
Регулирование скорости вращения двигателей постоянного тока
Электропривод, построенный на основе двигателей постоянного тока используются в металлургической, машиностроительной, химической, угольной, деревообрабатывающей и других отраслях промышленности.
Применение электропривода способствует созданию промышленного оборудования, в том числе станков с высокой степенью автоматизации. При этом в автоматизированном электроприводе главное место занимает такая задача, как регулирование скорости вращения двигателей постоянного тока.
Основные способы управления скоростью вращения двигателя постоянного тока:
1) изменение тока в цепи обмотки возбуждения при стабильном напряжении на обмотке якоря;
2) изменение напряжения на обмотке якоря при стабильном токе в цепи обмотки возбуждения;
3) изменение напряжения на обмотке якоря, а также изменение тока в цепи обмотки возбуждения.
Для изменения величин напряжения на обмотке якоря или силы тока в цепи обмотки возбуждения применяются чаще всего управляемые выпрямители. Для работы в промышленном оборудовании используются однофазные и трехфазные выпрямители, собранные по мостовой схеме. При этом конструктивное исполнение двигателей постоянного тока способствует тому, что необходимая мощность выпрямителей для цепи обмотки возбуждения намного меньше мощности выпрямителя для обмотки якоря. Однако, существуют также и недостатки регулирования частоты вращения двигателя изменением силы тока в цепи обмотки возбуждения. Основным недостатком является уменьшение быстродействия исполнения задаваемой скорости, другими словами, худшие динамические свойства автоматизированого электропривода. Для некоторых применений эти показатели являются не критичными, поэтому при проектировании следует руководствоваться требованиями к приводу в соответствии с техническим заданием. Восстановление драйверов электродвигателей постоянного тока отличается от ремонта частотных преобразователей, используемых в системах управления асинхронными двигателями переменного тока, так как используется различный принцип управления и соответственно разная схемотехника.
Для работы в промышленном оборудовании используются однофазные и трехфазные выпрямители, собранные по мостовой схеме. При этом конструктивное исполнение двигателей постоянного тока способствует тому, что необходимая мощность выпрямителей для цепи обмотки возбуждения намного меньше мощности выпрямителя для обмотки якоря. Однако, существуют также и недостатки регулирования частоты вращения двигателя изменением силы тока в цепи обмотки возбуждения. Основным недостатком является уменьшение быстродействия исполнения задаваемой скорости, другими словами, худшие динамические свойства автоматизированого электропривода. Для некоторых применений эти показатели являются не критичными, поэтому при проектировании следует руководствоваться требованиями к приводу в соответствии с техническим заданием. Восстановление драйверов электродвигателей постоянного тока отличается от ремонта частотных преобразователей, используемых в системах управления асинхронными двигателями переменного тока, так как используется различный принцип управления и соответственно разная схемотехника.
Если технологический процесс включает необходимость изменения направления вращения двигателя(реверс), эта возможность также может быть выполнена одним из способов — в цепи обмотки якоря или обмотки возбуждения. Такая возможность реализуется изменением полярности управляющего постоянного напряжения или тока.
Примеры работ
Услуги
Контакты
Время выполнения запроса: 0,00397300720215 секунд.
Лекция 35 Регулирование скорости ДПТ. ч2
Регулирование скорости ДПТ. Ч 2.
Регулирование скорости вращения двигателя независимого возбуждения изменением напряжения якоря. В тех случаях, когда двига-
тель предназначен для работы в условиях широко переменной скорости, наиболее целесообразным в отношении использования двигателя и надежности его работы является способ изменения его скорости с помощью изменения напряжения на якоре при независимом возбуждении, позволяющий иметь полную величину потока при всех скоростях.
В том случае, когда напряжение на зажимах двигателя можно регулировать плавно от нулевого значения до наибольшего, можно иметь не только широкую, экономичную и плавную регулировку скорости двигателя, но и безреостатный пуск его в ход без потерь в пусковом реостате.
Наиболее типичными системами подобного рода являются: А) система Леонарда или система генератор-двигатель (сокращенно ГД) и Б) система Леонарда-Ильгнера или система генератордвигатель с маховиком (сокращенно ГДМ). Одна из возможных принципиальных схем системы ГД показана на рис. 5.18.
Здесь ПД – первичный двигатель трехфазного тока, сочле-
Рис.Рис5.18. .Схемасистемысистемы« генератор«генератор– двигатель-» ненный на одном валу с генера-
двигатель»
тором постоянного тока Г и образующий совместно с последним систему, предназначенную для преобразования энергии перемен-
ного тока в энергию постоянного тока; Д исполнительный двигатель постоянного тока. Обмотки возбуждения ОВГ генератора и двигателя ОВД питаются от независимого источника – сети постоянного тока. (рис. 5.18.)
(рис. 5.18.)
В общем случае генератор постоянного тока может питать несколько двигателей постоянного тока, если они работают в одинаковых условиях. Вместо асинхронного двигателя часто, в особенности при больших и средних мощностях, применяют синхронные двигатели, вращающиеся со строго постоянной скоростью.
Для возбуждения иногда применяют отдельные возбудительные агрегаты, состоящие из небольшого асинхронного двигателя и возбудителя.
При пуске в ход мы уменьшаем при помощи реостата ток возбуждения генератора и, следовательно, подводимое к двигателю напряжение так, чтобы должным образом ограничить пусковой ток двигателя и в то же время позволить ему взять с места с некоторым ускорением. Тем самым отпадает надобность в пусковом реостате, снижаются потери энергии в период пуска и облегчается управление операцией.
Регулирование скорости вращения по системе ГД ведется при заданном значении тока Ia , например, Ia Iн сonst . При этом изменение скорости от нуля до некоторого низшего предела ведется при постоянном потоке д двигателя постоянного тока путем повышения напряжения генератора Uг . В этих условиях развиваемый двигателем момент М См дIa сonst, а мощность P M2 n n. Так как
В этих условиях развиваемый двигателем момент М См дIa сonst, а мощность P M2 n n. Так как
| n | U IaRa | СUг , |
|
| ||
|
| Ce д | |
то | Рд Uг , т.е. мощность двигателя пропорциональна напряжению | ||
Uг | на зажимах генератора. | ||
| Дальнейшее увеличение скорости ведется при постоянном на- | ||
пряжении генератора Uг const путем уменьшения потока двигателя
д . В этих условиях мощность, потребляемая двигателя
Pд UгIa const .
Таким образом, на первом этапе регулирование скорости ведется при постоянном моменте, на втором – при постоянной мощности.
В мощных прокатных установках (5. .10 тыс. кВт) с большим числом реверсов в единицу времени (12..20 в минуту) применяется так называемая квадратичная система ГД, в которой генератор и двигатель постоянного тока имеют каждый свой особый возбудитель, причем управление установкой производится изменением тока в цепи возбуждения возбудителей. Это весьма упрощает и облегчает управление, поскольку мощности возбудителей не превышают 2..3% от мощности главных машин. В качестве возбудителей системы ГД используют электромашинные усилители, автоматизирующие работу установки и этим повышающие ее производительность. Система ГД позволяет получить быстрый пуск и реверсирование исполнительного двигателя без потерь в реостатах главной цепи. Для осуществления реверса дос-
.10 тыс. кВт) с большим числом реверсов в единицу времени (12..20 в минуту) применяется так называемая квадратичная система ГД, в которой генератор и двигатель постоянного тока имеют каждый свой особый возбудитель, причем управление установкой производится изменением тока в цепи возбуждения возбудителей. Это весьма упрощает и облегчает управление, поскольку мощности возбудителей не превышают 2..3% от мощности главных машин. В качестве возбудителей системы ГД используют электромашинные усилители, автоматизирующие работу установки и этим повышающие ее производительность. Система ГД позволяет получить быстрый пуск и реверсирование исполнительного двигателя без потерь в реостатах главной цепи. Для осуществления реверса дос-
Рис. 5.19. Скоростные и механические характеристики двигателя при плавном изменении напряжения, подводимого к цепи якоря
таточно изменить на обратное направление тока возбуждения генератора постоянного тока при помощи переключателя П. (рис. 5.18.).
Торможение двигателя также производится путем регулирования напряжения генератора. При этом, если, быстро уменьшив возбуждение генератора, сделать его ЭДС меньше ЭДС двигателя, то последний переходит в генераторный режим и возвращает энергию торможения обратно в сеть через генератор, который в этих условиях работает двигателем, заставляя работать генератором приводной двигатель переменного тока.
При этом, если, быстро уменьшив возбуждение генератора, сделать его ЭДС меньше ЭДС двигателя, то последний переходит в генераторный режим и возвращает энергию торможения обратно в сеть через генератор, который в этих условиях работает двигателем, заставляя работать генератором приводной двигатель переменного тока.
Если при работе системы ГД получаются резкие пики тока, то на вал приводного двигателя насаживают маховик, запасающий энергию в период увеличения скорости двигателя и отдающий ее при уменьшении скорости. В этой системе (ГДМ) применяется в качестве приводного только асинхронный двигатель, так как синхронный двигатель вращается с постоянной скоростью и, следовательно, не позволяет использовать энергию маховика.
Система ГДМ дает возможность выровнять нагрузки и сильно сгладить пики тока в питающей сети переменного тока. Благодаря маховику мощность асинхронного двигателя часто можно выбрать меньше мощности двигателя постоянного тока.
В системах ЭМУ – Д генератор заменяется электромашинным усилителем, в системах МУ
– Д вместо генератора применяется магнитный усилитель. В последнее время генератор заменяется тиристорным преобразователем (ТП). По сравнению с системой Г– Д установки ТП – Д имеют меньшую массу и больший КПД.
В последнее время генератор заменяется тиристорным преобразователем (ТП). По сравнению с системой Г– Д установки ТП – Д имеют меньшую массу и больший КПД.
Скоростные n f Ia и механические n f M характеристики двигателя независимого возбуждения Iв , Ra const и U var по-
казаны на рис. 5.19.
Они представляют собой параллельные друг другу линии, поскольку при одном и том же токе якоря Ia падение напряжения
Ia Ra и размагничивающее действие реакции якоря остаются одина-
ковыми для всех характеристик.
Частным случаем регулирования изменением напряжения является импульсное регулирование напряжения. В этом случае постоянное по значению и направлению напряжение периодически подается
на якорь в виде отдельных импульсов (рис. 5.20). |
|
|
|
|
|
|
| ||||
|
| При таком питании сред- | |||||||||
|
| нее значение |
| напряжения | на | ||||||
U |
| якоре, которое определяет час- | |||||||||
| Uср | тоту вращения двигателя, равно | |||||||||
|
|
|
|
|
| и |
|
|
|
| |
t | t | Uср |
|
| t |
|
| U , (5. | |||
|
| ||||||||||
и |
| T U |
| ||||||||
Tц |
| где tи |
|
|
| ц |
|
|
| ||
Рис. 5.20. Импульсное регулирова- | и Tц – продолжитель- | ||||||||||
ние напряжения |
| ность импульса и периода их | |||||||||
|
| следования, соответственно. |
| ||||||||
|
| При импульсном питании | |||||||||
Ia mах Ia min | Ia ср | в установившемся | режиме | ток | |||||||
якоря | Ia будет иметь пульси- | ||||||||||
|
| рующий характер, как показано | |||||||||
tи | t | на рис. |
|
|
|
|
|
|
| ||
Пульсирующий ток якоря | |||||||||||
Tц |
| можно | разложить | на | среднюю | ||||||
Рис. 5.21. Изменение тока якоря при | (постоянную) | Iaср | и | перемен- | |||||||
импульсном регулировании напря- | ную составляющие. Вращаю- | ||||||||||
жения |
| щий момент двигателя создается | |||||||||
 17)
17) 5.21.
5.21.постоянной составляющей тока. Переменная составляющая увеличивает потери и нагрев двигателя, а также ухудшает коммутацию. Особенно опасен режим прерывистого тока, когда Ia min 0 в течении некоторого времени. Поэтому при
Поэтому при
использовании импульсного регулирования напряжения приходится снижать номинальную мощность двигателя, или применять меры для уменьшения переменной составляющей тока (например, с помощью сглаживающих фильтров). Пульсации тока якоря приводят к пропорциональным пульсациям электромагнитного момента и частоты вращения. Пульсации скорости при необходимости могут быть уменьшены путем искусственного увеличения момента инерции привода.
Регулирование частоты вращения изменением напряжения якоря было рассмотрено на примере двигателей параллельного и независи-
мого возбуждения. Однако все сказанное применимо и для двигателей последовательного и смешанного возбуждения. Путем изменения подводимого напряжения можно получить диапазон регулирования скорости от 10:1 до 100:1. Кроме того при этом способе регулирования частоты вращения КПД двигателя практически остается неизменным. Регулирование целесообразно осуществлять при постоянном моменте.
Регулирование скорости вращения двигателя последовательного возбуждения. Существуют следующие способы регулирования скорости вращения последовательного двигателя: а) изменением потока возбуждения Ф шунтированием или секционированием обмотки возбуждения, б) шунтированием обмотки якоря (рис. 5.22), в) включением сопротивления в цепь якоря (рис. 5.23), г) изменением напряжения.
Существуют следующие способы регулирования скорости вращения последовательного двигателя: а) изменением потока возбуждения Ф шунтированием или секционированием обмотки возбуждения, б) шунтированием обмотки якоря (рис. 5.22), в) включением сопротивления в цепь якоря (рис. 5.23), г) изменением напряжения.
Регулирование скорости вращения шунтированием обмотки возбуждения. Предположим, что U const, Mс const и что задан ток Ia при работе нешунтированного двигателя, т.е. при разомкнутом рубильнике (автомате) p1. При замыкании рубильника р1 режим ра-
боты двигателя резко изменяется, но так как обмотка возбуждения обладает значительной электромагнитной инерцией, то потокосцепления этой обмотки и, стало быть, создаваемый ею магнитный поток 1 и
ток возбуждения стремятся остаться без изменения. Поэтому в ближайший после шунтирования момент времени ток в обмотке якоря
увеличится | на | величину тока | в | шунте Iш и | составляет | |
Ia | Iв1 Iш1 |
| Ia1 Iш1. | Iш1) = | ||
См 1I1 Mc, | и на валу двигателя появляется положительный дина- | |||||
мический момент MJ М Мс , | под действием которого двигатель | |||||
начинает развивать большую скорость. |
|
| ||||
 Следовательно, М См 1(Ia1
Следовательно, М См 1(Ia1Рис. 5.24. Регулированиескорости двигателя последовательного возбуждения шунтированием обмотки возбуждения
Рис. 5.22. Схема регулирования скоростивращения двигателя последовательноговозбуждения
Рис. 5.23. Схема регулирования скорости вращения двигателя последовательного возбуждения включением сопротивления в
цепь якоря
Если пренебречь небольшим падением напряжения в цепи якоря, то уравнение ЭДС напишется в виде U =Ce n; отсюда видно,
что при увеличении n поток будет уменьшаться и, следовательно, будет уменьшаться ток Iв ; это повлечет за собою
уменьшение тока в шунте Iш (закон разветвленных цепей) и тока в якоре Ia Iв Iш (рис. 5.24). Этот процесс параллельного изменения скорости n и токов Iв и Ia продолжается до
5.24). Этот процесс параллельного изменения скорости n и токов Iв и Ia продолжается до
тех пор, пока ток в якоре и поток возбуждения не приобретут таких значений Ia2 и 2 , при
которых M Cм 2Ia2 = Cм 1Ia1 Mc . При этом МJ 0 , и двига-
Рис. 5.25. Механические характеристики двигателя последовательного возбуждения приразных способах регулирования скорости вращения
тель начинает работать в новом установившемся режиме со скоростью
n | 2 | n | 1 | (рис. 5.24). Соответственно току I | a | 2 | увеличивается подво- | |
| ||||||||
| 1 | 2 |
|
| ||||
|
|
|
|
|
|
|
| |
димая | к | двигателю мощность P1 UIa2 ; |
| полезная мощность | ||||
P2 М2 n тоже увеличивается, причем КПД двигателя почти не из-
меняется, а при некоторых соотношениях между различными видами потерь может даже возрасти; в остальном оценка этого способа регулирования последовательного двигателя та же, что и в соответствующем случае двигателя параллельного возбуждения.
Рассматриваемый способ регулирования скорости широко применяется в электротяге. Коэффициент kо.п. называется коэффициентом регулирования. Обычно шунтирующее сопротивление выполняется регулируемым, так чтобы было kо.п. =75%, 61,5% и 50%, но в ряде слу-
чаев поле ослабляют еще сильнее. При работе тягового двигателя на линии приходится считаться с возможностью отрыва токоприемника от контактного провода, когда двигатель некоторое время идет без тока, и последующим включением его в сеть. Если обмотка возбуждения шунтирована только активным сопротивлением, то из-за её значительной индуктивности ток пойдет в первый момент после восстановления контакта с сетью только по шунтирующему сопротивлению. Двигатель не разовьет обратной ЭДС и ток включения может превы-
сить допустимые пределы. Чтобы избежать этого, делают шунтирующее сопротивление индуктивным с таким расчетом, чтобы распределение тока между обмоткой возбуждения и шунтом в переходном процессе приближалось к распределению тока при установившемся режиме.
Изменение магнитного потока в двигателях последовательного возбуждения осуществляется шунтированием обмотки возбуждения с помощью реостата rш (рис. 5.22). Чем меньше сопротивление rш , тем меньше ток возбужде-
ния Iв и магнитный поток и тем больше частота вращения.
Из-за ограничения максимальной скорости в машинах нормального исполнения диапазон регулирования частоты вращения путем изменения магнитного потока составляют (1,5..2,5):1. Регулирование частоты вращения изменением магнитного потока является одним из наиболее простых и экономичных способов и поэтому находит широкое применение. Из-за увеличения механических потерь при увеличении частоты вращения КПД двигателя будет несколько уменьшаться.
Регулирование скорости шунтированием обмотка якоря. При шунтировании обмотки якоря (рис. 5.22) рубильник р1 разомкнут,
рубильник р2 замкнут. Ход рассуждения остается тот же, но разница
та, что в данном случае в ближайший после шунтирования момент времени ток возбуждения остается без изменения, а ток в якоре уменьшается на величину тока, ответвившегося в шунтирующее сопротивление; вследствие этого появляется отрицательный момент ускорения, и двигатель начинает замедлять скорость своего вращения.
По окончании процесса ток в якоре будет меньше первоначального, а ток в обмотке возбуждения и, следовательно, ток, текущий из сети, увеличивается. Соответственно этому возрастает потребляемая
двигателем | мощность Р1 , тогда как | его полезная мощность |
Р2 2 nM2 | уменьшается. Отсюда следует, | что данный способ регу- |
лирования скорости двигателя последовательного возбуждения весьма неэкономичен. Поэтому он применяется только там, где стоимость электроэнергии не является существенным фактором и где, как, например, в литейных цехах, требуется на короткое время сильно уменьшить скорость двигателя. В некоторых установках скорость по этому способу регулируется в пределах 1:5 и выше.
На рис. 5.25 сопоставлены построенные в относительных единицах (Mн 1 и nн 1) механические характеристики последовательно-
го двигателя при различных способах регулирования скорости: кривая 1 – естественная механическая характеристика, кривые 2 и 3 соответствуют коэффициентам ослабления возбуждения Ко. в. 0,6 и
в. 0,6 и
Ко.в. 0,3, кривая 4 соответствует характеристике при шунтированной обмотке якоря, кривая 5 получена при включении сопротивления в цепь якоря, а кривая 6 представляет собой характеристику при U 0,5Uн
Регулирование скорости включением сопротивления в цепь якоря.
(рис. 5.23). Этот способ позволяет регулировать n вниз от номинального значения. Так как одновременно при этом значительно уменьша-
ется КПД, то такой способ регулирования находит ограниченное применение.
Характеристика n f (M) для такого способа регулирования ско-
рости при Rpa* = 0,5 изображена на рис. 5.26 в виде кривой 5.
Регулирование скорости изменением напряжения. Этим спосо-
бом можно регулировать n вниз от номинального значения с сохранением высокого КПД. Рассматриваемый способ регулирования широко применяется в транспортных установках, где на каждой ведущей оси устанавливается отдельный двигатель и регулирование осуществляется путем переключения двигателей с параллельного включения в сеть на последовательное (рис. 5.26). На рис. 5.25 кривая 6 представляет собой характеристику n f (M) для этого случая при U 0,5Uн .
5.26). На рис. 5.25 кривая 6 представляет собой характеристику n f (M) для этого случая при U 0,5Uн .
Рис. 5.26. Параллельное и последовательное включение двигателей последовательного возбуждения для изменения скорости вращения
Двигатель постоянного тока с параллельным возбуждением (независимым): принцип работы
Двигатель постоянного тока с параллельным возбуждением – это электродвигатель, у которого обмотки якоря и возбуждения подключаются друг к другу параллельно. Часто по своей функциональности он превосходит агрегаты смешанного и последовательного типов в случаях, если необходимо задать постоянную скорость работы.
Характеристики двигателя постоянного тока с параллельным возбуждением
Формула общего тока, идущего от источника, выводится согласно первому закону Кирхгофа и имеет вид: I = Iя + Iв, где Iя — ток якоря, Iв – ток возбуждения, а I – ток, который двигатель потребляет от сети.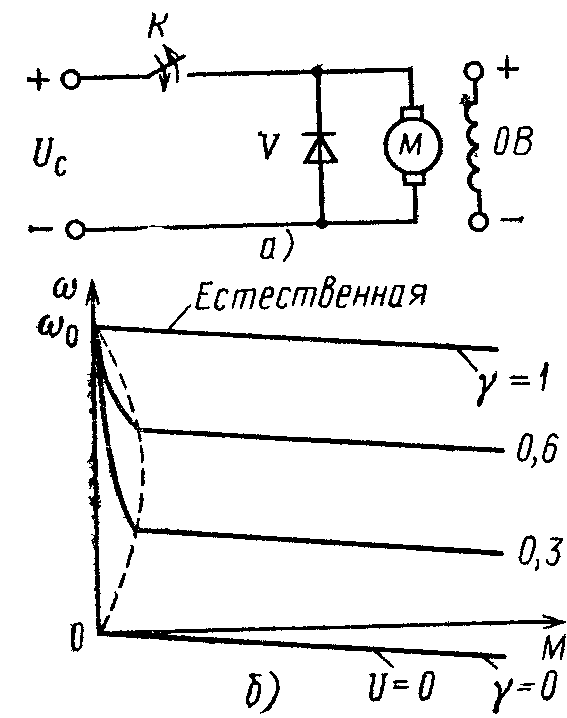 Следует отметить, что при этом Iв не зависит от Iя, т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
Следует отметить, что при этом Iв не зависит от Iя, т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
В целом, данные электродвигатели отличаются следующими весьма полезными тяговыми параметрами:
- Высокая экономичность (поскольку ток якоря не проходит через обмотку возбуждения).
- Устойчивость и непрерывность рабочего цикла при колебаниях нагрузки в широких пределах (т.к. величина момента сохраняется даже в случае изменения числа оборотов вала).
При недостаточном моменте пуск осуществляется посредством перехода на смешанный тип возбуждения.
Сферы применения двигателя
Поскольку частота вращения подобных двигателей остается почти постоянной даже при изменении нагрузки, а также может изменяться при помощи регулировочного реостата, они широко применяются в работе с:
- вентиляторами;
- насосами;
- шахтными подъемниками;
- подвесными электрическими дорогами;
- станками (токарными, металлорежущими, ткацкими, печатными, листоправильными и пр.
 ).
).
 ).
).Таким образом, этот вид двигателей в основном используется с механизмами, требующими постоянства скорости вращения или ее широкой регулировки.
Регулирование частоты вращения
Регулирование скорости – это целенаправленное изменение скорости электродвигателя в принудительном порядке при помощи специальных устройств или приспособлений. Оно позволяет обеспечить оптимальный режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Существует три основных способа регулирования скорости двигателя:
- Изменение магнитного потока главных полюсов. Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.
- Изменение сопротивления цепи якоря. К якорю последовательно подключается регулировочный реостат. Скорость вращения якоря уменьшается при увеличении сопротивления реостата, а наклон механических характеристик увеличивается. Регулировка скорости вышеуказанным способом:

- способствует уменьшению частоты вращения относительно естественной характеристики;
- связана с большой величиной потерь в регулировочном реостате, следовательно, неэкономична.
- Безреостатное изменение подаваемого на якорь напряжения. В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения как раз и реализует третий принцип регулирования скорости. Его отличие в том, что обмотка возбуждения и магнитное поле главных полюсов подключаются к разным источникам. Ток возбуждения является неизменной характеристикой, а магнитное поле меняется. При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики остается прежней.
При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики остается прежней.
Таким образом, принцип работы дпт с независимым возбуждением является достаточно сложным вследствие независимой работы двух источников, тем не менее, его главное преимущество – большая экономичность.
5 Механические характеристики и способы регулирования скорости двигателей постоянного тока
2.4. Механические характеристики и способы регулирования скорости двигателей постоянного тока последовательного и смешанного возбуждения
2.4.1. Электромеханические и механические характеристики ДПТ последовательного возбуждения (ПВ)
Схема подключения ДПТ ПВ приведена на рис. 2.55. В отличие от ДПТ независимого возбуждения здесь обмотка возбуждения ОВМ включена последовательно с якорем и через ОВМ протекает ток якоря Iя.
Исходные выражения для электромеханической, механической характеристик и момента ДПТ ПВ можно записать в том же виде, что и для ДПТ независимого возбуждения (см. уравнение (2.14)-(2.16)),
уравнение (2.14)-(2.16)),
wд = ; wд = ; (2.47)
М = сФIя.
В отличие от ДПТ НВ в этих выражениях сопротивление Rя включает в себя и сопротивление обмотки возбуждения. Второе, наиболее важное отличие заключается в том, что магнитный поток Φ является функцией тока якоря. Зависимость магнитного потока Φ от тока не является аналитической кривой (см. рис. 2.56), что не позволяет получить аналитические выражения для электромеханической и механической характеристик ДПТ ПВ. Приведенные уравнения позволяет провести лишь качественный анализ.
Естественная электромеханическая и механическая характеристики двигателя показаны на рис. 2.56, рис. 2.57, кривые 1. Очевидно, что при Iя=0 магнитный поток также равен нулю, и угловая скорость за счет первого слагаемого в выражениях (2.47) стремится к бесконечности (как говорят двигатель идет «вразнос»), т. е. режим холостого хода для ДПТ ПВ является недопустимым.
е. режим холостого хода для ДПТ ПВ является недопустимым.
При возрастании тока якоря магнитный поток Ф вначале растет примерно пропорционально току якоря, а скорость резко снижается (крутопадающий участок на характеристиках).
При больших токах двигатель работает в зоне близкой к насыщению. Поэтому его магнитный поток здесь мало меняется при изменении тока и характеристика становится более жесткой, приближаясь по виду к характеристике ДПТ НВ.
На практике для расчетов используют, так называемые, универсальные характеристики ДПТ ПВ, которые приводятся в каталогах.
2.4.2. Способы регулирование угловой скорости ДПТ ПВ
Для ДПТ ПВ, как и для ДПТ НВ, возможны три основных способа регулирования скорости: 1) введением добавочных сопротивлений в цепь якоря; 2) изменением подводимого напряжения; 3) изменением потока возбуждения.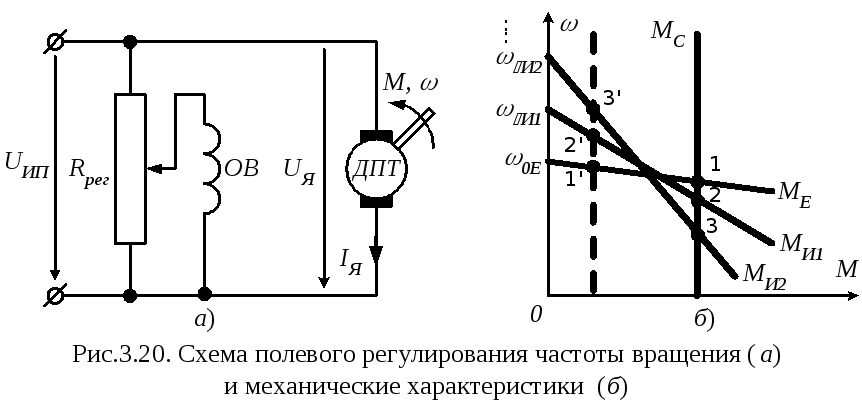
Регулирование угловой скорости введением добавочных сопротивлений является простейшим способом регулирования и широко используется в подъемных и транспортных механизмах. Как следует из уравнений (2.47), при увеличении добавочного сопротивления Rд второе слагаемое в этих выражениях увеличивается, т.е. увеличивается падение скорости от нагрузки. Соответственно, электромеханическая и механическая характеристики в области больших токов становятся более крутопадающими (кривые 2 на рис. 2.56, рис. 2.57 — характеристики с Rд). Введение добавочных сопротивлений в цепь якоря ДПТ ПВ позволяет, как и для ДПТ НВ, регулировать скорость в относительно небольшом диапазоне и ограничить ток якоря при пуске. Обычно величину добавочных сопротивлений изменяют ступенями с помощью релейно-контакторной аппаратуры, как изложено в п. 2.2.2.
Основные недостатки такого регулирования – значительные потери энергии в добавочном сопротивлении, небольшой диапазон регулирования, ступенчатость регулирования.
Регулирование угловой скорости изменением подводимого напряжения может быть осуществлено так же, как для ДПТ НВ, с помощью отдельного генератора или тиристорного преобразователя. Регулирование ведется уменьшением подводимого напряжения и приводит, как следует из уравнений (2.47), к снижению скорости. В транспортных механизмах часто два тяговых двигателя одинаковой мощности работают как многодвигательный электропривод (например, двухосный тяговый электропривод). При этом появляется дополнительная возможность ступенчатого изменения подводимого к двигателю напряжения за счет переключения двигателей с последовательного на параллельное включение. При последовательном включении на каждый двигатель приходится половина напряжения сети. Когда двигатели подключаются параллельно, каждый из них оказывается включенным на полное напряжение сети. Такое регулирование позволяет исключить нерациональную трату энергии.
Регулирование угловой скорости ослаблением потока возбуждения позволяет, как и для ДПТ НВ, получить скорости выше основной. Действительно, как следует из уравнений (2.47), уменьшение потока Φ приводит при том же токе якоря к возрастанию первого слагаемого. Ослабление потока возбуждения обычно осуществляют за счет шунтирования обмотки возбуждения добавочным сопротивлением.
Действительно, как следует из уравнений (2.47), уменьшение потока Φ приводит при том же токе якоря к возрастанию первого слагаемого. Ослабление потока возбуждения обычно осуществляют за счет шунтирования обмотки возбуждения добавочным сопротивлением.
Из анализа механических характеристик ДПТ ПВ следует, что они являются весьма удобными для электрической тяги (трамвай, метро, троллейбус, электровозы, тепловозы) и подъемных механизмов по следующим соображениям:
1) двигатель имеет низкую скорость при больших нагрузках и высокую — при малых, тем самым обеспечивается естественное регулирование скорости движения при изменении сопротивления перемещению;
2) транспортные и грузоподъемные механизмы требуют больших начальных моментов при пуске, именно такие моменты обеспечивает ДПТ ПВ; у ДПТ НВ момент пропорционален току: М~I, а у двигателей последовательного возбуждения М~I2. А так как при пуске двигателя I = (1,5-2,0)Iн, то двигатели последовательного возбуждения развивают значительно больший пусковой момент по сравнению с ДПТ НВ;
3) момент ДПТ ПВ не зависит от напряжения питающей сети, что особенно важно для электрической тяги, где в контактной сети могут возникать большие отклонения напряжения.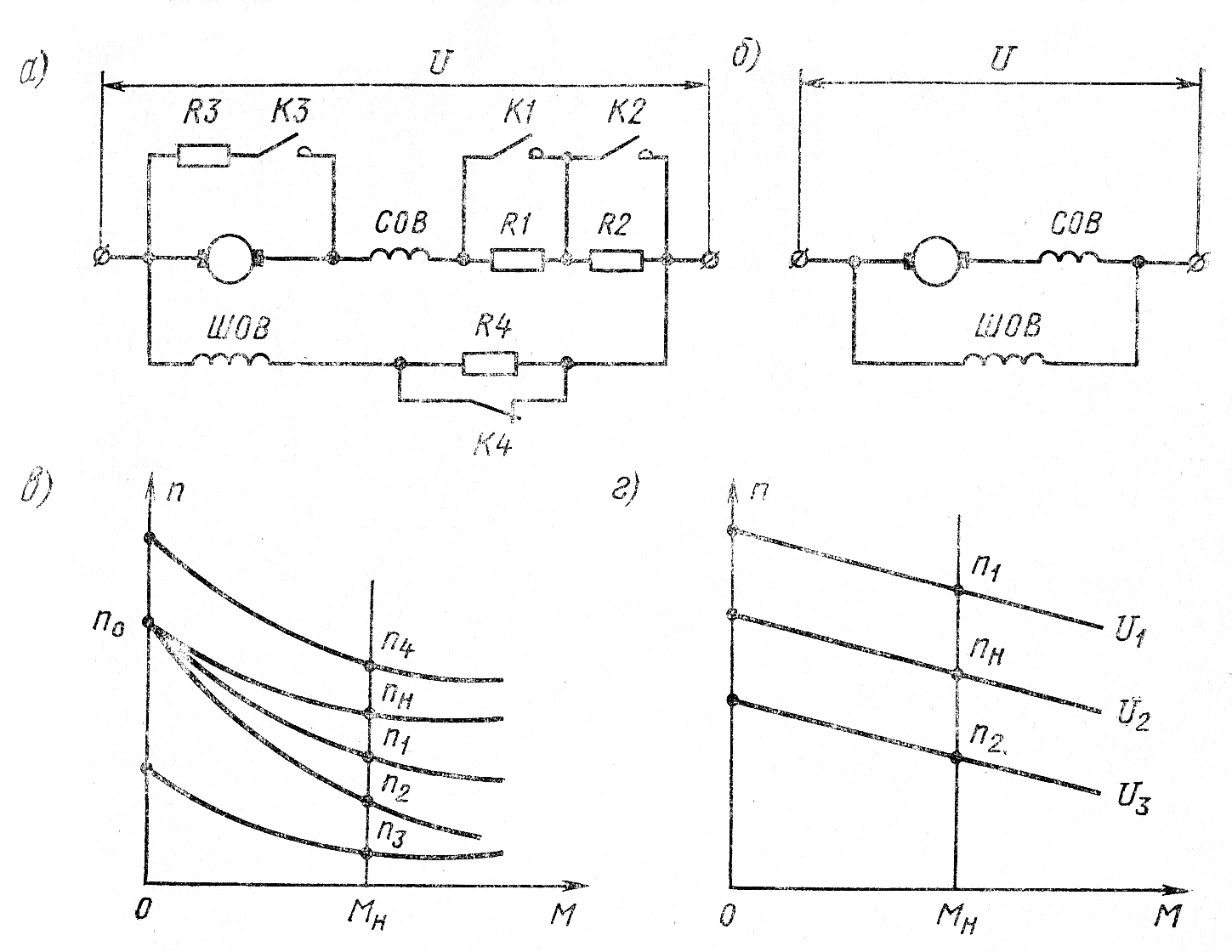
Основным недостатком ДПТ ПВ является неограниченной возрастание скорости при малых токах якоря и, как следствие, невозможность обеспечить режим генераторного торможения.
2.4.3. Тормозные режимы ДПТ ПВ
Для ДПТ ПВ возможны два тормозных режима: торможение противовключением и динамическое торможение.
При торможении противовключением в цепь якоря вводится добавочное сопротивление для ограничения тока якоря. Механические характеристики при этом являются продолжением характеристик двигательного режима в области отрицательной угловой скорости (см. рис. 2.56, рис. 2.57). Такой режим торможения, как и для ДПТ НВ, может возникать, когда момент на валу двигателя превышает значение М1 (рис. 2.57).
Динамическое торможение ДПТ ПВ может осуществляться двумя способами: с самовозбуждением и с независимым возбуждением.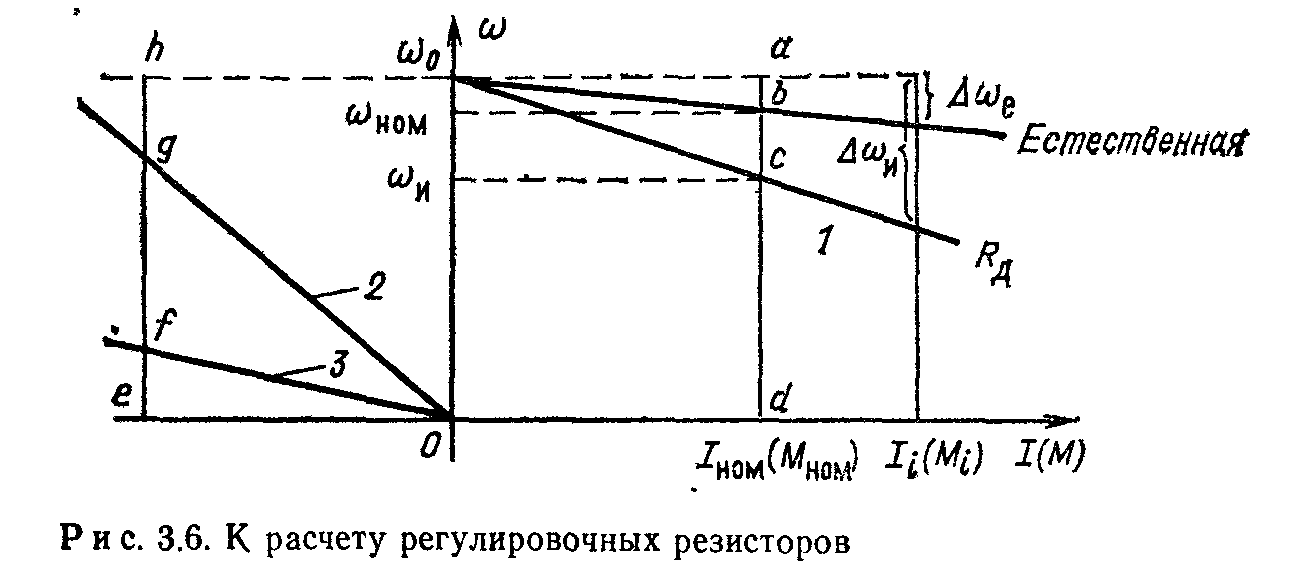 По первому способу якорь и обмотка возбуждения отключаются от сети и замыкаются на добавочное сопротивление (рис. 2.58). При этом обмотку возбуждения или якорь переключают так, чтобы направление тока в обмотке возбуждения не изменилось. Если этого не сделать, то произойдет размагничивание машины.
По первому способу якорь и обмотка возбуждения отключаются от сети и замыкаются на добавочное сопротивление (рис. 2.58). При этом обмотку возбуждения или якорь переключают так, чтобы направление тока в обмотке возбуждения не изменилось. Если этого не сделать, то произойдет размагничивание машины.
При использовании второго способа — динамического торможения с независимым возбуждением, обмотку якоря замыкают на добавочное сопротивление, а на обмотку возбуждения подают напряжение от источника. Схема включения при этом аналогична схеме динамического торможения ДПТ НВ (рис. 2.22), аналогичны и получаемые тормозные характеристики.
Оба рассмотренных тормозных режима ДПТ ПВ мало экономичны, т.к. энергия теряется на добавочных сопротивлениях.
В транспортных средствах очень важно обеспечить отдачу (рекуперацию) электроэнергии в сеть, например, при движении на спуске. Однако, как уже отмечалось, генераторное торможение ДПТ ПВ невозможно. Чтобы решить эту проблему, в электротяге используют переключение обмотки возбуждения ДПТ с последовательного на независимое. Для этого отключают обмотку возбуждения от якоря, и подают на нее через добавочное сопротивление напряжение сети. В результате машина работает с независимым возбуждением. Генераторное торможение такой машины рассмотрено в п. п. 2.2.5, 2.3.5.
Чтобы решить эту проблему, в электротяге используют переключение обмотки возбуждения ДПТ с последовательного на независимое. Для этого отключают обмотку возбуждения от якоря, и подают на нее через добавочное сопротивление напряжение сети. В результате машина работает с независимым возбуждением. Генераторное торможение такой машины рассмотрено в п. п. 2.2.5, 2.3.5.
2.4.4 Механические характеристики и регулирование скорости ДПТ
смешанного возбуждения (СВ)
Схема подключения ДПТ СВ приведена на рис. 2.59. Машина имеет две обмотки возбуждения: последовательную ОВМ1 и независимую ОВМ2.
Уравнения для электромеханической и механической характеристик двигателя аналогичны соответствующим уравнения для ДТП ПВ:
wд = ; wд = ; (2.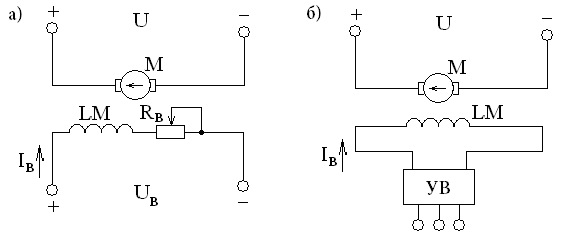 48)
48)
Причем здесь магнитный поток определяется как сумма магнитных потоков Φ1– обмотки ОВМ1 и Φ2 – ОВМ2
Φ = Φ1 + Φ2.
Для ДТП СВ, в отличие от ДПТ ПВ, скорость идеального холостого хода имеет конечное значение и определяется потоком Φ2:
w0 = .
Механическая характеристика двигателя смешанного возбуждения (кривая 3 на рис. 2.60) занимает промежуточное положение между характеристикой ДПТ НВ – кривая 1 и характеристикой ДПТ ПВ – кривая 2. Скорость ДПТ СВ при малых нагрузках изменяется значительно. А при больших нагрузках характеристика достаточно жесткая и близка к линейной, как у ДПТ НВ (см. соответствующие пояснения в п..2.4.1).
Для ДПТ СВ возможны те же тормозные режимы, что и для ДПТ НВ: 1) генераторное; 2) динамическое; 3) противовключением.
Генераторное торможение соответствует участку характеристики при скорости большей w0.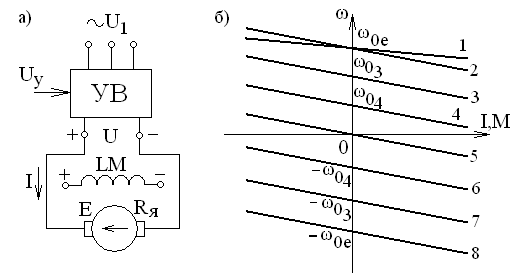 При переходе в режим генераторного торможения ток в якоре и в обмотке последовательного возбуждения меняет свой знак, что может размагнитить машину. Поэтому при возрастании скорости до w0 ОВМ1 обычно шунтируют, и машина работает как ДПТ НВ.
При переходе в режим генераторного торможения ток в якоре и в обмотке последовательного возбуждения меняет свой знак, что может размагнитить машину. Поэтому при возрастании скорости до w0 ОВМ1 обычно шунтируют, и машина работает как ДПТ НВ.
Для динамического торможения якорь двигателя замыкают на добавочное сопротивление, а ОВМ1 отключают, чтобы избежать размагничивания. В результате машина работает как ДПТ НВ, и имеет такие же тормозные характеристики.
При торможении противовключением в цепь якоря вводят добавочное сопротивление, ограничивающее ток якоря. Характеристика при этом становится более мягкой (кривая 4 на рис. 2.60). Машина переходит в режим противовключения при отрицательных значениях скорости.
Регулирование скорости ДПТ СВ так же, как ДПТ ПВ, может осуществляться: 1) изменением подводимого напряжения; 2) введением добавочного сопротивления в цепь якоря; 3) изменением потока последовательной обмотки возбуждения. Кроме того, для ДПТ СВ появляется дополнительная возможность регулирования скорости изменением потока независимой обмотки возбуждения.
Кроме того, для ДПТ СВ появляется дополнительная возможность регулирования скорости изменением потока независимой обмотки возбуждения.
Из рассмотренного следует, что ДПТ СВ имеют характеристики весьма удобные для тягового электропривода. По сравнению с ДПТ ПВ машины со смешанным возбуждением позволяют обеспечить генераторное торможение и регулирование скорости потоком обмотки независимого возбуждения.
Регулирование скорости двигателей постоянного тока
Потенциометрический способ регулирования скорости двигателя постоянного тока изменением сопротивлений, включённых последовательно и параллельно
[c.146]
Регулирование скорости двигателя постоянного тока при помоши управляемых ионных выпрямителей (тиратронов) [c.148]
С высоким пусковым моментом, большим числом включении в час и регулированием скорости Двигатели постоянного тока последовательного или смешанного возбуждения, иногда с искусственными схемами соединения обмоток Механизмы подъема и передвижения кранов большой производительности и точности, вспомогательные металлургические механизмы, электрическая тяга
[c. 239]
239]
Сложные системы регулирования скорости двигателей постоянного тока. С и-стема генерато р-д вигатель (Г—Д). Система генератор-двигатель (система Леонарда) — наиболее совершенная система управления и регулирования двигателей постоянного тока. Недостаток ее [c.517]
Включение сопротивлений в цепь ротора двигателя с контактными кольцами. Диапазон регулирования и недостатки те же, что при регулировании скорости двигателей постоянного тока включением сопротивлений в цепь якоря. [c.136]
РЕГУЛИРОВАНИЕ СКОРОСТИ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА [c.30]
С очень плавным регулированием скорости до отношения 1 4 (вверх от основной скорости) Двигатели постоянного тока параллельного возбуждения с питанием от сети постоянного тока неизменного напряжения Электроприводы главного движения металлорежущих станков (токарных, расточных, карусельных) [c.126]
Электрический привод бесступенчатого регулирования широко применяется в тяжелых и шлифовальных станках. Для увеличения диапазона регулирования комбинируют двигатель постоянного тока с несложной коробкой скоростей.
[c.25]
Для увеличения диапазона регулирования комбинируют двигатель постоянного тока с несложной коробкой скоростей.
[c.25]
Применение электронной схемы регулирования частоты вращения двигателя постоянного тока на тиристорах в данной установке дает возможность плавно изменять скорость перемещения подвижного захвата на 7 порядков от 1,67 до 3,3 10- мм/с. Обеспечивается плавная регулировка скорости перемещения подвижного захвата в широких пределах при сохранении номинального крутящего момента на валу двигателя, т. е. растягивающего усилия, передаваемого на [c.84]
В случае необходимости с помощью данного механизма можно осуществить регулирование скорости опускания груза. При пологой характеристике число оборотов двигателя, работающего на спуск груза, близко к числу его оборотов на холостом ходу. Это позволяет производить изменение скорости опускания путем изменения числа оборотов холостого хода переключением числа полюсов трехфазных электродвигателей или изменением магнитного поля двигателей постоянного тока. Весьма точное регулирование скорости спуска можно произвести даже при трехфазном двигателе введением в систему рычагов дополнительной пружины 1, имеющей предварительное натяжение (фиг. 213, а). При наличии такой пружины корпус вспомогательного двигателя при повороте под действием реактивного момента прежде, чем он разомкнет тормоз, должен преодолеть усилие пружины 1. В зависимости от включенной в данный момент ступени сопротивления двигатель работает на одной из искусственных характеристик а—[c.326]
Весьма точное регулирование скорости спуска можно произвести даже при трехфазном двигателе введением в систему рычагов дополнительной пружины 1, имеющей предварительное натяжение (фиг. 213, а). При наличии такой пружины корпус вспомогательного двигателя при повороте под действием реактивного момента прежде, чем он разомкнет тормоз, должен преодолеть усилие пружины 1. В зависимости от включенной в данный момент ступени сопротивления двигатель работает на одной из искусственных характеристик а—[c.326]
Выше рассмотрен простейший случай системы автоматического регулирования скорости с двигателем постоянного тока независимого возбуждения. В качестве примера для определения
[c.15]
Анализ показывает, что динамическая характеристика двигателя постоянного тока в замкнутой системе автоматического регулирования скорости с линейными и кусочно-линейными звеньями может быть представлена в виде (2.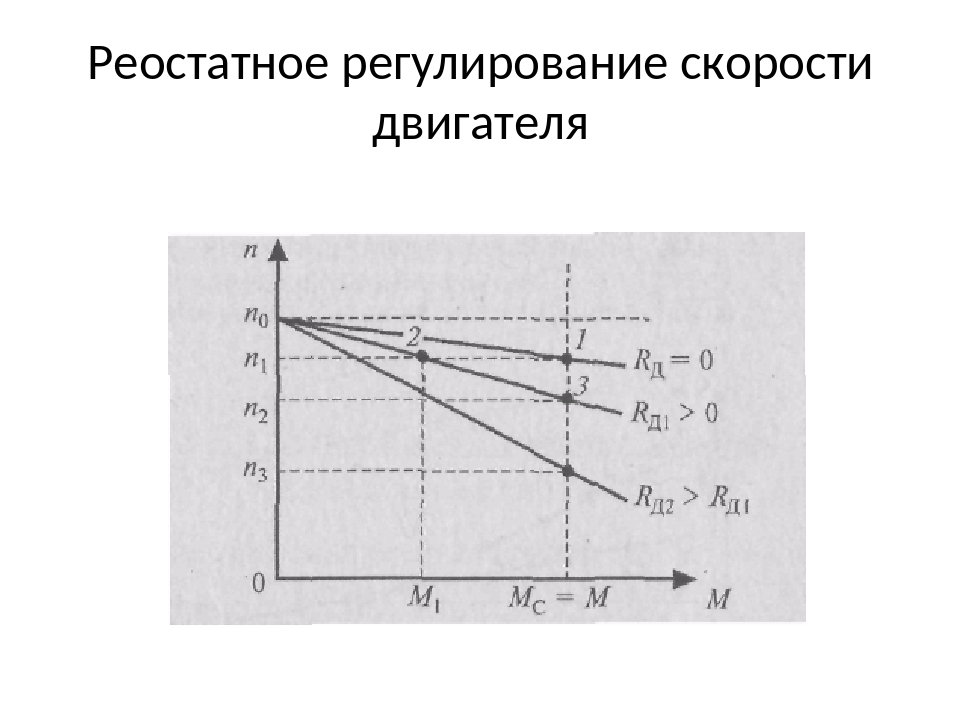 24). Исиользуя выражение для относительной скорости 5 = 1 —оз/мо, уравнение динамической характеристики (2.24) можно преобразовать следующим образом
[c.24]
24). Исиользуя выражение для относительной скорости 5 = 1 —оз/мо, уравнение динамической характеристики (2.24) можно преобразовать следующим образом
[c.24]
На рис. 0. 1, (Э показаны характеристики двигателя постоянного тока с независимым возбуждением. Скорость регулируют путем изменения возбуждения генератора, питающего цепь якоря двигателя. Эта система, названная системой Г—Д (генератор— двигатель), допускает очень тонкое регулирование скорости и находит наибольшее применение там, где, с одной стороны, устанавливают двигатели очень большой мощности, а с другой — предъявляют особые требования в отношении плавного изменения скорости вращения. Мощность двигателей системы Г—Д на крупных шахтных подъемных установках достигает 4 000 кет. В то же время на современных металлорежущих станках, где устанавливают двигатели сравнительно малой мощности, в ряде случаев также применяют систему Г—Д. [c.18]
Этими свойствами обладают двигатели постоянного тока, имеющие широкий диапазон регулирования угловой скорости и высокий КПД. [c.425]
[c.425]
Регулирование скорости тяговых двигателей постоянного тока [c.447]
Для регулирования скорости пригодны те же методы, что и для двигателей постоянного тока (см. стр. 447). Однако наличие трансформатора, понижающего напряжение контактной сети, позволяет в широких пределах и экономично регулировать напряжение на зажимах двигателей путём переключения их на различные выводы вторичной обмотки трансформатора. В связи с этим перегруппировки двигателей и ослабление поля для регулирования скорости не применяются. [c.454]
Ионный электропривод постоянного тока и его механические характеристики. Электропривод этого типа состоит из ионных выпрямляющих аппаратов и двигателя постоянного тока. Для выпрямления переменного тока при больших мощностях двигателей используются ртутные выпрямители с регулируемой сеткой, при меньших мощностях — тиратроны (стеклянные или металлические) и игнитроны. Подводимое к двигателю напряжение ионных аппаратов можно регулировать в широких пределах, изменяя момент зажигания игнитронов посредством подачи соответствующих потенциалов на сетки ртутных выпрямителей или тиратронов.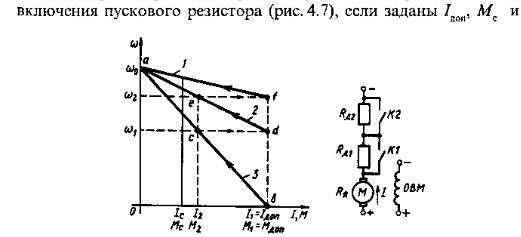 Этим создаётся возможность производить пуск и широко регулировать скорость так же, как и в системе Леонарда. Пределы регулирования скорости двигателя — от 1 20 и выше.
[c.13]
Этим создаётся возможность производить пуск и широко регулировать скорость так же, как и в системе Леонарда. Пределы регулирования скорости двигателя — от 1 20 и выше.
[c.13]
Регулирующие р еос тэты служат для длительного регулирования скорости двигателя изменением сопротивления в цепи якоря двигателей постоянного тока и в цепи ротора асинхронных двигателей. [c.49]
Шунтовые регулировочные реостаты используются для длительного регулирования скорости шунтового двигателя постоянного тока изменением тока возбуждения. [c.49]
Виды управления автоматизированным приводом. Исходные импульсы в схеме автоматизированного привода в основном создаются или кнопками (кнопочное управление), или рычагами — командоконтроллерами (рычажное управление). Иногда исходный импульс для пуска или остановки двигателя создаётся замыканием контактов того или другого реле — поплавкового, реле давления и т. п. Пуск, остановка и торможение при кнопочном и рычажном управлении всегда происходят автоматически. Однако и в автоматизированной схеме иногда ряд процессов может производиться вручную, например, часто регулирование скорости в схеме автоматизированного шунтового двигателя постоянного тока выполняется ручным перемещением ручки реостата. Полное разграничение автоматических и полуавтоматических схем сделать нельзя.
[c.62]
Однако и в автоматизированной схеме иногда ряд процессов может производиться вручную, например, часто регулирование скорости в схеме автоматизированного шунтового двигателя постоянного тока выполняется ручным перемещением ручки реостата. Полное разграничение автоматических и полуавтоматических схем сделать нельзя.
[c.62]
Плавное регулирование скоростей осуществляется либо механическим путём при помощи вариатора, либо электрическим путём за счёт изменения числа оборотов двигателя постоянного тока. [c.234]
Для механизмов с длительной работой, не требующих регулирования скорости, применяются асинхронные, чаще всего коротко-замкнутые двигатели 380 в напряжения, при необходимости же в регулировании скорости применяют шунтовые двигатели постоянного тока. Двигатели для вспомогательных механизмов выбираются закрытыми. Двигатели постоянного тока вспомогательных механизмов получают постоянный ток от двигателя генератора или от ртутных выпрямителей. [c.1059]
[c.1059]
Привод летучих ножниц, режущих полосы на куски при одновременной прокатке их, осуществляется шунтовым двигателем постоянного тока с регулированием скорости в цепи обмотки возбуждения в пределах 1 3-ь-1 4. При необходимости в более широкой регулировке скорости применяется система Леонарда. Поддерживание скорости ножей в соответствии со скоростью полосы в клети стана достигается применением регуляторов скорости, изменяющих скорость ножниц соответственно скорости металла приводом ножниц от стана через механическую связь приводом ножниц от двигателя, получающего питание от генератора, который вращается двигателем клети стана (генератор и двигатель могут быть выбраны как постоянного тока, так и синхронные) синхронизацией скоростей ножниц [c.1067]
Для привода станов холодной прокатки применяют двигатели постоянного тока и асинхронные двигатели. Для станов небольшой производительности с узким сортаментом прокатываемых полос, не требующих точной установки натяжения полосы, могут быть применены асинхронные двигатели. Для станов большой производительности применяют шун-товые двигатели постоянного тока, достоинствами которых являются возможность прокатки широкого сортамента поддерживание определённого натяжения полосы электрическим путём возможность получения небольшой скорости полосы при заправке и т. д. Шунтовой двигатель с регулированием скорости путём изменения потока возбуждения соответствует условиям работы станов холодной прокатки, у которых более узкие полосы, требующие небольшого момента, обычно прокатываются с большой скоростью.
[c.1068]
Для станов большой производительности применяют шун-товые двигатели постоянного тока, достоинствами которых являются возможность прокатки широкого сортамента поддерживание определённого натяжения полосы электрическим путём возможность получения небольшой скорости полосы при заправке и т. д. Шунтовой двигатель с регулированием скорости путём изменения потока возбуждения соответствует условиям работы станов холодной прокатки, у которых более узкие полосы, требующие небольшого момента, обычно прокатываются с большой скоростью.
[c.1068]
Регулирование скорости шунтового двигателя постоянного тока может производиться изменением а) потока возбуждения, б) подводимого напряжения, в) сопротивления якорной цепи. [c.143]
Шунтовые двигатели постоянного тока значительно сложнее, дороже и тяжелее асинхронных (короткозамкнутых) их целесообразно применять лишь в тех случаях, когда требуется широкое и плавное регулирование скорости.
[c. 143]
143]
Шунтовое регулирование двигателей постоянного тока изменением тока и потока возбуждения. Регулирование производится вверх от основной скорости при постоянной номинальной мощности [c.146]
Электрические двигатели постоянного тока по мере их распространения в различных отраслях промышленности приобрели репутацию универсального и безотказного источника механической энергии. Электропривод обеспечивал простоту и быстроту пуска, возможность регулирования скорости вращения, компактность и легкость, приспособляемость к любым производственным процессам при меньших эксплуатационных затратах на единицу продукции по сравнению с паровым приводом. Однако ограниченные возможности передачи электроэнергии на расстояние постоянным током не могли обеспечить широкой электрификации. [c.62]
Другая техническая проблема при электрификации силовых процессов заключалась в рациональном выборе системы токов постоянного или переменного трехфазного. Двигатели постоянного тока удерживали первенство там, где требовалось удобное и экономичное регулирование скорости вращения в широких пределах, а также при частом реверсировании.
[c.71]
Двигатели постоянного тока удерживали первенство там, где требовалось удобное и экономичное регулирование скорости вращения в широких пределах, а также при частом реверсировании.
[c.71]
Таким образом, изложенное выше представляет собой описание практической реализации транзисторного преобразователя с микропроцессорным управлением, предназначенного для регулирования скорости двигателя постоянного тока с независимым возбуждением. На основе измеренных параметров системы преобразователь — двигатель (ток ротора, ток возбуждения, противоЭДС, входное напряжение преобразователя) с помощью 16-битового микропроцессора формируется такой алгоритм управления, который позволяет добиться таких же тяговых характеристик, как в двигателях с последовательным возбуждением. [c.33]
Электроприводы постоянного тока системы УВ—Д. Электроприводы с тиристорными преобразователями (ТП) постоянного тока применяются для мощных крановых механизмов. При числе включений не более 300 в час используются нереверсивные ТП серии АТК [9] с контактными реверсорами в главной цепи двигателя (рис.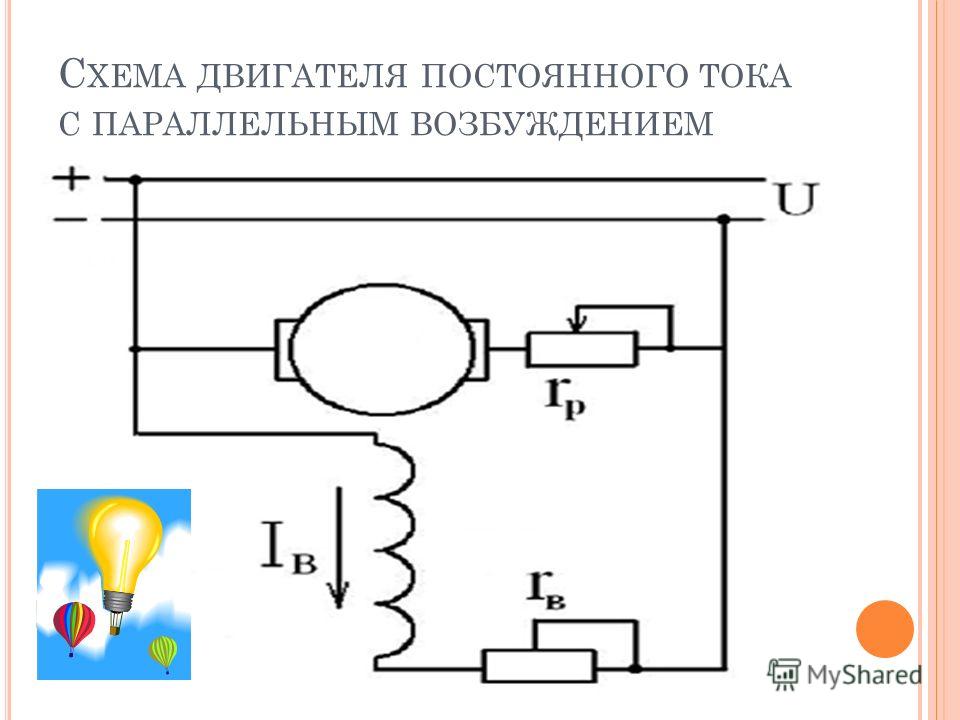 П.1.29). Реверсивные ТП серии АТРК (табл. П.1.28) применяются для регулирования угловой скорости двигателей постоянного тока независимого возбуждения питаются от сети переменного тока 380 В частотой 50 Ft и обеспечивают диапазон регулирования ниже основной скорости 1 8, ёыше до 2 1. Для приводов мощностью свыше 250 кВт выбираются два парая-
[c.276]
П.1.29). Реверсивные ТП серии АТРК (табл. П.1.28) применяются для регулирования угловой скорости двигателей постоянного тока независимого возбуждения питаются от сети переменного тока 380 В частотой 50 Ft и обеспечивают диапазон регулирования ниже основной скорости 1 8, ёыше до 2 1. Для приводов мощностью свыше 250 кВт выбираются два парая-
[c.276]
В данной машине (рис. 17) использована гидравлическая схема передачи усилия от рабочего кулачка 4 через ролик 3 и плунжер 2 на шток исполнительного механизма . Испытания на сжатие проводятся в нпжней части рабочей клети в массивном контейнере, на растяжение — в высокотемпературной печи, смонтированной между колоннами в верхней части рабочей клети. Регулирование скорости деформации проводится за счет изменения скорости вращения двигателя постоянного тока и смены передаточного отношения редуктора. [c.44]
Рассмотренные выше системы с управляемыми двигателями постоянного тока являются разомкнутыми. В таких системах изменение регулируемой величины (скорости вращения двигателя) определяется только внутренними свойствами, вследствие чего точхшсть регулирования оказывается невысокой. В современных автоматизированных приводах с электродвигателями постоянного тока применяются замкнутые системы с устройствами, обеспечивающими коррекцию регулируемых величин при изменении возмущающих воздействий [19, 103, 104].
[c.23]
В таких системах изменение регулируемой величины (скорости вращения двигателя) определяется только внутренними свойствами, вследствие чего точхшсть регулирования оказывается невысокой. В современных автоматизированных приводах с электродвигателями постоянного тока применяются замкнутые системы с устройствами, обеспечивающими коррекцию регулируемых величин при изменении возмущающих воздействий [19, 103, 104].
[c.23]
Рис. 6.61. Двухмоторный привод с электро.магпптной муфтой. При включении привода на рабочую скорость движение передается от двигателя постоянного тока через червячную передачу 5 и далее на вал 6 при включенном правом электромагните 4. Для передачи валу 6 движения с другой скоростью запускается соединенный с валом I двигатель трехфазного тока и подключается левый электромагнит 2, диск 3 притягивается к левой полумуфте, а муфта 4 выключается. Муфта допускает дистанционное управление и электрическое регулирование рабочей скорости.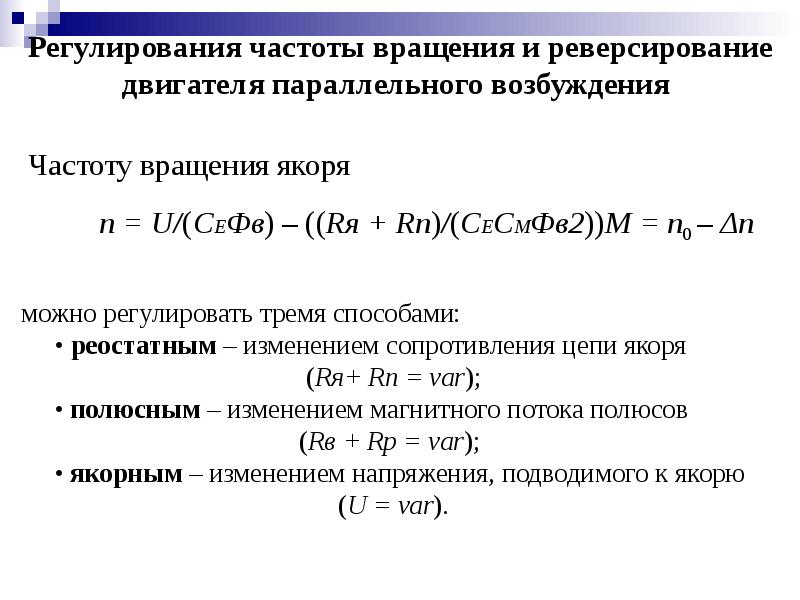
|
Электрическое тор.можение применяется сравнительно редко. Реостатное торможение осуществляется в режиме постоянного тока при самовозбуждении (подобно сериесным двигателям постоянного тока), а также в ре-жи.ме переменного тока при независи.мом возбуждении от трансформатора. В последнем случае для регулирования скорости используются те же ступени трансформатора и та же аппаратура, что и при моторном режиме [4].
[c.455]
Сравнение видов электрического торможения. Рекуперативное торможение можно применять в шунтовых двигателях постоянного тока с регулированием скорости током возбуждения и в короткозамкнутых асинхронных Двигателях с переключением полюсов. Выбор между противовключеняем и динамическим торможением зависит от требуемой быстроты торможения и точности остановки при одинаковых исходных токах в якоре торможение противовключением более эффективно, так как тормозной момент при противо-включении меняется мало, а при динамическом торможении спадает до нуля. Динамическое торможение практически считается наиболее точным. Для реверсивных приводов чаще применяют противовключение, для нереверсивных— динамическое, так как схема последнего проще.
[c.8]
Динамическое торможение практически считается наиболее точным. Для реверсивных приводов чаще применяют противовключение, для нереверсивных— динамическое, так как схема последнего проще.
[c.8]
Выбор рода тока для электроприводов. На районных электрических станциях энергия генерируется в форме переменного тока и на промышленные предприятия подаётся трёхфазный ток. Поэтому во всех случаях, где применение двигателей постоянного тока не вызывается производственной необходимостью, следует устанавливать электродвигатели трёхфазного тока. Потребность в двигателях постоянного тока может возникать I) при широком и плавном регулировании скорости, 2) при большом числе пусков в час и вообще при напряжённом повторно-кратковременном режиме 3) при работе электроприводов по специальному графику скорости, пути 4) при необходимости в особой плавности пуска и торможении, перехода от одного рабочего процесса к другому 5) при необходимости кроме основных, рабочих, получить и заправочные скорости механизмов. Краткое сопоставление различных электрических типов электродвигателей в отношении регулирования скорости дано в табл. 4, из которой видно, что во всех тех случаях, где требуется плавное регулирование скорости в пределах 1 3 и выше, наиболее целесообразно применять двигатели постоянного тока или систему Леонарда, а в малых мощностях электронноионный привод. Последний в эксплоатационном отношении достаточно не изучен. При ступенчатом регулировании до 1 4 преимущественно при малых мощностях (особенно в металлорежущих станках) могут быть использованы короткозамкнутые асинхронные двигатели с переключением полюсов. Коллекторные двигатели переменного тока в указанных пределах экономичны в основном лишь при установке
[c.20]
Краткое сопоставление различных электрических типов электродвигателей в отношении регулирования скорости дано в табл. 4, из которой видно, что во всех тех случаях, где требуется плавное регулирование скорости в пределах 1 3 и выше, наиболее целесообразно применять двигатели постоянного тока или систему Леонарда, а в малых мощностях электронноионный привод. Последний в эксплоатационном отношении достаточно не изучен. При ступенчатом регулировании до 1 4 преимущественно при малых мощностях (особенно в металлорежущих станках) могут быть использованы короткозамкнутые асинхронные двигатели с переключением полюсов. Коллекторные двигатели переменного тока в указанных пределах экономичны в основном лишь при установке
[c.20]
Двигатели постоянного тока, питаемые от постоянного напряжения а) шунтовые б) сериесные в) компаундные До 1 3 я даже до 1 4 с получением заправочных и ползучих скоростей Плавный наименее плавный — в сериес-ных двигателях Практически ограничений нет Наименее экономично регулирование в сериесных двигателях. Получение очень низких скоростей сопряжено с потерями. Подходят для повторнократковременного режима
[c.21]
Получение очень низких скоростей сопряжено с потерями. Подходят для повторнократковременного режима
[c.21]
Основным методом расчета двигателя по нагреву является метод эквивалентного тока. Если при всех условиях работы данного графика мощность или момент пропорциональны току, могут быть использованы также методы эквивалентной мощности или момента. Метод эквивалентного момента не пригоден для асинхронных электродвигателей с короткоза.мкнутым ротором при частых пусках, для двигателей постоянно1 о тока параллельного возбуждения с регулированием скорости путем ослабления магнитного потока, а также для двигателей постоянного тока последовательного возбуждения. [c.428]
Регулирование скорости в электроприводах | Электрооборудование и автоматизация сельскохозяйственных агрегатов
Страница 15 из 59
Глава 9. РЕГУЛИРОВАНИЕ СКОРОСТИ В ЭЛЕКТРОПРИВОДАХ. ВЫБОР РЕЗИСТОРОВ
ОСНОВНЫЕ ПОКАЗАТЕЛИ РЕГУЛИРОВАНИЯ СКОРОСТИ
Регулированием скорости электропривода называют принудительное изменение скорости исполнительного органа энергетического машинного устройства. Изменяется скорость при дополнительном воздействии на электродвигатель со стороны управляющего и преобразовательного устройств или при помощи специальных механических передач. В настоящее время чаще применяют электрическое регулирование. В этом случае упрощается кинематическая схема машинного агрегата, улучшаются технико-экономические показатели. Такой электропривод представляет собой более совершенную форму привода, способствующую автоматизации технологических процессов, повышению производительности машин, улучшению качества выпускаемой продукции.
Изменяется скорость при дополнительном воздействии на электродвигатель со стороны управляющего и преобразовательного устройств или при помощи специальных механических передач. В настоящее время чаще применяют электрическое регулирование. В этом случае упрощается кинематическая схема машинного агрегата, улучшаются технико-экономические показатели. Такой электропривод представляет собой более совершенную форму привода, способствующую автоматизации технологических процессов, повышению производительности машин, улучшению качества выпускаемой продукции.
Основными критериями, которыми руководствуются при выборе способа регулирования скорости, являются диапазон, плавность, экономичность регулирования и стабильность работы на заданной скорости.
Диапазон изменения скорости определяется отношением значений наибольшей и наименьшей скоростей при номинальной нагрузке двигателя.
Плавность регулирования характеризуется числом ступеней внутри диапазона регулирования: чем больше ступеней, тем больше плавность.
Экономичность регулирования оценивается по приведенным затратам, которые зависят в основном от потерь энергии и капитальных вложений.
Стабильность работы определяется жесткостью механических характеристик двигателя.
Регулируемые приводы применяют в кормоприготовительных агрегатах и на раздаче корма, в сенажной башне для равномерного разбрасывания травяной массы и вентиляционных установках животноводческих помещений, в металлорежущих станках и испытательных установках ремонтных предприятий. Область применения их с каждым годом расширяется.
РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
В электроприводах с плавным, в большом диапазоне регулированием скорости обычно применяют двигатели постоянного тока.
Из уравнений (8.5) и (8.7) вытекает, что возможны три способа принудительного изменения скорости:
уменьшением магнитного потока; изменением напряжения на якоре, увеличением сопротивления якорной цепи.
Рис. 9.1. Электромеханические (а) и механические (б) характеристики двигателя с независимым возбуждением:
1 — при уменьшении тока возбуждения; 2 — при снижении напряжения на якоре.
Уменьшить ток возбуждения, а вместе с ним и магнитный поток электродвигателя с независимым возбуждением можно при помощи переменного резистора или регулируемого источника питания.
Так как ток обмотки возбуждения невелик (не более 5% от номинального), аппараты эти просты и недороги, а потери энергии в них малы.
Из рисунка 9.1 (в зоне 1 показаны механические и электромеханические характеристики электродвигателя при разных магнитных потоках, причем Ф2<Ф1<Фн) наглядно видно, что угловая скорость увеличивается с уменьшением магнитного потока. На холостом ходу скорость обратно пропорциональна величине магнитного потока.
Если есть момент сопротивления, скорость снижается, но если Мс не слишком велик, она остается большей, чем при номинальном магнитном потоке.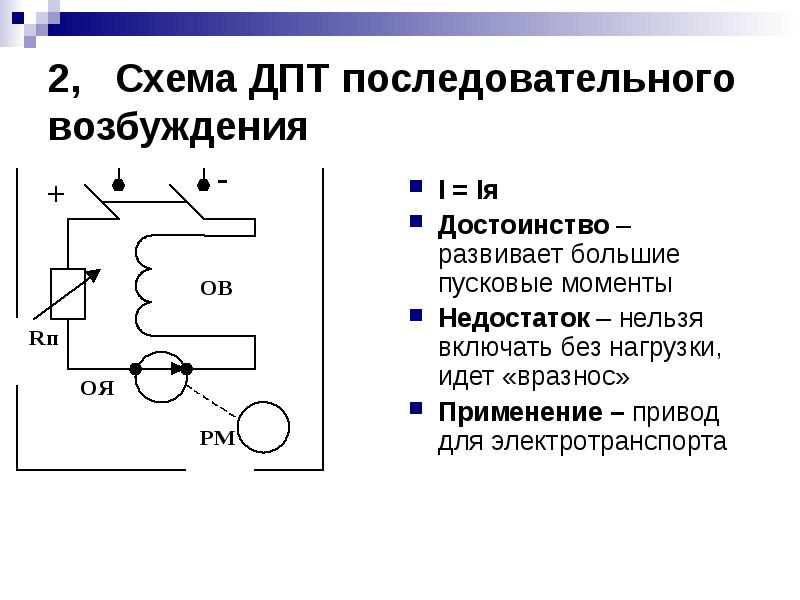
Для серийных электродвигателей допускается двукратное увеличение частоты вращения, для специальных — трехкратное. Большое увеличение скорости сопряжено с опасностью механических повреждений и сильным искрением щеток.
Если момент сопротивления постоянен, то с ослаблением магнитного потока ток в якоре возрастает. Двигатель надо выбирать с учетом этого обстоятельства или уменьшать момент нагрузки по мере увеличения частоты вращения, то есть осуществлять регулирование при постоянной мощности. Механические характеристики по мере ослабления магнитного потока становятся менее жесткими.
Искусственные механические и электромеханические характеристики электродвигателя при изменении напряжения на зажимах якоря, которые приведены в виде графиков на рисунке 9.1 (а, б) (зона II), параллельны естественной, следовательно, жесткость их не меняется. Это позволяет снижать частоту вращения в 5… 6 раз по сравнению с номинальной и иметь достаточно стабильный скоростной режим.
Рис. 9.2. Схема регулируемого электропривода постоянного тока системы регулируемый автотрансформатор — выпрямитель— двигатель:
9.2. Схема регулируемого электропривода постоянного тока системы регулируемый автотрансформатор — выпрямитель— двигатель:
Т — автотрансформатор; М — электродвигатель; VI… VS диоды.
Регулирование скорости можно осуществлять с постоянным моментом сопротивления, не завышая номинальную мощность электродвигателя. Пуск двигателя осуществляется на пониженном напряжении.
В качестве источника питания — регулятора напряжения применяют устройства, которые преобразуют переменный ток в постоянный и регулируют значение выпрямленного напряжения. Обмотка возбуждения подключается к отдельному нерегулируемому преобразователю.
Наиболее простой регулятор-преобразователь (рис. 9.2) состоит из регулируемого автотрансформатора Т и выпрямительного моста. Напряжение плавно регулируется автотрансформатором, затем выпрямляется диодами. Обмотка возбуждения электродвигателя в этом приводе получает питание от выпрямителя, подключенного к той же сети переменного тока.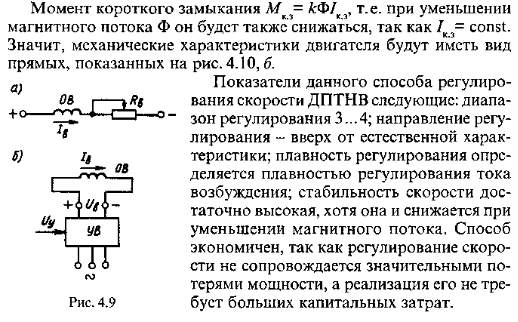
Механические характеристики электродвигателя при такой схеме включения менее жесткие, чем естественная, из-за дополнительных потерь напряжения в автотрансформаторе и диодах. Такая схема применяется в приводах мощностью до 1 … 2 кВт.
Электропривод системы генератор — двигатель имеет электромашинный агрегат, который преобразует переменный трехфазный ток в постоянный регулируемого напряжения при помощи асинхронного двигателя и генератора постоянного тока. Напряжение генератора изменяется за счет тока в обмотке возбуждения. Эта система, называемая сокращенно Г—Д, применима для любых мощностей. Недостатки — большая металлоемкость, наличие вращающихся машин, низкий к. п. д.
В последнее время широко применяют дроссельные и тиристорные преобразователи — регуляторы, устройство которых описывается в главе 13. С этими преобразователями выпускаются комплектные электроприводы.
Например, приводы ПМУ состоят из регулятора напряжения с магнитным усилителем и электродвигателя.
Наиболее перспективны тиристорные электроприводы. Комплектные тиристорные электроприводы серии ЭТО выпускаются на мощность от 0,1 до 1,7 в четырех модификациях. В комплект электропривода ЭТО1 (рис. 9.3) входят: электродвигатель постоянного тока М, тиристорный преобразователь ГП, сглаживающий дроссель L, регулятор скорости RC, промежуточный полупроводниковый усилитель У, система импульсно-фазового управления и блок питания цепей управления.
Тиристорный преобразователь собран на однофазной мостовой неуправляемой схеме с диодами VI …V4 и тиристором V6, система управления тиристором содержит импульсный трансформатор Т2 и фазосдвигающее устройство, состоящее из генератора пилообразного напряжения ГПН и формирователь импульсов ФИ. Привод представляет собой замкнутую систему автоматического управления с обратной отрицательной связью по противо-э.д.с. и положительной по току двигателя, снятой с тахомоста (R2, R3), обеспечивающую регулирование угловой скорости в диапазоне 1 : 20 с перепадом скорости не более 10%.
Стабильность скорости обеспечивается тем, что на вход усилителя У подается напряжение, равное разности двух: тахомоста Uм и регулятора задатчика скорости U3. За счет этого уменьшение э. д. с. и увеличение тока автоматически приводят к тому, что усиленный сигнал на выходе усилителя обеспечивает более раннее открытие тиристора и стабилизацию напряжения.
Пуск электродвигателя форсированный, с ограничением форсировки стабилитроном V7 и углом упреждающего токоограничения V8, R5, поддерживающих пусковой ток в пределах (1,5… 2). Динамические характеристики обеспечиваются также корректирующей цепочкой R1, С1. Тиристор защищен от перенапряжений на сторонах постоянного и переменного тока цепочками RC.
Рис. 9.3. Электрическая принципиальная схема комплектного однофазного тиристорного электропривода постоянного тока.
Изготовляются более мощные комплектные тиристорные электроприводы, например ПТЗ, с питанием от трехфазной цепи мощностью до 8 кВт, в которых стабилизация скорости обеспечивается за счет отрицательной обратной связи по скорости, получаемой при помощи тахогенератора.
Регулирование частоты вращения электродвигателей введением резисторов в цепь якоря (реостатное регулирование) применяют только для двигателей малой мощности. При включении резистора скорость уменьшается.
Диапазон регулирования не постоянен, зависит от нагрузки и не превышает 1 : 3. Искусственные характеристики имеют малую жесткость. Регулирование связано с большими дополнительными потерями энергии, которая в виде тепла выделяется в регулировочном реостате. Резисторы из за этого получаются громоздкими. Особенно велики потери при регулировании с постоянным моментом.
Реостатное регулирование применяют как основной способ в электроприводах с двигателями последовательного возбуждения небольшой мощности и универсальными.
Потери энергии в роторной цепи велики, они пропорциональны моменту и скольжению.
ВЫБОР РЕЗИСТОРОВ ДЛЯ ЭЛЕКТРОДВИГАТЕЛЕЙ
Для пуска и регулирования частоты вращения двигателей, асинхронных с фазным ротором и постоянного тока, необходимы резисторы или регуляторы напряжения.
Ручной пуск осуществляют при помощи стандартных переменных резисторов (пусковых реостатов).
Пусковые реостаты серии РП предназначены для ручного пуска двигателей постоянного тока мощностью до 4 кВт, реостаты РЗП для двигателей от 4 до 42 кВт.
Серия РП имеет один типоразмер, серия РЗП — 5 типоразмеров.
При одинаковом размере пусковые реостаты различаются номинальными токами элементов и числом ступеней. Реостат РЗП-2, например, имеет номинальный ток до 40 А, число ступеней 7. Они предназначены для двигателей мощностью до 7 кВт.
Для пуска двигателей с фазным ротором изготовляют пусковые реостаты с масляным охлаждением типов ПР-17,5 и ПР-29,5. Первый предназначен для двигателей мощностью до 17,5 кВт, второй— для двигателей мощностью до 29,5 кВт. Реостаты допускают от 5 до 3 пусков подряд, длительность одного пуска не должна быть более 10… 18 с.
Технические параметры пусковых реостатов приводятся в справочниках, и выбирать тот или иной тип реостата следует в соответствии с номинальными данными электродвигателя.
При автоматизированном пуске двигателей используют стандартные ящики резисторов, выпускаемых нашими заводами. Их применяют в качестве пусковых, пускорегулировочных, тормозных и регулировочных сопротивлений для двигателей постоянного и переменного тока. Ящики резисторов ЯС-1 состоят из 40 чугунных литых элементов, каждый из которых может иметь сопротивление от 0,28 до 0,038 Ом; длительно допускаемый ток от 20 до 55 А. Выпускаются ящики резисторов с фехралевыми и константановыми элементами, рассчитанные на меньшие токи и большие сопротивления.
Для того чтобы выбрать тот или иной ящик резисторов, надо рассчитать число ступеней и значения их омических сопротивлений. Эти расчеты для двигателей независимого возбуждения и двигателей с фазным ротором одинаковы.
Для расчета пусковых резисторов могут быть заданы два условия.
- Известно число ступеней пускового сопротивления т.
- Неизвестно число ступеней сопротивления.
При автоматизированном управлении приходится особенно считаться с числом ступеней, так как каждая ступень требует установки дополнительных реле и контакторов.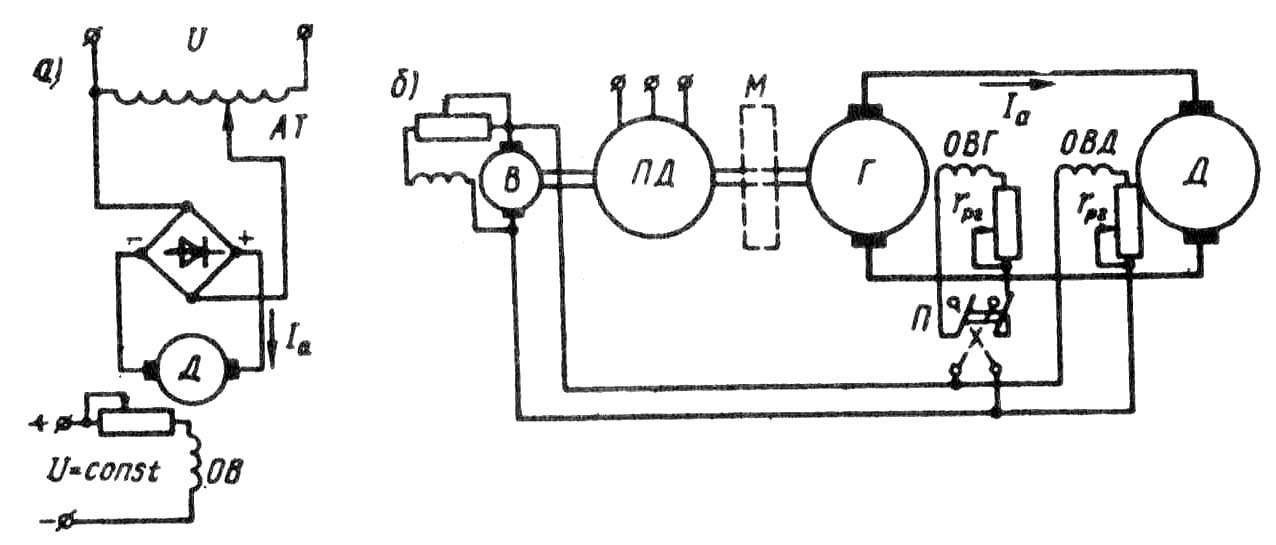 Для приводов средней мощности число ступеней принимают обычно 2…4.
Для приводов средней мощности число ступеней принимают обычно 2…4.
При графическом методе расчета чертят семейство механических характеристик электродвигателя таким образом, чтобы обеспечить рациональный пуск, для этого:
чертят естественную характеристику двигателя 1 (рис. 9.6) в относительных единицах;
задаются значениями максимального момента М1, момента переключения при пуске М2 и проводят вертикальные пунктирные линии;
наносят искусственные характеристики 2 и 3.
Прямая 2 проходит через точки идеального холостого хода О и начального пускового момента А. Прямую 3 проводят из точки О в точку В, находящуюся на линии момента М1 в месте пересечения прямой 2 с вертикальной линией момента М2. Данная пусковая диаграмма соответствует рациональному ступенчатому пуску.
При включении двигателя с двумя резисторами (точка А) он начинает разгоняться. Когда момент снизится до величины М2, резистор R2 шунтируется и двигатель переходит на новую характеристику 3 в точку В. Момент двигателя снова возрастает до значения M1. Последующий разгон и переход на новую характеристику осуществляется аналогично.
Момент двигателя снова возрастает до значения M1. Последующий разгон и переход на новую характеристику осуществляется аналогично.
Направление регулирования и допустимая механическая нагрузка на электродвигатель
5. Направление регулирования скорости.
За исходную точку принимается скорость вращения на естественной характеристике при номинальной нагрузке. В зависимости от способа регулирования скорости, ее можно уменьшать или увеличивать относительно номинальной. Направление регулирования зависит от способа регулирования скорости. У ДПТ скорость регулируется вниз от номинальной при введении активного сопротивления в цепь якоря, и верх от номинальной при изменении магнитного потока. У асинхронных и синхронных двигателей скорость регулируется только вниз от номинальной.
6. Допустимая механическая нагрузка на электродвигатель.
Максимально допустимым моментом на валу двигателя является номинальный момент. Если при регулировании скорости момент на валу двигателя может стать больше номинального, это может привести к разрушению электропривода.
Во многих производственных механизмах изменение момента сопротивления в зависимости от скорости будет различным. Такие производственные механизмы, как механизмы подъема крана, лебедки и т.д. требуют регулирования скорости с постоянством моментов, кроме того есть производственные, у которых регулирование скорости должно производится при постоянной мощности (токарные и другие металлорежущие станки).
Желательно при расчете электропривода выбирать такой способ регулирования, чтобы двигатель был загружен одинаково как на естественной, так и на искусственной регулировочных характеристиках.
Условием полного использования двигателя по моменту является постоянство величины нагрузочного тока. Если этот ток будет равен номинальному, двигатель будет загружен полностью и будет иметь максимальный КПД.
В электроприводах с ДПТ для расширения диапазона регулирования используется двухзонное регулирование. В первой зоне регулирование скорости осуществляется либо изменением напряжения на зажимах якоря, либо изменением сопротивления в цепи якоря.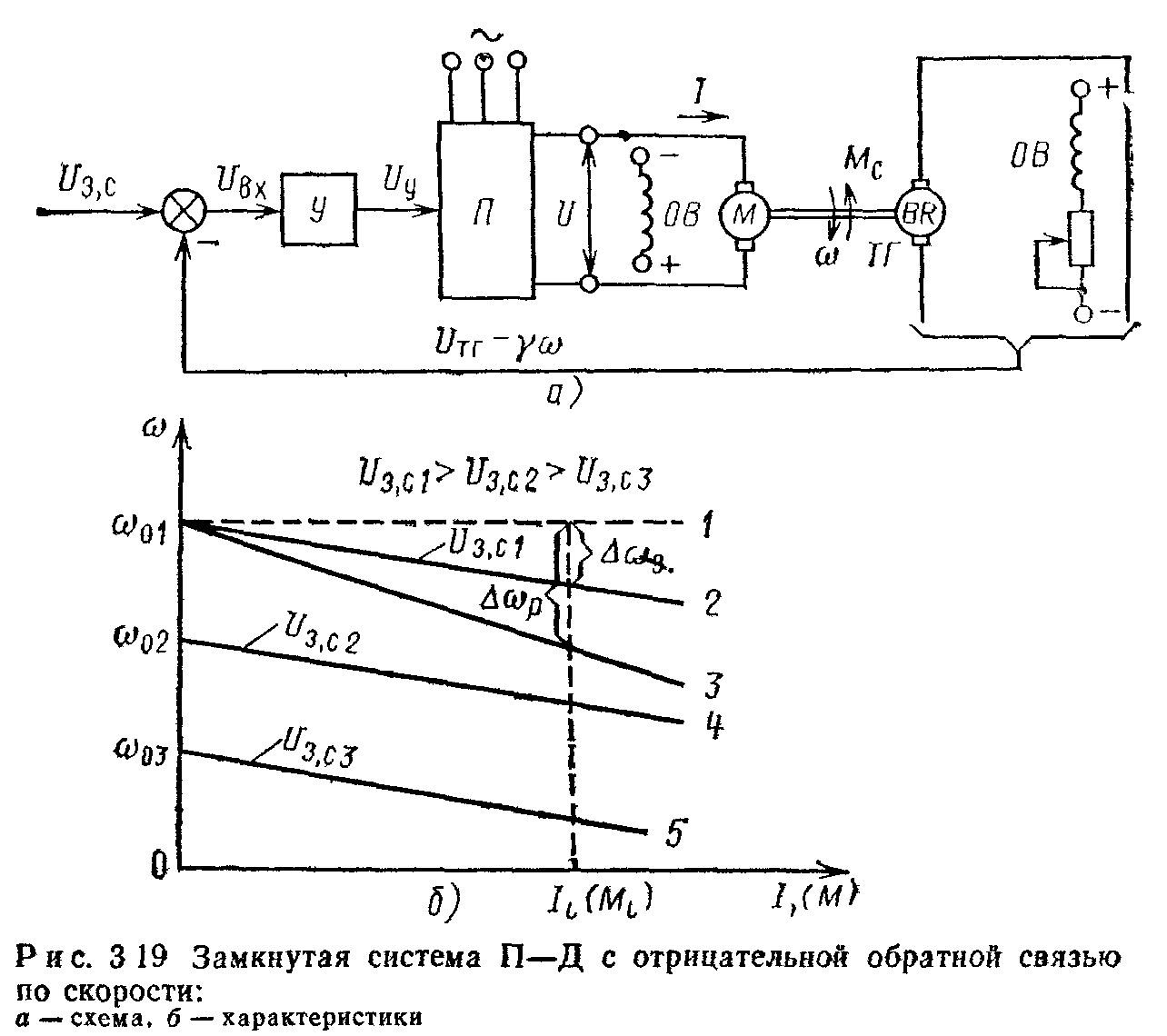 И в том и в другом случае момент не может быть больше номинального. Во второй зоне скорость регулируется вверх от номинальной изменением магнитного потока, в этом случае перегрузки быть не может.
И в том и в другом случае момент не может быть больше номинального. Во второй зоне скорость регулируется вверх от номинальной изменением магнитного потока, в этом случае перегрузки быть не может.
Все части: 1 | 2 | 3 | 4
Закладка Постоянная ссылка.
Регулирование скорости вращения двигателей постоянного тока
Электропривод, построенный на основе двигателей постоянного тока, используется в металлургической, машиностроительной, химической, угольной, деревообрабатывающей и других отраслях промышленности.
Применение электропривода создания промышленного оборудования, в том числе станков с высокой степенью автоматизации. При этом в автоматизированном электроприводе главное место занимает такая задача, как регулирование скорости вращения двигателя постоянного тока.
Основные способы управления скоростью вращения двигателя постоянного тока:
1) изменение тока в цепи обмотки возбуждения при стабильном напряжении на обмотке якоря;
2) изменение напряжения на обмотке якоря при стабильном токе в цепи обмотки возбуждения;
3) изменение напряжения на обмотке якоря, а также изменение тока в цепи обмотки возбуждения.
Для изменения величин напряжения на обмотке якоря или силы тока в цепи обмотки возбуждения применяются чаще всего управляемые выпрямители.Для работы в промышленном оборудовании используются однофазные и трехфазные выпрямители, собранные по мостовой схеме. При этом исполнение двигателя постоянного тока способствует тому, что необходимая мощность выпрямителей для цепи обмотки возбуждения намного меньше мощности выпрямителя для обмотки якоря. Однако, существуют также недостатки регулирования частоты вращения двигателя изменением силы тока в цепи обмотки возбуждения. Основным недостатком является уменьшение быстродействия исполнения задаваемой скорости, другими словами, худшие динамические свойства автоматизированого электропривода.Для некоторых применений эти показатели являются не критичными, поэтому при проектировании следует руководствоваться требованиями к приводу в соответствии с техническим заданием. Восстановление электродвигателей драйверов двигателя постоянного тока отличается от ремонта частотных преобразователей, используемых в системах управления асинхронными двигателями переменным током, так как используется различный управление и соответствующая разная схемотехника.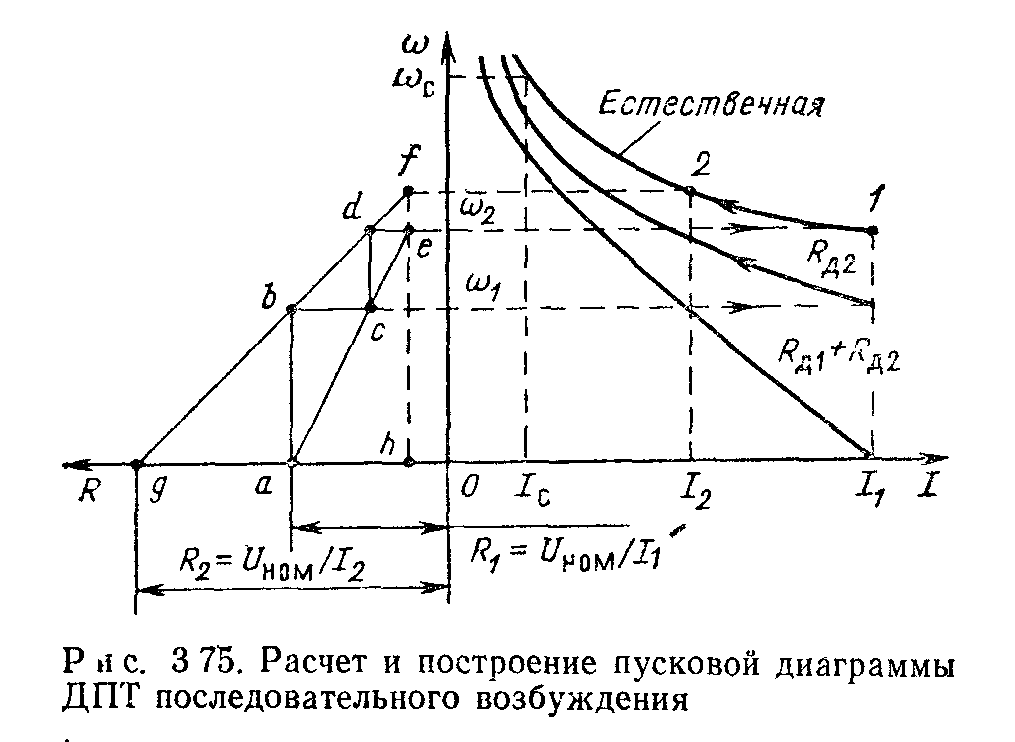
Если технологический процесс включает изменения направления вращения двигателя (реверс), эта возможность также может быть выполнена одним из способов — в цепи обмотки якоря или обмотки возбуждения.Такая возможность реализуется изменением полярности управляющего напряжения или тока.
Примеры работ
Услуги
Контакты
Время выполнения запроса: 0,00242185592651 секунд.
Лекция 35 Регулировка скорости ДПТ. ч2
Регулировка скорости ДПТ. Ч 2.
Регулировка скорости вращения двигателя независимого возбуждения изменением напряжения якоря.В тех случаях, когда двига-
предназначена для работы в условиях использования наиболее подходящим образом его работы с помощью изменения скорости с помощью изменения напряжения на якоре при независимом возбуждении, позволяющем иметь полный поток при всех скоростях.
В том случае, когда напряжение на зажимах двигателя можно регулировать от нулевого значения до плавного, можно иметь не только широкую, экономичную и плавную регулировку скорости двигателя, но и безреостатный пуск его в ход без потерь в пусковом реостате.
Наиболее типичными системами подобного рода являются: А) система Леонарда или система генератор-двигатель (сокращенно ГД) и Б) система Леонарда-Ильгнера или система генератордвигатель с маховиком (сокращенно ГДМ). Одна из принципиальных схем ГД на рис. 5.18.
Здесь ПД — первичный двигатель трехфазного тока, сочле-
Рис.Рис5.18. .Схемасистемысистемы «генератор« генератор– двигатель- »ненный на одном валу с генера-
двигатель »
тором постоянного тока и образующий совместно с последним устройством, предназначенную для преобразования энергии перемен-
силы тока в силу постоянного тока; Д исполнительный двигатель постоянного тока.Обмотки возбуждения ОВГ генератора и двигателя ОВД питаются от независимого источника — сети постоянного тока. (рис. 5.18.)
В общем случае генератор постоянного тока может питать несколько двигателей постоянного тока, если они работают в одинаковых условиях. Вместо асинхронного двигателя часто, в особенности при больших и средних мощностях, применяют синхронные двигатели, вращающиеся со строго постоянной скоростью.
Для возбуждения иногда действуют отдельные возбудительные агрегаты, состоящие из небольшого асинхронного двигателя и возбудителя.
При пуске в ход мы уменьшаем при помощи реостата возбуждения генератора и, следовательно, подводимое к двигателю напряжение так, чтобы должным образом ограничить пусковой ток двигателя и в то же время ему взять с места с некоторым ускорением. Тем самым отпадает надобность в пусковом реостате, снижаются потери энергии в период пуска и облегчается управление операцией.
Регулирование скорости вращения по системе ГД ведется при заданном значении тока Ia, например, Ia Iн сonst.При этом изменении скорости от нуля до некоторого низшего предела ведется при постоянном потоке двигателя постоянного тока повышения напряжения генератора Uг. В этих условиях развиваемый двигателем момент М См дIa сonst, а мощность P M2 n n. Так как
n | У ИАР | СUг, | |
Ce д | |||
– | Рд Uг, т. | ||
Uг | на зажимах генератора. | ||
Дальнейшее увеличение скорости ведется при постоянном на- | |||
 е. мощность двигателя пропорциональна напряжению
е. мощность двигателя пропорциональна напряжениюпроставка генератора Uг путем последовательного уменьшения двигателя
д. В этих условиях мощность, потребляемая двигателя
Pд UгIa конст.
Таким образом, на первом этапе регулирования скорости ведется при постоянном моменте, на втором — при постоянной мощности.
В мощных прокатных установках (5..10 тыс. КВт) с большим числом реверсов в единицу времени (12..20 в минуту) используется так называемая система ГД, в которой генератор и двигатель постоянного тока имеют каждый свой особый возбудитель, причем управление установкой производится изменением тока в цепи возбуждения возбудителей. Это упрощает и облегчает управление мощностью возбудителей не превышают 2..3% от главной мощности машин. В качестве возбудителей системы ГД используют электромашинные усилители, автоматизирующие работу установки и эти повышающие ее характеристики.Система ГД позволяет получить быстрый пуск и реверсирование исполнительного двигателя без потерь в реостатах главной цепи. Для осуществления реверса дос-
В качестве возбудителей системы ГД используют электромашинные усилители, автоматизирующие работу установки и эти повышающие ее характеристики.Система ГД позволяет получить быстрый пуск и реверсирование исполнительного двигателя без потерь в реостатах главной цепи. Для осуществления реверса дос-
Рис. 5.19. Скоростные и механические характеристики двигателя при плавном изменении напряжения, подводимого к цепи якоря
таточно изменить на обратное направление тока возбуждения генератора постоянного тока при помощи переключателя П. (рис. 5.18.).
Торможение двигателя также путем прямого регулирования напряжения генератора.При этом, если, быстро уменьшается возбуждение генератора, делает его ЭДС меньше ЭДС двигателя, последний переходит в генераторный режим и возвращает энергию торможения обратно в сеть через генератор, который в этих условиях работает двигателем, заставляя работать генератором приводной двигатель переменного тока.
Если при работе системы ГД получаются резкие пики тока, то на вал приводного двигателя насаживают маховик, запасает энергию в период увеличения скорости двигателя и отдающий ее при уменьшении скорости. В этой системе (ГДМ) используется в качестве приводного только асинхронный двигатель, так как синхронный двигатель вращается со скоростью и, следовательно, не позволяет использовать постоянную энергию маховика.
В этой системе (ГДМ) используется в качестве приводного только асинхронный двигатель, так как синхронный двигатель вращается со скоростью и, следовательно, не позволяет использовать постоянную энергию маховика.
Система ГДМ дает возможность выровнять нагрузку и сильно сгладить пики тока в питающей сети переменного тока. Благодаря маховику мощность асинхронного двигателя часто можно выбрать меньше мощности двигателя постоянного тока.
В системы ЭМУ — Д генератор заменяется электромашинным усилителем, в системе МУ
— Д вместо генератора магнитный усилитель.В последнее время генератор заменяется тиристорным преобразователем (ТП). По сравнению с системой Г– Д установки ТП — Дайте меньшую массу и больший КПД.
Скоростные n f Ia и механические n f M характеристики двигателя независимого возбуждения Iв, Ra const и U var по-
казаны на рис. 5.19.
Они представляют собой параллельные друг другу линии, поскольку при одном и том же токе якоря Ia падение напряжения
Иа Ра и размагничивающее действие якоря остается одина-
ковыми для всех характеристик.
Частным случаем регулирования изменением напряжения является импульсное регулирование напряжения. В этом случае постоянное напряжение периодически
на якорь в виде отдельных импульсов (рис. 5.20). | |||||||||||
При таком питании сред- | |||||||||||
нее значение | напряжения | на | |||||||||
U | якоре, которое определяет час- | ||||||||||
Uср | тоту вращения двигателя, равно | ||||||||||
и | |||||||||||
т | т | Uср | т | U, (5. | |||||||
и | Т У | ||||||||||
ТЦ | где tи | ц | |||||||||
Рис.5.20. Импульсное регулирова- | и Tц — продолжитель- | ||||||||||
напряжение | ность импульса и их периода | ||||||||||
следования, соответственно. | |||||||||||
При импульсном питании | |||||||||||
Ia mах Ia min | Ia ср | в установившемся | режим | ток | |||||||
якоря | Ia будет иметь пульси- | ||||||||||
рующий характер, как показано | |||||||||||
tи | т | на рис. | |||||||||
Пульсирующий ток якоря | |||||||||||
ТЦ | можно | разложить | на | среднюю | |||||||
Рис.5.21. Изменение тока якоря при | (постоянная) | Iaср | и | перемен- | |||||||
импульсном регулирования напря- | ную составляющие. Вращаю- | ||||||||||
жения | щий момент создается | ||||||||||
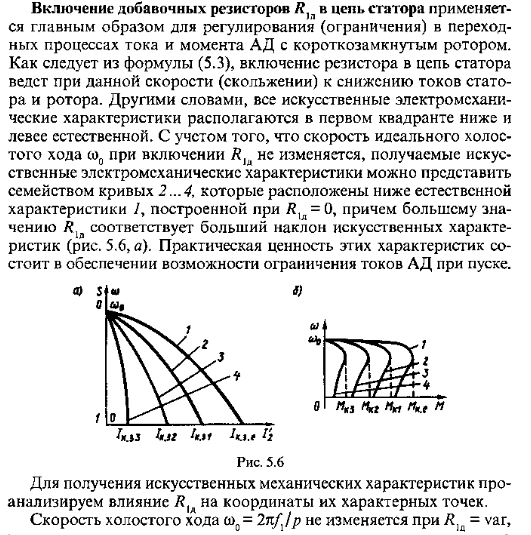 17)
17) 5.21.
5.21. постоянной составляющей тока.Переменная увеличивает потери и нагрев двигателя, а также снижает коммутацию. Особенноен режим прерывистого тока, когда Ia min 0 в опасном времени. Поэтому при
Особенноен режим прерывистого тока, когда Ia min 0 в опасном времени. Поэтому при
использовании импульсного регулирования необходимо снижать номинальную мощность двигателя, или использовать импульс для уменьшения изменяющей силы тока (например, с помощью сглаживающих фильтров). Пульсация тока якоря вызывает пропорциональным пульсациям электромагнитного момента и частоты вращения.Пульсации скорости при необходимости могут быть уменьшены путем искусственного увеличения момента инерции привода.
Регулировка частоты вращения изменением напряжения якоря был рассмотрен на примере параллельного и независи-
мого возбуждения. Однако все сказанное применимо и для двигателей последовательного и смешанного возбуждения. Путем изменения подводимого напряжения можно получить диапазон регулирования скорости от 10: 1 до 100: 1. Кроме того при этом способе регулирования частоты вращения КПД двигателя практически остается неизменным.Регулирование целесообразно осуществлять при постоянном моменте.
Регулировка скорости вращения двигателя последовательного возбуждения. Существуют следующие способы регулирования скорости вращения двигателя: а) изменением возбуждения, шунтированием или секционированием возбуждения, б) шунтированием обмотки якоря (рис. 5.22), в) включением сопротивления в цепи якоря (рис. 5.23), г) изменением напряжения.
Регулирование скорости вращения шунтированием обмотки возбуждения.Предположим, что U const, Mс const и что задан ток Ia при работе нешунтированного двигателя, т.е. при разомкнутом рубильнике (автомате) p1. При замыкании рубильника р1 режим ра-
боты двигателя изменяется, но как обмотка возбуждения обладает электромагнитной инерцией, то потокосцепления обмотки и становится, создаваемый ею магнитный поток 1 и
возбуждения стремятся остаться без изменений. Поэтому в ближайший после шунтирования момент времени ток в обмотке якоря
увеличится | на | отношение тока | в | шунте Iш и | составляет | |
Ia | Iв1 Iш1 | Ia1 Iш1. | Iш1) = | |||
См 1I1 Mc, | и на валу двигателя появляется положительный дина- | |||||
мический момент МДж М Мс, | под управлением которого двигатель | |||||
начинает большую скорость. | ||||||
 Следовательно, М См 1 (Ia1
Следовательно, М См 1 (Ia1Рис.5.24. Регулированиескорости двигателя последовательного возбуждения шунтированием обмотки возбуждения
Рис. 5.22. Схема регулирования скоростивращения двигателя последовательноговозбуждения
Рис. 5.23. Схема регулирования скорости вращения двигателя последовательного возбуждения включением сопротивления в
цепь якоря
Если пренебречь небольшим падением напряжения в цепи якоря, то уравнение ЭДС напишется в виде U = Ce n; отсюда видно,
что при увеличении n поток будет уменьшаться и, следовательно, будет уменьшаться ток Iв; это повлечет за собою
уменьшение тока в шунте Iш (закон разветвленных цепей) и тока в якоре Ia Iв Iш (рис. 5.24). Этот процесс параллельного изменения скорости n и токов Iв и Ia продолжается до
5.24). Этот процесс параллельного изменения скорости n и токов Iв и Ia продолжается до
тех пор, пока ток в якоре и поток возбуждения не приобретут таких значений Ia2 и 2, при
которых M M Cм 2Ia2 = Cм 1Ia1 Mc. При этом МJ 0, и двига-
Рис. 5.25. Механические характеристики двигателя последовательного возбуждения приразных способах регулирования скорости
тель начинает работать в новом установившемся режиме со скоростью
n | 2 | n | 1 | (рис.5.24). Соответственно току I | а | 2 | увеличивает подво- | |
1 | 2 | |||||||
димая | к | двигателю мощность P1 UIa2; | полезная мощность | |||||
P2 М2 n тоже увеличивается, причем КПД двигателя почти не из-
меняется, а при некоторых соотношениях между различными видами потерь может даже возрасти; в остальном оценке этого способа регулирования последовательного двигателя та же, что и в соответствующем случае двигателя возбуждения.
Рассматриваемый способ регулирования скорости широко применяется в электротяге. Коэффициент kо.п. называется коэффициентом регулирования. Обычно шунтирующее сопротивление выполняется регулируемым, так чтобы было kо.п. = 75%, 61,5% и 50%, но в некоторых слу-
чаев поле ослабляют еще сильнее. При работе тягового двигателя на линии приходится считаться с помощью отрыва токоприемника от контактного провода, когда двигатель работает без тока, и последующим его в сеть.Если обмотка возбуждения шунтируется только активным сопротивлением, то из-за ее индуктивности ток пойдет в первый момент после восстановления с сетью только по шунтирующему сопротивлению. Двигатель не разовьет обратной ЭДС и ток включения может превы-
сить допустимые пределы. Чтобы избежать этого, сделать шунтирующее сопротивление индуктивным таким расчетом, чтобы распределение тока между обмоткой возбуждения и шунтом в переходном процессе приближалось к распределению тока в установившемся режиме.
Изменение магнитного потока в двигателе последовательного возбуждения осуществляется шунтированием обмотки возбуждения с помощью реостата rш (рис.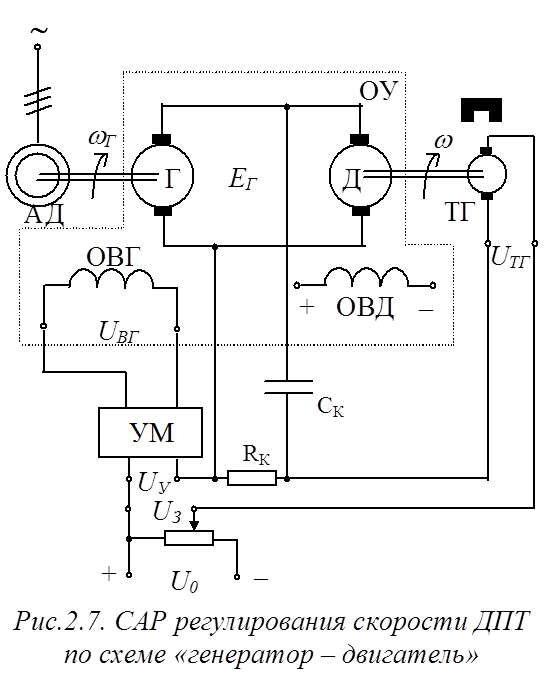 5.22). Чем меньше сопротивление rш, тем меньше ток возбужде-
5.22). Чем меньше сопротивление rш, тем меньше ток возбужде-
Iв и магнитный поток и тем больше частота вращения.
Из-за максимальной скорости в машинах нормального исполнения диапазон регулирования частоты вращения путем изменения магнитного потока составляют (1,5..2,5): 1. Регулирование вращения вращения магнитного потока является одним из наиболее простых и экономичных способов и поэтому находит широкое применение.Из-за увеличения механических потерь при увеличении частоты вращения КПД двигателя будет несколько уменьшаться.
Регулировка скорости шунтированием обмотка якоря. При шунтировании обмотки якоря (рис. 5.22) рубильник р1 разомкнут,
рубильник р2 замкнут. Ходуждения остается тот же, но разница
та, что в данном случае в ближайшем после шунтирования момент времени возбуждения остается без изменения, а ток в якоре уменьшает на значение тока, ответвившееся в шунтирующее сопротивление; Этот двигатель начинает отрицательный момент ускорения, и двигатель замедляет скорость своего вращения.
По окончании процесса ток в якоре будет меньше первоначального, а ток в обмотке возбуждения и, следовательно, ток, текущий из сети, увеличивается. Соответственно этому возрастает потребляемая
двигатель | мощность Р1, тогда как | его полезная мощность |
Р2 2 нМ2 | уменьшается. Отсюда следует, | что данный способ регулятора- |
лирования скорости двигателя последовательного возбуждения весьма неэкономичен.Поэтому он используется только там, где стоимость не является основным фактором, как, например, в литейных цехах, требуется на короткое время сильно уменьшить скорость двигателя. В некоторых установках скорость по этому способу регулируется в пределах 1: 5 и выше.
На рис. 5.25 сопоставлены построенные в стандартных характеристиках (Mн 1 и nн 1) механические характеристики-
го двигателя при различных способах регулирования скорости: кривая 1 — естественная механическая характеристика, кривые 2 и 3 соответствуют коэффициентам ослабления возбуждения Ко. в. 0,6 и
в. 0,6 и
Ко.в. 0,3, кривая 4 соответствует характеристике при шунтированной обмотке якоря, кривая 5 получена при включении сопротивления в цепи якоря, а кривая 6 представляет собой характеристику при U 0,5Uн
Регулировка скорости включения сопротивления в цепи якоря.
(рис. 5.23). Этот способ позволяет регулировать n вниз от номинального значения. Так как при одновременно этом значительно уменьша-
ется КПД, то такой способ регулирования находит ограниченное применение.
Характеристика n f (M) для такого способа регулирования ско-
рости при Rpa * = 0,5 изображена на рис. 5.26 в виде кривой 5.
Регулировка скорости изменением. Этим спосо-
бом можно регулировать вниз от номинального значения с сохранением высокого КПД. Рассматриваемый способ регулирования применяется в каждой ведущей оси устанавливается отдельный двигатель и регулируется путем переключения двигателей с параллельного включения в сеть на последовательное (рис. 5.26). На рис. 5.25 кривая 6 представляет собой характеристику n f (M) для этого случая при U 0,5Uн.
5.26). На рис. 5.25 кривая 6 представляет собой характеристику n f (M) для этого случая при U 0,5Uн.
Рис. 5.26. Параллельное и последовательное включение двигателей последовательного возбуждения для изменения скорости
Регулировка скорости вращения коллекторного двигателя постоянного тока
Двигатели постоянного тока и мотор-редукторы, созданные на их основе, нуждаются в надежной системе управления скоростью вращения вала.Простым и методом решения проблемы является применение широтно-импульсной моду (ШИМ). Способ основан на преобразовании напряжения постоянного в импульсное. При этом управлении вращением осуществляют путем изменения длительности подающегося импульса.
Например, по такому же принципу использовать ШИМ схему в осветительных приборах для регулировки яркости свечения светодиодных ламп. Так как у светодиода небольшое время затухания частота работы устройства регулирования имеет большое значение. Качественные приборы должны полностью исключить мерцание при низкой яркости свечения.
Качественные приборы должны полностью исключить мерцание при низкой яркости свечения.
Управление двигателями постоянного тока методом ШИМ стало возможным благодаря силе инерции. После прекращения подачи напряжения на обмотки вал электродвигателя устанавливается не сразу, продолжая движение по инерции. Путем кратковременной подачи напряжения с определеннымом можно добиться плавного регулирования скорости вращения вала. При этом главным регулирующим параметром является размер паузы между импульсами.
Применение устройства управления для двигателя постоянного тока
Этот метод управления двигателем постоянного тока позволяет плавно увеличивать скорость вращения вала в широких пределах. ШИМ делает возможным изменение параметров работы двигателя в автоматическом режиме в соответствии с установленными данными. Необходимую информацию регулятор оборотов коллекторного двигателя получает от пользователя или специальный датчик, который определяет температуру, скорость вращения или любой другой параметр. Например, в воздушной системе охлаждения регулятор оборотов изменяет скорость вращения вентилятора на основе данных, полученных от датчика температуры. Это позволяет автоматически замедлять скорость потока воздуха при низкой температуре и увеличивать при высокой.
Например, в воздушной системе охлаждения регулятор оборотов изменяет скорость вращения вентилятора на основе данных, полученных от датчика температуры. Это позволяет автоматически замедлять скорость потока воздуха при низкой температуре и увеличивать при высокой.
Схема управления коллекторным двигателем постоянного тока
Простую схему управления
двигателем постоянного тока можно собирать из полевого транзистора. Он играет роль электронного ключа, который переключает схему питания двигателя после подачи напряжения на базу.Электронный ключ остается открытым на время, соответствующее длительности импульса.
ШИМ сигнал характеризуют коэффициенты заполнения, который равен обратной величие скважности. Коэффициент заполнения отношения продолжительности сигнала к периоду его подачи. Скорость движения вала двигателя будет пропорциональна значению заполнения заполнения. Поэтому, если частота ШИМ сигнала слишком низкая для обеспечения стабильной работы, то вал двигателя будет вращаться заметными рывками. Чтобы гарантированное плавное регулирование и стабильную работу частота превышала герц.
Чтобы гарантированное плавное регулирование и стабильную работу частота превышала герц.
Оптимальные значения частоты ШИМ сигнала
Частота может действовать в широких пределах от нескольких десятков до нескольких сотен герц. Благодаря емкостной нагрузке происходит сглаживание импульсов. В итоге на двигатель подается «постоянное» напряжение средней величины в зависимости от параметров управляющей системы. Например, если двигатель получает питание от сети напряжением 10В, и к нему идет регулятор с импульсностью равной половины периода подачи, то получается эффект будет таким же, как при подаче 5В на двигатель напрямую.
Сложности при ШИМ регулирование скорости двигателя постоянный тока
ШИМ является популярным методом регулирования аналоговым напряжением в различныхах. При использовании этого метода регулирования пользователь может столкнуться с непредсказуемым поведением двигателя. Например, вал может начать вращение в обратную сторону. Это происходит при низких емкостных нагрузках. В коллекторных двигателях в процессе работы происходит постоянное переключение обмоток якоря.Когда подключают регулятор, происходит отключение и включение питания с соответствующими характеристиками. Дополнительная коммутация в сочетании с коллекторной может привести к проблемам с эксплуатацией двигателя. Поэтому устройства управления с ШИМ должны быть тщательно продуманы и проработаны.
Это происходит при низких емкостных нагрузках. В коллекторных двигателях в процессе работы происходит постоянное переключение обмоток якоря.Когда подключают регулятор, происходит отключение и включение питания с соответствующими характеристиками. Дополнительная коммутация в сочетании с коллекторной может привести к проблемам с эксплуатацией двигателя. Поэтому устройства управления с ШИМ должны быть тщательно продуманы и проработаны.
Также причиной нестабильной работы электродвигателя может стать влияние силы тока на скорость вращения ротора, которая находится в зависимости от уровня приложенного напряжения.Проблемы могут при эксплуатации двигателей на малой скорости по отношению к номинальному значению.
Например, у пользователя есть двигатель, который при номинальном напряжении вращает ротор со скоростью 10об / сек. Чтобы понизить скорость до 1 об / сек недостаточно просто снизить напряжение до 1В. Подобрать напряжение подходящее значение требуемого сложно и если пользователю и удастся, то при незначительном изменении условий эксплуатации скорость снова изменится.
Решением проблемы является применение системы автоматического регулирования или кратковременное включение электродвигателя на полную мощность. Движение ротора будет происходить рывками, но при правильной подобранной частоте и длительности импульсных импульсов можно сделать вращение более стабильным. Так, добивается устойчивого движения вала электродвигателя с любой скоростью, которая не будет меняться в зависимости от нагрузки.
Реализация ШИМ
Многие модели современных ПЛК контроллеров предоставляют возможность организации ШИМ.Но иногда доступными каналами оказывается достаточно и приходится использовать программу обработки прерывай.
Алгоритм реализации ШИМ:
- В начале каждого импульса единицу и ждем повышения значения до заданного уровня.
- Сбрасываем линию на ноль.
Длительность импульса легче отследить с периодичностью или ступенями. Например, десять регулировочных ступеней соответствуют 10% от средних значений.Прежде всего необходимо определиться с параметрами частот и количеств ступеней регулирования. Далее, умножают данные значения. Результат произведения предоставит частоту прерываний таймера.
Например, десять регулировочных ступеней соответствуют 10% от средних значений.Прежде всего необходимо определиться с параметрами частот и количеств ступеней регулирования. Далее, умножают данные значения. Результат произведения предоставит частоту прерываний таймера.
При желании можно выбрать подходящую частоту таймера или ступеней регулирования и расчетов находят частоту импульсов.
Так же по теме регулирования скорости коллекторного двигателя Предлагаем статью «Управление коллекторным двигателем постоянного тока методом ШИМ»
Двигатель постоянного тока с параллельным возбуждением: принцип работы
Двигатель постоянного с параллельным возбуждением — это электродвигатель, у которого обмотки якоря и возбуждения подключаются друг к другу параллельным возбуждением.Он превосходит агрегаты последовательного типа в случаях.
Характеристики двигателя постоянного тока с параллельным возбуждением
Формула общего тока, идущего от источника, выводится согласно первому закону Кирхгофа и вид: I = I я + I в, где I я — ток якоря, I в — ток возбуждения, а I — ток, который двигатель потребляет от сети. Следует отметить, что при этом I в не зависит от I я , т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
Следует отметить, что при этом I в не зависит от I я , т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
В целом данные электродвигатели отличаются весьма полезными тяговыми органами:
- Высокая экономичность (поскольку ток якоря не проходит через обмотку возбуждения).
- Устойчивость и непрерывность рабочего цикла при колебаниях нагрузки в широких пределах (т.к. величина момента сохраняется даже в случае изменения числа оборотов вала).
При недостаточном моменте пуск осуществляется посредством перехода на смешанный тип возбуждения.
Сферы применения двигателя
частота вращения подобных двигателей остается постоянной даже при изменении нагрузки, они широко применяются в работе с:
- вентиляторами;
- насосами;
- шахтными подъемниками;
- подвесными электрическими дорогами;
- станками (токарными, металлорежущими, ткацкими, печатными, листоправильными и пр. ).
 ).
).Таким образом, этот вид двигателей в основном используется с механизмами, требующими постоянного вращения скорости или ее широкой регулировки.
Регулировка частоты вращения
Регулировка скорости — это целенаправленное изменение скорости электродвигателя в принудительном порядке при помощи специальных устройств или приспособлений. Оно позволяет использовать режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Существует три основных метода регулирования скорости двигателя:
- Изменение магнитного потока главных полюсов. Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и возбуждения I в уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических сохранений. Не рекомендуется увеличивать частоту вращения методом более чем в два раза.
- Изменение сопротивления цепи якоря. К якорю последовательностью подключается регулировочный реостат. Скорость вращения якоря уменьшается при увеличении сопротивления реостата, а наклон механических увеличивается. Регулировка скорости вышеуказанным способом:

- повышения частоты вращения относительно естественных характеристик;
- связана с большой величиной потерь в регулировочном реостате, следовательно, неэкономична.
- Безреостатное изменение воздействия на якорь напряжения. В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или системы вентиляторов.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения как раз и реализует третий принцип регулирования скорости. Его отличие в том, что обмотка возбуждения и магнитное поле главного полюсов подключаются к разным источникам.Ток возбуждения является вводной характеристикой, а магнитное поле меняется. При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики прежней.
При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики прежней.
Таким образом, принцип работы системы независимого надзора за независимым возбуждением — это более сложным авиационным комплексом систем двух систем, тем не менее, его главное преимущество — большая экономичность.
Регулировка скорости в электроприводах | Электрооборудование и автоматизация сельскохозяйственных агрегатов
Страница 15 из 59
Глава 9.РЕГУЛИРОВАНИЕ СКОРОСТИ В ЭЛЕКТРОПРИВОДАХ. ВЫБОР РЕЗИСТОРОВ
ОСНОВНЫЕ ПОКАЗАТЕЛИ РЕГУЛИРОВАНИЯ СКОРОСТИ
Регулировка скорости электропривода — принудительное изменение скорости исполнительного органа энергетического машинного устройства. Изменяется скорость при дополнительном воздействии на электродвигатель со стороны управляющего и преобразовательного устройств или при помощи специальных механических передач. В настоящее время чаще применяется электрическое регулирование.В этом случае упрощается кинематическая схема машинного агрегата, улучшаются технико-экономические экономические. Такой электропривод представляет собой более совершенную форму привода.
Такой электропривод представляет собой более совершенную форму привода.
Основными критериями, которые руководствуются при выборе способа регулирования скорости, диапазона, плавности, экономичности регулирования и стабильности работы на заданной скорости.
Диапазон изменения скорости определяется отношением значений наибольшей и наименьшей скоростей при номинальной нагрузке двигателя.
Плавность состоит из ступеней внутри регулирования: чем больше ступеней, тем больше плавность.
Экономичность регулирования оценивается по приведенным затратам, которые зависят в основном от потерь энергии и капитальных вложений.
Стабильность работы определяется жесткостью механических характеристик двигателя.
Регулируемые приводы применяют в кормоприготовительных агрегатах и на раздаче корма, в сенажной башне для равномерного разбрасывания травяной массы и вентиляционных установках животноводческих помещений, в металлорежущих станках и испытательных установках ремонтных предприятий. Область применения их с каждым годом расширяется.
Область применения их с каждым годом расширяется.
РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
В электропривода с плавным, в большом диапазоне регулирования скорости, обычно применяют двигатели постоянного тока.
Из соотношений (8.5) и (8.7) вытекает, что возможны три способа принудительного изменения скорости:
уменьшением магнитного потока; изменением напряжения на якоре, сопротивлением якорной цепи.
Рис. 9.1. Электромеханические (а) и механические (б) характеристики двигателя с независимым возбуждением:
1 — при уменьшении тока возбуждения; 2 — при снижении напряжения на якоре.
Уменьшить ток возбуждения, а вместе с ним и магнитный поток электродвигателя с независимым возбуждением можно при помощи переменного тока или регулируемого источника питания.
Так как ток обмотки возбуждения невелик (не более 5% от номинального), аппараты эти просты и недороги, а потери энергии в них малы.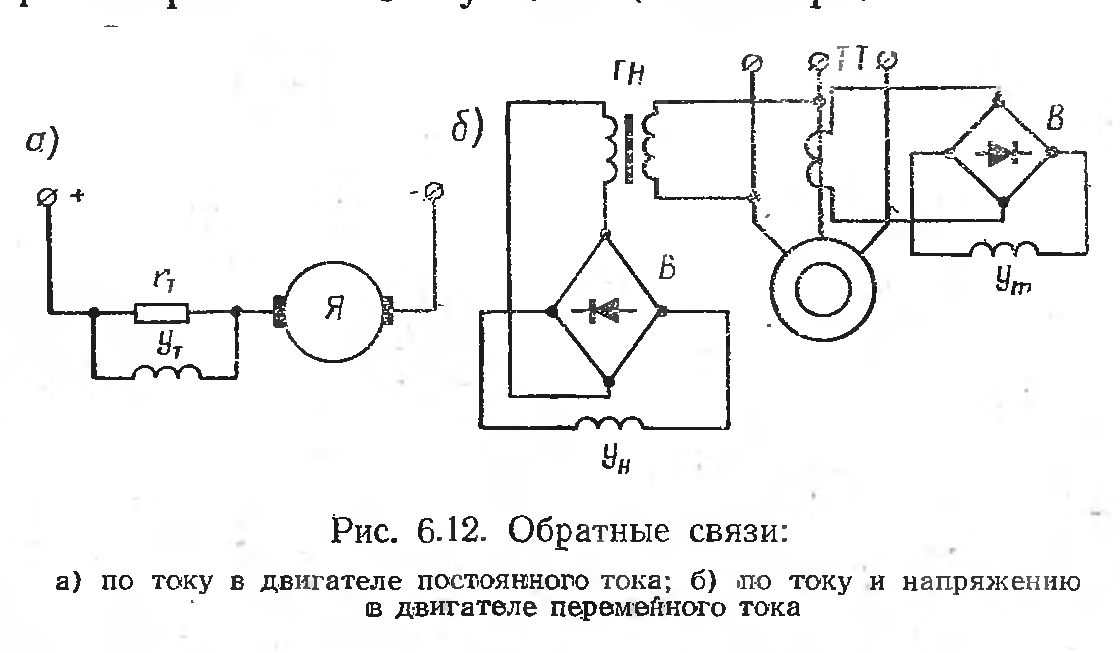
Из рисунка 9.1 (в зоне 1 показаны механические и электромеханические характеристики электродвигателя при разных магнитных потоках, причем Ф2 <Ф1 <Фн) наглядно видно, что угловая скорость увеличивается с уменьшением магнитного потока. На холостом ходу скорость обратно пропорциональна величине магнитного потока.
Если есть момент сопротивления, скорость снижается, но если Мс не слишком велик, она остается большей, чем при номинальном магнитном потоке.
Для серийных электродвигателей двукратное увеличение частоты вращения, для специального — трехкратное. Большое увеличение скорости сопряжено с опасностью механических повреждений и сильным искрением щеток.
Если момент сопротивления постоянен, то ослабление магнитного потока ток в якоре возрастает. Двигатель надо выбирать с учетом этих обстоятельств или уменьшать момент нагрузки по мере увеличения частоты вращения, чтобы осуществлять регулирование при постоянной мощности.Механические характеристики по мере ослабления магнитного потока менее жесткими.
Искусственные механические и электромеханические характеристики электродвигателя при изменении напряжения на зажимах якоря, которые представлены в виде графиков на рисунке 9.1 (а, б) (зона II), параллельны естественной, следовательно, жесткость их не меняется. Это позволяет снизить частоту вращения в 5 … 6 раз по сравнению с номинальной и иметь достаточно стабильный скоростной режим.
Рис.9.2. Схема регулируемого электропривода постоянного тока системы регулируемый автотрансформатор — выпрямитель— двигатель:
Т — автотрансформатор; М — электродвигатель; VI … VS диоды.
Регулирование скорости можно осуществлять с постоянным моментом сопротивления, не завышая номинальную мощность электродвигателя. Пуск двигателя осуществляется на пониженном напряжении.
В качестве источника питания — регулятора напряжения применяют устройства, которые преобразуют переменный ток в постоянный и регулируют значение выпрямленного напряжения.Обмотка возбуждения подключается к отдельному нерегулируемому преобразователю.
Наиболее простой регулятор-преобразователь (рис. 9.2) состоит из регулируемого автотрансформатора Т и выпрямительного моста. Напряжение плавно регулируется автотрансформатором, затем выпрямляется диодами. Обмотка возбуждения электродвигателя в приводе получает питание от выпрямителя, подключенного к той же сети переменного тока.
Механические характеристики электродвигателя при такой схеме включения менее естественная, из-за дополнительных потерь напряжения в автотрансформаторе и диодах.Такая схема применяется в приводх мощностью до 1 … 2 кВт.
Электропривод системы генератор — двигатель имеет электромашинный агрегат, который преобразует переменный трехфазный ток в постоянный регулируемого напряжения при помощи асинхронного двигателя и генератора постоянного тока. Напряжение генератора изменяется за счет тока в обмотке возбуждения. Эта система, называемая сокращенно Г — Д, применима для любых мощностей. Недостатки — большая металлоемкость, наличие вращающихся машин, низкий к. п. д.
п. д.
В последнее время широко применяются дроссельные и тиристорные преобразователи — регуляторы, которые запускаются в систему 13. С помощью этих преобразователей выпускаются комплектные электроприводы.
Например, приводы ПМУ состоят из регулятора напряжения с магнитным усилителем и электродвигателя.
Наиболее перспективны тиристорные электроприводы. Комплектные тиристорные электроприводы серии ЭТО выпускаются на мощность от 0,1 до 1,7 в четырех модификациях.В комплект электропривода ЭТО1 (рис. 9.3) входят электродвигатель постоянного тока М, тиристорный преобразователь ГП, сглаживающий дроссель L, регулятор скорости RC, промежуточный полупроводниковый усилитель У, система импульсно-фазового управления и блок питания цепей управления.
Тиристорный преобразователь, собранный на однофазной мостовой неуправляемой схеме с диодами VI … V4 и тиристором V6, система управления тиристором генератора содержит импульсный трансформатор Т2 и фазосдвигающее устройство, состоящее из пилообразного напряжения ГПН и формирователь импульсов устройства ФИ.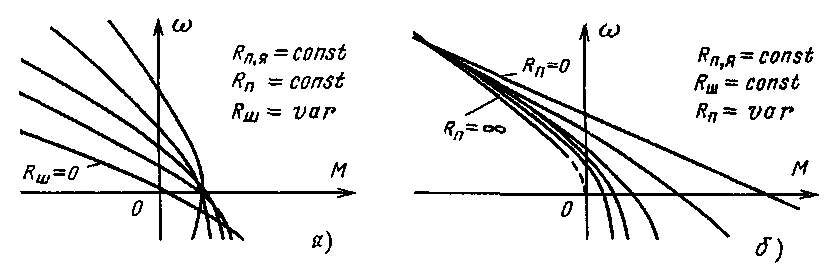 Привод представляет собой замкнутую систему автоматического управления с обратной отрицательной связью по противо-э.д.с. и положительной по току двигателя, снятой с тахомоста (R2, R3), обеспечивающую регулирование угловой скорости в диапазоне 1: 20 с перепадом скорости не более 10%.
Привод представляет собой замкнутую систему автоматического управления с обратной отрицательной связью по противо-э.д.с. и положительной по току двигателя, снятой с тахомоста (R2, R3), обеспечивающую регулирование угловой скорости в диапазоне 1: 20 с перепадом скорости не более 10%.
Стабильность скорости достигается тем, что на вход усилителя подается напряжение, равное разности двух: тахомоста Uм и регулятора задатчика скорости U3. За счет этого уменьшения э. д. с. и увеличение напряжения тока автоматически приводит к тому, что усиленный сигнал на выходе усилителя обеспечивает более раннее открытие тиристора и стабилизацию.
Пуск электродвигателя форсированный, с ограничением форсировки стабилитроном V7 и углом упреждающего токоограничения V8, R5, поддерживающий пусковой ток в пределах (1,5 … 2). Динамические характеристики обеспечиваются также корректирующей цепочкой R1, С1. Тиристор защищен от перенапряжений на сторонах постоянного и переменного тока цепочки RC.
Рис. 9.3. Электрическая принципиальная схема комплектного однофазного тиристорного электропривода постоянного тока.
9.3. Электрическая принципиальная схема комплектного однофазного тиристорного электропривода постоянного тока.
Изготовляются более мощные комплектные тиристорные электроприводы, например ПТЗ, с питанием от трехфазной цепи мощностью до 8 кВт, в стабилизации скорости обеспечивается за счет отрицательной обратной связи по скорости, получаемой при помощи тахогенератора.
Регулирование вращения электродвигателей вводят резисторы в цепи якоря (реостатное регулирование) применяют только для двигателей малой мощности. При включении резистора скорость уменьшается.
Диапазон регулирования не постоянен, зависит от нагрузки и не превышает 1: 3. Искусственные характеристики имеют малую жесткость. Регулировка регулируется дополнительными усилиями, в виде тепла выделяется в регулируемом реостате. Резисторы из за этого получаются громоздкими.Особенно велики потери при регулировании с постоянным моментом.
Реостатное регулирование применяется как основной способ в электроприводах двигателя последовательного возбуждения небольшими мощностями и универсальными.
Потери энергии в роторной цепи велики, они пропорциональны моменту и скольжению.
ВЫБОР РЕЗИСТОРОВ ДЛЯ ЭЛЕКТРОДВИГАТЕЛЕЙ
Для пуска и регулирования частоты вращения двигателя, асинхронных с фазным ротором и постоянного тока, необходимы резисторы или регуляторы напряжения.
Ручной пуск осуществляют при помощи стандартных резисторов (пусковых реостатов).
Пусковые реостаты серии РП предназначены для ручного пуска двигателей постоянного тока мощностью до 4 кВт, реостаты РЗП для двигателей от 4 до 42 кВт.
Серия РП имеет один типоразмер, серия РЗП — 5 типоразмеров.
При одинаковом размере пусковые реостаты различаются номинальными токами элементов и числом ступеней. Реостат РЗП-2, например, имеет номинальный ток до 40 А, число ступеней 7.Они предназначены для двигателей мощностью до 7 кВт.
Для пуска двигателей с фазным ротором изготавливают пусковые реостаты с масляным охлаждением ПР-17,5 и ПР-29,5. Первый для двигателей мощностью до 17,5 кВт, предназначен второй— для двигателей мощностью до 29,5 кВт. Реостаты допускаются от 5 до 3 пусков подряд, длительность одного пуска не должна быть более 10 … 18 с.
Реостаты допускаются от 5 до 3 пусков подряд, длительность одного пуска не должна быть более 10 … 18 с.
Технические параметры пусковых реостатов приводятся в соответствии с номинальными данными электродвигателя, и выбирать тот или иной тип реостата.
При автоматизированном пуске используются стандартные ящики резисторов, выпускаемых нашими заводами. Их применяют в качестве в пусковых, пускорегулировочных, тормозных и регулировочных сопротивлений для двигателей постоянного и переменного тока. Ящики резисторов ЯС-1 состоят из 40 чугунных литых элементов, каждый из которых может иметь сопротивление от 0,28 до 0,038 Ом; длительно допустимый ток от 20 до 55 А. Выпускаются ящики резисторов с фехралевыми и константановыми элементами, рассчитанными на меньшие токи и большие сопротивления.
Для того, чтобы выбрать тот или иной ящик резисторов, надо рассчитать число ступеней и значения их омических сопротивлений. Эти расчеты для двигателей возбуждения и двигателей с фазным ротором одинаковы.
Для расчета пусковых резисторов могут быть заданы два условия.
- Известно число ступеней пускового сопротивления т.
- Неизвестно число ступеней сопротивления.
При автоматизированном управлении приходится особенно считаться с числом ступеней, так как каждая ступень требует установки реле и контакторов.Для приводов средней мощности число ступеней принимают обычно 2 … 4.
При графическом методе расчета чертят семейство механических характеристик электродвигателя таким образом, чтобы рациональный пуск, для этого:
чертят естественную характеристику двигателя 1 (рис. 9.6) в относительных единицах;
задаются значениями момента момента М1, момента переключения при пуске М2 и проводят вертикальные пунктирные линии;
наносят искусственные характеристики 2 и 3.
Прямая 2 проходит через идеального холостого хода О и начального пускового момента А. Прямую 3 проводят из точки О в точку В, находящуюся на линии момента М1 в месте пересечения 2 с вертикальной линией прямого момента М2. Данная пусковая диаграмма соответствует рациональному ступенчатому пуску.
Данная пусковая диаграмма соответствует рациональному ступенчатому пуску.
При включении двигателя с двумя резисторами (точка А) он начинает разгоняться. Когда момент снизится до величины М2, резистор R2 шунтируется и двигатель переходит на новую характеристику 3 в точку В.Момент двигателя снова возрастает до значения M1. Последующий разгон и переход на новую характеристику осуществляется аналогично.
5 Механические характеристики и способы регулирования скорости двигателей постоянного тока
2.4. Механические характеристики и способы регулирования скорости двигателей постоянного тока последовательного и смешанного возбуждения
2.4.1. Электромеханические и механические характеристики ДПТ последовательного возбуждения (ПВ)
Схема подключения ДПТ ПВ приведена на рис.2.55. В независимом возбуждении происходит отключение возбуждения ОВМ, состоящее из нескольких включенных якорем и через ОВМ, протекает якоря I я .
момент
Исходные выражения для электромеханической, механической характеристики и ДПТ ПВ можно записать в том же виде, что и для ДПТ независимого возбуждения. .уравнение (2.14) — (2.16)),
w ä =; w ä =; (2.47)
М = сФ I я.
В отличие от ДПТ НВ в этих выражениях сопротивления R я включает в себя сопротивление обмотки возбуждения. Второе, наиболее важное отличие заключается в том, что магнитный поток Φ является функцией тока якоря. Зависимость магнитного потока Φ от тока не является аналитической кривой (см.рис. 2.56), что не позволяет получить аналитические выражения для электромеханической и механической характеристики ДПТ ПВ. Приведенные уравнения позволяет провести лишь качественный анализ.
Приведенные уравнения позволяет провести лишь качественный анализ.
Естественная электромеханическая и механическая характеристики двигателя показаны на рис. 2.56, рис. 2.57, кривые 1. Очевидно, что при I я = 0 магнитный поток также равен нулю, и угловая скорость за счет первого слагаемого в выражениях (2.47) стремится к бесконечности (как говорят двигатель идет «вразнос»), т.е. режим холостого хода для ДПТ ПВ является недопустимым.
При возрастании тока якоря магнитный поток Ф вначале растет примерно пропорционально току якоря, а скорость резко снижается (крутопадающий участок на характеристиках).
При больших токах двигатель работает в зоне близкой к насыщению. Поэтому его магнитный поток здесь мало меняется при изменении тока и характеристика становится более жесткой, приближаясь по виду к характеристике ДПТ НВ.
На практике для расчетов используют, так называемые, универсальные характеристики ДПТ ПВ, которые приводятся в каталогах.
2.4.2. Способы регулирования угловой скорости ДПТ ПВ
Для ДПТ ПВ, как и для ДПТ НВ, возможны три основных метода регулирования скорости: 1) введением добавочных сопротивлений в цепь якоря; 2) изменением подводимого напряжения; 3) изменением возбуждения.
Регулирование угловой скорости добавочных сопротивлений является простейшим способом регулирования и широко используется в подъемных и транспортных механизмах.Как следует из уравнений (2.47), при увеличении добавочного сопротивления R д второе слагаемое в этих выражениях увеличивается, т.е. увеличить падение скорости от нагрузки. Соответственно, электромеханическая и механическая характеристики в области токов становятся более крутопадающими (кривые 2 на рис. 2.56, рис. 2.57 — характеристики с R д ). Введение добавочных сопротивлений в цепь якоря ДПТ ПВ позволяет, как и для ДПТ НВ, регулировать скорость в относительно небольшом диапазоне и ограничивать ток якоря при пуске.Обычно добавочных сопротивлений изменяют ступенями с помощью релейно-контакторной аппаратуры, как изложено в п. 2.2.2.
Основные недостатки такого регулирования — значительные потери в добавочном сопротивлении, небольшой диапазон регулирования, ступенчатость регулирования.
Регулировка угловой скорости изменением подводимого напряжения может быть осуществлено так же, как для ДПТ НВ, с помощью отдельного генератора или тиристорного преобразователя.Регулирование ведется уменьшением подводимого напряжения и приводит, как следует из соотношений (2.47), к снижению скорости. В транспортных механизмах часто два тяговых двигателя одинаковой мощности работают как многодвигательный электропривод (например, двухосный тяговый электропривод). При этом появляется возможность дополнительной ступенчатого изменения подводимого к двигателю за счет переключения двигателей с последовательного параллельного включения. При последовательном включении на каждый двигатель приходится половина напряжения сети.Когда двигатели подключаются параллельно, каждый из них оказывается включенным на полное напряжение сети. Такое регулирование позволяет исключить нерациональную трату энергии.
Регулировка угловой скорости ослаблением возбуждения позволяет, как и для ДПТ НВ, получить скорость выше основного. Действительно, как следует из уравнений (2.47), уменьшение потока Φ приводит при том же токе якоря к возрастанию первого слагаемого. Ослабление возбуждения возбуждения обычно осуществляют за счет шунтирования возбуждения возбуждения добавочным сопротивлением.
. при малых, тем самым обеспечивается естественное регулирование скорости движения при изменении сопротивления перемещению;
2) транспортные и грузоподъемные механизмы требуют больших начальных моментов при пуске, именно такие моменты обеспечивают ДПТ ПВ; у ДПТ НВ момент пропорционален току: М ~ I , а у двигателей последовательного возбуждения М ~ I 2 .А так как при пуске двигателя I = (1,5-2,0) I н , то двигатели последовательного возбуждения развивают значительно больший пусковой момент по сравнению с ДПТ НВ;
3) момент ДПТ ПВ не зависит от напряжения питающей сети, что особенно важно для электрической тяги, где в контактной сети возникают большие отклонения напряжения.
Основным недостатком ДПТ ПВ является неограниченная возрастающая скорость при малых токах якоря и, как следствие, невозможность обеспечить режим генераторного торможения.
2.4.3. Тормозные режимы ДПТ ПВ
Для ДПТ ПВ возможны два тормозных режима: торможение противовключением и динамическое торможение.
При торможении противовключением в цепи вводится добавочное сопротивление для ограничения тока якоря. Механические характеристики при этом являются продолжением характеристик двигательного режима в области отрицательной угловой скорости (см. Рис. 2.56, рис. 2.57). Такой режим торможения, как и для ДПТ НВ, может возникнуть, когда момент на валу двигателя превышает значение М 1 (рис.2.57).
Динамическое торможение ДПТ ПВ может осуществляться двумя способами: с самовозбуждением и независимым возбуждением. По первому способу якорь и обмотка возбуждения отключаются от сети и замыкаются добавочное сопротивление (рис. 2.58). При этом обмотку возбуждения или якорь переключают так, чтобы направление тока в обмотке возбуждения не изменилось.Если этого не сделать, то произойдет размагничивание машины.
При использовании второго способа динамического торможения с независимым возбуждением, обмотку якоря замыкают на добавочное сопротивление, а на обмотку возбуждения возбуждения источника. Схема включения при этой аналогичной схеме динамического торможения ДПТ НВ (рис. 2.22), аналогичные и получаемые тормозные характеристики.
Оба рассмотренных тормозных режима ДПТ ПВ мало экономичны, т.к. энергия теряется на добавочных сопротивлений.
В транспортных средствах очень важно обеспечить отдачу (рекуперацию) в сети, например, при движении на спуске. Однако, как уже отмечалось, генераторное торможение ДПТ ПВ невозможно. Чтобы решить эту проблему, в электротяге используют переключение обмотки возбуждения ДПТ с последовательного на независимое. Для этого отключают обмотку возбуждения от якоря, возбуждающего на нее через добавочное сопротивление сети. В результате машина работает с независимым возбуждением.Генераторное торможение такой машины рассмотрено в п. п. 2.2.5, 2.3.5.
2.4.4 Механические характеристики и регулирование скорости ДПТ
смешанного возбуждения (СВ)
Схема подключения ДПТ СВ приведена на рис. 2.59. Машина имеет две обмотки возбуждения: последовательную ОВМ1 и независимую ОВМ2.
Уравнения для электромеханической и механической модели двигателя аналогичные уравнения для ДТП ПВ:
w д =; w ä =; (2.48)
Причем здесь магнитный поток определяется как сумма магнитных потоков Φ 1 — обмотки ОВМ1 и Φ 2 — ОВМ2
Φ = Φ 910 .
Для ДТП СВ, в отличие от ДПТ ПВ, скорость идеального холостого хода имеет конечное значение и определяется потоком Φ 2 :
w 0 =.
Механическая характеристика двигателя смешанного возбуждения (кривая 3 на рис.2.60) занимает промежуточное положение между характеристикой ДПТ НВ — кривая 1 и характеристикой ДПТ ПВ — кривая 2. Скорость ДПТ СВ при малых нагрузках изменяется значительно. А при больших нагрузках характеристика достаточно жесткая и близка к линейной, как у ДПТ НВ (см. Соответствующие пояснения в п..2.4.1).
Для ДПТ СВ возможны те же тормозные режимы, что и для ДПТ НВ: 1) генераторное; 2) динамическое; 3) противовключением.
Генераторное торможение соответствует участку характеристики при скорости большей w 0. При переходе в режим генераторного торможения ток в якоре и в обмотке последовательного возбуждения меняет свой знак, что может размагнитить машину. Поэтому при возрастании скорости до w 0 ОВМ1 обычно шунтируют, и машина работает как ДПТ НВ.
Для динамического торможения якорь двигателя замыкают добавочное сопротивление, а ОВМ1 отключают, чтобы избежать размагничивания. В результате машина работает как ДПТ НВ, и имеет такие же тормозные характеристики.
При торможении противовключением в цепи якоря вводит добавочное сопротивление, ограничивающее ток якоря. Характеристика при этом становится более мягкой (кривая 4 на рис. 2.60). Машина переходит в режим противовключения при отрицательных значениях скорости.
Регулирование напряжения скорости ДПТ СВ так же, как ДПТ ПВ, может осуществляться: 1) изменением подводимого; 2) введением добавочного сопротивления в цепь якоря; 3) изменением последовательной обмотки возбуждения.Кроме того, для ДПТ появляется дополнительная возможность регулирования скорости независимой обмотки возбуждения.
Из рассмотренного следует, что ДПТ СВ имеют характеристики весьма удобные для тягового электропривода. По сравнению с ДПТ ПВ машины со смешанным возбуждением позволяет обеспечить генераторное торможение и регулирование потока скорости обмотки независимого возбуждения.
Регулировка скорости двигателей постоянного тока
Потенциометрический способ регулирования скорости двигателя постоянным током изменением сопротивлений, включенных последовательно и последовательно
[ок.146]
Регулировка скорости двигателя постоянного тока при помоши управляемых ионных выпрямителей (тиратронов)
[c.148]
С высоким пусковым моментом, большим числом включений в час и регулирование скорости Двигатели постоянного тока последовательного или смешанного возбуждения, иногда искусственными соединениями обмоток Механизмы подъема и передвижения кранов с большой производительностью и точностью, вспомогательными металлургическими механизмами, электрическая тяга
[ок.239]
Сложные системы регулирования скорости постоянного тока. С и-стема генерато р-д вигатель (Г — Д). Система генератор-двигатель (система Леонарда) — наиболее совершенная система управления и регулирования двигателя постоянного тока. Недостаток ее
[c.517]
Включение сопротивлений в цепи ротора двигателя с контактными кольцами. Диапазон регулирования и недостатки те же, что при регулировании скорости двигателя постоянным током сопротивлений в цепи якоря. [c.136]
РЕГУЛИРОВАНИЕ СКОРОСТИ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
[c.30]
С очень плавным регулированием до отношений 1 4 (вверх от основной скорости) Двигатели постоянного тока параллельного возбуждения с питанием от сети постоянного тока неизменного напряжения Электроприводы главного движения металлорежущих станков (токарных, расточных, карусельных)
[c.126]
Электрический привод бесступенчатого регулирования широко применяемых в тяжелых и шлифовальных станках.Для увеличения диапазона регулирования комбинируют двигатель постоянного тока с несложной коробкой скоростей.
[c.25]
Применение электронной схемы регулирования частоты вращения двигателя постоянного тока на тиристорах в данной установке дает возможность плавно изменить скорость перемещения подвижного захвата на 7 порядков 1,67 до 3,3 10-мм / с. Обеспечивается плавная регулировка скорости перемещения подвижного захвата в широких пределах при сохранении номинального крутящего момента на валу двигателя, т.е. растягивающего усилия, ожидаемого на
[c.84]
В случае необходимости с помощью данного механизма можно осуществить регулирование скорости опускания груза. При пологой характеристике оборотов двигателя, работающего на спуске груза, близко к его оборотов на холостом ходу. Это позволяет изменять скорость опускания путем изменения числа оборотов холостого хода переключения числа полюсов трехфазных электродвигателей или изменением магнитного поля двигателей постоянного тока.Весьма точное регулирование скорости спуска может быть даже при трехфазном двигателе введено в систему рычагов дополнительной пружины 1, имеющей предварительное натяжение (фиг. 213, а). При наличии такого пружины корпус вспомогательного двигателя при повороте под действием реактивного момента прежде, чем он разомкнет тормоз, должен преодолеть усилие пружины 1. В зависимости от данного момента ступени сопротивления двигатель работает на одной из искусственных характеристик а— [c.326]
Выше рассмотрен простейший случай системы автоматического регулирования скорости с двигателем постоянного тока независимого возбуждения. В качестве примера для определения
[c.15]
Анализ показывает, что динамическая характеристика двигателя постоянного тока в замкнутой системе автоматического регулирования скорости с линейными и кусочно-линейными звеньями может быть представлена в виде (2.24). Иси используется выражение для относительной скорости 5 = 1 —оз / мо, уравнение динамической характеристики (2.24) можно преобразовать следующим образом
[c.24]
На рис. 0. 1, (Показаны характеристики двигателя постоянного тока с независимым возбуждением. Скорость регулируемого изменения возбуждения генератора, питающего цепь якоря двигателя. Эта система, названная система Г — Д (генератор— двигатель), допускает очень тонкое регулирование скорости и находит наибольшее применение там, где, с одной стороны, устанавливают двигатели очень большой мощности, а с другой — предъявляют особые требования в отношении плавного изменения скорости вращения.Мощность двигателей системы Г — Д на крупных шахтных подъемных установках достигает 4 000 кет. В то же время на современных металлорежущих станках, где устанавливают двигатели сравнительно малой мощности, в некоторых случаях применяют систему Г — Д.
[c.18]
Этими свойствами двигателей постоянного тока, имеющими диапазон регулирования угловой скорости и высокий КПД.
[c.425]
Регулировка скорости тяговых двигателей постоянного тока
[ок.447]
Для регулирования скорости пригодны те же методы, что и для двигателей постоянного тока (см. Стр. 447). Однако наличие трансформатора понижающего напряжения контактной сети, позволяет в широких пределах и экономично регулировать напряжение на зажимах двигателей путём переключения их на различных выводах вторичной обмотки трансформатора. В связи с этим перегруппировки двигателей и ослабление поля для регулирования скорости не применяются.
[c.454]
Ионный электропривод постоянного тока и его механические характеристики.Электропривод этого типа состоит из ионных выпрямляющих аппаратов и постоянного тока двигателя. Для выпрямления переменного тока при больших мощностях двигателей используются ртутные выпрямители с регулируемой сеткой, при меньших мощностях — тиратроны (стеклянные или металлические) и игнитроны. Подводимое к двигателю напряжение ионных аппаратов можно регулировать в широких пределах, изменяя момент зажигания игнитронов посредством соответствующих потенциалов на сетки ртутных выпрямителей или тиратронов.Этим создаётся возможность пуск и широко регулировать скорость так же, как и в системе Леонарда. Пределы регулирования скорости двигателя — от 1 20 и выше.
[c.13]
Регулирующие р еос тэты для длительного регулирования скорости двигателя изменением сопротивления в цепи якоря двигателей постоянного тока и в цепи ротора асинхронных двигателей.
[c.49]
Шунтовые регулировочные реостаты используются для длительного регулирования скорости шунтового двигателя постоянного тока изменением тока возбуждения. [c.49]
Виды управления автоматизированным приводом. Исходные импульссы в схеме автоматизированного привода в основном или кнопками (кнопками управления), или рычагами — командоконтроллерами (рычажное управление). Иногда исходный импульс для пуска или остановки двигателя создаётся замыкание контактов того или другого реле — поплавкового, реле давления и т. п. Пуск, остановка и торможение при кнопочном и рычажном управлении всегда выполняется автоматически.Однако и в автоматизированной схеме иногда ряд процессов может производиться вручную, например, часто скорость в схеме автоматизированного шунтового двигателя постоянного тока выполняется ручным перемещением ручки реостата. Полное разграничение автоматических и полуавтоматических схем сделать нельзя.
[c.62]
Плавное регулирование скоростей осуществляется либо механическим путём при помощи вариатора, либо электрическим путём за счёт изменения числа оборотов двигателя постоянного тока. [c.234]
Для механизмов с длительной работой, не требующих регулирования скорости, асинхронные, чаще всего коротко-замкнутые двигатели 380 в напряжения, при необходимости же в регулировании скорости применяют шунтовые двигатели постоянного тока. Двигатели для вспомогательных механизмов выбираются закрытыми. Двигатели постоянного тока вспомогательных механизмов выполняют постоянный ток от двигателя генератора или от ртутных выпрямителей.
[c.1059]
Привод летучих ножниц, режущих полос на куски при одновременной прокатке их, осуществляется шунтовым двигателем постоянного тока с регулированием скорости в цепи обмотки возбуждения в пределах 1 3-ь-1 4.При необходимости в более широкой регулировке скорости система Леонарда. Поддержание скорости ножей в соответствии со скоростью полосы в клети стана обеспечивает достижение регуляторов скорости, изменяющих скорость ножниц соответственно скорости металла приводом ножниц от стана через механическую связь приводом ножниц от двигателя, получающего питание от генератора, который вращается двигателем клети стана (генератор и двигатель могут быть выбраны как постоянного тока, так и синхронные) синхронизацией скоростей ножниц
[ок.1067]
Для привода холодной прокатки применяют двигатели постоянного тока и асинхронные двигатели. Для небольшой производительности с узким диаметром прокатываемых полос, не требующих точной установки натяжения полосы, могут быть применены асинхронные двигатели. Для увеличения производительности применяют шун-товые двигатели постоянного тока, которые обеспечивают возможность использования широкополосного натяжения хорошего электрического путём возможность получения небольшой скорости полосы при заправке и т.д. Шунтовой двигатель с регулированием скорости путём изменения потока возбуждения соответствует условиям работы становой холодной прокатки, у которых более узкие полосы, требующие небольшого момента, обычно прокатываются с большой скоростью.
[c.1068]
Регулировка скорости шунтового двигателя постоянного тока может производиться изменением а) возбуждения, б) подводного напряжения, в) сопротивления якорной цепи.
[c.143]
Шунтовые двигатели постоянного тока значительно сложнее, дороже и тяжелее асинхронных (короткозамкнутых) их целесообразно применять в тех случаях, когда требуется широкое и плавное регулирование скорости. [c.143]
Шунтовое регулирование двигателей постоянного тока изменением тока и возбуждения. Регулирование производится вверх от основной скорости при постоянной номинальной мощности
[c.146]
Электрические двигатели постоянного тока по мере их распространения в различных отраслях промышленности приобрели репутацию универсального и безотказного источника механической энергии. Электропривод обеспечивал простоту и быстроту пуска, возможность регулирования скорости вращения, компактность и легкость, приспособляемость к любому производственному процессу при меньших эксплуатационных расходах на единицу продукции по сравнению с паровым приводом.Однако ограниченные возможности передачи электроэнергии на постоянным током не обеспечивают широких возможностей электрификации.
[c.62]
Другая техническая проблема при настройке силовых процессов заключалась в рациональном выборе системы токов постоянного или переменного трехфазного. Двигатели постоянного тока удерживают первенство там, где требовалось удобное регулирование скорости в широких пределах, а также при частом реверсировании. [c.71]
Таким образом, изложенное выше представляет описание практической реализации транзисторного преобразователя с микропроцессорным управлением, предназначенного для регулирования скорости двигателя постоянного тока с независимым возбуждением. На основе измеренных параметров системы преобразователя — двигатель (ток ротора, ток возбуждения, противоЭДС, входное напряжение преобразователя) с помощью 16-битового микропроцессора формируется такой алгоритм управления, который позволяет добиться таких же тяговых характеристик, как в двигателях с последовательным возбуждением. [c.33]
Электроприводы постоянного тока системы УВ — Д. Электроприводы с тиристорными преобразователями (ТП) постоянного тока применяются для мощных крановых механизмов. При числе включений не более 300 в час используются нереверсивные ТП серии АТК [9] с контактными реверсорами в главной цепи двигателя (рис. П.1.29). Реверсивные ТП серии АТРК (табл. П.1.28) применяются для регулирования угловой скорости двигателя постоянного тока независимого возбуждения от сети переменного тока 380 В значение 50 Ft и регулируют диапазон регулирования ниже основной скорости 1 8, ё выше до 2 1.Для приводов мощностью свыше 250 кВт выбираются два парая-
[c.276]
В данной машине (рис. 17) приведенная гидравлическая схема передачи усилия от рабочего кулачка 4 через ролик 3 и плунжер 2 на шток исполнительного механизма. Испытания на сжатие нагрузки в нпжней части рабочей клети в массивном контейнере, на растяжение — в высокотемпературной печи, смонтированной между колоннами в верхней части рабочей клети. Регулирование скорости деформации проводится за счет изменения скорости вращения двигателя постоянного тока и смены передаточного отношения редуктора. [c.44]
Рассмотренные выше системы с управляемыми двигателями постоянного тока являются разомкнутыми. В таких системах изменение регулируемой величины (скорости вращения двигателя) действует только внутренними инструментами, чего требует точхшсть регулирования. В автоматизированных современных приводах электродвигателей постоянного тока используются замкнутые системы с устройствами, обеспечивающими коррекцию регулируемых величин при изменении возмущающих воздействий [19, 103, 104]. [c.23]
| Рис. 6,61. Двухмоторный привод с электро.магпптной муфтой. При включении привода на рабочую скорость движение передается от двигателя постоянного тока через червячную передачу 5 и далее на вал 6 при включенном правом электромагните 4. Для передачи валу 6 движения с другой скоростью запуск соединенный с валом I двигатель трехфазного тока и подключается левый электромагнит 2, диск 3 притягивается к левому полумуфте, а муфта 4 выключается. Муфта допускает дистанционное управление и электрическое регулирование рабочей скорости. |
Электрическое тор.можение сравнительно редко. Реостатное торможение происходит в режиме постоянного тока при самовозбуждении (сериесным двигателем постоянного тока), а также в ре-жи.ме переменного тока при независи.мом возбуждении от трансформатора. В последнем случае для регулирования скорости используются те же ступени трансформатора и та же аппаратура, что и при моторном режиме [4]. [c.455]
Сравнение видов электрического торможения. Рекуперативное торможение можно применять в шунтовых двигателях постоянного тока с регулированием скорости током возбуждения и в короткозамкнутых асинхронных двигателях с переключением полюсов. Выбор между противовключением и динамическим торможением зависит от требуемой скорости торможения и скорости остановки при одинаковых исходных сигналах в якоре торможение противовключением более эффективно, так как тормозной момент при противо-включении меняется мало, а при динамическом торможении спадает до нуля.Динамическое торможение практически точным. Для реверсивных приводов чаще применяют противовключение, для нереверсивных— динамическое, так как последняя схема проще.
[c.8]
Выбор рода тока для электроприводов. На районных электрических станциях энергия генерируется в форме переменного тока и на промышленные предприятия подаётся трёхфазный ток. Поэтому во всех случаях, когда применение двигателей постоянного тока не вызывается производственной необходимостью, следует установить электродвигатели трёхфазного тока.Потребность в двигателех постоянного тока может возникнуть I) при широком плавном регулировании скорости, 2) при большом пуске в час и вообще при напряжённом повторно-кратковременном режиме 3) при работе электроприводов по специальному графику скорости, пути 4) при необходимости в особой плавности пуска и торможения, перехода от одного рабочего процесса к другому 5) при необходимости кроме основных, рабочих, получить и заправочные механизмы скорости. Краткое сопоставление различных типов двигателей в отношении регулирования скорости дано в табл.4, из которой видно, что во всех тех случаях требуется плавное регулирование скорости в пределах 1 3 и выше, наиболее целесообразно использовать двигатели постоянного тока системы Леонарда, а в малых мощностях электронноионный привод. Последний в эксплоатационном отношении достаточно не изучен. При ступенчатом регулировании до 1 4 предпочтительными при малых мощностях (особенно в металлорежущих станциях) могут быть использованы короткозамкнутые асинхронные двигатели с переключением полюсов. Коллекторные двигатели переменного тока в указанных пределах экономичны в основном при установке
[ок.20]
Двигатели постоянного тока, питающие от постоянного напряжения а) шунтовые б) сериесные в) шунтовые б) сериесные в) а )аундные До 1 3 я даже до 1 4 с получением заправочных и ползучих скоростей Плавный типее плавный — в сериес-ных двигателях Практически ограничения регулирование в сериесных двигателях. Получение очень низких скоростей сопряжено с потерями. Подходят для повторнократковременного режима
[c.21]
Основным методом расчета двигателя по нагреву является метод эквивалентного тока.Если при всех условиях работы данной графики мощность или момент используются методы току, могут быть использованы также методы эквивалентной мощности или момента.