
что это такое, регулирование температуры ПИД регулятором
Дифференциальный пропорционально-интегральный регулятор — устройство, которое устанавливают в автоматизированных системах для поддержания заданного параметра, способного к изменениям.
На первый взгляд все запутанно, но можно объяснить ПИД регулирование и для чайников, т.е. людей, не совсем знакомых с электронными системами и приборами.
Что такое ПИД регулятор?
ПИД регулятор — прибор, встроенный в управляющий контур, с обязательной обратной связью. Он предназначен для поддержания установленных уровней задаваемых величин, например, температуры воздуха.
Устройство подает управляющий или выходной сигнал на устройство регулирования, на основании полученных данных от датчиков или сенсоров. Контроллеры обладают высокими показателями точности переходных процессов и качеством выполнения поставленной задачи.

Три коэффициента ПИД регулятора и принцип работы
Работа ПИД-регулятора заключается в подаче выходного сигнала о силе мощности, необходимой для поддержания регулируемого параметра на заданном уровне. Для вычисления показателя используют сложную математическую формулу, в составе которой есть 3 коэффициента — пропорциональный, интегральный, дифференциальный.
Возьмем в качестве объекта регулирования ёмкость с водой, в которой необходимо поддерживать температуру на заданном уровне с помощью регулирования степени открытия клапана с паром.
Пропорциональная составляющая появляется в момент рассогласования с вводными данными. Простыми словами это звучит так — берется разница между фактической температурой и желаемой, умножается на настраиваемый коэффициент и получается выходной сигнал, который должен подаваться на клапан. Т.е. как только градусы упали, запускается процесс нагрева, поднялись выше желаемой отметки — происходит выключение или даже охлаждение.
Дальше вступает интегральная составляющая, которая предназначена для того, чтобы компенсировать воздействие окружающей среды или других возмущающих воздействий на поддержание нашей температуры на заданном уровне. Поскольку всегда присутствуют дополнительные факторы, влияющие на управляемые приборы, в момент поступления данных для вычисления пропорциональной составляющей, цифра уже меняется. И чем больше внешнее воздействие, тем сильнее происходят колебания показателя. Происходят скачки подаваемой мощности.
Интегральная составляющая пытается на основе прошлых значений температуры, вернуть её значение, если оно поменялось. Подробнее процесс описан в видео ниже.
А дальше выходной сигнал регулятора, согласно коэффициенту, подается для повышения или понижения температуры. Со временем подбирается та величина, которая компенсирует внешние факторы, и скачки исчезают.
Интеграл используется для исключения ошибок путем расчета статической погрешности. Главное в этом процессе — подобрать правильный коэффициент, иначе ошибка (рассогласование) будет влиять и на интегральную составляющую.
Третий компонент ПИД — дифференцирующий. Он предназначен для компенсации влияния задержек, возникающих между воздействием на систему и обратной реакцией. Пропорциональный регулятор подает мощность до тех пор, пока температура не достигнет нужной отметки, но при прохождении информации к прибору, особенно при больших значениях, ошибки всегда возникают. Это может привести к перегреву. Дифференциал прогнозирует отклонения, вызванные задержками или воздействием внешней среды, и снижает подаваемую мощность заранее.
Настройка ПИД регулятора
Настройка ПИД-регулятора осуществляется 2 методами:
- Синтез подразумевает вычисление параметров на основании модели системы. Такая настройка получается точной, но требует глубоких познаний теории автоматического управления. Она подвластна только инженерам и ученым. Так как необходимо снимать расходные характеристики и производить кучу расчетов.
- Ручной способ основывается на методе проб и ошибок. Для этого за основу берутся данные уже готовой системы, вносятся некоторые коррективы в один или несколько коэффициентов регулятора. После включения и наблюдений за конечным результатом проводится изменение параметров в нужном направлении. И так до тех пор, пока не будет достигнут нужный уровень работоспособности.
Теоретический метод анализа и настройки на практике применяются крайне редко, что связано с незнанием характеристик объекта управления и кучей возможных возмущающих воздействий. Более распространены экспериментальные методы на основе наблюдения за системой.
Современные автоматизированные процессы реализуются как специализированные модули под управлением программ для настройки коэффициентов регулятора.
Назначение ПИД регулятора
ПИД регулятор предназначен для поддержания на требуемом уровне некой величины — температуры, давления, уровня в резервуаре, расхода в трубопроводе, концентрации чего-либо и т.д., изменением управляющего воздействия на исполнительные механизмы, такие как автоматические регулирующие клапана, используя для этого пропорциональную, интегрирующую, дифференцирующую величины для своей настройки.
Целью использования является получение точного управляющего сигнала, который способен контролировать большие производства и даже реакторы электростанций.
Пример схемы регулирования температуры
Часто ПИД регуляторы используются при регулировке температуры, давайте на простом примере подогрева воды в ёмкости рассмотрим данный автоматический процесс.
В емкости налита жидкость, которую нужно подогреть до нужной температуры и поддерживать её на заданном уровне. Внутри бака установлен датчик измерения температуры — термопара или термометр сопротивления и напрямую связан с ПИД-регулятором.
Для подогрева жидкости будем подавать пар, как показано ниже на рисунке, с клапаном автоматического регулирования. Сам клапан получает сигнал от регулятора. Оператор вводит значение температурной уставки в ПИД-регуляторе, которую необходимо поддерживать в ёмкости.

Если настройки коэффициентов регулятора неверны, будут происходить скачки температуры воды, при этом клапан будет то полностью открыт, то полностью закрыт. В этом случае необходимо рассчитать коэффициенты ПИД регулятора и ввести их заново. Если все сделано правильно, через небольшой промежуток времени система выровняет процесс и температура в ёмкости будет поддерживаться на заданной отметке, при этом степень открытия регулирующего клапана будет находиться в среднем положении.
ПИД-регулятор своими руками / Хабр
; PID управление
CalcMainEnd:
; Вычисления, Go-Go.
CalcPid:
; 1. Eo = E | 16bit
Pid1:
MOV Err0H, ErrH
MOV Err0L, ErrL
; 2. E = Y-X | 16bit
Pid2:
CLR C
MOV A, SettingL
SUBB A, ThermoL
MOV ErrL, A
MOV A, SettingH
SUBB A, ThermoH
MOV ErrH, A
JNB OV, Pid2Ov
JB ACC.7, Pid2Max
Pid2Min:
MOV ErrL, #LOW(-500*32)
MOV ErrH, #HIGH(-500*32)
SJMP Pid2End
Pid2Max:
MOV ErrL, #LOW(500*32)
MOV ErrH, #HIGH(500*32)
SJMP Pid2End
Pid2Ov:
JNB ACC.7, Pid2OvP
Pid2OvN: ; Проверим на ограничение вниз
CLR C
MOV A, ErrL
SUBB A, #LOW(-500*32)
MOV A, ErrH
SUBB A, #HIGH(-500*32)
JNC Pid2End ; Если > -500 => всё ок
SJMP Pid2Min
Pid2OvP:
CLR C
MOV A, ErrL
SUBB A, #LOW(500*32)
MOV A, ErrH
SUBB A, #HIGH(500*32)
JNC Pid2Max ; Если < 500 => всё ок
Pid2End:
; 3. Int = Int + (E+Eo)/2 | 32bit+16bit
Pid3:
JNB PowerReady, Pid3End ; Если нет сети -- интегральную часть не копим
MOV A, ErrL
ADD A, Err0L
MOV R0, A ; временно
MOV A, ErrH
ADDC A, Err0H
MOV C, ACC.7 ; Полусумма всегда влезает в 16 бит, поэтому при сдвиге надо сохранить знак
RRC A ; Поделим без потери знака
XCH A, R0 ; A= младшая часть, R0 - старшая часть полусуммы
RRC A ; Доделили
JNB IntS, Pid3IntPos
; Int отрицательный, изменим знак для R0:A, тем самым можно будет просто сложить с Int
CLR C
CPL A
ADD A, #1
XCH A, R0
CPL A
ADDC A, #0
XCH A, R0
Pid3IntPos:
; У Int и R0:A сейчас согласованы знаки, поэтому складываем обычным образом
ADD A, IntLL
MOV IntLL, A
MOV A, IntLH
ADDC A, R0
MOV IntLH, A
MOV A, R0
JB ACC.7, Pid3Neg ; Прибавляли отрицательную разность?
; Если разность положительная, просто распространим перенос
JNC jPid3End ; Если прибавили слово и переноса небыло -- делать нам ничего не требуется.
INC IntHL ; Распространяем перенос выше
MOV A, IntHL
JNZ Pid3End ; Если перенос не ушел в 4й байт -- всё нормально
INC IntHH ; Распространяем перенос на САМЫЙ старший байт
MOV A, IntHH
JNZ Pid3End ; Если перенос не ушел еще выше -- всё нормально
MOV IntHH, #0FFh ; Если перенс был выше -- ограничиваем интеграл потолком
MOV IntHL, #0FFh
MOV IntLH, #0FFh
MOV IntLL, #0FFh
jPid3End:
SJMP Pid3End
Pid3Neg: ; Если разность отрицательная, то надо продолжать добавлять оба раза, но FFh
MOV A, IntHL
ADDC A, #0FFh
MOV IntHL, A
MOV A, IntHH
ADDC A, #0FFh
MOV IntHH, A
JC Pid3End ; Если тут был перенос, значит знак интеграла не изменился
CPL IntS ; Если переноса небыло, значит у интеграла изменился знак
CPL C ; Обратим знак получившегося числа
MOV A, #0
SUBB A, IntLL
MOV IntLL, A
MOV A, #0
SUBB A, IntLH
MOV IntLH, A
MOV A, #0
SUBB A, IntHL
MOV IntHL, A
MOV A, #0
SUBB A, IntHH
MOV IntHH, A
; так как оно стало отрицательным -- то перенос тут будет всегда
Pid3End:
; 5. cI = Int*(1/Ti) | 32*32=>32bit
Pid5: ; R3:R2:R1:R0 = Int*(1/Ti)
JB Ti_sh2, Pid5Calc ; если Ti_sh2=0, то 1/Ti=1 или Ti=0. и ничего делать не надо
MOV A, Ti_mLL
ORL A, Ti_mLH
ORL A, Ti_mHL
ORL A, Ti_mHH
JZ Pid5Zero
MOV R0, IntLL
MOV R1, IntLH
MOV R2, IntHL
MOV R3, IntHH
AJMP Pid5End
Pid5Zero:
MOV A, #0
MOV R0, A
MOV R1, A
MOV R2, A
MOV R3, A
MOV IntLL, A
MOV IntLH, A
MOV IntHL, A
MOV IntHH, A
AJMP Pid5End
Pid5Calc:
; R7:R6:R5:R4[:R3] = MULUH(Int*Ti_m) // R3 считаем как часть для округления
MOV R2, #0
;; R7:R6 = IntHH*Ti_mHH
MOV A, IntHH
MOV B, Ti_mHH
MUL AB
MOV R7, B
MOV R6, A
; R6:R5 += IntHL*Ti_mHH
MOV A, IntHL
MOV B, Ti_mHH
MUL AB
MOV R5, A
MOV A, R6
ADD A, B
MOV R6, A
MOV A, R2 ; A=0
ADDC A, R7
MOV R7, A
; R5:R4 += IntLH*Ti_mHH
MOV A, IntLH
MOV B, Ti_mHH
MUL AB
MOV R4, A
MOV A, R5
ADD A, B
MOV R5, A
MOV A, R2 ; A=0
ADDC A, R6
MOV R6, A
MOV A, R2 ; A=0
ADDC A, R7
MOV R7, A
; R4:R3 += IntLL*Ti_mHH
MOV A, IntLL
MOV B, Ti_mHH
MUL AB
MOV R3, A
MOV A, R4
ADD A, B
MOV R4, A
MOV A, R2 ; A=0
ADDC A, R5
MOV R5, A
MOV A, R2 ; A=0
ADDC A, R6
MOV R6, A
MOV A, R2 ; A=0
ADDC A, R7
MOV R7, A
;; R6:R5 += IntHH*Ti_mHL
MOV A, IntHH
MOV B, Ti_mHL
MUL AB
ADD A, R5
MOV R5, A
MOV A, R6
ADDC A, B
MOV R6, A
MOV A, R2 ; A=0
ADDC A, R7
MOV R7, A
; R5:R4 += IntHL*Ti_mHL
MOV A, IntHL
MOV B, Ti_mHL
MUL AB
ADD A, R4
MOV R4, A
MOV A, R5
ADDC A, B
MOV R5, A
MOV A, R2 ; A=0
ADDC A, R6
MOV R6, A
MOV A, R2 ; A=0
ADDC A, R7
MOV R7, A
; R4:R3 += IntLH*Ti_mHL
MOV A, IntLH
MOV B, Ti_mHL
MUL AB
MOV A, R3
MOV R3, A
MOV A, R4
ADDC A, B
MOV R4, A
MOV A, R2 ; A=0
ADDC A, R5
MOV R5, A
MOV A, R2 ; A=0
ADDC A, R6
MOV R6, A
MOV A, R2 ; A=0
ADDC A, R7
MOV R7, A
;; R5:R4 += IntHH*Ti_mLH
MOV A, IntHH
MOV B, Ti_mLH
MUL AB
ADD A, R4
MOV R4, A
MOV A, R5
ADDC A, B
MOV R5, A
MOV A, R2 ; A=0
ADDC A, R6
MOV R6, A
MOV A, R2 ; A=0
ADDC A, R7
MOV R7, A
; R4:R3 += IntHL*Ti_mLH
MOV A, IntHL
MOV B, Ti_mLH
MUL AB
ADD A, R3
MOV R3, A
MOV A, R4
ADDC A, B
MOV R4, A
MOV A, R2 ; A=0
ADDC A, R5
MOV R5, A
MOV A, R2 ; A=0
ADDC A, R6
MOV R6, A
MOV A, R2 ; A=0
ADDC A, R7
MOV R7, A
;; R4:R3 += IntHH*Ti_mLL
MOV A, IntHH
MOV B, Ti_mLL
MUL AB
ADD A, R3
MOV R3, A
MOV A, R4
ADDC A, B
MOV R4, A
MOV A, R2 ; A=0
ADDC A, R5
MOV R5, A
MOV A, R2 ; A=0
ADDC A, R6
MOV R6, A
MOV A, R2 ; A=0
ADDC A, R7
MOV R7, A
;;; Если R3 > 7F --
MOV A, R3
JNB ACC.7, Pid5Shift ; Если R3<80 -- округление не надо
ANL A, #7Fh
JZ Pid5Round ; Если = 80 -- округляем до нечетного
MOV A, #1
ADD A, R4
MOV R4, A
MOV A, R2 ; A=0
ADDC A, R5
MOV R5, A
MOV A, R2 ; A=0
ADDC A, R6
MOV R6, A
MOV A, R2 ; A=0
ADDC A, R7
MOV R7, A
SJMP Pid5Shift
Pid5Round:
MOV A, R4
ORL A, #01h
MOV R4, A
;JMP Pid5Shift
Pid5Shift:
; R3:R2:R1:R0 = (Int-R7:R6:R5:R4) >> 1
CLR C
MOV A, IntLL
SUBB A, R4
MOV R0, A
MOV A, IntLH
SUBB A, R5
MOV R1, A
MOV A, IntHL
SUBB A, R6
MOV R2, A
MOV A, IntHH
SUBB A, R7
RRC A ; >>1 без потери переноса
MOV R3, A
MOV A, R2
RRC A
MOV R2, A
MOV A, R1
RRC A
MOV R1, A
MOV A, R0
RRC A
;MOV R0, A
; R3:R2:R1:R0 += R7:R6:R5:R4
;MOV A, R0
ADD A, R4
MOV R0, A
MOV A, R1
ADDC A, R5
MOV R1, A
MOV A, R2
ADDC A, R6
MOV R2, A
MOV A, R3
ADDC A, R7
MOV R7, A
; Теперь сдвинуть вправо на sh3.
; sh3 может быть до 16 (так как у нас Ti 16разрядный; проверим необходимость сдвига на 16 бит)
MOV A, Ti_sh3
JNB ACC.4, Pid5ShiftUnder16
; Надо сдвинуть >=16 -- 2 байта сдвинем mov'ами
MOV R0, 18h+2; R2, bank 3
MOV R1, 18h+3; R3, bank 3
MOV R2, #0
MOV R3, #0
Pid5ShiftUnder16:
JNB ACC.3, Pid5ShiftUnder8
; Надо сдвинуть на >=8 -- 1 байт сдвигаем mov'ами
MOV R0, 18h+1; R1, bank 3
MOV R1, 18h+2; R2, bank 3
MOV R2, 18h+3; R3, bank 3
MOV R3, #0
Pid5ShiftUnder8:
ANL A, #07h
JZ Pid5End ; Если внутри байта двигать не надо -- всё
MOV R4, A
SJMP Pid5ShiftRight
Pid5NextShift:
CLR C
; К этому моменту C у нас еще возможнозначимый старший бит!
Pid5ShiftRight:
MOV A, R3
RRC A
MOV R3, A
MOV A, R2
RRC A
MOV R2, A
MOV A, R1
RRC A
MOV R1, A
MOV A, R0
RRC A
MOV R0, A
DJNZ R4, Pid5NextShift
; Всё, после всех сдвигов получили результат
; Не забываем, что у вычисленного в R3:R2:R1:R0
; сейчас число положительное, а знак его в IntS
Pid5End:
; 4. PID += [ cD = Td * (E-Eo) ] | 16*16=>32bit
Pid4: ; cD = R7:R6:R5:R4; ErrD = E-Eo
CLR C
MOV A, ErrL
SUBB A, Err0L
MOV DiffL, A
MOV A, ErrH
SUBB A, Err0H
MOV DiffH, A
MOV C, ACC.7 ; Берём знак результата
MOV DiffS, C ; Сохраним знак E-Eo
JNC Pid4Mul
; Diff -- орицательный, обратим знак
MOV A, DiffL
CPL A
ADD A, #1
MOV DiffL, A
MOV A, DiffH
CPL A
ADDC A, #0
MOV DiffH, A
Pid4Mul:
; R7:R6 = DiffH*TdH
; MOV A, DiffH = в любом случае A=DiffH
MOV B, TdH
MUL AB
MOV R6, A
MOV R7, B
; R5:R4 = DiffL*TdL
MOV A, DiffL
MOV B, TdL
MUL AB
MOV R4, A
MOV R5, B
; R6:R5 += DiffH*TdL
MOV A, DiffH
MOV B, TdL
MUL AB
ADD A, R5
MOV R5, A
MOV A, R6
ADD A, B
MOV R6, A
MOV A, R7
ADDC A, #0
MOV R7, A
; R6:R5 += DiffL*TdH
MOV A, DiffL
MOV B, TdH
MUL AB
ADD A, R5
MOV R5, A
MOV A, R6
ADD A, B
MOV R6, A
MOV A, R7
ADDC A, #0
MOV R7, A
; 6. PID = E + cI + cD | 32bit
Pid6: ; R3:R2:R1:R0 равно cI, знак в IntS;
; R7:R6:R5:R4 = cD; знак в DiffS
; E в обратном дополнительном коде
JB IntS, ChkDiffN
JNB DiffS, Pid6Add ; Int>0, Diff>0 => Add
SJMP Pid6Sub ; Int>0, Diff<0 => Sub
ChkDiffN:
JNB DiffS, Pid6Sub ; Int<0, Diff>0 => Sub
; Int<0, Diff<0 => Add
Pid6Add:
; Одинаковый знак => складываем их с проверкой на переполнение
MOV A, R0
ADD A, R4
MOV R0, A
MOV A, R1
ADDC A, R5
MOV R1, A
MOV A, R2
ADDC A, R6
MOV R2, A
MOV A, R3
ADDC A, R7
MOV R3, A
JNC Pid6Err ; Если нет переноса - в результате сложения переполнения небыло
MOV R3, #0FFh
MOV R2, #0FFh
MOV R1, #0FFh
MOV R0, #0FFh
SJMP Pid6Err
Pid6Sub:
; Знаки разные -- вычтем одно из другого и проверим знак результата
CLR C
MOV A, R4
SUBB A, R0
MOV R0, A
MOV A, R5
SUBB A, R1
MOV R1, A
MOV A, R6
SUBB A, R2
MOV R2, A
MOV A, R7
SUBB A, R3
MOV R3, A
JNC Pid6Err ; Если нет заимствования -- знак результата равен знаку DiffS
CPL DiffS ; Если заимствование было, у DiffS и результата надо обратить знак
MOV R6, #0 ; R6=0
MOV A, R0
CPL A
ADDC A, R6 ; R6=0, C=1 => действие +1
MOV R0, A
MOV A, R1
CPL A
ADDC A, R6 ; +перенос
MOV R1, A
MOV A, R2
CPL A
ADDC A, R6
MOV R2, A
MOV A, R3
CPL A
ADDC A, R6
MOV R3, A
Pid6Err:
MOV R6, #0 ; R6=0
; В R3:R2:R1:R0 -- лежит cI+cD; знак суммы в DiffS
; надо прибавить/отнять Err, записанное в обратном коде
; Приведём знак Err к DiffS
MOV R4, ErrL
MOV A, ErrH
JB ACC.7, Pid6ChkDiffS
JNB DiffS, Pid6SumErrNoInv ; Err>0, Diff>0 => NoInv
SJMP Pid6SumErrInv
Pid6ChkDiffS:
JNB DiffS, Pid6SumErrNoInv ; Err<0, Diff>0 => NoInv
Pid6SumErrInv:
; У Err знак отличается от DiffS -- инвертируем
SETB C ; Не уверен в состоянии C
MOV A, ErrL
CPL A
ADDC A, R6 ; A+=R6+C, R6=0 C=1 => A+=1
MOV R4, A ; R4=ErrL
MOV A, ErrH
CPL A
ADDC A, R6
Pid6SumErrNoInv:
MOV R5, A ; ErrH
Pid6SumErr:
; Итак, в R5:R4 лежит Err, знак которого согласован с DiffS; но в обратно-дополнительном коде
MOV A, R0
ADD A, R4
MOV R0, A
MOV A, R5
CLR F0
JNB ACC.7, Pid6SubErrPos
SETB F0
MOV R6, #0FFh ; Добавляем отрицательное => дополняем FFами
Pid6SubErrPos:
ADDC A, R1
MOV R1, A
MOV A, R2
ADDC A, R6 ; +расширение
MOV R2, A
MOV A, R3
ADDC A, R6 ; +расширение
MOV R3, A
MOV R6, #0
; Надо проверить нет ли смены знака итоговой суммы
JNC Pid6ChkF0
JB F0, Pid7 ; Err<0, был перенос => Знак не сменился, переполнения нет
SJMP Pid6SumOv ; Err>0, был перенос => переполнение
Pid6ChkF0:
JNB F0, Pid7 ; Err>0, небыло переноса => нет переполнения
;SJMP Pid6SumUf ; Err<0, небыло переноса => сменился знак
Pid6SumUf:
; Если Err<0 и небыло переноса => сменился знак
CPL DiffS
MOV A, R0
CPL A
ADD A, #1 ; C=?, поэтому прибавляем 1 обычным методом
MOV R0, A
MOV A, R1
CPL A
ADDC A, R6
MOV R1, A
MOV A, R2
CPL A
ADDC A, R6
MOV R2, A
MOV A, R3
CPL A
ADDC A, R6
MOV R3, A
SJMP Pid7 ; Знак у результата и DiffS приведены в норму
Pid6SumOv:
; Было переполнение => округляем до максимума
MOV R0, #0FFh
MOV R1, #0FFh
MOV R2, #0FFh
MOV R3, #0FFh
; 7. U = K*PID/256 | 32bit*16bit/8bit => 40bit,
; | которые усекаются до 10bit
; | при вычислениях
Pid7: ; В R3:R2:R1:R0 лежит результат PID, в DiffS его знак
; Нужно вычислить K*PID/256, ограничив результат до 10бит
; K всегда положительно, поэтому если PID < 0 => минимум
JB DiffS, Pid7Umin
; поскольку мы можем жестко ограничить сверху 16ю битами,
; то если R3 != 0 => ставим максимум в любом случае
MOV A, R3
JNZ Pid7Umax
; [R2:R1:R0 * KH:HL] = [R7:R6:R5:R4:R3]
; вычисляем, учитывая что должно получиться R7=0 R6=0,
; иначе переполнение, поэтому R7 и R6 вообще не трогаем
; но проверяем результат
; R7:R6 = R2*KH
MOV A, R2
JZ Pid7S1
MOV A, KH
JNZ Pid7Umax ; Если R2!=0 и KH!=0 => R7:R6>0 => переполнение
Pid7S1:
; R6:R5 = R2*KL
MOV A, R2
MOV B, KL
MUL AB
MOV R5, A
MOV A, B
JNZ Pid7Umax ; Если R6 > 0 => переполнение
; R6:R5 = R1*KH
MOV A, R1
MOV B, KH
MUL AB
ADD A, R5
JC Pid7Umax ; Если R6 > 0 => переполнение
MOV R5, A
MOV A, B
JNZ Pid7Umax ; Если R6 > 0 => переполнение
; R5:R4 = R0*KH
MOV A, R0
MOV B, KH
MUL AB
MOV R4, A
MOV A, R5
ADD A, B
JC Pid7Umax ; Если R6 > 0 => переполнение
MOV R5, A
; R5:R4 = R1*KL
MOV A, R1
MOV B, KL
MUL AB
ADD A, R4
MOV R4, A
MOV A, R5
ADDC A, B
JC Pid7Umax ; Если R6 > 0 => переполнение
MOV R5, A
; R4:R3 = R0*KL
MOV A, R0
MOV B, KL
MUL AB
RLC A ; C = R3>=0x80, Z=R3>0x80
MOV R3, #0FFh ; R3<>0x80 => ничего
JNZ Pid7S2
MOV R3, #0FEh ; R3==0x80 => округление до четного
Pid7S2:
MOV A, R4
ADDC A, B ; Складываем умножение, регистр, и перенос-округление
ANL A, R3 ; А так же если округление до четного -- отбрасываем после младший бит
MOV R4, A
MOV A, R5
ADDC A, R6 ; R6=0 у нас с давних пор, хоть мы туда и не складывали ничего во время перемножения
JC Pid7Umax ; Если R6 > 0 => переполнение
MOV R5, A
; R5:R4 => ограниченный в 16 бит результат
; Теперь надо ограничить R5:R4 до Umax/Umin
MOV A, UmaxL
SUBB A, R4 ; C=0 на текущий момент
MOV A, UmaxH
SUBB A, R5
JC Pid7Umax ; Если R5:R4>Umax => R5:R4 = Umax
MOV A, UminL
SUBB A, R4 ; C=0 на текущий момент
MOV A, UminH
SUBB A, R5
JNC Pid7Umin ; Если R5:R4<Umin => R5:R4 = Umin
; Мощность вычислена
MOV UH, R5
MOV UL, R4
SETB UReady
AJMP CalcExit
Pid7Umax: ; Установить максимальную мощность
MOV UH, UmaxH
MOV UL, UmaxL
SETB UReady
AJMP CalcExit
Pid7Umin: ; Установить минимальную мощность
MOV UH, UminH
MOV UL, UminL
SETB UReady
AJMP CalcExit
Принцип работы ПИД-регуляторов
Принцип работы
Регуляторы процесса
Регуляторы процесса (Process Controllers) – это параметрируемые цифровые контроллеры со встроенным
набором стандартных функций для регулирования технологических переменных (температуры, давления и т.п.).
В качестве сигналов задания (Reference) могут использоваться как фиксированные уставки (Fixed Setpoints),
так и внешние (External).
Аналоговые входы используются для подключения датчиков обратной связи (термометров сопротивления, термопар,
манометров и т.п.).
Дискретные входы используются для задания фиксированных уставок и переключения между режимами.
Дискретные выходы используются для сигнализации: готовности, аварий, состояния.
Релейные выходы используются для дискретного управления, а аналоговые выходы – для непрерывного управления.
Дискретное управление
- 2-х позиционный регулятор использует только 2 состояния:
- включено (открыто)
- выключено (закрыто)
- 3-х позиционный регулятор использует 3 состояния:
- выключено
- вращение по часовой стрелке
- вращение против часовой стрелки (реверс)
- 5-и позиционный регулятор использует 5 состояний:
- выключено
- вращение на первой скорости по часовой стрелке
- вращение на второй скорости по часовой стрелке
- вращение на первой скорости против часовой стрелки
- вращение на второй скорости против часовой стрелки
Пример: управление нагреванием или охлаждением.
Пример: управление реверсивным электродвигателем.
Пример: управление 2-скоростным реверсивным двигателем.
Непрерывное управление
Для непрерывного управления используются ПИД-регуляторы.
Возможна реализация каскадного (подчинённого) управления.
Замкнутая система управления

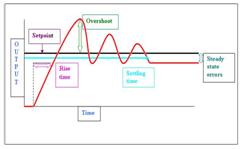
Переходный процесс
Переходный процесс – это реакция системы на внешнее воздействие (задание, возмущение).
Неустойчивый (расходящийся) переходный процесс

Устойчивый (сходящийся) переходный процесс
 |  |  |
| Колебательный | Апериодический | Монотонный |
ПИД-регулятор
С помощью настройки ПИД-регулятора (PID-controller) мы можем скорректировать переходный процесс так,
как нам нужно для решения своей задачи.

Хзад – заданное (желаемое) значение выходной переменной
Xmax – верхний допустимый предел выходной переменной
Xmin – нижний допустимый предел выходной переменной
Т – период колебаний
Тн – время нарастания
Тр – время переходного процесса (последняя точка пересечения кривой с Xmin или Xmax)
А1 – первое перерегулирование
А2 – второе перерегулирование
d=А1/A2 — степень (декремент) затухания переходного процесса (отношение первого перерегулирования ко второму)
Рассогласование, перерегулирование, время нарастания, время переходного процесса, степень
затухания характеризуют качество регулирования.
Пример
ПИД-регулятор открывает и закрывает регулирующий вентиль на горячей трубе так, чтобы из крана текла
вода с температурой +40°С с погрешностью плюс-минус 2 градуса.
Регулятор вычисляет рассогласование (ошибку) — отклонение реальной температуры (например, +20°С) от
заданного значения (+40°С) и решает – когда и насколько необходимо приоткрыть горячий вентиль,
чтобы температура повысилась на 20С.
Реальную (фактическую) температуру регулятор узнаёт с помощью датчика температуры (обратная связь),
а заданную температуру (уставку) ему сообщает оператор, например, набирая число «40» на своём ПК.
Чтобы настроить ПИД-регулятор, необходимо подобрать правильную комбинацию трёх коэффициентов:
- Пропорционального – Kp
- Интегрального – Ki
- Дифференциального – Kd
Могут использоваться и более простые — П и ПИ-регуляторы.
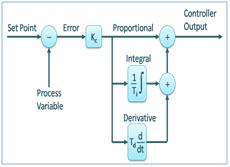
Формула ПИД-регулятора

где e(t) — ошибка (рассогласование), u(t) — выходной сигнал регулятора (управляющее воздействие).
Чем больше Пропорциональный коэффициент, тем выше быстродействие, но меньше запас устойчивости.
Но! простой П-регулятор не может полностью отработать рассогласование, т.е. всегда работает с ошибкой.
ПИ-регулятор позволяет избавиться от статической (установившейся) ошибки, но, чем больше Интегральный коэффициент,
тем больше перерегулирование (динамическая ошибка).
ПИД-регулятор позволяет нам уменьшить перерегулирование, но, чем больше Дифференциальный коэффициент,
тем больше погрешность из-за влияния шумов.
Если шумы идут по каналу обратной связи, то мы можем их отфильтровать с помощью фильтра низкой частоты,
но чем больше постоянная этого фильтра, тем медленнее регулятор будет отрабатывать возмущения.
Настройка ПИД-регулятора по методу Циглера-Николса
Циглер и Николс предложили свой вариант быстрой настройки ПИД-регулятора для периодического переходного процесса,
в котором затухание примерно равно 4.
- Обнуляем Ki и Kd
- Постепенно увеличиваем Kp до критического значения Kc, при котором возникают автоколебания
- Измеряем период автоколебаний Т
- Вычисляем значения Kp, Ki и Kd по разным формулам для разных регуляторов:
- для П-регулятора: Kp=0,50*Kc
- для ПИ-регулятора: Kp=0,45*Kc, Ki=1,2*Kp/T
- для ПИД-регулятора: Kp=0,60*Kc, Ki=2,0*Kp/T,
Kd=Kp*T/8
Каскадный регулятор (подчинённое управление)
Продолжение примера
Теперь нам захотелось добавить комфорта и сделать так, чтобы уставка задания температуры воды менялась
в зависимости от температуры воздуха на улице (на улице мороз – вода горячая, на улице жара – вода прохладная).
Можно установить ещё один регулятор комфортной температуры, который по показаниям термометра узнаёт
фактическую температура наружного воздуха и решает, что комфортная температура воды должна быть, например, +40°С,
поэтому он выдаёт задание регулятору температуры воды – поддерживать температуру на уровне +40С (см. пример выше).
Здесь мы имеем каскадное регулирование: контур регулирования температуры воды подчинён контуру регулирования
комфортной температуры воды.
С помощью регуляторов процесса мы можем реализовать и более сложные связи.
Например, поддерживать постоянный расход и температуру воды, независимо от давления и температуры
горячего и холодного трубопроводов.
Упреждающее регулирование (Feedforward Control)
Не всегда простой ПИД-регулятор в системе с обратной связью может обеспечить требуемое быстродействие
из-за возникновения нежелательных колебаний или недопустимо большого перерегулирования.
Для улучшения характеристик регулирования применяют комбинированное управление – с обратной связью
(closed-loop) и без обратной связи (open-loop). К управляющему воздействию (выходу регулятора)
добавляется сигнал упреждающего воздействия, который не зависит от рассогласования, а значит,
не может вызвать автоколебания в системе.
Продолжение примера
Если мы доверяем прогнозу погоды, то вместо каскадного управления мы можем реализовать упреждающее
регулирование без измерения уличной температуры: читаем прогноз на завтра, задаём уставку +40°С по таймеру времени
на завтра на 7 утра.
Если измерить возмущение, то можно подать упреждающее воздействие, которое компенсирует влияние
этого возмущения на процесс до того, как начнёт изменяться регулируемый параметр.
ПИД регулирование для чайников
Не знаю имеется ли в этом смысл но вот:
Закончил специальность АТП — автоматизирование технологических процессов, расчет регуляторов является большей частью для моей специальности.
Выходная точность зависит от 2 компонентов — качества измерительной техники и качества управляющей техники.
Измерительная составляющая.
Термистор EPCOS NTC G560 100K — такой стоит у меня в принтере.
Имеет класc точности (1), при разбросе измеряемых температур 355 имеет погрешность в 3,55 градуса.
Номинальное сопротивление имеет 100 ом — это сопротивление при 23.5 градусах, замеряется скорее всего ток (так как плата имеет источник напряжение на входовыходах), в среднем типовые амперметры имеют класс точности 1,5 — это 200мА и 3мА погрешности (1 — 1,5 градуса).
В сумме имеем погрешность в 5 градусов Цельсия.
Управляющий механизм.
Немного полиграфии:
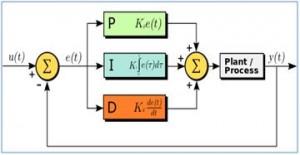
Пропорционально-интегро-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
И по делу:
Пропорциональная составляющая в логическом смысле нас не интересует.
Интегральная составляющая нужна для устранения статической ошибки (без нее регулируемая величина может иметь фиксированное отклонение, что-то вроде +5 градусов на все время регулирования).
Дифференциальная составляющая — это достаточно забавный способ регулирования. Для расчета значения в момент времени Т, она использует значение величины в момент времени Т+1. С математической точки зрения проблем нет, но в реальной жизни будущее значение нам не известно, и в реальности дифференциальная составляющая идет с задержкой по времени. Поясняю в момент времени Т мы исполняем расчетное изменения для момента Т-1. Дифференциальная составляющая собственно и регулирует.
Это был небольшой вводный курс в ТАУ.
Есть множество вариантов расчетов ПИД регуляторов, чаще всего используют метод Зиглера, есть уже готовые калькуляторы на матлабе и маткаде.
Если бы мы имели большую вычислительную емкость, на нашей плате, можно было бы использовать опытную схему регулирования (гигантские таблицы с входными изменениями и ответной регулировкой на них). Самый оптимум так как там можно задать воздействия куллера.
Подведу итог : Погрешность измерительных приборов и датчиков сводит на нет точность настройки ПИД регулятора, Если вы закажете высокоточные датчики сразу с преобразованием в hart протокол, rs232 или какой либо еще, и сможете настроить его на своей плате, у вас появится смысл точной (до 0,02) настройки ПИД. Самый легкий способ — пойти в вуз в котором преподают ТАУ (нефтяные, производственные направления) и заплатить преподавателю за расчет с настройкой (не обращайтесь к студентам они все под ответ подгоняют — ТАУ никогда не сходится).
Наиболее удачным вариантом для стабилизации температуры — это материал сопла с высокой теплоемкостью (будет долго нагревается но и колебаться температура будет меньше). Из опыта могу предложить изолировать сопло от ветра(хоть тем же каптоновым скотчем слоев на 20).
Надеюсь я ответил на большинство вопросов по этой теме.
так ли страшен чёрт, как его малюют? Часть 1. Одноконтурная система / Блог компании ЦИТМ Экспонента / Хабр
Эта статья открывает цикл статей, посвященных автоматизированным способам настройки ПИД-регуляторов в среде Simulink. Сегодня разберемся, как работать с приложением PID Tuner.
Введение
Наиболее популярным типом применяемых в промышленности регуляторов в системах управления замкнутыми системами можно считать ПИД-регуляторы. И если структуру и принцип действия контроллера инженеры помнят еще со студенческой скамьи, то его настройка, т.е. расчет коэффициентов регулятора, до сих пор является проблемой. Существует огромное количество литературы, как зарубежной (например, [1, 2]), так и отечественной (например, [3, 4]), где настройка регуляторов объясняется на достаточно непростом языке теории автоматического управления.
В этой серии статей будут описываться автоматизированные способы настройки ПИД-регуляторов с помощью инструментов среды Simulink, таких как:
- PID Tuner,
- Response Optimizer,
- Control System Tuner,
- Frequency Response Based PID Tuner,
- Closed-Loop PID Autotuner.
В качестве объекта системы управления будет выступать электропривод на базе двигателя постоянного тока с возбуждением от постоянных магнитов, работающий совместно с редуктором на инерционную нагрузку, со следующими параметрами:
Параметры нагрузки и редуктора:
- момент инерции нагрузки, ;
- передаточное число редуктора, .
Статьи практически не содержат математических формул, однако желательно, чтобы читатель обладал базовыми знаниями в теории автоматического управления, а также имел опыт моделирования в среде Simulink для понимания предлагаемого материала.
Модель системы
Рассмотрим линейную систему управления угловой скоростью следящего электропривода, упрощенная структурная схема которой представлена ниже.
В соответствии с приведенной структурой в среде Simulink была построена модель такой системы.
Модели электропривода (подсистема Electric actuator) и инерционной нагрузки (подсистема Load) созданы с помощью блоков библиотеки физического моделирования Simscape:
- модель электропривода,
- модель инерционной нагрузки.
Модели электропривода и нагрузки также включают подсистемы датчиков различных физических величин:
- тока, протекающего в обмотке якоря двигателя (подсистема А),
- напряжения на его обмотке (подсистема V),
- угловой скорости объекта управления (подсистема Ω).
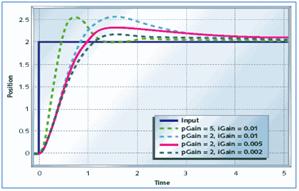
Перед настройкой параметров ПИД-регулятора запустим модель на расчет, приняв передаточную функцию регулятора . Результаты моделирования при отработке входного сигнала 150 об/мин показаны ниже.
Из анализа приведенных графиков видно, что:
- Выходная координата системы управления не достигает заданного значения, т.е. в системе присутствует статическая ошибка.
- Напряжение на обмотках двигателя достигает значения 150 В в начале моделирования, что повлечет за собой выход его из строя вследствие подачи на его обмотку напряжения больше номинального (24 В).
Пусть реакция системы на единичный импульс должна соответствовать следующим требованиям:
- перерегулирование (Overshoot) не более 10%,
- время нарастания (Rise time) менее чем 0.8 с,
- время переходного процесса (Settling time) менее чем 2 с.
Кроме того, регулятор должен ограничивать напряжение, подаваемое на обмотку двигателя, до значения напряжения питания.
Настраиваем контроллер
Настройка параметров регулятора осуществляется с помощью инструмента PID Tuner, который доступен непосредственно в окне параметров блока PID Controller.
Приложение запускается нажатием на кнопку Tune…, расположенную на панели Automated tuning. Стоит отметить, что до выполнения этапа настройки параметров контроллера необходимо выбрать его вид (П, ПИ, ПД и др.), а также его тип (аналоговый или дискретный).
Поскольку одним из требований является ограничение его выходной координаты (напряжения на обмотке двигателя), то следует задать допустимый диапазон напряжений. Для этого:
- Переходим во вкладку Output Saturation.
- Нажимаем на флаговую кнопку Limit output, в результате чего активируются поля для задания верхней (Upper limit) и нижней (Lower limit) границы диапазона выходной величины.
- Устанавливаем границы диапазона.
Корректная работа блока регулятора в составе системы предполагает использования методов, направленных на борьбу с интегральным насыщением. В блоке реализованы два метода: back-calculation и clamping. Подробная информация о данных методах располагается здесь. Выпадающее меню выбора метода расположено на панели Anti-windup.
В рассматриваемом случае запишем значения 24 и -24 в поля Upper limit и Lower limit соответственно, а также используем метод clamping для исключения интегрального насыщения.
Можно заметить, что внешний вид блока регулятора изменился: появился знак насыщения рядом с выходным портом блока.
Далее, приняв все изменения нажатием кнопки Apply, возвращаемся во вкладку Main и нажимаем кнопку Tune…, в результате чего откроется новое окно приложения PIDTuner.
В графической области окна отображаются два переходных процесса: при текущих параметрах регулятора, т.е. для ненастроенного регулятора, и при значениях, подобранных автоматически. Новые значения параметров можно посмотреть, нажав на кнопку Show Parameters, расположенную на панели инструментов. При нажатии на кнопку появятся две таблицы: подобранные параметры регулятора (Controller Parameters) и произведенные оценки характеристик переходного процесса при подобранных параметрах (Performance and Robustness).
Как видно из значений второй таблицы, автоматически рассчитанные коэффициенты регулятора удовлетворяют всем требованиям.
Настройка регулятора завершается нажатием на кнопку с зеленым треугольником, расположенной справа от кнопки Show Parameters, после чего новые значения параметров автоматически изменятся в соответствующих полях в окне настройки параметров блока PID Controller.
Результаты моделирования системы с настроенным регулятором для нескольких входных сигналов показаны ниже. При больших уровнях входных сигналов (голубая линия) система будет работать в режиме с насыщением по напряжению.
Отметим, что инструмент PID Tuner подбирает коэффициенты регулятора по линеаризованной модели, поэтому при переходе к нелинейной модели требуется уточнять его параметры. В этом случае можно воспользоваться приложением Response Optimizer.
Литература
- Handbook of PI and PID Controller Tuning Rules. Aidan O’Dwyer
- PID Control System Design and Automatic Tuning using MATLAB, Simulink. Wang L.
- ПИД-управление в нестрогом изложении. Карпов В.Э.
- ПИД-регуляторы. Вопросы реализации. Части 1, 2. Денисенко В.
Пид регулирование пид регулятор на практических примерах
Среди множества приборов, предназначенных для коммутации, управления и выполнения других функций хочется отметить ПИД-регулятор, используемый в цепях обратной связи. Он устанавливается в системы с автоматическим управлением и поддерживает на определенном уровне значение какого-либо параметра. В большинстве случаев ПИД-регулятор участвует в регулировке температурных режимов и других величин, участвующих в различных процессах.
Общие сведения о ПИД-регуляторе
Аббревиатура ПИД происходит от английского понятия PID, и расшифровывается как Proportional, Integral, Derivative. На русском языке это сокращение включает в себя три компонента или составляющие: пропорциональную, интегрирующую, дифференцирующую.
Принцип работы ПИД-регулятора наилучшим образом подходит для контуров управления, схема которых оборудована звеньями обратной связи. В первую очередь, это различные автоматические системы где формируются сигналы управления, обеспечивающие высокое качество и точность переходных процессов.
В состав управляющего сигнала ПИД-регулятора входят три основных компонента, складывающиеся между собой. Каждый из них находится в пропорции с определенной величиной:
- Первый – с сигналом рассогласования.
- Второй – с интегралом сигнала рассогласования.
- Третий – с производной сигнала рассогласования.
Если какой-либо компонент выпадет из этого процесса, то данный регулятор уже не будет представлять собой ПИД. В этом случае его схема будет просто пропорциональной, пропорционально-дифференцирующей, пропорционально-интегрирующей.
Поскольку эти приборы чаще всего используются для поддержания заданного уровня температуры, в том числе для чайников, целесообразно ПИД-регулятор рассматривать на практических примерах именно в этом ракурсе.
В самом процессе будет участвовать объект, на котором должна поддерживаться заданная температура. Все регулировки осуществляются извне. Другой составляющей будет само устройство с микроконтроллером, которое непосредственно решает имеющуюся задачу. Через измеритель на контроллер поступают данные об уровне температуры на данный момент. Мощность нагревателя отдельно контролируется специальным устройством. Для того чтобы установить требуемое значение параметров температуры, микроконтроллер нужно подключить к компьютеру.
Таким образом, исходными данными служат следующие температурные показатели: текущее значение и уровень, до которого должен нагреться или остыть рассматриваемый объект. На выходе должна получиться величина мощности, передаваемой к нагревательному элементу. Именно она обеспечивает необходимый температурный режим, позволяющий выполнить поставленную задачу. Для ее решения будут задействованы все три компонента, рассмотренные выше.
Три составляющих рабочего процесса ПИД-регулятора
Формирование выходного сигнала осуществляет пропорциональная составляющая. Данный сигнал удерживает входную величину, подлежащую регулировке, на нужном уровне и не дает ей отклоняться. С повышением этого отклонения возрастает и уровень сигнала.
Если на входе регулируемая величина сравняется с заданным значением, то уровень выходного сигнала будет равен нулю. Однако на практике невозможно отрегулировать нужную величину с помощью лишь одной пропорциональной составляющей и стабилизировать ее на определенном уровне. Всегда существует вероятность статической ошибки, равной величине отклонения, поэтому стабилизация выходного сигнала останавливается на этом значении.
Данная проблема решается за счет использования второго, интегрирующего компонента. Его основным элементом является интеграл по времени, взятый от общей величины рассогласования. То есть, интегральная составляющая находится в пропорции с этим интегралом. Данный компонент способен ликвидировать статическую ошибку, так как регулятор постепенно накапливает учет статической погрешности.
Таким образом, при отсутствии внешних воздействий, через определенный период времени регулируемая величина будет приведена в стабильное состояние на отметке правильного значения. В этом случае величина пропорциональной составляющей будет нулевой, а интегрирующая полностью обеспечивает точность выходных данных. Однако и она может вызвать неточности, требующие исправления, в случае неправильного выбора коэффициента.
Эти отклонения устраняются за счет третьих – дифференциальных составляющих, пропорциональных с темпом изменяющегося отклонения величины. Она препятствует отклонениям, возможным в перспективе под влиянием задержек или внешних воздействий. Все три компонента дискретно связаны между собой.
Теория и практика использования ПИД-устройств
ПИД-регулятор температуры способен поддерживать заданное значение какой-то величины на протяжении определенного промежутка времени. С этой целью используется изменение напряжения и других величин, которые можно рассчитать по специальным формулам. При этом учитывается величина уставки и заданного значения, а также разница или рассогласование.
1.
2.
В идеальном варианте напряжение u задается с помощью формулы 1. В ней хорошо просматриваются коэффициенты пропорциональности ПИД-регулятора, предусмотренные для каждого компонента. На практике используется другая формула 2 с коэффициентом усиления, подходящим к любому из трех составляющих.
На практике ПИД-регулирование систем в теоретическом плане анализируются довольно редко. Это связано с недостатком информации о характеристиках регулируемого объекта, нелинейностью и нестабильностью всей системы, когда невозможно использовать дифференцирующий компонент.
Рабочий диапазон устройств, функционирующих на практике, обычно ограничивается верхним и нижним пределами. В связи с нелинейностью, каждая настройка выполняется экспериментально, при подключении объекта к системе управления.
Величина, образуемая с помощью программного алгоритма управления, имеет специфические особенности. Например, для нормальной регулировки температуры может потребоваться вместо одного сразу два прибора: один будет управлять нагревом, а другой – охлаждением. В первом случае осуществляется подача разогретого теплоносителя, а во втором – хладагента. Самым современным прибором считается цифровой ПИД-регулятор, воплотивший в своей конструкции все варианты практических регулировочных решений.
Принцип работы
Регуляторы процесса
Регуляторы процесса (Process Controllers) – это параметрируемые цифровые контроллеры со встроенным набором стандартных функций для регулирования технологических переменных (температуры, давления и т.п.).
В качестве сигналов задания (Reference) могут использоваться как фиксированные уставки (Fixed Setpoints), так и внешние (External).
Аналоговые входы используются для подключения датчиков обратной связи (термометров сопротивления, термопар, манометров и т.п.).
Дискретные входы используются для задания фиксированных уставок и переключения между режимами.
Дискретные выходы используются для сигнализации: готовности, аварий, состояния.
Релейные выходы используются для дискретного управления, а аналоговые выходы – для непрерывного управления.
Дискретное управление
- 2-х позиционный регулятор использует только 2 состояния:
- включено (открыто)
- выключено (закрыто) Пример: управление нагреванием или охлаждением.
Непрерывное управление
Для непрерывного управления используются ПИД-регуляторы. Возможна реализация каскадного (подчинённого) управления.
Замкнутая система управления
Переходный процесс
Переходный процесс – это реакция системы на внешнее воздействие (задание, возмущение).
Неустойчивый (расходящийся) переходный процесс
Устойчивый (сходящийся) переходный процесс
| Колебательный | Апериодический | Монотонный |
ПИД-регулятор
С помощью настройки ПИД-регулятора (PID-controller) мы можем скорректировать переходный процесс так, как нам нужно для решения своей задачи.
Хзад – заданное (желаемое) значение выходной переменной
Xmax – верхний допустимый предел выходной переменной
Xmin – нижний допустимый предел выходной переменной
Т – период колебаний
Тн – время нарастания
Тр – время переходного процесса (последняя точка пересечения кривой с Xmin или Xmax)
А1 – первое перерегулирование
А2 – второе перерегулирование
d=А1/A2 — степень (декремент) затухания переходного процесса (отношение первого перерегулирования ко второму)
Рассогласование, перерегулирование, время нарастания, время переходного процесса, степень затухания характеризуют качество регулирования.
Пример
ПИД-регулятор открывает и закрывает регулирующий вентиль на горячей трубе так, чтобы из крана текла вода с температурой +40°С с погрешностью плюс-минус 2 градуса. Регулятор вычисляет рассогласование (ошибку) — отклонение реальной температуры (например, +20°С) от заданного значения (+40°С) и решает – когда и насколько необходимо приоткрыть горячий вентиль, чтобы температура повысилась на 20С. Реальную (фактическую) температуру регулятор узнаёт с помощью датчика температуры (обратная связь), а заданную температуру (уставку) ему сообщает оператор, например, набирая число «40» на своём ПК.
Чтобы настроить ПИД-регулятор, необходимо подобрать правильную комбинацию трёх коэффициентов:
- Пропорционального – Kp
- Интегрального – Ki
- Дифференциального – Kd
Могут использоваться и более простые — П и ПИ-регуляторы.
Формула ПИД-регулятора
где e(t) — ошибка (рассогласование), u(t) — выходной сигнал регулятора (управляющее воздействие).
Чем больше Пропорциональный коэффициент, тем выше быстродействие, но меньше запас устойчивости. Но! простой П-регулятор не может полностью отработать рассогласование, т.е. всегда работает с ошибкой.
ПИ-регулятор позволяет избавиться от статической (установившейся) ошибки, но, чем больше Интегральный коэффициент, тем больше перерегулирование (динамическая ошибка).
ПИД-регулятор позволяет нам уменьшить перерегулирование, но, чем больше Дифференциальный коэффициент, тем больше погрешность из-за влияния шумов.
Если шумы идут по каналу обратной связи, то мы можем их отфильтровать с помощью фильтра низкой частоты, но чем больше постоянная этого фильтра, тем медленнее регулятор будет отрабатывать возмущения.
Настройка ПИД-регулятора по методу Циглера-Николса
Циглер и Николс предложили свой вариант быстрой настройки ПИД-регулятора для периодического переходного процесса, в котором затухание примерно равно 4.
- Обнуляем Ki и Kd
- Постепенно увеличиваем Kp до критического значения Kc, при котором возникают автоколебания
- Измеряем период автоколебаний Т
- Вычисляем значения Kp, Ki и Kd по разным формулам для разных регуляторов:
- для П-регулятора: Kp=0,50*Kc
- для ПИ-регулятора: Kp=0,45*Kc, Ki=1,2*Kp/T
- для ПИД-регулятора: Kp=0,60*Kc, Ki=2,0*Kp/T, Kd=Kp*T/8
Каскадный регулятор (подчинённое управление)
Продолжение примера
Теперь нам захотелось добавить комфорта и сделать так, чтобы уставка задания температуры воды менялась в зависимости от температуры воздуха на улице (на улице мороз – вода горячая, на улице жара – вода прохладная). Можно установить ещё один регулятор комфортной температуры, который по показаниям термометра узнаёт фактическую температура наружного воздуха и решает, что комфортная температура воды должна быть, например, +40°С, поэтому он выдаёт задание регулятору температуры воды – поддерживать температуру на уровне +40С (см. пример выше). Здесь мы имеем каскадное регулирование: контур регулирования температуры воды подчинён контуру регулирования комфортной температуры воды.
С помощью регуляторов процесса мы можем реализовать и более сложные связи. Например, поддерживать постоянный расход и температуру воды, независимо от давления и температуры горячего и холодного трубопроводов.
Упреждающее регулирование (Feedforward Control)
Не всегда простой ПИД-регулятор в системе с обратной связью может обеспечить требуемое быстродействие из-за возникновения нежелательных колебаний или недопустимо большого перерегулирования. Для улучшения характеристик регулирования применяют комбинированное управление – с обратной связью (closed-loop) и без обратной связи (open-loop). К управляющему воздействию (выходу регулятора) добавляется сигнал упреждающего воздействия, который не зависит от рассогласования, а значит, не может вызвать автоколебания в системе.
Продолжение примера
Если измерить возмущение, то можно подать упреждающее воздействие, которое компенсирует влияние этого возмущения на процесс до того, как начнёт изменяться регулируемый параметр.
Как выбрать
Окружающая среда
- Температура
- Влажность
- Класс взрывозащиты
- Степень защиты корпуса.
Регулирование
- Тип регулятора
- 2-х позиционный
- 3-х позиционный
Коммуникационный интерфейс
- HART
- FOUNDATION Fieldbus
- PROFIBUS PA.
Дифференциальный пропорционально-интегральный регулятор – устройство, которое устанавливают в автоматизированных системах для поддержания заданного параметра, способного к изменениям.
На первый взгляд все запутанно, но можно объяснить ПИД регулирование и для чайников, т.е. людей, не совсем знакомых с электронными системами и приборами.
Что такое ПИД регулятор?
ПИД регулятор – прибор, встроенный в управляющий контур, с обязательной обратной связью. Он предназначен для поддержания установленных уровней задаваемых величин, например, температуры воздуха.
Устройство подает управляющий или выходной сигнал на устройство регулирования, на основании полученных данных от датчиков или сенсоров. Контроллеры обладают высокими показателями точности переходных процессов и качеством выполнения поставленной задачи.
Три коэффициента ПИД регулятора и принцип работы
Работа ПИД-регулятора заключается в подаче выходного сигнала о силе мощности, необходимой для поддержания регулируемого параметра на заданном уровне. Для вычисления показателя используют сложную математическую формулу, в составе которой есть 3 коэффициента – пропорциональный, интегральный, дифференциальный.
Возьмем в качестве объекта регулирования ёмкость с водой, в которой необходимо поддерживать температуру на заданном уровне с помощью регулирования степени открытия клапана с паром.
Пропорциональная составляющая появляется в момент рассогласования с вводными данными. Простыми словами это звучит так – берется разница между фактической температурой и желаемой, умножается на настраиваемый коэффициент и получается выходной сигнал, который должен подаваться на клапан. Т.е. как только градусы упали, запускается процесс нагрева, поднялись выше желаемой отметки – происходит выключение или даже охлаждение.
Дальше вступает интегральная составляющая, которая предназначена для того, чтобы компенсировать воздействие окружающей среды или других возмущающих воздействий на поддержание нашей температуры на заданном уровне. Поскольку всегда присутствуют дополнительные факторы, влияющие на управляемые приборы, в момент поступления данных для вычисления пропорциональной составляющей, цифра уже меняется. И чем больше внешнее воздействие, тем сильнее происходят колебания показателя. Происходят скачки подаваемой мощности.
Интегральная составляющая пытается на основе прошлых значений температуры, вернуть её значение, если оно поменялось. Подробнее процесс описан в видео ниже.
А дальше выходной сигнал регулятора, согласно коэффициенту, подается для повышения или понижения температуры. Со временем подбирается та величина, которая компенсирует внешние факторы, и скачки исчезают.
Интеграл используется для исключения ошибок путем расчета статической погрешности. Главное в этом процессе – подобрать правильный коэффициент, иначе ошибка (рассогласование) будет влиять и на интегральную составляющую.
Третий компонент ПИД – дифференцирующий. Он предназначен для компенсации влияния задержек, возникающих между воздействием на систему и обратной реакцией. Пропорциональный регулятор подает мощность до тех пор, пока температура не достигнет нужной отметки, но при прохождении информации к прибору, особенно при больших значениях, ошибки всегда возникают. Это может привести к перегреву. Дифференциал прогнозирует отклонения, вызванные задержками или воздействием внешней среды, и снижает подаваемую мощность заранее.
Настройка ПИД регулятора
Настройка ПИД-регулятора осуществляется 2 методами:
- Синтез подразумевает вычисление параметров на основании модели системы. Такая настройка получается точной, но требует глубоких познаний теории автоматического управления. Она подвластна только инженерам и ученым. Так как необходимо снимать расходные характеристики и производить кучу расчетов.
- Ручной способ основывается на методе проб и ошибок. Для этого за основу берутся данные уже готовой системы, вносятся некоторые коррективы в один или несколько коэффициентов регулятора. После включения и наблюдений за конечным результатом проводится изменение параметров в нужном направлении. И так до тех пор, пока не будет достигнут нужный уровень работоспособности.
Теоретический метод анализа и настройки на практике применяются крайне редко, что связано с незнанием характеристик объекта управления и кучей возможных возмущающих воздействий. Более распространены экспериментальные методы на основе наблюдения за системой.
Современные автоматизированные процессы реализуются как специализированные модули под управлением программ для настройки коэффициентов регулятора.
Назначение ПИД регулятора
ПИД регулятор предназначен для поддержания на требуемом уровне некой величины – температуры, давления, уровня в резервуаре, расхода в трубопроводе, концентрации чего-либо и т.д., изменением управляющего воздействия на исполнительные механизмы, такие как автоматические регулирующие клапана, используя для этого пропорциональную, интегрирующую, дифференцирующую величины для своей настройки.
Целью использования является получение точного управляющего сигнала, который способен контролировать большие производства и даже реакторы электростанций.
Пример схемы регулирования температуры
Часто ПИД регуляторы используются при регулировке температуры, давайте на простом примере подогрева воды в ёмкости рассмотрим данный автоматический процесс.
В емкости налита жидкость, которую нужно подогреть до нужной температуры и поддерживать её на заданном уровне. Внутри бака установлен датчик измерения температуры – термопара или термометр сопротивления и напрямую связан с ПИД-регулятором.
Для подогрева жидкости будем подавать пар, как показано ниже на рисунке, с клапаном автоматического регулирования. Сам клапан получает сигнал от регулятора. Оператор вводит значение температурной уставки в ПИД-регуляторе, которую необходимо поддерживать в ёмкости.
Если настройки коэффициентов регулятора неверны, будут происходить скачки температуры воды, при этом клапан будет то полностью открыт, то полностью закрыт. В этом случае необходимо рассчитать коэффициенты ПИД регулятора и ввести их заново. Если все сделано правильно, через небольшой промежуток времени система выровняет процесс и температура в ёмкости будет поддерживаться на заданной отметке, при этом степень открытия регулирующего клапана будет находиться в среднем положении.
Симуляция ПИД-регулятора температуры / Хабр
Поискал я статьи на данном ресурсе на тему ПИД-регуляторов. Много статей. И с объяснением принципов работы таких регуляторов. И с алгоритмами подбора параметров. И с реализацией на конкретных железках и программах. Не увидел одного — симуляции ПИД-регуляторов на моделях, с тем, чтобы пользователь без использования без всякого железа мог «пощупать» работу ПИД-регулятора.
Для этого создана матмодель нагревательного элемента с датчиком температуры и ПИД-регулятором (разумеется, с кучей упрощений, но без ущерба для реалистичности). Реализовано это на обычном Excel. С тем, чтобы любой пользователь мог сам «покрутить» виртуальные параметры, и посмотреть, что из этого выходит. Собственно, я эту модель в своё время и сделал как раз для того, чтобы «потрогать» своими руками процесс ПИД-регулирования.
Сама модель имеет следующие параметры:
- Кf инерционности нагреваемого тела (масса, уд. теплоёмкость, изоляция)
- Температура окружающей среды °С
- Начальная температура тела °С
ПИД-регулятор имеет параметры:
- Целевая температура °С
- Коэфф. пропорционального воздействия
- Коэфф. дифференциального воздействия
- Коэфф. интегрального воздействия
- Максимальное значение управляющего воздействия
- Общий коэффициент усиления (если 0, то регулятор и нагреватель не работают)
Дальше много картинок.
1. Сначала выключим ПИД-регулирование и убедимся, что модель адекватная.
Устанавливаем равную температуру тела и окружающей среды и убеждаемся на графике, что температура стабильна:
Теперь устанавливаем температуру тела выше температуры окружающей среды, график перестроился и видим, что температура тела по экспоненциальному закону стремится к температуре окружающей среды.
То же самое, но теперь температура тела ниже температуры окружающей среды.
Уменьшаем коэффициент инерционности, и видим, что температура тела быстрее стремится к окружающей среде.
Увеличиваем коэффициент инерционности, и видим, что температура тела медленнее стремится к окружающей среде.
Теперь включаем нагрев (но не ПИД-регулятор!). Для этого в колонке управления «включаем» 2 раза «нагрев» — с 0 по 2 единицу времени на «мощность» =20, и с 11 по 12 единицу времени на «мощность» =10. На графике наблюдаем адекватную реакцию.
Теперь «включаем» постоянный «нагрев» на «мощность» 10. Видим, что температура тела растёт, но до определенного предела — «мощности» не хватает.
2. Теперь «включим» ПИД-регулятор, и посмотрим, как он будет регулировать температуру.
Установим целевую температуру в 100°С и Kp=1,Kd=1,Ki=0.1
Увеличим Ki до 1, и увидим, что это не совсем полезно в данном случае.
Теперь уберем интегральную составляющую Ki и посмотрим — теперь регулировка не дотягивает до 100 градусов — мало «мощности» без интегральной составляющей.
Увеличим K и/или Kp — теперь «мощности» хватило, но без интегральной составляющей возникли высокочастотные колебания.
Ну и так далее.
Ссылка на файл. Кому интересно — поиграйтесь.
Как работает ПИД-регулятор?
Как следует из названия, эта статья даст точное представление о структуре и работе ПИД-регулятора. Однако, вдаваясь в подробности, давайте познакомимся с ПИД-регуляторами.
ПИД-регуляторы находят широкое применение в управлении производственными процессами. Примерно 95% операций с обратной связью в секторе промышленной автоматизации используют контроллеры PID. PID означает пропорционально-интегрально-производная. Эти три контроллера объединены таким образом, что вырабатывается управляющий сигнал.
 Работа ПИД-регулятора
Работа ПИД-регулятора
В качестве контроллера обратной связи он обеспечивает управляющий выход на желаемых уровнях. До изобретения микропроцессоров ПИД-регулирование осуществлялось с помощью аналоговых электронных компонентов. Но сегодня все ПИД-регуляторы обрабатываются микропроцессорами. Программируемые логические контроллеры также имеют встроенные инструкции ПИД-регулятора. Из-за гибкости и надежности ПИД-регуляторов они традиционно используются в приложениях управления технологическими процессами.
Работа ПИД-регулятора
При использовании недорогого простого двухпозиционного регулятора возможны только два состояния управления, например, полностью включено или полностью выключено. Он используется для приложений ограниченного управления, где этих двух состояний управления достаточно для достижения цели управления. Однако колебательный характер этого управления ограничивает его использование, и поэтому он заменяется ПИД-регуляторами.
ПИД-регулятор поддерживает выходной сигнал таким образом, чтобы между переменной процесса и заданным значением / желаемым выходом при операциях с замкнутым контуром была нулевая ошибка.PID использует три основных режима управления, которые описаны ниже.
П-регулятор:
 П-регулятор
П-регулятор
Пропорциональный или П-регулятор выдает выходной сигнал, пропорциональный текущей ошибке e (t). Он сравнивает желаемое или заданное значение с фактическим значением или значением процесса обратной связи. Результирующая ошибка умножается на пропорциональную константу, чтобы получить результат. Если значение ошибки равно нулю, то этот выход контроллера равен нулю.
 Реакция P-контроллера
Реакция P-контроллера
Для этого контроллера требуется смещение или ручной сброс при использовании отдельно.Это потому, что он никогда не достигает состояния устойчивого состояния. Он обеспечивает стабильную работу, но всегда поддерживает ошибку устойчивого состояния. Скорость реакции увеличивается при увеличении пропорциональной постоянной Kc.
I-Controller
 PI-контроллер
PI-контроллер
Из-за ограничения p-контроллера, где всегда существует смещение между переменной процесса и уставкой, необходим I-контроллер, который обеспечивает необходимые действия для устранения ошибки установившегося состояния .Он интегрирует ошибку за период времени, пока значение ошибки не достигнет нуля. Он содержит значение для конечного устройства управления, при котором ошибка становится равной нулю.
Интегральное управление уменьшает свой выход при отрицательной ошибке. Это ограничивает скорость ответа и влияет на стабильность системы. Скорость отклика увеличивается за счет уменьшения интегрального усиления Ki.
 Реакция ПИ-регулятора
Реакция ПИ-регулятора
На рисунке выше, когда коэффициент усиления I-регулятора уменьшается, ошибка установившегося состояния также продолжает уменьшаться.В большинстве случаев используется ПИ-регулятор, особенно там, где не требуется высокая скорость реакции.
При использовании ПИ-регулятора выход I-регулятора ограничен некоторым диапазоном, чтобы преодолеть условия интегральной намотки, когда интегральный выход продолжает увеличиваться даже в состоянии нулевой ошибки из-за нелинейностей в установке.
D-контроллер
 ПИД-контроллер
ПИД-контроллер
I-контроллер не имеет возможности предсказывать будущее поведение ошибки.Таким образом, он нормально реагирует на изменение уставки. D-контроллер преодолевает эту проблему, предвидя будущее поведение ошибки. Его выход зависит от скорости изменения ошибки во времени, умноженной на производную константу. Это дает толчок для выхода, тем самым увеличивая отклик системы.
Реакция ПИД-регулятора
На приведенном выше рисунке реакция D-регулятора больше по сравнению с ПИ-регулятором, а также время установления выхода уменьшено. Это улучшает стабильность системы за счет компенсации фазовой задержки, вызванной I-контроллером.Увеличение производного усиления увеличивает скорость отклика.
Итак, наконец, мы заметили, что, комбинируя эти три контроллера, мы можем получить желаемый отклик для системы. Разные производители разрабатывают разные алгоритмы ПИД-регулирования.
Методы настройки ПИД-регулятора
Перед началом работы ПИД-регулятора его необходимо настроить в соответствии с динамикой контролируемого процесса. Разработчики дают значения по умолчанию для терминов P, I и D, и эти значения не могут дать желаемой производительности и иногда приводят к нестабильности и снижению производительности управления.Для настройки ПИД-регуляторов разработаны различные типы методов настройки, которые требуют от оператора большого внимания для выбора наилучших значений пропорционального, интегрального и производного усиления. Некоторые из них приведены ниже.
Метод проб и ошибок: Это простой метод настройки ПИД-регулятора. Пока система или контроллер работают, мы можем настроить контроллер. В этом методе сначала мы должны установить значения Ki и Kd равными нулю и увеличивать пропорциональный член (Kp), пока система не достигнет колебательного поведения.Как только он начнет колебаться, отрегулируйте Ki (интегральный член), чтобы колебания прекратились, и, наконец, отрегулируйте D, чтобы получить быстрый отклик.
Метод кривой реакции процесса: Это метод настройки без обратной связи. Он вызывает реакцию, когда к системе применяется пошаговый вход. Первоначально мы должны применить некоторый управляющий выход к системе вручную и записать кривую отклика.
После этого нам нужно рассчитать наклон, мертвое время, время нарастания кривой и, наконец, подставить эти значения в уравнения P, I и D, чтобы получить значения усиления членов ПИД.
Кривая реакции процесса
Метод Цейглера-Николса: Цейглер-Николс предложил методы с обратной связью для настройки ПИД-регулятора. Это метод непрерывного цикла и метод затухающих колебаний. Процедуры для обоих методов одинаковы, но поведение колебаний отличается. В этом случае сначала мы должны установить константу p-регулятора Kp на конкретное значение, в то время как значения Ki и Kd равны нулю. Пропорциональное усиление увеличивается до тех пор, пока система не будет колебаться с постоянной амплитудой.
Коэффициент усиления, при котором система производит постоянные колебания, называется предельным усилением (Ku), а период колебаний — предельным периодом (Pc).Как только он будет достигнут, мы можем ввести значения P, I и D в ПИД-регулятор по таблице Зиглера-Николса в зависимости от используемого регулятора, например, P, PI или PID, как показано ниже.
Таблица Цейглера-Николса
Структура ПИД-регулятора
ПИД-регулятор
состоит из трех частей, а именно пропорционального, интегрального и производного управления. Совместная работа этих трех контроллеров дает стратегию управления процессом. ПИД-регулятор управляет переменными процесса, такими как давление, скорость, температура, расход и т. Д.Некоторые приложения используют ПИД-регуляторы в каскадных сетях, где два или более ПИД-регулятора используются для управления.
Структура ПИД-регулятора
На рисунке выше показана структура ПИД-регулятора. Он состоит из блока PID, который выдает свой вывод блоку обработки. Процесс / завод состоит из устройств конечного управления, таких как приводы, регулирующие клапаны и другие устройства управления, для управления различными процессами на производстве / заводе.
Сигнал обратной связи от технологической установки сравнивается с заданным значением или опорным сигналом u (t), и соответствующий сигнал ошибки e (t) подается в алгоритм ПИД.В соответствии с вычислениями пропорционального, интегрального и производного управления в алгоритме, контроллер выдает комбинированный ответ или управляемый выходной сигнал, который применяется к устройствам управления установкой.
Всем приложениям управления не требуются все три элемента управления. Комбинации, такие как элементы управления PI и PD, очень часто используются на практике.
Применение ПИД-регулятора: управление с обратной связью для бесщеточного двигателя постоянного тока
Мы надеемся, что смогли предоставить базовые, но точные знания о ПИД-регуляторах.Вот простой вопрос для всех вас. Среди различных методов настройки, какой метод предпочтительно использовать для достижения оптимальной работы ПИД-регулятора и почему?
Просим вас дать свои ответы в разделе комментариев ниже.
Фото предоставлено:
Блок-схема
ПИД-регулятора от wikimedia
Структура ПИД-регулятора, П-регулятор, П — ответ контроллера и ПИД-регулятор от blog.opticontrols
P — ответ контроллера от controls.engin.umich
Ответ PI-контроллера от м.eet
PID Controller response by wikimedia
Zeigler-Nichols table by controls.engin
.Описание ПИД-регуляторов
| Контрольные заметки
ПИД-регуляторы
названы в честь имеющихся у них режимов пропорционального, интегрального и производного регулирования. Они используются в большинстве приложений автоматического управления технологическими процессами в промышленности. ПИД-регуляторы могут использоваться для регулирования расхода, температуры, давления, уровня и многих других переменных промышленных процессов. В этом блоге рассматривается конструкция ПИД-регуляторов и объясняются используемые в них режимы управления P, I и D.
Без автоматических контроллеров все задачи регулирования придется выполнять вручную. Например: Чтобы поддерживать постоянную температуру воды, выпускаемой из промышленного газового обогревателя, оператор должен будет следить за датчиком температуры и соответствующим образом регулировать клапан топливного газа (Рисунок 1). Если по какой-то причине температура воды становится слишком высокой, оператор должен немного закрыть газовый клапан — ровно настолько, чтобы вернуть температуру к желаемому значению. Если вода становится слишком холодной, ему приходится открывать газовый кран.

Рисунок 1. Оператор выполняет ручное управление.
Управление обратной связью
Задача управления, выполняемая оператором, называется управлением с обратной связью, потому что оператор изменяет скорость стрельбы на основе обратной связи, которую он получает от процесса через датчик температуры. Управление обратной связью может выполняться вручную, как описано здесь, но обычно это делается автоматически, как будет объяснено в следующем разделе.
Контур управления
Оператор, клапан, датчик процесса и температуры образуют контур управления.Любое изменение, которое оператор вносит в газовый клапан, влияет на температуру, которая возвращается оператору, тем самым замыкая контур.
Чтобы избавить нашего оператора от утомительной задачи ручного управления, мы должны автоматизировать контур управления. Делается это следующим образом:
- Установить электронный прибор для измерения температуры.
- Автоматизируйте газовый клапан, добавив к нему привод (и, возможно, позиционер), чтобы им можно было управлять электронным способом.
- Установите контроллер (в данном случае ПИД-регулятор) и подключите его к электронному датчику температуры и автоматическому регулирующему клапану.
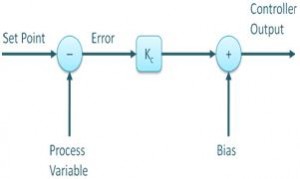
ПИД-регулятор имеет уставку (SP), которую оператор может установить на желаемую температуру. Выход контроллера (CO) устанавливает положение регулирующего клапана. А измерение температуры, называемое технологической переменной (PV), дает контроллеру столь необходимую обратную связь. Параметр процесса и выход контроллера обычно передаются с помощью сигналов 4-20 мА или с помощью цифровых команд по полевой шине.
Когда все запущено и работает, ПИД-регулятор сравнивает переменную процесса с ее уставкой и вычисляет разницу между двумя сигналами, также называемую ошибкой (E).
Затем, на основе ошибки и постоянных настройки ПИД-регулятора, контроллер вычисляет соответствующий выходной сигнал регулятора, который открывает регулирующий клапан в правильное положение для поддержания температуры на заданном уровне. Если температура должна подняться выше заданного значения, контроллер уменьшит положение клапана и наоборот.

Рис. 2. ПИД-регулятор, выполняющий автоматическое управление.
ПИД-регулирование
ПИД-регуляторы
имеют три режима управления:
- Пропорциональное управление
- Интегральное управление
- Производный контроль
Каждый из трех режимов по-разному реагирует на ошибку.Степень отклика, производимого каждым режимом управления, регулируется путем изменения настроек контроллера.
Режим пропорционального управления в большинстве случаев является основной движущей силой в контроллере. Он изменяет выходной сигнал контроллера пропорционально ошибке (рисунок 3). Если ошибка становится больше, действие управления увеличивается. В этом есть большой смысл, поскольку для исправления больших ошибок требуется больше управляющих воздействий.
Регулируемая настройка для пропорционального управления называется усилением контроллера (K c ).Более высокое усиление регулятора увеличит степень пропорционального управляющего воздействия для данной ошибки. Если коэффициент усиления регулятора установлен слишком высоким, контур управления начнет колебаться и станет нестабильным. Если коэффициент усиления контроллера установлен слишком низким, он не будет адекватно реагировать на возмущения или изменения уставки.


Рисунок 3. Пропорциональное регулирующее воздействие.
Регулировка настройки усиления регулятора фактически влияет также на интегральный и производный режимы управления.Вот почему этот параметр называется , коэффициент усиления контроллера , а не , пропорциональный коэффициент усиления .
Пропорциональный диапазон
В то время как большинство контроллеров используют коэффициент усиления контроллера (K c ) в качестве настройки пропорциональности, некоторые контроллеры используют полосу пропорциональности (PB), которая выражается в процентах. В таблице 1 показана взаимосвязь между K c и PB.
Коэффициент усиления контроллера (K c ) | Диапазон пропорциональности (PB)% |
| 0.1 | 1000 |
| 0,2 | 500 |
| 0,5 | 200 |
| 1 | 100 |
| 2 | 50 |
| 5 | 20 |
| 10 | 10 |
Таблица 1. Связь между K c и PB
Пропорциональные контроллеры
просты в понимании и легко настраиваются. Выход контроллера — это просто выход режима пропорционального управления плюс смещение.Смещение необходимо для того, чтобы контроллер мог поддерживать выходной сигнал (скажем, на уровне 50%) при отсутствии ошибки (уставка = переменная процесса).


Рисунок 4. Алгоритм пропорционального регулятора.
Использование одного только пропорционального управления имеет большой недостаток — смещение. Смещение — это постоянная ошибка, которую нельзя устранить одним только пропорциональным управлением. Например, давайте рассмотрим регулирование уровня воды в резервуаре на Рисунке 5 с помощью только пропорционального регулятора.Пока поток из резервуара остается постоянным, уровень будет оставаться на своем заданном значении.

Рис. 5. Контроль уровня, при котором оператор вызывает помехи.
Но если оператор должен увеличить поток из резервуара, уровень в резервуаре начнет снижаться из-за дисбаланса между притоком и выпуском. По мере того как уровень в резервуаре уменьшается, ошибка увеличивается, и наш пропорциональный контроллер увеличивает выходной сигнал контроллера пропорционально этой ошибке.Следовательно, клапан, регулирующий поток в резервуар, открывается шире, и в резервуар поступает больше воды.
По мере того, как уровень продолжает снижаться, клапан продолжает открываться, пока не достигнет точки, в которой приток снова совпадает с оттоком. В этот момент уровень в баке (и ошибка) останутся постоянными. Поскольку ошибка остается постоянной, наш П-контроллер будет поддерживать постоянный выход, а регулирующий клапан будет сохранять свое положение. Теперь система остается в равновесии, но уровень в баке остается ниже заданного значения.Эта остаточная устойчивая ошибка называется смещением.
На рисунке 6 показан эффект внезапного снижения давления топливного газа в технологическом нагревателе, описанном ранее, и реакция регулятора только p-типа. Снижение давления топливного газа снижает интенсивность воспламенения и понижается температура на выходе из нагревателя. Это создает и ошибку, на которую реагирует контроллер. Однако обнаруживается новая точка баланса между управляющим действием и ошибкой, и температурный сдвиг не устраняется пропорциональным контроллером.

Рис. 6. Реакция пропорционального регулятора на возмущение.
При пропорциональном управлении смещение сохраняется до тех пор, пока оператор вручную не изменит смещение на выходе контроллера, чтобы удалить смещение. Обычно это делается путем перевода контроллера в ручной режим, изменения его выхода вручную до тех пор, пока ошибка не станет равной нулю, а затем возврата в режим автоматического управления. Говорят, что оператор вручную «сбрасывает» контроллер.
Необходимость ручного сброса, как описано выше, привела к развитию автоматического сброса или режима интегрального управления, как мы его знаем сегодня. Пока присутствует ошибка (переменная процесса не находится в заданном значении), режим интегрального управления будет непрерывно увеличивать или уменьшать выходной сигнал контроллера для уменьшения ошибки. При наличии достаточного времени интегральное действие приведет к тому, что выходной сигнал контроллера будет достаточно большим, чтобы уменьшить ошибку до нуля.
Если ошибка большая, интегральный режим будет быстро увеличивать / уменьшать выходной сигнал контроллера, если ошибка мала, изменения будут медленнее.Для данной ошибки скорость интегрального действия задается настройкой времени интегрирования контроллера (T I ). Большое значение T I (большое время интегрирования) приводит к медленному интегральному действию, а небольшое значение T I (короткое время интегрирования) приводит к быстрому интегральному действию (рисунок 7). Если время интегрирования установлено слишком большим, контроллер будет работать медленно, если он установлен слишком коротким, контур управления будет колебаться и станет нестабильным. На рисунке T S — это интервал выполнения алгоритма управления, иногда называемый временем выборки или временем сканирования.
.
Что такое ПИД-регулятор? Изучите методы работы, структуры и настройки ПИД-регулятора
Перед тем, как объяснять ПИД-регулятор , давайте рассмотрим систему управления. Есть два типа систем; система разомкнутого цикла и система замкнутого цикла. Система разомкнутого контура также известна как неуправляемая система и система замкнутого контура известна как управляемая система . В системе с разомкнутым контуром выход не контролируется, потому что у этой системы нет обратной связи, а в системе с замкнутым контуром выход управляется с помощью контроллера, и для этой системы требуется один или несколько путей обратной связи.Система разомкнутого контура очень проста, но бесполезна в приложениях промышленного управления, потому что эта система неуправляема. Система с замкнутым контуром сложна, но наиболее полезна для промышленного применения, поскольку в этой системе выходной сигнал может быть стабильным на желаемом значении, PID является примером системы с замкнутым контуром . Блок-схема этой системы показана на рисунке 1 ниже.

Система замкнутого контура также известна как система управления с обратной связью , и этот тип системы используется для разработки автоматически стабильной системы с желаемым выходом или заданием.По этой причине он генерирует сигнал ошибки. Сигнал ошибки e (t) — это разница между выходным сигналом y (t) и опорным сигналом u (t) . Когда эта ошибка равна нулю, это означает, что достигнут желаемый выход, и в этом состоянии выходной сигнал такой же, как опорный сигнал.
Например, , сушилка работает несколько раз, что является предварительно установленным значением. Когда сушилка включена, запускается таймер, и он будет работать до тех пор, пока таймер не закончится и не выдаст выходной сигнал (сухая ткань).Это простая система с разомкнутым контуром, в которой выход не требуется для управления и не требует какой-либо обратной связи. Если в этой системе мы использовали датчик влажности, который обеспечивает обратную связь, сравнивает его с уставкой и генерирует ошибку. Сушилка работает до тех пор, пока эта ошибка не станет нулевой. Это означает, что когда влажность ткани равна заданному значению, сушилка перестанет работать. В системе с открытым контуром сушилка будет работать в течение фиксированного времени независимо от того, сухая или влажная одежда. Но в системе с замкнутым контуром сушилка не будет работать в течение фиксированного времени, она будет работать, пока одежда не высохнет.Это преимущество замкнутой системы и использования контроллера.
ПИД-регулятор и его работа:
Так что же такое ПИД-регулятор? ПИД-регулятор является общепринятым и наиболее часто используемым регулятором в промышленных приложениях, поскольку ПИД-регулятор прост, обеспечивает хорошую стабильность и быстрый отклик. PID означает пропорциональный, интегральный, производный . В каждом приложении коэффициент этих трех действий варьируется для получения оптимального отклика и контроля.Вход контроллера — это сигнал ошибки, а выходной сигнал передается в установку / процесс. Выходной сигнал контроллера формируется таким образом, чтобы выходной сигнал установки пытался достичь желаемого значения.
ПИД-регулятор — это система с замкнутым контуром , которая имеет систему управления с обратной связью и сравнивает переменную процесса (переменную обратной связи) с заданным значением и генерирует сигнал ошибки и в соответствии с этим регулирует выходной сигнал системы. Этот процесс продолжается до тех пор, пока ошибка не достигнет нуля или значение переменной процесса не станет равным заданному значению.

* Мы узнаем о пропорциональных, интегральных и производных действиях позже в этой статье.
ПИД-регулятор дает лучшие результаты, чем двухпозиционный регулятор . В контроллере ВКЛ / ВЫКЛ доступны только два состояния для управления системой. Он может быть включен или выключен. Он будет включаться, когда значение процесса меньше заданного значения, и выключится, если значение процесса больше заданного значения. В этом контроллере выходной сигнал никогда не будет стабильным, он всегда будет колебаться около заданного значения.Но ПИД-регулятор более стабилен и точен по сравнению с регулятором ВКЛ / ВЫКЛ.
ПИД-регулятор представляет собой комбинацию трех терминов; Пропорциональные, интегральные и производные . Давайте разберемся в этих трех терминах по отдельности.
Режимы управления ПИД:
Пропорциональный (P) отклик:
Член «P» пропорционален фактическому значению ошибки. Если ошибка велика, выходной сигнал управления также большой, а если ошибка мала, выходной сигнал управления также мал, но коэффициент усиления (K p ) равен
Также с учетом.Скорость отклика также прямо пропорциональна коэффициенту пропорционального усиления (K p ) . Таким образом, скорость отклика увеличивается за счет увеличения значения K p , но если K p увеличивается за пределы нормального диапазона, переменная процесса начинает колебаться с высокой скоростью и делает систему нестабильной.
у (т) ∝ е (т) y (t) = k i * e (t)
Где K p — коэффициент пропорционального усиления.

Здесь результирующая ошибка умножается на коэффициент усиления пропорциональности (константа пропорциональности), как показано в уравнении выше.Если в это время используется только P-регулятор, он требует ручного сброса, поскольку он поддерживает ошибку устойчивого состояния (смещение).
Интегральный (I) ответ:
Встроенный контроллер обычно используется для уменьшения ошибки установившегося состояния. Член «I» интегрируется (по времени) с фактическим значением ошибки . Из-за интеграции очень маленькое значение ошибки, приводит к очень высокому интегральному отклику. Действие встроенного контроллера продолжает изменяться, пока ошибка не станет равной нулю.
у (т) ∝ ∫ е (т) y (t) = k i ∫ e (t)
Где K i — коэффициент пропорционального усиления.

Интегральное усиление обратно пропорционально скорости отклика, увеличивая k и , уменьшая скорость отклика. Пропорциональные и интегральные регуляторы используются вместе (ПИ-регулятор) для обеспечения хорошей скорости отклика и устойчивого состояния.
Ответ на производную (D):
Производный контроллер используется с комбинацией PD или PID.Он никогда не используется отдельно, потому что, если ошибка постоянна (не равна нулю), выходной сигнал контроллера будет нулевым. В этой ситуации контроллер ведёт себя с нулевой ошибкой жизни, но на самом деле есть некоторая ошибка (постоянная). Выходной сигнал регулятора производной прямо пропорционален скорости изменения ошибки во времени, как показано в уравнении. Убрав знак пропорциональности, мы получим производную константу усиления (k d ). Как правило, производный контроллер используется, когда переменные процессора начинают колебаться или изменяются с очень высокой скоростью.D-контроллер также используется для прогнозирования будущего поведения ошибки по кривой ошибок. Математическое уравнение показано ниже;
y (t) ∝ de (t) / dt y (t) = K d * de (t) / dt
Где K d — коэффициент пропорционального усиления.

Пропорционально-интегральный регулятор:
Это комбинация контроллера P и I. Выход контроллера представляет собой сумму обоих (пропорциональных и интегральных) откликов.Математическое уравнение показано ниже;
y (t) ∝ (e (t) + ∫ e (t) dt) y (t) = k p * e (t) + k i ∫ e (t) dt
Пропорциональный и производный регулятор: Это комбинация P- и D-регулятора. Выход контроллера представляет собой сумму пропорциональных и производных характеристик. Математическое уравнение контроллера PD показано ниже;
y (t) ∝ (e (t) + de (t) / dt) y (t) = k p * e (t) + k d * de (t) / dt
Пропорциональный, интегральный и производный контроллер: Это комбинация P, I и D.Выход контроллера представляет собой сумму пропорциональных, интегральных и производных характеристик. Математическое уравнение контроллера PD показано ниже;
y (t) ∝ (e (t) + ∫ e (t) dt + de (t) / dt) y (t) = k p * e (t) + k i ∫ e (t) dt + k d * de (t) / dt
Таким образом, комбинируя этот пропорциональный, интегральный и производный отклик управления, формирует ПИД-регулятор .
Методы настройки ПИД-регулятора:
Для получения желаемого выхода этот контроллер должен быть правильно настроен.Процесс получения идеального ответа от ПИД-регулятора с помощью настройки ПИД-регулятора называется настройкой контроллера . Средство настройки ПИД-регулятора устанавливает оптимальное значение усиления пропорционального (k p ), производного (k d ) и интегрального (k i ) отклика. ПИД-регулятор настроен на подавление помех. означает пребывание в заданном заданном значении и отслеживание команд, означает, что при изменении заданного значения выходной сигнал контроллера будет следовать за новым заданным значением. Если контроллер настроен правильно, выходной сигнал контроллера будет соответствовать изменяемой уставке, с меньшими колебаниями и меньшим демпфированием.

Существует нескольких методов настройки ПИД-регулятора и получения желаемого отклика. Способы настройки контроллера приведены ниже;
- Метод проб и ошибок
- Метод кривой реакции процесса
- Метод Циглера-Николса
- Релейный метод
- Использование программного обеспечения
1. Метод проб и ошибок:
Метод проб и ошибок также известен как метод ручной настройки, и это самый простой метод.В этом методе сначала увеличивайте значение kp до тех пор, пока система не достигнет колебательного отклика, но система не должна становиться нестабильной и сохранять значения kd и ki равными нулю. После этого установите значение ki таким образом, чтобы колебания системы прекратились. После этого установите значение kd для быстрого отклика.
2. Метод кривой реакции процесса:
Этот метод также известен как метод настройки Коэна-Куна. В этом методе сначала создайте кривую реакции процесса в ответ на возмущение.По этой кривой мы можем вычислить значение усиления контроллера, время интегрирования и время производной. Эта кривая определяется при ручном пошаговом тестировании процесса без обратной связи. Параметр модели можно найти по начальному шагу возмущения в процентах. По этой кривой мы должны найти крутизну, мертвое время и время нарастания кривой, которые являются не чем иным, как значением kp, ki и kd.
3. Метод Цейглера-Николса:
В этом методе также сначала установите значения ki и kd в ноль.Пропорциональное усиление (kp) увеличивается до тех пор, пока не достигнет максимального усиления (ku). предельное усиление — это не что иное, как усиление, при котором выходной сигнал контура начинает колебаться. Это ku и период колебаний Tu используются для получения коэффициента усиления ПИД-регулятора из приведенной ниже таблицы.
Тип контроллера | кп | к i | кд |
-P | 0.5 к u | ||
PI | 0,45 к u | 0,54 к u / T u | |
PID | 0,60 к u | 1,2 к u / T u | 3 к u T u /40 |
4.Метод реле:
Этот метод также известен как метод Астрома-Хагглунда. Здесь выход переключается между двумя значениями регулирующей переменной, но эти значения выбираются таким образом, что процесс должен пересекать заданное значение. Когда переменная процесса меньше уставки, управляющий выход устанавливается на большее значение. Когда значение процесса больше заданного значения, управляющий выход устанавливается на более низкое значение и формируется выходной сигнал. Период и амплитуда этой колебательной формы волны измеряются и используются для определения максимального усиления ku и периода Tu, которые используются в вышеупомянутом методе.
5. Использование программного обеспечения:
Для настройки ПИД-регулятора и оптимизации контура доступны пакеты программного обеспечения. Эти программные пакеты собирают данные и создают математическую модель системы. По этой модели программное обеспечение находит оптимальный параметр настройки на основе эталонных изменений.
Структура ПИД-регулятора:
ПИД-регуляторы
разработаны на основе микропроцессорной технологии. Разные производители используют разную структуру и уравнение ПИД.Наиболее часто используемые уравнения PID: уравнение параллельного, идеального и последовательного ПИД-регулирования .
В уравнении параллельного ПИД-регулятора пропорциональное, интегральное и производное воздействия работают отдельно друг от друга и объединяют эффекты этих трех воздействий в системе. Блок-схема этого типа PID показана ниже;

В уравнении идеального ПИД-регулятора константа усиления k p распределяется по всему члену. Таким образом, изменение k p влияет на все остальные члены уравнения.

В уравнении ПИД-регулятора серии константа усиления k p распределяется по всем элементам так же, как и уравнение идеального ПИД-регулятора, но в этом уравнении интеграл и константа производной влияют на пропорциональное действие.

Приложения ПИД-регулятора:
Контроль температуры:
Возьмем для примера кондиционер (кондиционер) любого завода / процесса. Уставка — это температура (20 ͦ C), а текущая температура, измеренная датчиком, составляет 28 ͦ C.Наша цель — запустить кондиционер при желаемой температуре (20 ͦ C). Теперь контроллер переменного тока генерирует сигнал в соответствии с ошибкой (8 ° C), и этот сигнал подается на переменный ток. В соответствии с этим сигналом выходной сигнал переменного тока изменяется и температура снижается до 25 ° C. Далее такой же процесс будет повторяться до тех пор, пока датчик температуры не покажет желаемую температуру. Когда ошибка равна нулю, контроллер подаст команду остановки на переменный ток, и снова температура повысится до определенного значения, и снова возникнет ошибка, и тот же процесс будет повторяться непрерывно.
Проектирование контроллера заряда MPPT (отслеживание максимальной мощности) для солнечных фотоэлектрических систем:
ВАХ фотоэлемента зависит от температуры и уровня освещенности. Таким образом, рабочее напряжение и ток будут непрерывно изменяться в зависимости от изменения атмосферных условий. Поэтому очень важно отслеживать точку максимальной мощности для эффективной фотоэлектрической системы. Чтобы найти MPPT, используется ПИД-регулятор, и для этого заданное значение тока и напряжения передается контроллеру.Если атмосферные условия изменятся, этот трекер поддерживает постоянное напряжение и ток.
Преобразователь силовой электроники:
ПИД-регулятор наиболее полезен в приложениях силовой электроники, таких как преобразователи. Если преобразователь подключен к системе, в соответствии с изменением нагрузки выход преобразователя должен измениться. Например, инвертор подключен к нагрузке, при увеличении нагрузки от инвертора будет течь больше тока. Таким образом, параметры напряжения и тока не являются фиксированными, они будут меняться в соответствии с требованиями.В этом состоянии ПИД-регулятор используется для генерации импульсов ШИМ для переключения IGBT инвертора. При изменении нагрузки на контроллер подается сигнал обратной связи, который генерирует ошибку. Импульсы ШИМ генерируются в соответствии с сигналом ошибки. Таким образом, в этом состоянии мы можем получить переменный вход и переменный выход с одним и тем же инвертором.
.
21. ПИД-регулятор СИСТЕМЫ ПРИВОД. Рисунок 1: Примерный пример правила
25. Радиоприемник AM

1 25. AM-радиоприемник В этой главе описывается программирование микроконтроллера для демодуляции сигнала местной радиостанции.Для упрощения схемы сигнал от местной амплитудно-модулированной
Дополнительная информация
AN3252 Указание по применению

Замечания по применению Создание генератора волн с использованием STM8L-DISCOVERY Обзор приложения В этих замечаниях по применению дается краткое описание того, как использовать STM8L-DISCOVERY в качестве основного генератора волн для
Дополнительная информация
Лаборатория 2.0 Интерфейс тепловизора

Лабораторная работа 2.0. Интерфейс тепловизионной камеры. Лабораторная работа 1 — Направленная подставка для камеры (повторение) Целью лабораторной работы 1 было использование джойстика PS2 для управления движением модуля панорамирования и наклона. С этой целью вы реализовали
Дополнительная информация
Беспроводная камера безопасности

Техническое руководство для беспроводной камеры видеонаблюдения 14.12.2001 Содержание Стр. 1.Обзор 3 2. Сторона камеры 4 1. Камера 5 2. Датчик движения 5 3. PIC 5 4. Передатчик 5 5. Питание 6 3. Сторона компьютера 7 1. Приемник
Дополнительная информация
Кросс-компилятор Keil C51

Кросс-компилятор Keil C51 Компилятор ANSI C Генерирует быстрый компактный код для 8051 и его производных Преимущества C перед ассемблером Нет необходимости знать набор команд микроконтроллера Размещение регистров
Дополнительная информация
AN3998 Примечание по применению

Примечание по применению Программное обеспечение декодирования звука PDM на микроконтроллерах STM32 1 Введение В этом документе представлены алгоритмы и архитектура оптимизированной программной реализации для сигнала PDM
Дополнительная информация
ПИД-КОНТРОЛЛЕР ТЕМПЕРАТУРЫ НА ОСНОВЕ ПК

КОНТРОЛЛЕР ТЕМПЕРАТУРЫ ПИД-ФИД НА ОСНОВЕ ПК R.Ниша * и К. Мадхусуданан, Кафедра приборостроения, Кочинский университет науки и технологий, Кочин, 22, Индия РЕЗЮМЕ: простой и универсальный программируемый компьютер на базе ПК
Дополнительная информация
Электронный блок датчика тока

Электронный блок датчика тока Обзор Что такое электронный блок? Электронный кирпич — это электронный модуль, который можно собрать, как кирпичи Лего, просто подключив и вытащив.По сравнению с
Дополнительная информация
Цифровая педаль гитарных эффектов

Цифровая гитарная педаль эффектов 01001000100000110000001000001100 010010001000 Джонатан Фонг Джон Шефчик Советник: доктор Брайан Наттер SPRP499 Техасский технический университет [email protected] План презентации
Дополнительная информация
DSPDemo. Мо Уитли MoeTronix.

DSPDemo Мо Уитли MoeTronix www.moetronix.com 10 сентября 2004 г. Содержание 1 Введение … 3 1.1 Идея … 3 1.2 Аппаратное обеспечение … 3 1.2.1 Блок-схема … 3 1.3 Программное обеспечение … 4 1.3.1 Базовые модули …
Дополнительная информация
8051 МИКРОКОНТРОЛЛЕРНЫЙ КУРС

КУРС МИКРОКОНТРОЛЛЕРА 8051 Цель: 1. Ознакомление с различными типами микроконтроллеров 2. Детальное знание микроконтроллера 8051 3. Программирование и взаимодействие с микроконтроллером 8051 Предварительные требования:
Дополнительная информация
Урок 10: Интерфейс видеовыхода

Урок 10: Интерфейс видеовыхода 1.Введение Программа Университета Альтера предоставляет ряд аппаратных контроллеров, называемых ядрами, для управления цифро-аналоговым преобразователем
видеографического массива (VGA).
Дополнительная информация
Программирование логических контроллеров

Программирование логических контроллеров Программируемый логический контроллер (ПЛК) — это система на основе микропроцессора, которая использует программируемую память для хранения инструкций и реализации таких функций, как логика, последовательность,
Дополнительная информация
Особенности, преимущества и работа

Особенности, преимущества и работа 2014 Decibel Eleven Содержание Введение… 2 Характеристики … 2 Задняя панель … 3 Подключения … 3 Питание … 3 MIDI … 3 Петли для педалей … 4 Примеры схем подключения … 5,6
Дополнительная информация
AN2658 Примечание по применению

Замечания по применению Использование аналого-цифрового преобразователя микроконтроллера STM8S Введение Целью данной заметки по применению является объяснение того, как использовать аналого-цифровой преобразователь, реализованный
Дополнительная информация
ИСПОЛЬЗОВАНИЕ РЕЖИМА ПРИОСТАНОВКИ НА USB-МЫШИ

ПРИМЕЧАНИЕ ПО ПРИЛОЖЕНИЮ ОБРАЩЕНИЕ С РЕЖИМОМ ПРИОСТАНОВКИ НА USB-МЫШИ, разработанное командой разработчиков микроконтроллеров ВВЕДЕНИЕ Все USB-устройства должны поддерживать режим ожидания.Режим ожидания позволяет устройствам перейти в режим пониженного энергопотребления
Дополнительная информация
Руководство по протоколу RS-485

Руководство по протоколу RS-485 Версия: 1.0 11 января 2000 г. Рекомендации и описание протокола RS-485 Стр. I Содержание 1.0 ОБЗОР ШИНЫ СВЯЗИ … 1 2.0 РЕКОМЕНДАЦИИ ПО ПРОЕКТИРОВАНИЮ … 1 2.1 Конструкция оборудования
Дополнительная информация
Цифровой стробоскопический осциллограф

Цифровой стробоскопический осциллограф Мэри Энн Петерс и Джозеф Тилка Факультет механической и аэрокосмической инженерии Принстонский университет, Принстон, штат Нью-Джерси 8, США ВВЕДЕНИЕ В этом документе приводится краткое описание конструкции
Дополнительная информация
ЦАП цифро-аналоговый преобразователь

Цифро-аналоговый преобразователь ЦАП Основные особенности ЦАП ЦАП XMC4000 предоставляет два цифро-аналоговых преобразователя.Каждый может выводить одно аналоговое значение. Могут быть сгенерированы дополнительные несколько аналоговых волн
Дополнительная информация
Праймер для управления процессом

Праймер для управления процессами В начале промышленной революции процессы контролировались вручную. Мужчины крутили клапаны, тянули рычаги или меняли переключатели, исходя из необходимости включать или выключать устройства. As
Дополнительная информация
.