8 Регулирование скорости дпт нв и пв. Регулирование скорости дпт
8 Регулирование скорости дпт нв и пв.
Двигатель постоянного тока с независимым возбуждением (ДПТ НВ)
ДПТ НВ работает при Ф=const.
Уравнение электромеханической характеристики. .
В установившемся режиме diя/dt=dM/dt=0.Ур-я статических характеристик:
Хар-ки двигателя, при отсутствии в якорной цепи добав. сопротивления при Uя =const и ф=const, являются естественными
При изменении параметров двигателя, сети, или при использовании специальных схем включения характеристики двигателя будут искусственными.
при изменении сопротивления в якорной цепи ↓ жесткость характеристик . Семейство мех.характеристик, соответствующих различным значениямRдоб, изображено на рис., причемRд3>Rд2>Rд1. В частном случае приU=0 когда якорь замкнут на некоторое сопротивление, все хар-ки пересекаются в начале координат Из графиков видно, что ↑ сопротивления вызывает ↓ скорости дв-ля, т.к при этом ↑ падение напряжения на якоре, ↓ ток, следовательно и ↓ момент двигателя.
При изменении U, подводимого к якорю двигателя, изменяется0. Жесткость характеристик неизменна. Чтобы менять подводимоеU,необходимо питать двигатель от источника регулируемого напряжения
Иногда необходимо ↑ рабочую скорость сверх основной. При U=constослабляем магнитный поток дв-ля. ↓Ф вызывает ↑0, т.к., но ↓жесткость хар-к. В => будет ↑ падение скорости при одном и том же значении Мс.
При пуске двигателя в ход(=0),iя не зависит от Ф, а зависит отUиRЯ:.
Характеристики для Ф пересекаются в 1 точке на оси абсцисс. Механические хар-ки,точки пересечения характеристик не совпадают. При нагрузках, слева от точек пересечения, ωдв ↑, а при нагрузках справа–ωдв ↓. Это явление - опрокидывание регулирования.
ДПТ ПВ (последовательного возбуждения)
У ДПТ ПВ обмотка возбуждения включена последовательно с обмоткой якоря и его поток Ф =f(iя) зависит от нагрузки машины. Уравнение электромеханической характеристики:
При изменении U на зажимах дв-ля хар-ки перемещаются вниз или вверх по отношению к естественной. При ↑ сопротивления якорной цепи ωдв↓ и характеристики смещаются вниз. Жесткость характеристик ↓. Из графиков видно, что ω↓ при увеличении нагрузки. Характеристики являются мягкими. Поэтому ДПВ непригодны для ЭПов, требующих постоянства скорости при меняющейся нагрузке.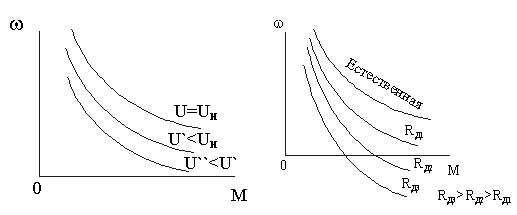
9 Система генератор – двигатель (г–д).
Принципиальная схема системы Г-Д. В системе ГД в кач-ве управляемого преобр-ля используется генератор пост.тока независимого возбуждения, приводимый во вращение АД или СД. В кач-ве приводного двигателя рабочей машины используется ДНВ.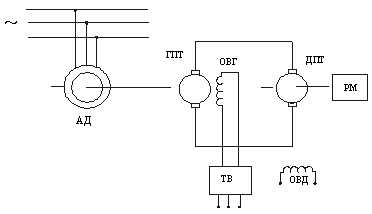
Пуск осуществляется включением сетевого (гонного) Д, вращающего Г. Приводной Д перед этим должен быть полностью возбужден, т.е. его магнитный поток должен быть номинальным. Напряжение на ОВ ГПТ д/б =0. При подаче напряжения на ОВ Г и его ↑, он будет развивать ЭДС, появится напряжение на якоре ДПТ и последний будет разгоняться.
Питание ОВ ГПТ в современных системах ГД, осуществляется от тиристорного или транзисторного ТВ. Основным. видом ТВ является ТП с раздельным упр-ем комплектами вентилей.. Зависимость вых. напряжения упр-ияUУна рис. Ее раб. участок можно считать линейным
Семейство мех. хар-к Д в системе ГД, соответствующее различным значениям ЭДС генератора при СД, на рис.
Жесткость основной хар-кидв-ля ~ в 2 раза меньше, чем при питании его от сети с U=const, вследствие того, что в як. цепи кроме сопротивления якоря Д имеется еще и сопротивление якоря ген-ра, а они ~ одинаковы. Но скорость идеального ХХ Д в разомкнутой системе ГД больше, чем при питании Д от сети с U=const, т.к. номин. ЭДС генератора, определяющая w0 Д, больше, чем номин. напряжение Д, определяющее w0 при питании его от сети. Хар-ка двигателя при питании его от сети с U=UHизображена пунктиром.
Режимы работы, торможение, расчет характеристик, основные показатели. Изменяя поток возбуждения (его ЭДС) можно осущ-ть непрерывное плавное упр-ие моментом и скоростью ЭПа во всех 4-х квадрантах коорд. системы при b=const. На рис. показано в 1-м квадранте семейство хар-к при ЕГ=var.
Режимы.Двигательный режимзаштрих. обл-ть в 1 и 3 квадрантах. Динам.торможение - одна хар-ка, проход. через начало координат. Режим противовключения - область между осью моментов и характеристикой динамического торможения во 2 и 4 квадрантах.
Генераторный режим с рекуперацией энергии в сеть -область во 2 и 4 квадрантах, заключенная между осью скоростей и хар-кой динамического торможения.
Торможение с отдачей энергии в сеть. ↓ или снимаем возб-ие генератора, ЭДС дв-ля станет больше ЭДС генератора. Д превратится в генератор.
Ток в якорной цепи изменит направление на противоположное. Генератор превратится в Д, работающий с ослабленным магнитным потоком. Скорость его ↑ и он будет раскручивать гонный Д со сверхсинхронной скоростью. Гонный Д превращается в генератор. Он будет отдавать в сеть акт.энергию, потребляя из сети реакт. энергию.
Достоинства системы ГД:
1.Отсутствуют громоздкие пусковые реостаты и потери в них. Недостатки системы ГД:
1.Высокая установленная мощность, превышающая в 3 раза мощность приводного дв-ля.
2.Сравнительно низкий КПД, равный .
studfiles.net
3.8. Регулирование скорости дпт независимого возбуждения в схеме с шунтированием якоря
Для регулирования скорости ДПТ независимого возбуждения применяется схема с шунтированием якоря, показанная на рис. 3.30. Эта схема позволяет с помощью двух добавочных резисторов–Rш,включаемого параллельно якорю, иRп,включаемого последовательно с якорем, получать
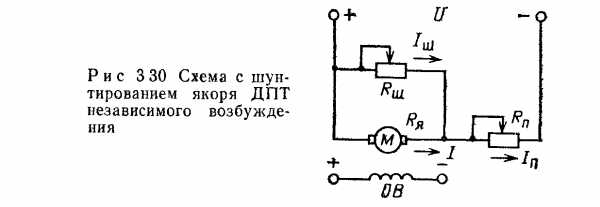
сравнительно жесткие характеристики в области малых скоростей ДПТ. Такие характеристики требуются, например, для электроприводов подъемных кранов и лифтов.
Уравнения характеристик ДПТ в схеме рис. 3.30 могут быть получены на основании выражений для ЭДС (3.2) и момента (3.3) ДПТ и следующих соотношений:
(3.57)
(3.58)
(3.59)
Заменяя в (3.57) и (3.58) ток Iпна его выражение из (3.59), а затем исключая из полученных двух уравненийIш, получаем следующие выражения соответственно для электромеханической и механической характеристик:
(3.60)
(3.61)
где
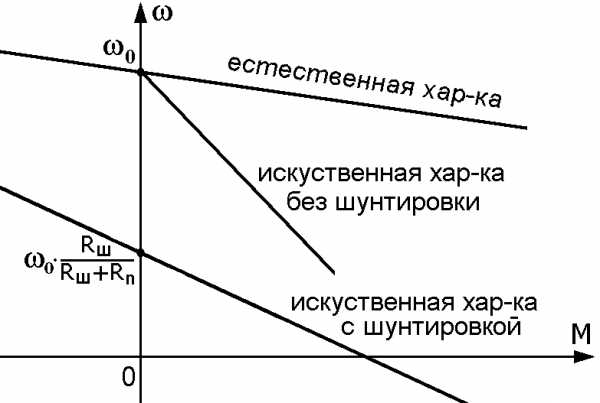
Из (3.60) и (3.61) видно, что в схеме с шунтированием якоря снижается скорость идеального холостого хода и падает жесткость характеристик по сравнению с основной схемой включения ДПТ. Это объясняется тем, что в схеме рис 3.30 напряжение ДПТ меньше напряжения источника питания, а в якорной цепи находится добавочный резистор Rп. По этой причине способ регулирования скорости в схеме с шунтированием якоря часто называют комбинированным, так как он сочетает в себе регулирование изменением напряжения и реостатное регулирование.
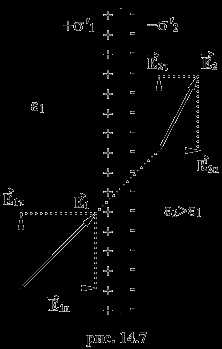
Семейство искусственных характеристик ДПТ в схеме рис. 3.30 при постоянном Rши регулируемомRпприведено на рис. 3.31.
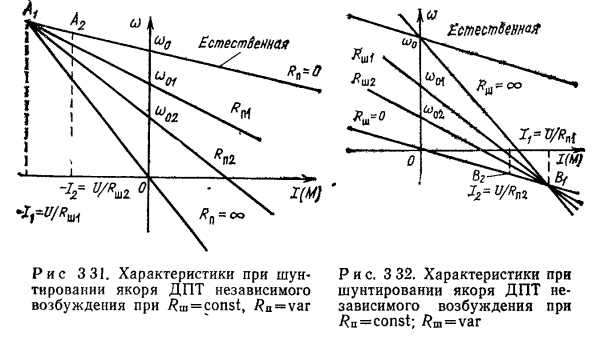
Общая для данного RшточкаA1пересечения всех характеристик соответствует режиму работы ДПТ, когда он не потребляет ток из сети, в силу чего резисторRпне оказывает влияния на характеристики ДПТ. В этой точке ЭДС ДПТ уравновешивает напряжение сети и внутреннее падение напряжения в якоре, т. е.
Двигатель работает в режиме динамического торможения с током I1=U/Rш1. При измененииRш,например при его увеличении, общей точкой становится точкаA2, также располагающаяся на естественной характеристике.
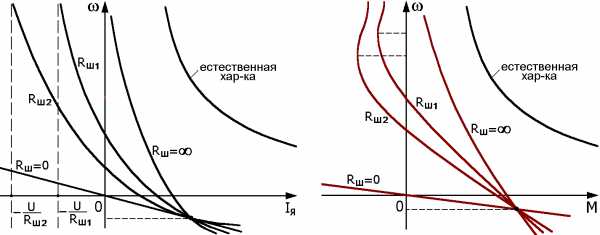
Семейство искусственных характеристик ДПТ при постоянном Rпи регулируемомRшприведено на рис. 3.32. Пересечение характеристик происходит в точкеВ1,которая является общей точкой для всех искусственных характеристик при данномRп.В точкеB1ЭДС ДПТ, изменив свой знак, компенсирует внутреннее падение напряжения в якоре, вследствие чего напряжение на якоре и, следовательно, наRшравно нулю, ток через резисторRш.не проходит, а ток через якорь определяется какI1=U/Rп1.При измененииRп,например при его увеличении, общей точкой характеристик становится точкаВ2,координата тока для которой определяется соотношениемI2=U/Rп2.
Рассмотренный способ регулирования скорости по своим характеристикам и показателям занимает промежуточное положение между способами, связанными с изменением напряжения на якоре и сопротивлением в цепи якоря. Диапазон регулирования скорости лежит в пределах 5 – 6, плавность регулирования определяется плавностью изменения сопротивления RшиRп. Регулирование скорости осуществляется вниз от основной при постоянном моменте нагрузки, жесткость получаемых искусственных характеристик относительно высокая в области малых скоростей.
Экономичность этого способа регулирования невысока из-за значительных потерь мощности в якорной цепи. По этой причине способ используется для регулирования скорости ДПТ небольшой мощности при кратковременной работе на пониженных скоростях.
studfiles.net
8.Регулирование скорости дпт нв и пв.
Рег-ние скорости ДПТ независимого возбуждения шунтированием якоря
Введение добавочного сопр-ния в цепь якоря ДНВ позволяет снизить его скорость. При этом мех-кие хар-ки становятся мягкими. В ряде случаев, особенно для обеспечения точной остановки рабочего механизма, необходимо предварительное снижение скорости электропривода и работа на хар-ке с малой крутизной. При невысоких требованиях к точности и плавности рег-ния этого можно достичь шунт-нием якоря. Рег-ние скорости двигателя в схемах с шунт-нием осущ-ется с помощью делителей напряжения – потенциометров. При таком включении двигателя используются как бы одновременно два способа регулирования скорости – изменением подводимого к якорю напряжения и реостатное. В случае двигателей небольшой мощности потенциометр может быть выполнен в виде реостата со скользящими контактами, путем перемещения которого напряжение на якоре двигателя можно изменять от 0 до U=UН.Уравнение механической характеристики двигателя при данном способе регулирования можно получить, если воспользоваться уравнениями равновесия ЭДС и токов. Уравнение механической хар-ки
.
Крутизна этой характеристики больше естественной, но меньше искусственной с тем же Rп, но без шунтирования.
У
Для выявления влияния величин Rш и Rп на вид хар-к, одно из этих сопр-ний будем полагать неизмененным, а другое изменять от 0 до и наоборот. При изменении Rш от 0 до бесконечности и Rп = const 0 изменяется от 0ном до 0. При Rш = 0  . Это выр-ние представляет собой электромех-кую хар-ку динамического торможения при замыкании якоря накоротко.
. Это выр-ние представляет собой электромех-кую хар-ку динамического торможения при замыкании якоря накоротко.
При Rш = и Rп = const . Это уравнение электромех-кой характеристики в нормальной схеме включения с добавочным сопротивлением Rп в цепи якоря.
В
ур-ние электромех-кой хар-ки (Rп=0 и Rш=const )
(Rп=0 и Rш=const )
При Rп= и Rш=const Д можно рассматривать как отключенный от сети и работающий в режиме динам-кого торможения на сопр-ние Rш. Ур-ние хар-ки, на которой он работает
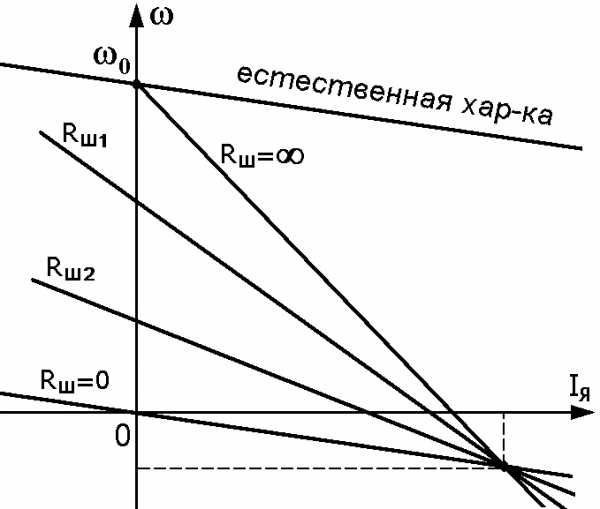
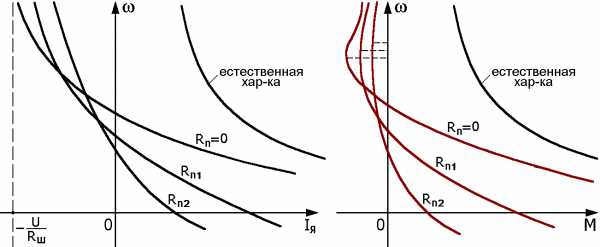
При изменении Rп от 0 до все возможные хар-ки будут лежать внутри угла, образованного естественной хар-кой при Rп=0 и хар-кой, соответствующей Rп= (см. график).
Плавность рег-ния при небольшой мощности Д, позволяющей использовать ползунковый реостат, достаточно высокая. Однако, с возрастанием мощности Д эта возм-сть исключается и рег-ние приходится осуществлять переключением ступеней регулировочных сопр-ний Rш и Rп с помощью силовой коммутационной аппаратуры. Т.к. при рег-нии этим способом поток Ф Д остается постоянным (Ф=Фн), допустимая нагрузка без учета изменения условий охлаждения постоянна и равна М=Мдоп=Мн=const.
КПД в схеме с шунтированием меньше, чем просто при реостатном рег-нии, т.к. ток, потребляемый из сети этом случае больше на величину тока в шунтирующем сопр-нии, а значит, больше и потребляемая из сети мощность.Это обстоятельство ограничивает применение данной схемы двигателями малой мощности (реже средней) при кратковременном снижении скорости. Диапазон регулирования не превышает (45):1.
Рег-ние скорости ДПТ посл-ного возб-ния при посл-тельно-парал-ном включении
Подобный способ регулирования осуществим в том случае, если производственный механизм приводится в движение одновременно несколькими (обычно двумя) двигателями. Применение двух двигателей половинной мощности вместо одного возможного или из-за необходимости уменьшения момента инерции, или по условиям большей надежности работы, или по условиям удобства размещения двух двигателей меньших габаритов вместо одного большого. Такой привод находит применение для мощных разливочных кранов, в транспортных устройствах, в доменных подъемниках, мощных ножницах для резки металла и ряде других механизмов. В таких механизмах два двигателя одинаковой мощности работают на один общий вал.
П
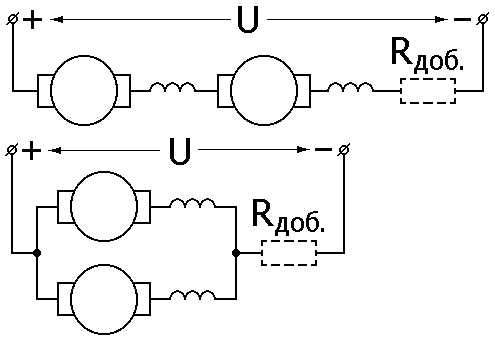
Таким образом получается две ступени регулирования без добавочной бесполезной траты энергии. При снижении скорости вдвое роль добавочного сопротивления играет второй двигатель, полезно использующий энергию. Для получения промежуточных ступеней регулирования, в цепь якорей может быть введено добавочное сопротивление, как показано на схемах пунктиром. В целях полного использования двигателей регулирование может производиться при Мс = const (без учета ухудшения условий охлаждения).
Рег-ние скорости ДПТ последовательного возбуждения в схемах с шунтированием
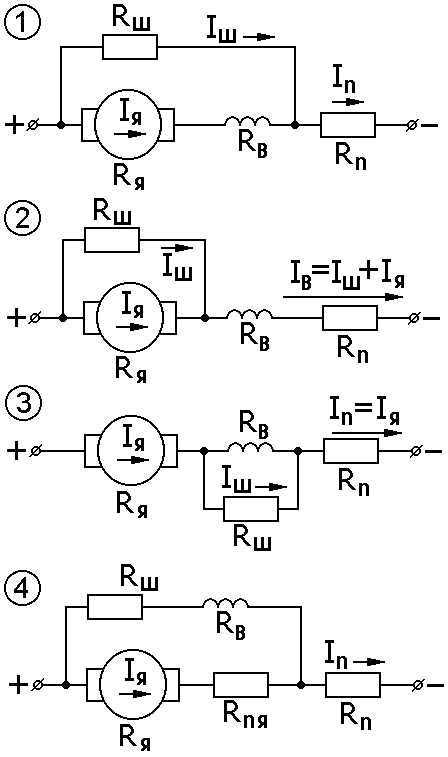
Для маломощных ДПВ может использоваться как и для ДНВ потенциометрическая схема рег-ния напряжения, приложенного к силовой цепи Д, позволяющая рег-вать его скорость. Возможны четыре основных варианта схем с шунтированием обмоток двигателя:
Схема с шунтированием двигателя.
Схема с шунтированием якоря.
Схема с шунтированием обмотки возбуждения.
Схема с параллельным включением обмотки якоря и обмотки возбуждения.
Во всех этих схемах в неразветвленной части обязательно должно быть последовательно включенное сопротивление Rп.
Снижение угловой скорости в схеме 1 вызывается падением напряжения на сопротивлении Rп, в результате чего на двигателе напряжение меньше, чем подводимое из сети напряжение. Энергетические показатели этой схемы хуже чем обычной схемы с последовательным сопротивлением в цепи якоря. Поэтому она не находит широкого применения.
Н
Скорость двигателя регулируется обычно ступенчато вниз от основной в широких пределах, которые зависят от соотношения сопротивлений Rш и Rп, от насыщения машины и нагрева обмотки возбуждения.
С уменьшением Iя ток возбуждения Iв тоже уменьшается, а растет. При = 0 ЭДС якоря станет равной падению напряжения в сопротивлении Rш, создаваемому током, протекающим по этому сопротивлению, обмотке возбуждения и Rп. Это будет режим идеального холостого хода. При > 0 двигатель переходит в генераторный режим и совместно с сетью начинает питать шунтирующий контур (Rя и Rш), отчего ток в нем увеличивается. Поступающая с вала механическая энергия преобразуется в электрическую и совместно с энергией, потребляемой из сети, теряется в сопротивлениях Rя и Rш. Увеличение тока в контуре Rя - Rш увеличивает падение напряжения на Rш, что приводит к уменьшению потока Ф, т.к. будет уменьшаться ток Iв, т.е. ток, потребляемый из сети. При
 Iв0, следовательно, Ф 0 и .
Iв0, следовательно, Ф 0 и .
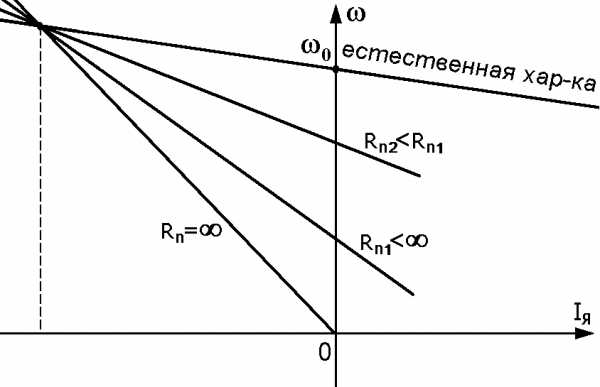
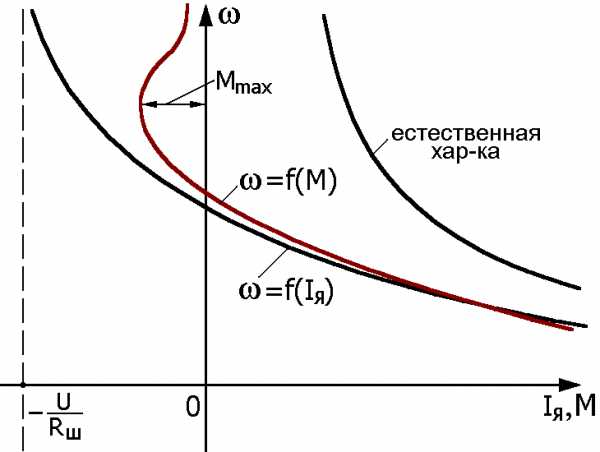
В связи с этим электромех-кая хар-ка двигателя =f(Iя) асимптотически приближается к линии, параллельной оси ординат и соответствующей току  (см. график.)
(см. график.)
Т
Семейства электромеханических и механических характеристик для случая Rш= const и Rп= var выглядят так, как изображено на следующих рисунках.
В
Семейство характеристик при Rп= const и Rш= var представлено на следующих рисунках.
П
Уменьшение величины Rш сдвигает характеристики влево и вниз. Максимальный тормозной момент (у механических характеристик) в тормозном режиме увеличивается и уменьшается скорость, при которой М достигает максимума.
Рег-ние скорости ДПВ шунтир-нием якоря не экон-чно. Потери мощности и значение КПД в этой схеме такие же, как и в случае шунт-ния якоря ДНВ. Поэтому эта схема применима для рег-ния при отн-но непродол-ной работе в зоне низких скоростей.
Поскольку в этой схеме в двигательном режиме IвIя, в качестве критерия допустимой нагрузки при постоянной теплоотдаче приходится принимать номинальный ток обмотки возбуждения, т.е. Iдоп=Iвн=Iн, что обеспечивает регулирование при Ф=Фн, но требует по мере снижения уменьшения момента МдопМн таким образом, чтобы выполнялось условие Iя.доп =Iн - Iш.
Регулирование скорости ДНВ изменением магнитного потока
Этот способ рег-ния применим для всех ДПТ, но наибольшее применение он получил для ДНВ. Он является одним из наиболее простых и экономичных способов, т.к. мощность, потребляемая обмоткой возбуждения, составляет (23)% от мощности Д. Поэтому этот способ широко используется в разомкнутых системах ЭП, получающих питание от сети пост. тока с U= const, в замкнутых системах ГД и ТП-Д с двухзонным рег-нием скорости, а также в системах ИТ-Д, замкнутых по цепи возбуждения Д отрицательной обратной связью по скорости.
Т
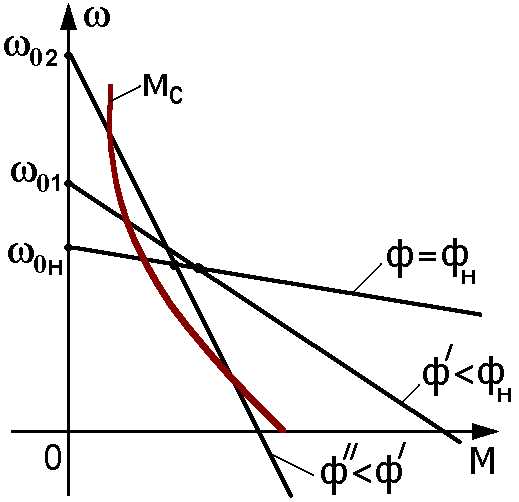
Статические механические хар-ки Д при рег-нии потока изображены на следующем рис.
Точки пересечения хар-тик, соотв-щих ослабленному потоку с естественной хар-кой по мере уменьшения Ф перемещаются в сторону меньших моментов (нагрузок). При реальных пределах ослабления Ф и при нагрузках, не превышающих существенно номинальную, скорость Д при ослаблении Ф увеличивается.
Большинство ДНВ допускает увеличение за счет ослабления Ф не больше, чем на (1020)% сверх 0. Д, специально сконструированные для широкого рег-ния скорости, т.е. рассчитанные на глубокие ослабления Ф,позволяют повысить скорость в 3 – 5, а в ряде случаев и в 8 – 10 раз сверх 0 при номинальном потоке. Пределы изменения скорости сверху ограничены механической прочностью якоря и условиями коммутации.
Допустимая нагрузка на валу двигателя найдется из условия, согласно которому ток Iя при рег-нии остается постоянным и равным Iн, т.е.
,
где РЭМ.Н – номинальная электромагнитная мощность двигателя.
Допустимая мощность на валу двигателя
Рдоп=Мдоп· =РЭМ.НОМ = const.
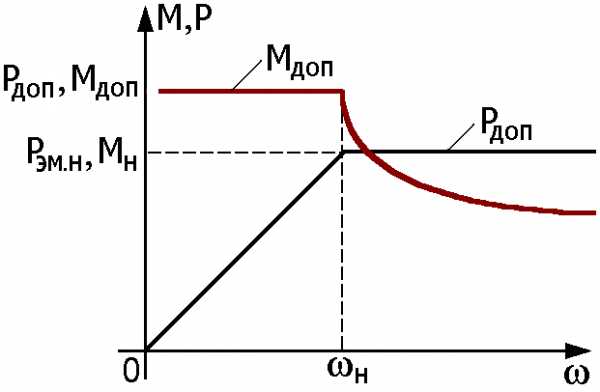
Таким образом, при данном способе рег-ния скорости допустимый момент Д изменяется по гиперболическому закону, а допустимая мощность остается постоянной. Поэтому рег-ние скорости ДНВ ослаблением потока для полного использования Д по нагреву должно осуществляться при постоянной мощности нагрузки.
На приведенном ниже рисунке изображены зависимости Мдоп=f() и Pдоп=f() в диапазоне изменения скорости ДНВ, обеспечиваемом реостатным рег-нием, регулированием подводимого к якорю и регулированием ослаблением Ф.
П
Полному испол-нию Д при работе с ослабленным потоком отвечают точки, лежащие на гиперболической кривой стат-ого момента Мс (см. предыдущий график). При работе со скоростями, соответствующим нагрузкам левее кривой Мс Д будет перегружен, а правее – напротив, недогружен.
При Мс=const и длительной нагрузке Д нужно выбирать так, чтобы при наибольшей угловой скорости ток в якорной цепи был примерно равен номинальному. При меньших скоростях приходится в этом случае мириться с недогрузкой двигателя, т.к. ток в якоре становится меньше номинального вследствие возрастания потока.
Рег-ние скорости изменением Ф обеспечивает большую плавность. Простота, экономичность данного способа и благоприятные рег-чные хар-ки определяют его широкое применение. Для механизмов, момент сопр-ния которых при рег-нии скорости изменяется так, что мощность остается примерно постоянной, ослабление Ф ДНВ является лучшим способом рег-ния скорости.
studfiles.net






Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






