
ТРМ251 ПИД-регулятор с пошаговыми программами и RS-485
Проанализировав опыт эксплуатации промышленных регуляторов со встроенным таймером и поддержкой выполнения программ технолога (ТРМ501, ТРМ151, МПР51), компания ОВЕН выпустила на рынок ТРМ251 – программный ПИД регулятор. Этот прибор объединил в себе возможности современного, универсального средства управления технологическим процессом, простоту в эксплуатации, интуитивно понятный интерфейс оператора и надежность, обеспеченную применением современной элементной базы. ТРМ251 соответствует классу «А» по электромагнитной совместимости в промышленных условиях.
Назначение прибора ОВЕН ТРМ251
Одноканальный программный ПИД-регулятор ОВЕН ТРМ251 применяется для управления многоступенчатыми температурными режимами в системах управления электропечами (камерными, элеваторными, шахтными, плавильными и др.).
Прибор имеет удобный, интуитивно понятный человеко-машинный интерфейс.
Прибор выпускается в корпусах 2-х типов: настенном Н и щитовом Щ1.
Функциональные возможности прибора ОВЕН ТРМ251
- Два универсальных входа (основной и резервный)
- Функция резервирования датчиков – автоматическое включение резервного датчика в случае отказа основного
- Время опроса входа – 300 мс
- Программное пошаговое ПИД-регулирование – 3 программы технолога по 5 шагов
- Автонастройка ПИД-регулятора по современному эффективному алгоритму
- Три управляющих выхода:
- управление исполнительным механизмом (э/м реле, транзисторная или симисторная оптопара, 4…20 мА, выход для управления внешним твердотельным реле)
- сигнализация о выходе регулируемой величины за заданные пределы (э/м реле)
- сигнализация о неисправности датчика или обрыве контура регулирования LBA (э/м реле) или регистрация (4…20 мА)
- Удобный человеко-машинный интерфейс
- Сетевой интерфейс RS-485 (протоколы Modbus RTU/ASCII, ОВЕН)
- Конфигурирование на ПК или с лицевой панели прибора
- Функция сохранения образа EEPROM
ПИД-регуляторы пошаговые по низким ценам.
 Устройства ПИД регулирования.
Устройства ПИД регулирования.
пошаговые ПИД регуляторы
ПИД регулятор. Определение
ПИД регулятор (пропорционально-интегрально-дифференциальный регулятор) — устройство в цепи обратной связи, используемое в системах автоматического управления для поддержания заданного значения измеряемого параметра. В основе работы регулятора лежит ПИД принцип.
Назначение пошаговых ПИД-регуляторов
Шаговые ПИД регуляторы предназначены для:
- измерения температуры или другой физической величины (веса, давления, влажности и т. п.),
- импульсного или аналогового управления нагрузкой по пропорционально-интегрально-дифференциальному (ПИД) закону, а также для формирования дополнительного сигнала, который может быть использован для сигнализации о выходе параметра за установленные границы или для двухпозиционного регулирования;
Современные пошаговые ПИД регуляторы могут использоваться для решения большого круга задач.
Пошаговые ПИД регуляторы предназначены для управления многоступенчатыми температурно-влажностными режимами технологических процессов при производстве мясных и колбасных изделий, в хлебопекарной промышленности, в инкубаторах, термо- и климатокамерах, варочных и сушильных шкафах, при сушке древесины, изготовлении железобетонных конструкций и пр. Пошаговые ПИД регуляторы могут работать в режиме регулирования температуры с помощью механической задвижки с электроприводом, используя закон регулирования – ПИД. В программном режиме ПИД регуляторы обеспечивают плавное или ступенчатое изменение температуры по программе. Можно задать десятки программ, а также объединить несколько программ для получения одной более длинной. Программа может содержать участки роста (снижения) температуры с нужной скоростью и выдержки при заданной температуре. ПИД регуляторы могут обеспечивать различную скорость изменения температуры и задаваемые временные интервалы на каждом шаге программы.
Пошаговые ПИД регуляторы могут работать в режиме регулирования температуры с помощью механической задвижки с электроприводом, используя закон регулирования – ПИД. В программном режиме ПИД регуляторы обеспечивают плавное или ступенчатое изменение температуры по программе. Можно задать десятки программ, а также объединить несколько программ для получения одной более длинной. Программа может содержать участки роста (снижения) температуры с нужной скоростью и выдержки при заданной температуре. ПИД регуляторы могут обеспечивать различную скорость изменения температуры и задаваемые временные интервалы на каждом шаге программы.
Доставка пошаговых ПИД регуляторов в города Юга России
Мы доставим Ваш заказ в течении одного — двух дней в города: Таганрог, Новочеркасск, Азов, Шахты, Волгодонск, Сальск, Краснодар, Тихорецк, Тимашевск, Сочи, Новороссийск, Анапа, Туапсе, Геленджик, Ейск, Майкоп, Армавир, Волгоград, Элиста, Астрахань, Ставрополь, Невинномысск, Минеральные Воды, Кисловодск, Пятигорск, Железноводск, Черкесск, Нальчик, Владикавказ, Грозный, Махачкала.
Техническая документация и гарантии на ПИД-регуляторы
На все виды пошаговых регуляторов ПИД принципа наша компания представляет полный пакет сопроводительных документов и технической документации. Все приборы имеют длительный срок эксплуатации и обеспечиваются заводской гарантией и сервисным обслуживанием. Инженеры нашей компании готовы предоставить самую подробную информацию о шаговых ПИД-регуляторах и способах их установки.
Универсальный двухканальный программный ПИД-регулятор ОВЕН ТРМ151 — Документация и ПО
Отгрузка осуществляется в любой город России, а также: Белгород, Алексеевка, Беловское, Северный, Октябрский, Разумное, Стрелецкое, Таврово, Борисовка, Валуйки, Вейделевка, Волоконовка, Головчино, Губкин, Мелихово, Бехтеевка, Короча, Погореловка, Алексеевка, Красное, Бирюч, Ливенка, Красная Яруга, Новый Оскол, Прохоровка, Беленихино, Пролетарский, Сумовский, Ракитное, Ровеньки, Старый Оскол, Чернянка, Шебекино, Маслова Пристань, Яковлево, Строитель, Томаровка, Ржевка
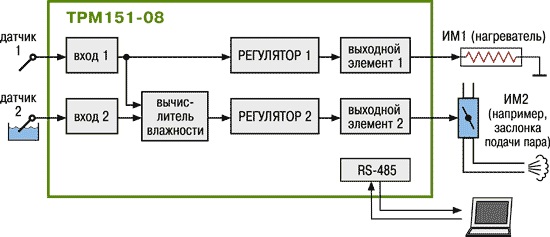
Универсальный двухканальных программный ПИД-регулятор ТРМ151 применяется для создания систем управления различного уровня сложности — от контуров локального регулирования до комплексных систем управления объектами с интеграцией в АСУ
-
1 или 2 канала пошагового регулирования -
2 встроенных универсальных входа и два выхода -
Программное управление различными исполнительными механизмами:
— 2- позиционными (ТЭНами, двигателями),
— 3-позиционными (задвижками, кранами),
— дополнительными устройствами (заслонками, жалюзи, дымо- или парогенераторами и т. п.)
п.) -
Автонастройка ПИД-регулятора по современному эффективному алгоритму -
Госреестр № 32481-06
 п.)
п.)
Госповерка: уже проведена
| Название | Примечание | Ссылка |
|---|---|---|
| Программное обеспечение. Модификации ТРМ151-09 | Скачать | |
| Программное обеспечение. Модификации ТРМ151-10 | Скачать | |
| Программное обеспечение.EasyGoTPM151_01 | Скачать | |
| Программное обеспечение.EasyGoTPM151_03 | Скачать | |
Программное обеспечение. EasyGoTPM151_04 EasyGoTPM151_04 | Скачать | |
| Программное обеспечение.EasyGoTPM151_05 | Скачать | |
| Программное обеспечение.EasyGoTPM151_06 | Скачать | |
| Программное обеспечение.EasyGoTPM151_08 | Скачать | |
| Программное обеспечение.EasyGoTPM151_09 | Скачать | |
| Программное обеспечение.EasyGoTPM151_10 | Скачать | |
Программное обеспечение. Конфигуратор Конфигуратор | Скачать | |
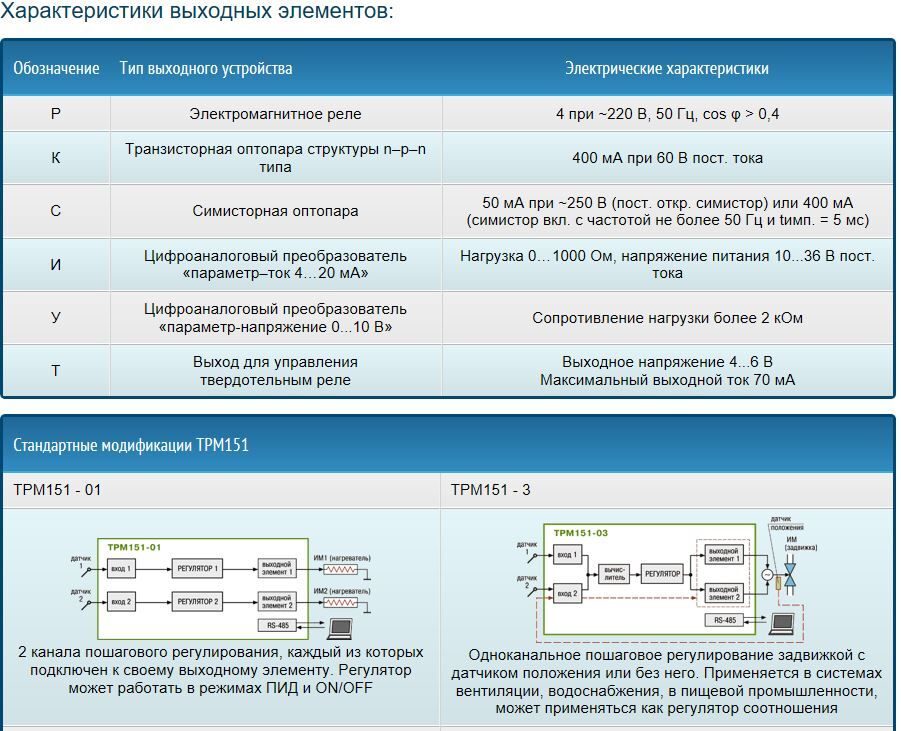
| Программное обеспечение.Модификации ТРМ151-01 | Скачать | |
| Программное обеспечение.Модификации ТРМ151-03 | Скачать | |
| Программное обеспечение.Модификации ТРМ151-04 | Скачать | |
| Программное обеспечение.Модификации ТРМ151-05 | Скачать | |
| Программное обеспечение.Модификации ТРМ151-06 | Скачать | |
Программное обеспечение. Модификации ТРМ151-08 Модификации ТРМ151-08 | Скачать | |
| Руководство по эксплуатации ТРМ151-01 | Скачать | |
| Руководство по эксплуатации ТРМ151-03 | Скачать | |
| Руководство по эксплуатации ТРМ151-04 | Скачать | |
| Руководство по эксплуатации ТРМ151-05 | Скачать | |
| Руководство по эксплуатации ТРМ151-06 | Скачать | |
| Руководство по эксплуатации ТРМ151-07 | Скачать | |
| Руководство по эксплуатации ТРМ151-08 | Скачать | |
| Руководство по эксплуатации ТРМ151-09 | Скачать | |
| Руководство по эксплуатации ТРМ151-10 | Скачать |
Регулятор температуры и влажности, программируемый по времени, ОВЕН МПР51 |
Условия эксплуатации
| Программный ПИД-регулятор ОВЕН ТРМ251 |
| Универсальный двухканальный программный ПИД-регулятор ОВЕН ТРМ151 |
|
 ..63 Гц
..63 Гц  ..120 с
..120 с ..80 %
..80 % ..245 В перем. тока
..245 В перем. токаПИД-регуляторы Метакон и ТРИД РТП от производителя
МЕТАКОН-6305 многофункциональный ПИД-регулятор с таймером выдержки
Многофункциональный специализированный ПИД-регулятор для управления температурно-временными режимами работы электротермического оборудования
Многофункциональный специализированный ПИД-регулятор для управления температурно-временными режимами работы электротермического оборудования по следующим алгоритмам:
— «Разогрев-Выдержка-Охлаждение»
— непрерывный режим управления температурой с отсчётом времени выдержки по таймеру и формированием сигнала готовности
Особенности МЕТАКОН-6305
- ПИД-регулятор с автонастройкой, управление мощностью либо ШИМ сигналом, либо аналоговым токовым сигналом
- Возможность ретрансляции измеренного сигнала токовым сигналом (функция нормирующего преобразователя)
- Сигнализатор (до 4 уровней)
- Три таймера:
— таймер пуска
— таймер выдержки
— таймер готовности - Управление работой контроллера температуры по 4 дискретным входам, с панели, по интерфейсу RS-485
- Программируемое назначение дискретных выходов (сигналы компараторов (сигнализация), таймеров, функциональная сигнализация)
- Встроенный источник питания 24 В для питания индикаторв, датчиков, исполнительных устройств, кнопок
- Логгер
- Счётчик моточасов
- Управление работой, настройка параметров и сбор данных по интерфейсу RS-485 с помощью технологии SetMaker
Функции МЕТАКОН-6305
- Программный выбор типа входного сигнала
- Линеаризация НСХ термопреобразователей, пирометров и ПМТ
- Масштабирование линейных сигналов
- Компенсация температуры холодного спая (может быть отключена пользователем)
- Коррекция результатов измерения путем смещения на фиксированную величину
- Извлечение квадратного корня из результата измерения
- Ретрансляция измеренных сигналов в унифицированный токовый сигнал (0…5, 0…20, 4…20) мА
- ПИД-регулирование с ШИМ-управлением и/или токовым выходным сигналом управления
- Позиционное регулирование
- Диагностика контура регулирования – функция LBA с ручным и автоматическим заданием параметров диагностики
- Формирование временной диаграммы «Разогрев-Выдержка-Охлаждение»
- Формирование сигналов трёх таймеров: пуска, выдержки, готовности
- Запуск прибора с задержкой по таймеру пуска
- Управление работой регулятора сигналами СТАРТ/СТОП, ПАУЗА, ТАЙМЕР, ПРЕДУСТАВКА по дискретным входам, с панели или по интерфейсу RS-485
- Сигнализация при достижении заданного уровня (16 функций, до 4 уровней)
- Сигнализация с функцией задержки срабатывания
- Сигнализация с функцией отложенного срабатывания при первом включении
- Переключение уставок на предуставки внешним дискретным сигналом
- Диагностика и сигнализация аварийных ситуаций
- Функция логгера – фиксация минимального и максимального значения
- Функция счетчика моточасов
- Встроенный источник питания 24 В
- Передача данных и управление по сети RS-485 с помощью технологии SetMaker
Общие сведения
- Высокая точность измерения и преобразования 0,1 %
- Высокая температурная стабильность (0,0025 % / градус)
- Гальваническая изоляция между собой входов, выходов, питания прибора, RS-485
- Активный выход тока (не требуется дополнительный источник питания)
- Одновременная индикация измеренного значения и уставок (или уровня сигнала управления, таймеров и других параметров) на двух 4-разрядных цифровых дисплеях
- Индивидуальная настройка состава оперативного меню
- Программная настройка (конфигурирование) прибора
- Ограничение доступа к конфигурированию с помощью пароля
- Высокая помехозащищённость – класс 3 критерий А
- Разъемные винтовые клеммы обеспечивают простой монтаж
- Диапазон рабочих температур (0…50) °С
- Диапазон напряжений питания ~(85…265) В
описание регулятора: k_m6305
Т-424 универсальный ПИД-регулятор
Многоканальное (до 4 каналов) измерение технологических параметров, ПИД-алгоритм регулирования с аналоговым и ШИМ выходными сигналами управления, функция регулятора отношений
ПИД-регулятор Т-424 представляет собой многофункциональный регулятор, используемый в самых различных отраслях промышленности для построения локальных систем измерения, контроля и регулирования температуры, давления и т. п.
п.
Регулятор Т-424 позволяет реализовать функцию регулятора отношений. Эта возможность прибора часто находит применение для управления газовыми горелками в котельных и печах, обеспечивая правильное соотношение газ-воздух.
ПИД-регулятор Т-424 зарегистрирован Госстандартом в Госреестре средств измерений под номером 16099-13.
Функции ПИД-регулятора Т-424
Многоканальное измерение технологических параметров (до 4 каналов)
ПИД-алгоритм регулирования с аналоговым и ШИМ выходными сигналами управления
Функция регулятора отношений
Масштабирование линейных сигналов, функция извлечения квадратного корня
Три независимых программируемых компаратора с выходом на реле
Преобразование измеренного сигнала в унифицированный токовый
Встроенный гальванически развязанный источник 24 В
Общие сведения
Высокая помехоустойчивость ПИД-регулятора (не ниже 3 степени жёсткости)
Ручное и автоматическое управление
Ограничение сигнала управления
Универсальный вход
Линеаризация НСХ термопреобразователей
4-проводная схема подключения термосопротивлений
Программный выбор типа НСХ термопреобразователя
Контроль обрыва входных линий и аварийных ситуаций
Контрастная цифровая индикация (антиблик)
Цифровая фильтрация входных сигналов
Гальваническая развязка входного и выходного сигналов
Контрастная цифровая индикация (антиблик)
Защита паролем
Органы управления и индикации
Структурная схема
Т-424-<1>-<2>-<3>
<1> Наличие токового выхода: |
| Пример обозначения при заказе: Т-424-1-100-200 – регулятор микропроцессорный универсальный Т-424, токовый выход присутствует. Примечания:
| |
1 – | Имеется | ||
<2> Тип термосопротивления: | |||
100 – | 100П, 100М | ||
50 – | 50П, 50М | ||
<3> Диапазон температур | |||
200 – | (-100…200) °С | ||
750 – | (-100…750) °С | ||
 Прибор рассчитан на работу с термопреобразователями сопротивления 100П и 100М. Диапазон температур термопреобразователя ТСП: (-100…200) °С.
Прибор рассчитан на работу с термопреобразователями сопротивления 100П и 100М. Диапазон температур термопреобразователя ТСП: (-100…200) °С.описание прибора: k_t-424
МЕТАКОН-515 быстродействующий универсальный ПИД-регулятор
Быстродействующий одноканальный ПИД-регулятор температуры и других технологических параметров с универсальным аналоговым и двумя дискретными входами, функцией извлечения квадратного корня
МЕТАКОН-515 – быстродействующий одноканальный ПИД-регулятор температуры и других технологических параметров с универсальным аналоговым и двумя дискретными входами, функцией извлечения квадратного корня.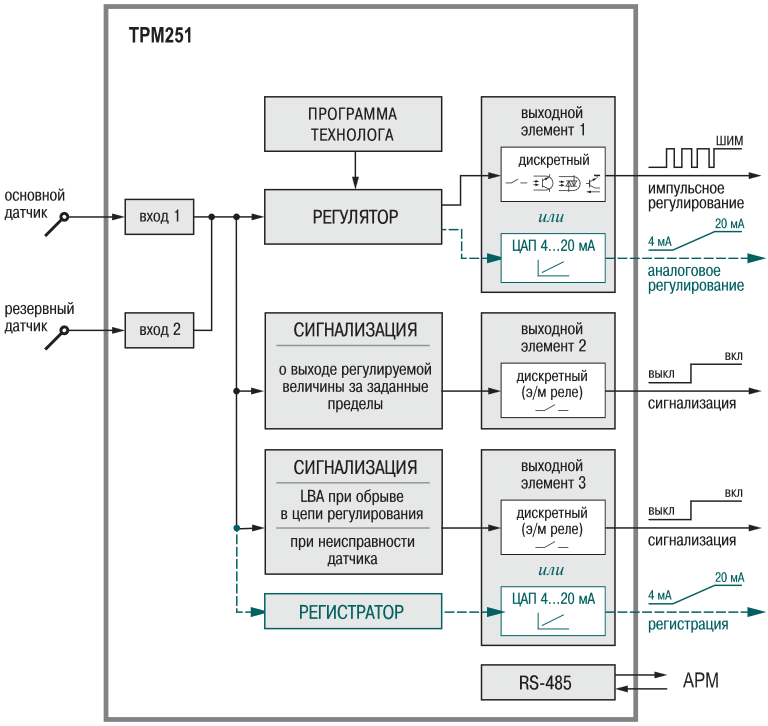 Токовые входной и управляющий сигналы, высокое быстродействие делают регулятор МЕТАКОН-515 наиболее подходящим для использования в химической промышленности, а также при управлении пневмопреобразователями, преобразователями частоты, регуляторами расхода и другими устройствами, рассчитанными на управление унифицированными сигналами.
Токовые входной и управляющий сигналы, высокое быстродействие делают регулятор МЕТАКОН-515 наиболее подходящим для использования в химической промышленности, а также при управлении пневмопреобразователями, преобразователями частоты, регуляторами расхода и другими устройствами, рассчитанными на управление унифицированными сигналами.
Два дискретных входа позволяют осуществлять внешнее управление его функционированием:
- пуск
- останов
- дистанционное переключение уставок ПИД-регулятора
Поддержка протокола RNet по сети RS-485 дает возможность использовать приборы МЕТАКОН-515 в SCADA-системах АСУТП при помощи OPC-сервера для регуляторов МЕТАКОН.
Тип средства измерений «Регуляторы микропроцессорные измерительные Метакон-515» утвержден Федеральным Агентством по Техническому регулированию и Метрологии и зарегистрирован в Госреестре средств измерений под номером 17977-09.
Функции ПИД-регулятора МЕТАКОН-515
- Измерение технологических параметров
- ПИД-регулирование температуры
- ПИД-алгоритм регулирования с аналоговым и ШИМ выходными сигналами управления
- Масштабирование линейных сигналов, функция извлечения квадратного корня
- Три независимых программируемых компаратора (по 8 функций) с выходом на реле
- Внешнее управление функционированием при помощи 2 дискретных входов
- Преобразование измеренного сигнала в унифицированный токовый
- Встроенный гальванически изолированный источник 24 В
Общие сведения
- Высокая помехоустойчивость прибора (не ниже 3 степени жёсткости)
- Ручное и автоматическое управление
- Ограничение сигнала управления
- Универсальный вход
- Линеаризация НСХ термопреобразователей
- 4-проводная схема подключения термосопротивлений
- Программный выбор типа НСХ термопреобразователя
- Контроль обрыва входных линий и аварийных ситуаций
- Контрастная цифровая индикация (антиблик)
- Цифровая фильтрация входных сигналов
- Гальваническая развязка входного и выходного сигналов
- Контрастная цифровая индикация (антиблик)
- Защита паролем
Структурная схема ПИД-регулятора температуры МЕТАКОН-515
описание прибора: k_m-515
МЕТАКОН-513/523/533 ПИД-регуляторы
Многоканальное (до 3 каналов) измерение технологических параметров, ПИД-алгоритм регулирования с ШИМ-сигналом управления на выходе, автоматическая настройка параметров ПИД-регулятора
ПИД-регуляторы МЕТАКОН-5×3 используются для управления устройствами однонаправленного действия: нагреватели типа ТЭН, компрессоры холодильников, и т. п. Применяются в случаях, когда точности позиционного регулирования недостаточно.
п. Применяются в случаях, когда точности позиционного регулирования недостаточно.
Источники сигналов: датчики температуры – термопары и термосопротивления, а также устройства с унифицированными сигналами тока или напряжения. На выходе – широтно-импульсно-модулированный (ШИМ) сигнал от реле или транзисторного ключа.
В состав серии МЕТАКОН-5×3 входят одно-, двух- и трёхканальные приборы.
В зависимости от модификации доступны четыре типа выхода: n-p-n транзистор с открытым коллектором, электромеханическое реле, оптосимистор для управления силовыми тиристорами и симисторами, транзисторный активный ключ для управления твердотельными реле.
Поддержка протокола RNet по сети RS-485 дает возможность использовать приборы МЕТАКОН в SCADA-системах АСУТП при помощи OPC-сервера для регуляторов МЕТАКОН.
Регуляторы выполнены на микропроцессорной основе, обладают высокой точностью измерения (класс точности 0.1), надёжны и просты в эксплуатации.
Функции
Многоканальное (до 3 каналов) измерение технологических параметров
ПИД-алгоритм регулирования с ШИМ-сигналом управления на выходе
Автоматическая настройка параметров ПИД-регулятора
Сигнализация по двум независимым уровням в каждом канале
Масштабирование линейных сигналов
Работа в распределённых системах сбора данных и управления
Общие сведения
Высокая помехоустойчивость прибора (не ниже 3 степени жёсткости)
Наличие модификаций с четырьмя типами выхода
Независимое конфигурирование всех каналов
Программный выбор типа НСХ термопреобразователя и автоматическая ее линеаризация
4-проводная схема подключения термосопротивлений
Контроль обрыва входных линий и аварийных ситуаций
Аппаратно-программная поддержка интерфейса RS-485
Контрастная цифровая индикация (антиблик)
Гальваническая развязка входного и выходного сигналов
Защита паролем
МЕТАКОН – 5<1><2>–<3>–<4>–<5>
<1> Количество каналов: |
| Пример обозначения при заказе: МЕТАКОН–533–T–0/5–1 – трёхканальный регулятор серии МЕТАКОН, выполняет функции ПИД-регулирования, выход выполнен на транзисторах с открытым коллектором, прибор рассчитан на работу с унифицированным входным токовым сигналом (0…5) мА, установлена программно-аппаратная поддержка интерфейса RS-485. Примечания:
| |
1 – | один канал | ||
2 – | два канала | ||
3 – | три канала | ||
<2> Алгоритм регулирования: | |||
3 – | ПИД-регулятор | ||
<3> Тип выходного сигнала: | |||
Т – | все выходы – транзисторы n-p-n с открытым коллектором | ||
Р – | все выходы – электромеханические реле | ||
КР – | выходы управления ▲ и ▼ – ключи для управления твердотельными реле, выходы Н, L и Авария – электромеханические реле | ||
<4> Тип входного сигнала: | |||
ТП – | ТП-термопары (ХА, ХК, НН, ПП, ПР, ВР(А-1), ЖК, градуировки ПМТ-2, Р-3, напряжение (0…50) мВ) | ||
0/5 – | ток (0…5) мА | ||
0/20 – | ток (0(4)…20) мА | ||
0/1 – | напряжение (0…1) В | ||
0/10 – | напряжение (0…10) В | ||
ТС100 – | термопреобразователи сопротивления 100П, 100М, Pt 100 | ||
ТС50 – | термопреобразователи сопротивления 50П, 50М, Pt 50 | ||

описание прибора: k_m-5×3
МЕТАКОН-613 программные ПИД-регуляторы
Управление устройствами однонаправленного действия: нагреватели типа ТЭН, компрессоры холодильников, и т. п. в соответствие с заложенной в память диаграммой, управление ещё тремя внешними дискретными устройствами в соответствие с программой
п. в соответствие с заложенной в память диаграммой, управление ещё тремя внешними дискретными устройствами в соответствие с программой
ПИД-регуляторы МЕТАКОН-613 используются для управления устройствами однонаправленного действия: нагреватели типа ТЭН, компрессоры холодильников и т.п., в соответствие с заложенной в память диаграммой. Кроме того, возможно управление еще тремя внешними дискретными устройствами в соответствие с программой.
Два дискретных входа позволяют осуществлять пуск и остановку приборов внешними сигналами.
Источники сигналов: датчики температуры – термопары и термосопротивления, а также устройства с унифицированными сигналами тока или напряжения. На выходе – широтно-импульсно-модулированный (ШИМ) сигнал от транзисторного ключа. При этом прибор может подавать команду как на нагрев, так и на охлаждение.
Три дискретных выхода позволяют управлять тремя дополнительными внешними устройствами в соответствие с командами, заложенными в память прибора. Компараторы могут работать как в следящем режиме, так и в фиксированном. Например, как это изображено на диаграмме.
Компараторы могут работать как в следящем режиме, так и в фиксированном. Например, как это изображено на диаграмме.
Функции ПИД-регулятора МЕТАКОН-613
- Библиотека программ: 10 временных диаграмм по 20 участков каждый.
- Измерение технологических параметров
- ПИД-алгоритм регулирования с ШИМ-сигналом управления на выходе
- Автоматическая настройка параметров ПИД-регулятора
- 2 независимых компаратора
- Масштабирование линейных сигналов
- Работа в распределённых системах сбора данных и управления
Общие сведения
- Высокая помехоустойчивость прибора (не ниже 3 степени жёсткости)
- Модификации с транзисторными выходами
- Независимое конфигурирование всех каналов
- Программный выбор типа НСХ термопреобразователя и автоматическая ее линеаризация
- 4-проводная схема подключения термосопротивлений
- Контроль обрыва входных линий и аварийных ситуаций
- Аппаратно-программная поддержка интерфейса RS-485
- Контрастная цифровая индикация (антиблик)
- Гальваническая развязка входного и выходного сигналов
- Защита паролем
Структурная схема
МЕТАКОН–61<1>–<2>–<3>–<4>
<1> Алгоритм регулирования: |
| Пример обозначения при заказе: МЕТАКОН-613-T-0/20-1 – регулятор серии МЕТАКОН-613, выход – транзисторы с открытым коллектором, выполняет функции ПИД-регулирования, рассчитан на работу с унифицированным входным токовым сигналом (0…20, 4…20) мА, установлена программно-аппаратная поддержка интерфейса RS-485. | |
3 – | ПИД-регулятор | ||
4 – | ПИД-регулятор для управления реверсивными исполнительными механизмами интегрирующего типа (ПДД-регулятор) | ||
|
| ||
<2> Тип выходного сигнала: | |||
Т – | транзисторы с открытым коллектором 24 В / 150 мА макс. (оптоизоляция, общий эмиттер) | ||
<3> Тип входного сигнала: | |||
ТП – | (0…50) мВ, термопары (ТХА(К), ТХК(L), ТПП(S), ТПР(B), ТВР(А-1), ТЖК(J), ТНН(N)), специальные градуировки (ПМТ-2, Р-3) | ||
ТС50 – | термосопротивления 50М, 50П, Pt50 | ||
ТС100 – | термосопротивления 100М, 100П, Pt100 | ||
0/20 – | ток (0(4)…20) мА | ||
<4> Наличие интерфейса RS-485: | |||
1 – | имеется | ||
0 – | отсутствует | ||

описание прибора: k_m-613-614
МЕТАКОН-614 программные ПИД-регуляторы
ПИД-регуляторы МЕТАКОН-614 используются для управления реверсивными исполнительными механизмами интегрирующего типа – МЭО, задвижки, заслонки, трехходовые клапаны и т. п. в соответствие с заложенной в память диаграммой. Кроме того, возможно управление еще тремя внешними дискретными устройствами в соответствие с программой.
п. в соответствие с заложенной в память диаграммой. Кроме того, возможно управление еще тремя внешними дискретными устройствами в соответствие с программой.
Два дискретных входа позволяют осуществлять пуск и остановку ПИД-регулятора внешними сигналами.
Источники сигналов: датчики температуры – термопары и термосопротивления, а также устройства с унифицированными сигналами тока или напряжения. На выходе – широтно-импульсно-модулированный (ШИМ) сигнал от транзисторного ключа. При этом прибор может подавать команду как на нагрев, так и на охлаждение.
Три дискретных выхода позволяют управлять тремя дополнительными внешними устройствами в соответствие с командами, заложенными в память ПИД-регулятора. Компараторы могут работать как в следящем режиме, так и в фиксированном.
Функции ПИД-регулятора МЕТАКОН-613
- Библиотека программ: 10 временных диаграмм по 20 участков каждый.
- Измерение технологических параметров
- ПИД-алгоритм регулирования с ШИМ-сигналом управления на выходе
- Автоматическая настройка параметров ПИД-регулятора
- 2 независимых компаратора
- Масштабирование линейных сигналов
- Работа в распределённых системах сбора данных и управления
Общие сведения
- Высокая помехоустойчивость прибора (не ниже 3 степени жёсткости)
- Модификации с транзисторными выходами
- Независимое конфигурирование всех каналов
- Программный выбор типа НСХ термопреобразователя и автоматическая ее линеаризация
- 4-проводная схема подключения термосопротивлений
- Контроль обрыва входных линий и аварийных ситуаций
- Аппаратно-программная поддержка интерфейса RS-485
- Контрастная цифровая индикация (антиблик)
- Гальваническая развязка входного и выходного сигналов
- Защита паролем
МЕТАКОН – 61<1>–<2>–<3>–<4>
<1> Алгоритм регулирования: |
| Пример обозначения при заказе: МЕТАКОН-614-T-0/20-1 – микропроцессорный регулятор серии МЕТАКОН-614, выход – транзисторы с открытым коллектором, выполняет функции ПИД-регулирования, рассчитан на работу с унифицированным входным токовым сигналом (0…20, 4…20) мА, установлена программно-аппаратная поддержка интерфейса RS-485. | |
3 – | ПИД-регулятор | ||
4 – | ПИД-регулятор для управления реверсивными исполнительными механизмами интегрирующего типа (ПДД-регулятор) | ||
<2> Тип выходного сигнала: | |||
Т – | Транзисторы с открытым коллектором 24В/150 мА маx (оптоизоляция, общий эмиттер) | ||
<3> Тип входного сигнала: | |||
ТП – | (0…50) мВ, термопары (ТХА(К), ТХК(L), ТПП(S), ТПР(B), ТВР(А-1), ТЖК(J), ТНН(N)), специальные градуировки (ПМТ-2, Р-3) | ||
ТС50 – | термосопротивления 50М, 50П, Pt50 | ||
ТС100 – | термосопротивления 100М, 100П, Pt100 | ||
0/20 – | ток (0(4)…20) мА | ||
<4> Наличие интерфейса RS-485: | |||
1 – | имеется | ||
0 – | отсутствует | ||
МЕТАКОН-4525 многоканальный ПИД-регулятор
Особенности
- Двухканальный ПИД-регулятор
- Двухканальный нормирующий преобразователь
- Сигнализатор (4 компаратора, 16 функций, до 4 независимых уровней)
- Разветвитель токовых сигналов «1 в 2»
- Управление работой и сбор данных по интерфейсу RS-485
- Настройка параметров по интерфейсу RS-485 с помощью технологии SetMaker
- Регулятор может использоваться как модуль УСО (устройство сопряжения с оборудованием) с 2 универсальными входами и 5 выходами разного типа
Функции
- Измерение унифицированных сигналов тока и напряжения, сигналов термопар, термопреобразователей сопротивления (универсальный измерительный вход)
- Программный выбор типа входного сигнала
- Линеаризация НСХ термопреобразователей
- Масштабирование линейных сигналов, коррекция показаний
- Компенсация температуры «холодного» спая ТЭП
- Извлечение квадратного корня из результата измерения (для унифицированных входных сигналов тока)
- Измерение влажности психрометрическим методом
- Преобразование входных сигналов в унифицированный токовый сигнал (4…20) мА
- ПИД-регулирование с токовым выходным сигналом управления и/или ШИМ
- Задание скорости изменения уставки
- Программное регулирование под управлением внешнего контроллера по интерфейсу RS-485 путем записи уставок по циклограмме
- Управление выходами прибора либо локально, либо по интерфейсу RS-485. Назначение дискретных выходов программируется пользователем
- Назначение выходного токового сигнала (задается пользователем):
- аналоговый выход ПИД-регулятора
- ретрансляция измеренного значения
- Сигнализация при помощи встроенных компараторов (до 4 уровней)
- Сигнализация с функцией задержки срабатывания
- Сигнализация с функцией отложенного срабатывания при первом включении
- Функция счётчика моточасов
- Диагностика и сигнализация аварийных ситуаций:
- обрыв и замыкание датчика
- выход параметра за пределы допустимого диапазона преобразования
- нарушение целостности параметров в энергонезависимой памяти
- обрыв датчика температуры «холодного спая»
- Встроенный гальванически развязанный источник питания 24 В
- Передача данных и управление по сети RS-485, протокол MODBUS RTU
- Настройка по интерфейсу RS-485 с помощью технологии SetMaker
 Назначение дискретных выходов программируется пользователем
Назначение дискретных выходов программируется пользователемОбщие сведения
- Высокая точность измерения и преобразования 0,1 %
- Высокая температурная стабильность (0,0025 % / градус)
- Гальваническая изоляция между собой входов, выходов, питания прибора, RS-485
- Одновременная индикация измеренного значения и уставок на двух 4-разрядных цифровых дисплеях
- Индивидуальная настройка состава оперативного меню
- Программная настройка (конфигурирование) прибора
- Ограничение доступа к конфигурированию с помощью пароля
- Высокая помехозащищённость – класс 3 критерий А
- Разъемные винтовые клеммы обеспечивают простой монтаж
- Диапазон рабочих температур (-10…70) °С
- Диапазон напряжений питания ~(155…265) В
Выходы
Название выхода | Тип выхода | Назначение | Характеристики |
Выходы 1–5 | АT – пассивный токовый, гальванически изолированный | Назначение программируется: | (4…20) мА |
Р – электромеханическое реле | Сигнал компаратора | 250 В, 3 А | |
T – оптотранзистор | 60 В, 150 мА | ||
DC 24 V | Источник питания | Питание нормирующих преобразователей, индикаторов, реле | 24 В, 200 мА макс. |
RS-485 | Интерфейс RS-485 | Передача данных по сети | 115,2 кбит/с макс. |

Тип выходов 1–5 в зависимости от модификации
Модификация | Выход 1 | Выход 2 | Выход 3 | Выход 4 | Выход 5 |
МЕТАКОН-4525-2Р/2Р/1Р | Реле | Реле | Реле | Реле | Реле |
МЕТАКОН-4525-2Т/2Р/1Р | Оптотранзистор | Реле | Оптотранзистор | Реле | Реле |
МЕТАКОН-4525-2АТ/2Р/1Р | Токовый | Реле | Токовый | Реле | Реле |
МЕТАКОН-4525-2АТ/2Т/1Р | Токовый | Оптотранзистор | Токовый | Оптотранзистор | Реле |
Регуляторы ТРИД РТП — ПИД-регуляторы
ПИД-регуляторы «Трид» предназначены для регулирования технологического параметра по пропорционально-интегрально-дифференциальному закону. Терморегуляторы данного типа обеспечивают более точное регулирование параметра, учитывая инерционность системы. Благодаря ряду настроек, регуляторы температуры автоматические серии РТП могут быть точно сконфигурированы для более эффективного выполнения конкретной задачи.
Терморегуляторы данного типа обеспечивают более точное регулирование параметра, учитывая инерционность системы. Благодаря ряду настроек, регуляторы температуры автоматические серии РТП могут быть точно сконфигурированы для более эффективного выполнения конкретной задачи.
ПИД-регуляторы широко используются для регулирования температуры при работе химического и нефтехимического оборудования, а также различных печей (литейные, сушильные, хлебопекарные и т.д.).
Технические характеристики:
Номинальное напряжение питания
~220 В, 50 Гц
Допустимое напряжение питания
от 187 до 242 В
Потребляемая мощность, не более
10 Вт
Класс точности
0,25
Диапазон измеряемых температур
от минус 270°С до + 2500°С
Разрешение по температуре
0,1 или 1°С
Интерфейс для связи с компьютером
RS485
Рабочий диапазон температур
от минус 20°С до +50°С
Относительная влажность воздуха
5…90%, без конденсации влаги
Материал корпуса
металл (дюраль)
Тип монтажа
щитовой
Габаритные размеры
96х96х110 мм
Типы выходных устройств Тип Р
электромагнитное реле 220 В/5 А
Типы выходных устройств Тип Т
транзисторный ключ 12…20 В, ток до 30 мА
Типы выходных устройств Тип А
аналоговый токовый выход 4-20 мА (0-20 мА, 0-5 мА)
Без интерфейса | С интерфейсом RS485 |
ТРИД РТП 112-1В1Т1Р | ТРИД РТП 112-1В1А2Р-485 |
ТРИД РТП 112-1В2Р | ТРИД РТП 112-1В1Т2Р-485 |
ТРИД РТП 122-2В2Р | ТРИД РТП 112-1В3Р-485 |
ТРИД РТП 322-2В2Р | ТРИД РТП 122-2В2А2Р-485 |
ТРИД РТП 332-1В2Р | ТРИД РТП122-2В2Т2Р-485 |
| ТРИД РТП 122-2В4Р-485 |
| ТРИД РТП 122-4В4Р-485 |
| ТРИД РТП 322-2В2А2Р-485 |
| ТРИД РТП 322-2В2Т2Р-485 |
| ТРИД РТП 322-2В4Р-485 |
| ТРИД РТП 332-1В1Т1Р-485 |
| ТРИД РТП 332-1В2Р-485 |
| ТРИД РТП 342-1В3Р-485 |
описание приборов: регуляторы РТП
Программные регуляторы — Элементы автоматики — Каталог статей
В некоторых случаях требуется управление процессом нагрева или охлаждения по программе, представляющей собой последовательность из нескольких шагов — ступеней. По подобной программе работают, например, варочные котлы в пищевой промышленности, пропарочные камеры на заводах ЖБИ, стенды сушки и нагрева ковшей на металлургических предприятиях и т.д.
По подобной программе работают, например, варочные котлы в пищевой промышленности, пропарочные камеры на заводах ЖБИ, стенды сушки и нагрева ковшей на металлургических предприятиях и т.д.
Один шаг многоступенчатой программы управления включает в себя две стадии:
- нагрев (или охлаждение) до заданной температуры в течение заданного времени;
- поддержание температуры на заданном уровне (уставке) в течение заданного времени выдержки.
Довольно часто многоступенчатый алгоритм работы реализуется с помощью обычных ПИД-регуляторов, у которых технологический персонал через заданное время вручную меняет значение уставки — значения температуры нагрева (охлаждения). Данный метод имеет ряд существенных недостатков:
- высокая вероятность несвоевременного изменения уставки или ввода неверного значения уставки;
- необходимость постоянного дежурства обученного персонала;
- отсутствует возможность управления длительностью перехода от одного шага программы к другому (длительность первой стадии шага программы).
Недостатками «ручного» многоступенчатого управления режимами нагрева являются сложность соблюдения температурного режима работы технологической установки, нарушение технологии производства и снижение качества продукции.
Применение ПЛК для управления многоступенчатыми температурными режимами работы технологических установок сопряжено с достаточно большими затратами на их приобретение, программирование и наладку, а также на последующее обслуживание систем на базе ПЛК, если в штате предприятия нет соответствующих специалистов.
Для реализации многоступенчатых режимов управления существует специальный класс оборудования — программные регуляторы (программные задатчики). Программные задатчики осуществляют управление режимом нагрева (охлаждения) по ПИ или ПИД закону по заранее введенным многоступенчатым программам. Переход с одного шага на другой осуществляется в автоматическом режиме. Время перехода со ступени на ступень, длительность ступени и величина уставки температуры на каждой ступени определяется введенной программой. Ввод программы управления не требует знания языков программирования.
Ввод программы управления не требует знания языков программирования.
В зависимости от модели программного регулятора персонал имеет возможность быстро переключаться с одной программы нагрева на другую, осуществлять временный останов выполнения программы, принудительно завершать выполнение программы, изменять временные параметры ступеней и уставки температуры и др.
Программные регуляторы кроме дискретных и аналоговых выходов для управления исполнительными механизмами могут иметь дополнительные дискретные выходы для управления внешними устройствами (например, светозвуковой сигнализацией) и цифровые интерфейсы для передачи данных на верхний уровень АСУТП или технологический компьютер. Кроме того, информация о параметрах выполняемого шага программы выводится на дисплей программного задатчика, что позволяет получить полную информацию о ходе технологического процесса.
К недостаткам программных регуляторов можно отнести их все же ограниченную функциональность. Например, если на каждом шаге программы необходимо параллельно управлять большим количеством дополнительного оборудования (исполнительными механизмами, клапанами, сигнальными устройствами и т.п.), то реализовывать такой сложный алгоритм управления возможно только с помощью ПЛК.
Популярные модели программных регуляторов (задатчиков) отечественного производства:
- Овен ТРМ151 и ТРМ251;
- ТРИД РТМ 500;
- КонтрАвт Метакон-613 и Метакон-614;
- Термодат 14Е5, 16Е5, 17Е5, 18Е4, 18Е5, 19Е4, 19Е5, 25Е5, 29Е4, 29Е5.
Термодат-25Е5, Многоканальный программный ПИД-регулятор температуры
Многоканальный программный ПИД-регулятор температуры и электронный самописец с графическим дисплеем Термодат-25Е5 предназначен для подключения термопар или термосопротивлений, а также датчиков с токовым выходом. Прибор имеет от 8 до 12 универсальных входов. С помощью прибора Термодат-15Е5 можно управлять как нагревателем, так и охладителем. Интуитивно понятное управление обеспечивается 4 кнопками внизу экрана.
Интуитивно понятное управление обеспечивается 4 кнопками внизу экрана.
Основные особенности:
- ПИД-регулятор температуры
- Управление по программе
- Электронный самописец
- График температуры отображается на дисплее
- 8 — 12 входных каналов (универсальные входы)
- 8 — 12 основных выходов для управления нагревателем или охладителем (реле, симисторный или транзисторный)
- 8 — 12 аварийных реле
- 2 дополнительных аварийных реле на основном блоке
- 2 блока
- Энергонезависимая память 2 Мбайта
- Интерфейс для связи с компьютером RS485
- Гарантия 3 года
| Параметр | Значение |
| Входы | 8 или 12 универсальных |
| Выходы | 8 или 16 реле ~7 А, 250 В, 2 аварийных реле, 8 или 12 симисторных, 8 или 12 транзисторных, 8 или 12 аналоговых |
| Закон регулирования | ПИД, двухпозиционный, регулирование по программе, трехпозиционный (не все модели) |
| Диапазон температур измерения | −270. ..2500°С (зависит от типа датчика) ..2500°С (зависит от типа датчика) |
| Напряжение питания | Номинальное ~220 В, допустимое ~160…250 В |
| Потребляемая мощность | ≤ 20 Вт |
| Корпус | Металлический блок индикации и управления. Пластмассовый блок измерения и выходов с креплением на DIN-рейку |
| Дисплей | Графический жидкокристаллический экран 67×33мм, разрешение 128×64 точек |
| Условия эксплуатации | 5…45ºС 5…70%RH |
| Монтаж | В щит или на DIN-рейку (стандарт 19S) |
| Габаритные размеры | 96×96×95 мм (основной блок) 140×340×92 мм (периферийный блок) |
| Вес | ≤ 2,2 кг |
| Габаритные размеры |
| Основной блок |
| Периферийный блок |
ПИД-тюнер | БЕСПЛАТНОЕ ПО
Легко настройте интегральный пропорциональный и дифференциальный коэффициенты ПИД-регулятора.
Оптимальные коэффициенты усиления ПИД-регулятора получаются автоматически.
Коэффициенты усиления ПИД-регулятора оптимизированы для вашей установки.
Настройка ПИД-регулятора превосходит метод Циглера-Николса.
Настройка ПИД-регулятора
совершенно бесплатна.
Используйте это бесплатное программное обеспечение для настройки ПИД-регулятора для импорта ваших данных,
визуализировать данные в виде графиков, получить точную модель технологической системы
и бесплатный алгоритм настройки усиления pid для получения оптимального усиления pid
для вашей заводской системы.
ПИД-регулятор: Пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор или трехчленный регулятор) представляет собой механизм обратной связи контура управления, широко используемый в промышленных системах управления и множестве других приложений, требующих непрерывного модулируемого управления.
Применение ПИД-регулятора: Пропорционально-интегрально-дифференциальные (ПИД) контроллеры сегодня используются в большинстве приложений автоматического управления технологическими процессами в промышленности для регулирования расхода, температуры, давления, уровня и многих других переменных промышленных процессов. Программное обеспечение pid-контроллера: большинство современных промышленных предприятий больше не настраивают контуры с помощью методов ручного расчета, показанных выше. Вместо этого для обеспечения стабильных результатов используется программное обеспечение для настройки ПИД-регулятора и оптимизации контура. Эти программные пакеты соберут данные, разработают модели процессов и предложат оптимальную настройку.
бесплатный pid-контроллер: бесплатное программное обеспечение для автоматической настройки pid с открытым исходным кодом для вашего проекта управления. Позволяет получить передаточную функцию контура управления и соответственно оптимизировать параметры ПИД-регулятора.бесплатный контроллер PID Tuner: это программное обеспечение PID Tuner позволяет выполнять автоматическую интерактивную настройку PID-регуляторов на основе экспериментальных данных.
бесплатная настройка контура pid: система контура управления состоит из трех компонентов: объекта (или системы) для управления, алгоритма контроллера и механизма обратной связи.
Загрузка pid-контроллера: вам не нужно загружать примеры или код настройки ПИД-регулятора, потому что вы можете бесплатно выполнять интерактивную настройку ПИД-регулятора онлайн с помощью этого программного обеспечения.
pid control: это самый популярный алгоритм управления в промышленности, мужественный, потому что он прост, надежен и обладает высокой производительностью в широком диапазоне условий эксплуатации.pid control: используйте бесплатное программное обеспечение для настройки pid и получите помощь на нашем форуме на «Справочном форуме».
Программное обеспечение для настройки ПИД-регулятора: самый простой способ настроить ПИД-регулятор — это использовать программное обеспечение для настройки ПИД-регулятора, которое упрощает процесс улучшения контуров обратной связи.
решение для настройки pid: PID Tuner — это решение, упрощающее процесс настройки нескольких отдельных контуров за счет получения коэффициентов усиления PID, которые увеличивают полосу пропускания и уменьшают колебания.
приложение для настройки pid: Приложение PID Tuner позволяет вам достичь желаемой производительности и требований к дизайну, будучи совершенно бесплатным.ПИД-управление: С контуром управления с обратной связью ПИД-регулятор корректирует ошибки между переменными процесса и желаемой уставкой.
Дрон: Настройте PID-контроллер тангажа, крена, челюсти для вашего квадрокоптера.
управление технологическим процессом: настройте ПИД-регулятор технологического процесса для оптимизации производительности предприятия, минимизации ошибок и максимального увеличения производительности.
Этот веб-сайт использует материал из статьи Википедии «PID_controller», которая выпущена в соответствии с лицензией Creative Commons Attribution-Share-Alike License 3.0.
ПИД-тюнер LinkedIn
Твиттер ПИД-тюнера
ПИД-тюнер Reddit
PID-тюнер Github
PID Tuner HackerNews
PID-тюнер Patreon
Почта ПИД-тюнера
ПИД-тюнер Teespring
Узнайте, как работает ПИД-регулятор — руководство по настройке ПИД-регулятора
При дифференциальном воздействии выход контроллера пропорционален скорости изменения измерения или ошибки. Выход контроллера рассчитывается по скорости изменения измерения во времени.
Выход контроллера рассчитывается по скорости изменения измерения во времени.
ВЫХОД КОНТРОЛЛЕРА = ПРОИЗВОДНАЯ (dm)/(dt)
Где м это измерение в момент времени t .
Некоторые производители используют термин скорость или предварительное действие вместо производного. Производная, скорость и предварительный акт — это одно и то же.
ПРОИЗВОДНАЯ = СТАВКА = ПРЕДДЕЙСТВИЕ
Производное действие может компенсировать изменение измерения. Таким образом, производная действует для предотвращения более быстрых изменений измерения, чем пропорциональное действие.Когда происходит изменение нагрузки или уставки, действие производной заставляет коэффициент усиления контроллера перемещаться в «неправильном» направлении, когда измерение приближается к уставке. Производная часто используется, чтобы избежать перерегулирования.
Производное действие может стабилизировать контуры, поскольку добавляет опережение по фазе. Как правило, если вы используете производное действие, можно использовать большее усиление и сброс контроллера.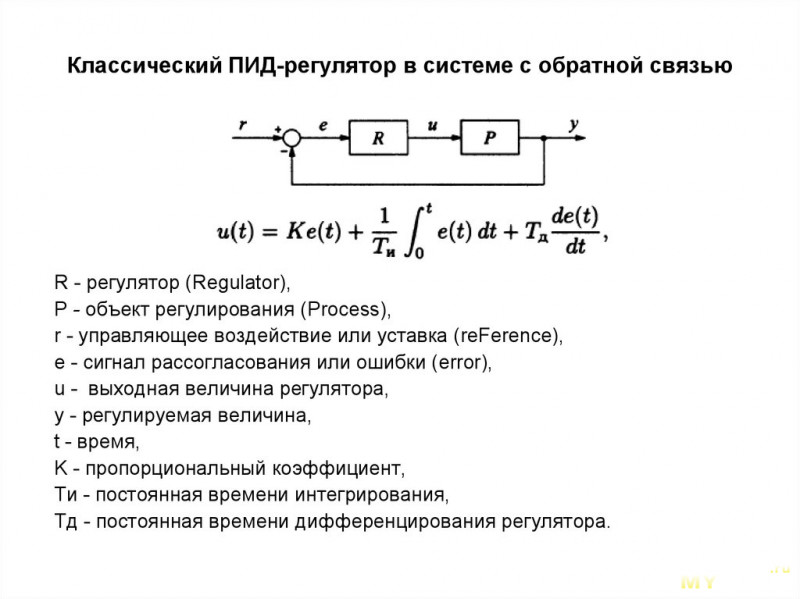
При использовании ПИД-регулятора отношение амплитуд теперь имеет провал вблизи центра частотной характеристики. Интегральное действие дает контроллеру высокое усиление на низких частотах, а дифференциальное действие заставляет усиление начинать расти после «провала».На более высоких частотах фильтр по производной ограничивает действие по производной. На очень высоких частотах (выше 314 радиан/время; частота Найквиста) соотношение фазы и амплитуды контроллера увеличивается и уменьшается совсем немного из-за дискретной выборки. Если бы в контроллере не было фильтра, отношение амплитуд контроллера неуклонно возрастало бы на высоких частотах вплоть до частоты Найквиста (1/2 частоты дискретизации). Фаза контроллера теперь имеет горб из-за действия производного опережения и фильтрации.(Изображение предоставлено ExperTune Loop Simulator.)
Временная характеристика менее колебательна, чем при использовании ПИ-регулятора. Производное действие помогло стабилизировать петлю.
Настройка ПИД-регулятора | Программное обеспечение для настройки контура ПИД-регулятора
Финн Пикок Инженер-электрик
Уважаемый технический специалист,
Вы рвете на себе волосы от разочарования, пытаясь настроить ПИД-контур методом проб и ошибок?
Открою вам секрет: специалисты по настройке ПИД-регуляторов имеют специальное название для этого метода «проб и ошибок».
Они называют это «методом WAG «.
То есть W ild A ssed G uess. Потому что, если за вашей настройкой нет науки или методологии, то вероятность того, что вы наткнетесь на точную комбинацию усилений P, I и D, которая обеспечит самый быстрый и стабильный отклик, приблизительно равна нулю.
Вы уже пробовали печально известную технику Циглера-Николса? Вы знаете один — он заставляет вас отправить вашу систему в нестабильную состояние, прежде чем предлагать константы настройки, которые оставляют вашу петлю всегда балансирующей на нестабильности.
Как получается, что метод, изобретенный в 1940-х годах, который редко работает за пределами лаборатории (с ее стерильными, идеальными условиями), до сих пор торгуется почти всеми в отрасли как способ настройки ПИД-контура?
Как у тебя дела с исчислением в эти дни?
Вам надоели веб-сайты и учебники, полные подобных уравнений??
Правда в том, что вам не нужно разбираться в теории управления или уравнениях, подобных тому зловещему виду выше, чтобы успешно настроить большинство ПИД-контуров.
Вам не нужно перелистывать страницы сухих учебников, пытаясь отделить академическую теорию от практических методов, которые вы можете использовать в реальном мире.
Меня зовут Финн Пикок, я дипломированный профессиональный инженер, и я занимаюсь разработкой систем управления более 12 лет…
После 12 лет дорогостоящих проб и ошибок, вот что я обнаружил
- Я понял, что жизнь слишком коротка, чтобы тратить дни (и ночи) на настройку ПИД-регуляторов, используя бесконечный цикл проб и ошибок.
- Я узнал, что Ziegler Nichols — пустая трата времени на что угодно, только не на самый учебник процессов.
- Я узнал, что если у вас есть 10 000 долларов, чтобы потратить их, то есть отличные программные пакеты, которые действительно работают очень хорошо. (напишите мне, если хотите узнать, какой из них работает лучше всего)
- Я также узнал, что если у вас нет 10 тысяч долларов, чтобы прожечь дыру в кармане, вы все равно можете красиво настроить свои петли, но вам нужно следовать очень специфическому процессу.
Как ни странно, я никогда не видел этого полного процесса настройки ПИД-регулятора ни в одном учебнике или на любом веб-сайте. Это позор, потому что эти правила настройки дадут вам быструю, надежно настроенную петлю с минимальным перерегулированием.
Вы хотите увидеть формулы, которые я рекомендую для настройки PID?
Я хочу быть с вами полностью откровенным. Хотя вы не найдете моего полного, пошагового, раскрашивания по номерам в учебниках, если у вас есть терпение и вы можете расшифровать высоко академический стиль письма, вы можете откопать формулы, которые я использую для рассчитать константы настройки.
На самом деле я даже укажу вам их местонахождение. Просто имейте в виду, что применение этих формул составляет только 10% чертежа. Остальная часть содержит практические и важные шаги, которые вам необходимо выполнить, прежде чем вы даже начнете думать о вычислении констант настройки.
Используемые формулы взяты из интегральных критериев и метода настройки лямбда и минимизируют интеграл абсолютной погрешности (не волнуйтесь, я использую простой английский в чертеже).
Вы можете найти их в следующих учебниках (первый 2000 страниц, но вы хотите прочитать страницу 422!):
Техника, о которой я говорю, — это техника, которую я собрал из множества разных источников за 12 лет работы инженером по системам управления, работая с одними из лучших инженеров по системам управления в мире.Я использовал ту же технику для настройки циклов от атомных электростанций до шоколадных фабрик.
Наконец-то я нашел время сесть и зафиксировать каждую деталь этого проверенного метода в одном простом в использовании справочнике. Я назвал это:
Я назвал это:
Проверено для настройки
- Контроль температуры
- Управление потоком
- Регулятор давления
- Контроль уровня
- pH-контроль
- Регулятор скорости
- Сервоуправление
- Каскадные петли
и многое другое
Я собрал 12-летний практический опыт настройки ПИД-регулятора и поместил его в план настройки ПИД-регулятора.Я проведу вас через все методы, принципы и с трудом заработанные практические идеи моего 12-летнего путешествия на простом английском и простым пошаговым способом.
Как высококвалифицированный профессионал, у вас есть миллион и одна вещь, требующая вашего внимания. Не тратьте свое драгоценное время, пытаясь собрать воедино всю картину о настройке PID, поскольку я могу предоставить вам всю необходимую информацию прямо сейчас.
Что говорят люди
«Спасибо! То, что вы здесь делаете, прекрасно.Нам нужно больше таких людей, как вы, в других областях инженерного обучения и развития.
Джон Бартлет
Остин, Техас
 »
»«Финн, я только что закончил настройку контура ПИД-регулятора для промышленной холодильной установки (аммиак) и должен был написать вам короткую заметку, чтобы сказать, насколько я был впечатлен вашим планом настройки.
Я выполнил ваши шаги для процесса интегрирования и использовал предоставленные уравнения и ВАУ! какой результат.
Это должно быть ЛУЧШЕЕ руководство по настройке. Мне еще предстоит найти более простой способ калибровки и настройки контура.
Пол Эллис
Менеджер группы электриков
Versacold Logistics
Мельбурн, Австралия
http://www.versacold.com.au
«Прост в использовании и использовании. Вероятно, это лучший практичный материал для настройки ФИД, который я когда-либо видел.
Действительно,.. Это Idiot Proof. Как будто вы следуете линиям, нарисованным на полу, и вы благополучно доберетесь до места.
Используя ваш план, мой процесс был настроен только с PI. PID не был нужен после того, как он был так хорошо настроен.»
Франсиско Лопес
Advanced Integrated Solutions Inc
США

«У нас была установлена новая система управления с 3 клапанами с новыми контурами регулирования.
Мы сделали все 3 по вашему чертежу, и все они стабильны во всем рабочем диапазоне.»
Майкл Фиес,
Калифорния, США
«Я должен сказать, что литература, которую вы предоставляете, фантастична и упрощает весь смысл управления.
В книге дается очень структурированный метод настройки петель, в то время как в другой литературе сохраняется сложность.
Серьезно, я считаю, что направление, в котором вы движетесь, и информация/инструкции, которые вы уже дали, не имеют себе равных…»
Пол Маклин
Манчестер, Великобритания
«Я должен сказать, что литература, которую вы предоставляете, фантастична и упрощает весь смысл управления.
В книге дается очень структурированный метод настройки петель, в то время как в другой литературе сохраняется сложность.
Серьезно, я считаю, что направление, в котором вы движетесь, и информация/инструкции, которые вы уже дали, не имеют себе равных…»
Пол Маклин
Манчестер, Великобритания

«Большое спасибо. Это лучшее, что я когда-либо делал, чтобы улучшить свою работу и остаться на ней.»
Чарльз Аттерберри
США
Вот пример того, что PID Tuning Blueprint может сделать для ВАС…
Сэкономьте себе сотни часов, получив немедленный план успешной настройки ПИД-регулятора
- Настройте свою петлю сегодня — Blueprint сразу переходит к делу, не отвлекая вас, так что вы сможете максимально повысить производительность вашего процесса как можно скорее
- Дает вам надежную петлю — это означает, что вы можете быть спокойны, зная, что она будет оставаться настроенной в течение длительного времени
- Забудьте о пробах и ошибках — этот метод даст вам лучшие настройки с первого раза и каждый раз.
- Этот метод автоматически идентифицирует любые неприятные характеристики цикла, такие как временные задержки и лаги, и предоставляет константы настройки, которые будут с ними справляться.
- Не требуется дорогостоящее оборудование — все, что вам нужно, это данные процесса и электронная таблица
- Определите проблемы с вашим процессом, которые не имеют ничего общего с настройкой (они невероятно распространены)
- Вы изучаете методы, на изучение которых у меня ушло 12 лет, но вы можете начать использовать их через 10 минут

Вот чего не сделает PID Tuning Blueprint:
- ЭТО НЕ БУДЕТ…
Оставьте вам процесс, который всегда балансирует на грани нестабильности
- ЭТО НЕ БУДЕТ…
Оставить вас с необработанными константами настройки и без средств их преобразования в конкретные единицы и алгоритм ПИД вашего конкретного контроллера
- ЭТО НЕ. ..
Ожидайте, что у вас будет докторская степень по математике , чтобы понять это
- ЭТО НЕ БУДЕТ…
Программное обеспечение для настройки ФИД обойдется вам в 10 000–30 000 долларов
 ..
.. Что в коробке?
Так что же на самом деле включает в себя пакет PID Tuning Blueprint?
Существует четыре версии этого многофункционального инструментария:
1) Digital Basic Все, что вам нужно для настройки процесса сегодня — полный курс в формате PDF, а также журнал настройки ФИД и памятка по настройке ФИД (все как описано ниже).ПЛЮС вы получаете 3 бонуса быстрого действия: «Руководство идиота по алгоритму ПИД», Полное руководство по каскадному управлению и Линеаризатор процесса для MS Excel.
2) Pro Package Полный чертеж в формате PDF со всеми дополнительными функциями, указанными выше, а также мой полнофункциональный «Имитатор настройки ПИД-регулятора и калькулятор констант настройки» для MS Excel.
Это программное обеспечение для настройки ПИД-регуляторов , написанное в MS Excel, которое значительно ускоряет процесс настройки и позволяет изучить приемы, описанные в схеме, на моделировании вашего процесса.Совершайте любые ошибки новичка в Excel — не на своей установке, и будьте уверены в своей настройке, прежде чем зафиксировать новые параметры в своем контроллере.
3) Deluxe Все, о чем я только что рассказал вам выше, за исключением того, что все книги поставляются вам в виде печатных копий, а все программное обеспечение поставляется на компакт-дисках. Кроме того, вы получаете мгновенную загрузку Blueprint, бонусов и программного обеспечения.
4) Лицензия на объект . Лицензия на весь сайт (до 20 пользователей) для вашего сайта, так что каждый инженер и технический специалист может иметь свою собственную копию чертежных материалов и программного обеспечения, включая PID Tuning Simulator / Tuning Calculator. Плюс 3 печатных копии каждой из книг и программное обеспечение на компакт-диске.
Плюс 3 печатных копии каждой из книг и программное обеспечение на компакт-диске.
Вот каждая часть упаковки более подробно:
I. Схема настройки ПИД-регулятора: руководство
Вы получите это пошаговое руководство, объясняющее мой уникальный метод настройки ПИД-регулятора и способы его применения в вашем конкретном процессе. Не ждите здесь романа о Гарри Поттере! Это 65 страниц, заполненных только тем, что вам нужно знать, так что вам не потребуется больше часа, чтобы разобраться.Вы можете приступить к выполнению шагов немедленно.
II. Памятка по настройке ПИД-регулятора
После того, как вы использовали Blueprint для настройки своего первого цикла, вы можете перейти к использованию этой двусторонней шпаргалки для быстрой настройки последующих циклов. Шпаргалка представляет собой очень сжатое руководство по процессу настройки, к которому вы можете легко обратиться на заводе, чтобы убедиться, что ваши петли настроены максимально эффективно.
III. Журнал настройки ПИД-регулятора
Вас спросят, как вам удалось так хорошо работать с этим процессом. И если вы будете заполнять пробелы в новой копии этого журнала по мере настройки каждого контура, у вас будет запись, которая точно покажет, что вы сделали для улучшения процесса, и, что особенно важно, насколько вы его улучшили (всегда полезно, когда переговоры о вашей следующей ставке или повышении заработной платы!)

Симулятор настройки ПИД-регулятора и калькулятор настройки для MS Excel (только пакет Pro)
Лучшими настройщиками ПИД-регуляторов в бизнесе являются те, кто апробирует свои недавно рассчитанные параметры настройки в моделировании, «соответствующем назначению», прежде чем инвестировать усилия и время простоя, необходимые для их реализации в их физическом процессе.
Эта сложная электронная таблица фактически моделирует ваш процесс и контроллер прямо в знакомой среде MS Excel. Вот как это вписывается в процесс настройки контура ПИД-регулятора:
a) Вы выполняете шаги 1-7 в соответствии с планом (несмотря на то, что некоторые поставщики программного обеспечения могут заявлять, что эти важные шаги не могут быть автоматизированы).
b) Вы просматриваете каждую настраиваемую ячейку на основном рабочем листе и набираете свой процесс, контроллер и желаемые характеристики производительности.
c) Алгоритмы электронной таблицы автоматически вычисляют оптимальные константы настройки (используя точно такие же правила, как описано в Blueprint). Электронная таблица также автоматизирует процесс преобразования необработанных констант настройки в значения, которые может использовать ваш конкретный тип контроллера.
d) Симулятор показывает, как смоделированный процесс будет реагировать на эти параметры настройки на основе заданного значения и/или изменения нагрузки
e) Вы замечаете любые ошибки в настройке задолго до того, как прикоснетесь к растению, и обретаете уверенность в технике настройки, которую вы только что изучили.
Это также отличный обучающий инструмент для игры с настройкой контроллера и наблюдения за тем, как различные параметры влияют на производительность процесса.
Я написал это в Excel, чтобы у вас был полный доступ ко всем алгоритмам, управляющим моделированием ПИД-регулятора и настройкой. Я ненавижу «черные ящики» так же сильно, как любой другой инженер. Если вы хотите точно понять, почему что-то происходит в симуляции или калькуляторе, просто снимите защиту с листа (пароль не требуется), и вы увидите работу.
Схема настройки ПИД-регулятора
Я немного отличаюсь от большинства поставщиков программного обеспечения/обучения для настройки ПИД-регуляторов…
Я не трачу свое время, отвечая на запросы о предложениях, совершая торговые визиты или развозя одетых в костюмах продавцов по всему миру, уговаривая высшее руководство тратить много денег…
Это означает, что мне не нужно брать пятизначную сумму за лицензию. На самом деле, вы можете получить все инструменты, необходимые для настройки контура ПИД-регулирования уже сегодня, всего по адресу:
.
Что еще можно купить за 97 долларов в области промышленной автоматизации в 2022 году?
Упаковка из 500 наконечников?
«Но подождите, это еще не все!»
Закажите сейчас, и я дам вам следующий бонусный пакет FAST ACTION
1
БОНУС БЫСТРОГО ДЕЙСТВИЯ
#1
Полное руководство идиота по алгоритму PID
Вам не нужно понимать, почему работает ПИД-алгоритм или вычисления, которые лежат в его основе, чтобы настроить большинство контуров на практике, но если вы похожи на любого инженера, которого я знаю, вы не будете чувствовать себя комфортно, если у вас нет интуитивного понимания что происходит и почему. …
…
Это руководство по алгоритму PID и лежащим в его основе математическим концепциям написано таким образом, чтобы каждый мог получить интуитивное представление о том, как работает алгоритм и почему.
Этот ускоренный курс использует аналогию с автомобилем на автостраде, меняющем полосу движения, чтобы представить процесс под контролем, и проводит вас через легко визуализируемые «мысленные эксперименты», чтобы закрепить концепции в вашем уме.
Если Интегралы, Дифференциалы и внутренняя работа алгоритма PID являются для вас загадкой — это «Руководство для идиотов» даст вам A-HA! момент, когда все, наконец, имеет смысл
Отзыв для руководства идиота
«Поскольку я новичок в этой области управления технологическими процессами, я был очень рад получить ОЧЕНЬ понятное объяснение ПИД-регулятора (если вы знаете, почему, как это происходит легко)
Теперь даже я могу объяснить это другим.Отличная работа!!!»
Джеймс Грир
Experitec Inc
Канзас, США«Меня впечатлило то, как «Руководство для идиотов» объяснило всю математику, лежащую в основе пропорциональных, интегральных и производных величин, доступным языком, чтобы операторы, инженеры, электрики и механики могли лучше понять ПИД-регулирование.
Операторы и стационарные инженеры на моем заводе были очень благодарны за то, что я позволил им прочитать «Руководство для идиотов», потому что теперь они могли лучше понимать процессы.
Мне также понравилось, как он построил каждый из трех компонентов, начиная с пропорционального, затем добавляя интеграл и, наконец, добавляя производную.
Это практическое объяснение помогло мне лучше понять ПИД-регулирование за два часа, чем я научился на трехмесячных теоретических курсах, которые я проходил в прошлом».
Терри Кинг
Gay Lea Foods
Онтарио, Канада

Получите «Полное руководство идиота по алгоритму PID» сегодня вместе с заказом схемы настройки PID.
Нажмите здесь, чтобы заказать
2
БОНУС БЫСТРОГО ДЕЙСТВИЯ
#2
Линеаризатор для автоматизированного процесса для MS Excel
Важным шагом любого процесса настройки является обеспечение того, чтобы ваш процесс линейно реагировал на выходной сигнал ПИД-регулятора (см. раздел 8 Руководства по схемам).
раздел 8 Руководства по схемам).
Этот макрос автоматизирует процесс линеаризации. Вы просто вставляете свои данные процесса, и макрос создает таблицу поиска, которую вы можете использовать в своем контроллере, чтобы значительно улучшить производительность вашего цикла.
Получите Полное руководство по каскадному управлению сегодня вместе с заказом схемы настройки ПИД-регулятора.
Нажмите здесь, чтобы заказать
3
БОНУС БЫСТРОГО ДЕЙСТВИЯ
#3
Каскадное управление: подробное руководство
Возможно, вам хорошо известно, что каскадное управление является одной из наиболее популярных «продвинутых» стратегий ПИД-регулирования.Вы также можете знать, что это включает в себя вставку выхода одного контроллера непосредственно во вход второго контроллера (ой!).
Но вы действительно понимаете, почему используется каскадное управление, когда оно улучшает производительность контура, а когда убивает его? Вам нужно подробное пошаговое руководство, в котором показано, как оценивать, проектировать, настраивать и эксплуатировать каскадную систему управления?
В этом подробном руководстве по каскадному управлению рассказывается все, что вам нужно знать о каскадном управлении, чтобы вы знали, когда его использовать и как его настраивать. Это 25 страниц одних только фактов с большим количеством диаграмм и примеров, чем вы можете потрясти.
Это 25 страниц одних только фактов с большим количеством диаграмм и примеров, чем вы можете потрясти.
Получите Полное руководство по каскадному управлению сегодня вместе с заказом схемы настройки ПИД-регулятора.
Нажмите здесь, чтобы заказать
Мое 12-летнее образование принадлежит вам без риска
Это мое обещание тебе
У меня есть для вас очень простое обещание.Если план настройки PID не соответствует тому, что я сказал, я хочу, чтобы вы запросили полный и полный возврат средств.
У вас есть 60 дней, чтобы подумать об этом, поэкспериментировать с ним, извлечь из него уроки и улучшить с его помощью свои процессы. Это должно дать вам достаточно времени, чтобы так или иначе узнать, что Blueprint является важнейшим инструментом, который повышает эффективность управления вашим процессом.
Если вам это не нравится или работает не так хорошо, как я описал, вы получите свои деньги обратно.
Все просто.
Гарантировано.
Моя 60-дневная безусловная гарантия возврата денег
Я настолько уверен, что этот пакет сделает вас ниндзя настройки PID, что я даю 60-дневную 100% гарантию качества.
Если вы каким-либо образом не удовлетворены им (даже если вам не нравится цвет обложки!), просто напишите мне по электронной почте в течение 60 дней и дайте мне знать.Я выдам быстрый и вежливый возврат. Никаких проблем, никаких вопросов, никаких «если» и «но».
Это обещание.
Вопросы? Звоните 24 часа в сутки 7 дней в неделю
США(217) 408-4452
Австралия 0434 284 495
Доставка
Продукт будет доставлен вам через загрузку после авторизации вашего платежа.
Формат схемы настройки PID
ПРИМЕЧАНИЕ. Вам потребуется программа Acrobat Reader для просмотра схемы настройки PID, которую вы получите в формате PDF. Если у вас нет программы Acrobat Reader, вы можете скачать ее бесплатно, нажав здесь (откроется новое окно, чтобы вы не потеряли эту страницу). Журнал настройки ФИД представлен в формате MS Word, поэтому вы можете заполнить его в электронном виде, а также изменить в соответствии со стилем документации вашей компании.Для симулятора/калькулятора PID и макроса Bonus Linearizer требуется MS Excel 2003 или выше.
Если у вас нет программы Acrobat Reader, вы можете скачать ее бесплатно, нажав здесь (откроется новое окно, чтобы вы не потеряли эту страницу). Журнал настройки ФИД представлен в формате MS Word, поэтому вы можете заполнить его в электронном виде, а также изменить в соответствии со стилем документации вашей компании.Для симулятора/калькулятора PID и макроса Bonus Linearizer требуется MS Excel 2003 или выше.
Финн Пикок
Автор схемы настройки ФИД
ОТКАЗ ОТ ОТВЕТСТВЕННОСТИ: Используйте этот или любой другой продукт на свой страх и риск. Используя этот продукт, вы соглашаетесь с тем, что вы можете обращаться за помощью по любым претензиям, связанным с использованием вами этого продукта, в соответствии с условиями нашей гарантии.
Практический метод настройки ПИД-регулятора для расхода, уровня, pH, давления, температуры, сервопривода, скорости, положения, каскадного управления и многих других ПИД-контуров.
ПЛК
или ПИД-регулятор: в чем разница и как решить, какая технология вам нужна?
В общих чертах ПЛК, вероятно, являются одной из наиболее широко используемых технологий управления и автоматизации. Подсказка действительно исходит из названия PLC или «программируемый логический контроллер». Именно тот факт, что они программируемые, делает их настолько универсальными в применении. ПЛК содержат процессор, память для хранения программ и других данных, а также модули ввода и вывода.Обычно они программируются с помощью ПК, и может использоваться ряд различных языков промышленного стандарта (IEC 61131-3).
Подсказка действительно исходит из названия PLC или «программируемый логический контроллер». Именно тот факт, что они программируемые, делает их настолько универсальными в применении. ПЛК содержат процессор, память для хранения программ и других данных, а также модули ввода и вывода.Обычно они программируются с помощью ПК, и может использоваться ряд различных языков промышленного стандарта (IEC 61131-3).
ПИД-регулятор отличается от ПЛК. Ему по-прежнему требуются входы и выходы для получения информации от процесса и отправки сигналов обратно для управления им, но он содержит специальные алгоритмы, предназначенные для управления процессом с одним или несколькими контурами управления. Термин «ПИД» относится к пропорционально-интегрально-дифференциальному управлению.
Краткое объяснение того, как работает ПИД-регулятор …
Целью контура управления является доведение процесса до желаемого значения (уставки).Это может быть так же просто, как диммер, подключенный к лампочке. Это пример управления «разомкнутым контуром», при котором оператор должен контролировать происходящее. Замкнутый контур управления обеспечивает обратную связь с системой управления, так что изменения в процесс могут вноситься автоматически. Продолжая нашу тему об лампочках, для этого потребуется встроить датчик освещенности в петлю, чтобы по мере того, как в комнате становилось темнее, ток на лампочке увеличивался, поэтому лампочка становилась ярче. «Уставка» в этом примере будет желаемым уровнем освещенности в комнате.
Это пример управления «разомкнутым контуром», при котором оператор должен контролировать происходящее. Замкнутый контур управления обеспечивает обратную связь с системой управления, так что изменения в процесс могут вноситься автоматически. Продолжая нашу тему об лампочках, для этого потребуется встроить датчик освещенности в петлю, чтобы по мере того, как в комнате становилось темнее, ток на лампочке увеличивался, поэтому лампочка становилась ярче. «Уставка» в этом примере будет желаемым уровнем освещенности в комнате.
ПИД-регулятор используется там, где требуется более высокий уровень точности управления. Он объединяет три элемента управления, чтобы дать один выходной сигнал для управления заданным значением. Зона пропорциональности дает выходной сигнал, пропорциональный ошибке (разнице между заданным значением и фактическим значением процесса). Контроллер настраивается с диапазоном полосы пропорциональности, который направлен на то, чтобы значение процесса достигло заданного значения в кратчайшие сроки без длительных колебаний вокруг заданного значения. Если диапазон задан слишком широким, полная мощность будет отключена, но при этом будет сохраняться большая ошибка, и заданное значение не будет достигнуто.Если диапазон слишком узкий, питание будет оставаться включенным до тех пор, пока значение процесса не станет очень близким к заданному значению, что приведет к значительному «перерегулированию». По мере того, как он пытается выровнять себя, узкая полоса вызовет включение и выключение питания, что вызовет колебания вокруг заданного значения, для установления которых потребуется много времени – если они вообще когда-либо будут происходить.
Если диапазон задан слишком широким, полная мощность будет отключена, но при этом будет сохраняться большая ошибка, и заданное значение не будет достигнуто.Если диапазон слишком узкий, питание будет оставаться включенным до тех пор, пока значение процесса не станет очень близким к заданному значению, что приведет к значительному «перерегулированию». По мере того, как он пытается выровнять себя, узкая полоса вызовет включение и выключение питания, что вызовет колебания вокруг заданного значения, для установления которых потребуется много времени – если они вообще когда-либо будут происходить.
Пропорциональное управление не дает оператору возможности увеличить потребляемую мощность, если уставка не может быть достигнута. В контуре управления всегда есть потери.Проще говоря, подумайте о своем доме и, например, о том, идеально ли он изолирован. Если потери в системе уравновешивают пропорциональное управление, процесс никогда не достигнет заданного значения. В таких случаях требуется дополнительная мощность. Чтобы решить эту потенциальную проблему, интегральное управление определяет реакцию управления на основе суммы последних ошибок, чтобы закрыть любые пробелы.
Чтобы решить эту потенциальную проблему, интегральное управление определяет реакцию управления на основе суммы последних ошибок, чтобы закрыть любые пробелы.
Пропорционально-интегральное (ПИ) регулирование реагирует на изменения, наблюдаемые контроллером процесса, и поэтому является ретроспективным.Производное управление определяет реакцию управления на основе скорости изменения ошибки и таким образом предвосхищает требования управления. Этот элемент алгоритма управления предназначен для уменьшения перерегулирования и недорегулирования уставки управления. Это помогает повысить стабильность и справиться с внезапными изменениями в процессе; Например, внезапное изменение температуры из-за открытия двери.
Вам нужно ПИД-регулирование?
Управление, подобное тому, которое обеспечивается алгоритмами управления Eurotherm, может удовлетворить самые разные потребности в управлении.Конечно, контроллеры могут обеспечивать прямое управление и обеспечивать надежную, гарантированную производительность, которая оптимизирует и максимизирует общую производительность процесса. Отличие от системы управления Eurotherm проявляется в ряде различных областей. Алгоритмы автонастройки Eurotherm (автонастройка помогает настроить процесс и добиться оптимальных настроек пропорциональных, интегральных и производных составляющих) экономят время и деньги инженеров. Преимущества производительности самого управления означают повышенную стабильность и воспроизводимость процесса.Система управления Eurotherm особенно полезна в строго регулируемых или сложных системах управления.
Отличие от системы управления Eurotherm проявляется в ряде различных областей. Алгоритмы автонастройки Eurotherm (автонастройка помогает настроить процесс и добиться оптимальных настроек пропорциональных, интегральных и производных составляющих) экономят время и деньги инженеров. Преимущества производительности самого управления означают повышенную стабильность и воспроизводимость процесса.Система управления Eurotherm особенно полезна в строго регулируемых или сложных системах управления.
Наряду с ПИД-регулятором мирового класса компания Eurotherm гарантирует, что предлагаемые ею устройства удовлетворяют потребности других областей применения и промышленности. В аэрокосмической промышленности, например, ввод-вывод должен соответствовать определенному уровню точности и чувствительности, чтобы точно соответствовать требованиям термической обработки и уровням качества, предъявляемым этой отраслью. Многие более сложные процессы также не требуют единого заданного значения.Для них требуется заданное значение, которое изменяется во времени — профиль заданного значения. Для удовлетворения этих потребностей без больших затрат на проектирование требуются гибкие инструменты программирования уставок.
Для удовлетворения этих потребностей без больших затрат на проектирование требуются гибкие инструменты программирования уставок.
Стабильное и точное управление дает множество преимуществ. При правильном применении хороший контроль оказывает большое влияние на рентабельность предприятия. Это сократит время процесса, улучшит качество продукции, снизит затраты, связанные с ломом, и оптимизирует использование энергии.
Надежная запись данных
Наряду с хорошим контролем во многих отраслях промышленности также требуется запись процесса.Раньше это достигалось с помощью бумажных самописцев. Операторы периодически брали бумажную запись из регистратора и хранили по мере необходимости либо вместе с партией товаров, либо в архиве. Некоторое время назад бумажные самописцы были вытеснены графическими безбумажными самописцами. Они обеспечивали защищенные электронные записи, которые можно было архивировать на флэш-накопителях, съемных электронных носителях или по сети. Это естественное развитие означало, что хранение и поиск в архивах данных стали намного эффективнее. Сегодня нередко запись данных осуществляется блоком управления. Однако опять же, безопасность и точность этих записей жизненно важны для определенных отраслей, и не все записи или стратегии записи одинаковы! Обеспечение полноты и безопасности записей требует осторожности, требует тщательного проектирования и понимания правил, позволяющих использовать электронные записи.
Сегодня нередко запись данных осуществляется блоком управления. Однако опять же, безопасность и точность этих записей жизненно важны для определенных отраслей, и не все записи или стратегии записи одинаковы! Обеспечение полноты и безопасности записей требует осторожности, требует тщательного проектирования и понимания правил, позволяющих использовать электронные записи.
ПЛК или ПИД-регулятор?
В некоторых отраслях, где точность и безопасность имеют первостепенное значение, необходимы специальные знания и алгоритмы ФИД.Такие функции, как гибкие программаторы заданных значений и алгоритмы автонастройки, помогают держать под контролем инженерные бюджеты. Однако ПЛК предлагают большую гибкость и свободу в программировании для удовлетворения более широких потребностей приложений. Используемые языки программирования также часто знакомы, поскольку технология используется во многих различных областях предприятия.
Так почему бы не иметь оба? Серия E+PLC от Eurotherm by Schneider Electric сочетает в себе лучшее из обоих миров. Он интегрирует проверенные, общепринятые алгоритмы управления Eurotherm в платформу ПЛК, которая использует стандартные языки программирования IEC.Затраты на проектирование оптимизируются за счет использования стандартных функциональных блоков, многоразового проектирования, гибких вариантов связи и готовой интегрированной визуализации с автоматическим разрешением тегов. Он предлагает пользователям автоматически настраиваемый отклик ПИД-регулятора, который обеспечивает более быстрое управление без перерегулирования или колебаний, а также более жесткое и стабильное управление без необходимости ручного вмешательства. Ввод-вывод с высоким разрешением и безопасная запись, основанные на многолетнем опыте в этой области, открывают путь к дальнейшему снижению затрат на проектирование и более легкому соблюдению нормативных требований.
Он интегрирует проверенные, общепринятые алгоритмы управления Eurotherm в платформу ПЛК, которая использует стандартные языки программирования IEC.Затраты на проектирование оптимизируются за счет использования стандартных функциональных блоков, многоразового проектирования, гибких вариантов связи и готовой интегрированной визуализации с автоматическим разрешением тегов. Он предлагает пользователям автоматически настраиваемый отклик ПИД-регулятора, который обеспечивает более быстрое управление без перерегулирования или колебаний, а также более жесткое и стабильное управление без необходимости ручного вмешательства. Ввод-вывод с высоким разрешением и безопасная запись, основанные на многолетнем опыте в этой области, открывают путь к дальнейшему снижению затрат на проектирование и более легкому соблюдению нормативных требований.
ПИД-регулятор — Academic Kids
ПИД-регулятор — Academic Kids
От академических детей
В Википедии нет статьи с таким точным названием.
- Если вы создали эту страницу за последние несколько минут и она еще не появилась, она может быть не видна из-за задержки обновления базы данных. Попробуйте очистить ( https://academickids.com:443/encyclopedia/index.php?title=Pid_controller&action=purge ), в противном случае подождите и проверьте позже, прежде чем пытаться воссоздать страницу.
- Если вы ранее создавали статью под этим заголовком, возможно, она была удалена. Смотрите кандидатов на скорейшее удаление по возможным причинам.
Навигация
Академическое детское меню
- Искусство и культура
- Арт ( http://www.acadekids.com/encyclopedia/index.php/Art )
- Архитектура ( http://www.academickids.com/encyclopedia/index.php/Architecture )
- Культуры ( http://www.academickids.com/encyclopedia/index.php/Cultures )
- Музыка ( http://www.academickids. com/encyclopedia/index.php/Music )
- Музыкальные инструменты ( http://academickids.com/encyclopedia/index.php/List_of_musical_instruments )
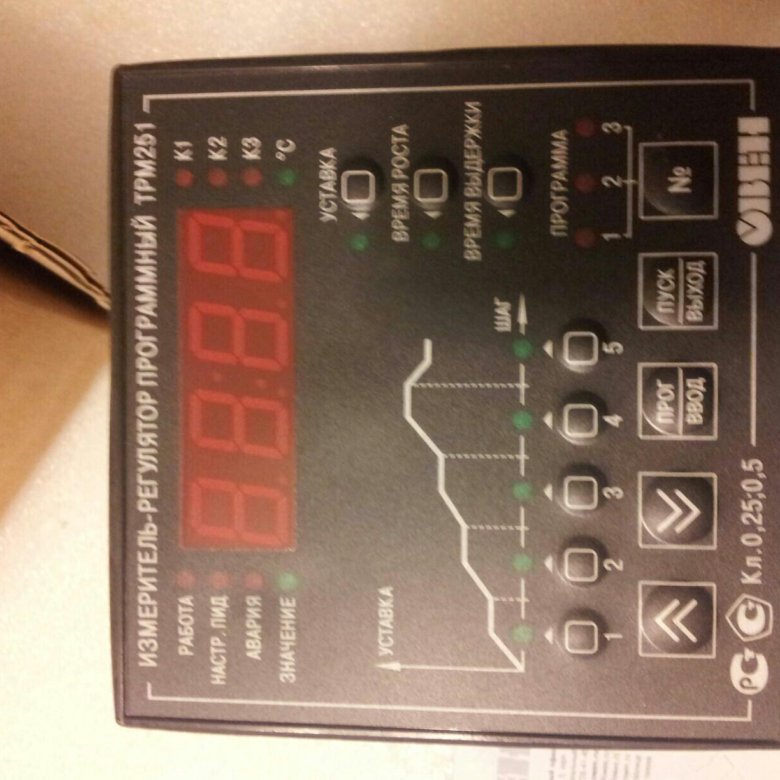 com/encyclopedia/index.php/Music )
com/encyclopedia/index.php/Music )- Биографии ( http://www.acadekids.com/encyclopedia/index.php/Biographies )
- Клипарт ( http://www.academickids.com/encyclopedia/index.php/Clipart )
- География ( http://www.academickids.com/encyclopedia/index.php/Geography )
- Страны мира ( http://www.academickids.com/encyclopedia/index.php/Countries )
- Карты ( http://www.academickids.com/encyclopedia/index.php/Maps )
- Флаги ( http://www.acadekids.com/encyclopedia/index.php/Flags )
- Континенты ( http://www.academickids.com/encyclopedia/index.php/Continents )
- История ( http://www.academickids.com/encyclopedia/index.php/History )
- Древние цивилизации ( http://www.academickids. com/encyclopedia/index.php/Ancient_Civilizations )
- Промышленная революция ( http://www.academickids.com/encyclopedia/index.php/Industrial_Revolution )
- Средневековье ( http://www.academickids.com/encyclopedia/index.php/Middle_Ages )
- Предыстория ( http://www.academickids.com/encyclopedia/index.php/Prehistory )
- Ренессанс ( http://www.academickids.com/encyclopedia/index.php/Renaissance )
- Хронология ( http://www.academickids.com/encyclopedia/index.php/Timelines )
- США ( http://www.acadekids.com/encyclopedia/index.php/United_States )
- Войны ( http://www.academickids.com/encyclopedia/index.php/Wars )
- Всемирная история ( http://www.academickids.com/encyclopedia/index.php/History_of_the_world )
- Древние цивилизации ( http://www.academickids.
 com/encyclopedia/index.php/Ancient_Civilizations )
com/encyclopedia/index.php/Ancient_Civilizations )- Тело человека ( http://www.academickids.com/encyclopedia/index.php/Human_Body )
- Математика ( http://www. academickids.com/encyclopedia/index.php/Математика )
- Ссылка ( http://www.academickids.com/encyclopedia/index.php/Reference )
- Наука ( http://www.academickids.com/encyclopedia/index.php/Science )
- Животные ( http://www.academickids.com/encyclopedia/index.php/Animals )
- Авиация ( http://www.academickids.com/encyclopedia/index.php/Aviation )
- Динозавры ( http://www.academickids.ком/энциклопедия/index.php/Динозавры )
- Земля ( http://www.academickids.com/encyclopedia/index.php/Earth )
- Изобретения ( http://www.academickids.com/encyclopedia/index.php/Inventions )
- Физические науки ( http://www.academickids.com/encyclopedia/index.php/Physical_Science )
- Растения ( http://www.academickids.com/encyclopedia/index.php/Plants )
- Ученые ( http://www.acadekids.com/encyclopedia/index.php/Scientists )
- Социальные науки ( http://www. academickids.com/encyclopedia/index.php/Social_Studies )
- Антропология ( http://www.academickids.com/encyclopedia/index.php/Anthropology )
- Экономика ( http://www.academickids.com/encyclopedia/index.php/Economics )
- Правительство ( http://www.academickids.com/encyclopedia/index.php/Government )
- Религия ( http://www.acadekids.com/encyclopedia/index.php/Религия )
- Праздники ( http://www.academickids.com/encyclopedia/index.php/Holidays )
- Космос и астрономия
- Солнечная система ( http://www.academickids.com/encyclopedia/index.php/Solar_System )
- Планеты ( http://www.academickids.com/encyclopedia/index.php/Planets )
- Спорт ( http://www.academickids.ком/энциклопедия/index.php/Спорт )
- Хронология ( http://www.academickids.com/encyclopedia/index.php/Timelines )
- Погода ( http://www. academickids.com/encyclopedia/index.php/Weather )
- Штаты США ( http://www.academickids.com/encyclopedia/index.php/US_States )
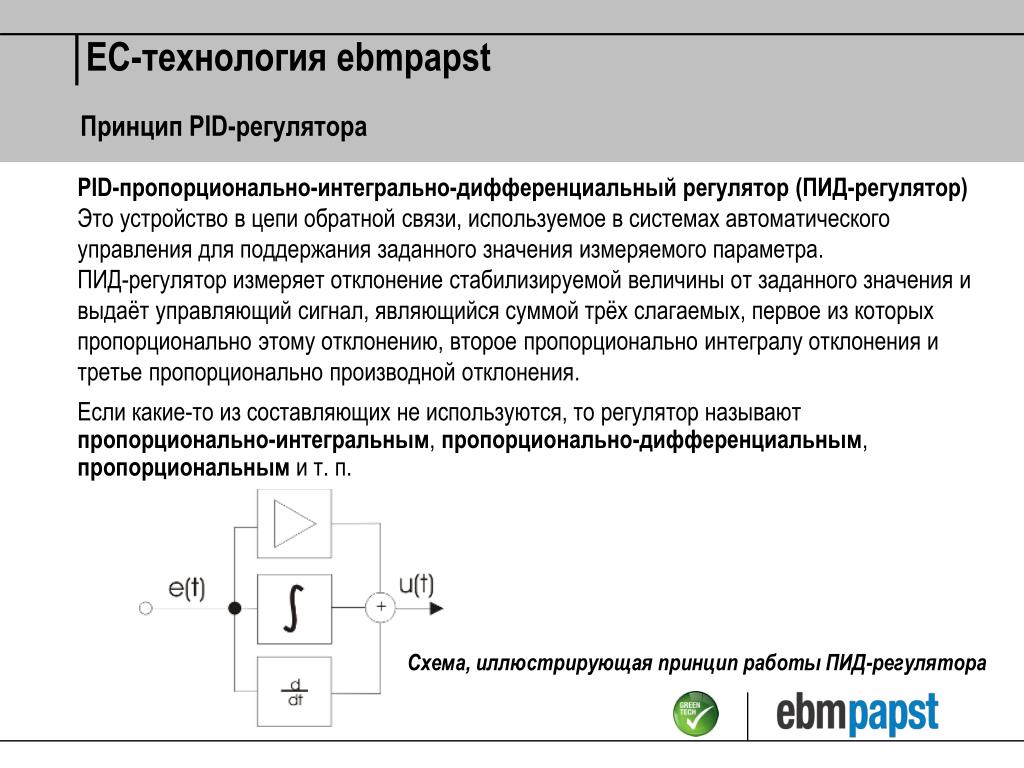 academickids.com/encyclopedia/index.php/Математика )
academickids.com/encyclopedia/index.php/Математика ) academickids.com/encyclopedia/index.php/Social_Studies )
academickids.com/encyclopedia/index.php/Social_Studies ) academickids.com/encyclopedia/index.php/Weather )
academickids.com/encyclopedia/index.php/Weather )Информация
- Домашняя страница ( http://academickids.com/encyclopedia/index.PHP )
- Свяжитесь с нами ( http://www.academickids.com/encyclopedia/index.php/Contactus )
Бесплатный инструмент для настройки усиления ПИД-регулятора
Этот бесплатный онлайн-инструмент настройки коэффициента усиления ПИД-регулятора помогает нам узнать параметры настройки ПИД-регулятора путем импорта данных переходной характеристики в веб-приложение.
Инструмент настройки ПИД-регулятора
Ссылка на программное обеспечение PID: PID Tuner
Как использовать PID Tuner?
Шаг 1:
Создайте входной сигнал переходного процесса для вашего ПИД-регулятора.
Запишите время, входные и выходные значения теста.
Шаг 2:
Импортируйте данные переходного процесса. Обратитесь к приведенной выше анимации.
Скопируйте и вставьте в таблицу ниже, используя сочетание клавиш Ctrl+V. Сопоставьте каждый столбец таблицы с соответствующими данными.
Все три столбца должны быть одинаковой длины. Требуется не менее 50 образцов. Щелкните правой кнопкой мыши заголовки или строки таблицы, чтобы открыть контекстное меню.
Шаг 3:
Данные переходного процесса могут содержать несколько шагов, но для целей настройки требуется только один шаг.Пожалуйста, выберите наименьший временной диапазон, в котором содержатся данные только об одной переходной характеристике.
Можно определить пользовательские диапазоны путем перетаскивания вертикальных линий.
Шаг 4:
Автоматически выбирается тип модели, который лучше всего соответствует данным переходного процесса. Можно выбрать другую модель, нажав на нее.
Можно выбрать другую модель, нажав на нее.
Можно выбрать модели 1-го порядка, 2-го порядка, интегратора, интегратора с запаздыванием и двойного интегратора.
Отдельные параметры модели можно обновить вручную.Нажмите Enter после изменения параметра, чтобы обновить симуляцию.
Шаг 5:
Эти коэффициенты усиления ПИД обеспечивают отправную точку для настройки вашего ПИД.
Не стесняйтесь изменять коэффициенты усиления ПИД-регулятора по своему усмотрению и наблюдайте за изменением результирующего шага и отклика на возмущение в реальном времени.
Нажмите Enter после изменения коэффициента усиления, чтобы обновить симуляцию.
Пробуйте различные комбинации усиления ПИД-регулятора, пока не получите желаемый результат.
Наконец, запишите значения усиления ПИД-регулятора.
Затем обновите ваш реальный ПИД-регулятор с этими параметрами и наблюдайте за его реакцией в режиме реального времени.
Установите PID Tuner для работы в автономном режиме
Читать дальше:
9.2: P, I, D, PI, PD и ПИД-регулирование
Как и многие инженерные системы, ПИД-регуляторы можно моделировать в Excel с помощью численных методов, таких как метод Эйлера. Сначала начните с начального значения для данного параметра. Определите изменение этого параметра на определенном временном шаге путем суммирования трех регуляторов P, I и D на этом шаге, которые находятся с использованием уравнений, перечисленных в разделе P, I, D, PI, PD, PID Control выше. .Возьмите это изменение, умножьте его на выбранный временной шаг и добавьте его к предыдущему значению интересующего параметра. Для получения более подробной информации см. Численное решение ОДУ в Excel. Пример химической инженерной задачи, в которой используется этот метод, можно увидеть в примере 4 ниже.
Устранение неполадок моделирования PID в Excel
При настройке электронной таблицы Excel для моделирования ПИД-регулятора вы можете получить сообщение об ошибке, в котором говорится, что вы создали циклическую ссылку.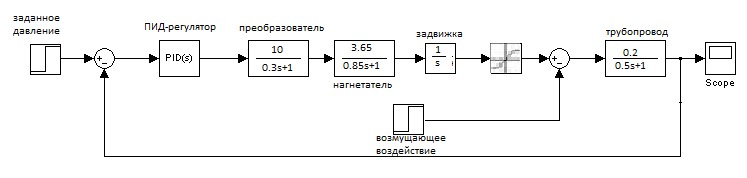 Скажем, вы контролируете расход одного реагента (\(B\)) в реактор, который зависит от концентрации другого реагента (\(A\)) уже внутри реактора.Ваши уравнения PID выглядят следующим образом:
Скажем, вы контролируете расход одного реагента (\(B\)) в реактор, который зависит от концентрации другого реагента (\(A\)) уже внутри реактора.Ваши уравнения PID выглядят следующим образом:
\[FB=1+K_{c}\left[\left(AA_{\mathrm{set}}\right)+\frac{1}{\tau_{i}} \int\left(A- A _ {\ mathrm {set}} \ right) d t + \ tau_ {d} \ frac {d \ left (AA _ {\ mathrm {set}} \ right)} {dt} \ right] \ nonumber \]
и
\[x_ {i} = \ frac {d \ left (AA _ {\ mathrm {set}} \ right)} {d t} \ nonumber \]
После того, как вы настроили столбцы для \(A — A_{набор}\), \(d(A — A_{набор})/dt\), \(x_i\) и ячейки для ваших параметров, таких как \ (K_c\), \(\tau_i\) и \(\tau_d\), вам нужно будет настроить столбец PID с уравнением PID.После ввода уравнения в первую ячейку столбца PID вы можете получить сообщение об ошибке Circular Reference при попытке перетащить уравнение в другие ячейки столбца.
Вы можете сделать две вещи:
- Вероятно, вам нужно начать формулу PID со второй или третьей ячейки столбца PID. Введите разумные значения в первую пару ячеек, прежде чем вы начнете уравнение PID, и вы обнаружите, что эти значения не должны влиять на конечный результат вашего контроллера.
- Вы также можете попробовать уменьшить размер шага (\(Δt\)).
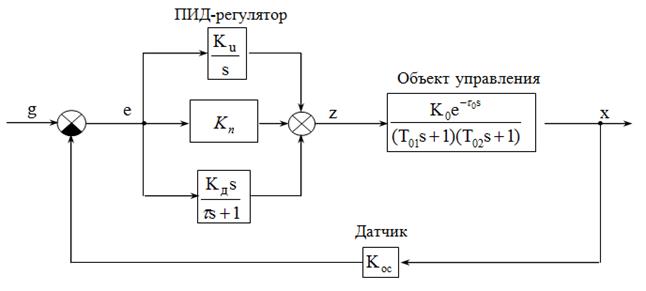 Введите разумные значения в первую пару ячеек, прежде чем вы начнете уравнение PID, и вы обнаружите, что эти значения не должны влиять на конечный результат вашего контроллера.
Введите разумные значения в первую пару ячеек, прежде чем вы начнете уравнение PID, и вы обнаружите, что эти значения не должны влиять на конечный результат вашего контроллера.Сводные таблицы
Сводка преимуществ и недостатков трех элементов управления показана ниже в Таблице 1.
Таблица 1. Преимущества и недостатки элементов управления
Руководство по типичному использованию различных контроллеров показано ниже в таблице 2.
Таблица 2. Типичные области применения P-, I-, D-, PI- и PID-регуляторов
Краткое изложение определений терминов и символов приведено ниже в Таблице 3.
Таблица 3. Определения терминов и символов.
Пример \(\PageIndex{1}\)
Компания
Hypothetical Industries только что поручила вам управлять одним из своих реакторов периодического действия. Ваша задача — найти способ поддерживать заданный уровень внутри реактора. Ваш босс хочет использовать контроллер регулятора какого-то типа, но он не совсем уверен, какой использовать. Помогите своему боссу найти правильный тип контроллера. Чрезвычайно важно, чтобы уровень внутри реактора был на заданном уровне.Большие колебания и ошибки недопустимы.
Ваша задача — найти способ поддерживать заданный уровень внутри реактора. Ваш босс хочет использовать контроллер регулятора какого-то типа, но он не совсем уверен, какой использовать. Помогите своему боссу найти правильный тип контроллера. Чрезвычайно важно, чтобы уровень внутри реактора был на заданном уровне.Большие колебания и ошибки недопустимы.
Раствор
Вы хотите использовать ПИД-регулятор. Из-за действия П-управления система будет реагировать на изменение очень быстро. Благодаря действию регулятора I система может быть возвращена к заданному значению. Наконец, поскольку для системы очень важно оставаться на постоянном заданном значении, D-регулирование будет измерять изменение ошибки и поможет соответствующим образом отрегулировать систему.
Пример \(\PageIndex{2}\)
Вы возвращаетесь в свою старшую школу и замечаете духовку в своем старом классе химии.Печь используется для удаления воды из растворов. Используя свои знания из ЧЭ 466, вы начинаете задаваться вопросом, какой тип контроллера использует духовка для поддержания заданной температуры. Вы замечаете, что некоторые старшеклассники хотят учиться, и решаете поделиться с ними своими знаниями в надежде вдохновить их стать инженерами-химиками. Объясните им тип контроллера, который, скорее всего, находится внутри печи, и как он работает.
Вы замечаете, что некоторые старшеклассники хотят учиться, и решаете поделиться с ними своими знаниями в надежде вдохновить их стать инженерами-химиками. Объясните им тип контроллера, который, скорее всего, находится внутри печи, и как он работает.
Раствор
Поскольку печь используется только для удаления воды из раствора, флуктуации, ошибки и отставание между заданным значением и фактической температурой допустимы.Поэтому самым простым и простым в использовании контроллером будет двухпозиционный контроллер. Контроллер включения-выключения включает механизм нагрева, когда температура в духовке ниже заданной температуры. Если температура духовки превысит установленную температуру, контроллер выключит механизм нагрева.
Пример \(\PageIndex{3}\)
Прислушавшись к вашему совету, ваш босс в Hypothetical Industries решает установить ПИД-регулятор для контроля уровня в реакторе периодического действия.При первом запуске реактора контроллер изначально получил ступенчатый вход. Когда реактор достигает устойчивого состояния, уровень в реакторе имеет тенденцию колебаться, посылая импульсы на вход контроллера. Для импульсного входа предоставьте графическое представление выхода ПИД-регулятора.
Когда реактор достигает устойчивого состояния, уровень в реакторе имеет тенденцию колебаться, посылая импульсы на вход контроллера. Для импульсного входа предоставьте графическое представление выхода ПИД-регулятора.
Рисунок 8. Импульсный вход.
Раствор
Выход ПИД-регулятора будет представлять собой комбинацию выходов контроллера только P, только I и только D. Аналогично выходу П-регулятора для ступенчатого входа, выход П-регулятора для импульсного входа будет в точности соответствовать входу.
Рис. 9. Выход П-регулятора для импульсного входа.
Выход И-регулятора представляет собой область под входным графиком. В отличие от ступенчатого ввода, площадь под графиком импульсного ввода падала до нуля после прохождения импульса. Следовательно, вместо того, чтобы постоянно увеличиваться, выходной график И-регулятора в конце концов выровняется.
Рис. 10. Выход I-регулятора для импульсного входа.
Выходной сигнал D-регулятора представляет собой производную входного графика. Производная на первом разрыве графика была бы положительной бесконечностью.Производная второго нисходящего разрыва равна отрицательной бесконечности.
Производная на первом разрыве графика была бы положительной бесконечностью.Производная второго нисходящего разрыва равна отрицательной бесконечности.
Рис. 11. Выход D-контроллера для импульсного ввода.
Объединив качественные характеристики всех трех графиков, мы можем определить выход ПИД-регулятора для импульсного входа.
Рис. 12. Выход ПИД-регулятора для импульсного ввода.
Пример \(\PageIndex{3}\)
При определении надежности ПИД-регулятора возможны различные виды помех. Эти различные возмущения используются для имитации изменений, которые могут произойти в вашей системе.Для реактора CSTR вы решаете нагреть свою систему, чтобы учесть холодную погоду снаружи. Возмущение температуры на входе представляет собой линейное возмущение, как показано на рисунке #. Если контроллер реагирует на входную температуру, что будет на выходе ПИД-регулятора?
Рисунок 13. Вход рампы.
Раствор
Используя контроллер только с p-only контроллером, мы увидим пропорциональное изменение выходного сигнала контроллера, соответствующее изменению входной переменной. См. рис. 14 ниже
См. рис. 14 ниже
.
Рис. 14. Выход П-регулятора для линейного входа.
Используя только I-контроллер, мы увидим контроллер, соответствующий области под графиком, которая в этом случае, кажется, экспоненциально увеличивается с геометрией рампы.
Рис. 15. Выход I-регулятора для линейного входа.
Используя D-only контроллер, мы увидим ступенчатую реакцию на линейное возмущение. Это связано с тем, что D-составляющая соответствует производной, а ввод рампы показывает постоянный наклон (в данном случае положительный), который отличается от наклона начальных условий (обычно ноль).См. рис. 16.
Рис. 16. Выход D-контроллера для линейного входа.
При использовании ПИД-регулятора все три компонента вступают в игру на выходе контроллера. Как и следовало ожидать, результатом будет простое добавление трех отдельных графиков компонентов.
Рис. 17. Выход D-контроллера для линейного входа.
Пример \(\PageIndex{6}\)
Ниже приведен P&ID процесса A+B—>C.
Рисунок 18. P&ID для процесса реакции.
P&ID для процесса реакции.
Что такое выражение ПИД-регулятора на V3, регулирующее объем в TK001 до уставки 50 литров? Примечание. ПИД-регулятор использует LC1 для измерения объема.
Раствор
Общее уравнение для ПИД-регулятора:
\[c(t)=K_{c}\left[e(t)+\frac{1}{T_{i}} \int e(t) d t+T_{d} \frac{de}{ dt}\right]+C \номер\]
где
- \(c(t)\) = выход контроллера
- \(K_c\) = усиление регулятора
- \(е(т)\) = ошибка
- \(T_i\) = время интегрирования
- \(T_d\) = производная постоянная времени
- \(C\) = начальное значение контроллера
Следовательно, для этого примера решение:
\[F_{\mathrm{out}}=offse t+K_{c}\left[\left(V_{1}-V_{\mathrm{set}}\right)+\frac{1}{T_{ i}} \int\left(V_{1}-V_{\mathrm{set}}\right) d t+T_{d} \frac{d\left(V_{1}-V_{\mathrm{vet} }\справа)}{дт}\справа].\номер\]
Пример \(\PageIndex{6}\)
В этой задаче будут определены дифференциальные уравнения, описывающие конкретную систему первого порядка с ПИД-регулятором. Это разработано, чтобы показать, как четко определенные системы могут быть смоделированы или объяснены математически. В качестве дополнения к этой задаче посетите Построение блок-схем. Обратите внимание, что это пример решения с использованием интегро-дифференциальных операторов, а не преобразований Лапласа. Здесь мы установили \(K_p = 1\).{t} d \tau+\tau_{D} \frac{d}{d t}\right] \nonumber\]
Это разработано, чтобы показать, как четко определенные системы могут быть смоделированы или объяснены математически. В качестве дополнения к этой задаче посетите Построение блок-схем. Обратите внимание, что это пример решения с использованием интегро-дифференциальных операторов, а не преобразований Лапласа. Здесь мы установили \(K_p = 1\).{t} d \tau+\tau_{D} \frac{d}{d t}\right] \nonumber\]
Решение: Используйте блок-схемы построения в качестве справочного материала при решении этой проблемы.
Система определения уравнений,
- Процесс: τ p Y ‘( t ) + Y ( t ) = X ( t 2 )
8
- Контроллер: X ( t ) = G ε( t )
- Компаратор: ε( t ) = R ( t ) − M ( t )
- Измерение: M ( t ) = Y ( t )
Когда эти уравнения объединяются в одно уравнение, получается следующее уравнение. {\ простое} (т) + R (т) \]
{\ простое} (т) + R (т) \]
Приведенное выше уравнение можно решить вручную или с помощью такой программы, как Mathematica.При использовании компьютерной программы можно выбрать различные значения параметров управления K c , τ I , τ D , а реакцию системы на изменение можно оценить графически.
Упражнение \(\PageIndex{1}\)
Какой тип контроллера отображается в приведенном ниже уравнении?
\[c(t)=K_{c}\left[e(t)+\frac{1}{T_{i}} \int e(t) d t\right]\nonumber\]
- Прямая связь
- ПИД-код
- Производная
- Пропорциональный интеграл
- Ответить
д
Упражнение \(\PageIndex{2}\)
Какой тип контроллера повышает стабильность системы, поддерживая ее на постоянном уровне?
- Производная
- Пропорциональный
- Двухпозиционный
- Интеграл
- Ответить
и
Упражнение \(\PageIndex{3}\)
Какой тип контроллера увеличивает скорость отклика для достижения желаемой уставки быстрее всего, устраняя при этом смещение?
- Двухпозиционный
- Пропорциональный
- Интеграл
- Пропорционально-интегральный
- Ответить
д
Лаборатория микробиологии обнаружила новый смертельно опасный штамм бактерий, названный P. Woolfi, в городском водоснабжении. Чтобы стерилизовать воду, бактерии должны быть убиты нагреванием при температуре 105 градусов по Цельсию. Однако это выше точки кипения воды при 1 атм, и бактерии восприимчивы к теплу только в жидкости из-за образования спор в газе или паре. Для осуществления этой стерилизации было предложено использовать автоклав для поддержания воды в жидком состоянии, поддерживая ее при давлении 5 атм при нагревании в течение 30 секунд. Автоклав может выдерживать давление до 7 атм перед взрывом, поэтому, чтобы убедиться, что процесс работает с требуемыми характеристиками, необходимо создать модель ПИД-регулятора в Excel.См. рис. 18, где изображена система.
Woolfi, в городском водоснабжении. Чтобы стерилизовать воду, бактерии должны быть убиты нагреванием при температуре 105 градусов по Цельсию. Однако это выше точки кипения воды при 1 атм, и бактерии восприимчивы к теплу только в жидкости из-за образования спор в газе или паре. Для осуществления этой стерилизации было предложено использовать автоклав для поддержания воды в жидком состоянии, поддерживая ее при давлении 5 атм при нагревании в течение 30 секунд. Автоклав может выдерживать давление до 7 атм перед взрывом, поэтому, чтобы убедиться, что процесс работает с требуемыми характеристиками, необходимо создать модель ПИД-регулятора в Excel.См. рис. 18, где изображена система.
Рисунок 18. Автоклав с ПИД-регулятором температуры и давления
Нажмите на эту ссылку, чтобы просмотреть разработанное решение Excel
Объяснение:
Чтобы смоделировать реальную ситуацию изменения давления в системе, столбец B вызывает уравнение для создания случайных колебаний давления.