
Электродвигатель постоянного тока
Постоянная момента
 ,
,
Постоянная ЭДС
Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока.
Наведенная ЭДС последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Суммарная ЭДС, равная сумме ЭДС в каждой катушке, прикладывается к внешним выводам двигателя. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения: [1]
 ,
,
- где
 — электродвижущая сила, В,
— электродвижущая сила, В, - – постоянная ЭДС, В∙с/рад,
- — угловая частота, рад/с
 — электродвижущая сила, В,
— электродвижущая сила, В,
 – постоянная ЭДС, В∙с/рад,
– постоянная ЭДС, В∙с/рад,
 — угловая частота, рад/с
— угловая частота, рад/с
Постоянные момента и ЭДС в точности равны между собой KT = KE. Постоянные KT и KE равны друг другу, если они определены в единой системе едениц.
Постоянная электродвигателя
Одним из основных параметров электродвигателя постоянного тока является постоянная электродвигателя Kм. Постоянная электродвигателя определяет способность электродвигателя преобразовывать электрическую энергию в механическую.
 ,
,
- где — постоянная электродвигателя, Нм/√Вт,
- R — сопротивление обмоток, Ом,
- – максимальный момент, Нм,
- — мощность потребляемая при максимальном моменте, Вт
 — постоянная электродвигателя, Нм/√Вт,
— постоянная электродвигателя, Нм/√Вт,
 – максимальный момент, Нм,
– максимальный момент, Нм,
 — мощность потребляемая при максимальном моменте, Вт
— мощность потребляемая при максимальном моменте, Вт
Справка: Постоянная электродвигателя вместе с размерами электродвигателя являются основными параметрами для инженера при выборе электродвигателя с лучшим соотношением мощность / объем.
Постоянная электродвигателя не зависит от соединения обмоток, при условии, что используется один и тот же материал проводника. Например, обмотка двигателя с 6 ветками и 2 параллельными проводами вместо 12 одиночных проводов удвоят постоянную ЭДС, при этом постоянная электродвигателя останется не изменой.
Жесткость механической характеристики двигателя
 ,
,
- где — жесткость механической характеристики электродвигателя постоянного тока
 — жесткость механической характеристики электродвигателя постоянного тока
— жесткость механической характеристики электродвигателя постоянного тока
Напряжение электродвигателя
Уравнение баланса напряжений на зажимах двигателя постоянного тока имеет вид (в случае коллекторного двигателя не учитывается падение напряжения в щеточно-коллекторном узле):
 ,
,
- где U — напряжение, В.
Уравнение напряжения выраженное через момент двигателя будет выглядеть следующим образом:

Соотношение между моментом и частотой вращения при двух различных напряжениях питания двигателя постоянного тока неизменно. При увеличении частоты вращения момент линейно уменьшается. Наклон этой функции KTKE/R постоянный и не зависит от значения напряжения питания и частоты вращения двигателя.
Благодаря таким характеристикам упрощается управление частотой вращения и углом поворота двигателей постоянного тока. Это характерно для коллекторных и вентильных двигателей постоянного тока, что нельзя сказать о двигателях переменного тока и шаговых двигателях [1].
Мощность электродвигателя постоянного тока
Упрощенная модель электродвигателя выглядит следующим образом:

- где I – сила тока, А
- U — напряжение, В,
- M — момент электродвигателя, Н∙м
- R — сопротивление токопроводящих элементов, Ом,
- L — индуктивность, Гн,
- Pэл — электрическая мощность (подведенная), Вт
- Pмех — механическая мощность (полезная), Вт
- Pтеп — тепловые потери, Вт
- Pинд — мощность затрачиваемая на заряд катушки индуктивности, Вт
- Pтр — потери на трение, Вт
Механическая постоянная времени
Механическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое частота вращения ненагруженного электродвигателя достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
- где — механическая постоянная времени, с
 — механическая постоянная времени, с
— механическая постоянная времени, с
Смотрите также
Электродвигатель постоянного тока
Категория: постоянный ток
Заводы производители электродвигателей постоянного тока: Псковский электромашиностроительный завод, Татэлектромаш, Кросна-Мотор, Карпинский электромашиностроительный завод, Динамо Энерго, Электросила (Силовые машины), Сибэлектропривод, Белгородский электротехнический завод, Островский завод электрических машин
Серии двигателей:
- для большегрузных самосвалов – ДПТВ, ЭК, ДК, ЭДП
- для железнодорожного транспорта – П, ЭК, ДК, ДТК, ЭДУ, 4ПНЖ, ЭДТ, ЭДК, ДПТ
- для экскаваторов – ДЭ, Д, ЭК, ДЭВ, ДЭ (В), ДПЭ, ДМПЭ, ДПВ, КРЭ
- для городского электротранспорта – ДПУР, КР
- для кранов – Д, МПЭ
- для судов – ДПМ, ТДП
- для буровых – Д808Б, КР, ДК, МПБ, 4П, ДПБ
- для шахт – ДПТ, ДАТВ и ДАКВ
- общепромышленное/общее применение – 4П, КР, Д808К

Применение
Двигатели постоянного тока (ДПТ) приводят во вращение механизмы, требующие больших пусковых вращающих, моментов и широкого регулирования частоты вращения. Данные электродвигатели широко применяются в городском и железнодорожном транспорте, в судостроении, при работе кранов и в других областях. При выборе электродвигателя неоходима консультация с заводом производителем.
Цена на двигатели постоянного тока зависит от типа двигателя и его комплектации:
- Бренда производителя
- Параметров мощности
- Линейных размеров двигателя
- Наличия защиты от пыли и влаги
- Способа монтажа
Преимущества двигателей постоянного тока:
- Простота конструкции и ремонтопригодность
- Надежность и безопасность оборудования может быть повышена за счет установки дополнительных датчиков, уплотнителей и др.
- Возможность и простота регулировки скорости вращения
- Компактные габариты, применение в ограниченном пространстве
- Широкое распространение и применение в различных отраслях
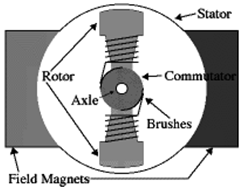
Устройство двигателя постоянного тока
Конструктивно ДПТ устроен по принципу взаимодействия магнитных полей. Коллектроный электродвигатель постоянного тока состоит из частей:
- Статора — неподвижная часть двигателя. Включают постоянные магниты повернутых разными полюсами к обмоткам.
- Ротора – вращающееся часть. Расположен на валу и включает обмотки с сердечниками.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу двигателя.
- Щёток — передают электроток через коллектор до обмоток возбуждения.
Рисунок 1 — Устройство коллекторного двигателя постоянного тока. 1- якорь, 2 — сердечник полюса, 3 — обмотка полюса, 4 — вентилятор, 5 — статор, 6 — щётки, 7 — коллектор
Технические характеристики двигателей ДПЭ, ДПВ постоянного тока для экскаваторов

Габариты для двигателей ДПВ постоянного тока для экскаваторов

Асинхронный электродвигатель постоянного тока 220В и 380В
Электродвигатель – машина, преобразовывающая энергию электромагнитного поля во вращательное движение (электрический двигатель). Это, пожалуй, наиболее гениальное изобретение, позволившее Человечеству сделать цивилизационный скачок в индустриальное общество. Коэффициент его полезного действия составляет 95-98 процентов. Ни один из механизмов на планете Земля таковым больше не обладает.
Основа принципа действия
В основе принципа действия любого электрического двигателя лежит феномен электромагнитной индукции. Если скрутить любой проводник в кольцо и через него протащить магнит, то в нем возникнет электрический ток, направление течения которого будет противоположно движению магнита. Верно и обратное: прохождение электричества через проводник вызывает индуцирование ЭДС в металлическом стержне.
Этот эффект был открыт в 1832 году английским физиком Майклом Фарадеем, создавшим прибор, состоящий из постоянного магнита и бронзового диска, помещенного между его полюсами. При вращении диска с подключенных к нему проводов снималось небольшое напряжение и переменный ток большой силы. Поэтому диск Фарадея называют еще и униполярным генератором, который при всей архаичности конструкции до сих пор используется. Например, в установках ТОКАМАК для разогрева плазмы и рельсотронах – разновидности оружия.
Электрический двигательпостоянного тока
Если к диску Фарадея подключить гальваническую батарею, то он совершит один оборот – до того момента, как совпадут разноименные полюса – ее и магнита. Электродвигатель постоянного тока в своей работе использует эффект отталкивания одноименных полюсов магнита. Чтобы вращение стало непрерывным, на его роторе закреплено особое устройство (коллектор) – кольцо из металла, поделенное на сектора диэлектриком.
Питающее напряжение подводится к коллектору посредством скользящих контактов – щеток. Когда вал машины поворачивается, сектора коллектора меняются местами и полюса остаются разноименными. Поэтому вращение продолжается. Скорость вращения ротора машин постоянного тока зависит от количества обмоток на нем. Каждая из них представляет собой своеобразный диск Фарадея и подключена к своей паре пластин коллектора.
Если ее мощность электрической машины невелика, то статорные магниты делают из природного металла с соответствующими свойствами. В промышленных машинах постоянного тока используются электромагниты – катушки из проводников. Они питаются тем же напряжением, что и катушки ротора.
Двигатели переменного тока
Конструкция электродвигателя переменного потом электроэнергии выглядит как бы вывернутой наизнанку по отношению к машинам постоянного тока. Питающее напряжение в нем подводится к статорным обмоткам, а принцип действия основан не на отталкивании одноименных полюсов магнита, а на притягивании имеющих противоположный знак.
Магнитное поле статора машины переменного тока вращается. Этот феномен возникает в результате сложения векторов магнитной индукции нескольких переменных токов, фазы синусоид которых сдвинуты друг относительно друга на некоторый угол – 900, если питание двухфазное, и 600 при трехфазном напряжении. Величины углов объясняются просто: отдельная обмотка генератора переменного тока состоит из двух катушек, а на статоре они расположены диаметрально противоположно. Если поделить 3600 на четыре (две обмотки) или на шесть (три обмотки), то получим исходные значения.
Магнитное поле ротора индуцируется энергией в статорных обмотках и имеет два свойства:
- Оно противоположно статорному по знаку.
- Отстает от статорного, поскольку на его индукцию требуется некоторое время, а сам ротор имеет физический вес и по этой причине обладает моментом инерции.
Полюса магнитного поля ротора стремятся притянуться к противоположным полюсам статорного, но эта своеобразная погоня никогда не может закончиться по двум причинам:
- линейная скорость ротора ниже из-за разницы в размерах.
- Существуют потери энергии в воздушном зазоре между деталями машины.
Угол рассогласования между ротором и статором достигает 180, из-за его наличия электродвигатели переменного электричества называют асинхронными.
Наиболее распространенной конструкцией является электрическая машина, обмотка ротора которой состоит из нескольких проводников, замкнутых двумя металлическими кольцами. По форме она похожа на так называемое беличье колесо. Таковы все общепромышленные электродвигатели. Они просты, но имеют неустранимый недостаток: большие пусковые токи, которые приводят к перегрузкам в сети и авариям.
Двигатели с фазным ротором запускаются плавно, без перегрузок, но они сложны и дороги. Применяются для обеспечения больших тяговых усилий. Например, в крановом оборудовании или на электротранспорте.
Видео — как работает Электродвигатель:
Как правильно эксплуатировать электродвигатель
Асинхронный электродвигатель на сегодня является наиболее широко используемым двигателем в промышленности и строительстве. Чтобы устройство было всегда в форме и не пришлось его отправлять на свалку в результате преждевременного износа, хорошие хозяева проявляют заботу о нём и эксплуатируют правильно. В этой статье мы обсудим, как правильно эксплуатировать электродвигатель во избежание возникновения неполадок при его работе.
Условия работы электрического двигателя
Электрический двигатель будет в полной мере соответствовать характеристикам, указанным в паспорте, если его, прежде всего, правильно установить и использовать. Условия обеспечения номинальных параметров двигателем следующие:
-
колебания напряжения питающей сети электрического тока, к которой подключен агрегат, не должны превышать 5% от номинала; -
максимально допустимая температура воздуха, окружающего конструкцию, должна быть не более +350 С; -
во избежание перегрузки мотора необходимо следить за показаниями амперметра, не допуская увеличения силы тока более 5% от номинала; -
корпус устройства надежно следует заземлить и регулярно проверять сопротивления заземления; -
конструктивные элементы, изготовленные из коррозируемых материалов, необходимо покрыть краской. Коррозия всегда начинается на поверхности металла, а затем распространяется вглубь, ухудшая механические свойства материала; -
кабельные сети, по которым поступает питающее напряжение, следует надёжно изолировать и защитить от случайных механических повреждений. Подключение выполнить напрямую к контактным зажимам двигателя, находящимся в коробке.
Элементарные правила эксплуатации в отношении своего двигателя
Правильная эксплуатация электродвигателя обеспечивает его надёжную работу в течение всего установленного ресурса. До включения устройства в работу обязательно проверить:
— чистоту и отсутствие ненужных предметов на корпусе и рядом;
— состояние заземления;
— качество крепления статора.
Первый запуск электродвигателя лучше доверить специалисту, который будет обслуживать все движущиеся механизмы.
Рекомендации по эксплуатации асинхронных электродвигателей:
-
У работающего двигателя основные электрические и механические показатели должны быть следующими:
— температура нагрева статора не более 900 С;
— вибрация в пределах нормы, а именно в соответствии с количеством оборотов двигателя;
— вращение ротора бесшумное, без скачков;
— установленная заводом-изготовителем величина нагрузки;
— отсутствие искрения щёток у коллекторных двигателей.
-
Защита электрических цепей осуществляется плавкими вставками. Значение тока по номиналу пишется на вставке. -
Аварийное отключение электродвигателя производится в следующих случаях:
— появился сильный запах горения, дым, искры, огонь;
— повышенный уровень вибрации, из-за которого возможно разрушение двигателя;
— выход из строя электропривода;
— резкое снижение оборотов и повышенный нагрев.
Владелец также обязан планировать профилактические ремонты, которые повышают надёжность оборудования.
Некоторые двигатели используются крайне редко. Как поступать в этом случае? Рекомендуется постоянно осматривать, проверять сопротивление изоляции и запускать устройства, что позволит при необходимости без промедления их использовать.
Вывод
Конструкция асинхронного электродвигателя простая и надёжная. И, если соблюдать правила эксплуатации, в том числе не превышать основные электрические и механические параметры, установленные изготовителем, то срок его службы можно будет увеличить.
Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
|
Завод производитель
|
Назначение двигателя
|
Серия двигателя
|
Примечание
|
|
Псковский электромашиностроительный завод
|
для железнодорожного транспорта
|
П
|
Электродвигатели постоянного тока серии П
|
|
Псковский электромашиностроительный завод
|
для городского электротранспорта
|
ДПУР
|
Электродвигатель постоянного тока ДПУР-1,5-У2
|
|
Псковский электромашиностроительный завод
|
для большегрузных самосвалов
|
ДПТВ
|
Электродвигатель постоянного тока ДПТВ-16,25-О2 для самосвалов БелАЗ
|
|
Татэлектромаш
|
для большегрузных самосвалов
|
ЭК, ДК
|
Электродвигатели тяговые постоянного тока предназначены для мотор — колес большегрузных автосамосвалов «БЕЛАЗ»
|
|
Татэлектромаш
|
для железнодорожного транспорта
|
ЭК-235
ЭК-260
|
Тяговый электродвигатель постоянного тока ЭК-235 предназначен для привода колесных пар электропоездов
|
|
Татэлектромаш
|
для железнодорожного транспорта
|
ДК-263 ВМ
|
Электродвигатель тяговый постоянного тока предназначен для привода колес путевых машин на железнодорожном ходу
|
|
Татэлектромаш
|
для железнодорожного транспорта
|
ДТК-800Ч
|
электродвигатель тяговый постоянного тока ДТК-800Ч
|
|
Татэлектромаш
|
для железнодорожного транспорта
|
ЭДУ-133
|
Электродвигатели тяговые постоянного тока предназначены для привода колесных пар магистральных и маневровых тепловозов
|
|
Татэлектромаш
|
для железнодорожного транспорта
|
ЭК-810Ч
|
Электродвигатели тяговые постоянного тока ЭК-810Ч, 810А предназначены для привода колесных пар грузовых электровозов постоянного тока
|
|
Татэлектромаш
|
для экскаваторов
|
Д-812
|
Электродвигатели постоянного тока Д-812 предназначены для работы в электроприводах подъемно-транспортных машин и металлургических агрегатов
|
|
Татэлектромаш
|
для экскаваторов
|
ДЭ-812
|
Электродвигатель тяговый постоянного тока ДЭ-812 предназначен для привода хода карьерного экскаватора ЭКГ-10
|
|
Татэлектромаш
|
для экскаваторов
|
ЭК-814ЭВ, ЭК-816Э, ЭК-818Э
|
Электродвигатель тягового постоянного тока ЭК-814ЭВ предназначен для привода поворота карьерного экскаватора ЭКГ-10
|
|
Татэлектромаш
|
для экскаваторов
|
ЭК
|
Электродвигатели постоянного тока предназначены для комплектации механизмов экскаватора
|
|
Татэлектромаш
|
для экскаваторов
|
ДЭВ-812
|
Электродвигатель постоянного тока ДЭВ-812 вертикального исполнения предназначен для привода механизмов поворота и напора экскаватора.
|
|
Кросна-Мотор
|
Для кранов
|
Д
|
Металлургические и крановые двигатели постоянного тока серии Д
|
|
Кросна-Мотор
|
для экскаваторов
|
ДПЭ, ДПВ, ДЭ, КРЭ
|
Двигатели постоянного тока типа ДПЭ, ДПВ для экскаваторов
|
|
Кросна-Мотор
|
Для судов
|
ДПМ, ТДП
|
Судовые двигатели постоянного тока серии ДПМ без тормозов и с тормозами типа ТДП
|
|
Кросна-Мотор
|
Для городского транспорта
|
КР
|
Двигатели тяговые постоянного тока типа КР251, КР252 для транспорта
|
|
Кросна-Мотор
|
для буровых станков
|
КР661Б1, ДК410Р
|
Двигатели постоянного тока вспомогательные для транспорта ДК, КР
|
|
Кросна-Мотор
|
для буровых станков
|
КР251Б, КР411Б
|
Двигатели постоянного тока для буровых станков гусеничного хода типа КР251Б, КР411Б
|
|
Кросна-Мотор
|
для буровых станков
|
Д808Б, КР808Б
|
Двигатели постоянного тока для буровых станков шарошечного бурения типа Д808Б, КР808Б
|
|
Кросна-Мотор
|
общего применения
|
КР250
|
Двигатели постоянного тока общего применения КР250 с самовентиляцией и независимой вентиляцией
|
|
Кросна-Мотор
|
общего применения
|
Д808К
|
Двигатели постоянного тока общего применения типа Д808К с самовентиляцией
|
|
Кросна-Мотор
|
для городского электротранспорта
|
КР4367
|
Двигатель тяговый постоянного тока с полностью шихтованным магнитопроводомтипа КР4367 для трамвая с низким полом
|
|
Кросна-Мотор
|
общего применения
|
КР225
|
Двигатель тяговый постоянного тока типа КР225 с самовентиляцией и независимой вентиляцией
|
|
Кросна-Мотор
|
для кранов
|
Д908
|
Двигатель тяговый постоянного тока краново-металлургический типа Д908
|
|
Кросна-Мотор
|
для городского электротранспорта
|
|
Двигатель тяговый постоянного тока типа KP4389tD для троллейбуса с низким полом
|
|
Карпинский электромашиностроительный завод
|
для экскаваторов
|
ДПЭ, ДПВ
|
Электродвигатели постоянного тока
|
|
Карпинский электромашиностроительный завод
|
для шахт
|
ДПТ
|
Электродвигатель постоянного тока рудничный тяговый
|
|
Карпинский электромашиностроительный завод
|
для шахт
|
ДАТВ и ДАКВ
|
Электродвигатели асинхронные взрывобезопасные
|
|
Карпинский электромашиностроительный завод
|
для буровых установок
|
ДПБ
|
Электродвигатели постоянного тока серии
|
|
Карпинский электромашиностроительный завод
|
для железнодорожного транспорта
|
ДПТ
|
Электродвигатель постоянного тока тяговый ДПТ
|
|
Динамо Энерго
|
для железнодорожного транспорта
|
ДК
|
Электродвигатели постоянного тока типа ДК
|
|
Силовые машины
|
для буровых установок
для прокатных станов
|
4П
|
Двигатели постоянного тока серии 4П
|
|
Силовые машины
|
для привода механизмов шахтных подъемников, доменных печей
|
МП, МПС
|
Электродвигатели постоянного тока для скипового подъема, трубопрокатных станов, для прокатных станов и специальные
|
|
Силовые машины
|
для кранов
|
МПЭ
|
Электродвигатели постоянного тока для привода металлургических кранов
|
|
Силовые машины
|
для привода бурового станка
|
МПБ
|
Двигатели постоянного тока для привода бурового станка СБШ-270
|
|
Сибэлектропривод
|
для железнодорожного транспорта
|
ЭДК
|
Электродвигатель постоянного тока ЭДК-37 для привода компрессора тепловоза
|
|
Сибэлектропривод
|
для железнодорожного транспорта
|
ЭДТ
|
Электродвигатель тяговый постоянного тока ЭДТ для привода колесных пар магистральных и маневровых тепловозов
|
|
Сибэлектропривод
|
для большегрузных самосвалов
|
ЭДП
|
Электродвигатель тяговый типа ЭДП для работы в качестве привода мотор-колеса карьерных автосамосвалов «БелАЗ»
|
|
Белгородский электротехнический завод
|
для кранов
|
Д
|
Краново-металлургические электродвигатели постоянного тока серии Д
|
|
Белгородский электротехнический завод
|
для экскаваторов
|
ДЭ (В), ДПЭ (ДПВ), ДМПЭ
|
Экскаваторные электродвигатели постоянного тока серий ДЭ (В), ДПЭ (ДПВ), ДМПЭ (аналог двигателей серии МПЭ)
|
|
Белгородский электротехнический завод
|
общепромышленное применение
|
4П
|
Электродвигатели общепромышленного назначения постоянного тока серии 4П (мощностью от 8 кВт до 500 кВт с высотой вращения вала от 180 до 500 мм)
|
|
Белгородский электротехнический завод
|
для железнодорожного транспорта
|
4ПНЖ (В, К)
|
Электродвигатели постоянного тока серии 4ПНЖ (В, К) (аналог ДТ-51, ДТ-53, ЭТВ-20) для тяговых агрегатов железных дорог
|
|
Островский завод электрических машин
|
общепромышленное применение
|
2П, 4П
|
Электрические машины постоянного тока серии 2П, 4П
|
|
Островский завод электрических машин
|
|
ДП-112, ДК-112, ДКУ-112, МУН
|
Электродвигатели постоянного тока ДП-112, ДК-112, ДКУ-112, МУН
|
Двигатель постоянного тока — это… Что такое Двигатель постоянного тока?

Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Двигатель постоянного тока — электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
История
Краткое описание коллекторного двигателя постоянного тока
Простейший двигатель на рис. 1 является машиной постоянного тока, состоит из одного постоянного магнита на статоре, из одного электромагнита с явно выраженными полюсами на роторе (двухполюсного ротора с явно выраженными полюсами и с одной обмоткой из двух частей), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками. Имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент, в первом приближении (магнитное поле полюсов статора B — равномерное (однородное) и др.) равный
 , где
, где  — число витков обмотки ротора,
— число витков обмотки ротора,  — индукция магнитного поля полюсов статора,
— индукция магнитного поля полюсов статора,  — ток в обмотке ротора [А],
— ток в обмотке ротора [А],  — длина рабочей части витка обмотки [м],
— длина рабочей части витка обмотки [м],  — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
— расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],  — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
— синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],  — угловая скорость [рад/сек],
— угловая скорость [рад/сек],  — время [сек].
— время [сек].
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвует в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
 , где n — число щёток, alfa — угловая ширина одной щётки [радиан].
, где n — число щёток, alfa — угловая ширина одной щётки [радиан].
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1оборот =  ):
):


Рис. 2 Коллекторный двигатель постоянного тока с двухполюсным статором и с трёхполюсным ротором
Двигатель на рис. 2 состоит из одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой, трёхполюсного ротора с явно выраженными полюсами и с тремя обмотками (обмотки ротора могут быть включены звездой или треугольником), щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками. Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухполюсным ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на ассинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор
На статоре ДПТ располагаются в зависимости от конструкции:
- постоянные магниты
- электромагниты с обмотками возбуждения — катушки, наводящие магнитный поток возбуждения
В простейшем случае имеет два полюса, т.е. один магнит с одной парой полюсов.
Ротор
Состоит из электромагнитов с переключаемой полярностью и датчика положения ротора и переключателя (коллектора). В простейшем случае ротор состоит из одного электромагнита с двумя полюсами, т.е. имеет одну пару полюсов, при этом есть две «мёртвые точки» из которых невозможен самозапуск двигателя.
Рис. 3 Ротор
Ротор с тремя полюсами (полторы пары) имеет наименьшее число полюсов ротора при которых самозапуск возможен из любого положения ротора. На самом деле один полюс всё время делится на две части, т.е. ротор имеет неявные две пары полюсов. Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа (несколько десятков) катушек необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его в первом приближении можно считать сплошным однородным цилиндром с моментом инерции равным  где
где  — масса цилиндра (ротора), а
— масса цилиндра (ротора), а  — радиус цилиндра (ротора).
— радиус цилиндра (ротора).
Коллектор (коллекторный узел, щёточный узел, коллекторно-щёточный узел, щёточно-коллекторный узел)
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции — является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.

Рис. 4 Графитовые щётки
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки часто размыкают и замыкают пластины-контакты коллектора ротора, как следствие при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором положения щёток относительно статора (снижая ток коммутации), а также подключением внешних реактивных элементов (конденсаторов).
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим, при проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Классификация
- По виду магнитной системы статора
- С постоянными магнитами
- С электромагнитами
- По способу включения обмоток возбуждения электромагнитов статора
Двигатели постоянного тока различаются по способу коммутации обмоток возбуждения. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики электродвигателя. Существуют схемы независимого, параллельного, последовательного и смешанного включения обмоток возбуждения.
Принцип работы
В принципе работы электродвигателя постоянного тока есть два подхода: 1. рамка (2 стержня) с током в магнитном поле статора, 2. взаимодействие магнитных полей статора и ротора.
Рамка с током в однородном магнитном поле полюсов статора
В однородном магнитном поле полюсов статора с индукцией на два стержня рамки длиной с током действуют силы Ампера  постоянной величины, равные
постоянной величины, равные
 и направленные в противоположные стороны.
и направленные в противоположные стороны.
Эти силы прикладываются к плечам  , равным
, равным
 , где — радиус рамки, и создают крутящий момент
, где — радиус рамки, и создают крутящий момент  , равный
, равный
 .
.
Для двух стержней рамки суммарный крутящий момент равен
 . Практически из-за того, что угловая ширина щётки
. Практически из-за того, что угловая ширина щётки  [радиан] немного меньше угловой ширины зазора
[радиан] немного меньше угловой ширины зазора  между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко, четыре небольших части под кривой крутящего момента, равные
между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко, четыре небольших части под кривой крутящего момента, равные  , где
, где  , не участвуют в создании общего крутящего момента.
, не участвуют в создании общего крутящего момента.
При числе витков в обмотке равном s крутящий момент будет равен .
Наибольший крутящий момент будет при угле поворота рамки равном  , т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
, т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента делённой на длину периода  :
:

При s витков в обмотке

Две рамки с током в однородном магнитном поле полюсов статора
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π / 2, то получится четырёхполюсный ротор. Момент второй рамки:

Суммарный момент обеих рамок:

Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α [рад] немного меньше угловой ширины зазора β [рад] между пластинами коллектора (ламелями) восемь небольших частей под кривой крутящего момента, равных
 , где Δ = β − α, не участвуют в создании общего крутящего момента.
, где Δ = β − α, не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону
 , то крутящий момент для одного стержня будет равен
, то крутящий момент для одного стержня будет равен
 ,
,
для двух стержней
 ,
,
для рамки из витков
 .
.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные
 .
.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода :

При s витках в обмотке

Две рамки с током в неоднородном магнитном поле полюсов статора
Для второй (косинусной) рамки  ,
,
крутящий момент от второй (косинусной) рамки будет равен
 ,
,
суммарный крутящий момент от обеих рамок равен
 , т.е. постоянен и от угла поворота ротора не зависит.
, т.е. постоянен и от угла поворота ротора не зависит.
Практически, из-за наличия зазора, восемь небольших частей под кривой крутящего момента равные
 каждая,
каждая,
в создании крутящего момента не участвуют.
Для вычисления момента инерции ротора его можно считать в первом приближении сплошным однородным цилиндром с моментом инерции
 , где — масса цилиндра (ротора), — радиус цилиндра (ротора).
, где — масса цилиндра (ротора), — радиус цилиндра (ротора).
Взаимодействие магнитных полей
Магнитные поля статора и ротора (рамки с током), взаимоотталкиваются, чем ротор (рамка) приводится во вращение на 180°. Для дальнейшего вращения необходимо переключение направления тока в рамке.
Разновидности
Коллекторные, с щёточноколлекторным переключателем тока
С одним коллектором (щёточноколлекторным узлом) и  обмотками, где
обмотками, где  — число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
— число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
 , где
, где  — число щёток, — угловая ширина одной щётки (рад),
— число щёток, — угловая ширина одной щётки (рад),  — число пи (3,14…).
— число пи (3,14…).
С двумя коллекторами (щёточноколлекторными узлами, в бесколлекторных с инвертором на двух параллельных мостах) и двумя обмотками синусной и косинусной (синусно-косинусный, двухфазный) с неоднородным (синусообразным) магнитным полем полюсов статора. Имеют малую нерабочую часть под кривой крутящего момента, равную
 , где
, где  — угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
— угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
С тремя коллекторами и тремя обмотками (в бесколлекторных с инвертором на трёх параллельных мостах, трёхфазный).
С четырьмя коллекторами (щёточноколлекторными узлами) и двумя обмотками синусной и косинусной (синусно-косинусные), специальные. Специальная конструкция коллектора с четырьмя коллекторами (один коллектор на одну щётку) позволяет почти до нуля уменьшить нерабочую часть крутящего момента (нерабочая часть крутящего момента в этом двигателе зависит от точности изготовления деталей) и сделать используемую часть крутящего момента независимой от угловой ширины щётки. При этом угловая ширина одной пластины коллектора равна  , где — угловая ширина одной щётки.
, где — угловая ширина одной щётки.
С четырьмя коллекторами и четырьмя обмотками (в бесколлекторных — с инвертором на четырёх параллельных мостах, четырёхфазный).
С восемью коллекторами (щёточноколлекторными узлами). В этом двигателе уже нет рамок, а ток подаётся через коллекторы в отдельные стержни ротора.
И др.
Другие виды электродвигателей постоянного тока
Применение
- Электропривод тепловозов, теплоходов, карьерных самосвалов
- Стартёры автомобилей, тракторов и др. Для уменьшения номинального напряжения двигателя в автомобильных стартёрах применяют двигатель постоянного тока с четырьмя щётками, при этом эквивалентное комплексное сопротивление ротора уменьшается почти в четыре раза, при этом статор имеет четыре полюса (две пары полюсов). Пусковой ток в автомобильных стартёрах около 200 ампер. Режим работы — кратковременный.
Бесколлекторные, с электронным переключателем тока
Электронным аналогом щёточно-коллекторного узла является инвертор с датчиком положения ротора (ДПР) (Вентильный электродвигатель).
Ротор является постоянным магнитом, а обмотки статора переключаются электронными схемами — инверторами. Бесколлекторные электродвигатели могут быть однофазными (две «мёртвые точки»), двухфазными (синусно-косинусными), трёх- и более фазными.
Бесколлекторный двигатель постоянного тока с выпрямителем (мостом) может заменить универсальный коллекторный двигатель (УКД).
Управление ДПТ
Механическая характеристика ДПТ
Зависимость частоты от момента на валу ДПТ. Отображается в виде графика. Горизонтальная ось (абсцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
Регулировочная характеристика ДПТ
Зависимость частоты вращения ротора от напряжения питания обмоток ротора ДПТ. Отображается в виде графика. Горизонтальная ось (абцисс) — напряжение питания обмоток ротора, вертикальная ось (ординат) — частота вращения ротора. Регулировочная характеристика ДПТ есть прямая, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом моменте, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений момента на валу ротора говорят о семействе регулировочных характеристик ДПТ.
Управление ДПТ
Основные формулы, используемые при управлении ДПТ:
Крутящий момент, развиваемый двигателем, пропорционален току в обмотке якоря (ротора):
 , где
, где  — ток в обмотке якоря,
— ток в обмотке якоря,  — коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
— коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
Ток в обмотке ротора по закону Ома прямо пропорционален приложенному напряжению и обратно пропорционален сопротивлению обмотки ротора:
 , где
, где  — напряжение, приложенное к обмотке ротора,
— напряжение, приложенное к обмотке ротора,  — сопротивление обмотки ротора.
— сопротивление обмотки ротора.
ПротивоЭДС в обмотках якоря пропорциональна угловой частоте вращения ротора:
 , где
, где  — коэффициент ЭДС двигателя,
— коэффициент ЭДС двигателя,  — угловая скорость вращения ротора.
— угловая скорость вращения ротора.
Следовательно, величиной крутящего момента можно управлять меняя напряжение на ДПТ. Такой способ применяют для относительно маломощных двигателей.
Для управления более сильными (мощными) двигателями используют: а) принцип ШИМ, когда изменяется не величина напряжения, а длительность его приложения к двигателю, б) регулирование крутящего момента изменением напряжения на обмотке возбуждения, требует меньшую мощность элементов схемы управления, чем регулирование изменением напряжения на всём двигателе, но при этом способе регулирования ток через обмотку якоря не управляется, из-за этого даже при малом крутящем моменте большой ток через обмотку якоря будет нагревать обмотку якоря, что может привести к перегреву и выходу из строя двигателя. Возможно применение для регулирования крутящего момента в небольших пределах от номинального крутящего момента.
Управление двигателем осуществляется по току в обмотке двигателя, который пропорционален напряжению, приложенному к этой обмотке. Реакцию двигателя на данное напряжение при определённом внешнем моменте можно увидеть на соответствующей регулировочной характеристике. Регулировочная характеристика показывает скорость, которую двигатель достигнет в установившемся режиме.
Достоинства и недостатки ДПТ
Достоинства:
- Простота устройства и управления
- Практически линейные механическая и регулировочная характеристики двигателя
- Легко регулировать частоту вращения.
- Хорошие пусковые свойства (большой пусковой момент).
Недостатки:
- Необходимость профилактического обслуживания коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
См. также
Ссылки
Wikimedia Foundation.
2010.
Электродвигатели постоянного тока
— Основы, типы и применение электродвигателей постоянного тока
Практически каждое механическое усовершенствование, которое мы видим вокруг себя, достигается с помощью электродвигателя. Электрические машины — это способ преобразования энергии. Двигатели потребляют электрическую энергию и производят механическую энергию. Электродвигатели используются для питания сотен устройств, которые мы используем в повседневной жизни.
Электродвигатели в целом подразделяются на две разные категории: двигатели постоянного тока (DC) и двигатели переменного тока (AC).В этой статье мы собираемся обсудить двигатель постоянного тока и его работу. А также как работают редукторные двигатели постоянного тока.
Двигатель постоянного тока — это электродвигатель, работающий от постоянного тока. В электродвигателе работа зависит от простого электромагнетизма. Проводник с током генерирует магнитное поле, когда его помещают во внешнее магнитное поле, он сталкивается с силой, пропорциональной току в проводнике и силе внешнего магнитного поля.Это устройство, преобразующее электрическую энергию в механическую. Он работает на том факте, что проводник с током, помещенный в магнитное поле, испытывает силу, которая заставляет его вращаться относительно его исходного положения.
Практичный двигатель постоянного тока состоит из обмоток возбуждения, обеспечивающих магнитный поток, и якоря, который действует как проводник.
 Работа бесщеточных двигателей постоянного тока
Работа бесщеточных двигателей постоянного тока
На вход бесщеточного двигателя постоянного тока подается ток / напряжение, а на выходе — крутящий момент. Понять работу двигателя постоянного тока очень просто из базовой схемы, показанной ниже.Двигатель постоянного тока в основном состоит из двух основных частей. Вращающаяся часть называется ротором, а неподвижная часть также называется статором. Ротор вращается относительно статора.
 ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
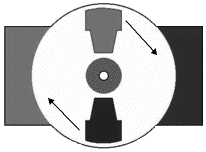
Ротор состоит из обмоток, причем обмотки электрически связаны с коммутатором. Геометрия щеток, контактов коммутатора и обмоток ротора такова, что при подаче питания полярности обмотки под напряжением и магнитов статора смещены, и ротор будет вращаться до тех пор, пока он не будет почти выпрямлен с помощью полевых магнитов статора.
Когда ротор достигает центровки, щетки перемещаются к следующим контактам коммутатора и включают следующую обмотку. Вращение меняет направление тока через обмотку ротора, вызывая переворот магнитного поля ротора, заставляя его продолжать вращаться.
Преимущества двигателя постоянного тока:
- Обеспечивают превосходное управление скоростью для ускорения и замедления
- Простая для понимания конструкция
- Простая и дешевая конструкция привода
Подключение двигателя постоянного тока к микроконтроллеру
Микроконтроллеры не могут управлять двигателями прямо.Итак, нам нужен какой-то драйвер для управления скоростью и направлением двигателей. Драйверы двигателей будут действовать как устройства взаимодействия между микроконтроллерами и двигателями. Драйверы двигателей будут действовать как усилители тока, поскольку они принимают управляющий сигнал низкого тока и обеспечивают сигнал высокого тока. Этот сильноточный сигнал используется для привода двигателей. Использование микросхемы L293D — простой способ управления двигателем с помощью микроконтроллера. Он содержит внутри две схемы драйвера H-моста.
Эта микросхема предназначена для управления двумя моторами.L293D имеет два набора устройств, где 1 набор имеет вход 1, вход 2, выход 1, выход 2 с контактом включения, а другой набор имеет вход 3, вход 4, выход 3, выход 4 с другим контактом разрешения.
Вот видео, относящееся к L293D
Вот пример двигателя постоянного тока, который связан с микроконтроллером L293D. 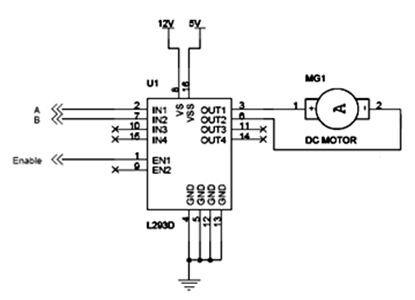 Двигатель постоянного тока, соединенный с микроконтроллером L293D
Двигатель постоянного тока, соединенный с микроконтроллером L293D
L293D имеет два набора устройств, в которых один набор имеет вход 1, вход 2, выход 1 и выход 2, а другой набор имеет вход 3, вход 4, выход 3 и выход 4, как указано выше диаграмма,
- Если контакты № 2 и 7 высокие, то контакты № 3 и 6 также высокие.Если разрешение 1 и штифт 2 высокие, а штифт 7 низкий, то двигатель вращается в прямом направлении.
- Если разрешение 1 и штифт номер 7 высокий, а штифт 2 низкий, то двигатель вращается в обратном направлении.
Сегодня двигатели постоянного тока все еще используются во многих областях, таких как игрушки и дисководы, или в больших размерах для работы сталепрокатных станов и бумагоделательных машин.
Уравнения двигателя постоянного тока
Величина испытываемого магнитного потока составляет
F = BlI
Где, B- Плотность магнитного потока, создаваемого магнитными обмотками
l- Активная длина проводника
I-Ток, проходящий через проводник
При вращении проводника индуцируется ЭДС, действующая в направлении, противоположном подаваемому напряжению.Он задается как
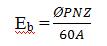
Где Ø- Fluz из-за обмоток возбуждения
P- Количество полюсов
AA постоянная
N — Скорость двигателя
Z- Количество проводников
Напряжение питания, V = E b + I a R a
Развиваемый крутящий момент равен

Таким образом, крутящий момент прямо пропорционален току якоря.
Кроме того, скорость зависит от тока якоря, следовательно, крутящий момент и скорость двигателя косвенно зависят друг от друга.
Для параллельного двигателя постоянного тока скорость остается почти постоянной, даже если крутящий момент увеличивается от холостого хода до полной нагрузки.
Для двигателя постоянного тока скорость уменьшается по мере увеличения крутящего момента от холостого хода до полной нагрузки.
Таким образом, крутящим моментом можно управлять, изменяя скорость. Управление скоростью достигается либо
- Изменением магнитного потока путем управления током через обмотку возбуждения — метод управления потоком. С помощью этого метода скорость регулируется выше номинальной.
- Контроль напряжения якоря — Обеспечивает контроль скорости ниже нормальной.
- Контроль напряжения питания — Обеспечивает контроль скорости в обоих направлениях.
Работа двигателя постоянного тока в 4 квадрантах
Как правило, двигатель может работать в 4 различных регионах:
- Как двигатель в прямом или по часовой стрелке.
- Как генератор в прямом направлении.
- Как двигатель в обратном или против часовой стрелки.
- Как генератор в обратном направлении.
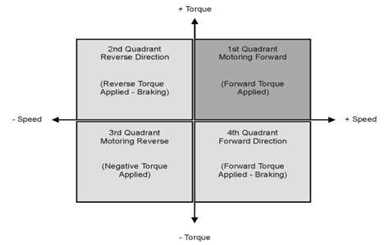 Работа двигателя постоянного тока в 4 квадрантах
Работа двигателя постоянного тока в 4 квадрантах
В первом квадранте двигатель перемещает нагрузку со скоростью и крутящим моментом в положительном направлении.
Во втором квадранте направление крутящего момента меняется на противоположное, и двигатель действует как генератор
В третьем квадранте двигатель перемещает нагрузку со скоростью и крутящим моментом в отрицательном направлении.
В квадранте 4 двигатель работает как генератор в реверсивном режиме.
В первом и третьем квадранте двигатель работает как в прямом, так и в обратном направлении. Например, двигатели в кранах, чтобы поднимать груз, а также опускать его.
Во втором и четвертом квадранте двигатель действует как генератор в прямом и обратном направлениях соответственно, и возвращает энергию источнику питания.Таким образом, способ управления работой двигателя, чтобы заставить его работать в любом из 4-х квадрантов, заключается в управлении его скоростью и направлением вращения. Скорость регулируется либо изменением напряжения якоря, либо ослаблением поля. Направление крутящего момента или направление вращения регулируется путем изменения степени, в которой приложенное напряжение больше или меньше обратной ЭДС.
Приложение для управления работой двигателя постоянного тока в 4 квадрантах
 4 квадрантное управление
4 квадрантное управление
Управление работой двигателя постоянного тока в 4 квадрантах может быть достигнуто с помощью микроконтроллера, сопряженного с 7 переключателями.
Случай 1: Когда пуск и нажат переключатель по часовой стрелке, логика микроконтроллера выдает низкий логический уровень на контакт 7 и высокий логический уровень на контакт 2, заставляя двигатель вращаться по часовой стрелке и работать в квадранте 1 st . Скорость двигателя можно изменять, нажимая переключатель PWM, вызывая приложение импульсов различной длительности к разрешающему выводу микросхемы драйвера, таким образом изменяя приложенное напряжение.
Случай 2: При нажатии переднего тормоза логика микроконтроллера применяет низкий логический уровень к выводу 7 и высокий логический уровень к выводу 2, и двигатель стремится работать в обратном направлении, вызывая его мгновенную остановку.
Аналогичным образом нажатие переключателя против часовой стрелки заставляет двигатель двигаться в обратном направлении, то есть работать в квадранте 3 rd , а нажатие переключателя тормоза заднего хода приводит к мгновенной остановке двигателя.
Таким образом, правильным программированием микроконтроллера и переключателями можно управлять работой двигателя в каждом направлении.
Типы двигателей постоянного тока
Редукторные двигатели постоянного тока:
Редукторные двигатели имеют тенденцию снижать скорость двигателя, но с соответствующим увеличением крутящего момента.Это свойство очень удобно, поскольку двигатели постоянного тока могут вращаться со скоростью, слишком высокой для электронного устройства. Мотор-редукторы обычно состоят из щеточного двигателя постоянного тока и редуктора, прикрепленного к валу. Двигатели различаются как приводные от двух соединенных между собой агрегатов. Он имеет множество применений из-за затрат на проектирование, упрощает создание приложений, таких как промышленное оборудование, приводы, медицинские инструменты и робототехника.
- Ни один хороший робот не может быть построен без шестеренок.Учитывая все обстоятельства, очень важно хорошее понимание того, как шестерни влияют на такие параметры, как крутящий момент и скорость.
- Шестерни работают по принципу механического преимущества. Это означает, что, используя разные диаметры шестерен, мы можем менять скорость вращения и крутящий момент. Роботы не имеют желаемого отношения скорости к крутящему моменту.
- В робототехнике крутящий момент лучше скорости. С шестеренками можно менять высокую скорость на лучший крутящий момент. Увеличение крутящего момента обратно пропорционально снижению скорости.
 Редукторные двигатели постоянного тока
Редукторные двигатели постоянного тока
Снижение скорости редукторного двигателя постоянного тока:
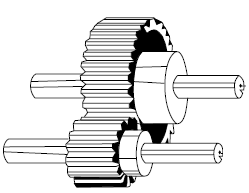 Снижение скорости редукторного двигателя постоянного тока
Снижение скорости редукторного двигателя постоянного тока
Снижение скорости в зубчатых передачах состоит из маленькой шестерни, приводящей в движение большую шестерню. В редукторе может быть несколько комплектов этих редукторов. Иногда цель использования редукторного двигателя состоит в том, чтобы уменьшить скорость вращения вала двигателя в приводимом устройстве, например, в небольших электрических часах, где крошечный синхронный двигатель может вращаться со скоростью 1200 об / мин, но снижается до одного об / мин для привода. секундная стрелка и дополнительно уменьшенная в часовом механизме для управления минутной и часовой стрелками.Здесь величина движущей силы не имеет значения, пока ее достаточно для преодоления фрикционных ударов часового механизма.
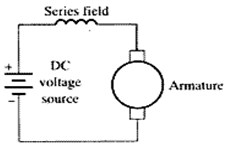
Двигатель постоянного тока серии :
Двигатель серии
представляет собой двигатель постоянного тока, в котором обмотка возбуждения соединена внутри последовательно с обмоткой якоря. Серийный двигатель обеспечивает высокий пусковой момент, но никогда не должен работать без нагрузки и способен перемещать очень большие нагрузки на валу при первом включении. Серийные двигатели также известны как двигатели с последовательной обмоткой.
В последовательных двигателях обмотки возбуждения последовательно соединены с якорем. Напряженность поля меняется с увеличением тока якоря. Когда его скорость снижается из-за нагрузки, серийный двигатель развивает более высокий крутящий момент. Его пусковой момент больше, чем у других двигателей постоянного тока. Он также может легче излучать тепло, накопленное в обмотке, из-за большого количества протекающего тока. Его скорость значительно меняется между полной и нулевой нагрузкой. Когда нагрузка снимается, скорость двигателя увеличивается, а ток через якорь и катушки возбуждения уменьшается.Работа больших машин без нагрузки опасна.
 Двигатель серии
Двигатель серии
Ток через якорь и катушки возбуждения уменьшается, сила силовых линий вокруг них ослабевает. Если бы сила магнитных линий вокруг катушек уменьшалась с той же скоростью, что и ток, протекающий через них, то и те, и другие уменьшались бы с той же скоростью, с которой увеличивается скорость двигателя.
Преимущества серийного двигателя:
- Огромный пусковой крутящий момент
- Простая конструкция
- Простое проектирование
- Простое техническое обслуживание
- Экономически выгодно
Применения серийного двигателя:
Двигатели серии
могут производить огромную мощность вращения, крутящий момент из состояния покоя.Эта характеристика делает серийные двигатели подходящими для небольших электроприборов, универсального электрического оборудования и т. Д. Серийные двигатели не подходят, когда требуется постоянная скорость. Причина в том, что скорость серийных двигателей сильно меняется в зависимости от нагрузки.
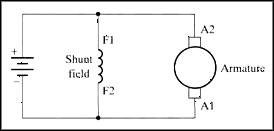
Шунтирующий двигатель :
Шунтирующий двигатель — это шунтирующий двигатель постоянного тока, в котором обмотки возбуждения шунтированы или подключены параллельно обмотке якоря двигателя. Шунтирующий двигатель постоянного тока обычно используется из-за его наилучшего регулирования скорости.Также, следовательно, как обмотка якоря, так и обмотки возбуждения находятся под одним и тем же напряжением питания, однако существуют дискретные ветви для потока тока якоря и тока возбуждения.
Параллельный двигатель имеет несколько отличительных рабочих характеристик от серийного двигателя. Поскольку катушка шунтирующего возбуждения сделана из тонкой проволоки, она не может производить большой ток для запуска, как последовательное поле. Это означает, что параллельный двигатель имеет чрезвычайно низкий пусковой момент, что требует, чтобы нагрузка на вал была довольно небольшой.
 Шунтирующий двигатель
Шунтирующий двигатель
Когда на шунтирующий двигатель подается напряжение, через шунтирующую катушку протекает очень слабый ток. Якорь шунтирующего двигателя аналогичен серийному двигателю, и он потребляет ток для создания сильного магнитного поля. Из-за взаимодействия магнитного поля вокруг якоря и поля, создаваемого вокруг шунтирующего поля, двигатель начинает вращаться. Как и в серийном двигателе, когда якорь начинает вращаться, он производит обратную ЭДС. Обратная ЭДС приведет к тому, что ток в якоре начнет уменьшаться до очень небольшого уровня.Величина тока, потребляемого якорем, напрямую зависит от размера нагрузки, когда двигатель достигает полной скорости. Поскольку нагрузка обычно мала, ток якоря будет небольшим.
Преимущества параллельного двигателя:
- Простое управление, обеспечивающее высокий уровень гибкости для решения сложных проблем привода
- Высокая доступность, поэтому требуются минимальные усилия по обслуживанию
- Высокий уровень электромагнитной совместимости
- Очень плавная работа, поэтому низкое механическое напряжение всей системы и высокие динамические процессы управления.
- Широкий диапазон регулирования и низкие скорости, поэтому универсальное применение.
Применения параллельного двигателя:
Параллельные двигатели постоянного тока очень подходят для применений с ременным приводом.Этот двигатель с постоянной скоростью используется в промышленных и автомобильных приложениях, таких как станки и намоточные / разматывающие машины, где требуется высокая точность крутящего момента.
Фото:
.
Электродвигатели постоянного тока — Большая химическая энциклопедия
Отбор мощности от двигателя или трансмиссии. Этот тип системы ограничен tmcks, и есть несколько доступных средств взлета. Большинство из них представляют собой оборудование для выработки электроэнергии с ременным приводом от коленчатого вала двигателя, которое вырабатывает либо регулируемое напряжение переменного тока, либо выпрямленный постоянный ток для двигателей компрессора и вентилятора в корпусе. [Pg.69]
Центробежный насос с прямым приводом от электродвигателя с регулируемой скоростью — это наиболее часто используемая комбинация оборудования для перекачивания с регулируемой скоростью.Двигатель управляется электронным регулятором скорости двигателя, функция которого заключается в генерации формы волны напряжения или тока, необходимой двигателю, чтобы скорость двигателя отслеживала входной командный входной сигнал от контроллера процесса. [Pg.793]
Электроэнергия, подаваемая на электродвигатели, может быть от источника постоянного (dc) или переменного тока (ac). Поскольку двигатели постоянного тока больше … [Pg.400]
Итало-американский физик Никола Тесла изобретает двигатель, вырабатывающий переменный ток.Это открытие меняет способ передачи электричества на большие расстояния. Первая коммерческая передача электроэнергии на большие расстояния происходит, когда линия постоянного тока обеспечивает питание от Уилламетт Фоллс для уличных фонарей в Портленде, штат Орегон. [Стр.1245]
Это очень хороший двигатель для прямого подключения к определенным нагрузкам, особенно там, где требуется постоянная скорость. NEMA определяет его как синхронную машину, которая преобразует электрическую энергию из системы переменного тока в механическую.Обычно он имеет возбуждение поля постоянным током с помощью генератора постоянного тока с отдельным приводом или генератора, напрямую подключенного к двигателю. Этот двигатель остается синхронизированным с частотой питающей сети и на него не влияет нагрузка. При правильном применении необходимо учитывать следующее … [Pg.631]
Скорость работы электродвигателей переменного (AC) и постоянного (DC) тока варьируется. Поэтому для целей мониторинга эти двигатели следует классифицировать как машины с регулируемой скоростью.Следует установить узкополосное окно для отслеживания истинной скорости бега. [Pg.702]
Хотя во время своих ранних изобретений доктор Шуп предполагал, что электрическая дуга может быть использована для производства расплавленного металла для распыления, прошло сорок лет, прежде чем этот метод стал коммерчески важным. Затем в Германии, России и Японии на основе дуги изготавливали инструменты. Хотя в Японии используется переменный ток, шум почти недопустим, и в других местах используется постоянный ток от двигателей-генераторов.Основная идея состоит в том, что два провода, тщательно изолированные друг от друга, продвигаются так, чтобы встретиться в точке, где образуется дуга, непосредственно перед струей … [Pg.419]
Кончик сначала приближается к образец через грубый позиционер по оси Z, такой как пьезоэлектрический двигатель с контролируемым приближением. Это обеспечивает размер шага 10 А и, следовательно, обеспечивает очень точное и контролируемое движение. Как только обнаруживается туннельный ток, наконечник останавливается и включается система точного управления.Таким образом, выступ устанавливается на конце полого цилиндрического пьезокристалла, трубчатого сканера (пьезоэлектрический кристалл может деформироваться под действием приложенного к нему напряжения). Сканер трубок имеет четыре полосковых электрода на внешней стороне, обеспечивающих перемещение в направлениях x и y (боковое перемещение), и один электрод, покрывающий всю внутреннюю часть. A … [Стр.73]
Паровая турбина — машина с древней генеалогией. Это прямой потомок водяного колеса, которое положило начало промышленной революции в Англии, и ветряная мельница, которая до сих пор используется в Португалии.Турбины широко используются на технологических предприятиях для привода всего, от насосов мощностью 2 л.с. до центробежных компрессоров мощностью 20 000 л.с. Это универсальные машины в том смысле, что они по сути являются устройствами с регулируемой скоростью. Электродвигатели по своей сути являются машинами с фиксированной скоростью. Это правда, что существует множество способов преобразовать двигатели переменного тока (переменного тока) в регулируемую скорость, но все они дороги и сложны. [Pg.203]
Для людей, занятых в области электроэнергетики, следует отметить, что омико-индуктивные цепи с индуктивными цепями с отношением L / R соответствуют стандарту EN 50020.Для сравнения: в силовых цепях контакторы и пускатели двигателей для применения постоянного тока рассчитаны на отношения L / R в диапазоне 1 мс = L / R 15 мс … [Pg.20]
.
электродвигатель постоянного тока — определение
Примеры предложений с «электродвигателем постоянного тока», память переводов
 патент-wipoСистема управления электродвигателями постоянного тока
патент-wipoСистема управления электродвигателями постоянного тока  tmClassFan блоки для асинхронных двигателей, электродвигатели постоянного тока, серводвигатели tmClass Электродвигатели постоянного тока, бесщеточные электродвигатели постоянного тока tmClass Контроллеры на базе микропроцессоров для электродвигателей, электродвигателей постоянного тока или бесщеточных электродвигателей постоянного тока патент-wipo Ограничитель питающего тока для электродвигателя постоянного тока Контроллеры для электродвигателей tmClass , электродвигатели постоянного тока или бесщеточные электродвигатели постоянного тока патент-wipo Электродвигатель постоянного тока, который исключает внешний корпус и помещает щетки и дроссели в экономичные места Электродвигатели tmClassDC (постоянного тока) патент-wipoD Электродвигатель постоянного тока во взрывозащищенном исполнении патентов-wipo Метод определения скорости блокировки постоянного крутящего момента электродвигателя постоянного тока патентов-wipo Электродвигатель постоянного тока с полым ротором патентов-wipo Электродвигатель постоянного тока с гибкой конструкция ротора и способ его производства патентов-wipo Электродвигатель постоянного тока, в частности, для управления автоматическими раздвижными дверями патентов-wipo Метод электронной коммутации в электродвигателях постоянного тока tmClass Бесщеточный электродвигатель постоянного тока электродвигатель постоянного тока tmClass Электродвигатели постоянного тока с постоянным магнитом электродвигатели постоянного тока tmClass Электродвигатели tmClass, а именно электродвигатели постоянного тока, бесщеточные электродвигатели постоянного тока и малые электродвигатели для автотранспортных средств
tmClassFan блоки для асинхронных двигателей, электродвигатели постоянного тока, серводвигатели tmClass Электродвигатели постоянного тока, бесщеточные электродвигатели постоянного тока tmClass Контроллеры на базе микропроцессоров для электродвигателей, электродвигателей постоянного тока или бесщеточных электродвигателей постоянного тока патент-wipo Ограничитель питающего тока для электродвигателя постоянного тока Контроллеры для электродвигателей tmClass , электродвигатели постоянного тока или бесщеточные электродвигатели постоянного тока патент-wipo Электродвигатель постоянного тока, который исключает внешний корпус и помещает щетки и дроссели в экономичные места Электродвигатели tmClassDC (постоянного тока) патент-wipoD Электродвигатель постоянного тока во взрывозащищенном исполнении патентов-wipo Метод определения скорости блокировки постоянного крутящего момента электродвигателя постоянного тока патентов-wipo Электродвигатель постоянного тока с полым ротором патентов-wipo Электродвигатель постоянного тока с гибкой конструкция ротора и способ его производства патентов-wipo Электродвигатель постоянного тока, в частности, для управления автоматическими раздвижными дверями патентов-wipo Метод электронной коммутации в электродвигателях постоянного тока tmClass Бесщеточный электродвигатель постоянного тока электродвигатель постоянного тока tmClass Электродвигатели постоянного тока с постоянным магнитом электродвигатели постоянного тока tmClass Электродвигатели tmClass, а именно электродвигатели постоянного тока, бесщеточные электродвигатели постоянного тока и малые электродвигатели для автотранспортных средств  WikiMatrixRansomes также производит электродвигатели постоянного тока различных типоразмеров, электрические вилочные погрузчики и тракторы. tmClassЭлектродвигатели, а именно двигатели постоянного тока, бесщеточные двигатели постоянного тока и небольшие электродвигатели для приведения в движение и регулировки сидений транспортных средств in 1837. Patents-WIPO Изобретение, кроме того, относится к схеме пуска для электродвигателя постоянного тока, содержащей блок управления согласно изобретению.
WikiMatrixRansomes также производит электродвигатели постоянного тока различных типоразмеров, электрические вилочные погрузчики и тракторы. tmClassЭлектродвигатели, а именно двигатели постоянного тока, бесщеточные двигатели постоянного тока и небольшие электродвигатели для приведения в движение и регулировки сидений транспортных средств in 1837. Patents-WIPO Изобретение, кроме того, относится к схеме пуска для электродвигателя постоянного тока, содержащей блок управления согласно изобретению.
Показаны страницы 1. Найдено 211 предложения с фразой электродвигатель постоянного тока.Найдено за 25 мс.Накопители переводов создаются человеком, но выравниваются с помощью компьютера, что может вызвать ошибки. Найдено за 0 мс.Накопители переводов создаются человеком, но выравниваются с помощью компьютера, что может вызвать ошибки. Они поступают из многих источников и не проверяются. Имейте в виду.
.
производителей электродвигателей | Поставщики электродвигателей
Список производителей электродвигателей
Применения
Электродвигатели переменного и постоянного тока имеют одно общее применение — приводное оборудование. В этом контексте техника может быть чем угодно, от грузовика до электрической зубной щетки.
Электродвигатели приводят в действие продукцию в бесчисленных отраслях промышленности, включая электронику, строительство, товары для дома и офиса, бытовую технику (двигатели смесителей, двигатели холодильников и т. Д.)), автомобилестроение, транспорт и промышленное производство. Самые большие электродвигатели используются для таких приложений, как сжатие трубопроводов, движение судов и гидроаккумулирование, в то время как самые маленькие электродвигатели могут поместиться в электрических часах.
История
Электродвигатели появились в 1740-х годах, когда шотландский монах по имени Эндрю Гордон создал первое электростатическое устройство. Примерно 60 лет спустя, в 1820 году, французский физик Андре-Мари Ампер обнаружил, как можно создать механическую силу, облегчая взаимодействие между двумя проводниками с током.Он записал этот принцип, который позже стал известен как закон силы Ампера. От его имени мы также получили базовую единицу измерения электрического тока в системе СИ — ампер или ампер.
Через год после того, как Ампер открыл закон силы Ампера, британский ученый Майкл Фарадей успешно провел эксперименты, демонстрирующие этот принцип. Сначала он окунул провод в ртуть и прикрепил к нему постоянный магнит. Затем он пропустил ток через провод. Когда ток двигался по проволоке, проволока вращалась вокруг магнита.Это доказало, что ток создает круговое магнитное поле вокруг провода. В 1822 году человек по имени Питер Барлоу провел аналогичный, но обновленный эксперимент. Во время своего эксперимента он окунул кончики звездообразного колеса (колеса Барлоу) в ртуть, когда оно вращалось. Его результаты его эксперимента перекликались с результатами Фарадея.

Бесщеточный двигатель постоянного тока — решения для электродвигателей
Подобные эксперименты установили определенные принципы, такие как электромагнитная индукция, которые позже ученые и инженеры могли использовать в качестве отправной точки.Например, в 1827 году венгерский священник и ученый Аньош Йедлик построил первый узнаваемый электродвигатель — он содержал ротор, статор и коммутатор. Несколько лет спустя он построил модель автомобиля, работавшую от электродвигателя. В 1832 году британский ученый Уильям Стерджен построил первый электродвигатель постоянного тока. В 1834 году американский кузнец Томас Дэвенпорт изобрел электродвигатель с батарейным питанием, с помощью которого он приводил в движение гусеничные малолитражки. Через три года после этого Давенпорт и его жена Эмили запатентовали конструкцию первого электродвигателя, который можно было использовать в коммерческих целях.В 1840 году он использовал свой электродвигатель для привода станков и печатного станка, чтобы напечатать собственную газету по механике. Это была первая газета, печатавшаяся на электроэнергии. Изобретения Давенпорта были гениальными, но, поскольку батареи еще не были экономически жизнеспособными, он в конечном итоге обанкротился.
Примерно в то же время немецкий физик и инженер Мориц фон Якоби создал вращающийся электродвигатель, с помощью которого он мог приводить в движение небольшую электрическую лодку через реку.В 1871 году бельгийский инженер-электрик Зеноб Грамм построил первый двигатель постоянного тока, который приносил хоть какие-то деньги. В 1887 году Никола Тесла изобрел двигатель переменного тока, продукт, который использует переменный ток и не требует коммутатора. Примерно в то же время, в 1886 году, американец Фрэнк Дж. Спраг изобрел первый неискрящий двигатель постоянного тока, который мог продолжать двигаться с одинаковой скоростью независимо от нагрузки. Между 1887 и 1888 годами Спраг изобрел электрические тележки, которые инженеры впервые применили в Ричмонде, штат Вирджиния.В 1892 году он изобрел электрический лифт и спроектировал L-систему Чикаго, более формально известную как Южная эстакада.
В 20 веке электромоторы изменили мир. Они сократили рабочую силу повсюду, от производственного цеха до дома, они сделали машины более эффективными, они повысили уровень жизни, они позволили производить лучшую продукцию и расширили возможности путешествий. Сегодня электродвигатели — неотъемлемая часть нашей жизни.
Конструкция
При выборе или разработке нестандартных двигателей для вас производители электродвигателей будут учитывать различные аспекты вашего применения, в том числе, насколько быстро вы хотите, чтобы двигатель работал, как часто вы его будете использовать, и среду, в которой вы будет использовать его и загружать детали (вес, местоположение и т. д.). Основываясь на этих факторах, они будут выбирать между мощностью переменного тока и мощностью постоянного тока, мощностью в лошадиных силах / ваттах (выходная мощность), числом оборотов в минуту (оборотов в минуту), изменчивостью скорости по сравнению с фиксированной скоростью вращения и номинальными значениями тока.Производители также могут варьировать ваши электродвигатели по количеству роторов и магнитных полюсов статора и размерам. Узнайте больше, рассмотрев свое приложение с потенциальными поставщиками.
Характеристики
Компоненты
Вообще говоря, электродвигатели состоят из ротора, статора, обмоток, воздушного зазора и коммутатора.
Ротор
В этом контексте ротор представляет собой движущуюся часть, которая передает механическую мощность при перемещении вала.Для достижения этого вращательного движения ротор обычно конструируется со встроенными токонесущими проводниками, которые взаимодействуют с магнитным полем, создаваемым статором. Однако в некоторых случаях ротор несет на себе магниты, а статор удерживает проводники.
Статор
В отличие от ротора, статор не движется. Скорее, это фиксированный компонент электромагнитной цепи двигателя. Обычно он состоит из сердечника и постоянных магнитов или обмоток. Этот сердечник состоит из нескольких тонких металлических листов, называемых пластинами, которые используются для уменьшения потерь энергии.
Обмотки
Обмотки спиральные. Когда они оборачиваются вокруг сердечника и после того, как на них подается ток, назначение этих катушек — формирование магнитных полюсов.
Воздушный зазор
Далее воздушный зазор — это расстояние между ротором и статором. Воздушный зазор обеспечивает большую часть низкого коэффициента мощности, при котором работают двигатели, за счет увеличения и уменьшения тока намагничивания по мере необходимости. Таким образом, поскольку большой воздушный зазор оказывает сильное негативное влияние на характеристики двигателя и может вызвать механические проблемы, потери и шум, воздушный зазор должен быть как можно меньше.
Коммутатор
Наконец, коммутатор — это часть, используемая для периодического переключения направления тока между внешней цепью и ротором. Он используется с большинством двигателей постоянного тока и с универсальными двигателями. Коммутатор состоит из цилиндра, состоящего из нескольких металлических контактов или контактных колец, сегментов и якоря, на котором сегменты вращаются. Два или более электрических контакта, называемых щетками, создают скользящий контакт с сегментами, прижимаясь к ним при их вращении, позволяя току проходить через них и достигать ротора.
Конфигурации
Все электродвигатели имеют две основные конфигурации полюса магнитного поля, из которых можно выбрать: явный полюс и невыраженный полюс.
Яркий полюс
Магнитное поле явнополюсной машины создается обмоткой, намотанной под лицевой стороной полюса.
Невыступающий полюс
В случае машины с невыпадающими полюсами, также известной как машина с круглым ротором или машина с распределенным полем, обмотки создают магнитное поле, когда они наматываются на прорези на торцах полюсов.
Затененный полюс
Третья конфигурация полюса, затененный полюс, задерживает фазу магнитного поля полюса. Для этого требуется обмотка, состоящая из медного стержня или кольца, называемая затеняющей катушкой, которая огибает определенную часть этого полюса.
Типы
Типы по источнику тока
Электродвигатели переменного тока питаются от приложенного переменного тока. Переменные токи, которые проходят через катушки, создают вращающееся магнитное поле, которое, в свою очередь, передает крутящий момент на выходной вал.Им не нужен коммутатор. Общие источники питания переменного тока включают инверторы, генераторы и электрические сети.
Двигатели постоянного тока получают питание от постоянного тока. Напряжение, создаваемое токами, заставляет обмотку якоря вращаться, в то время как невращающаяся обмотка каркаса поля якоря действует как постоянный магнит. Пользователи двигателей постоянного тока могут управлять своей скоростью, регулируя ток корпуса возбуждения или изменяя приложенное напряжение. Токи постоянного тока часто вырабатываются выпрямителями, электромоторами и батареями.
Универсальные двигатели могут работать как на переменном, так и на постоянном токе.
Типы по внутренней конструкции
Щеточные электродвигатели , иногда называемые коммутируемыми электродвигателями, являются одним из двух основных типов электродвигателей, классифицируемых по внутренней конструкции. Щеточные двигатели, которые почти всегда используют постоянный ток, получили свое название от коммутатора, который поставляется с несколькими щетками. Эти щетки всегда сделаны из мягкого проводящего материала; почти исключительно производители используют углерод, иногда с добавлением медного порошка для улучшения проводимости.Пять основных типов щеточных двигателей: двигатели с раздельным возбуждением, двигатели с последовательной обмоткой постоянного тока, двигатели постоянного тока с постоянными магнитами, комбинированные двигатели постоянного тока и двигатели с параллельной обмоткой постоянного тока.
Бесщеточные двигатели намного более эффективны, чем щеточные двигатели, и они быстро их заменяют. В этих двигателях вместо щеток используются датчики, известные как датчики на эффекте Холла, для передачи тока. Они состоят из трехфазной катушки, внешнего ротора с постоянным магнитом, электроники привода и датчика.Трехфазная катушка — это элемент двигателя, который ссылается на другой тип классификации двигателей, основанный на способах движения двигателя.
Мотор-редукторы используют зубчатые головки для изменения скорости.
Электродвигатели со ступицей — это двигатели, встроенные в ступицу колеса. Они напрямую приводят в движение колесо.
Типы по средствам движения
Наиболее распространенные классификации движения двигателей включают трехфазные двигатели, однофазные двигатели, линейные двигатели, шаговые двигатели и двигатели 12 В.
Трехфазные электродвигатели отличаются простотой конструкции и высоким КПД. Обычно это тип асинхронного двигателя, трехфазный двигатель работает с использованием трех переменных токов, которые распределяют преобразованную механическую энергию.
Однофазные двигатели — еще один пример асинхронного двигателя. На этот раз они используют однофазный или однофазный источник питания двигателя, которым обычно является переменный ток.
Линейные двигатели вырабатывают механическую энергию по прямой или линейной линии.Другими словами, линейные двигатели обеспечивают движение в одной плоскости.
Шаговые двигатели во многом похожи на трехфазные синхронные двигатели. Основное различие между ними заключается просто в том, что, хотя 3-фазные синхронные двигатели вращаются непрерывно, шаговые двигатели должны непрерывно запускаться и останавливаться. Шаговые двигатели широко используются в 3D-принтерах и роботах.
Двигатели на 12 В генерируют движение, используя двенадцать вольт электроэнергии, что является стандартным.
Типы по методу преобразования энергии
Наконец, электродвигатели по-разному преобразуют энергию.Таким образом, двигатели делятся на синхронные, асинхронные, электростатические и серводвигатели.
Синхронные двигатели — это двигатель переменного тока. Они преобразуют напряжение в энергию, используя проходящий ток и ротор, которые движутся с одинаковой скоростью. Вместе эти элементы создают вращающееся магнитное поле. Синхронные двигатели обладают способностью поддерживать постоянную скорость при изменении крутящего момента.
Асинхронные двигатели , иногда называемые асинхронными двигателями, работают по принципу электромагнитной индукции.По сути, они работают, когда электрический проводник проходит через магнитное поле и впоследствии производит напряжение. Асинхронные двигатели дешевле синхронных.
Электростатические двигатели работают за счет притяжения и отталкивания электрического заряда. Обычно они потребляют много энергии, но доступны и меньшие модели, использующие более низкое напряжение. Например, небольшие электростатические двигатели являются обычными компонентами микромеханических систем (MEMS).
Серводвигатели работают с использованием сервомеханизмов (сервоприводов), которые обнаруживают ошибки и автоматически исправляют их.У них также есть встроенные микроконтроллеры, которые позволяют пользователям предлагать им перемещать точное количество градусов, когда они захотят. Серводвигатели исключительно малы. Они распространены в роботизированных приводах, автомобилях с дистанционным управлением и самолетах для хобби.
Принадлежности
Электродвигатели имеют бесчисленное множество принадлежностей. Примеры распространенных аксессуаров для электродвигателей включают преобразователи фазы (используемые для преобразования мощности переменного тока в мощность постоянного тока и наоборот), подшипники, крышки вентиляторов, комплекты двигателей, монтажные комплекты, дождевики, комплекты тормозов, пульты дистанционного управления, контроллеры скорости / напряжения и распределительные коробки.
Стандарты
В Соединенных Штатах одним из наиболее важных наборов стандартов, связанных с электродвигателями, являются стандарты, разработанные NEMA или Национальной ассоциацией производителей электрооборудования. NEMA присваивает разным двигателям стандартные размеры, которые вы можете просмотреть в таблицах, которые они отправляют производителям. Другие стандартные требования связаны с вашей отраслью, областью применения и местоположением. Изучите стандарты, которым должны соответствовать ваши электродвигатели, поговорив с лидерами отрасли.
На что следует обратить внимание
Если вы ищете электродвигатель, первое, что вам нужно сделать, это убедиться, что вы знаете свои характеристики. Мы рекомендуем, прежде чем звонить любым производителям, перечислить все, что вы ищете (или не ищете), включая данные вашего приложения, ваш бюджет, срок доставки, ваши предпочтения после доставки (помощь в установке, техническая поддержка и т. .) и ваши стандартные требования. Подробное обсуждение этих вопросов с компанией, производящей электромоторы, поможет вам понять, подходят ли вы друг другу.
Чтобы найти «правильную посадку», ознакомьтесь с перечнем высококачественных производителей, которые мы перечислили на этой странице. Просмотрите их профили и веб-страницы, чтобы узнать, подходят ли они вам. Выберите трех или четырех главных претендентов, а затем позвоните каждому из них, чтобы обсудить вашу заявку. После того, как вы поговорите с каждым из них, сравните и сопоставьте свои разговоры и выберите тот, который, по вашему мнению, предложит вам лучший сервис в рамках вашего бюджета и временных рамок. Удачи!
Информационное видео об электродвигателях
.