ускорением. Им можно управлять с помощью стандартных трехфазных бесщеточных сервоусилителей. Бесщеточные линейные двигатели могут развивать ускорение до 12 g и скорость более 200 дюймов в секунду [5+ м / с].
Щетка
Щеточные линейные двигатели постоянного тока идеально подходят для сервоприводов с длинным ходом, открытого или закрытого контура и линейного перемещения. Их можно использовать на скоростях до 100 дюймов / сек [2,5 м / сек] и всего 1 дюйм / сек [25 мм / сек].Они способны очень точно контролировать положение, скорость и ускорение в сочетании с линейным энкодером.
Звуковая катушка
Приводы со звуковой катушкой постоянного тока идеально подходят для сервоприводов с коротким ходом (обычно менее 2 дюймов) с обратной связью. Их компактный размер позволяет им поместиться в небольших помещениях. У них очень низкие электрические и механические постоянные времени. Малая движущаяся масса обеспечивает быстрое ускорение легких грузов. Они доступны как в версиях с подвижной катушкой, так и с подвижным магнитом.
Линейный шаговый
Линейные шаговые двигатели используются как в приложениях позиционирования с открытым, так и с закрытым контуром. Поскольку устройство позиционирования встроено в форсунку и плиту, дополнительных устройств обратной связи не требуется, что снижает общую стоимость системы. Для работы без обратной связи настройка сервопривода не требуется. На одной плите могут работать несколько толкателей. Для линейных шаговых двигателей типичными являются ускорение 1 g и скорость до 100 дюймов / сек [2,5 м / с]. Они доступны как в одноосной, так и в двухосевой версиях.
Линейная индукция
Плоский линейный асинхронный двигатель переменного тока (LIM) обычно работает непосредственно от трехфазного сетевого напряжения с регулируемой частотой или с векторным приводом, если требуется регулирование скорости. С LIM возможны ускорения до 1 g со скоростью более 1800 дюймов в секунду [45 м / с]. Они идеально подходят для высокоскоростных и длительных путешествий с тяжелыми грузами.
Полиноид
Трубчатый линейный асинхронный двигатель переменного тока (полиноид) обычно работает непосредственно от одно- или трехфазного сетевого напряжения.У полиноидов возможны ускорения более 1 g. Они идеально подходят для работы с коротким ходом и малым рабочим циклом. Их можно использовать для замены пневмоцилиндров, когда сжатый воздух недоступен.
| Изображение | Тип позиционирования | Усилие при 100% нагрузке | Усилие при нагрузке 10% | Максимальный ход | Максимальная скорость * | Макс. Ускор. * | или тип привода | Тип подшипника | Опции | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Бесщеточный (Без железа) | Замкнутый контур | 1-200 фунтов [5-900 Н] | 3-600 фунтов [15-2700 Н] | Без ограничений | 240 дюймов в секунду [6 м / с] | 12 г | Трехфазный бесщеточный сервопривод, трапециевидный или синусоидальный | Предоставляется заказчиком | Воздух, водяное охлаждение | ||
| Бесщеточный (железный сердечник) | Замкнутый контур | 15-1200 фунтов [60-2500 Н] | 45-3600 фунтов [180-7500 Н] | Безлимитный | 240 дюймов в секунду [6 м / с] | 12 г | Трехфазный бесщеточный сервопривод, трапециевидный или синусоидальный | Предоставляется заказчиком | Воздух, водяное охлаждение | ||
| Щетка | Замкнутый контур | 4-60 фунтов [15-275 Н] | 12–180 фунтов [45–825 Н] | 96 дюймов [2450 мм] | 100 дюймов в секунду [2.5 м / с] | 6 г | Сервопривод с ШИМ-щеткой | Предоставляется заказчиком | Кабели стационарные, водяное охлаждение | ||
| Звуковая катушка (подвижная катушка) | Открытый и закрытый контур | 0,05-600 фунтов [0,2-4500 Н] | 0,15-1800 фунтов [0,6-13500 Н] | 4 дюйма [100 мм] | 50 кадров в секунду [1.27 м / с] | 20 г | Сервопривод с линейным / ШИМ-управлением | Предоставляется заказчиком, шариковая втулка | Крепление, обмотки, преобразователи | ||
| Звуковая катушка (подвижный магнит) | Открытый и закрытый контур | 0,05-600 фунтов [0,2-4500 Н] | 0,15-1800 фунтов [0.6-13500 Н] | 4 дюйма [100 мм] | 50 дюймов в секунду [1,27 м / с] | 20 г | Сервопривод с линейным / ШИМ-управлением | Предоставляется заказчиком, шариковая втулка | Крепление, обмотки, преобразователи | ||
| Одноосный линейный шаговый двигатель | Открытый и закрытый контур | 2-50 фунтов [9-225 Н] | 2-50 фунтов [9-225 Н] | 144 в [3.6 м] | 80 дюймов в секунду [2 м / с] | 1 г | Микрошаг | Воздух, ролик | Монтаж, кабели, 2- и 4-фазные | ||
| Двухосевой линейный шаговый двигатель | Открытый и закрытый контур | 1,5-30 фунтов [6-140 Н] | 1,5-30 фунтов [6-140 Н] | 20 x 20 дюймов [0.5 x 0,5 м] | 80 дюймов в секунду [2 м / с] | 1 г | Микрошаг | Воздух | Монтаж, кабели, 2- и 4-фазные | ||
| Линейная индукция | Открытый цикл | 1-80 фунтов [4-360 Н] | 5.5-440 фунтов [22-1980 Н] | Безлимитный | 1800 дюймов в секунду [45 м / с] | 2 г | Напряжение сети переменного тока, переменная частота, векторный привод | Предоставляется заказчиком | Воздушное охлаждение | ||
| Полиноид | Открытый цикл | 1–9 фунтов [4–40 Н] | 5.5-49,5 фунтов [22-220 Н] | 120 дюймов [3 м] | 270 дюймов в секунду [6 м / с] | 2 г | Напряжение сети переменного тока, переменная частота, векторный привод | Предоставляется заказчиком | Воздушное охлаждение | ||
* = Максимальные значения зависят от размера двигателя и доступного напряжения на шине. Свяжитесь с заводом-изготовителем, чтобы обсудить требования к применению.
Что такое линейные асинхронные двигатели?
Асинхронный двигатель — это двигатель, в котором ток в роторе индуцируется электромагнитным полем в статоре, что исключает использование магнитов.Линейный асинхронный двигатель — это тип линейного двигателя, основанный на роторном асинхронном двигателе переменного тока.
Подобно линейным двигателям с постоянными магнитами (обычно обозначаемым как без железа типа и с железным сердечником ), линейные асинхронные двигатели состоят из первичной части (аналогичной статору в роторном асинхронном двигателе) и вторичной части (аналогичной ротору в поворотный вариант). Первичная обмотка состоит из трехфазной обмотки, собранной на стальном пластинчатом пакете и залитой эпоксидной смолой.
Автор изображения: Кейт Гиббс
Вторичная обмотка состоит из того, что обычно называют «реакционной пластиной» — проводящей алюминиевой или медной пластины, обычно со стальной основой. (Сталь можно не использовать, но сила двигателя будет значительно уменьшена.)
Для линейных асинхронных двигателей первичная обмотка состоит из стального ламинированного пакета с обмотками, а вторичная — из токопроводящей пластины (обычно из алюминия или меди) со стальной основой.
Изображение предоставлено: Circuit Globe
Когда питание подается на первичную обмотку, магнитный поток развивается и распространяется по длине первичной обмотки.В проводящем материале вторичной обмотки индуцируются вихревые токи (отсюда и термин «асинхронный двигатель»). Магнитный поток первичной обмотки и индуцированные токи вторичной обмотки взаимодействуют, создавая линейную силу.
Линейные подшипники необходимы в линейных асинхронных двигателях для поддержания надлежащего воздушного зазора между первичной и вторичной частями. Линейные подшипники также поддерживают силы притяжения, возникающие между первичной и вторичной обмотками при включении двигателя.
Распространенным вариантом является двусторонний линейный асинхронный двигатель (DSLIM или DLIM), в котором реакционная пластина проходит между двумя первичными обмотками, обращенными друг к другу.Для конструкций DLIM реакционная пластина сделана только из проводящего материала (алюминия или меди) и не имеет стальной основы. Двусторонняя конструкция обеспечивает более высокие осевые силы и устраняет силы притяжения между первичной и вторичной частями.
Двухсторонние линейные асинхронные двигатели могут создавать более высокие тяговые усилия.
Изображение предоставлено: Circuit Globe
Линейные асинхронные двигатели могут быть подключены непосредственно к трехфазному источнику переменного тока, если приложение будет работать на одной скорости.Для переменного и точного управления скоростью можно использовать частотно-регулируемый или векторный привод. (Обратите внимание, что однофазный источник переменного тока также может использоваться для линейных асинхронных двигателей, но эффективность будет снижена.)
Линейная скорость первичной обмотки пропорциональна частоте напряжения питания и шагу полюсов пластин первичной части.
Где:
В с = скорость статора (первичного) (м / с)
t = шаг полюсов (м)
f с = частота источника питания (Гц)
Но линейные асинхронные двигатели являются асинхронными, что означает, что вторичная обмотка движется со скоростью, меньшей, чем магнитное поле первичной обмотки.Разница в скорости называется «пробуксовкой».
Где:
В r = скорость ротора (вторичного) (м / с)
s = скольжение
Тяга, создаваемая линейным асинхронным двигателем, зависит от подаваемого напряжения, величины скольжения и размера воздушного зазора, а также от влияния концевых эффектов. А поскольку линейные асинхронные двигатели имеют более низкий КПД, охлаждение может оказывать ощутимое влияние на способность двигателя создавать тягу.По этой причине производители обычно предоставляют диаграммы «сила-скорость» и «сила-коэффициент заполнения» для выбора двигателя.
На производство силы влияет несколько факторов, включая подаваемое напряжение, воздушный зазор и скорость двигателя.
Изображение предоставлено: h3W Technologies
Концевые эффекты вызваны относительным движением между первичной и вторичной частями и вызывают неравномерное распределение потока в воздушном зазоре с более слабым потоком на переднем крае первичного и более сильным потоком на задний край.Это может привести к тормозному эффекту (противодействию движению), особенно при небольшом скольжении.
Как и в линейных двигателях с постоянными магнитами, первичная или вторичная обмотки могут быть движущейся частью линейного асинхронного двигателя. Но чтобы уменьшить проблемы с кабелями (поскольку питание подается на первичную), вторичная часть часто является движущейся частью. Эти двигатели также могут иметь либо более короткую первичную часть и более длинную вторичную часть, либо более длинную первичную часть и более короткую вторичную часть. Если требуемый ход относительно длинный, первичная часть обычно будет короче, чтобы избежать затрат и сложности изготовления длинной первичной детали с множеством обмоток.
Линейные асинхронные двигатели
обеспечивают высокие постоянные осевые силы, высокую скорость и ускорение, а также относительно простое управление. Если вы ездили на поезде на магнитной подвеске или «запущенных» американских горках, вы, возможно, испытали на себе силу и скорость линейных асинхронных двигателей. Промышленные применения обычно выигрывают от линейных асинхронных двигателей при транспортировке и транспортировке материалов.
Что такое электромагнитный двигатель? (с рисунками)
Электромагнитный двигатель — это машина, которая использует магнитные силы, создаваемые проводом с протекающим электричеством, для обеспечения движения двигателя.Все электродвигатели работают на электромагнитных принципах. Типы электродвигателей включают двигатели переменного тока (AC) и двигатели постоянного тока (DC). Двигатели переменного тока используют ток от стены, а двигатели постоянного тока используют батарею в качестве источника энергии и магнитных сил для вращения двигателя. Электромагнитный двигатель распространен почти в каждом доме, часто встречается в популярных предметах домашнего обихода, таких как вентиляторы, насосы для бассейнов, кондиционеры, стиральные машины и электрические зубные щетки.
На дизель-электрическом локомотиве дизельный двигатель обеспечивает мощность тягового электродвигателя, который вращает колеса агрегата.
Вращающее движение электромагнитного двигателя основано на силах, наблюдаемых в магнитных полюсах. Магнит, подвешенный на веревке в центре, будет естественно вращаться так, чтобы один конец был направлен на север, а другой конец — на юг. Магнитные полюса, расположенные на каждом конце магнита, притягиваются, если полюса противоположны, и отталкиваются, если полюса одинаковы. Когда два магнита северного полюса попадают в поле силы магнитов, магниты отталкиваются друг от друга.Если объединить один северный полюс и один южный полюс, они будут притягиваться и прилипать друг к другу.
Все электродвигатели работают на электромагнитных принципах.
Хотя электромагниты, используемые для научных экспериментов в классе, обычно представляют собой провода, намотанные на небольшую железную палку, правильно скрученный проводящий провод может стать электромагнитом, когда на него подается ток.Сила усиливается, когда проволока наматывается. Магнитная сила от проволочной катушки с током становится сильнее, когда катушка наматывается на железный магнит.
Электрические зубные щетки имеют электромагнитные двигатели.
Электрический ток, протекающий по проводу, создает магнитное поле, поэтому в проводах присутствует электромагнитная сила, по которым протекает ток. Следовательно, провод, по которому проходит электрический ток, обладает внутренней магнитной силой. Когда этот провод наматывается в несколько параллельных петель, он приобретает свойства магнита, когда через него проходит ток.Провода, не предназначенные для использования в качестве электромагнитов, часто экранированы, чтобы ослабить магнитную силу и уменьшить ее взаимодействие с другой находящейся поблизости электроникой.
В домашних генераторах, работающих на газе, используются те же принципы, что и в электромагнитных двигателях, однако они работают в обратном направлении и преобразуют механическое воздействие в электричество.
Некоторые типы электромагнитных двигателей могут приводиться в движение без электрифицированного магнита с железным сердечником, используя только магнитную силу от тщательно уложенных спиральных проводов. Обычно электромагнитные двигатели имеют один или несколько электромагнитов с железным сердечником, приводящих в движение двигатель. Хотя электромагнит, созданный с помощью магнитного сердечника, более мощный, он также потребляет больше электроэнергии, увеличивая нагрузку на источник питания и быстрее разряжая батареи. В узлах мощных электромагнитных двигателей иногда используется более одного электромагнита в двигателе, чтобы обеспечить управляемое повышение мощности двигателя.
Электромагниты могут повлиять на показания компасов поблизости.
Привод с линейным двигателем по лучшей цене — Отличные предложения на приводы с линейным двигателем от мировых продавцов приводов с линейным двигателем
Отличные новости !!! Вы находитесь в нужном месте для привода с линейным двигателем.К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально тысячи отличных продуктов во всех товарных категориях. Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.
AliExpress никогда не уступит по выбору, качеству и цене. Каждый день вы будете находить новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, поскольку этот топовый привод с линейным двигателем в кратчайшие сроки станет одним из самых востребованных бестселлеров. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что приобрели линейный привод на AliExpress.Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще не уверены в линейном приводе и думаете о выборе аналогичного товара, AliExpress — отличное место для сравнения цен и продавцов. Мы поможем вам разобраться, стоит ли доплачивать за высококачественную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь.И, если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. и ожидаемая экономия.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе. Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца.Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз. Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
А если вы новичок на AliExpress, мы откроем вам секрет.Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны — и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress. Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, мы думаем, вы согласитесь, что вы получите линейный привод двигателя по самой выгодной цене.
У нас всегда есть новейшие технологии, новейшие тенденции и самые обсуждаемые лейблы.На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните самый лучший шоппинг прямо здесь.
Линейные приводы
— электрические линейные направляющие, электрические линейные цилиндры, компактные линейные приводы
Преимущества использования линейных приводов, линейных суппортов и линейных цилиндров
При проектировании автоматизированного оборудования необходимо учитывать различные факторы, включая компоновку производственной линии, среду установки, простоту обслуживания, конфигурацию электропроводки и системы управления и так далее.Это означает, что требуется много человеко-часов для выбора двигателя и других механических компонентов, а также для создания списка деталей, чертежей, руководств по эксплуатации и т.п. Использование линейных и поворотных приводов позволяет сократить это время и дает дополнительные преимущества.
Повышенная эффективность конструкции
Основной особенностью автоматизированного оборудования является его способность выполнять ряд основных операций, таких как «перемещение», «толкание» и «вращение». Другими словами, вы можете проектировать автоматизированное оборудование, выбирая и комбинируя линейные и поворотные приводы, способные выполнять эти основные операции.Поскольку все, что вам нужно, это выбрать привод, вы можете сэкономить время и силы.
Более короткие сроки изготовления и более высокое качество
При сборке оборудования собственными силами путем сборки двигателя и механических компонентов (см. Иллюстрацию) качество сборки влияет на сопротивление перемещению и точность положения, поэтому в конечном итоге потребуются корректировки для достижения ожидаемых рабочих характеристик. С другой стороны, наши линейные и поворотные приводы представляют собой законченные продукты, гарантирующие указанные рабочие характеристики, поэтому использование линейных и поворотных приводов сокращает объем работы по регулировке и обеспечивает однородное качество.
Oriental Motor предлагает различные линейные и поворотные приводы, которые помогут вам повысить продуктивность проектирования.
Электрические линейные направляющие
Двигатель интегрирован с механизмом линейного перемещения, что делает этот привод идеальным для передачи нагрузок.
Электрические линейные цилиндры
Двигатель интегрирован с механизмом линейного перемещения, что делает этот привод идеальным для толкающих и тянущих нагрузок.
Компактный электрический цилиндр
Шаговый двигатель интегрирован с шариковой винтовой парой. Идеальный привод для толкания и тяги небольших грузов или для точной настройки.
Линейные приводы с реечной передачей
Реечный механизм в сочетании с двигателем для обеспечения горизонтального или вертикального линейного движения.
Гибридная система управления αSTEP
Продукты
AlphaStep — это гибридные двигатели на базе шаговых двигателей с уникальной гибридной системой управления, сочетающие в себе преимущества «управления без обратной связи» и «управления с обратной связью».
Положение двигателя всегда контролируется, а затем водитель автоматически переключается между 2 типами управления в зависимости от ситуации.
Обычно работает в режиме управления разомкнутым контуром для такой же простоты использования, что и шаговый двигатель
Высокий отклик
Благодаря высокой чувствительности шагового двигателя возможно перемещение на небольшое расстояние за короткое время. Двигатели могут выполнять команды без задержек.
Удержание позиции остановки без охоты
Во время позиционирования двигатель останавливается с собственной удерживающей силой без рывков. Благодаря этому он идеален для применений, где низкая жесткость механизма требует отсутствия вибрации при остановке.
Без тюнинга
Поскольку он обычно работает с разомкнутым контуром управления, позиционирование по-прежнему возможно без регулировки усиления, даже когда нагрузка колеблется из-за использования ременного механизма, кулачкового или цепного привода и т. Д.
Переключение на управление по замкнутому контуру во время перегрузки для более надежной работы, как серводвигатель
продолжает работу даже при резких колебаниях нагрузки и резком ускорении
Он работает синхронно с командами, использующими управление без обратной связи в нормальных условиях. В условиях перегрузки он немедленно переключается на управление с обратной связью для корректировки положения.
Выходной сигнал тревоги в случае неисправности
Если перегрузка действует постоянно, выдается аварийный сигнал.Когда позиционирование завершено, выводится сигнал КОНЕЦ. Это обеспечивает тот же уровень надежности, что и серводвигатель.
.