Какими бывают промышленные роботы? Шесть основных типов.
Содержание:
- Вступление
- Типы роботов
- Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
- Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
- Линейный робот (Декартов робот, Cartesian robot)
- Шарнирный робот (ARTICULATED ROBOT)
- SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
- Параллельный робот (Дельта робот, робот-паук)
- Заключение
Вступление
Первый промышленный робот в Японии был произведён полвека назад. В 1968 году компания Kawasaki Heavy Industries подписала лицензионное соглашение с американской венчурной компанией Unimation и начала собственное производство в Японии. Первый японский промышленный робот под названием «Kawasaki-Unimate 2000» был выпущен в 1969 году.
С этого момента производство промышленных роботов, преимущественно сфокусированное на автомобильной промышленности, начало набирать обороты. Компания Kawasaki стала одним из крупнейших производителей промышленных роботов, заняв большую долю на мировом рынке и создав основу для того, чтобы Япония стала всемирно признанным «Королевством робототехники». Можно считать, что промышленная робототехника родилась в США, но выросла в Японии.
Компания Kawasaki стала одним из крупнейших производителей промышленных роботов, заняв большую долю на мировом рынке и создав основу для того, чтобы Япония стала всемирно признанным «Королевством робототехники». Можно считать, что промышленная робототехника родилась в США, но выросла в Японии.
Промышленных роботов можно разделить на 6 основных типов.
Сегодня промышленные роботы используются не только в автомобильной промышленности, но и при сборке электроники, и в пищевом производстве. Роботы успешно используются для решения многих задач: сварка, покраска, сборка, паллетирование. Для того, чтобы наилучшим способом адаптироваться к каждому типу задачи — промышленные роботы бывают различных типов, различных конструкций и с разными функциями.
Несмотря на большое разнообразие, решаемых роботом, задач, и вариаций конструкции, выделяют 6 основных типов роботов.
Разница заключается в типе соединения и механической конструкции.

Существуют различные способы структуризации промышленных роботов: по размеру, нагрузке, сфере применения. В этой статье мы остановимся на структуризации по типу соединения звеньев робота и механической конструкции.
Оси робота как суставы человека
У роботов могут быть и вращательные и линейные оси. Количество соединений в роботе является количеством осей или степеней свободы (DOF). Количество и типы соединений звеньев робота будет для нас основным фактором, позволяющим нам определить тип робота.
Можно найти много схожего в строении суставов робота и человека. Чаще всего двигатели вращают суставы робота, подобно как мышцы вращают запястье человек или сгибают руку в локте. Но есть и то, что у человека нет – это линейные соединения звеньев робота, позволяющие выдвигать вперёд/назад или верх/вниз сустав робота.
У каждого промышленного робота есть инструмент, который, как правило, крепится на запястье – это может быть сварочная горелка или захват. Для перемещения инструмента требуется как минимум три сустава, чтобы двигаться по трем осям координат. Для ориентирования сустава с инструментом, потребуется ещё 3 оси.
Для перемещения инструмента требуется как минимум три сустава, чтобы двигаться по трем осям координат. Для ориентирования сустава с инструментом, потребуется ещё 3 оси.
Теперь вы знаете основы, перейдем к основным типам роботов.
Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
Первый промышленный робот
Kawasaki-Unimate 2000 выпущенный в 1969 году
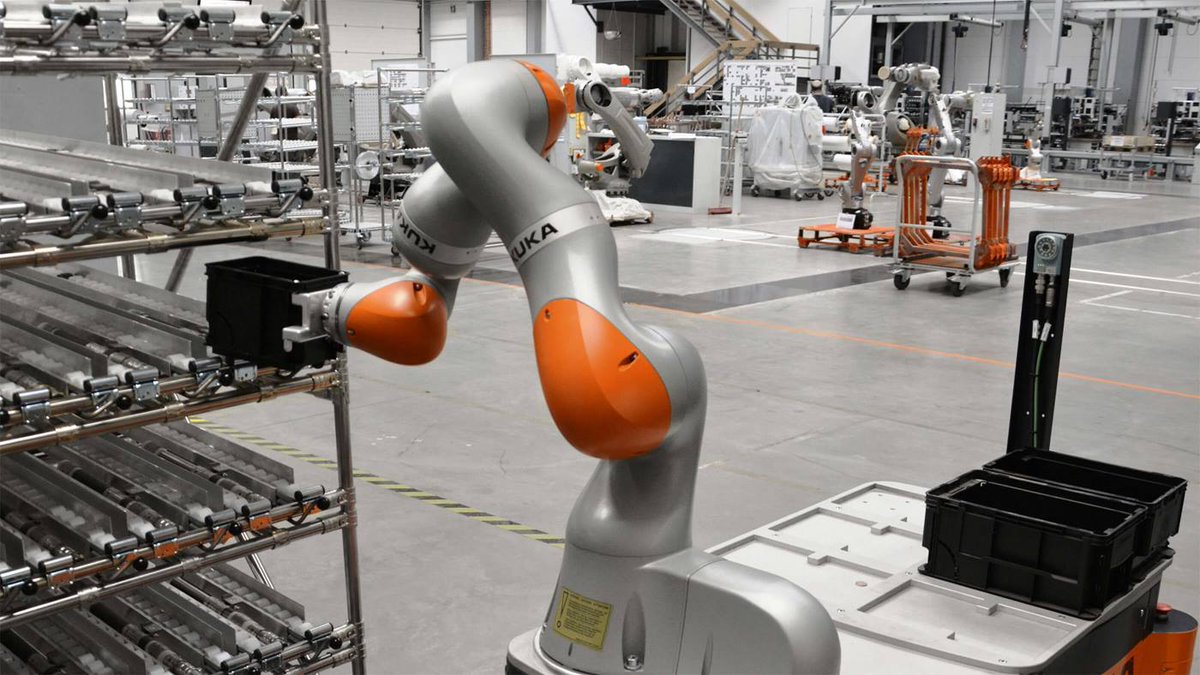
Этот робот имеет центральный поворотный вал как у башни танка и удлиняющуюся руку с вращающимся запястьем. Рука, способная удлиняться предназначена для достижения большого радиуса действия. Такой тип роботов широко использовался на заре промышленной робототехники. Робот Kawasaki-Unimate 2000, как раз этого типа.
Ниже редкое видео демонстрирующее работу первого японского промышленного робота Kawasaki-Unimate 2000
Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
Робот с 50-летней историей.
На фото робот Kawasaki TL420
для работы с жидкокристаллической стеклянной подложкой.
Этот робот похож на робота с полярной системой координат — у него также есть выдвигающаяся рука и поворотный вал. Но разница заключается в движении руки робота, которая может двигаться по вертикали, скользящим линейным, а не вращающимся движением. Сегодня роботы этого типа по-прежнему используются, например, для переноса LCD панелей для мониторов.
Линейный робот (Декартов робот) (Cartesian robot)
.
Простой в управлении.
Робот, работающий в прямоугольной системе координат. Движения этого робота похожи на игровой автомат, в котором нужно достать игрушку. Все звенья робота двигаются по трём перпендикулярным осям и не вращаются. Как правило, такой робот имеет большие габариты, но высокую точность и простоту в управлении. Этот тип роботов чаще применяется для перемещения тяжелых инструментов, а в качестве инструмента можно использовать даже целого робота.
На видео, пример конструкции с линейными осями с подвешенным шарнирным роботом Kawasaki
Шарнирный робот (ARTICULATED ROBOT)
Высокая гибкость движений
На фото универсальный робот Kawasaki CX210L
с грузоподъемностью 210 кг
Сегодня это самый распространенный промышленный робот. Конструкция представляет собой последовательно соединённые звенья. Каждое следующее звено крепится к концу другого. 6-ти осевой шарнирный робот имеет такую же подвижность, как и человеческая рука. Но считается, что программирование таких роботов гораздо сложнее. Однако, благодаря современным контроллерам Kawasaki, процесс создания управляющей программы чрезвычайно прост. Этот тип роботов используется для очень широкого круга задач, таких как палетирование, обслуживание станков, дуговая или точечная сварка и многое другое.
Пример современного 6-ти осевого шарнирного робота Kawasaki RS007L.
SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
Сборщик
На фото двурукий робот Kawasaki duAro1
Этот робот отличается тем, что все основные звенья перемещаются только в горизонтальной плоскости. И только инструмент на конце руки двигается в линейном направлении. За счёт высокой жесткости в вертикальном направлении роботы SCARA достигают высокой точности и скорости с двигателями меньшей мощности. Роботы с такой конструкцией наиболее востребованы в операциях по сборке. К примеру, SCARA робот duAro успешно применяется на заводах по сборке печатных плат и размещению полупроводниковых пластин.
На видео ниже представлена работа двухрукого робота DuAro. Робот собирает печатные платы.
Параллельный робот (Дельта робот, робот-паук)
Когда скорость важна
На фото высокоскоростной робот Kawasaki YF003N
Ключевым отличием таких роботов является конструкция из нескольких звеньев, прикрепленных к общему основанию, позволяющий сохранять пространственную ориентацию инструмента робота. Чаще всего дельта робот состоит из трёх таких рычагов. Все три рычага одновременно поддерживают захват робота на одинаковой высоте. Обладают высокой скоростью и применяются для операций сортировки или укладки цельной продукции в короба, и, как правило, устанавливается над конвейером.
На видео показано как робот YF03N сортирует листки базилика по размеру.
Заключение
Все вышеперечисленные роботы являются промышленными, но каждый отличается своими характеристиками: грузоподъёмностью, диапазоном рабочей зоны, точностью, скоростью, габаритами. В зависимости от типа соединения звеньев и конструкции каждый робот находит своё оптимальное применение, свою задачу с которой справляется лучше других.
В зависимости от типа соединения звеньев и конструкции каждый робот находит своё оптимальное применение, свою задачу с которой справляется лучше других.
При автоматизации вашего конкретного процесса важно понимать различные доступные варианты решения задачи, чтобы вы могли выбрать лучший тип промышленного робота под вашу задачу.
Если вы хотите обсудить, какой тип роботов лучше всего подходит для вашей конкретной задачи, свяжитесь с нами по телефону 8(812)209-11-03 или по адресу info@robowizard.ru
Навигация по статье:
- Вступление
- Типы роботов
- Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
- Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
- Линейный робот (Декартов робот, Cartesian robot)
- Шарнирный робот (ARTICULATED ROBOT)
- SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
- Параллельный робот (Дельта робот, робот-паук)
- Заключение
Типы промышленных роботов и их функции.
 ⋆ Системы промышленной автоматизации
⋆ Системы промышленной автоматизации
Уже никого не удивишь наличием на производственных предприятиях промышленных роботов. Уровень роботизации в промышленности растет изо дня в день. С ростом уровня роботизации увеличивается и разнообразие самих роботов. Разработчики придумывают все новые и новые разновидности роботов, для того чтобы снизить стоимость владения, увеличить производительность под конкретную задачу и упростить наладку и запуск в работу робота. Чтобы начать разбираться в этом всем многообразии промышленной робототехники, давайте рассмотрим основные типы роботов и их функции.
Шарнирные роботы
Шарнирные роботы в работе напоминают движение человеческой руки, они состоят из вращательных кинематических пар и имеют от 4 до 6 управляемых осей. Такая конструкция позволяет шарнирным роботам выполнять пространственные перемещения со сложной траекторией. Примерами задач, с которыми на ура справятся шарнирные роботы, являются: контурная сварка или фрезеровка, а также окрашивание сложных поверхностей, таких как например автомобильный кузов. Также их применяют для большинства задач pick & place. Однако существует мнение, что функционал шарнирных роботов для этих задач зачастую избыточен. Монтаж шарнирного робота чаще всего производится напольный, однако встречаются варианты монтажа на стену или потолок. Радиус действия шарнирных роботов может достигать до нескольких метров, а грузоподъёмность более 1 тонны.
Также их применяют для большинства задач pick & place. Однако существует мнение, что функционал шарнирных роботов для этих задач зачастую избыточен. Монтаж шарнирного робота чаще всего производится напольный, однако встречаются варианты монтажа на стену или потолок. Радиус действия шарнирных роботов может достигать до нескольких метров, а грузоподъёмность более 1 тонны.
Декартовы и портальные роботы
Декартовы роботы имеют, как правило, три линейные оси управления. Каждая из этих осей находится под прямым углом к двум другим. Если одно из звеньев, которое совершает горизонтальное перемещение, имеет поддержку на обоих концах звена, то такой декартов робот называется портальным. Так как декартовы роботы имеют только линейные перемещения, то разработчикам достаточно просто написать программу для перемещения манипуляторов в любую точку пространства, используя несложные тригонометрические функции. Характеристики портальных роботов могут быть совершенно разнообразными и зависят от выбранных линейных сервоприводов и механической части.
Дельта-роботы
Дельта-роботы – это один из видов параллельных роботов, отличительной особенностью которых является треугольная платформа с тремя шарнирными рычагами. Именно из-за треугольной платформы робот получил свое название, так как визуально она похожа на букву греческого алфавита «Δ – дельта». Особенностью является использование параллелограммов в конструкции манипулятора, что позволяет сохранять пространственную ориентацию исполнительного устройства робота. Основным преимуществом дельта-роботов является их высочайшая скорость перемещения за счет минимальной инерции.
SCARA-роботы
Роботы — манипуляторы типа SCARA (Selective Compliance Articulated Robot Arm) — это манипуляторы с селективной гибкостью. Конструктивно они жесткие в вертикальной плоскости, то есть вдоль оси Z, при этом в горизонтальной плоскости (по осям X и Y) обладают податливостью. Такие роботы часто выполняют сборочные операции. Роботы типа SCARA могут работать быстрее, чем декартовые роботы, и имеют небольшие габариты, но они могут быть более дорогостоящими. Применение SCARA роботов особенно выгодно для сборки узлов, где робот должен вкладывать одни детали в другие, при этом, не соединяя их. Важным является то, что благодаря своей конструкции, манипулятор может вытянуться, распрямив «локоть», а может свернуться, освободив занимаемое пространство. Это удобно при работе в ограниченном пространстве, и когда детали перемещаются из одного производственного модуля в другой.
Применение SCARA роботов особенно выгодно для сборки узлов, где робот должен вкладывать одни детали в другие, при этом, не соединяя их. Важным является то, что благодаря своей конструкции, манипулятор может вытянуться, распрямив «локоть», а может свернуться, освободив занимаемое пространство. Это удобно при работе в ограниченном пространстве, и когда детали перемещаются из одного производственного модуля в другой.
Мобильные роботы
Мобильные роботы (роботы для транспортировки материалов, складирования, обслуживания станков) в настоящее время активно развиваются. Внедрение в них датчиков и средств навигации в сочетании с развитым алгоритмическим обеспечением обеспечивают их высокой скоростью и гибкостью применения. Они могут быть интегрированы в другие системы, обладающие возможностью движения, и иметь свою автономную систему навигации. Например, автономные роботы способны тянуть за собой группу тележек и удерживать грузы. Они работают с разными типами пневматических тягово-сцепных соединителей. Оборудованы функциями безопасности, которые позволяют мобильному роботу автономно и безопасно перемещаться по территории производственных помещений.
Оборудованы функциями безопасности, которые позволяют мобильному роботу автономно и безопасно перемещаться по территории производственных помещений.
Дроны
Дроны — это летающие аппараты с дистанционным управлением (то есть на самом деле они не совсем роботы). В более широком смысле — это мобильные, автономные аппараты, запрограммированные на выполнение каких-либо задач. Они применяются для промышленных приложений, таких как проверка безопасности, в целях мониторинга и для научных исследований, в опасных зонах, на пересеченной местности. В настоящее время такие аппараты могут использоваться под водой и в воздухе. Внедрение в них возможности работать автономно позволит этим мобильным роботам самостоятельно формировать и посылать отчеты или самим выбирать команды управления по мере необходимости.
Коллаборативные роботы
Коллаборативные роботы оснащены датчиками, ограничивающими усилие и/или скорость звеньев, и, в зависимости от применения, могут работать в непосредственной близости от человека без установки защитного ограждения. Пока такие роботы были в основном шарнирного типа, но подобные датчики могут быть применены и к обычным роботам. Эта технология развивается быстрее, чем робот проходит сертификацию на соответствие стандартам безопасности. Некоторые из таких роботов могут быть «двурукими», чтобы лучше копировать манипуляционные способности человека и легче интегрироваться в существующий производственный процесс без необходимости его перестраивать. Адаптивная точность коллаборативных роботов позволяет им эффективно работать в полу структурированных средах, используя встроенную систему машинного зрения.
Пока такие роботы были в основном шарнирного типа, но подобные датчики могут быть применены и к обычным роботам. Эта технология развивается быстрее, чем робот проходит сертификацию на соответствие стандартам безопасности. Некоторые из таких роботов могут быть «двурукими», чтобы лучше копировать манипуляционные способности человека и легче интегрироваться в существующий производственный процесс без необходимости его перестраивать. Адаптивная точность коллаборативных роботов позволяет им эффективно работать в полу структурированных средах, используя встроенную систему машинного зрения.
Сферы применения промышленных роботов — виды и классификация
Уже стало привычным использование производственных роботов для сварки, для укладки на паллеты или фасовки.
А ведь применение промышленных роботов значительно шире. Все что может сделать рука человека может повторить манипулятор своей механической рукой. А иногда робот может и больше. Ни один человек не поднимет груз в 1000 кг. А такие автоматизированные машины есть.
А такие автоматизированные машины есть.
В промышленности роботы широко применяются для процессов сварки, перемещения изделий, механической обработки, окраски, сборки и т.д
Рассмотрим некоторые нестандартные применения различных типов:
Робот для тестирования:
Компания Volvo начала разработку систем безопасности, чтобы защитить людей на случай ДТП, связанных со съездом автомобиля с дороги.
Проведение необходимых тестов на реальных автомобилях было признано очень затратным и найдено альтернативное решение, совместно со шведским производителем промышленных машин АВВ.
Промышленный робот тяжелой серии был запрограммирован на движения имитирующие случаи съезда автомобиля с дороги. Что позволило проводить тесты и получить необходимые статистические данные о поведении тела человека в этот момент.
И вот аналогичный тест на автомобиле.
Компания «ДС-Роботикс» предлагает современные промышленные роботизированные системы, подходящие для самых разных производственных задач. К услугам клиентов — надежная техника для автоматизации процесса производства, направленная на решение задач, от резки, сборки, укладки, упаковки, окраски и до профессионального выполнением сварочных работ.
К услугам клиентов — надежная техника для автоматизации процесса производства, направленная на решение задач, от резки, сборки, укладки, упаковки, окраски и до профессионального выполнением сварочных работ.
Зачем нужны промышленные роботы
Роботизированные помощники производственного назначения в последние годы применяются достаточно активно. И это отнюдь не удивительно. Промышленные манипуляторы работают без перерывов, отпусков и выходных и более экономично с позиции расходов. Тогда как люди устают, болеют, нуждаются в перерывах, отдыхе и заработной плате.
В большинстве случаев автоматизированные машины заменяют усилия как минимум нескольких специалистов. Они не требуют постоянного контроля за работой и делают процесс более качественным, быстрым и главное постоянным. Если человек может допустить ошибку, опоздать или уйти, то техника всегда функционирует и обеспечивает высокие показатели труда.
Таким образом, инвестиции в приобретение промышленных роботов для производства оказываются очень перспективными.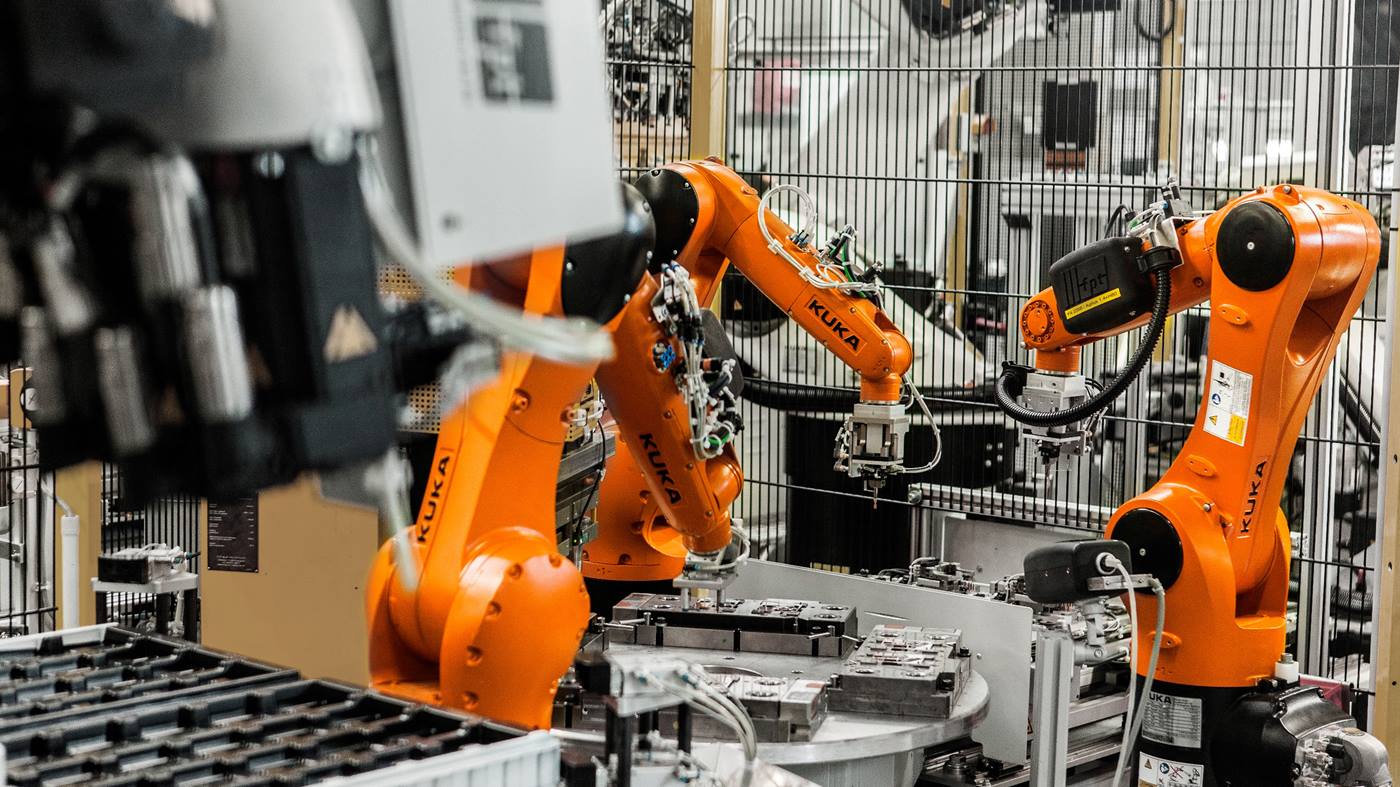 Приобретение такого роботизированного помощника значительно упростит производственный процесс различным предприятиям, например, занятым в сфере производств: машиностроительного, пищевого, деревообработки, строительства, фармацевтики и металлургии.
Приобретение такого роботизированного помощника значительно упростит производственный процесс различным предприятиям, например, занятым в сфере производств: машиностроительного, пищевого, деревообработки, строительства, фармацевтики и металлургии.
Даже компаниям с ограниченным бюджетом следует серьезно задуматься о том, покупке промышленного робота, хотя, цена в Москве на них довольно высокая, зато в дальнейшем затраты окупятся сполна.
Большой выбор промышленных роботов
Для тех организаций, кто собирается купить промышленные роботы уже сейчас, мы предлагаем направить запрос на проработку к нашим специалистам. В большинстве случаев стандартное решение не совсем подходит, мы подготовим предложение именно для вашего производства. Наши сотрудники с удовольствием помогут выбрать технику и проконсультируют по интересующим вопросам. Компания «ДС-Роботикс» — это техника от известных производителей, брендов ABB и KUKA, преимущества которой проверены временем.
Специалисты «ДС-Роботикс» помогут провести экспертизу вашего предприятия и предложить роботизацию вашим призводственных мощностей. В конечном итоге ваша компания получит надежное оборудование, которое может работать по 24 часа и которому не требуется частое сервисное обслуживание.
В конечном итоге ваша компания получит надежное оборудование, которое может работать по 24 часа и которому не требуется частое сервисное обслуживание.
Для вас — простые в управление, безопасные и максимально эффективные в использовании практически в любой промышленности роботизированные системы. Это машины, способные успешно решать любые задачи и вывести вашего производство на современный уровень.
Высокое качество
Продуманность решений, качественная компонентная база и опыт сотрудников — вот ключевые показатели, определяющие выбор клиентов в пользу оборудования от «ДС-Роботикс». Заказчики традиционно высоко оценивают наши роботизированные комплексы и часто обращаются повторно для роботизации следующих участков.
Проектирование и производство роботизированных комплексов, пусконаладка и программирование, сервисное обслуживание и поставка запчастей — все это Вы получаете, воспользовавшись нашими услугами.
Роботы в промышленности — их типы и разновидности / Хабр
Что это?
Это статья об индустриальном применении робототехники. Применение роботов в промышленности началось, по историческим меркам, не так давно — чуть больше, чем полвека назад, но сейчас уже мало какое производство можно представить себе без автоматических линий, без стальных
Применение роботов в промышленности началось, по историческим меркам, не так давно — чуть больше, чем полвека назад, но сейчас уже мало какое производство можно представить себе без автоматических линий, без стальных
манипуляторов
и зорких стеклянных зрачков роботов — эти железные ребята прочно вошли в большинство производственных процессов и уходить не собираются.
Несмотря на такое обширное, почти повсеместное распространение роботов, лишь специалисты в полной мере представляют себе весь спектр их возможностей. В этой статье мы приоткроем дверь в мир промышленной робототехники для широкого круга читателей: опишем некоторые разновидности производственных роботов и сферы их применения. Нельзя объять необъятное в одной статье, но, если читателям будет интересно, мы обязательно продолжим.
Так какие они бывают — роботы?
Есть несколько классификаций промышленных роботов: по типу управления, по степени мобильности, по области применения и специфике совершаемых операций.
По типу управления:
Управляемые роботы: требуют, чтобы каждым их движением управлял оператор. В силу узости областей применения распространены мало. Да и не совсем роботы.
Автоматы и полуавтономные роботы: действуют строго по заданной программе, зачастую не имеют сенсоров и не способны корректировать свои действия, не могут обойтись без участия рабочего.
Автономные: могут совершать запрограммированный цикл действий без участия человека, согласно заданным алгоритмам и корректируя свои действия по мере необходимости. Такие роботы способны полностью перекрыть поле деятельности на своем участке конвейера, без привлечения живой рабсилы.
По функциям и сфере применения:
Роботы разделяются по назначению и исполняемым функциям, вот лишь некоторые из них: промышленные роботы бывают универсальные,
сварочные
, машиностроительные, режущие, комплектовочные, сборочные, упаковочные, складские, малярные.
Это далеко не полный перечень: количество всевозможных вариантов постоянно растет и все перечислить невозможно в рамках одной статьи. Можно лишь с уверенностью сказать о том, что вряд ли найдется такая область человеческой деятельности, где роботы не смогли бы сделать труд человека более творческим, взяв всю монотонную и опасную часть работы на себя.
Можно лишь с уверенностью сказать о том, что вряд ли найдется такая область человеческой деятельности, где роботы не смогли бы сделать труд человека более творческим, взяв всю монотонную и опасную часть работы на себя.
Другие методы классификации
У каждой энциклопедии, каждого справочника и каждого производителя своя классификация и типология роботов. Что и не удивительно — зачастую она определяется сугубо специфическими нуждами и частным подходом того, кто её составляет.
Помешает ли это нам рассмотреть некоторые образцы и понять — что же они умеют? Нет конечно. Поехали.
Рассмотрим образцы
Среди промышленных роботов выделяется продукция таких известных фирм, как Kuka, Fanuc, Universal Robots, некоторые образцы которых мы рассмотрим чуть ниже.
KUKA KR QUANTEC PA Arctic
KUKA KR QUANTEC PA
— один из лучших роботов-палетоукладчиков на рынке.
KUKA KR QUANTEC PA Arctic
— его модификация, робот функционирующий при экстремально низких температурах. Он создан для работы преимущественно в морозильных камерах, при температурах до -30 °C. Электронные и механические части аппарата не нуждаются в защите от мороза, снега, инея, а также не выделяют излишнего тепла. Радиус действия манипулятора модификации Арктик, как и у стандартного KUKA KR QUANTEC PA, составляет 3195 мм, а полезная нагрузка — до 240 кг. Аппарат идеален для применения в пищевой промышленности и в условиях крайнего севера. Кроме составления штабелей из паллетов, робот может выполнять и другие манипуляции, ведь точность его движений, а точнее говоря — стабильность повторяемости позиционирования, составляет 0,06 мм.
Он создан для работы преимущественно в морозильных камерах, при температурах до -30 °C. Электронные и механические части аппарата не нуждаются в защите от мороза, снега, инея, а также не выделяют излишнего тепла. Радиус действия манипулятора модификации Арктик, как и у стандартного KUKA KR QUANTEC PA, составляет 3195 мм, а полезная нагрузка — до 240 кг. Аппарат идеален для применения в пищевой промышленности и в условиях крайнего севера. Кроме составления штабелей из паллетов, робот может выполнять и другие манипуляции, ведь точность его движений, а точнее говоря — стабильность повторяемости позиционирования, составляет 0,06 мм.
FANUC M-2000iA/1200
FANUC M-2000iA/1200
— пятиосевой грузоподъемный робот поднимающий до 1200 кг и перемещающий этот груз на расстояние до 3,7 м — идеален в качестве погрузчика, так как работает без участия человека, что практически сводит к нулю опасность травматизма. Работает при температурах 0°C — +45 °C. Стабильность повторяемости — 0,03 мм.
Крайне прочный аппарат.
Universal Robots — UR10
UR10
— самый крупный из манипуляторов Universal Robots и это коллаборативный робот, проще говоря — он создан для работы с другим оборудованием и помощи в работе человеку.
Манипулятор модели UR10 имеет радиус действия 1,3 м и поднимает груз до 10 кг. Его можно использовать с сельскохозяйственным, фармацевтическим, технологическим и многим другим оборудованием. Компактно размещается на рабочем месте человека, чтобы стать ему “третьей рукой”, легко программируется и быстро настраивается.
UR10 умеет завинчивать, клеить, сваривать и паять, производить литьевые и сборочные работы.
Также роботы Universal Robots применены в проекте Voodoo Manufacturing: Project Skywalker компании Medium Corporation — это фабрика 3D-печати, многие операции на которой выполняют именно роботы-манипуляторы. Такие действия, как замена платформ для печати, сбор и складирование готовых изделий больше не требуют неустанного внимания персонала.
Особенно интересны универсальные роботы, так как именно они, в силу своего назначения, снабжены наиболее адаптивными системами управления.
Rethinkrobotics
Это такие роботы, как Baxter и Sawyer производства Rethinkrobotics.
Baxter — многофункциональный робот с двумя манипуляторами и системами обратной связи и самообучения.
Его 7-осевые манипуляторы способны почти на всё, на что способна рука человека, в том числе — имеют обратную связь и могут контролировать прилагаемые усилия. Это, плюс ещё особенности дизайна, делают Бакстера безопасным для живых рабочих — его рабочее место не нуждается в ограждении, да и вообще — места он занимает немного, что здорово экономит пространство в цеху. Пара бакстеров способна успешно работать вместе.
Бакстер интересен еще и тем, что не требует тщательного подробного программирования каждого своего действия — “учить” его можно не только через интуитивно понятное визуальное приложение, но и прямо на рабочем месте — повторяя показанные движения он запоминает их и применяет в дальнейшем.
Sawyer — “младший брат” Бакстера — удивительно компактный и легкий робот-манипулятор, он весит всего 19 килограмм и может быть установлен почти где угодно, не занимая при этом много места.
Точность действий Сойера доходит до 0,1 мм, что позволяет использовать его в сотнях видов комплектовочных, сборочных и других конвейерных работ.
Оба робота легко переобучаются для выполнения новых функций даже без применения традиционного программирования и столь же просто перемещаются с одного рабочего места на другое.
Гибридное производство
Stratasys Infinite-Build 3D Demonstrator
Очень интересным представляется подход компании Stratasys, которая создала промышленный аппарат нового типа — гибрид робота и 3D-принтера.
Конечно, любой 3D-принтер обладает признаками робота, но тут — это совершенно традиционной формы роботизированный манипулятор, имеющий в том числе и функцию FDM-печати. Stratasys Infinite-Build 3D Demonstrator предназначен, прежде всего, для авиационного и космического производства, в котором так важна его способность производить печать на вертикальных поверхностях неограниченной площади, в соответствии с концепцией “infinite-build” — “бесконечное построение”.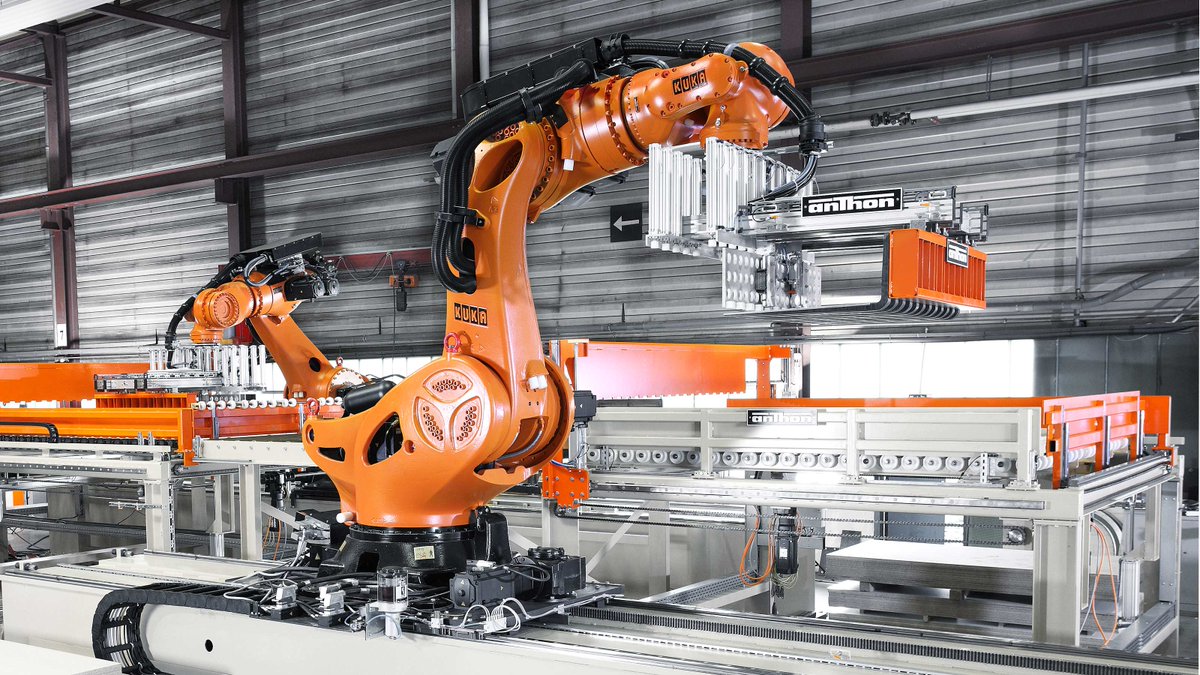 С работой над проектом связаны такие монстры, как аэрокосмический гигант Boeing и автоконцерн Ford, которые предоставили Stratasys спецификации по необходимым характеристикам получаемых изделий.
С работой над проектом связаны такие монстры, как аэрокосмический гигант Boeing и автоконцерн Ford, которые предоставили Stratasys спецификации по необходимым характеристикам получаемых изделий.
Восьмиосевой механизм манипулятора, обилие специально разработанных композитных материалов для печати, традиционно высокое качество изготовления — все говорит нам о том, что у этого аппарата и его потомков большое будущее.
3D Systems — Figure 4
Figure 4
компании 3D Systems — модульная робототехническаяя система для автоматизации стереолитографической 3D-печати, ни больше, ни меньше.
Это целый автоматический комплекс, который способен производить новые изделия каждые несколько минут — в отличие от нескольких часов на обычных SLS-принтерах.
Кроме того, в цикл уже включены и такие этапы, как промывка, отделение поддержек и дозасветка, а не только первичная экспозиция. Все это Figure 4 делает сам, без вмешательства оператора в процесс работы.
Благодаря модульности, на основе Figure 4 можно создать достаточно крупные автоматические линии, используя стандартные компоненты.
Этот комплекс был представлен общественности в этом году, на выставке The International Dental Show в Кёльне, как и новый 3D-принтер ProJet
CJP 260Plus
— полноцветный 3D-принтер предназначенный для анатомического моделирования медицинских изделий и быстрого прототипирования любых промышленных образцов.
Принтер также роботизирован — снабжен системой автоматической загрузки, удаления и переработки печатного порошка.
Можно с уверенностью сказать, что комплексный подход к 3D-печати — часть производственной культуры будущего. Он даст радикально новое сочетание скорости, точности, удобства и снижения себестоимости изделий.
Carbon — Carbon SpeedCell
Carbon SpeedCell — технологическое решение от компании Carbon, которое включает в себя новый 3D-принтер The M2, работающий по технологии CLIP, и финишинговый аппарат для стереолитографических распечаток Smart Part Washer.
CLIP — технология бесслойной стереолитографической печати, обеспечивающая скорость от 25 до 100 раз быстрее обычной SLS и новый уровень качества поверхности.
Система CLIP (Continuous Liquid Interface Production) позволяет получить невозможные ранее формы изделий требующие минимальной постобработки. Точных характеристик аппаратного комплекса производитель пока не предоставил, но сам подход уже радует — это почти готовое решение для любой мастерской, в которой требуется стереолитографическая печать.
DMG MORI — LASERTEC 65 3D
Аппарат сочетающий в себе несколько разных подходов к обработке деталей: это и классический фрезерный станок с программным управлением — пятиосевой и весьма точный, и лазерный режущий инструмент с теми же степенями свободы, и печатающий металлом 3D-принтер с технологией лазерного напыления. Сложно представить себе операцию, которую не смог бы произвести этот станок с металлической деталью. Гибридный подход: фрезеровка заготовки, наплавление недостающих деталей или печать с нуля и чистовая обработка — все операции могут произведены с деталью за один подход, в рамках одной заданной программы, без прерывания технологического цикла. Размер обрабатываемой и/или печатаемой детали составляет до 600 на 400 мм, а вес может быть до 600 кг.
Размер обрабатываемой и/или печатаемой детали составляет до 600 на 400 мм, а вес может быть до 600 кг.
Такое МФУ для работы по металлу уже многое изменило в культуре производства штучных и мелкосерийных изделий, а в ближайшее время подобный подход может распространиться и на серийное производство.
EOS — Additive Manufacturing
Компания EOS создала манипуляторы, которые способны производить различные операции, где требуется захват и перемещение детали. Разработки EOS в этой области основываются на наблюдениях за поведением животных, в частности — этот манипулятор создан по примеру хобота слона.
Такой робот-манипулятор может быть использован во множестве промышленных операций, как то: в транспортировке и упаковке, в перемещении деталей из одной рабочей зоны в другую, например — из 3D-принтера в камеру пост-обработки, чтобы исключить участие человека на этом этапе.
Вот так он устроен:
Также компания спонсирует и представляет проект Roboy — это мобильный гуманоидный робот, который способен выполнять любые движения свойственные человеку и служить помощником на производстве.
Concept Laser и Swisslog — M Line Factory
Известный производитель печатающих металлом 3D-принтеров, Concept Laser заключил соглашение с компанией Swisslog, их общий проект — M Line Factory, это система перемещения металлических 3D-печатных деталей между станками Concept Laser с помощью роботов Swisslog.
Компании продолжают совершенствование аппаратных комплексов для 3D-печати металлом. Роботизированные составляющие этих машин способны провести деталь через весь цикл — от загрузки проекта в память, до выхода готового изделия на склад, — без необходимости вмешательства оператора.
Additive Industries — The MetalFAB1
Единственная в своем роде установка — единая система для печати, транспортировки из рабочей камеры и хранения готовых деталей. Фактически — готовый цех металлической 3D-печати в одном корпусе.
Существуют роботы, которые способны выполнять функции сварочных и фрезерных станков c программным управлением.
А также такие, которые обслуживают традиционные фрезерные ЧПУ-станки, увеличивая их производительность.
Например, вот так это делает упомянутый выше Sawyer:
Выводы
Роботы в современной промышленности везде. Они в любом цеху и в любой области производства. И это нормально: роботы экономят деньги работодателей, а рабочих спасают от вредной и монотонно-отупляющей работы; роботы работают круглосуточно и безостановочно; роботы намного точнее живых рабочих — они не устают, у них не “замыливается глаз”, их сенсоры и системы позиционирования способны сохранять точность до сотых долей миллиметра.
Пока мы видим их еще не везде — многие производственные процессы скрыты от рядового пользователя, да и не особо интересны обычно, — но совсем скоро невозможно будет не замечать того, что подавляющая часть всех материальных благ производится умными машинами.
»
Хотите больше интересных новостей из мира 3D-технологий?
Подписывайтесь на нас в соц. сетях:
Подписывайтесь на наш телеграм-канал с отборными кейсами роботизации и автоматизации со всего мира: https://tglink. ru/easy_robotics
ru/easy_robotics
Нетипичное использование промышленных роботов
Нетипичные варианты использования промышленных роботов — Промышленные роботы
Классические варианты применения промышленных робот известны — это сварка, резка, штамповка, окраска, сборка. Эти профессии промышленные роботы освоили уже несколько десятилетий назад. В «десятые» годы заметн тренд на рост разнообразия применения промышленных манипуляторов. Особенно этому способствовало появление коботов, коллаборативных роботов. В этой публикации собрано немало примеров нетипичного для начала века использования роботов.
Коммерческое использование или демонстрация потенциала необычного использования
3D-печать
2017.02.09 Как сделать 3D-печать быстрой и точной. 3D-печать из пластика с использованием промышленного манипулятора и технического зрения. Заявлено существенное ускорение процесса при достаточно высокой точности.
2015.12.24 Glass Robotics Lab: создание изделий из стекла с помощью роботов и 3D-технологий.
3D-печать с помощью промышленного робота (бетон, сталь, пластик и т.п.) — много примеров
Авиация — мытье самолетов
2021.06.30 Американский производитель автоматизированных решений Wilder Systems представил роботизированную мойку для самолетов, ускоряющую процесс на 95% и исключающую ручной труд. Интерфейс канадской компании RoboDK обеспечивает интуитивное программирование задач и не требует от сотрудников опыта взаимодействия с роботизированными системами. За мытье в этой системе отвечают два 6-осевых промышленных роботов FANUC, ПО состоит из интерфейса RoboDK, интегрированного с Autodesk Fusion 360. / RoboTrends.ru
Авиация — раскраска самолетов
2019. В Германии создан робот ARP для нанесения на самолеты узоров любой сложности. Система на базе промышленного манипулятора Yaskawa с помощью пескоструйного аппарата готовит поверхность самолета к покраске, удаляя грязь и старые слои краски. Затем робот грунтует поверхность, наносит новые слои краски и просушивает рисунок. Если до сих пор на покраску лайнера уходило до 2 недель труда бригады людей, то с помощью робота, время работы сократится примерно до 5 суток.
Система на базе промышленного манипулятора Yaskawa с помощью пескоструйного аппарата готовит поверхность самолета к покраске, удаляя грязь и старые слои краски. Затем робот грунтует поверхность, наносит новые слои краски и просушивает рисунок. Если до сих пор на покраску лайнера уходило до 2 недель труда бригады людей, то с помощью робота, время работы сократится примерно до 5 суток.
Авиация — пилотирование
2017.05.19 Робот ALIAS посадил Boeing 737 без помощи человека / Universal Robots
2016.10.19 По заказу DARPA компания Aurora Flight Sciences разрабатывает в рамках проекта ALIAS робота — второго пилота, который сможет летать на любых типах самолетов и вертолетов. / RoboTrends.ru . Применить хотят коллаборативного робота.
Археология: помощь археологу в очистке находок
2015.08.07 Роботы-археологи: железная рука помощи.
Глажка ткани
2016.02.22 Платформу Baxter задействовали для глажки ткани специалисты Колумбийского университета США.
Гостиничное дело — работа с индивидуальными «сейфами»
2016.02.29 Yobot используется в отелях Yotel для доступа к «сейфам» с ценными вещами гостей.
2015.09 Как ФАМ-Роботикс научила робота обувь показывать. Демонстрация моделей обуви
Деревообработка и роботы
2016.10.09 Промышленные роботы осваивают различные виды работ в области деревообработки. Видео
Еда: варка лапши, ее извлечения и раскладки по тарелкам
2015.05.05 Роботы Foxconn начали готовить лапшу
Еда: изготовление суши
2016.08.15 Промышленного робота научили собирать суши. Такого робота показывает Kawasaki в августе 2016 года.
Камня обработка
Промышленные роботы используют для фигурной распилки камня, а также для его фрезерования.
2020.06 Игнис Машинери представляет комплекс фрезеровки камня на базе робота Kuka KR240R2500 Prime с внешней осью, а также робот KUKA KR360-L240 — для обработки камня алмазным тросом. (ХХ)
(ХХ)
Ландшафтный дизайн — фигурная обработка кустарников
2015.11.23 Презентации. Дмитрий Суворов, Квантум Системс. Высокоточные системы определения координат и ориентации. Опыт обработки объектов промышленным манипулятором из произвольного положения
Медицина
2016.01.30 Робот KUKA поможет лечить колени атлетов. Изучение механизмов травмирования коленного сустава.
2016 Коллаборативный робот UR использовали для ассистирования при проведении нейрохирургической операции.
Мойка фасадов зданий
2017.03.24 Сингапурский OutoBot сможет автоматически вымыть или покрасить здание. Построен на базе коллаборативного робота UR10.
Научные исследования
2016.05.05 Роботы в научном центре Кулхэм поддержат порядок в экспериментальном термоядерном комплексе.
2015.11.06 Роботы ИТЭР. Роботы для реактора (токомака)
Обучение роботехнике и автоматизации
2016. 01.29 Роботы в аудитории: Baxter помогает обучать будущих инженеров
01.29 Роботы в аудитории: Baxter помогает обучать будущих инженеров
Окраска фасадов зданий
2017.03.24 Сингапурский OutoBot сможет автоматически вымыть или покрасить здание. Построен на базе коллаборативного робота UR10.
Производство обуви
2016.08.12 Adidas откроет робо-фабрику в Атланте в 2017 году. Как ожидается, завод с претенциозным названием “Speedfactory” откроется в Атланте, США в 2017 году. Еще год потребуется фабрике для того, чтобы выйти на полные обороты. Предельный годовой выпуск — 50 тысяч пар беговых кроссовок. Для Adidas, цифра весьма скромная, однако речь пойдет уже о втором полностью роботизированном производстве — первое компания создает в Германии.
2016.05 Идет строительство фабрики Adidas в Германии, которая займется производством обуви Adidas с широким использованием промышленных роботов. Это позволило Adidas вернуть производство из Китая на родину. Производство должно начаться уже в 4q2016. Примеру германской компании возможно последует и ее конкурент — Nike.
Примеру германской компании возможно последует и ее конкурент — Nike.
2015 Коллаборативный манипулятор Universal Robots использовали для изготовления кастомизированных шлепанцев Yooshu.
Производство одежды
2016.11.02 Робот-швея от Sewbo оставит без работы десятки миллионов?. Манипулятор Universal Robots задействовали в роботе для автоматизированного пошива одежды. #Sewbo.
Производство самолетов
2016.03.26 На сборочном производстве Boeing промышленные манипуляторы Kuka движутся вдоль фюзеляжа, занимаясь его проклепыванием. Раньше этим занимались люди, зарабатывая производственные заболевания — работу клепальщика легкой не назовешь.
Сортировка белья — из кучи в отдельные контейнеры
2015.05.12 То, о чем давно мечтали… робот Dextrous Blue рассортирует белье.
Съемки (управление движением камеры при съемке)
Используется в кино, рекламе, баллистической экспертизе и т.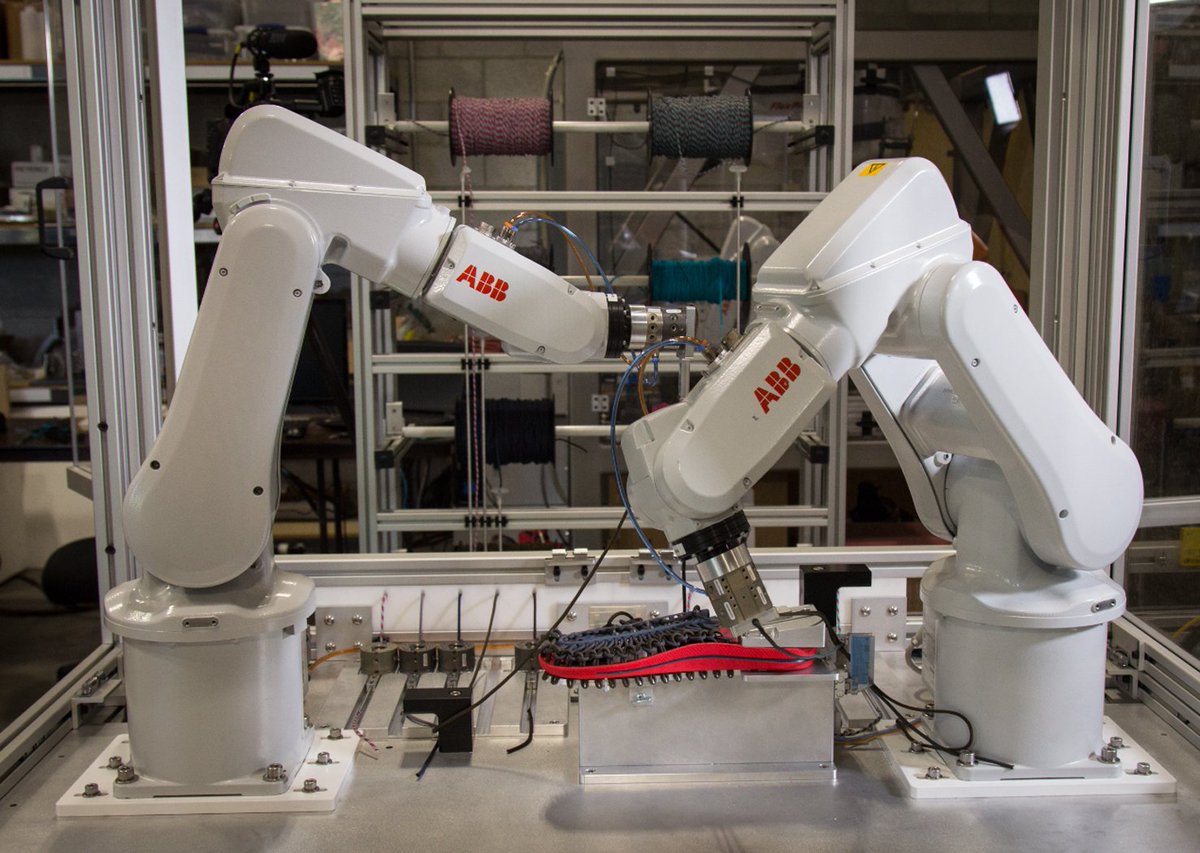 п.
п.
Пример 1 (XX)
Татуировки и роботы
2016.08.06 Французские дизайнеры оснастили промышленный манипулятрор устройством для нанесения тату.
ТВ
2015 Коллаборативный манипулятор Universal Robots использовали для телесъемки футбольных матчей в Европе
Торговля
Chloe, Shoreview / PAR Systems, США — продажа CD-дисков и DVD-дисков
2016.02.29 Промышленный робот — манипулятор задействован в круглосуточном киоске для покупки музыкальных дисков CD и DVD дисков с кинофильмами в магазине Best Buy, США.
2015.09 Как ФАМ-Роботикс научила робота обувь показывать. Демонстрация моделей обуви
Утилизация
2016.11.15 Роботы займутся переработкой старых телевизоров. Граждане Объединенного Королевства все чаще обновляют свои телевизоры, причем на свалки ежегодно попадает почти 2 млн устройств. Выброшенная электроника — один из самых быстрорастущих видов отходов, причем наибольшая доля приходится именно на телевизоры. Впрочем, и из отходов можно извлечь прибыль.
Впрочем, и из отходов можно извлечь прибыль.
2016.04.17 Роботы Liam помогли Apple заработать $45 млн в ходе разборки старых устройств в рамках программы по защите окружающей среды. В частности за 2015 год удалось извлечь из них свыше 1.1 тонны золота. Кроме золота из разбираемых девайсов удается выделить медь, цинк, никель, серебро и другие металлы. Производительность роботов Liam на сегодня — 1.2 млн разобранных iPhone в год, на разборку одной модели и сортировку ее компонентов робот тратит 11 секунд. Прототипы Liam работают в Калифорнии и Нидерландах.
2016.02.23 Робот Liam разорвет iPhone в клочья — разборка смартфонов
Новости нетипичного использования промышленных роботов
2019.03.20 В Германии создан робот ARP для нанесения на самолеты узоров любой сложности. Система на базе промышленного манипулятора Yaskawa с помощью пескоструйного аппарата готовит поверхность самолета к покраске, удаляя грязь и старые слои краски. Затем робот грунтует поверхность, наносит новые слои краски и просушивает рисунок. Если до сих пор на покраску лайнера уходило до 2 недель труда бригады людей, то с помощью робота, время работы сократится примерно до 5 суток. Источник: alphajet.ru
Затем робот грунтует поверхность, наносит новые слои краски и просушивает рисунок. Если до сих пор на покраску лайнера уходило до 2 недель труда бригады людей, то с помощью робота, время работы сократится примерно до 5 суток. Источник: alphajet.ru
2018.09.17 Промышленный робот создает картины в стиле стринг-арт. / RoboTrends.ru
2017.05.19 Робот ALIAS посадил Boeing 737 без помощи человека / RoboTrends.ru
2016.10.09 Промышленные роботы осваивают различные виды работ в области деревообработки. Видео
2016.11.15 Роботы займутся переработкой старых телевизоров. Граждане Объединенного Королевства все чаще обновляют свои телевизоры, причем на свалки ежегодно попадает почти 2 млн устройств. Выброшенная электроника — один из самых быстрорастущих видов отходов, причем наибольшая доля приходится именно на телевизоры. Впрочем, и из отходов можно извлечь прибыль.
2016.11.02 Робот-швея от Sewbo оставит без работы десятки миллионов?. Манипулятор Universal Robots задействовали в роботе для автоматизированного пошива одежды. #Sewbo.
Манипулятор Universal Robots задействовали в роботе для автоматизированного пошива одежды. #Sewbo.
2016.10.19 По заказу DARPA компания Aurora Flight Sciences разрабатывает робота — второго пилота, который сможет летать на любых типах самолетов и вертолетов. Используется манипулятор Universla Robots. / RoboTrends.ru
2016.08.15 Промышленного робота научили собирать суши. Такого робота показывает Kawasaki в августе 2016 года.
2016.08 Французские дизайнеры оснастили промышленный манипулятрор устройством для нанесения тату.
2016.05 Идет строительство фабрики Adidas в Германии, которая займется производством обуви Adidas с широким использованием промышленных роботов. Это позволило Adidas вернуть производство из Китая на родину. Производство должно начаться уже в 4q2016. Примеру германской компании возможно последует и ее конкурент — Nike.
2016.05.05 Роботы в научном центре Кулхэм поддержат порядок в экспериментальном термоядерном комплексе.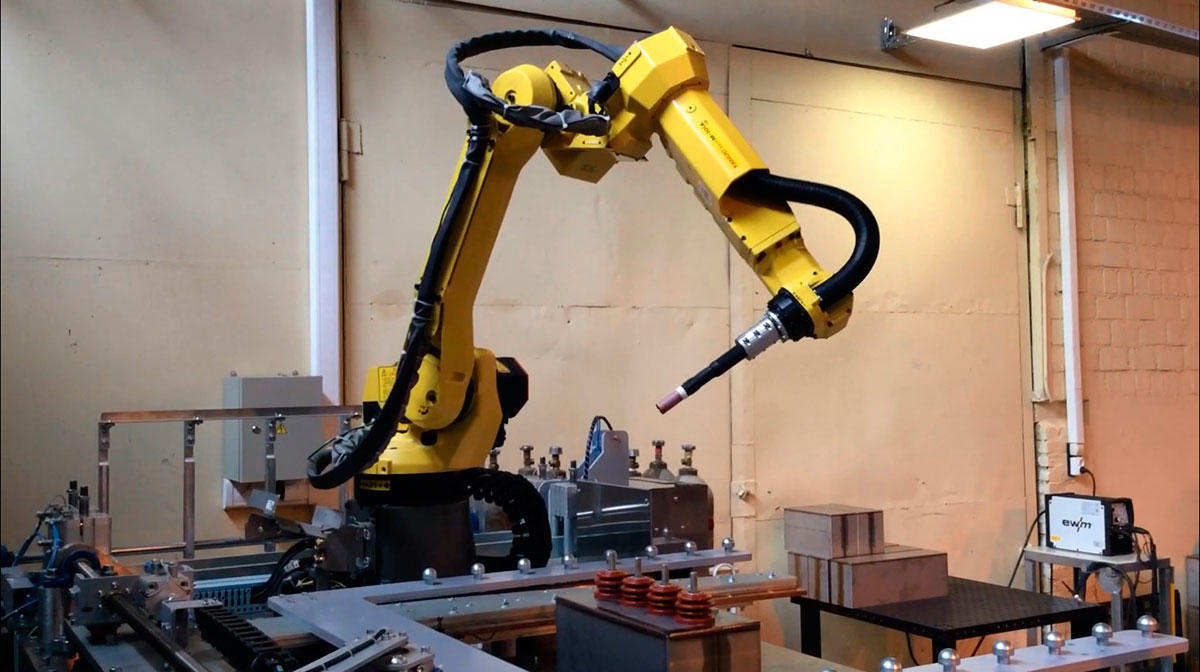 Чтобы задействовать роботов в зоне, где действуют высокие температуры и есть радиации, нужно обеспечить особенную защиту его электрических цепей. К тому же ученым следует заранее продумать, что они будут делать, если такой робот выйдет из строя — ведь нужно будет его срочно починить или заменить. Не менее сложные требования предъявляются к системе управления робота.
Чтобы задействовать роботов в зоне, где действуют высокие температуры и есть радиации, нужно обеспечить особенную защиту его электрических цепей. К тому же ученым следует заранее продумать, что они будут делать, если такой робот выйдет из строя — ведь нужно будет его срочно починить или заменить. Не менее сложные требования предъявляются к системе управления робота.
2016.04.17 Роботы Liam помогли Apple заработать $45 млн в ходе разборки старых устройств в рамках программы по защите окружающей среды. В частности за 2015 год удалось извлечь из них свыше 1.1 тонны золота. Кроме золота из разбираемых девайсов удается выделить медь, цинк, никель, серебро и другие металлы. Производительность роботов Liam на сегодня — 1.2 млн разобранных iPhone в год, на разборку одной модели и сортировку ее компонентов робот тратит 11 секунд. Прототипы Liam работают в Калифорнии и Нидерландах.
2016.02.29 Yobot используется в отелях Yotel для доступа к «сейфам» с ценными вещами гостей.
2016.02.29 Промышленный робот — манипулятор задействован в круглосуточном киоске для покупки музыкальных дисков CD и DVD дисков с кинофильмами в магазине Best Buy, США.
2016.02.22 Платформу Baxter задействовали для глажки ткани специалисты Колумбийского университета США.
2016.01.30 Робот KUKA поможет лечить колени атлетов
2016.01.29 Роботы в аудитории: Baxter помогает обучать будущих инженеров
2015.12.24 Glass Robotics Lab: создание изделий из стекла с помощью роботов и 3D-технологий.
2015.11.23 Презентации. Дмитрий Суворов, Квантум Системс. Высокоточные системы определения координат и ориентации. Опыт обработки объектов промышленным манипулятором из произвольного положения
2015.11.06 Роботы ИТЭР. Роботы для проектируемого токомака.
2015.05 Робот помощник археолога был представлен на международной выставке в мае 2015 года. Выполненый на основе промышленного робота — манипулятора KUKA LBR iiwa, помощник археолога способен снимать грунт и проводить очистку окаменелостей, склейку деталей, выемку фрагментов. Среди достоинств робота — способность неутомимо совершать мельчайшие движения кистями и скребками в круглосуточном режиме. Робот также умеет фотографировать все участки фрагмента в HD-формате, фиксировать изменения, проводить радиоуглеродный анализ. 2015.08.07 Роботы-археологи: железная рука помощи
Среди достоинств робота — способность неутомимо совершать мельчайшие движения кистями и скребками в круглосуточном режиме. Робот также умеет фотографировать все участки фрагмента в HD-формате, фиксировать изменения, проводить радиоуглеродный анализ. 2015.08.07 Роботы-археологи: железная рука помощи
2015.07.06 Промышленный робот напечатает дизайнерскую мебель из пластика. #Галатея
2015.05.12 То, о чем давно мечтали… робот Dextrous Blue рассортирует белье.
Промышленные роботы — устройство, виды, области применения
Промышленные роботы — это настоящее и будущее производственных объектов. Их внедрение полностью оправдано: механизмы легко заменяют человека при выполнении рутинных работ, производят порученные манипуляции с высокой точностью, снижают издержки. При применении промышленных роботов затраты на покупку окупаются спустя 2-4 года после установки, а работает оборудование намного дольше — десятилетиями.
Устройство современных промышленных роботов
Роботизированные установки — это автоматизированные устройства, выполняющие заданные действия. Различные разновидности оборудования конструктивно отличаются. Но есть и общие механические узлы:
Различные разновидности оборудования конструктивно отличаются. Но есть и общие механические узлы:
-
Манипулятор. Отвечает за двигательные функции. Состоит из подвижных элементов, выполняющих одно действие или определенный набор. Движения могут быть поступательными, вращательными и выполняться в различных системах координат. -
Рабочий орган. Предназначен для выполнения основной технологической операции. Это определенный инструмент или особый механизм для его прикрепления. -
Привод. Передает манипулятору движение. Современные аппараты оснащены приводами электрического типа, но встречается также оборудование с гидравлическими или пневматическими. -
Блок управления. Элемент, при помощи которого задается программа, обеспечивается интеграция с общей системой управления производством.
Агрегаты оснащаются внутренними и внешними датчиками, образующими информационно-сенсорную систему. Они необходимы для получения данных об окружающей среде и местонахождении обрабатываемых элементов.
Они необходимы для получения данных об окружающей среде и местонахождении обрабатываемых элементов.
Виды промышленных роботов
Классифицируют агрегаты по разнообразным критериям. Базовый — тип управления. Выделяют:
-
программные — выполняют заданный алгоритм без учета внешних факторов; -
адаптивные — оснащаются датчиками, считывающими особенности окружающей среды и выбирающими в соответствии с полученными показателями подходящую программу среди заданных; -
обучаемые — позволяют оператору корректировать заданную программу в зависимости от особенностей производства; -
интеллектуальные — самостоятельно меняют алгоритм действий после считывания условий и их анализирования.
Различаются аппараты и по технологическим параметрам. В зависимости от грузоподъемности выделяют следующие виды: легкие — работают с весом до 10 кг (YASKAWA MOTOMAN MPP3S), средние — 11-200 кг (YASKAWA MOTOMAN AR2010), тяжелые — от 200 кг (YASKAWA MOTOMAN GP400).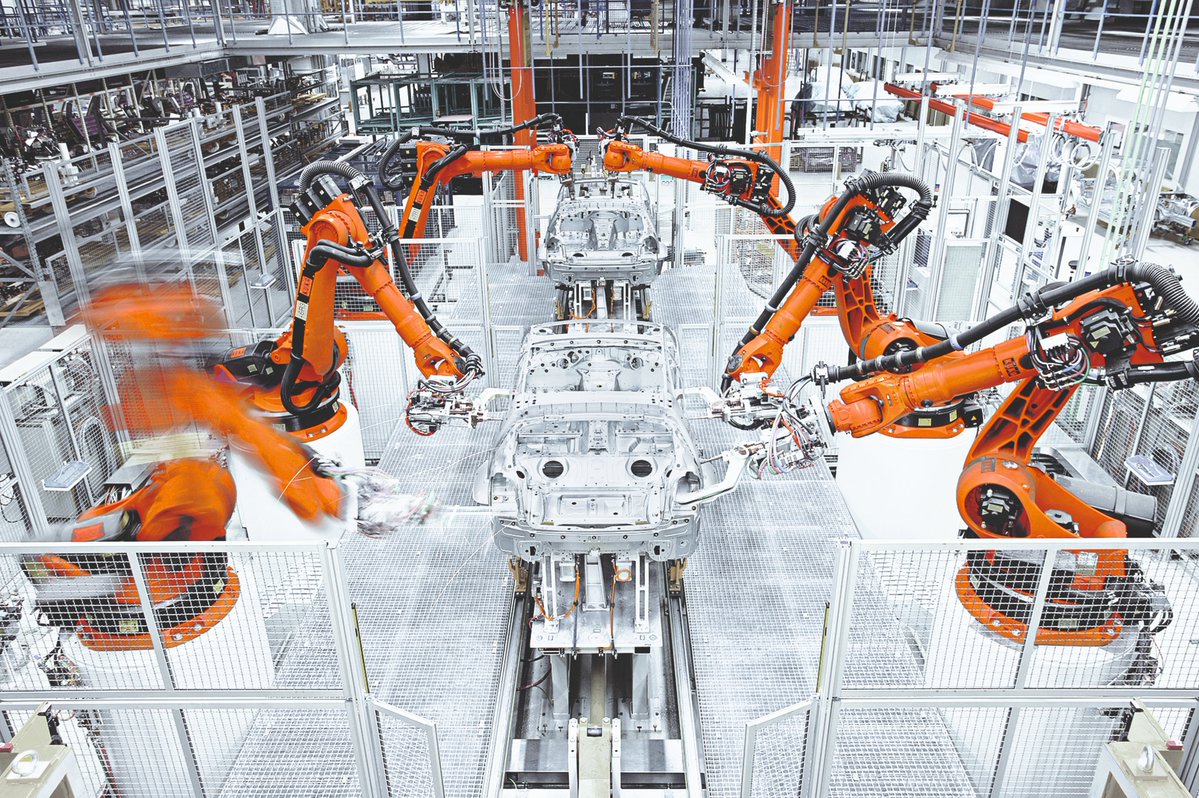
Еще один классификационный признак — назначение промышленного робота. Машина может быть:
-
универсальной — производить различные манипуляции; -
специализированными — для определенного набор операций; -
специальными — для выполнения одной функции, либо работ в специальных условиях.
Чтобы обеспечить максимальную производительность, важно учитывать тип промышленных роботов и параметры еще на этапе подбора.
Сферы и области применения промышленных роботов
Промышленные роботы можно использовать в самых различных сферах. Они востребованы в металлургии, пищевой и химической промышленности, машиностроении. Востребованность технологически сложных приборов обусловлена широким спектром задач, которые они выполняют:
-
погрузка и разгрузка товаров, в том числе загрузка автоматических линий; -
комплектование; -
сортировка продукции; -
выявление брака; -
маркировка; -
фрезировка; -
заливка металлов; -
резка; -
шлифовка; -
переработка сырья.

На производствах, которые предусматривают работу с металлами, создание машин, иных механизмов и деталей, популярностью пользуются сварочные комплексы. Современные аппараты с широким радиусом действия и большой грузоподъемностью способны производить высокоточные манипуляции, создавая даже сложные соединения.
В складских помещениях, а также на производствах при подготовке готовой продукции к транспортировке, не обойтись без комплексов паллетирования. Подобные роботизированные установки способны быстро осуществлять укладку по сложным схемам, легко перенастраиваются на новый вид товаров или технологию выкладки.
Преимущества внедрения промышленных роботов
Использование промышленных роботов — это прямой путь к:
-
снижению расходов, в том числе за счет сокращения штата — устройство заменяет минимум 2-3 сотрудников; -
снижению брака; -
уменьшению количества отходов; -
увеличению объемов выпуска продукции; -
повышению качества выполняемых работ и выпускаемых изделий; -
облегчению условий труда работников.

Современные машины легко программируются, перепрограммируются, а также интегрируются с уже имеющимися системами. Они компактны, отличаются точностью, не требуют постоянного контроля и способны выполнять даже сложные задачи, что делает их незаменимыми в ходе производственного процесса.
Опасные виды производства | ROBOMATIC Промышленные роботы и автоматизация производства
При работе с токсичными, едкими, легковоспламеняющимися и взрывчатыми веществами последствия человеческой ошибки, невнимательности или усталости могут быть фатальными, не говоря уже о вредном воздействии на работников самой производственной среды.
Внедрение промышленных роботов – это очевидное направление развития для предприятий, производящих опасную продукцию. Роботы позволяют с высокой точностью и надежностью выполнять различные операции с опасными материалами в полностью автономном режиме без участия человека. Для работы с опасными материалами созданы специальные серии промышленных роботов, имеющих повышенную защиту по классу IP, полную герметизацию механических соединений и электрических контактов, а также имеющих более продвинутую систему управления, снабженную модулями, которые отвечают за безопасность работы.
Также использование полностью автоматизированных роботизированных производственных линий позволит повысить степень контроля над производством и исключить возникновение аварийных или опасных ситуаций. Также применение роботов позволит существенно снизить затраты предприятия на оплату труда и социальные отчисления, а также затраты связанные с обеспечением приемлемых для человека условий труда.
Роботы могут выполнять различные задачи на опасных производствах:
- Паллетизация и депаллетизация материалов и готовой продукции
- Упаковка продукции
- Сортировка продукции
- Маркировка и нанесение этикеток
- Обслуживание производственных линий
- Сборка изделий
Компания «Альфа Инжиниринг» рада предложить своим клиентам решения по автоматизации производственных процессов с высоким уровнем опасности для персонала с применением промышленных роботов. Поставляемые нашей компанией робототехнические комплексы «Robomatic» предназначены для решения широкого спектра задач при автоматизации промышленных производств.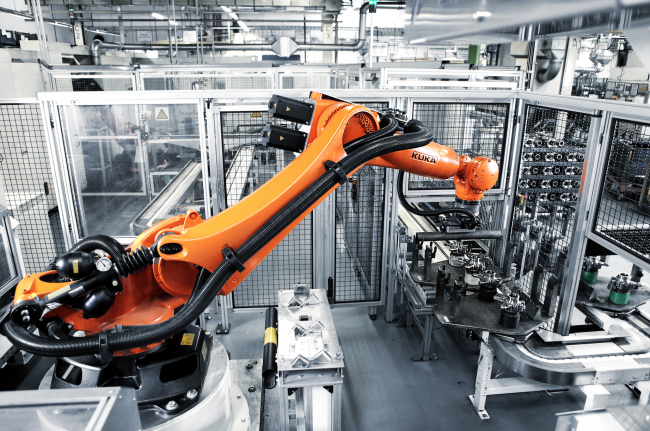 Основой для комплексов «Robomatic» являются надежные и производительные роботы от компании FANUC – мирового лидера на рынке промышленной робототехники.
Основой для комплексов «Robomatic» являются надежные и производительные роботы от компании FANUC – мирового лидера на рынке промышленной робототехники.
4 типа роботов, которые должен знать каждый производитель
Эта статья впервые появилась на IndustryWeek. Сообщение в гостевом блоге Мэтта Миннера, старшего консультанта по техническим услугам в Catalyst Connection, входящей в национальную сеть MEP TM .
В наши дни в производственном секторе много говорят о роботах и о том, как они могут помочь производителям решить некоторые проблемы, с которыми они сталкиваются на сегодняшнем рынке, такие как повышение производительности и нехватка квалифицированных рабочих.
Но что именно имеют в виду аналитики и эксперты по автоматизации, когда используют слово «робот»? И как различные типы роботов могут улучшить реальную производственную операцию? Если вы — небольшой производитель, который интересуется роботами, но никогда с ними не работал, может быть сложно представить, как роботы могут вписаться в ваше предприятие. Вот обзор четырех типов промышленных роботов, которые должен знать каждый производитель.
Вот обзор четырех типов промышленных роботов, которые должен знать каждый производитель.
1.Шарнирно-сочлененные роботы
Шарнирно-сочлененный робот — это тип робота, который приходит на ум, когда большинство людей думают о роботах. Как и фрезерные станки с ЧПУ, шарнирные роботы классифицируются по количеству точек вращения или осей, которые у них есть. Самым распространенным является 6-осевой шарнирно-сочлененный робот. Также на рынке представлены 4- и 7-осевые агрегаты.
Гибкость, маневренность и досягаемость делают шарнирных роботов идеально подходящими для задач, охватывающих непараллельные плоскости, таких как обслуживание машин.Шарнирно-сочлененные роботы также могут легко проникнуть в отсек станка и под препятствиями, чтобы получить доступ к заготовке (или даже вокруг препятствия в случае 7-осевого робота).
Герметичные соединения и защитные рукава позволяют шарнирным роботам превосходно работать как в чистых, так и в грязных условиях. Возможность установки робота с шарнирно-сочлененной рамой на любую поверхность (например, потолок, направляющую) обеспечивает широкий спектр рабочих возможностей.
Возможность установки робота с шарнирно-сочлененной рамой на любую поверхность (например, потолок, направляющую) обеспечивает широкий спектр рабочих возможностей.
Сложность шарнирно-сочлененного робота требует более высокой стоимости по сравнению с другими типами роботов с аналогичной полезной нагрузкой.А шарнирно-сочлененные роботы менее подходят для высокоскоростных приложений, чем другие типы роботов, из-за их более сложной кинематики и относительно большей массы компонентов.
2. Роботы SCARA
Шарнирная рука робота с избирательным соответствием (SCARA) — хороший и экономичный вариант для выполнения операций между двумя параллельными плоскостями (например, переноса деталей с лотка на конвейер). Роботы SCARA отлично справляются с задачами вертикальной сборки, такими как вставка штифтов без заедания, благодаря своей вертикальной жесткости.
Роботы
SCARA легкие и имеют небольшие размеры, что делает их идеальными для использования в людных местах.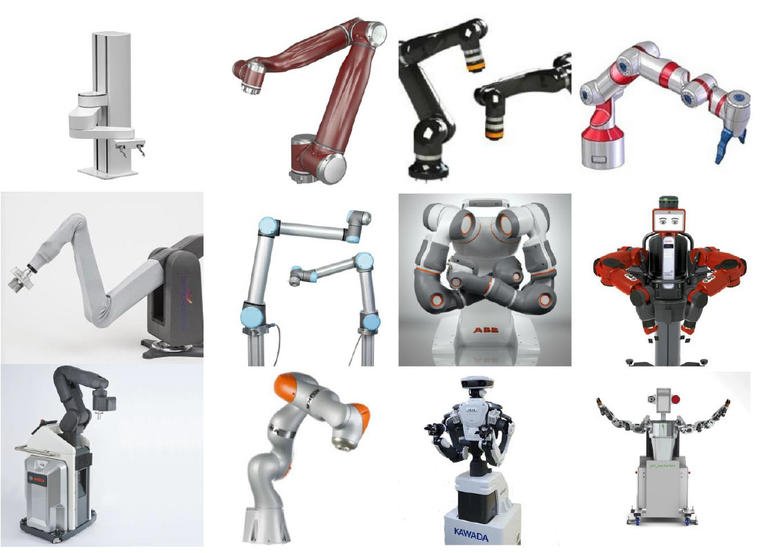 Они также могут иметь очень короткое время цикла.
Они также могут иметь очень короткое время цикла.
Из-за своей конструкции с фиксированным поворотным рычагом, что является преимуществом в определенных приложениях, роботы SCARA сталкиваются с ограничениями, когда дело доходит до задач, требующих обхода или доступа к внутренним объектам, таким как приспособления, приспособления или станки в пределах рабочей ячейки.
3.Дельта Роботы
Роботы
Delta, также называемые «роботами-пауками», используют три установленных на основании мотора для приведения в действие рычагов управления, которые позиционируют запястье. Базовые дельта-роботы представляют собой 3-осевые устройства, но также доступны 4- и 6-осевые модели.
При установке приводов на стационарном основании или очень близко к нему, а не на каждом шарнире (как в случае шарнирного робота), рука дельта-робота может быть очень легкой. Это обеспечивает быстрое перемещение, что делает дельта-роботов идеальными для очень высокоскоростных операций с небольшими грузами.
Важно отметить, сравнивая дельта-роботов с другими типами роботов: радиус действия дельта-роботов обычно определяется диаметром рабочего диапазона, а не радиусом от основания, как в случае шарнирно-сочлененных устройств и устройств SCARA. Например, дельта-робот с радиусом действия 40 дюймов будет иметь только половину вылета (20 дюймов в радиусе) шарнирно-сочлененного устройства или устройства SCARA диаметром 40 дюймов.
4. Декартовы роботы
Декартовы роботы обычно состоят из трех или более линейных приводов, собранных для конкретного применения.Расположенные над рабочим пространством декартовы роботы могут быть подняты, чтобы максимизировать площадь пола и приспособиться к широкому диапазону размеров заготовок. (При размещении на возвышении, подвешенном на двух параллельных рельсах, декартовых роботов называют «портальными роботами».)
Декартовы роботы обычно используют стандартные линейные приводы и монтажные кронштейны, сводя к минимуму стоимость и сложность любой «нестандартной» декартовой системы. Блоки большей производительности также могут быть интегрированы с другими роботами (такими как шарнирные роботы) в качестве «рабочих органов» для увеличения возможностей системы.Тем не менее, нестандартная природа декартовых роботов может сделать проектирование, спецификацию и программирование сложными или недоступными для более мелких производителей, намеревающихся использовать подход «сделай сам» к реализации робототехники.
Блоки большей производительности также могут быть интегрированы с другими роботами (такими как шарнирные роботы) в качестве «рабочих органов» для увеличения возможностей системы.Тем не менее, нестандартная природа декартовых роботов может сделать проектирование, спецификацию и программирование сложными или недоступными для более мелких производителей, намеревающихся использовать подход «сделай сам» к реализации робототехники.
Декартовы роботы не могут легко преодолевать препятствия. А открытые скользящие механизмы делают их менее подходящими для пыльных / грязных помещений.
Заключение
Независимо от того, занимаетесь ли вы внедрением самостоятельно или работаете с авторитетным системным интегратором, знание различных типов доступных роботов поможет вам выбрать лучшую машину.Немногое о возможностях и затратах, связанных с различными типами роботов, является важным первым шагом к принятию обоснованного решения.
Чтобы узнать больше о различиях между различными типами роботов, представленных на рынке, загрузите «Руководство производителя по робототехнике» от представителя компании MEP в национальной сети Catalyst Connection (часть MEP Пенсильвании), которая помогает малым и средним производителям ориентироваться в технологических преобразованиях.
Типы промышленных роботов и их различные применения
Откройте для себя множество типов промышленных роботов и их уникальные возможности.Получите четкое представление о каждом типе использования и применении роботов сегодня: роботизированные манипуляторы, мобильные роботы, воздушные дроны, подводные роботы и коботы.
Как вы решаете, какой тип промышленного робота вам подходит?
На рынке так много разных типов роботов — как узнать, какой из них использовать? Как и во многих вопросах проектирования и проектирования, «форма следует за функцией». То есть, какой тип робота нужен, зависит от его предполагаемой функции.Будет ли робот прикреплен к полу или другой поверхности, или он должен быть мобильным? Сколько единиц в час должен обрабатывать робот? Какой максимальный вес должен поднять робот? Если робот закреплен в одном месте, каков размер рабочего конверта? Рабочий конверт прямоугольный или круглый? Ответы на эти вопросы быстро сузят ваш выбор и позволят выбрать идеальный тип промышленного робота для ваших целей.
В этой статье мы исследуем различные типы роботов, их сильные и слабые стороны, а также то, как определить, для чего их использовать.
Содержание статьи
Стационарные роботы (роботизированные манипуляторы)
На рынке доступно семь основных типов стационарных роботов. Под стационарными мы подразумеваем роботов, которые прикреплены болтами к полу, потолку или какой-либо другой поверхности — они не мобильны. Как правило, стационарные роботы — это роботизированные манипуляторы, предназначенные для таких задач, как сбор и размещение, сортировка, сборка, сварка и отделка.
Здесь мы рассматриваем различные типы роботизированных манипуляторов, их характеристики и способы использования.
- Роботизированные манипуляторы с шарнирно-сочлененной рамой
- Декартовы или прямоугольные роботы
- Роботы SCARA
- Полярные или сферические роботы
- Дельта или параллельные роботы
- Цилиндрический
- Коллаборативные роботы / коботы
Робот-манипулятор с шарнирно-сочлененной рамой
Преимущества: Наиболее гибкое перемещение из всех типов манипуляторов роботов. Может быть довольно мощным, способен поднимать тяжелые предметы.
Может быть довольно мощным, способен поднимать тяжелые предметы.
Недостатки: Возможно, потребуется отгородить.Медленнее, чем у некоторых других манипуляторов. Дороже, чем другие роботы-манипуляторы. Нуждается в более сложных системах управления.
По сравнению с другими типами манипуляторов роботов, шарнирно-сочлененные манипуляторы наиболее напоминают движения руки человека. Типичная шарнирная рука имеет шесть осей или суставов. Их может быть меньше или больше, в зависимости от приложения и производителя. Чем больше суставов у робота, тем более плавным и менее «роботоподобным» становится его движение. Эта гибкость движения описывается степенями свободы.
Типичный шестиосевой робот, демонстрирующий различные виды вращения и суставы, определяющие количество «степеней свободы».
Интересный факт: Создатели искусственных рук считают, что рука человека имеет 27 степеней свободы. Рука человека имеет 7 степеней свободы, что в сумме дает 34 степени свободы для руки и кисти человека.
Воспроизвести все тонкие способы движения руки и кисти человека было бы слишком дорого и сложно для промышленного робота.Принято считать, что 6 степеней свободы манипулятора промышленного робота достаточно для выполнения практически любой задачи.
Робот не сможет играть на пианино, но в этом нет необходимости!
В зависимости от области применения роботизированная рука может быть оборудована захватом, роботизированным эквивалентом руки. Обычно захваты роботов намного проще человеческой руки. Иногда они могут быть такими простыми, как присоска или электромагнит. Или, возможно, трехпалый мягкий захват можно использовать для захвата деликатных предметов, например свежих продуктов или яиц.Существует множество различных типов захватов, и пока не найдено ни одного робота-захвата, который мог бы справиться со всеми задачами.
В качестве альтернативы, инструмент «End of Arm Tooling» (EoAT), как его еще называют, может представлять собой какой-то инструмент, возможно, вращающийся инструмент, который удерживает сверло, или какой-либо другой вид долота для удаления заусенцев, шлифования или фрезерования. Есть много возможностей, включая специализированные EoAT для сварки, окраски, шлифования, лазерной резки и многого другого.
Есть много возможностей, включая специализированные EoAT для сварки, окраски, шлифования, лазерной резки и многого другого.
Роботы с шарнирно-сочлененной рамой очень гибкие, так как все их суставы могут вращаться, в отличие от линейных или поступательных суставов, которые могут двигаться только по прямой линии.
Роботы
с шарнирно-сочлененной рамой используются в таких областях, как захват и установка, дуговая сварка, точечная сварка, упаковка, обслуживание машин и погрузочно-разгрузочные работы. Способность создавать дуги (или аналогичные узоры) в труднодоступных местах делает шарнирных роботов хорошим кандидатом для автомобильной промышленности и других производств, где эта способность требуется.
Исторически сложилось так, что большие и мощные роботы с шарнирно-сочлененной рамой, способные поднимать предметы весом в тонну или более, не были оснащены датчиками, которые позволяли бы им знать об окружающей их среде.Если бы человек встал на пути такого робота, он мог бы получить серьезные травмы или даже погибнуть.
В результате такие роботизированные манипуляторы должны быть выделены в отдельное пространство. Только квалифицированный персонал, который полностью понимает принцип работы робота, имеет право входить в отгороженное или огороженное пространство, в котором работают такие роботы.
Однако, если шарнирно-сочлененная рука робота оснащена соответствующими датчиками и управляющим программным обеспечением, она может безопасно работать рядом с людьми.Например, используя компьютерное зрение с камерой или, возможно, датчиком LiDAR, если такой робот чувствует, что что-то мешает его движению, или даже что человек или объект приближается, но еще не мешает, робот может замедлиться или остановиться. Другие датчики могут обнаружить столкновение — если рука на что-то наткнется, она остановится и / или изменит курс. Обычно шарнирно-сочлененные руки, которые можно безопасно использовать вместе с людьми, имеют ограниченную скорость и силу.
Декартовы или прямоугольные роботы
Преимущества: Простая система управления. В зависимости от модели может поднимать очень тяжелые предметы. Точный. Жесткий по всем трем осям. Дешевле, чем шарнирно-сочлененные.
В зависимости от модели может поднимать очень тяжелые предметы. Точный. Жесткий по всем трем осям. Дешевле, чем шарнирно-сочлененные.
Недостатки: Не может делать вращательные движения.
Эти роботы используют декартову систему координат (X, Y и Z) для линейных перемещений по трем осям (вперед и назад, вверх и вниз и из стороны в сторону). Все три сустава являются поступательными, что означает, что движение сустава ограничено движением по прямой.Поэтому таких роботов еще называют «линейными».
Декартов робот (иногда называемый роботом XYZ) работает в соответствии с координатами декартова пространства. Он может двигаться только линейно в трех направлениях.
декартовых роботов можно использовать для захвата и размещения, погрузочно-разгрузочных работ, автоматизации упаковки, хранения и извлечения, резки и сверления, а также для многих других приложений.
Они жесткие во всех трех измерениях, что делает их очень точными и воспроизводимыми. Они проще, чем шарнирные роботизированные манипуляторы, с более простым программным управлением и могут быть менее дорогими в зависимости от области применения.
Они проще, чем шарнирные роботизированные манипуляторы, с более простым программным управлением и могут быть менее дорогими в зависимости от области применения.
Портальные роботы — тип декартовых роботов
Преимущества: В зависимости от модели может поднимать очень тяжелые предметы. При желании может быть сделана очень большой, охватывая всю длину помещения. Может быть очень рентабельным для правильных приложений.
Недостатки: Не может вращаться.
Типичный портальный робот движется по путепроводе. Такие роботы могут поднимать тяжелые грузы и могут точно перемещать объекты на относительно большие расстояния, хотя их гибкость ограничена.
Декартовы или линейные роботы могут быть сконфигурированы как портальные роботы. Портальные роботы перемещаются по эстакаде. В зависимости от конструкции портальные роботы могут справляться с очень тяжелыми грузами и перемещать их быстро и точно. При необходимости их можно сделать очень большими, покрывающими всю площадь помещения.Меньшие портальные роботы могут быть полезны для подбора и других операций, требующих высокой точности и хорошей жесткости.
При необходимости их можно сделать очень большими, покрывающими всю площадь помещения.Меньшие портальные роботы могут быть полезны для подбора и других операций, требующих высокой точности и хорошей жесткости.
Поскольку аспект управления движением линейного робота относительно прост, он часто имеет более низкую стоимость, чем другие типы роботов, и может быть очень экономичным решением для многих задач автоматизации.
Рабочая зона декартового робота прямоугольная. Добавление вертикального движения означает, что рабочий конверт имеет форму коробки.
Роботы SCARA
Преимущества: Отлично подходит для многих сборочных применений.Быстро и точно. Экономичен при сборочных операциях.
Недостатки: Не такой гибкий, как шарнирно-сочлененные. Не так точно, как декартовы руки. Не так быстро, как роботы-манипуляторы Delta.
Робот SCARA может вращаться в двух шарнирах и имеет один линейный шарнир. Он «податливый» в горизонтальной плоскости и жесткий (не податливый) в вертикальной. Поэтому в его названии есть словосочетание «выборочное соответствие».
Он «податливый» в горизонтальной плоскости и жесткий (не податливый) в вертикальной. Поэтому в его названии есть словосочетание «выборочное соответствие».
Роботы
SCARA (рука робота селективной сборки соответствия) похожи на декартовых роботов в том, что они перемещаются по 3 суставам или осям.Однако, в отличие от декартовых роботов, два сустава роботов SCARA вращаются. Следовательно, они способны к более сложным движениям, чем декартовы роботы. Как правило, они быстрее и обладают большей гибкостью в движении, но менее точны, чем декартовы роботы.
Интересный факт: Широкое использование роботов SCARA произвело революцию в малой электронной промышленности. Благодаря малой занимаемой площади, простоте и конструктивным характеристикам они отлично подходят для этой области применения и доказали свою высокую рентабельность.
Как следует из «сборки» в названии, роботизированная рука SCARA была изобретена для сборочных приложений. Робот SCARA был создан в 1981 году Хироши Макино из Университета Яманаси в Японии. «Соответствие» в названии означает некоторую отдачу. То есть, если вы толкнете робота SCARA в горизонтальной плоскости, он немного поддается — он будет двигаться, он не совсем жесткий. Однако в вертикальной плоскости робот SCARA достаточно жесткий, и он не будет «давать», если вы толкнете его в этом направлении.Следовательно, он имеет «выборочное» соблюдение. Он податлив в горизонтальной плоскости, а не в вертикальной.
«Соответствие» в названии означает некоторую отдачу. То есть, если вы толкнете робота SCARA в горизонтальной плоскости, он немного поддается — он будет двигаться, он не совсем жесткий. Однако в вертикальной плоскости робот SCARA достаточно жесткий, и он не будет «давать», если вы толкнете его в этом направлении.Следовательно, он имеет «выборочное» соблюдение. Он податлив в горизонтальной плоскости, а не в вертикальной.
Выборочное соответствие весьма полезно при сборочных операциях, когда деталь необходимо вставить, например, в печатную плату. Такой вид сборки часто требует, чтобы деталь вставлялась в отверстие. Для центрирования детали в отверстии часто требуется небольшая «податливость», чтобы найти центральную точку — немного покачиваться или немного «уступить». Затем усилие введения, двигающееся вниз, должно быть твердым и жестким.
Роботы
SCARA менее жесткие, чем декартовы роботы, а также ограничены по весу, который они могут поднять, по сравнению с декартовым роботом, который может поднимать довольно тяжелые предметы. Роботы SCARA занимают мало места и обычно используются в приложениях, в которых расстояние перемещения относительно невелико. У них меньше степеней свободы, чем у шарнирных рычагов. С другой стороны, они обладают высокой точностью и достаточно воспроизводимы. И они дешевле, чем шарнирно-сочлененная рука.
Роботы SCARA занимают мало места и обычно используются в приложениях, в которых расстояние перемещения относительно невелико. У них меньше степеней свободы, чем у шарнирных рычагов. С другой стороны, они обладают высокой точностью и достаточно воспроизводимы. И они дешевле, чем шарнирно-сочлененная рука.
Рабочая зона робота SCARA имеет цилиндрическую форму, что также необходимо учитывать при рассмотрении заявки. Роботы SCARA, как правило, быстрее шарнирных манипуляторов, хотя и не так быстры, как роботы Delta.
Полярные или сферические роботы
Преимущества: Более простая система управления, чем шарнирный рычаг. Может иметь большой радиус действия. Очень хорошо подходит для многих сварочных работ. Может быть быстрее, чем шарнирно-сочлененная рука.
Недостатки: Не такой гибкий, как шарнирно-сочлененные манипуляторы.Старая технология. Часто требуется довольно большая занимаемая площадь. Не так быстро, как оружие Delta.
Не так быстро, как оружие Delta.
Полярный робот может вращаться вокруг своего основания и плеча и имеет линейное соединение для вытягивания руки. У полярных роботов сферическая рабочая зона.
Роботы
Polar (иногда называемые сферическими роботами) имеют комбинацию двух вращательных шарниров и одного линейного шарнира. Их конструкция создает рабочее пространство сферической формы.
Интересный факт: Первый промышленный робот (созданный в 1950-х годах), названный «Unimate», был сферическим роботом.
Роботы
Polar могут использоваться для литья под давлением, окраски, дуговой сварки и точечной сварки. Они могут иметь большой радиус действия, если оснащены линейным рычагом подходящего размера.
Роботы
Polar являются устаревшей технологией и могут быть заменены роботами с шарнирно-сочлененной рукой (которые также имеют сферическую рабочую зону), хотя в некоторых приложениях полярный робот может быть более рентабельным, чем его альтернативы.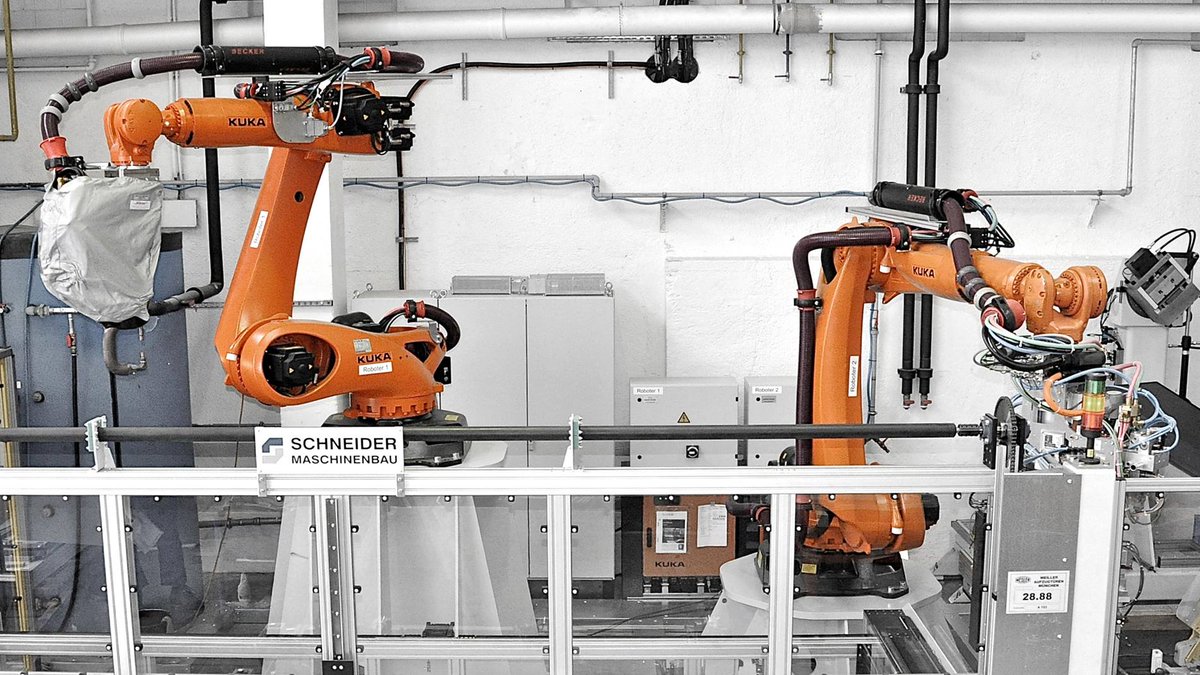
Дельта-роботы
Преимущества: Самая быстрая разработка манипуляторов для операций захвата и размещения.Легкий. Точный.
Недостатки: Ограничено относительно небольшими и легкими объектами. Не подходит для работы с объектами в вертикальной плоскости. Ограниченный охват.
Роботы Delta (также называемые параллельными роботами) имеют три роботизированных руки в форме параллелограммов. Обычно дельта-робот располагается над заготовками на подвесной эстакаде. Поскольку все двигатели находятся на основании, суставы и руки робота очень легкие по сравнению с другими роботами.Робот Delta имеет перевернутую куполообразную рабочую оболочку.
Интересный факт: Робот Delta изначально был разработан для того, чтобы производитель шоколада мог собирать кусочки шоколада и складывать их в коробку.
Пример типичного дельта- или параллельного робота. Руки легкие и могут быть очень быстрыми.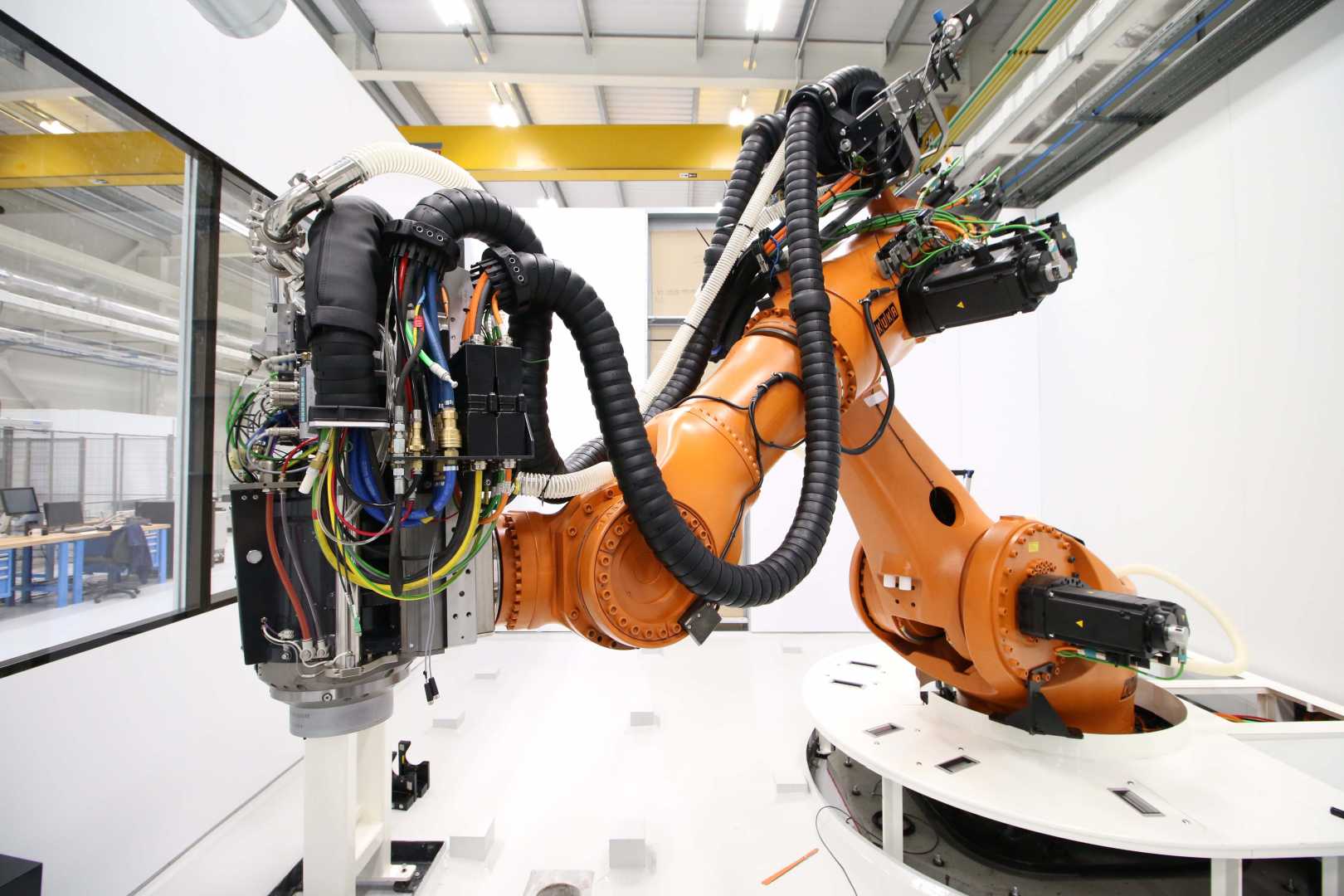
Конструкция робота Delta обеспечивает высокую скорость и точность работы. Роботы Delta в основном используются при подборе и размещении.Дополнительные области применения включают дозирование клея, пайку и сборку. Роботы Delta не могут нести тяжелые грузы, и это ограничивает типы инструментов End of Arm (EoAT) и задачи, с которыми они могут справиться.
В гибридных конструкциях роботов Delta иногда размещаются вращающиеся шарниры на концах рук, чтобы увеличить гибкость их движения.
Цилиндрические роботы
Преимущества: Жесткий. Точный. Идеально подходит для приложений, требующих круглой геометрии.
Недостатки: Старая технология. Ограниченная гибкость движений.
Цилиндрический робот имеет два линейных шарнира и один шарнир вращения.
Цилиндрические роботы имеют как минимум одно вращающееся соединение в основании и два линейных шарнира. Такой дизайн приводит к рабочему пространству цилиндрической формы.
Такой дизайн приводит к рабочему пространству цилиндрической формы.
Цилиндрические роботы обычно используются в тесных рабочих пространствах, и они идеально подходят для объектов, которые должны иметь круговую симметрию (например,г провода, трубы). При шлифовании, сборке и точечной сварке используются цилиндрические роботы.
Коллаборативные роботы (коботы)
Преимущества: Безопасная работа с людьми. Современные интерфейсы позволяют «научить» манипулятор робота, что делать без написания кода.
Недостатки: Не всегда самый быстрый вид манипулятора. Ограничены по силе и скорости.
Совместные роботы (коботы) обеспечивают взаимодействие человека и робота в безопасной рабочей среде без необходимости использования ограждений или других мер безопасности, применяемых в традиционных промышленных роботах.Однако меры безопасности приводят к снижению скорости работы.
Коллаборативные роботы, также известные как коботы, обычно представляют собой шарнирные руки. Они считаются безопасными для работы вместе с людьми. Операторы могут «научить» манипулятор робота, перемещая его.
Они считаются безопасными для работы вместе с людьми. Операторы могут «научить» манипулятор робота, перемещая его.
Помимо безопасности работы вместе с людьми, одна из особенностей, делающих коботов более способными к сотрудничеству, — это способность оператора обучать манипулятор робота совершать движения без написания программного кода.Оператор хватает манипулятор робота и физически перемещает его в нужном направлении. Затем рука робота может воспроизвести продемонстрированное движение.
Стандартный кобот обычно не предназначен для работы с очень тяжелыми предметами. Это создает ограничение на диапазон продуктов, которыми он может управлять.
Коллаборативные роботы имеют широкий спектр применений, таких как обслуживание станков, захват и установка, сборка, дуговая сварка, но, как правило, они не подходят для тяжелых условий эксплуатации или задач с очень высокой скоростью.
Автономные мобильные роботы
AMR или автономные мобильные роботы представляют собой быстрорастущий сегмент рынка промышленных роботов.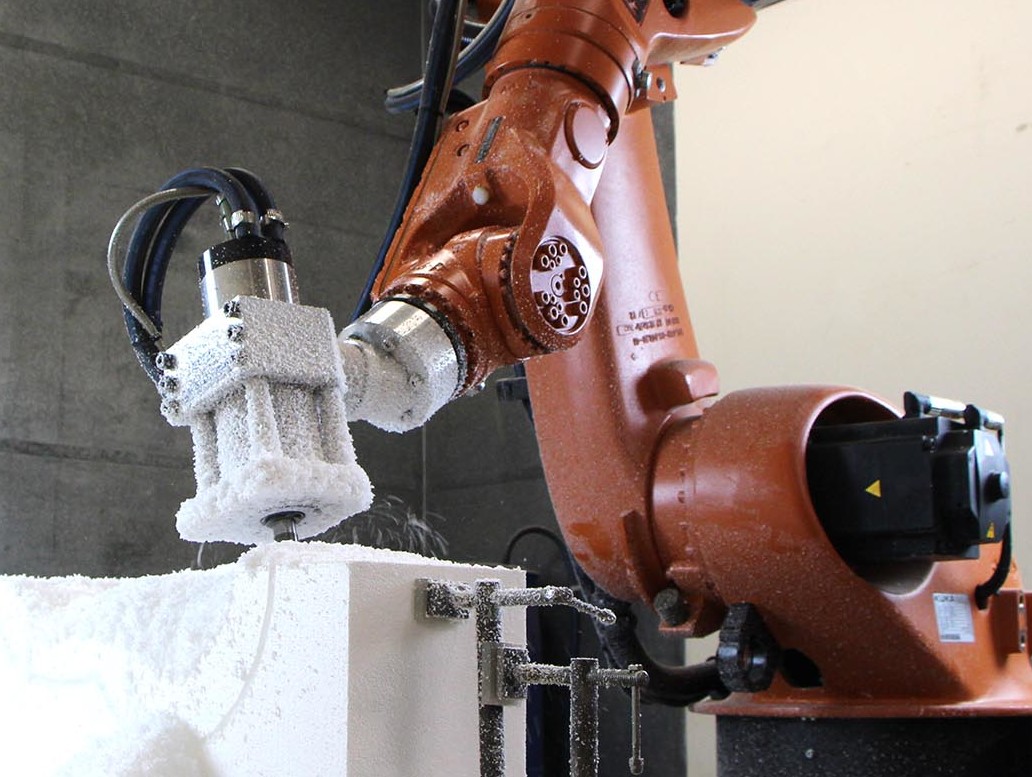 Они бывают разных форм и размеров, оптимизированные для задач, для которых они предназначены.
Они бывают разных форм и размеров, оптимизированные для задач, для которых они предназначены.
Тележка колесная
AMR
в виде тележек или транспортных средств с колесами обычно используются для перевозки товаров на заводе или складе. Они оснащены датчиками, бортовой вычислительной мощностью и электродвигателями, которые позволяют им перемещаться по объекту и создавать его внутреннюю карту.Часто это делается с человеком, который следит за AMR и направляет его с помощью пульта дистанционного управления.
После создания внутренней карты AMR может быть проинструктирован относительно пунктов назначения, в которые он должен отправиться. Ключевой особенностью AMR является то, что они могут независимо («автономно») перемещаться из одного места в другое, избегая препятствий на своем пути. Если им мешает человек, погрузчик или другой объект, они могут свернуть, чтобы избежать препятствия, или даже спланировать совершенно новый маршрут к месту назначения.
Автономные возможности AMR делают их очень гибкими по сравнению с конвейерной системой.
AMR
в виде колесных тележек можно использовать индивидуально для перевозки товаров, а также их можно использовать как часть роя или парка роботов. Например, Amazon использует парки AMR. Amazon использует так называемую конфигурацию «товары для человека», в которой каждый робот берет целую полку продуктов и приносит их человеку на станции сбора заказов. Затем человек берет товар (-ы) с полки и помещает его в контейнер для выполнения заказа в электронной коммерции.
Недавно достижения в области компьютерного зрения, искусственного интеллекта и технологий захвата сделали возможным заменить человека на станции сбора на шарнирную роботизированную руку. В этом случае колесная тележка AMR доставляет товары в руку робота для взаимодействия робота с роботом.
Автономные транспортные средства (AGV)
AGV обычно имеют форму транспортного средства с колесами, и это более старая технология, чем AMR.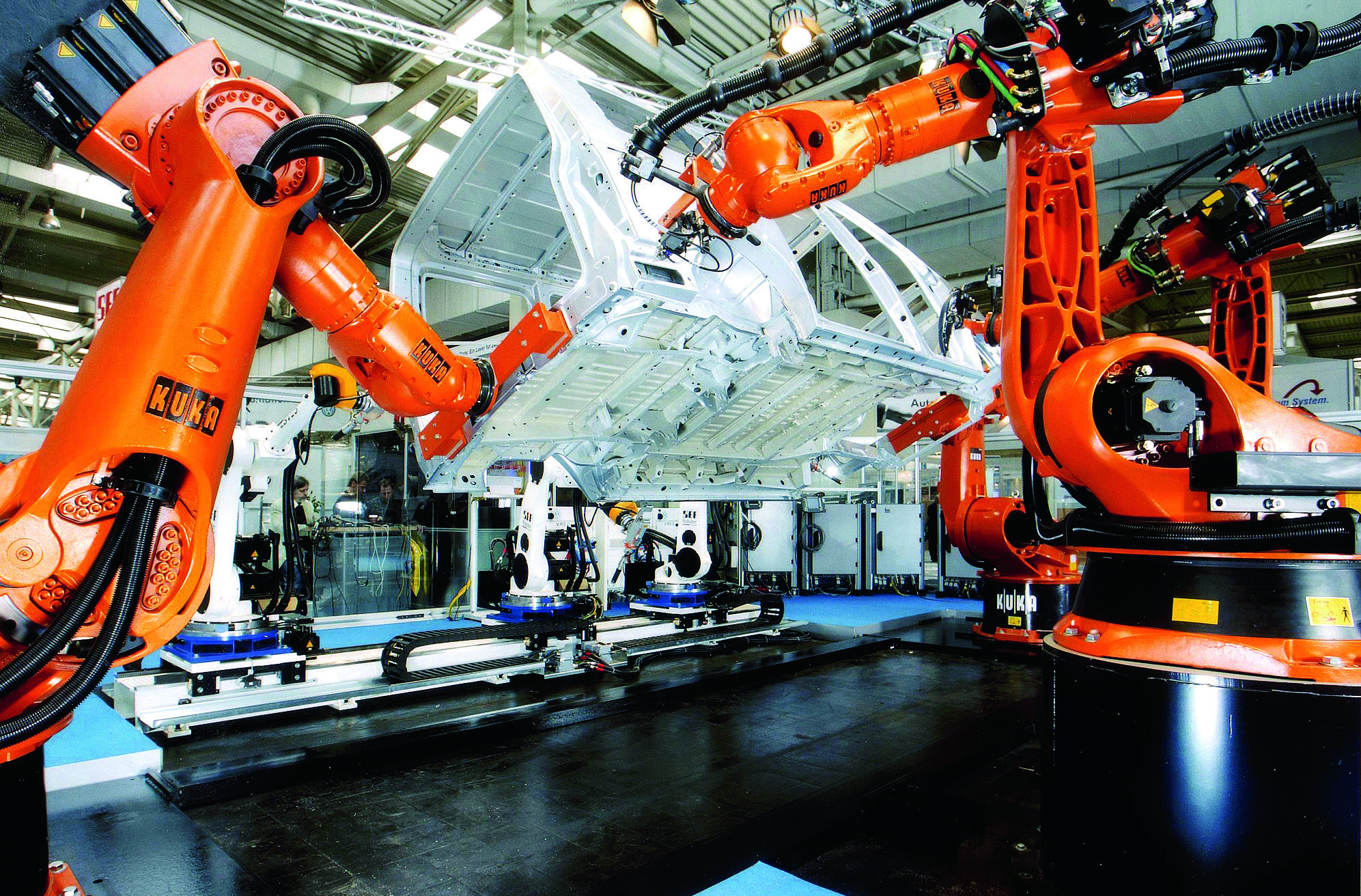 У них меньше бортового интеллекта и, следовательно, они не так автономны, как AMR.У AGV нет возможности составить карту объекта. Вместо этого они полагаются на проложенные для них пути. Пути определяются проводами, помещенными в пол, или специальной лентой, или другими видами направляющих. Если AGV встречает препятствия на своем пути, он может только остановиться и позвать на помощь.
У них меньше бортового интеллекта и, следовательно, они не так автономны, как AMR.У AGV нет возможности составить карту объекта. Вместо этого они полагаются на проложенные для них пути. Пути определяются проводами, помещенными в пол, или специальной лентой, или другими видами направляющих. Если AGV встречает препятствия на своем пути, он может только остановиться и позвать на помощь.
Однако различия между AGV и AMR становятся все более размытыми. AGV получают больше бортовых вычислительных мощностей, и некоторые из них теперь имеют возможность преодолевать препятствия на своем пути.
AMR с роботизированным манипулятором
Роботизированный манипулятор может быть установлен на тележке AMR на колесах. Это увеличивает гибкость робота и увеличивает разнообразие задач, которые он может выполнять. Одно из применений — использовать такого робота для обслуживания целого ряда станков. Робот может выгружать готовую деталь и загружать новую заготовку в один станок, а затем двигаться вниз по ряду и повторять операции для ряда станков.
Роботы на ножках
Миллионы людей видели на YouTube видео танцующих роботов, созданное Boston Dynamics, и поэтому видели двуногих и четвероногих роботов.Одно из промышленных применений роботов на ногах предполагает их развертывание для доставки посылок. Другой вариант использования — поисково-спасательные операции.
Использование ног вместо колес имеет определенные преимущества. Ноги позволяют роботу перемещаться по местности, которую тележки с колесами могут найти трудными или невозможными. Ноги позволяют подниматься по лестнице, а также легче садиться в автомобиль и выходить из него, чем тележка с колесами.
Сферические AMR
Автономные мобильные роботы в форме шара коммерчески доступны и имеют особые преимущества перед другими форм-факторами.Компоненты системы AMR сферической формы герметизированы внутри прочной оболочки. Это позволяет им работать в суровых условиях. Они также могут плавать и путешествовать по воде. Сферические AMR могут быть амфибиями, путешествовать как по воде, так и по суше.
Сферические AMR могут быть амфибиями, путешествовать как по воде, так и по суше.
Силовая установка сферического AMR чаще всего основана на смещении центра тяжести.
Промышленные применения сферических AMR — это, прежде всего, наблюдение и дистанционный контроль. Оснащенные камерами и средствами связи, они могут передавать видео обратно удаленному оператору.Для агрессивных сред, в которых может быть токсичный газ или другие опасные условия, сферический AMR может быть идеальным.
Летающие роботы (дроны)
Беспилотные летательные аппараты (БПЛА) или дроны все чаще используются в различных промышленных целях. Одно из приложений — использовать дроны на складах для инвентаризации. Дрон может летать по проходам склада и с помощью компьютерного зрения подсчитывать количество предметов в коробках на полках.
В зависимости от конструкции промышленный дрон может быть разновидностью автономного мобильного робота (AMR), поскольку некоторые модели могут автоматически обнаруживать препятствия и избегать их, а также самостоятельно перемещаться к месту назначения. Некоторым промышленным дронам можно дать «задание», которое может состоять в полете над горнодобывающей промышленностью или над инфраструктурным проектом. Дрон выполняет свою миссию автономно и может записывать видео проекта или производить определенные измерения и записывать их. Такие дроны можно использовать для наблюдения за ходом строительства.
Некоторым промышленным дронам можно дать «задание», которое может состоять в полете над горнодобывающей промышленностью или над инфраструктурным проектом. Дрон выполняет свою миссию автономно и может записывать видео проекта или производить определенные измерения и записывать их. Такие дроны можно использовать для наблюдения за ходом строительства.
Amazon и другие компании уже ограниченно используют дроны для доставки товаров длительного пользования и продуктов.
Подводные роботы
Существует большое количество разнообразных роботов, предназначенных для использования под водой.Некоторые подводные роботы спроектированы как автономные (автономные подводные аппараты — БПЛА), а некоторые созданы для дистанционного управления, по беспроводной связи или с помощью проводного троса. Некоторые подводные роботы используют гребные винты в качестве двигательной установки, аналогичные подводным лодкам. С другой стороны, многие такие роботы имитируют действия живых существ для их движения. Некоторые имитируют действия дельфинов, другие — змей, а третьи двигаются, как рыбы. Подобное подражание природе называется «биомимикрией», потому что действия робота имитируют биологические существа.
Некоторые имитируют действия дельфинов, другие — змей, а третьи двигаются, как рыбы. Подобное подражание природе называется «биомимикрией», потому что действия робота имитируют биологические существа.
Подводные роботы могут использоваться для обследования морских нефтяных платформ, трубопроводов и для научных исследований. Другие приложения включают использование подводных роботов для осмотра дна мостов, осмотра водозаборов гидроэлектростанций и осмотра коралловых рифов.
Подводные роботы используются полицейскими управлениями для записи на видео дна водоемов в поисках улик. Военные также интересуются подводными роботами. Может ли гидролокатор отличить робота-дельфина от настоящего?
У подводных роботов много преимуществ.Такие роботы означают, что не нужно нести риск и расходы, связанные с дайверами-людьми. Роботы могут оставаться под водой дольше людей. Оснащение подводных роботов датчиками позволяет им измерять и регистрировать почти бесконечное количество и типы свойств
Как найти идеальный тип робота для вашей организации
HowToRobot — это глобальная платформа, помогающая компаниям добиться успеха в автоматизации. Используя всемирный каталог HowToRobot, содержащий более 15 000 робототехнических компаний, вы можете найти нужный вам тип робота, идеально подходящий для вашего приложения.
Используя всемирный каталог HowToRobot, содержащий более 15 000 робототехнических компаний, вы можете найти нужный вам тип робота, идеально подходящий для вашего приложения.
Если вы уже знаете, какой тип робота вам нужен, и хотите получить дополнительную информацию от поставщиков робототехники, вы можете получать расценки и информацию о продуктах и ценах от нескольких поставщиков через HowToRobot.
Если вы не уверены, какой тип роботизированного компонента или детали вам нужен, и хотели бы просто описать ваше приложение, некоторые из ваших ключевых показателей эффективности (KPI) и цели, которых вы хотите достичь с помощью автоматизации, вы можете отправить запрос на Информация и получение ответов от поставщиков, которые могут предоставить вам информацию о своих решениях.
Обратите внимание, что есть беспристрастные эксперты HowToRobot, которые могут помочь вам сориентироваться в этом процессе. Щелкните здесь, чтобы назначить консультацию с экспертом-консультантом.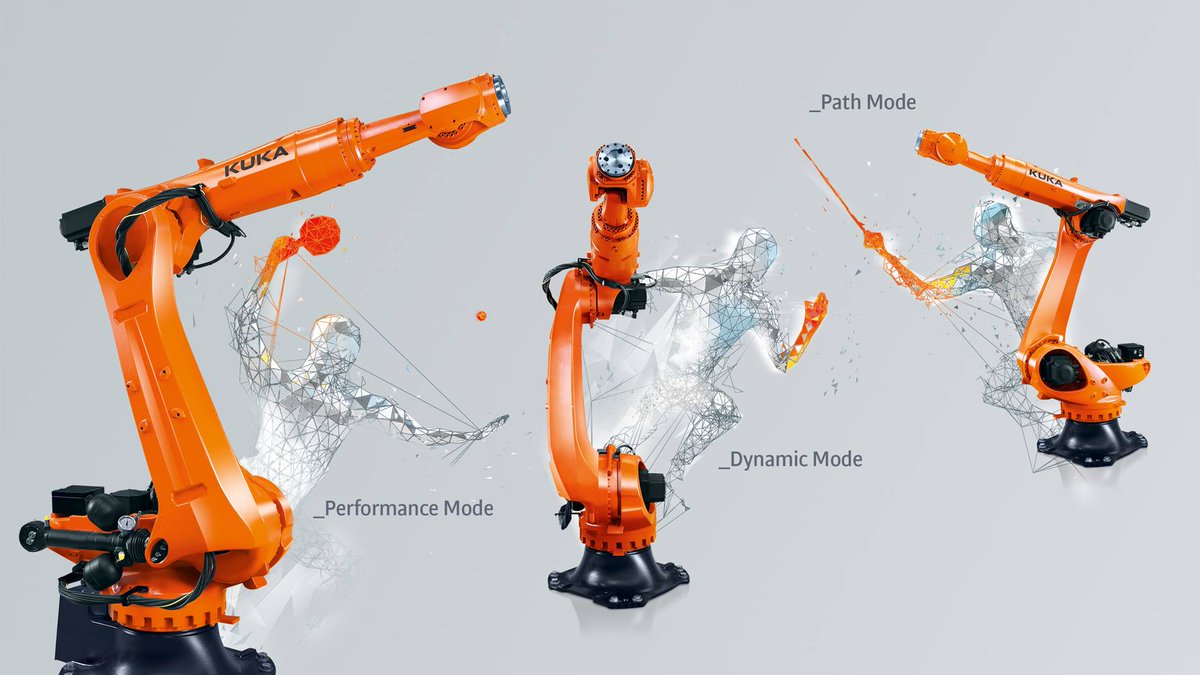
Четыре типа промышленных роботов для перспективного производства
Изображение предоставлено: Robot Worker.jpg: Гора в Шанхайском музее науки и технологий через Wikimedia CCA 3.0
Когда вы слышите слово «промышленный робот», вы можете подумать о роботизированных манипуляторах, сваривающих машины, когда они едут по сборочной линии, или о роботизированной ячейке, быстро собирающей компьютерные микросхемы.Конечно, существует широкий выбор конфигураций роботов для удовлетворения различных производственных потребностей. Хотя было бы невозможно обсудить все из них в этой статье, вот несколько роботов, с которыми вы можете столкнуться на производстве или, возможно, реализовать, чтобы решить проблему самостоятельно.
6-осевой рычаг
При рассмотрении роботов-манипуляторов, вероятно, первое, что приходит в голову, — это 6-осевые манипуляторы. Обладая превосходной точностью и гибкостью, эти роботы применяются в самых разных ситуациях. Они названы по количеству управляемых осей или доступных степеней свободы. Как определено в видео ниже, эти роботы действуют аналогично человеческой руке: оси 1 и 2 сравнимы с плечом, оси 3 и 4 имитируют локоть и предплечье, а оси 5 и 6 действуют как запястье / кисть. сборка.
Они названы по количеству управляемых осей или доступных степеней свободы. Как определено в видео ниже, эти роботы действуют аналогично человеческой руке: оси 1 и 2 сравнимы с плечом, оси 3 и 4 имитируют локоть и предплечье, а оси 5 и 6 действуют как запястье / кисть. сборка.
Если вы рассмотрите свою собственную руку, «оси 5 и 6» не допускают такого же рода вращения, как эти механические звери — возьмите и удерживайте ваше запястье и попытайтесь повернуть его в осевом направлении. Однако мы можем двигать запястьями вверх, вниз, влево и вправо, так что мы не полностью превзойдены.Промышленные роботы этого типа бывают размером примерно с человеческую руку на маленьком конце до роботов, достаточно больших, чтобы поднять автомобиль. Использование этого типа роботов включает в себя все, от укладки на поддоны — упорядоченного размещения деталей — до общих манипуляций с деталями, механической обработки и, конечно же, сварки.
SCARA
Как я полагаю, менее 50% людей, которые работают с ними, знают, что это означает либо манипулятор робота с селективной сборкой, либо шарнирный манипулятор с селективным соответствием.Лично я бы выбрал второе определение, поскольку их можно использовать не только для операций сборки. Однако они более ограничены в применении, чем 6-осевые рычаги, перемещающиеся в основном в горизонтальной плоскости.
Основная идея этих роботов заключается в том, что они сочетают в себе приводимые в действие горизонтальные «плечевые» и «локтевые» суставы, чтобы позволить роботу складываться и достигать различных положений в плоскости x / y. Третья ось перемещает концевой эффектор вверх и вниз в направлении Z, в то время как другая вращает запястье, чтобы позволить ему правильно расположить предметы в осевом направлении.Как видно на видео ниже, эти роботы могут быть очень быстрыми:
Портальный, декартово или линейный робот
Декартовы роботы, как следует из названия, движутся в направлениях x, y и z и являются наиболее простыми роботами в этом списке с точки зрения управления. Реализацией этого типа роботов является фрезерный станок с ЧПУ, где двигатели управляют линейным перемещением режущего инструмента в каждом направлении. Этот тип «бота» также может использоваться для операций по перегрузке, таких как SCARA или шестиосевая модель.В зависимости от конфигурации портала он может быть очень большим.
Примечательно, что другие типы автоматизации могут быть объединены с портальной системой, что обеспечивает большую универсальность. Рассмотрим, например, обрабатывающий центр на видео ниже, который сочетает в себе портальную систему с продвинутыми движениями запястья и основания:
Дельта Робот
Роботы
Delta состоят из трех наборов параллелограммов с приводом от двигателя, что позволяет концевому эффектору оставаться на одном уровне при движении с высокой скоростью в декартовой плоскости (x, y, z).Хотя они, как правило, ограничиваются манипуляциями с легкими частями, их скорость может дать огромное преимущество перед другими ботами из этого списка. Они движутся достаточно быстро, чтобы людям было сложно их визуально отследить. При реализации с собственной системой технического зрения это позволяет выполнять универсальные операции по подъему и перемещению, как показано в ролике ниже:
Чтобы увидеть еще один пример того, что могут делать эти роботы, посмотрите этот второй клип от MimixMotion: С фоновым шумом для проверки фактической скорости . Здесь не только невероятная скорость, но и нужно увидеть процедуру отслеживания и складывания, чтобы в нее поверить. Обратите внимание, что клип был опубликован 11 лет назад, так что, по-видимому, дела пошли даже дальше того, что там показано:
Здесь не только невероятная скорость, но и нужно увидеть процедуру отслеживания и складывания, чтобы в нее поверить. Обратите внимание, что клип был опубликован 11 лет назад, так что, по-видимому, дела пошли даже дальше того, что там показано:
Конечно, это лишь некоторые из доступных вариантов роботов. В то время как разные производители на законных основаниях заявляют об определенных преимуществах своих устройств, большая часть специализации проявляется в форме рабочих органов (рук), адаптированных для конкретных работ.Эффективное программирование и тщательное расположение деталей также могут помочь повысить производительность производственных ячеек. В то время как роботы развиваются в своих способностях, системные интеграторы должны быть на вершине своей игры и постоянно учиться, чтобы предоставлять своим клиентам оптимальную ценность.
Об авторе
Джереми С. Кук — внештатный технический журналист и технический консультант с более чем 10-летним опытом автоматизации производства.Заядлый создатель и экспериментатор, можете подписаться на него в Twitter [https://twitter.com/JeremySCook] или увидеть его электромеханические подвиги на канале Jeremy S. Cook на YouTube ! [https://www.youtube.com/c/jeremyscook
Шесть основных типов промышленных роботов в 2020 году
Повсеместное распространение роботов на заводах и в промышленности привело к тому, что роботы стали инструментом автоматизации. Быстрый технический прогресс позволил многим производственным секторам полагаться на роботов для выполнения повседневных задач.По оценкам PricewaterhouseCoopers, до 45% рабочих операций можно успешно автоматизировать. Влияние роботов на деятельность компании хорошо известно. К настоящему времени многие руководители слышали о роботах SCARA или Polar и знают, что эти передовые машины могут повысить их производительность и производительность. Какие еще существуют роботы и как они могут принести пользу вашему бизнесу? В этой статье мы рассмотрим шесть основных типов промышленных роботов, представленных в настоящее время на рынке.
Влияние роботов на деятельность компании хорошо известно. К настоящему времени многие руководители слышали о роботах SCARA или Polar и знают, что эти передовые машины могут повысить их производительность и производительность. Какие еще существуют роботы и как они могут принести пользу вашему бизнесу? В этой статье мы рассмотрим шесть основных типов промышленных роботов, представленных в настоящее время на рынке.
Каковы основные типы промышленных роботов в 2020 году?
Все роботы выполняют одни и те же стандартные функции: они используют датчики для обнаружения изменений в окружающей среде и манипуляторы для взаимодействия с окружающей средой. Роботы обычно выполняют две основные задачи: сбор урожая и позиционирование. Однако то, как они это делают, так же разнообразно, как и задачи, которые им поручены.
Шарнирно-сочлененные роботы
Шарнирно-сочлененные роботы — это наиболее распространенные типы промышленных роботов.Они имеют механическую конфигурацию, напоминающую человеческую руку.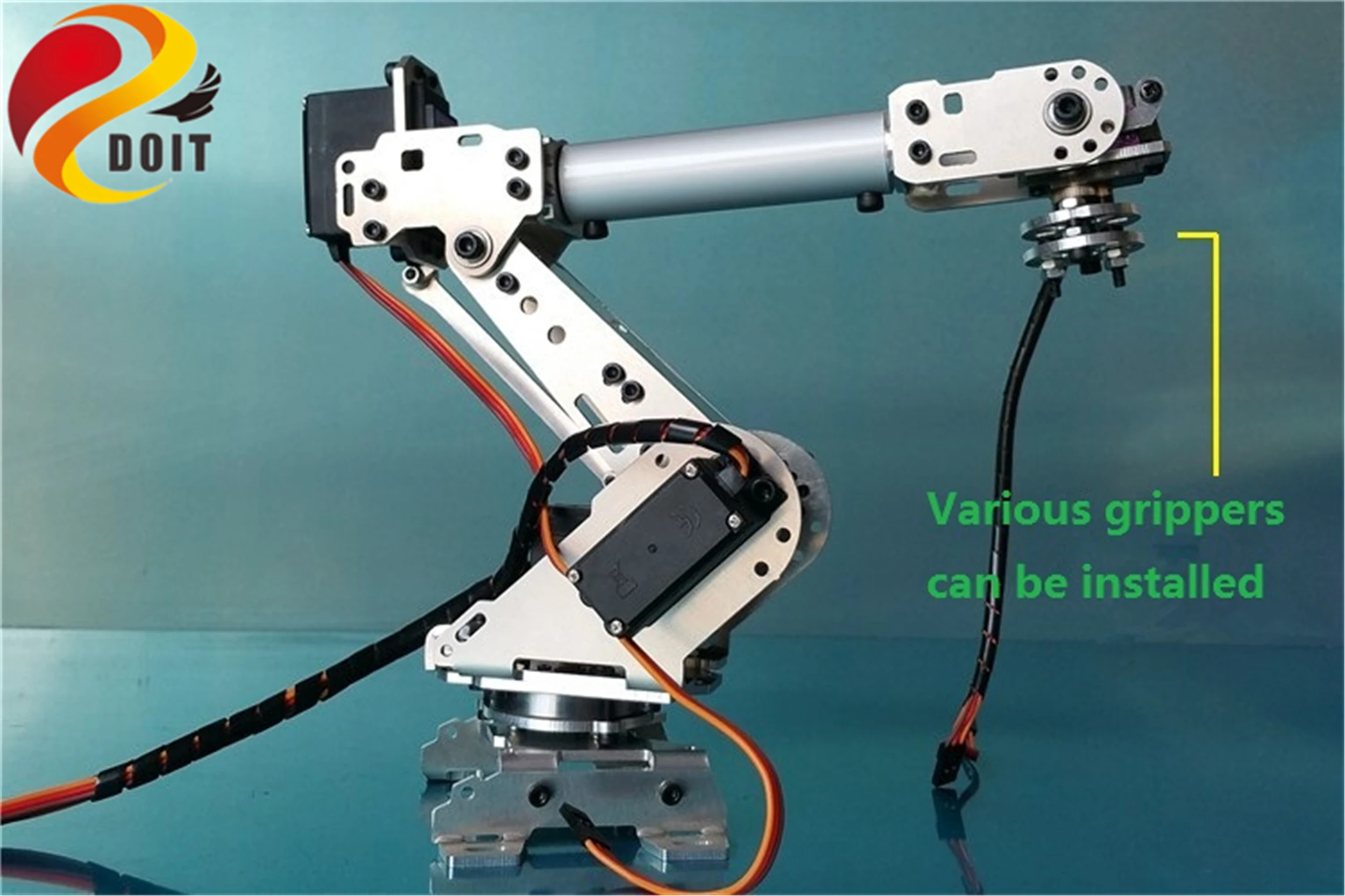 Благодаря использованию шарнирных соединений с несколькими степенями свободы рука обеспечивает широкий диапазон движений. Шарнирно-сочлененные роботы с шестью степенями свободы являются наиболее распространенными. Другие типы могут иметь только четыре степени свободы или даже меньше.
Благодаря использованию шарнирных соединений с несколькими степенями свободы рука обеспечивает широкий диапазон движений. Шарнирно-сочлененные роботы с шестью степенями свободы являются наиболее распространенными. Другие типы могут иметь только четыре степени свободы или даже меньше.
Преимущества : Высокая скорость, большой рабочий диапазон для минимальной площади пола. Легко совмещается с несколькими плоскостями.
Недостатки : Требуется специальный контроллер робота, сложное программирование, сложная кинематика.
Подробнее о шарнирных роботах >>
Цилиндрические роботы
Цилиндрические роботы имеют по крайней мере одно вращающееся соединение в основании и по крайней мере одно призматическое соединение, соединяющее звенья. Благодаря поворотному валу и выдвижному рычагу они могут перемещаться вертикально и горизонтально, скользя. Они предлагают как линейное движение, так и вращательное движение вокруг вертикальной оси. Компактная конструкция эффектора позволяет роботу достигать ограниченных рабочих пространств без потери скорости. Цилиндрические роботы в основном используются в простых приложениях, таких как подбор и размещение, где необходимо учитывать вращательные движения.
Цилиндрические роботы в основном используются в простых приложениях, таких как подбор и размещение, где необходимо учитывать вращательные движения.
Преимущества : Простота эксплуатации и монтажа. Минимальная сборка. Роботы могут дотянуться до базы на 360 градусов. Требует минимальной площади на полу и может выдерживать большие нагрузки.
Недостатки : Плохо справляется с препятствиями. Низкая точность по направлению вращательного движения.
Декартовы роботы
Декартовы роботы также называются прямолинейными или портальными роботами и имеют прямоугольную конфигурацию.Эти типы промышленных роботов обеспечивают линейное движение за счет скольжения по трем перпендикулярным осям (X, Y и Z). Благодаря своей жесткой конструкции и конфигурации они могут нести большие нагрузки. Их также можно использовать для выполнения задач по подбору и размещению, погрузки и разгрузки, погрузочно-разгрузочных работ и даже операций с высокой точностью. Большинство 3D-принтеров работают на портальных системах.
Преимущества : Обеспечивает высокую точность при простом управлении. Легко программировать в автономном режиме и легко настраиваемый.Способен выдерживать большие нагрузки. Относительно недорогой.
Недостатки : Требуется большая производственная и установочная площадь. Сложная сборка. Движение ограничено только одним направлением за раз.
Роботы SCARA
SCARA означает робот-манипулятор для сборки избирательного соответствия. Эти роботы состоят из двух параллельных шарниров, которые обеспечивают движение в одной изолированной плоскости. Поворотные валы расположены вертикально, а концевой эффектор перемещается горизонтально. Роботы SCARA отлично справляются с задачами, требующими точных боковых перемещений, и идеально подходят для сборки.Роботы SCARA подходят для операций по подъему или сборке, где требуются высокая скорость и точность. Роботы SCARA быстро перемещаются и легче интегрируются в существующую инфраструктуру, чем цилиндрические и декартовы роботы.
Преимущества : Высокая скорость, отличная повторяемость, большое рабочее пространство.
Недостатки : Требуется специальный контроллер робота, ограничен плоскими поверхностями, трудно программировать в автономном режиме.
Подробнее о Scara Robots >>
Полярные роботы
Роботы Polar — ветераны мира роботов.Они являются одними из первых типов роботов, которые были разработаны и по-прежнему популярны. Оси робота объединены, чтобы сформировать полярную систему координат, которая позволяет роботу иметь сферическую рабочую область. Роботы Polar обычно используются для литья под давлением, литья под давлением, сварки и обработки материалов.
Преимущества : Диапазон движения 360 градусов. Большой объем работы. Требуют минимальной площади пола.
Недостатки : Малый вертикальный вылет, низкая точность и низкая повторяемость в направлении вращательного движения.Они требуют сложной системы управления.
Дельта Роботы
Роботов
Delta также называют роботами с параллельным соединением. Они состоят из параллельных шарнирных рычагов, соединенных с общим основанием. Роботы Delta особенно полезны для задач прямого управления и операций с большим маневрированием (таких как быстрые работы по подбору и перемещению). Роботы Delta умело используют механическое преимущество четырехрычажных систем навески.
Они состоят из параллельных шарнирных рычагов, соединенных с общим основанием. Роботы Delta особенно полезны для задач прямого управления и операций с большим маневрированием (таких как быстрые работы по подбору и перемещению). Роботы Delta умело используют механическое преимущество четырехрычажных систем навески.
Преимущества : Достигаются очень высокие скорости. Высокая точность работы.
Недостатки : Сложная работа, требуется специальный контроллер робота.
Как видите, на рынке существует множество вариантов промышленных роботов. Помимо перечисленных автономных моделей, вы можете обнаружить, что коллаборативные роботы лучше подходят для ваших нужд автоматизации. Коллаборативные роботы бывают тех же основных типов, что и в этой статье, но предназначены для работы непосредственно с людьми-операторами.
Прежде чем выбирать робота, важно знать, какие задачи он вам нужен, и как вы хотите, чтобы он интегрировался в существующую инфраструктуру. Если вам нужна помощь в выборе лучшего робота, ознакомьтесь с некоторыми другими нашими статьями на DIY-Robotics.com. Наши роботы-интеграторы помогут выбрать подходящие инструменты автоматизации для вашей компании.
Если вам нужна помощь в выборе лучшего робота, ознакомьтесь с некоторыми другими нашими статьями на DIY-Robotics.com. Наши роботы-интеграторы помогут выбрать подходящие инструменты автоматизации для вашей компании.
Промышленные роботы: какие бывают типы?
Промышленный робот обычно относится к руке робота, используемой в производственной среде для производственных приложений. Традиционные промышленные роботы можно классифицировать по различным критериям, таким как тип движения , (степени свободы), , , , приложение, (производственный процесс), , , , архитектура, (последовательный или параллельный) и марка , .Кроме того, существует новый классификатор для промышленных роботов, которые могут быть совместно или не . В этой статье представлены различные классификации с некоторыми примерами.
Промышленные роботы с разными типами движений
Декартовы роботы
Декартовы роботы — это роботы, которые могут выполнять 3 перевода с помощью линейных слайдов.
Роботы Scara
Роботы Scara — это роботы, которые могут делать 3 перемещения плюс вращение вокруг вертикальной оси.
6-осевые роботы
6-осевые роботы — это роботы, которые могут полностью позиционировать свой инструмент в заданном положении (3 перемещения) и ориентации (3 ориентации)
Резервные роботы
Резервные роботы также могут полностью позиционировать свой инструмент в заданном положении. Но в то время как 6-осевые роботы могут иметь только одно положение для одного заданного положения инструмента, резервные роботы могут приспособить данное положение инструмента к разным положениям.Это похоже на человеческую руку, которая может удерживать фиксированную ручку, двигая плечевым и локтевым суставами.
Двуручные роботы
Двуручные роботы состоят из двух рук, которые могут работать вместе с заданной заготовкой.
Тип движения определяется расположением шарниров (размещением и типом) и связями.
Промышленные роботы различного назначения
Приложение — это тип работы, для выполнения которой предназначен робот.Модели роботов создаются с учетом конкретных приложений или процессов. У разных приложений будут разные требования. Например, для покрасочного робота потребуется небольшая полезная нагрузка, но большой диапазон движения и он будет взрывозащищенным. С другой стороны, сборочный робот будет иметь небольшое рабочее пространство, но будет очень точным и быстрым. В зависимости от целевого приложения промышленный робот будет иметь определенный тип движения, размер связи, закон управления, программное обеспечение и дополнительные пакеты.Ниже приведены некоторые типы приложений:
Сварочные роботы
Роботы-манипуляторы
Сборочный робот
Последовательные или параллельные промышленные роботы
Серийные роботы являются наиболее распространенными. Они состоят из серии шарниров и рычагов, идущих от основания к механизму робота.
Они состоят из серии шарниров и рычагов, идущих от основания к механизму робота.
Параллельные роботы бывают разных форм. Некоторые называют их роботами-пауками. Параллельные промышленные роботы сделаны таким образом, что вы можете замкнуть петли от основания к инструменту и обратно к базе снова.Это похоже на то, что многие руки работают вместе с роботом. Параллельные промышленные роботы, как правило, имеют меньшее рабочее пространство (попробуйте двигать руками, удерживая руки вместе, а не пространство, которое вы можете достичь свободной рукой), но более высокие ускорения, поскольку приводы не нужно перемещать: все они сидят на база.
Марки промышленных роботов
Есть много торговых марок промышленных роботов. Самые крупные из них будут иметь полный набор роботов для разных приложений и разных размеров.Самые маленькие компании обычно ориентируются на определенный размер или область применения. Примеры торговых марок промышленных роботов:
Суммируя все вышеперечисленное, можно, например, иметь:
- Движение Scara, упаковка, параллельное, робот ABB
- 6-осевой, сварочный, серийный, робот Motoman
Последнее поколение: Промышленные роботы для совместной работы
Есть новый классификатор, который совсем недавно был использован для классификации промышленного робота, то есть, может ли он сотрудничать со своими коллегами-людьми. Коллаборативные роботы созданы таким образом, что соблюдают некоторые стандарты безопасности и не могут причинить вред человеку. В то время как традиционные промышленные роботы обычно должны быть ограждены от коллег-людей по соображениям безопасности. Совместных роботов можно использовать в той же среде, что и людей. Их также обычно можно обучить, а не программировать оператор. Примеры коллаборативных роботов:
Коллаборативные роботы созданы таким образом, что соблюдают некоторые стандарты безопасности и не могут причинить вред человеку. В то время как традиционные промышленные роботы обычно должны быть ограждены от коллег-людей по соображениям безопасности. Совместных роботов можно использовать в той же среде, что и людей. Их также обычно можно обучить, а не программировать оператор. Примеры коллаборативных роботов:
Десять популярных промышленных роботов
«Принудительный труд.«Это буквальное определение чешского слова, означающего« робот », которое впервые появилось в 1920-х годах. Но только в 1960-х годах промышленные роботы были представлены в автомобильной промышленности сборочного завода.
С научной точки зрения, ISO 8373: 2012 определяет промышленного робота как «автоматически управляемый, перепрограммируемый, многоцелевой манипулятор, программируемый по трем или более осям, который может быть стационарным или мобильным для использования в приложениях промышленной автоматизации. «Однако в обрабатывающей промышленности мы рассматриваем промышленных роботов как рабочих, которые могут выполнять опасные или повторяющиеся задачи, необходимые для производственной операции с высокой степенью точности.
«Однако в обрабатывающей промышленности мы рассматриваем промышленных роботов как рабочих, которые могут выполнять опасные или повторяющиеся задачи, необходимые для производственной операции с высокой степенью точности.
Первый промышленный робот Unimate присоединился к сборочной линии на заводе General Motors в Юинг-Тауншип, штат Нью-Джерси, в 1961 году. Это была автоматизированная форма для литья под давлением, которая выпускала горячие дверные ручки и другие автомобильные детали в чаны охлаждения. жидкость на производственной линии, которая перемещала их к рабочим для окончательной отделки и полировки.
Программируемость промышленных роботов в значительной степени была инструментом, позволяющим использовать их для множества различных задач, но на самом деле это не давало им интеллекта. Они выполняли монотонные и небезопасные задачи и использовались из-за их точности и повторяемости. В результате, по данным Международной федерации робототехники, автомобильная промышленность с 2010 года является самым важным потребителем промышленных роботов.
Промышленные роботы произвели революцию в промышленных рабочих местах во всех отраслях с момента их появления в производственной среде.На самом деле рост рынка промышленных роботов невероятен. По прогнозам, к 2027 году он будет стоить более 66 миллиардов долларов, при этом среднегодовой темп роста в прогнозируемый период составит 15,1%.
Вот конкретные задачи, для которых предназначены традиционные промышленные роботы:
10 исторически распространенных промышленных роботов
1. Дуговая сварка
Дуговая сварка, или роботизированная сварка, стала обычным явлением в 1980-х годах. Одной из движущих сил перехода на роботизированную сварку является повышение безопасности рабочих от дугового ожога и вдыхания опасных паров.
2. Точечная сварка
Точечная сварка соединяет две соприкасающиеся металлические поверхности, пропуская через точку большой ток, который плавит металл и формирует сварной шов, доставляемый в точку за очень короткое время (примерно десять миллисекунд).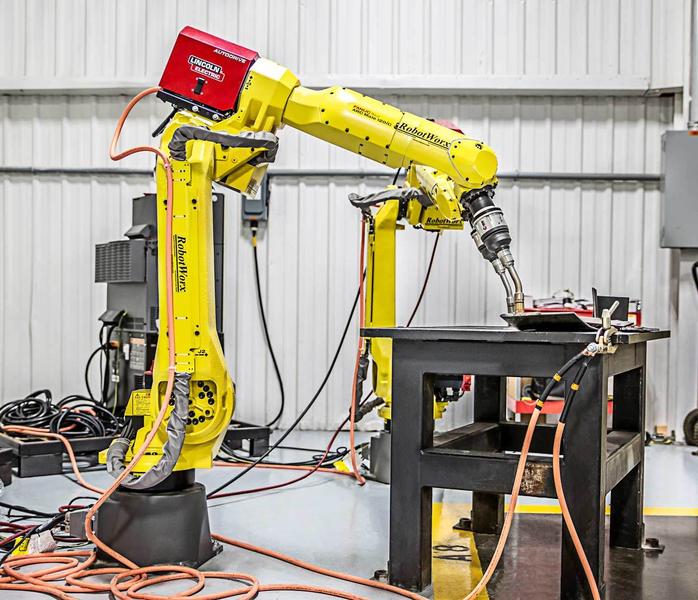
3. Работа с материалами
Роботы-манипуляторы используются для перемещения, упаковки и отбора продуктов. Они также могут автоматизировать функции, связанные с перемещением деталей с одного оборудования на другое. Снижены прямые затраты на рабочую силу и устранена большая часть утомительных и опасных видов деятельности, традиционно выполняемых человеческим трудом.
4. Уход за машинами
Роботизированная автоматизация для ухода за машинами — это процесс загрузки и выгрузки сырья в машины для обработки и наблюдения за машиной, пока она выполняет свою работу.
5. Живопись
Роботизированная покраска используется в автомобилестроении и многих других отраслях, поскольку повышает качество и стабильность продукта. Снижение затрат также достигается за счет меньшего количества переделок.
6. Сбор, упаковка и паллетирование
Большинство продуктов обрабатываются несколько раз перед окончательной отгрузкой.Роботизированный сбор и упаковка увеличивает скорость и точность, а также снижает производственные затраты.
7. Сборка
Роботы обычно собирают продукты, избавляя от утомительных и утомительных задач. Роботы увеличивают производительность и снижают эксплуатационные расходы.
8. Механическая резка, шлифовка, удаление заусенцев и полировка
Повышение маневренности роботов дает возможность производства, которую иначе очень сложно автоматизировать. Примером этого является изготовление ортопедических имплантатов, например, коленных и тазобедренных суставов.Полировка и полировка тазобедренного сустава вручную обычно занимает 45-90 минут, в то время как робот может выполнить ту же функцию всего за несколько минут.
9. Материалы для склеивания, герметизации и напыления
Роботы
Sealer построены с многочисленными конфигурациями роботизированных манипуляторов, которые позволяют роботу наносить клей на любой тип продукта. Основное преимущество этого приложения — повышение качества, скорости и стабильности конечного продукта.
10.
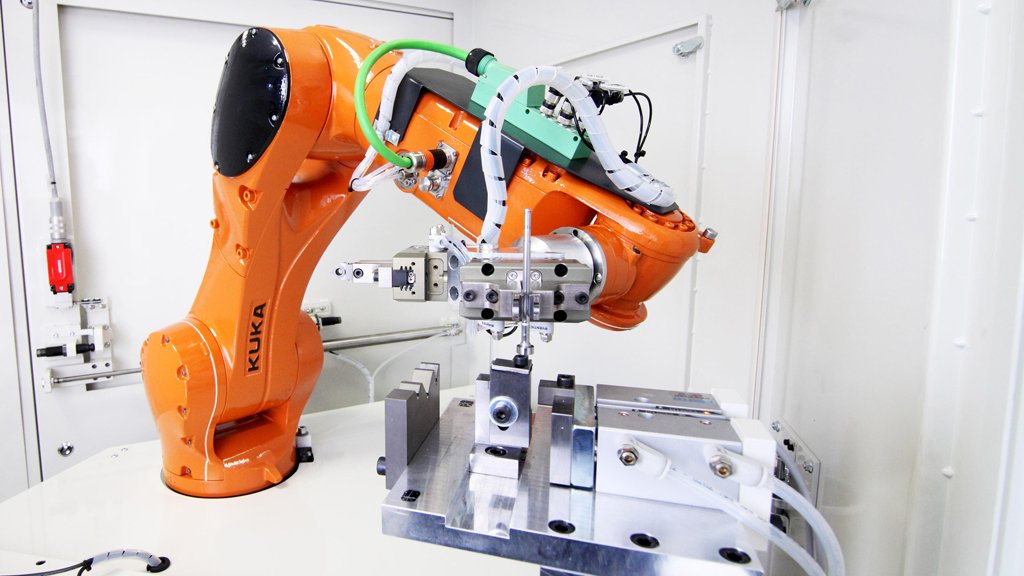 Другие процессы
Другие процессы
Сюда входят роботы для инспекции, гидроабразивной резки и пайки.
Пять основных типов промышленных роботов
Существует более пяти типов промышленных роботов, но по данным Международной федерации робототехники, наиболее распространенные из них могут (и должны быть) классифицированы по их механической конструкции.
Декартовы роботы
Они работают по трем линейным осям с использованием декартовой системы координат (X, Y и Z), что означает, что они используют три скользящих шарнира для перемещения вверх и вниз, внутрь и наружу и из стороны в сторону. Декартовы роботы — это наиболее часто используемые промышленные роботы, обычно для станков с ЧПУ или 3D-печати.
Роботы SCARA
Роботы с шарнирно-сочлененной манипуляцией (SCARA) избирательного соответствия имеют два параллельных шарнирных соединения, которые обеспечивают податливость в плоскости. Робот SCARA обычно используется для сборки и специализируется на боковых перемещениях.
Робот с шарнирно-сочлененной рамой
Имея от двух до 10 (или более) шарниров, шарнирные роботы соединяются с основанием с помощью скручивающего шарнира. Напоминающие человеческую руку, они обычно используются в упаковке, окраске, литье металлов и других промышленных применениях.
Дельта Роботы
Эти паукообразные роботы, широко используемые в производстве в пищевой, фармацевтической и электронной промышленности, связаны общей базой. Дельта-робот обычно используется для быстрого захвата и размещения из-за его точности на высокой скорости.
Цилиндрические роботы
Считается, что этот компактный робот хорошо подходит для ограниченного пространства, имеет как минимум одно поворотное соединение для вращательного движения и призматическое соединение для линейного движения. Общие приложения цилиндрических роботов включают простую сборку, литье под давлением, а также загрузку и разгрузку машин.
Будущее промышленных роботов и приложений
Хотя исторически они могли быть наиболее распространенными приложениями и типами промышленных роботов, сегодняшние роботы меньше связаны с их механической структурой. Они сборщики данных. Ранние поколения роботов нужно было разделить в своем собственном мире, а сегодня их можно интегрировать в рабочую силу.
Они сборщики данных. Ранние поколения роботов нужно было разделить в своем собственном мире, а сегодня их можно интегрировать в рабочую силу.
Раньше роботов просили выполнять очень специфические задачи, обычно в фиксированном месте. Но сегодня совместное применение промышленных роботов стремительно развивается благодаря экологически безопасным датчикам, которые влияют на их форм-фактор и функциональность.Теперь эти совместные промышленные роботы, или коботы, работают вместе с операторами фабрик, выполняя лишь малую часть того, что делают люди. Распространение датчиков позволило им работать в среде с людьми и записывать информацию об окружающей среде. В результате мы можем собирать данные на каждом этапе производственного процесса для полной прослеживаемости и подробного анализа данных, чтобы принимать лучшие решения на будущее.
Достижения в области робототехники также позволяют нам брать роботов с завода и делать их мобильными и автономными для совершенно новых приложений, например, в розничной торговле. Автономные роботы штурмом захватили продуктовые магазины в 2019 году, когда компания Ahold Delhaize представила робота Badger Technologies, который разработан для улучшения работы магазинов. Оснащенный многочисленными датчиками, навигационными системами и камерами, робот вместе с сотрудниками и покупателями перемещается по проходам в магазинах, чтобы сканировать полы на предмет опасных условий, таких как разливы. Одновременно робот хранит запасы недостающих, неправильно оцененных или неуместных запасов. Но в будущем автономные роботы будут работать во всех сферах розничной торговли, от склада до доставки.
В других отраслях, например в сельском хозяйстве, дроны-роботы могут обследовать поле, чтобы найти недостатки в сельскохозяйственных культурах. Они могут анализировать уровни воды и сухости, определяя спелость продукта. Мобильные роботы и дроны контролируют нефте- и газопроводы и системы электропередачи, выполняя регулярные проверки и выявляя признаки необходимости технического обслуживания, чтобы эффективно направлять бригады технического обслуживания.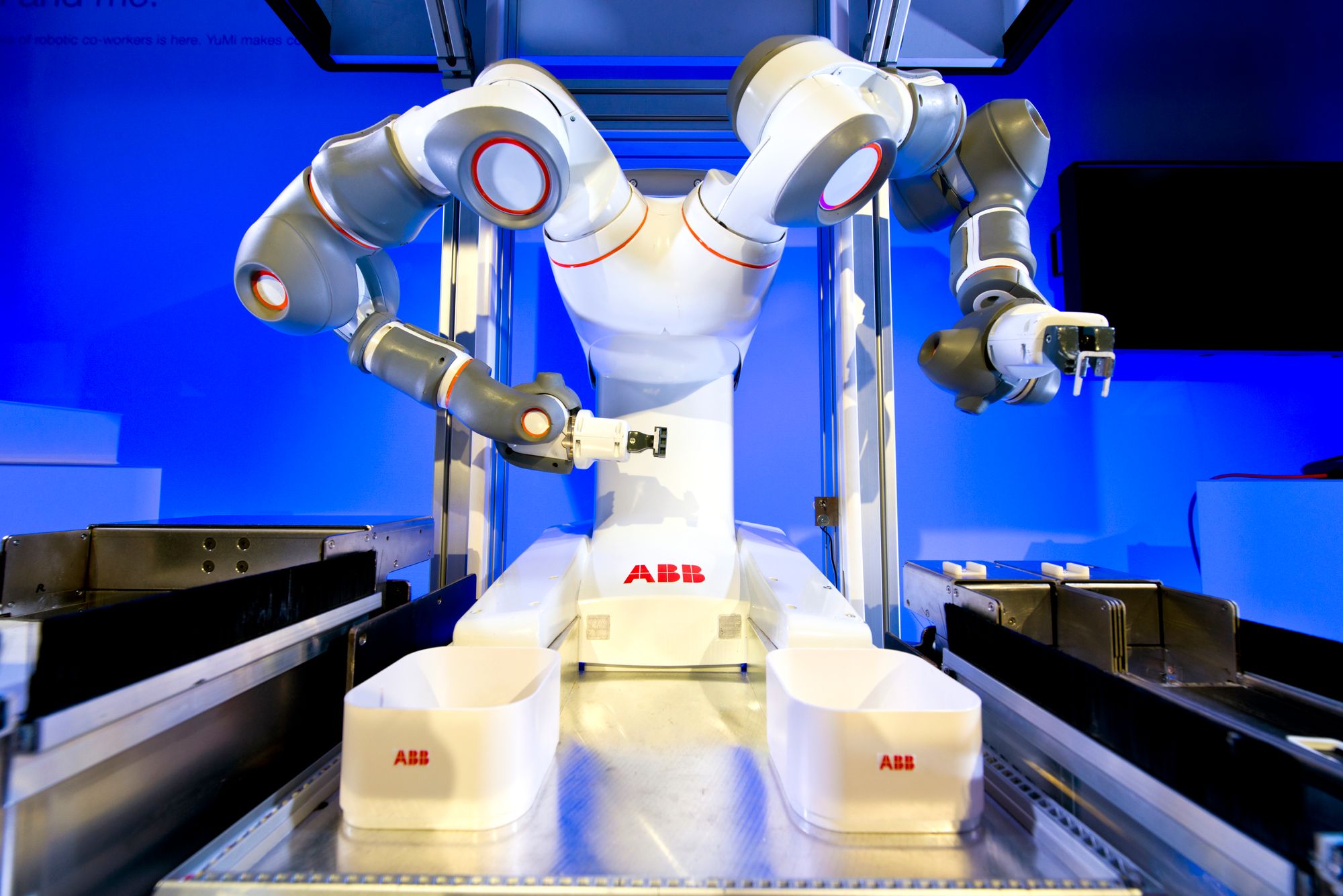
По своей сути, роботы по-прежнему выполняют рутинные, монотонные и трудоемкие задачи, которые не нравятся сотрудникам, предоставляя при этом бесценные данные для улучшения работы.Без датчиков и других последних достижений все это было бы невозможно. Искусственный интеллект (ИИ), конечно же, является ключевой частью разговора. ИИ изменит возможности робототехники, но это еще как минимум десять лет. В то же время ИИ может помочь компаниям собрать группу роботов, которые выполняют ту же задачу, и предоставить все данные в централизованное место, которое, в свою очередь, может быть использовано для того, чтобы сделать всю эту сеть роботов умнее и эффективнее.
В промышленной робототехнике успех зависит от экспонент.Он использует экспоненциальные технологические кривые в смежных с роботами отраслях, чтобы стимулировать их внедрение. Трудно продвигать технологические инновации в отрасли, но когда вы перенимаете технологии из «внешних» отраслей, возможности безграничны. Индустрия робототехники только начинается.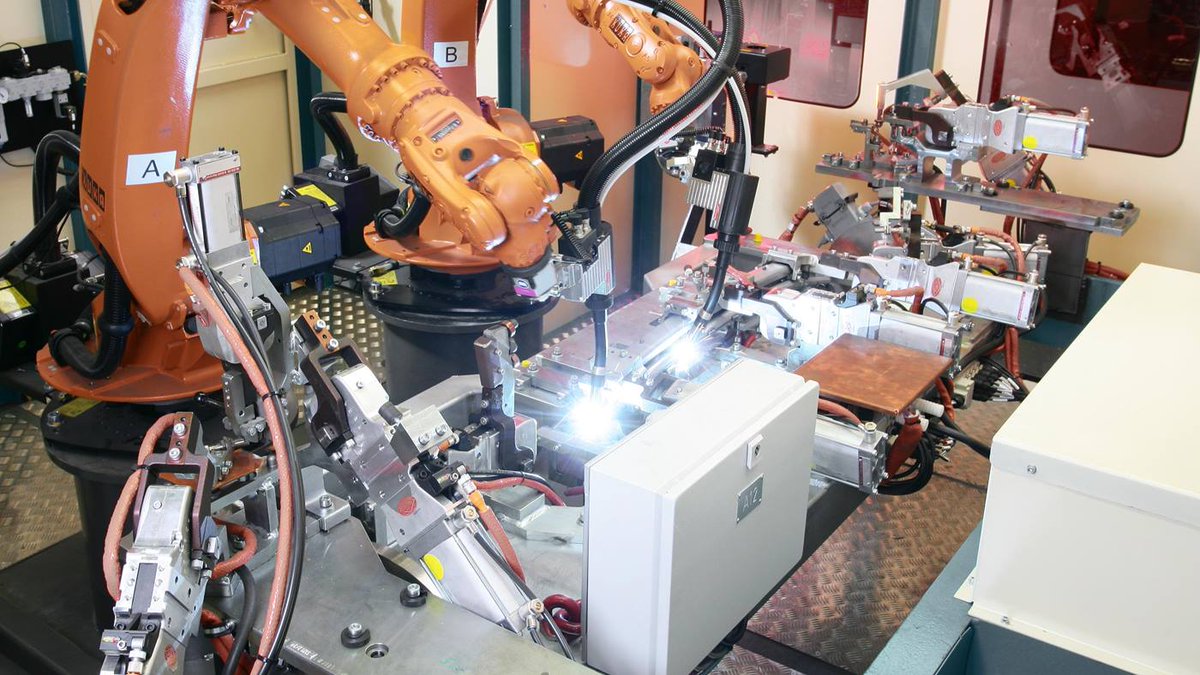
FAQ: КАКИЕ ТИПЫ ПРОМЫШЛЕННЫХ РОБОТОВ
КАКОВЫ ВИДЫ ПРОМЫШЛЕННЫХ РОБОТОВ?
Добавление автоматизированных роботизированных систем на завод экономит деньги, создает детали более высокого качества и увеличивает производство.Существует шесть типов промышленных роботов, которые можно классифицировать по типу движения, потребностям приложения, требованиям к радиусу действия и полезной нагрузке, а также предпочтениям производителя. Типы роботов: шарнирный, декартово, цилиндрический, полярный, SCARA и дельта. Подробнее о каждом типе промышленных роботов читайте ниже.
Не уверены, какой робот лучше всего подходит для вашего приложения? Эксперты elliTek по автоматизации всегда готовы помочь! Позвоните нам по телефону (865) 409-1555 или заполните контактную форму здесь.
СОСТАВЛЯЕМЫЕ РОБОТЫ
Роботы Motoman серии GP
Роботы Motoman GP позволяют сократить время цикла и время простоя.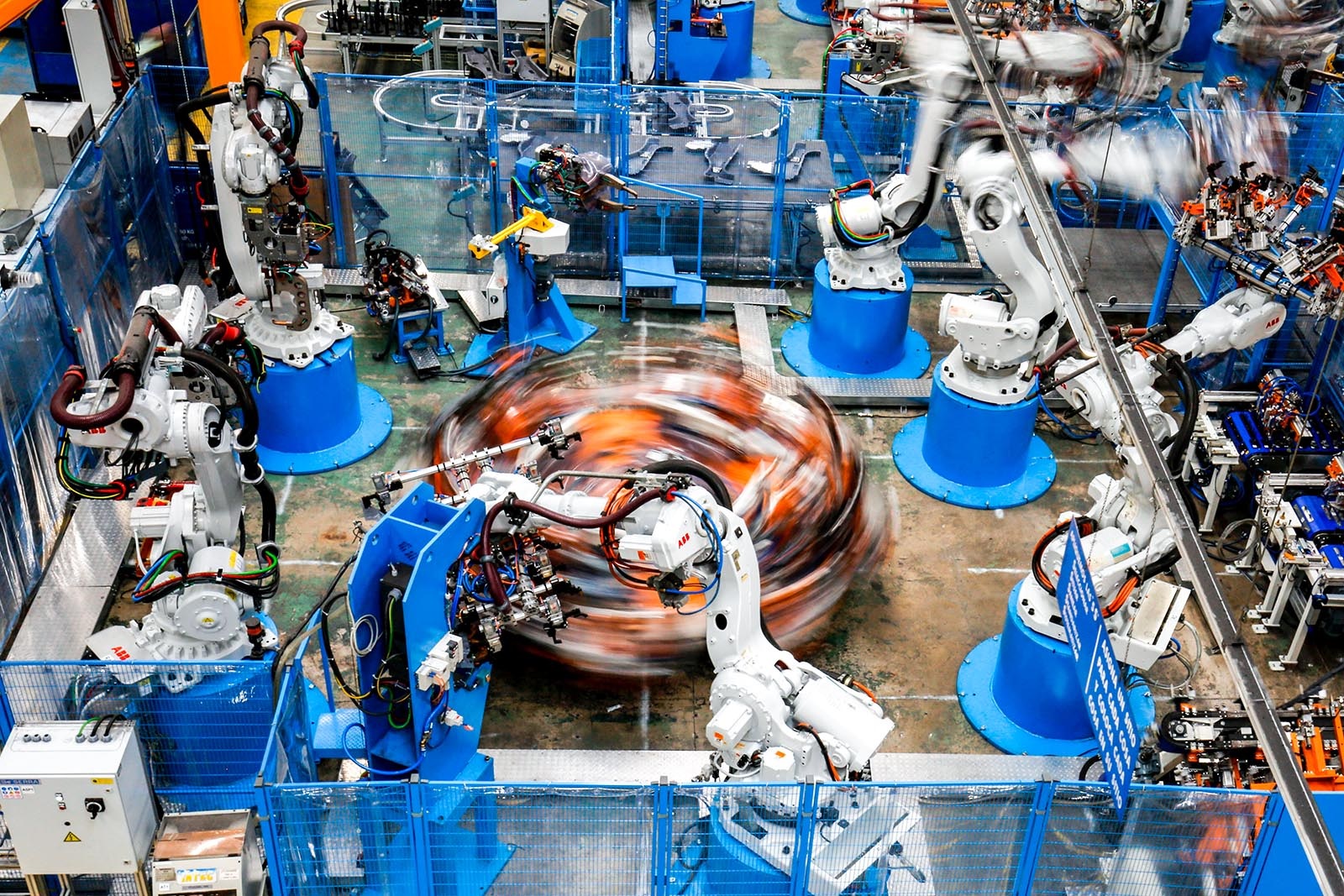
нажмите для увеличения
FANUC LR Mate Серия роботов
Роботы LR Mate от FANUC компактны, быстры и точны.
нажмите для увеличения
Роботы Motoman серии GP
С помощью роботов Motoman GP вы можете сократить время цикла и время простоя.
нажмите для увеличения
Это наиболее распространенные типы роботов на производстве.Шарнирно-сочлененные роботы имеют поворотные шарниры, также называемые осями. Диапазон движения зависит от количества осей. Конструкция осей шарнирных роботов может варьироваться от двух до десяти и более осей, из которых наиболее распространены шесть осей.
Роботы с шарнирно-сочлененной рамой похожи на человеческую руку и могут вращать все суставы или оси. Серводвигатели робота используются для движения каждой оси. Это обеспечивает точность и скорость. Эти роботы могут двигаться тремя способами: по тангажу вверх и вниз, по рысканью вправо и влево, и крен — это именно то, что вам нужно — вращение.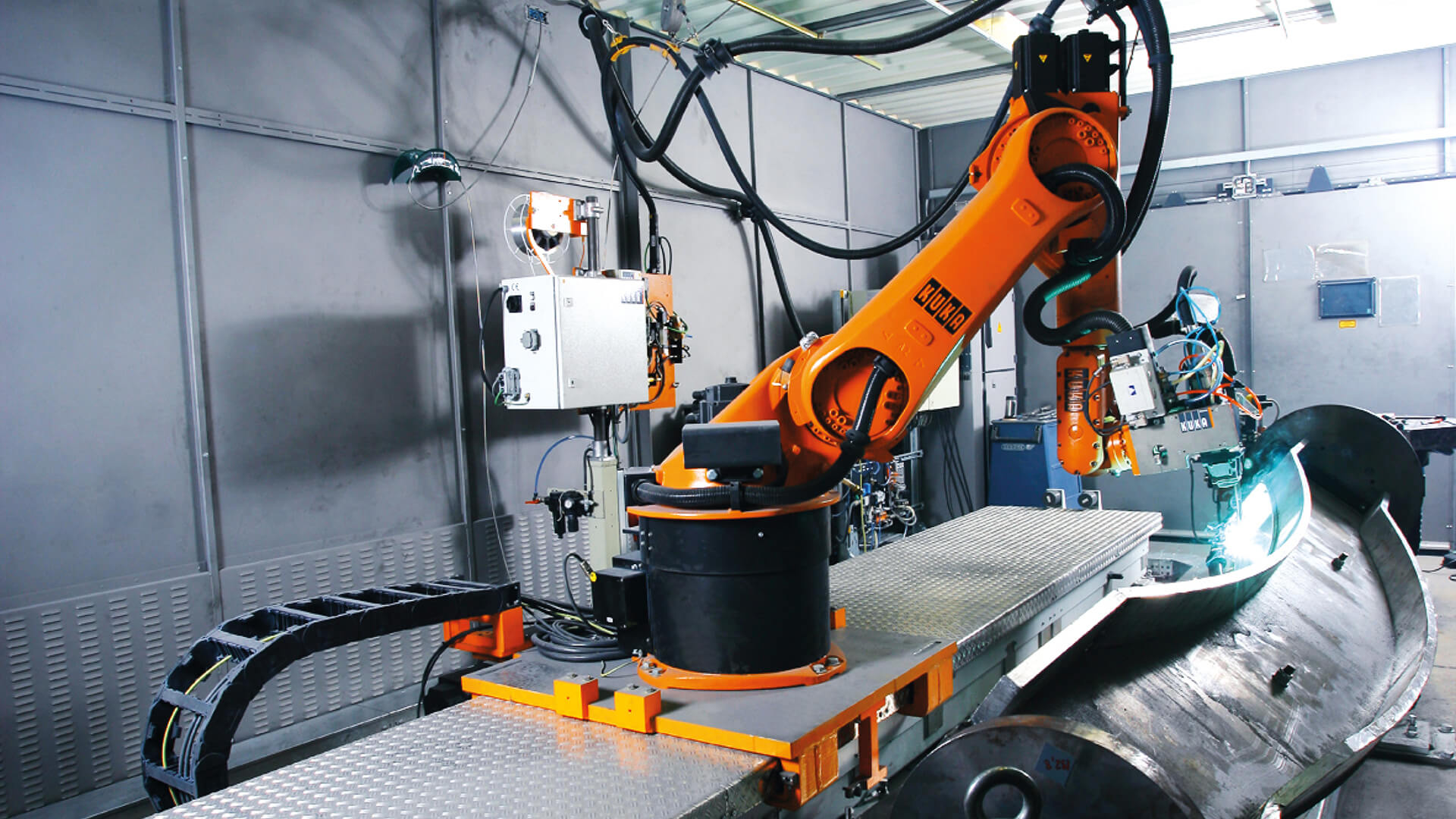 Такая мобильность делает шарнирных роботов отличным выбором для дуговой сварки, сборки, упаковки, покраски, укладки на поддоны, перемещения деталей, захвата и размещения, обслуживания машин и погрузочно-разгрузочных работ. Некоторые шарнирные роботы даже предназначены для выполнения нескольких задач.
Такая мобильность делает шарнирных роботов отличным выбором для дуговой сварки, сборки, упаковки, покраски, укладки на поддоны, перемещения деталей, захвата и размещения, обслуживания машин и погрузочно-разгрузочных работ. Некоторые шарнирные роботы даже предназначены для выполнения нескольких задач.
Гибкость шарнирных роботов позволяет им легко адаптироваться к производственному процессу или замене деталей, что делает их идеальными для производства. Прочтите о различиях между промышленными роботами-манипуляторами и коллаборативными роботами.
Специалисты elliTek по автоматизации могут помочь вам найти подходящего шарнирно-сочлененного робота для вашего конкретного применения. Позвоните нам по телефону (865) 409-1555 или заполните контактную форму здесь.
КАРТСИАНСКИЕ РОБОТЫ
Декартовы роботы движутся линейно, прямолинейно, в отличие от вращательного движения. У них есть три оси управления (X, Y, Z), которые являются линейными и расположены под прямым углом друг к другу. Основная ось (X) полностью поддерживается, тогда как оси Y и Z являются консольными, что означает, что их жесткая конструкция проходит горизонтально и поддерживается на одном конце.Оси работают вместе в скоординированном движении через общий контроллер движения.
Основная ось (X) полностью поддерживается, тогда как оси Y и Z являются консольными, что означает, что их жесткая конструкция проходит горизонтально и поддерживается на одном конце.Оси работают вместе в скоординированном движении через общий контроллер движения.
Декартовы роботы могут использоваться в некоторых из тех же приложений, что и роботы SCARA и шарнирно-сочлененные, и имеют некоторые из тех же технических характеристик. У декартовых роботов есть некоторые преимущества перед роботами SCARA и Articulated. Декартовы роботы имеют прямоугольную рабочую зону, поэтому используется вся рабочая зона. С другой стороны, шарнирно-сочлененные роботы и роботы SCARA имеют круглую рабочую зону, что может привести к образованию неиспользуемого пространства, особенно если это большая досягаемость.
По точности и повторяемости позиционирования декартовы роботы могут превосходить роботы с шарнирно-сочлененной рамой и типы SCARA, поскольку они могут быть изготовлены практически из любого типа линейного привода с множеством приводных механизмов, таких как шариковый или ходовой винт, ремень, пневматический привод или линейный двигатель. Возможны реечные и шестеренные приводы, но они обычно используются в портальных системах с очень большим ходом. Декартовых роботов проще программировать, потому что они имеют три оси, а не несколько осей вращения.
Возможны реечные и шестеренные приводы, но они обычно используются в портальных системах с очень большим ходом. Декартовых роботов проще программировать, потому что они имеют три оси, а не несколько осей вращения.
Благодаря своей жесткой конструкции декартовы роботы могут нести большую полезную нагрузку. Они могут выполнять такие функции, как подбор и размещение, загрузка и разгрузка, погрузочно-разгрузочные работы, сборка и выдача.
В некоторых приложениях эту работу могут выполнять декартовы роботы, роботы SCARA или шарнирные роботы. Чтобы определить, какой робот подходит для вашего приложения, обратитесь к одному из наших экспертов по автоматизации.
ЦИЛИНДРИЧЕСКИЕ РОБОТЫ
Цилиндрические роботы похожи на декартовых роботов по их оси движения.Большинство цилиндрических роботов имеют линейные и поворотные приводы. У них цилиндрическая рабочая зона, что делает их идеальными для небольших помещений. Цилиндрические роботы могут использоваться для сборочных операций, работы со станками и машинами для литья под давлением, а также для точечной сварки. Эти стационарные роботы довольно просты в установке и использовании.
ПОЛЯРНЫЕ РОБОТЫ
Полярные роботы также называются сферическими роботами, поскольку оси образуют полярную систему координат.Плечо имеет два поворотных шарнира и один линейный шарнир, соединенный с поворотным основанием с помощью скручивающего шарнира. У них сферическая рабочая оболочка. Роботы Polar хорошо подходят для простых применений, таких как литье под давлением, литье под давлением, транспортировка материалов, дуговая сварка и газовая сварка. Эти стационарные роботы-манипуляторы были одними из первых в производстве. Полярные роботы используются редко из-за достижений в области промышленной робототехники.
SCARA
Робот FANUC SCARA SR-6iA фото
Роботы FANUC SR-6iA превосходно подходят для сборки, захвата и размещения, проверки и упаковки, требующих полезной нагрузки до 6 кг.Имея небольшой размер, SR-6iA обеспечивает скорость и точность в диапазоне 360 °.
нажмите для увеличения
Робот FANUC SCARA SR-6iA диаграмма
Скорость, точность и маневренность, предлагаемые роботами FANUC SCARA, позволяют повысить производительность и эффективность вашего бизнеса.
нажмите для увеличения
Motoman SCARARobot MYS650LF диаграмма
Роботы Motoman SCARA обеспечивают превосходную производительность в таких приложениях, как сборка, дозирование, комплектование деталей, обработка мелких деталей, упаковка ящиков, лабораторная автоматизация, упаковка, солнечная энергия и обработка полупроводников.
нажмите для увеличения
Робот FANUC SCARA SR-6iA фото
Роботы FANUC SR-6iA превосходно подходят для сборки, подбора и размещения, проверки и упаковки, требующих полезной нагрузки до 6 кг. Имея небольшой размер, SR-6iA обеспечивает скорость и точность в диапазоне 360 °.
нажмите для увеличения
SCARA — это аббревиатура от манипулятора робота с избирательным соответствием в сборе или шарнирно-сочлененной руки робота с избирательным соответствием. Это означает, что он податлив по оси X-Y и жесткий по оси Z.Для небольших роботизированных сборок производители обычно обращаются к SCARA из-за их низкой стоимости и высокой скорости.
Это означает, что он податлив по оси X-Y и жесткий по оси Z.Для небольших роботизированных сборок производители обычно обращаются к SCARA из-за их низкой стоимости и высокой скорости.
Роботы
SCARA имеют четыре оси или степени свободы. Робот SCARA движется в плоскостях X, Y, Z как декартово робот; однако у SCARA есть ось тета на конце плоскости Z, чтобы вращать конец инструмента рычага (EOAT). Это делает роботов SCARA хорошим выбором для вертикальной сборки. Однако рука подобна рычагу, ограничивающему радиус действия роботов SCARA.Когда рычаг выдвигается, в соединениях требуются прочные подшипники и двигатели с высоким крутящим моментом, чтобы выдерживать нагрузки.
Роботы
SCARA обычно имеют цилиндрическую рабочую зону. Общая длина первого и второго рычагов определяет диаметр круга, а ход по оси Z определяет глубину цилиндра.
Роботы
SCARA обладают отличной повторяемостью, что делает их хорошим выбором для дозирования. Они также являются наиболее популярными геометрическими фигурами для вертикальной сборки и операций по подъему мелких деталей. Кроме того, роботов SCARA можно использовать для лазерной гравировки и 3D-печати.
Кроме того, роботов SCARA можно использовать для лазерной гравировки и 3D-печати.
Для получения дополнительной информации о роботах SCARA свяжитесь с командой elliTek по робототехнике или заполните контактную форму здесь.
DELTA ROBOTS
Motoman Delta Robot MPP3H photo
Роботы Motoman MPP3H Delta идеально подходят для первичной упаковки с производительностью, оптимизированной для полезной нагрузки.
нажмите для увеличения
Motoman Delta Robot Схема MPP3H
Роботы Motoman MPP3H Delta имеют 3 штуки.0 кг
Полезная нагрузка, используйте контроллер FS100, вылет по горизонтали 1300 мм и вылет по вертикали 600 мм.
нажмите для увеличения
FANUC Delta Robot M-iA0.5A схема
Эти дельта-роботы могут работать под любым углом, это идеальный выбор для приложений (таких как сборка и сборка), требующих гибкости и высокого уровня повторяемости.
нажмите для увеличения
Motoman Delta Robot MPP3H photo
Motoman MPP3H Delta Robots идеально подходят для первичной упаковки с оптимизированной производительностью для полезной нагрузки.
нажмите для увеличения
Дельта-роботы — это роботы с параллельными руками, которые также могут называться роботами-пауками. У них есть три рычага, которые соединяются с универсальными шарнирами в основании. Соединения на обоих концах каждого параллельного стержня обычно свободно перемещаются в шаровых шарнирах. Инструмент конца руки (EOAT) может быть прикреплен к нижней платформе. Роботы Delta могут иметь от трех до шести осей, большинство из которых имеют четыре оси или степени свободы, позволяющие вращать объекты.
В приложениях, требующих высокой скорости и малой полезной нагрузки, можно использовать роботов Delta.Они могут быстро собирать продукты группами и размещать их в сборочном шаблоне или контейнере.