§89. Синхронный двигатель, принцип действия и устройство синхронного двигателя. Самовращение асинхронного двигателя
«Загоняем» асинхронный двигатель в резонанс
Секретные материалы
 Тема эта очень интересная по ней очень много всяких устройств и она очень противоречива. Познакомившись с работой Мандельштама и Папалекси о параметрическом резонансе, стал глубже вникать в эту проблему. Хотя резонанс последовательный и параллельный мной изучен досконально, так как по образованию электронщик, обнаружил много интересного.Хотя никаких больших тайн в явлении резонанса ранее не замечал, все же все время было ощущение, что что-то не договорено и непонятно.
Тема эта очень интересная по ней очень много всяких устройств и она очень противоречива. Познакомившись с работой Мандельштама и Папалекси о параметрическом резонансе, стал глубже вникать в эту проблему. Хотя резонанс последовательный и параллельный мной изучен досконально, так как по образованию электронщик, обнаружил много интересного.Хотя никаких больших тайн в явлении резонанса ранее не замечал, все же все время было ощущение, что что-то не договорено и непонятно.
Первый вопрос, который все время крутился - система введенная в резонанс, способна отдавать излишек, связанный с добротностью колебательной системы? Вот тут изрядно напаявшись всяких устройств, осенила мысль, все бросить и найти теоретическое нормальное объяснение резонансным явлениям, а если путь верный, то и другим не менее загадочным фактам. Формулировка для резонанса дает понять, на что способен тот или иной принцип резонанса.
Параллельный резонанс, образованный индуктивностью и емкостью это замкнутая система, в которой все параметры фиксированы, и энергия в системе замкнута, попытка прямым путем снять излишки колебательного процесса приведет к затуханию колебаний. Поняв, наконец, это, стал исследовать последовательный - пришел к тому же выводу.
Поговорив с друзьями, опытными электронщиками, посвятившими жизнь электроприводу, услышал от них много интересного.…Как развивался электропривод, в каких годах произошло изменение в направлении конструкции электропривода, и с чем это было связанно. Появилось много моментов подсказки, то есть, до 80-х годов асинхронные двигатели имели массивный ротор, очень большой инерционный момент и беличья клетка была прямой, что, при пуске, придавало жесткость. Где-то в восьмидесятых привод стал, коренным образом, манятся, связанно это с бурным ростом машиностроения, потребовались компактные мощные двигатели с мягкими параметрами пуска и быстрой остановкой. Роторы таких машин стали делать длинными, чтобы уменьшить выбег двигателя после остановки для мягкости характеристики пуска применили скошенную магнитную систему ротора. Это расследование натолкнуло на мысль проверить правильность одной возникшей мысли. Набрав общим счетом 27 асинхронных двигателей, разных годов и параметров принялся их разбирать и пересчитывать число полюсов ротора и статора. А также искать массивный ротор без скоса роторных полюсов. Из 27 двигателей попался только один очень старой конструкции, на нем только удалось рассмотреть, что он 7,5 кВт, обороты путем замера оказались почти 3000об/мин. Сопротивление обмоток 1,3 Ом, число полюсов статора 36, ротора 34 (индуктивность не меряю принципиально - с расчетом резонанс не сходится). Единственный недостаток этого двигателя, все-таки скошенные магнитные полюса ротора. Запускаю двигатель по схеме ротовертера или классической, с фазосдвигающим конденсатором. Рабочую емкость настраиваю в резонанс. Напряжение подбираю рабочим конденсатором до 380 вольт. Останавливаю, от мощного звукового генератора по всем правилам снятия АЧХ, снимаю характеристику, и резонанс приходится на частоту выше 120 герц. Вынимаю ротор частота еще герц на двадцать выше. Если при снятии АЧХ произвести подстройку конденсаторами на 50 герц и включить, то он довольно быстро сгорит. Если запитать через латр, постепенно снижая напряжение, то он будет вращаться даже при 30 вольтах. Но на синусе резонансных обмоток, на вершине синуса, есть прогиб осциллограммы, один в один как у феррорезонансных стабилизаторов. Это убедило меня в том, что резонансные обмотки с рабочим конденсатором не работают на основной частоте, а только настраиваются на гармонику кратную ей. Возникает закономерный вопрос - а что собственно интересного, нового в моем повествовании. А всего то искал условие возникновения параметрического резонанса.
Так какое соотношение искать в асинхронных двигателях? Первое, что удалось понять, что рассматривать в работе двигателя нужно всего две обмотки, которые работают в резонансе. Третья применяется для нагрузок потребителей.
Разгонять можно двигатель любым способом. По достижению им номинальных оборотов, одна обмотка путем переключения должна быть электрически отсоединена.
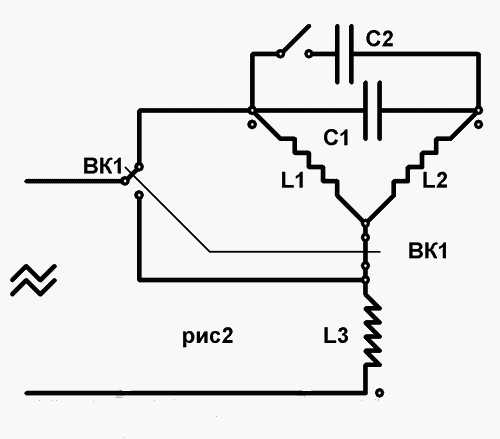
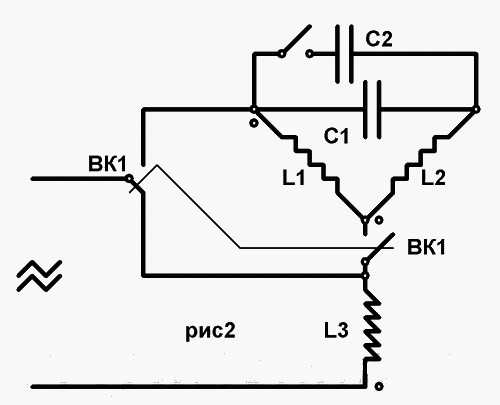
Применял для разгона классическую схему - соединение звездой, две обмотки в резонансе через фазосдвигающую емкость. После достижения оборотов, нужно на ходу быстро перекинуть выводы одной обмотки местами.
Двигатель еще не отсоединен от сети, до переключения обмоток, резонансное напряжение должно быть подобрано не ниже 380 вольт. После перекидки полярности, двигатель не меняя внешне ничего, продолжает также работать, но замер резонанса показывает, что напряжение упало почти до 170 вольт.
Подобрав емкость нужно вернуть первоначальное напряжение, то есть 380 вольт, емкость увеличится, примерно в три-четыре раза. Вот тут и начинается весь фокус - если инерционная масса достаточна, конденсаторы имеют хорошую добротность малую утечку. Надо позаботиться о наличие маховика, возможно, поняв все нюансы, можно от него избавиться, но на начальном этапе лучше перестраховаться, чтоб выбег был с массой несколько десятков минут. В своей конструкций использовал пилораму. Установил на ней отрезные круги большого размера 4-5 штук, стянув их планшайбой. Даже без эффекта крутится очень долго!…
Если обмотка двигателя качественная, обладает хорошей добротностью, правильно выбрано соотношение статорных и роторных полюсов, то двигатель переходит в режим параметрической генерации, на синусоидальной обмотке возникает плоскость, точно такая, как у феррорезонансных стабилизаторов. И можно смело отсоединять от сети, если все параметры двигателя удачны он, как бы чуть на слух ускоряется, и продолжает работать, при этом незначительно греется. Можно потихоньку пробовать нагружать.
Конденсаторы,для резонанса,нужно набирать из небольших - по 2 мкФ. Их несколько суток желательно продержать в тепле, после зарядить от источника вольт на 220 и оставить, на другой день вольтметром с высокоомным входом промерять и выбрать удерживающие максимально большое напряжение. Провода для спайки конденсаторов и подводу к двигателю лучше сделать из самодельного литцендрата. Литцендрат применяю очень давно, когда еще занимался звукотехникой у него очень низкое волновое сопротивление. При передаче импульсных сигналов, повышении добротности колебательных систем, выполняю, не задумываясь, для меня это правило. Но можно и простым медным проводом, но желательно толстым 2,5- 3 мм .
Литцендрат можно набрать из провода марки ПЭЛ – 0,2 жилок 8-12. Все же, самое главное, это сам двигатель мне так и не удалось найти такой, какой именно вытекает из теоретических рассуждений, все современные двигатели имеют косые полюса на роторе маленький диаметр, а нужно большого диаметра ротор и прямые магнитные полюса.
Такие двигатели сданы давно на металлолом. C соотношение, двух роторных полюсов, сдвинутых на сто двадцать градусов, относительно статора, должно выполняться строго.
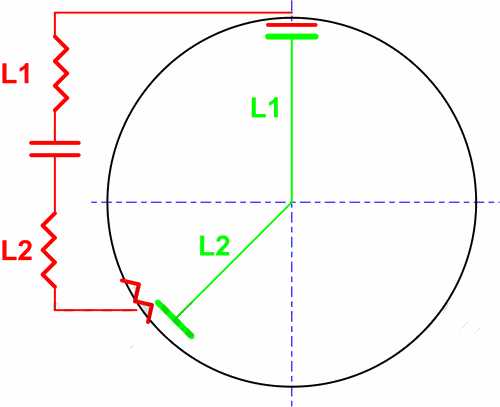
Если верхний полностью совмещен, то левый полюс только собирается входить в статорный полюс. Это обмотки, работающие в резонансе, правая обмотка для нагрузки и ее положение не имеет значения.
Эта схема имеет очень интересные свойства для исследований. Преимущества ее, что она почти в полной мере использует резонанс, питаясь от сети всего через одну обмотку. Две обмотки с резонансной емкостью также вырабатывают магнитный поток, участвующий в работе. Это позволяет снять повышенную механическую мощность. Мной переделаны все станки на этот режим токарный, фрезерный, сверлильный, наждак, циркулярка, все прекрасно работает от однофазной сети. Собираюсь переделать компрессор. Все оборудование как бы работает на полную мощность и ощущение, что от трехфазной сети. В схеме применяются для пуска электролиты в неполярном включении, а рабочая обмотка, настроенная в резонанс с конденсатором типа МБГЧ с допустимым напряжением не менее 600 В.
Автор: неизвестен
Другие материалы по теме: Резонансный усилитель мощности тока промышленной частотыПАРАМЕТРИЧЕСКОЕ ГЕНЕРИРОВАНИЕ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ.Сергей Зацаринин
allpowr.su
Самозапуск двигателей, условия, причины, характеристики асинхронного двигателя

Перевод питания с рабочей линии (трансформатора) на резервную линию (трансформатор) сопровождается кратковременным перерывом питания. За это время частота вращения двигателей уменьшается. Если перерыв продолжителен, то двигатели останавливаются полностью. При восстановлении напряжения по резервной линии двигатели снова запускаются и разворачиваются до рабочей частоты вращения. Этот процесс называют самозапуском двигателей.
Условия самозапуска двигателей значительно отличаются от условий нормального пуска, что обусловлено одновременностью разворота всех двигателей, которые переводятся на резервное питание.
В момент пуска из сети потребляется ток в 4 — 5 и более раз выше номинального значения тока двигателя. Пусковой ток создает дополнительное падение напряжения, например в трансформаторе, от которого питается двигатель. Мощность двигателя, как правило, меньше мощности трансформатора, поэтому дополнительное падение напряжения в трансформаторе составляет незначительную величину. Можно считать, что пуск одного двигателя происходит при номинальном напряжении.
В таком случае асинхронный момент двигателя в 1,5 — 2,0 раза превосходит момент нагрузки и под действием значительного избыточного момента происходит быстрый разворот двигателя (рис. 1.3).
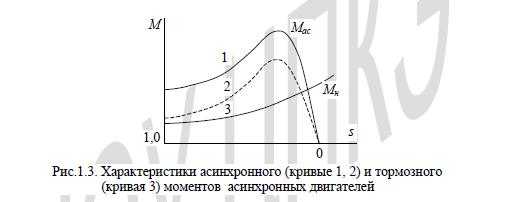
Рис.1.3. Характеристики асинхронного (кривые 1. 2) и тормозного (кривая 3) моментов асинхронных двигателей
При одновременном запуске всех двигателей дополнительное падение напряжения в трансформаторе может быть значительным. Действительно, если предположить, что вся нагрузка на трансформаторе состоит только из двигателей, пусковой ток может в 4 — 5 раз превосходить номинальный ток трансформатора. Реактивный характер периодической составляющей пускового тока приводит к значительном)’ уменьшению модуля напряжения.
При пониженном напряжении асинхронный момент двигателя уменьшается (кривая 2). пуск двигателя затягивается, а в особо тяжелых случаях двигатели могут не запуститься.
Допустимое вр«и запуска электродвигателей для элеклросташган со средними параметрами пара составляет 30 — 35 с [6] и определяется условиями нагрева двигателей. Ятя станций с блоками высокого давления пара допустимое время самозапуска уменьшается до 10 — 15 с и определяется сохранением технологического процесса котлоагрегата из-за прекращения подачи питательной воды. На атомных электростанциях, особенно оборудованных главными циркуляционными насосами с малыми вращающимися массами, допустимое время самозапуска сокращается до 1 — 5 с. При большем времени самозапуска возможно прекращение циркуляции теплоносителя через активную зону реактора с последующим его отключением от аварийной защиты.
Такое резкое сокращение допустимого времени самозапуска на АЭС заставляет снижать все возможные задержки в процессе восстановления резервного питания — применять быстродействующую ретейную защиту, оставлять для самозапуска только ответственных потребителей, иметь запас по мощности у резервного трансформатора и даже учитывать сопротивление кабеля от резервного трансформатора до потребителя.
На рис. 1.4 показаны диаграммы изменения напряжения, тока и частоты вращения двигателей при их переходе на резервное питание. После отключения рабочей линии в момент времени г-, напряжение на двигателях становится равным нулю и начинается их торможение. Длительность снижения частоты вращения зависит от момента сопротивления механизмов, приводимых в движение двигателями. В момент времени t2 включается резервная линия. На двигателях вновь появляется напряжение, и они начинают разворачиваться.
Из рис.1.4 видно, что. несмотря на уменьшение напряжения, вызванного большими пусковыми токами, самозапуск происходит успешно. Если бы включение резервного источника питания происходило раньше, когда торможение двигателей было еще небольшим, то очевидно, процесс самозапуска прошел бы более легко, т.е. пусковые токн были меньше, и следовательно, меньшим было бы и снижение напряжения. Отсюда следует, что с точки зрения самозапуска двигателей переход на резервный источник питания должен происходить как можно быстрее.
Прн быстром включении незаторможенных двигателей включение может быть несинхронным, т.к. у отключенных, но вращающихся двигателей имеется остаточное напряжение. Последующее включение таких двигателей может привести к токам, превышающим пусковые, обусловленные только напряжением источника питания.
Опыт эксплуатации устройств АВР показал, что несинхронные включения двигателей не представляют серьезной опасности. Несмотря на стремление как можно быстрее включить резервный источник питания, восстановление напряжения происходит с некоторой задержкой из-за времени срабатывания элементов автоматики и выключателя. Этой задержки достаточно, чтобы напряжение на заторможенных двигателях снизилось до безопасной величины.
Вследствие большого снижения напряжения в момент перехода на резервное питание двигатели могут не запуститься. В таких случаях часть двигателей должна быть отключена для запуска оставшихся двигателей наиболее ответственных потребителей. Их число должно быть рассчитано. Расчет самозапуска следует проводить с учетом моментных характеристик двигателей, моментов сопротивления и мощности источника питания.
В большинстве случаев такие расчеты проводить необязательно. Об успешности самозапуска можно судить по ориентировочному расчету, в котором определяется лишь остаточное напряжение на выводах двигателей в момент самозалуска. Считается, что для успешного самозапуска напряжение должно составлять не менее 0,7ииаи. В этом случае вращающий момент двигателей не снижается больше, чем на 50 % от номинального значения.
Успешный самозапуск возможен прн более низком остаточном напряжении, однако разворот двигателей прн этом затягивается. Длительное протекание пусковых токов приводит к перегреву как самих двигателей, так и питающих элементов, поэтому затягивание самозалуска нежелательно.
Величина остаточного напряжения, а следовательно, и успешность самозапуска зависит от соотношения мощностей запускаемых двигателей и резервного источника, а также от того, был или не был нагружен резервный элемент до подключения к нему запускаемых двигателей. Для определения мощности двигателей, которые могут быть оставлены для самозапуска при действии схемы АВР. рекомендуется пользоваться таблицей 1.1 Величины сопротивлений и мощностей приведены в относительных единицах. За базисную принята мощность резервного трансформатора [3].
Данные таблицы 1.1 получены для наиболее тяжелого случая самозапуска, когда двигатели полностью остановлены. Критерием успешного самозапуска принята величина остаточного напряжения на двигателях в момент их пуска, равная Q=55U HOM. Как было отмечено выше, при таком напряжении самозапуск оказывается затянутым. Следует иметь в виду, что в таблице указаны предельные значения мощностей. Практически эти значения меньше, и самозапуск двигателей происходит достаточно быстро.
pue8.ru
Электрическое торможение асинхронных электродвигателей
Торможение противовключением. Режим противовключения имеет место в том случае, когда ротор включенного в сеть электродвигателя по инерции или под действием момента сопротивления вращается в сторону, противоположную направлению вращения магнитного поля статора. При этом электродвигатель развивает значительный тормозной момент и происходит весьма интенсивное торможение.
Данный способ торможения применяется как для ускорения остановки механизма, так и для получения устойчивых скоростей при спуске грузов (в подъемных устройствах). Если, например, требуется быстро остановить электродвигатель, то можно на ходу произвести переключение его статорной обмотки (поменять местами две фазы). При этом магнитное поле статора начнет вращаться в сторону, противоположную направлению вращения ротора, который будет интенсивно затормаживаться. При снижении скорости ротора до нули статорную обмотку необходимо от сети отключить, иначе ротор начнет вращаться в противоположную сторону.
Допустим, асинхронная машина работает в двигательном режиме на естественной характеристике а в точке 1 при М1=Мс (рис. 51,а). Чтобы перевести электродвигатель в режим противовключения, в его роторную цепь вводится добавочное сопротивление Rп и изменяется направление вращения магнитного поля путем переключения статорной обмотки. Очевидно, что при этом электродвигатель должен перейти на работу по искусственной характеристике b, уравнение которой будет иметь вид
Переход электродвигателя на работу с естественной характеристики (точка 1) на искусственную (точка 2) происходит по прямой, параллельной оси абсцисс. Однако в точке 2 электродвигатель устойчиво работать не может, так как развиваемый им момент М2 ни по абсолютной величине, ни по знаку не совпадает с моментом сопротивления Мс. Поэтому скорость электродвигателя начинает резко уменьшаться и в точке 3 становится равной 0. В этот момент обмотку статора необходимо отключить от сети, иначе ротор начнет вращаться в противоположную сторону. При использовании режима противовключения для ускорения реверса электродвигателя обмотку статора от сети отключать не следует.
Необходимо иметь в виду, что дополнительное сопротивление Rп вводится в цепь ротора с тем, чтобы избежать слишком большого толчка тока в сети. Возможность подключения дополнительных сопротивлений в цепь ротора имеется лишь у электродвигателей с контактными кольцами. У электродвигателей же с короткозамкнутым ротором такой возможности нет и для ограничения тока при их торможении иногда дополнительное сопротивление включает в цепь статора, хотя это приводит к существенному снижению тормозного момента.
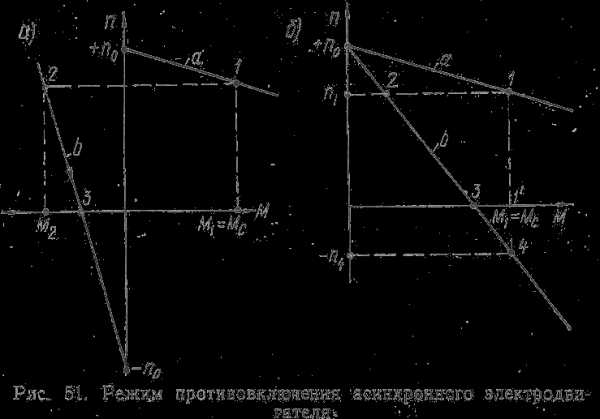
Режим противовключения дает неплохие результаты, если требуется производить спуск грузов с заданными скоростями. Пусть электродвигатель работает на подъем груза на естественной характеристике а в точке 1 (рис. 51,б), развивая момент М1 = Mс. Когда груз будет поднят на заданную высоту и его необходимо спустить, в цепь ротора можно включить дополнительное сопротивление Rп и электродвигатель перейдет на работу по искусственной характеристике b, уравнение которой
При введении достаточного дополнительного сопротивления искусственная характеристика b будет проходить левее точки 1’ (М1 =Mс). В этом случае электродвигатель устойчиво будет работать в точке 4, а груз опускаться со скоростью — n4, которую можно регулировать, вводя различные сопротивления в роторную цепь. Чем больше величина сопротивления, введенного в цепь ротора, тем выше установившаяся скорость спуска.
Уменьшая сопротивление роторной цепи, можно соответственно уменьшить скорость спуска до нуля, а затем сделать ее отрицательной, т. е. заставить груз подниматься. Последнее возможно в том случае, если вращающий момент машины окажется больше, чем момент, создаваемый грузом на ее валу.
Режим противовключения является простым и достаточно надежным тормозным режимом, но отличается неэкономичностью из-за больших потерь энергии и в дополнительных сопротивлениях. Наилучшие результаты он дает у электродвигателей с контактными кольцами, где имеется возможность произвольно менять активное сопротивление роторной цепи.
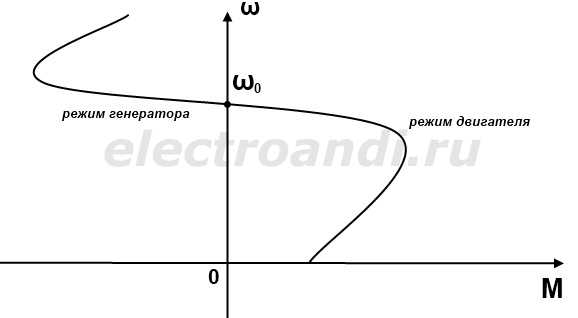
Генераторный режим с отдачей энергии в сеть. Ротор асинхронного электродвигателя под влиянием внешних сил (например, опускающегося груза) может превысить синхронную скорость и вращать в направлении вращения магнитного поля статора со скоростью п2>п1. В этом случае скольжение s<0.
Соответственно меняют свой знак э. д. с. и ток в роторе, а также вращающий момент, развиваемый электродвигателем.
Таким образом, при определенных условиях асинхронный электродвигатель без всяких переключений может переходить из двигательного режима в генераторный, возвращая некоторую часть электроэнергии в сеть.
Торможение с отдачей энергии в сеть чаще всего применяется для ограничения скорости спуска груза у портальных кранов с большой высотой подъема, где этот способ торможения позволяет получить существенную экономию энергии.
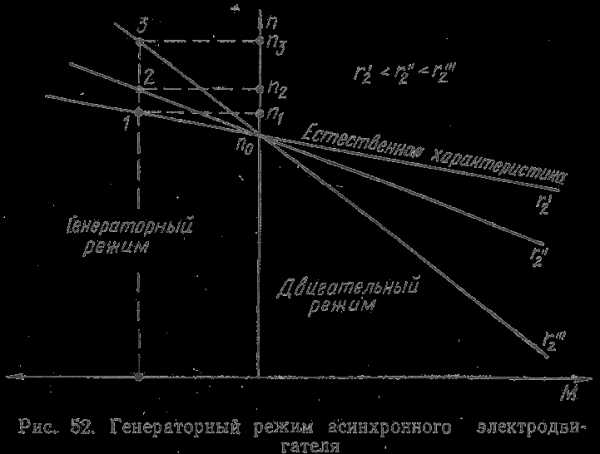
Уравнение механических характеристик для генераторного режима следующее
Оно показывает, что характеристики электродвигателя являются прямым продолжением характеристики двигательного режима и располагаются во II квадранте (рис. 52).
Кроме того, уравнение (101) показывает, что скорость спуска груза можно регулировать, вводя различные активные сопротивления в цепь ротора. Недостатком данного способа торможения следует считать повышенную скорость спуска груза. Даже при работе на естественной характеристике минимальная скорость спуска груза при данном способе торможения всегда превосходит наибольшую скорость его подъема примерно на 10—12%. При введении же дополнительных сопротивлений в цепь ротора скорость спуска груза значительно увеличивается (в некоторых случаях до двойной синхронной). Очевидно, что чем выше скорость электродвигателя в генераторном режиме, тем больше электроэнергии возвращается в сеть. Расчеты показывают, что таким путем можно возвращать в сеть более 30% энергии, затраченной на подъем груза. Особенно большую экономию энергии данный способ дает при погрузке судов, когда высота спуска груза значительно больше, чем высота его подъема.
Режим динамического торможения. В последние годы в станочных и некоторых крановых схемах широкое применение получил режим динамического торможения асинхронных электродвигателей при питании обмотки статора постоянным током.
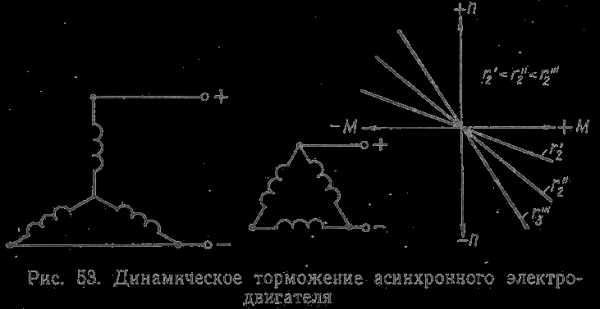
Обмотка статора работающего электродвигателя отключается от сети трехфазного тока и подключается к источнику постоянного тока (рис. 53), в качестве которого может использоваться селеновый или купроксный выпрямитель, монтируемый непосредственно у электродвигателя. При этом магнитное поле машины будет неподвижным, в обмотке ротора при его вращении будет наводиться э. д. с. и появится ток, т. е. электродвигатель превратится в генератор, создающий тормозной момент. Таким образом, данный способ аналогичен торможению электродвигателей постоянного тока замыканием на сопротивление при независимом возбуждении. Ротор электродвигателя, работающего в этом режиме, может вращаться по инерции или под действием момента внешних сил. Передаваемая при этом электродвигателю механическая энергия преобразуется в его роторе в электрическую, а последняя в тепловую.
Характеристики режима динамического торможения проходят через начало координат и до некоторого предела их можно считать прямолинейными (см. рис. 53). Жесткость характеристик определяется величиной активного сопротивления роторной цепи. Чем выше величина сопротивления, тем мягче характеристика электродвигателя в этом режиме. Регулируя сопротивление, можно изменить число оборотов электродвигателя и тем самым регулировать, например, скорость спуска груза.
Торможение при однофазном включении. Иногда в крановых схемах на время спуска груза обмотка статора подключается только к двум фазам трехфазной сети. При этом вместо вращающего будет образовываться пульсирующее магнитное поле статора. Когда ротор под действием внешних сил будет вращаться в этом магнитном поле, то согласно закону Ленца в его обмотке будет индуктироваться ток, создающий тормозной момент. Путем соответствующего подбора сопротивлений, включаемых в роторную цепь, можно получать различные тормозные характеристики, позволяющие опускать груз со скоростями как ниже, так и выше синхронной. Скорость спуска при одном и том же тормозном моменте будет тем больше, чем большее сопротивление введено в цепь ротора.
Изменение направления вращения. Как указывалось, для изменения направления вращения асинхронного электродвигателя необходимо изменить направление вращения магнитного поля статора. Для этого достаточно поменять местами любые два провода, подводящие ток к зажимам статора. Такое переключение статорной обмотки можно осуществить посредством двухполюсного переключателя или двух-, трехполюсных контакторов (рис. 54).
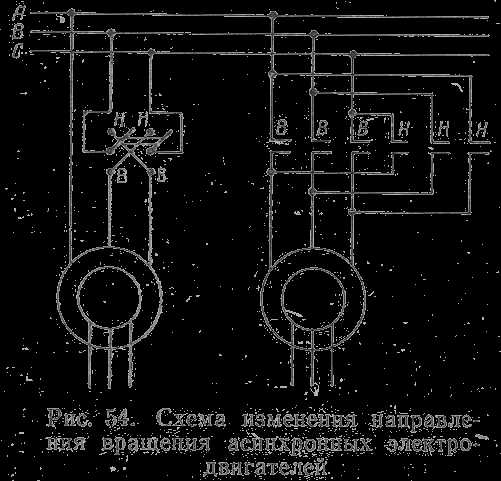
Нужно помнить, что изменению направления вращения на ходу предшествует торможение противовключением, которое для электродвигателей с фазным ротоном недопустимо без предварительного введения сопротивления в цепь ротора.
vdvizhke.ru
§89. Синхронный двигатель, принцип действия и устройство синхронного двигателя
Синхронный двигатель. Принцип действия и устройство. Синхронный двигатель может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор. Его обмотка якоря I (рис. 291, а) подключена к источнику трехфазного переменного тока; в обмотку возбуждения 2 подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент М (рис. 291,б), приводящий ротор 3 во вращение. Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n1, с которой вращается магнитное поле (до синхронной частоты вращения). Объяс-
Рис. 291. Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя
няется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки.
Электромагнитный момент. Электромагнитный момент в синхронном двигателе возникает в результате взаимодействия магнитного потока ротора (потока возбуждения Фв) с вращающимся магнитным полем, создаваемым трехфазным током, протекающим по обмотке якоря (потоком якоря Фв). При холостом ходе машины оси магнитных полей статора и ротора совпадают (рис. 292,а). Поэтому электромагнитные силы I, возникающие между «полюсами» статора и полюсами ротора, направлены радиально (рис. 292, б) и электромагнитный момент машины равен нулю. При работе машины в двигательном режиме (рис. 292, в и г) ее ротор под действием приложенного к валу внешнего нагрузочного момента Мвн смещается на некоторый угол 0 против направления вращения. В этом случае в результате электромагнитного взаимодействия между ротором и статором создаются электромагнитные силы I, направленные по направлению вращения, т. е. образуется вращающий электромагнитный момент М, который стремится преодолеть действие внешнего момента Мвн. Максимум момента Мmaxсоответствует углу ? = 90°, когда оси полюсов ротора расположены между осями «полюсов» статора.
Если нагрузочный момент Мвн, приложенный к валу электродвигателя, станет больше Мmax, то двигатель под действием внешнего момента Мвн останавливается; при этом по обмотке якоря неподвижного двигателя будет протекать очень большой ток. Этот режим называется выпаданием из синхронизма, он является аварийным и не должен допускаться.
При работе машины в генераторном режиме (рис. 292, д и е) ротор под действием приложенного к валу внешнего момента Мвн смещается на угол ? по направлению вращения. При этом создаются электромагнитные силы, направленные против вращения, т. е. образуется тормозной электромагнитный момент М. Таким образом, при изменении значения и направления внешнего момента на валу ротора Мвн изменяется лишь угол ? между осями полей статора и ротора, в то время как в асинхронной машине в этом случае изменяется частота вращения ротора.
Пуск в ход и регулирование частоты вращения. Синхронный двигатель не имеет начального пускового момента. Если подключить обмотку якоря к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды менять свое направление, т. е. средний момент за период будет равен нулю. Следовательно, для пуска в ход синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. Для этой цели применяют метод асинхронного пуска. Синхронный двигатель пускают в ход как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой 3 (рис. 293). В полюсные наконечники ротора 2 синхронного двигателя закладывают медные или латунные стержни, замкнутые накоротко двумя торцовыми кольцами. Пусковая обмотка выполнена подобно беличьей клетке асинхронной машины, но занимает лишь часть окружности ротора. В некоторых двигателях специальная короткозамкнутая обмотка
Рис. 292. Электромагнитный момент в синхронной машине, образующийся в различных режимах
Рис. 293. Схема асинхронного пуска синхронного двигателя;
Рис. 294 Устройство пусковой обмотки синхронного двигателя: 1 — ротор; 2 — стержни; 3 — кольцо; 4 — обмотка возбуждения
electrono.ru
Трехфазный асинхронный генератор
Асинхронному двигателю свойственен принцип обратимости электрических машин, согласно которому, он может работать в режиме асинхронного генератора и отдавать электроэнергию во внешнюю сеть.
Для того чтобы перейти в режим генератора, ротор двигателя должен вращаться другим приводным двигателем (ПД), с частотой больше частоты вращения магнитного поля (синхронной). При этом скольжение двигателя становится отрицательным, а ЭДС ротора меняет свое направление на противоположное. Токи, возникающие под действием ЭДС, меняют свое направление, и генератор начинает отдавать энергию в сеть. Электромагнитный момент на роторе, также меняет свое направление и становится для приводного двигателя тормозящим. Таким образом, на выводах обмотки статора можно получить переменное напряжение, величина которого будет зависеть от схемы соединения.
Для того чтобы создавать вращающееся магнитное поле, генератору требуется реактивная энергия, которую он потребляет из сети, то есть должно происходить возбуждение. Без возбуждения работа генератора невозможна. Именно по этой причине, асинхронный генератор не получил широкого распространения.
Возбуждение может происходить и другим путем – самовозбуждением. При этом к выводам статора подключается батарея конденсаторов, которая является источником реактивной мощности. Таким образом, генератор может работать автономно, то есть вырабатывать энергию при отсутствии внешнего источника. Это свойство используются в различных ветровых генераторах и на малых гидроэлектростанциях.
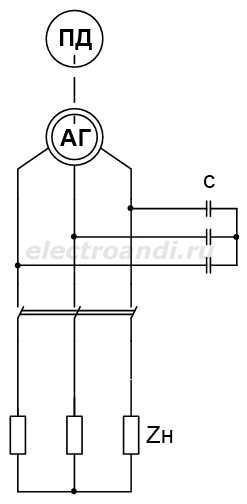
Батарея конденсаторов, сильно удорожает всю систему, что также влияет на распространение асинхронных генераторов.
Но генераторный режим асинхронного двигателя используется не только для получения электроэнергии, но и в процессах торможения двигателя. Например, при генераторном торможении, когда груз, опускаясь, заставляет вращаться ротор со скоростью большей синхронной и двигатель начинает отдавать энергию в сеть.
В качестве асинхронных генераторов, в основном применяют двигатели с короткозамкнутым ротором. Так как улучшенные пусковые характеристики двигателя с фазным ротором, в данном случае не требуются.
Читайте также - Асинхронный преобразователь частоты
electroandi.ru
Принцип действия асинхронного двигателя
⇐ ПредыдущаяСтр 7 из 28Следующая ⇒
Простейшим по своему устройству и самым распространенным является изобретенный М.О. Доливо-Добровольским асинхронный двигатель. Работа двигателя основана на принципе воздействия вращающегося магнитного поля на приспособленную для вращения короткозамкнутую обмотку.
Принципиально асинхронный двигатель состоит из неподвижной части - статора и вращающей части-ротора с соответствующей обмоткой. Сердечник статора имеет форму полого цилиндра. В пазах с внутренней стороны этого сердечника уложены три обмотки (фазы), сдвинутые одна относительно другой на 120°.
Фазы обмотки статора А-х, В-у, С-z размещены равномерно по окружности статора, они соединяются в «звезду» или «треугольник» и подключаются к сети переменного трехфазного тока и возникающие в ней токи возбуждают вращающееся магнитное поле машины.
У подвижной части - ротора сердечник имеет форму цилиндра и закреплен на валу. В пазах на поверхности сердечника размещается обмотка ротора-короткозамкнутая. Обмотка ротора имеет вид цилиндрической клетки из медных или алюминиевых стержней, замкнутых на торцах двумя кольцами из того же материала. Такую обмотку называют «беличьим колесом». Стержни обмотки вставляются в пазы ротора без изоляции. Часто короткозамкнутая обмотка ротора изготавливается путем заливки расплавленным алюминием пазов сердечника с одновременным отливанием и замыкающих колец.
Вращающееся магнитное поле, создаваемое обмотками статора, пересекая проводники обмотки ротора, индуктирует в них ЭДС. Под действием индуктированных ЭДС по проводникам ротора будет проходить электрический ток. В результате взаимодействия тока ротора с вращающимся магнитным полем возникает электромагнитные силы, действующие на обмотку ротора. Суммарные действия этих сил создает вращающий момент, который приводит ротор во вращение в направление магнитного поля.
Величина ЭДС индуктированной в проводниках обмотки ротора, зависит от частот их пересечения вращающимся магнитным полем, т.е от разности частот вращения магнитного поля n1 и ротора n2. Чем больше разность (n1-n2), тем больше величина ЭДС.
Частота вращения ротора n2 будет всегда меньше синхронной частоты n1, т.е ротор всегда отстает от поля статора. Разность между частотами поля статора n1 и поля ротора n2 называется частотой скольжения ∆n.
∆n= n1- n2
Следовательно, необходимым условием для возникновения в асинхронной машине электромагнитного вращающегося момента является неравенство частот вращения n1 и n2. Только при этом условии в обмотке ротора индуктируется ЭДС и возникает ток ротора. По этой причине машина называется асинхронной (Ротор ее вращается несинхронно с полем).
Скольжение
Чтобы охарактеризовать отставание частоты вращения ротора двигателя от частоты вращения магнитного поля, введено понятие скольжение. Отношение частоты скольжения к частоте поля называется скольжением. Скольжение S выражают в процентах от частоты вращения магнитного поля.
Частота вращения ротора, выраженная через скольжение, определяется формулой;
Направление вращения ротора асинхронного двигателя определяется направлением вращения его магнитного поля, а направление вращения магнитного поля обуславливается последовательностью фаз (А, В, С) трехфазной сети. Для изменения направления вращения двигателя достаточно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка поступления импульсов тока в отдельные обмотки. Например: если импульсы тока будут поступать в обмотки статора в следующем порядке: фаза А, фаза В, фаза С, то ротор двигателя будет вращаться по часовой стрелки. Если изменить порядок поступления импульсов тока и подавать их в последовательности: фаза В, фаза А. фаза С, то ротор двигателя начнет вращаться против часовой стрелки.
При пуске двигателя в Ход вращающееся магнитное поле пересекает обмотку ротора с большой скоростью и индуктирует в ней значительную ЭДС (Е2), которая создает в коротко замкнутом роторе большой пусковой ток. Соответственно и в обмотке статора также возникает значительный пусковой ток.
По мере того, как скорость ротора возрастает, уменьшается Е2, индуктируемая в нем ЭДС, а вместе с ней уменьшаются токи ротора и статора. В конце пуска ненагруженного двигателя сила тока ротора должна быть такой, чтобы вращающий момент, развиваемый двигателем покрывал все его механические потери от трения в подшипниках.
Если нагрузить уже вращающийся асинхронный двигатель, то механический тормозящий момент на валу двигателя сначала окажется больше вращающего момента и ротор уменьшит скорость вращения n2. Соответственно возрастает разность скоростей (n1-n2), т.е увеличится скольжение.
Вращающиеся поле будет пересекать ротор с относительно большой скоростью и индуктировать в роторе большую ЭДС (Е2). Возрастание ЭДС (Е2) вызовет увеличение тока в роторе. Пропорционально силе тока в роторе возрастет вращающий момент и уравновесит тормозящий момент нагрузки на валу двигателя. Одновременно увеличение силы тока ротора вызовет соответствующее повышение силы тока статора, в результате возрастет и потребление мощности двигателя из сети. Таким образом с увеличением нагрузки на валу двигателя возрастает скольжение, сила тока статора и потребление мощности двигателя из сети.
Скорость вращения ротора асинхронного двигателя определяется:
, об/мин.
При пуске асинхронной тяговой машины необходимо регулировать уровень и частоту трехфазного напряжения, питающего его обмотки, которое осуществляется трехфазным автономным инвертором напряжения.
На вагонах 81-740.1, 81-741.1 установлены тяговые двигатели типа ДАТЭ-170-4. Двигатель самовентилируемый, четырехполюсный, трехфазный асинхронный с короткозамкнутым ротором.
Технические данные:
1. Номинальная мощность – 170 кВт;
2. Номинальная частота – 43 Гц;
3. Частота вращения (синхронная) – 1290 об/мин;
4. Максимальная частота вращения – 3600 об/мин;
5. Номинальное напряжение – 530 В;
6. Номинальное скольжение – 1,6 %;
7. Коэффициент мощности, cosφ – 0,85;
8. Масса двигателя – 805 кг.
Двигатель состоит из статора, ротора, вентилятора, подшипниковых щитов. Общий вид двигателя представлен на рис.18.
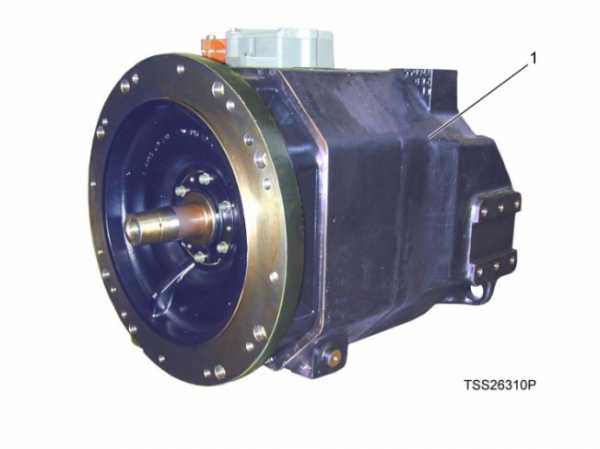
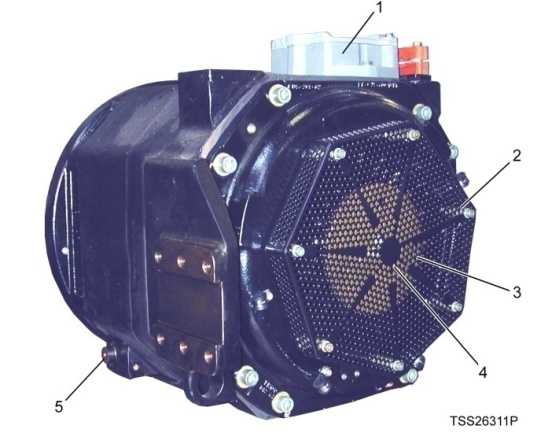
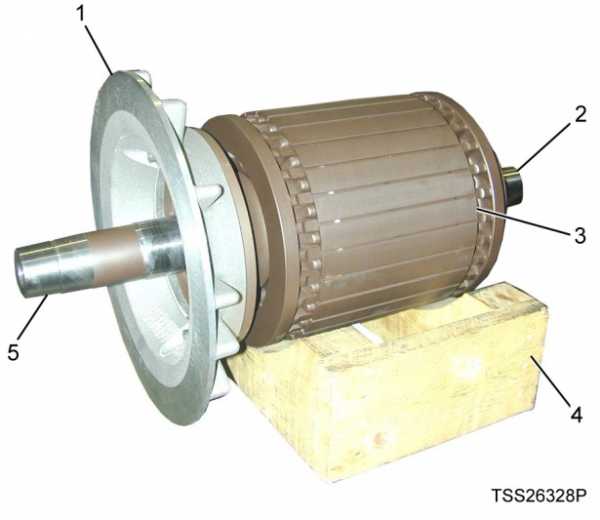
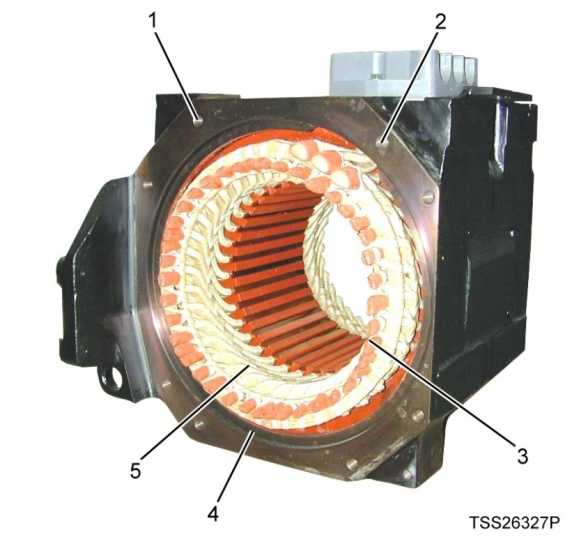 Рис.18
Рис.18
(а) (б)
Рис.19
Статор (рис.19,а) двигателя состоит из литой станины зашихтованного листами из электротехнической стали, сердечника и обмотки. В пазы статора уложены двухслойная обмотка, выполненная жесткими секциями и закрепленная в пазах изоляционными клиньями.
Схема соединений обмотки статора выполнена со стороны, противоположной выступающему концу вала ротора. К боковой поверхности станины приварена коробка выводов для крепления трех выводных концов обмотки, соединенной в «звезду».
Ротор (рис.19,б) состоит из вала, сердечника и короткозамкнутой обмотки ротора. Шихтованный сердечник из электротехнической стали насаживается на вал, в неизолированные пазы сердечника вставляются медные стержни. Концы медных стержней, выступающие из сердечника ротора, замкнуты на коротко приваренными к ним медными кольцами.
Щиты подшипниковые стальные, вставляются в расточку станины и крепятся к ней болтами. В щиты устанавливаются подшипники: роликовый со стороны приводного конца вала типа 32313 и шариковый с противоположной стороны типа 180313С17. С наружной стороны подшипники закрыты крышками.
Для охлаждения двигателя со стороны привода на вал насажен вентилятор. В корпусе статора предусмотрены два отверстия для слива конденсата образующегося при работе двигателя. Для прохождения охлаждающего воздуха через двигатель в станине со стороны привода и в подшипниковом щите со стороны противоположной приводу предусмотрены отверстия, которые закрыты крышками с металлическими сетками.
Двигатель поставляется с зубчатым колесом. Датчик частоты вращения должен устанавливаться в специально предусмотренном алюминиевом корпусе, прикрепленном к подшипниковому щиту.
Тяговые двигатели установлены на первой и третьей тележках по два на каждую.
Обмотки четырех тяговых двигателей соединены параллельно и питаются от одного автономного инвертора. Напряжение на инвертор подается от сети постоянного тока 750В через быстродействующий выключатель и входной LC- фильтр. Напряжение с выхода инвертора поступает непосредственно на трехфазную систему сборных шин, к которой подключены четыре тяговых двигателя.
На каждом двигателе установлено устройство (датчик частоты вращения) для измерения числа оборотов. Информация о числе оборотов вводится в схему управления автономным инвертором, которая обеспечивает регулирование напряжения и частоты тока обмоток асинхронных машин по определенному закону. Этот закон формируется при выборе машинистом рукояткой контроллера машиниста того или иного пускового положения. В начале пуска асинхронных машин транзисторные ключи переключаются с частотой 1-2 Гц. При этом к обмотке статора асинхронных машин подводится напряжение, составляющее 2-5 % напряжения контактной сети. Регулирование подводимого напряжения обеспечивается путем изменения ширины импульса при постоянном значении периода (широтноимпульсная модуляция ШИМ).
По мере разгона вагона, постепенно повышается напряжение на обмотках статора асинхронных машин и увеличивается частота тока в них (повышается частота работы транзисторных ключей, импульсы управления, на которые начинают поступать чаще).
Для подавления высших гармоник в кривых фазового тока, содержание которых зависит от частоты импульсной модуляции, разности между напряжением на нагрузки и напряжением контактной сети, режимы работы привода, на входе автономного инвертора установлен LC-фильтр. Поэтому из цепи источника питания потребляется почти постоянный ток.
Переход из режима тяги в режим торможения осуществляется путем отключения линейного контактора (ЛК) и изменения частоты работы инвертора в сторону уменьшения. При этом тяговые двигатели переходят в генераторный режим, а импульсный инвертор выполняет функции управляемого выпрямителя. Для согласования мощности асинхронных машин в режиме торможения с установленной мощностью автономного инвертора в цепь обмоток асинхронных машин включен тормозной резистор. На этом резисторе рассеивается часть тормозной энергии в диапазоне высоких скоростей торможения.
При отсутствии в сети потребителей, рекуперируемая электрическая энергия через тормозной преобразователь поступает в дополнительные тормозные резисторы и рассеивается в них.
Читайте также:
lektsia.com
Асинхронные двигатели Электрические машины | Техника и Программы
Обмотки статора в асинхронном двигателе выглядят так же, как и в синхронном. Однако вместо питаемых извне обмоток ротора в синхронных двигателях в асинхронных ротор выполнен с несколькими медными или алюминиевыми аксиальными полосками, вложенными в пазы на наборе железных пластин, расположенных по окружности ротора. При возбуждении обмоток статора многофазным током возникает вращающееся магнитное поле, как и в синхронном двигателе. Это магнитное поле наводит токи в полосках проводников в роторе и создает вращающий момент. Ротор может вращаться и медленнее, чем поле статора, и быстрее. Если ротор вращается медленнее поля, то на валу двигателя возникает вращающий момент. Если, наоборот, к валу приложен вращающий момент в направлении вращения и скорость вращения ротора выше скорости вращения поля статора, мотор превращается в генератор, поставляющий энергию в цепь питания. Разность в скоростях вращения вала и магнитного поля называется проскальзывание полюсов и выражается в процентах или долях единицы от скорости вращения поля. Асинхронный двигатель может работать как генератор без потребления внешней энергии для возбуждения магнитного поля. Остаточная намагниченность ротора способствует началу работы такого генератора. Однако может понадобиться и подтолкнуть процесс запуска с помощью, например, батареи заряженных конденсаторов, на короткое время подключаемых к статорной обмотке.
На Рис. 8.5 приведена эквивалентная схема асинхронной машины. Х$, XR, Rs и Rx представляют собой реактансы и сопротивления статора и ротора соответственно. Хм является реактансом возбуждения, и все реактансы определены для рабочей частоты цепи питания. Сопротивление i?R(l-s)/s представляет собой эквивалентное сопротивление нагрузки мотора. При выражении всех постоянных в виде, приведенном к единице, мощность, вырабатывающая вращающий момент на валу, будет равна PR = /R2i?R(l s)/s, а момент на валу будет T= IR2R^Js. Единичный вращающий момент равен 4488-hp/(2n-rpm). Размерность здесь следующая: кг-м — для вращающего момента, л. с. — для паспортной мощности hp и об/мин — для скорости вращения rpm. Для большинства расчетов потери на возбуждение можно не учитывать.
Рис. 8.5. Эквивалентная схема acwocpowioH машины
На Рис. 8.6 приведены графики зависимости тока потребления и вращающего момента от скорости вращения асинхронного двигателя, питаемого непосредственно от сети. Точкой 1 отмечен режим с заблокированным (невращающимся) ротором, точкой 2 — режим начала возрастания вращающего момента и точкой 3 — начало спада вращающего момента. Необходимо отметить, что при заблокированном роторе ток потребления двигателя составляет 600% от тока при номинальной нагрузке при вращении. Да и в течение всего процесса выхода двигателя на номинальный режим его ток потребления остается в несколько раз больше номинального. Это обстоятельство следует иметь в виду при выборе предохранителей или автоматических выключателей в цепях питания двигателей. Пусковой ток можно уменьшить с помощью резистора, реактора, автотрансформатора или тиристорного пускателя, но все это — ценой уменьшения вращающего момента.
Сопротивление обмоток ротора является ключом к созданию вращающего момента. При увеличении этого сопротивления возрастает способность мотора к выработке большего вращающего момента, но уменьшается КПД и растет проскальзывание. В двигателях, предназначенных для получения большого вращающего момента, обмотки ротора иногда делают из железа. Некоторые из этих двигателей способны работать в широком диапазоне напряжений питания при постоянной его частоте, хотя потери в них весьма велики.
Когда асинхронные двигатели работают от схем управления с переменной частотой, их ток потребления и вращающий момент в зависимости от
Рис. 8.6. Зависимости тока потребления и вращающегомомента от скорости вращения
acutLcpontto?o двигателя
скорости вращения ведут себя так же, как и на Рис. 8.6, только 100% скорости определяется текущей частотой питающей линии. В типовом режиме такой работы питающее напряжение выбирается пропорциональным частоте, хотя потери на сопротивлениях требуют некоторого повышения напряжения при низких частотах.
Если асинхронный двигатель соединен с источником питания, но на его вал приложен внешний вращающий момент, обеспечивающий вращение с более высокой скоростью, чем номинальная, то зависимости тока потребления и вращающего момента от скорости вращения приобретают вид, показанный на Рис. 8.7. Этот генераторный (суперсинхронный) режим обычно ограничен малым диапазоном скоростей — от скорости, точно соответствующей синхронному режиму, до скорости, соответствующей максимуму потребляемого вращающего момента. Обычно такой режим работы (с рекуперацией энергии) возникает, например, при опускании нагрузки подъемным краном, хотя асинхронные генераторы и используются довольно часто на маленьких гидрои ветроэлектростанциях, включенных в общую электросеть. Это связано с отсутствием необходимости в этих случаях управлять напряжением или фазой этих генераторов. Кривые на Рис. 8.7 просто напоминают о том, что с изменением знака вращающего момента происходит и изменение направления движения потока энергии.
Современные схемы управления асинхронными двигателями с переменной частотой питающего напряжения способны определять отдельно
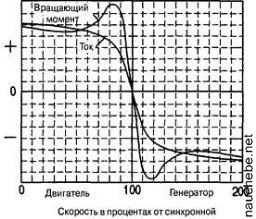
Рис. 8.7. Работа асинхронного двигателя врежиме генератора
компоненты тока намагничивания и тока, совершающего работу в общем токе потребления, и оптимизировать рабочую точку двигателя. Известные под названиями векторная схема управления вращающим моментом или схема управления магнитньш полем, эти схемы обеспечивают точное управление асинхронными двигателями, позволяющее заменять ими двигатели постоянного тока и синхронные двигатели во многих применениях, включающих работу при постоянной мощности в нагрузке и расширенные режимы по скоростям. Однако очень большие двигатели остаются синхронньши, что связано с их большим КПД.
Классификация асинхронных двигателей
Национальная ассоциация производителей электротехнической промышленности (NEMA) разработала классификацию асинхронньас двигателей по виду их зависимостей тока и вращающего момента от скорости вращения. На Рис. 8.8 показаны эти характеристики для основных классов асинхронных двигателей. Конструкция А обладает высоким КПД и имеет хороший пусковой момент вращения, но при большом пусковом токе. При расчетной нагрузке проскальзывание мало. Конструкция В имеет меньший пусковой ток, но большее проскальзывание при полной нагрузке и меньший КПД, чем конструкция А. Обе эти конструкции применяются в насосах и вентиляторах, где предъявляются средние требования к пусковому моменту вращения. Конструкцию С отличает высокий пусковой момент вращения, что обычно достигается применением в роторе сдвоенных проводящих полос из металлов с высоким и низким сопротивлением. КПД в этой конструкции ниже по сравнению с конструкциями А и В, а применяется она чаще всего в компрессорах и конвейерных линиях. Двигатели конструкции D используются для нагрузок с большим и изменяющимся вращающим моментом. К ним относятся, например, штамповальные прессы и резаки. Эти двигатели имеют самый низкий КПД.
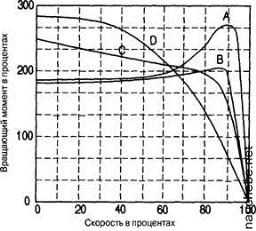
Рис. 8.8. Классификация асинхронных двигателей по виду их зависимостей тока и враищюгцвго момента от скорости вращения согласно NEMA
8.4. Конструкции корпусов
На Рис. 8.9 показано несколько вариантов конструкций корпусов асинхронных двигателей. Слева приведена открытая конструкция, обеспечивающая защиту от капель воды (ODP — open drip-proof) и снабженная вентилятором на валу двигателя, обеспечивающим его охлаждение. Это наименее дорогой тип двигателей. Следующей приведена полностью герметичная невентилируемая конструкция (TENV — totally enclosed nonventilated). Охлаждение в этом случае осуществляется за счет конвекции и излучения, но зато эти двигатели не подвержены влиянию коррозионно-активных и взрывоопасных примесей в воздухе. Двигатели этого типа дороже и больше по размерам при одинаковой мощности, чем типа ODP. В полностью герметичной конструкции с обдувом воздуха (TEAO — totally enclosed air-over) на вал двигателя типа TENV устанавливается вентилятор, служащий для охлаждения корпуса. И наконец, в двигателях с полностью герметичным корпусом и отдельной вентиляцией (TESV — totally enclosed separately ventilated) для охлаждения используется поток воздуха, подаваемый извне.
Рис. 8.9. Типы корпусов двигателей
Источник: Сукер К. Силовая электроника. Руководство разработчика. — М.: Издательский дом «Додэка-ХХI, 2008. — 252 c.: ил. (Серия «Силовая электроника»).
nauchebe.net






Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






