
Синхронные двигатели на постоянных магнитах
Один из довольно сложных и требующих обслуживания элементов мотора – это коллектор. Он усложняет конструкцию, а также увеличивает габариты двигателя. Поэтому, если вы хотите выбрать компактный и высокопроизводительный электродвигатель, в котором отсутствуют вращающиеся контакты – основной источник потерь в моторах на постоянных магнитах – вам стоит купить бесколлекторный электродвигатель.
Как понятно из названия, синхронные двигатели на постоянных магнитах – это двигатели постоянного тока, в чьей конструкции отсутствует коллектор, их также можно заказать под именем вентильных или, как принято в зарубежной документации, бесщеточных электродвигателей постоянного тока. Они состоят из статора с обмотками и ротора с постоянными магнитами, и их стоимость несколько выше стандартных коллекторных моторов. Это обусловлено управлением электронного регулятора. Раньше подобный блок управления был довольно дорог и не обладал необходимыми характеристиками. Однако с течением времени показатели допустимого рабочего тока и внутреннего сопротивления улучшились, а цена уменьшилась.
Однако с течением времени показатели допустимого рабочего тока и внутреннего сопротивления улучшились, а цена уменьшилась.
Чем же хорош бесколлекторный синхронный электродвигатель? Купить его стоит, если вы стремитесь выбрать мотор со сравнительно небольшими габаритами и низкой потребляемой мощностью. Преимущество таких электродвигателей кроется в отсутствии коллектора, из-за чего:
- размер двигателя становится компактнее;
- уменьшены потери на коммутацию, так как роль щеток и контактов коллектора играют электронные ключи;
- снижен порог нагревания;
- получен высокий крутящийся момент с нулевой скорости вращения;
- зафиксирован хороший перенос высокой стартовой нагрузки;
- КПД двигателей на магнитах составляет 80-95%, что гарантирует лучшее соотношение цена/качество.
Также стоит купить синхронный двигатель постоянного тока на постоянных магнитах, если вы выбираете оборудование, не создающее радиопомех. Синхронные электродвигатели такого рода используются даже в тяжелых или агрессивных условиях промышленной отрасли, в военной и оборонной сфере.
Синхронные электродвигатели такого рода используются даже в тяжелых или агрессивных условиях промышленной отрасли, в военной и оборонной сфере.
Хотите заказать двигатель постоянного тока на постоянных магнитах? Купить его в Минске можно у менеджеров ЗАО «Вольна». Достаточно оформить онлайн-заказ на сайте или позвонить по телефону + 375-17-510-95-00.
Электродвигатели Parker Hannifin
Электродвигатели.
Электродвигатели Parker Hannifin представлены двигателями постоянного тока, коллекторныыми двигателями с постоянными магнитами, и двигателями переменного тока, синхронными и асинхронными с короткозамкнутым ротором.
Синхронные двигатели.
Серия GVM.
Двигатели GVM являются синхронными серводвигателями переменного тока на постоянных магнитах. Достаточно большая величина крутящего момента, быстродействие и эффективность двигателей Parker Hannifin серии GVM обеспечивают требуемые условия для достижения впечатляющих рабочих характеристик во множестве платформ транспортных средств. Данные двигатели достаточно широко применяются в мотоциклах, скутерах, малотоннажных грузовиках, а также в электрогидравлических насосах.
Данные двигатели достаточно широко применяются в мотоциклах, скутерах, малотоннажных грузовиках, а также в электрогидравлических насосах.
Одним из знаковых применений двигателей серии GVM является использование в мотоциклах-прототипах фирмы Victory в гонке 2015 года на острове Мэн. Гонка на острове Мэн — самая длинная гонка для электромотоциклов в мире.
Двигатель Parker Hannifin серии GVM выдерживает очень высокие средние скорости порядка 200 км/ч
и обеспечивает длительную беспрерывную работу
в экстремальных температурных условиях.
Питание: 24 — 800 В DC.
Тип: синхронный, с редкоземельными магнитами.
Количество полюсов: 12.
Крутящий момент: до 376 Н·м.
Номинальная мощность: до 170 кВт.
Частота вращения: до 9800 Об/мин.
Обратная связь: резольвер, SinCos энкодер, бессенсорный.
Типоразмер: 142, 210.
Исполнение: IP67, IP6K9K (опц.).
Особенности: Отличное решения для мобильных приложений (электрокары, электромотоциклы и т.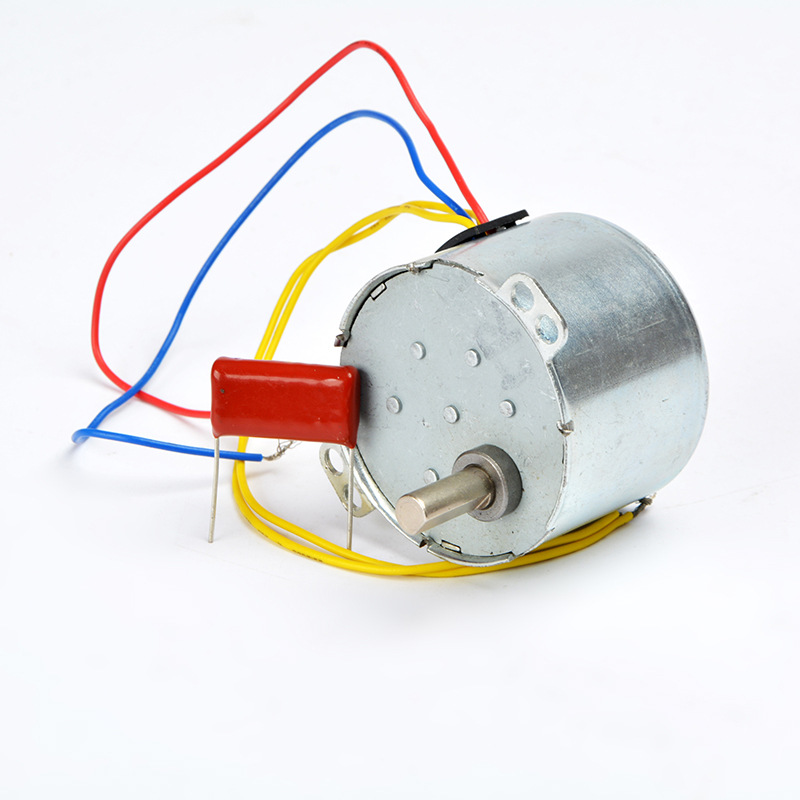 д.).
д.).
Серия NV.
Серия NV — синхронные двигатели с постоянными магнитами разработанные для высокоскоростных приложений. Высокая точность, низкий уровень вибрации и долгий срок службы обеспечивают работу при максимальной скорости вращения до 17000 об/мин. Уровень защиты корпуса: IP64, IP65, IP67 (по запросу).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 11,5 Нм.
Номинальная мощность: 0,7 — 11 кВт.
Частота вращения: 7000 — 17000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 60, 80, 110, 130.
Исполнение: IP64, IP65 (опц.).
Особенности: Подходят для высокоскоростных приложений.
Серия SMB/H/E, MB/H/E, NX.
Серии двигателей SMB/H/E, MB/H/E, NX представляют линейку синхронных двигателей с постоянными или редкоземельными магнитами.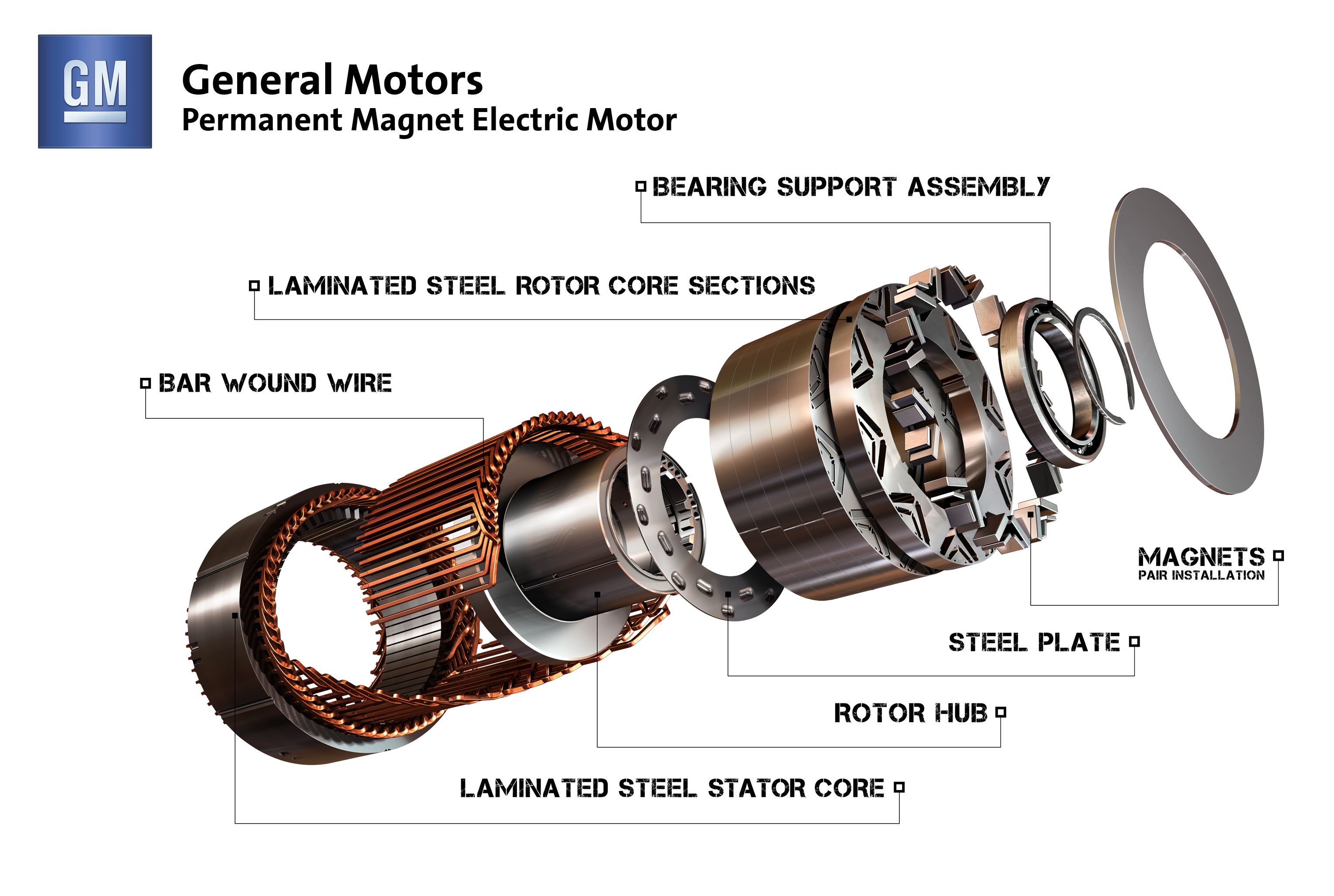
Благодаря инновационной технологии «Salient Pole» (использование неодимового магнита — мощного постоянного магнита, состоящего из сплава редкоземельного элемента неодима, бора и железа) двигатели серии SMB/H/E, MB/H/E достигают высоких ускорений и выдерживают большие перегрузки без риска размагничивания или отрыва магнита. Совместимы со следующими сериями приводов: SLVD-N, TPD-M, HiDrive, ViX, TWIN-N/SPD-N.
Двигатели серии NX — компактные, с низкой пульсацией момента и плавным ходом, являются эффективной альтернативой традиционным индукционным двигателям. Бессенсорная версия двигателя была разработана в качестве альтернативного решения для минимизации затрат в сочетании с приводом Parker Hannifin AC650S.
Питание: 230, 400 — 480 В AC.
Тип: синхронный, с постоянными / редкоземельными магнитами.
Количество полюсов: 4 — 10.
Крутящий момент: 0,35 — 269 Нм.
Номинальная мощность: 0,2 — 67 кВт.
Частота вращения: 0 — 10000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), инк. энкодер.
Типоразмер: 40, 42, 56, 60, 70, 82, 92, 100, 105, 115, 120, 142, 145, 155,170, 205, 265.
Исполнение: IP44, IP64, IP65, IP67.
Особенности: Компактные с низкой пульсацией момента и плавным ходом.
Серия NK.
Серия NK — встраиваемые компактные бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений, обеспечивают работу при максимальной скорости вращения до 15000 об/мин.
Питание: 230, 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 90 Нм.
Номинальная мощность: 0,2 — 34 кВт.
Частота вращения: 1000 — 15000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 42, 56, 62, 80, 110, 143.
Исполнение: IP00.
Особенности: Встраиваемые, компактные, для высокоскоростных приложений.
Серия TM/TK.
Серии синхронных двигателей с постоянными магнитами TM/TK обладают высокой прочностью и обеспечивают работу в жестких условиях. Высокий крутящий момент на малых оборотах предоставляет пользователю решение для следующих приложений: прессы, миксеры, намоточные машины, экструдеры. Серия TM имеет бескорпусное исполнение.
Питание: 400 — 480 В AC.
Тип: синхронный, с постоянными магнитами / +бескорпусной.
Количество полюсов: 24 — 120.
Крутящий момент: 90 — 22100 Нм.
Номинальная мощность: 6,9 — 394 кВт.
Частота вращения: 29 — 2500 Об/мин.
Обратная связь: Endat энкодер, бессенсорный, резольвер (опц.).
Типоразмер, мм: 398, 600, 830 / 230, 385, 565, 795.
Исполнение: IP54 / IP00.
Особенности: Высокий крутящий момент на малых оборотах, для прессов, миксеров, намоточных машин, экструдеров.
Серия HKW/SKW.
Серия HKW/SKW — бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений мощностью до 230 кВт. Электродвигатели используются в приложениях, где высокий крутящий момент на низкой скорости и высокая скорость при постоянной мощности являются критичными характеристиками.
Питание: 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 4 — 16.
Крутящий момент: 3,5 — 1250 Нм.
Номинальная мощность: 2,0 — 230 кВт.
Частота вращения: 260 — 23200 Об/мин.
Обратная связь: бессенсорный, резольвер (опц.).
Типоразмер: 73, 82, 85, 91, 96, 108, 155.5, 195, 242, 310.
Исполнение: IP00.
Особенности: Встраиваемые, решения для высокоскоростных приложений.
Серия MGV.
Синхронный двигатель MGV на постоянных магнитах обеспечивает работу при максимальной скорости вращения до 45000 об/мин, используется во многих компонентах автомобильных или авиационных испытательных установок.
Питание: 400 — 480 В AC.
Тип: синхронный, на постоянных магнитах.
Количество полюсов: 4 — 16.
Крутящий момент: 6,8 — 1500 Нм.
Номинальная мощность: 15 — 500 кВт.
Частота вращения: 5000 — 45000 Об/мин.
Обратная связь: резольвер.
Типоразмер: 430, 635, 840, 860, 950, 966, A50, B40, B50.
Исполнение: IP40.
Особенности: Для высокоскоростных приложений тестовых стендов.
Серия EX/EY.
Синхронные электродвигатели EX/EY с постоянными магнитами обеспечивают работу в Зоне 2 при окружающей температуре от 40 ºC до 60 º. Оборудование соответствует стандартам ATEX, IECEx (Зона 1, 2).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 1,75 — 41 Нм.
Номинальная мощность: до 6,3 кВт.
Частота вращения: 0 — 7600 Об/мин.
Обратная связь: резольвер, энкодер (опц.) (EnDat, Hiperface), бессенсорный.
Типоразмер:, 70, 92, 120, 121, 155.
Исполнение: IP64, IP65.
Особенности: ATEX, IECEx (зона 1, 2).
Асинхронные двигатели. Серия MS/MR.
Асинхронные двигатели серии MR подходят для использования со всеми сериями приводов Parker Hannifin переменного тока. Благодаря прочной жесткой конструкции и своим рабочим характеристикам, двигатели серии MR используются в жестких условиях.
Серия MS асинхронных двигателей Parker Hannifin была специально разработана для высокодинамичных приложений и использования с приводами переменного тока Parker Hannifin, имеющими векторное управление по замкнутому контуру, а именно: AC890, AC690+. Двигатели позволяют выполнять операции на постоянной мощности при максимальной скорости вращения до 8000 об/мин. Размеры корпуса идентичны корпусу двигателя постоянного тока с аналогичной мощностью. Уровень защиты корпуса: IP23, IP54, IP55 (опционально).
Питание: 400-460 В AC.
Тип: асинхронный.
Количество полюсов: 2 — 6.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальная мощность: 0,09 — 524 кВт.
Частота вращения: 0 — 8000 Об/мин.
Обратная связь: энкодер, резольвер (опц.).
Типоразмер: MS100, MS133, MS166, MS180, MS225, MS280; 56 — 200, 180 — 355.
Исполнение: IP23, IP54, IP55.
Особенности: Решение для широкого ряда приложений.
Коллекторные двигатели. Серия RS, RX / AXEM.
Сервомоторы серии RS — малоинерционные двигатели с магнитом из редкоземельных металлов.
Серия RX представляет собой высокоинерционные двигатели с ферритовым магнитом, которые демонстрируют высокие характеристики при работе на холостом ходу. Двигатель RX является экономически эффективным решением для различных серво-приложений. Серия RX также обеспечивает работу маломощных систем в Чистых помещениях.
Сервомоторы RS/RX постоянного тока в сочетании с приводами серии RTS полностью подходят для применений, где требуется компактное решение или высокий динамический уровень.
Двигатели серии AXEM являются одними из самых распространенных серводвигателей во всем мире — парк установленного оборудования насчитывает более 2 000 000 единиц. Сервомотор обеспечивает высокую динамику и управление на низкой скорости, а также работу без шума и вибраций. Надежное и эффективное решение с низкими эксплуатационными расходами.
Питание: 14 — 178 В DC.
Тип: коллекторный с редкоземельными магнитами / с плоским ротором.
Количество полюсов: 4 / нет.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальный ток: 1,5 — 28 А.
Частота вращения: 2000 — 4800 Об/мин.
Обратная связь: тахогенератор, энкодер, резольвер.
Типоразмер: 39, 52, 58, 68, 83, 84, 97, 100, 110, 120, 140, 160, 211, 278.
Исполнение: IP20, IP40, IP54.
Особенности: Отличное управление на низкой скорости вращения, компактность, для медицинских приложений.
Синхронный двигатель | Промышленная автоматика, оборудование и запчасти
В нашем каталоге вы можете заказать синхронные двигатели производства ведущих западных фирм, таких как: Kollmorgen, Servostar, ATB, Electro ADDA, Phyton и другие.
Синхронным называют электрический двигатель, магнитное поле ротора в котором совпадает с магнитным полем статора, или частота вращения ротора совпадает с частотой магнитного поля индуктора.
Принцип действия синхронного двигателя основывается на взаимодействии магнитных полей якоря и индуктора. Как правило якорь располагается на статоре, а индуктор соответственно на роторе. В особо мощных двигателях в роли полюсов выступают электромагниты, тогда как в слабомощных устанавливаются постоянные магниты.
Следует заметить, что применяется так же и обращённая конструкция синхронного двигателя, когда якорь располагается на роторе, а индуктор на статоре. Однако такие конструкции применялись в основном в устаревших двигателях, но существуют и конфигурации современных криогенных синхронных машин, на которых в обмотках возбуждения используют сверхпроводники.
Для запуска синхронного двигателя необходимо разогнать его до частоты, сравнимой с частотой вращения магнитного поля. При таких условиях вращающееся поле якоря сцепляется с магнитными полями полюсов индуктора и входит с ним в синхронизм.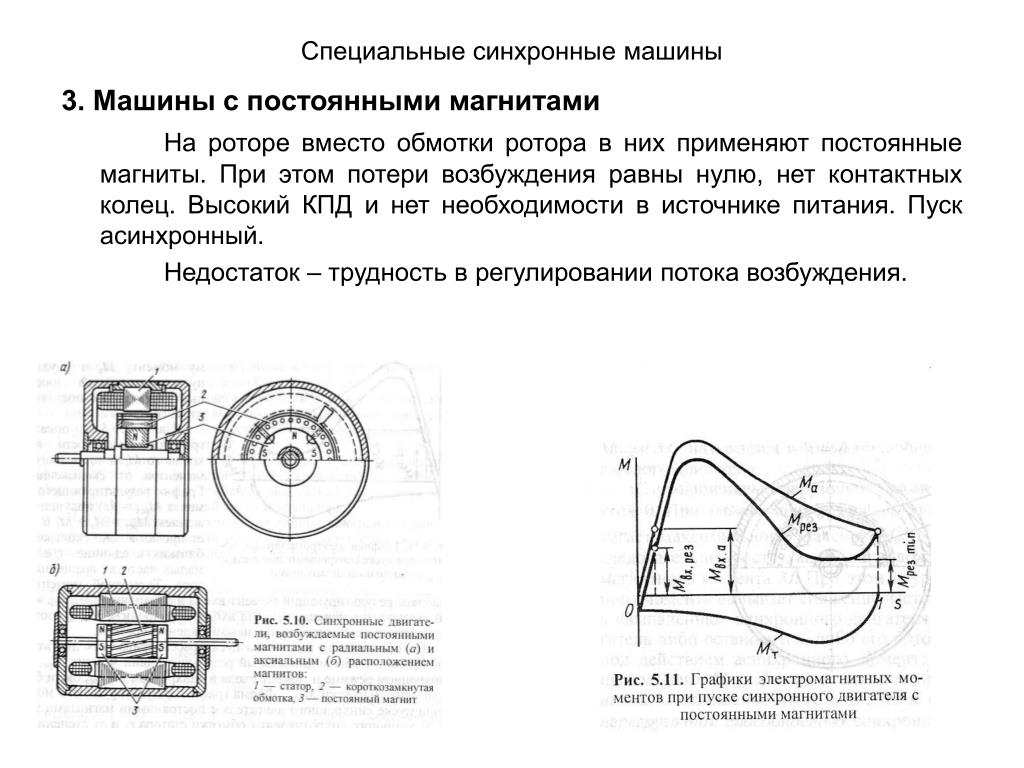
Для разгона синхронных двигателей чаще всего используют асинхронный режим, в котором обмотки индуктора замыкаются накоротко или через реостат. Для этого на роторе делают коротко замкнутую обмотку, которая выполняет также и роль успокоительной обмотки, которая помогает устранить раскачивание ротора в процессе синхронизации. После выхода на близкую к номинальной скорость индуктор запитывается постоянным током.
В синхронных двигателях на постоянных магнитах для разгона используют внешний двигатель.
На валу часто устанавливают генератор постоянного тока, питающий электромагниты.
При изменении возбуждения синхронные двигатели меняют импеданс с ёмкостного на индуктивный. Перевозбужденные двигатели на холостом ходу находят своё применение для компенсации реактивной мощности. В промышленности синхронные двигатели чаще всего применяются при единичных мощностях больше 300 кВт.
%d1%81%d0%b8%d0%bd%d1%85%d1%80%d0%be%d0%bd%d0%bd%d1%8b%d0%b9%20%d0%b4%d0%b2%d0%b8%d0%b3%d0%b0%d1%82%d0%b5%d0%bb%d1%8c%20%d1%81%20%d0%bf%d0%be%d1%81%d1%82%d0%be%d1%8f%d0%bd%d0%bd%d1%8b%d0%bc%d0%b8%20%d0%bc%d0%b0%d0%b3%d0%bd%d0%b8%d1%82%d0%b0%d0%bc%d0%b8 — с русского на все языки
Все языкиРусскийАнглийскийИспанский────────Айнский языкАканАлбанскийАлтайскийАрабскийАрагонскийАрмянскийАрумынскийАстурийскийАфрикаансБагобоБаскскийБашкирскийБелорусскийБолгарскийБурятскийВаллийскийВарайскийВенгерскийВепсскийВерхнелужицкийВьетнамскийГаитянскийГреческийГрузинскийГуараниГэльскийДатскийДолганскийДревнерусский языкИвритИдишИнгушскийИндонезийскийИнупиакИрландскийИсландскийИтальянскийЙорубаКазахскийКарачаевскийКаталанскийКвеньяКечуаКиргизскийКитайскийКлингонскийКомиКомиКорейскийКриКрымскотатарскийКумыкскийКурдскийКхмерскийЛатинскийЛатышскийЛингалаЛитовскийЛюксембургскийМайяМакедонскийМалайскийМаньчжурскийМаориМарийскийМикенскийМокшанскийМонгольскийНауатльНемецкийНидерландскийНогайскийНорвежскийОрокскийОсетинскийОсманскийПалиПапьяментоПенджабскийПерсидскийПольскийПортугальскийРумынский, МолдавскийСанскритСеверносаамскийСербскийСефардскийСилезскийСловацкийСловенскийСуахилиТагальскийТаджикскийТайскийТатарскийТвиТибетскийТофаларскийТувинскийТурецкийТуркменскийУдмуртскийУзбекскийУйгурскийУкраинскийУрдуУрумскийФарерскийФинскийФранцузскийХиндиХорватскийЦерковнославянский (Старославянский)ЧеркесскийЧерокиЧеченскийЧешскийЧувашскийШайенскогоШведскийШорскийШумерскийЭвенкийскийЭльзасскийЭрзянскийЭсперантоЭстонскийЮпийскийЯкутскийЯпонский
Все языкиРусскийАнглийскийИспанский────────АлтайскийАрабскийАрмянскийБаскскийБашкирскийБелорусскийВенгерскийВепсскийВодскийГреческийДатскийИвритИдишИжорскийИнгушскийИндонезийскийИсландскийИтальянскийКазахскийКарачаевскийКитайскийКорейскийКрымскотатарскийКумыкскийЛатинскийЛатышскийЛитовскийМарийскийМокшанскийМонгольскийНемецкийНидерландскийНорвежскийОсетинскийПерсидскийПольскийПортугальскийСловацкийСловенскийСуахилиТаджикскийТайскийТатарскийТурецкийТуркменскийУдмуртскийУзбекскийУйгурскийУкраинскийУрумскийФинскийФранцузскийЦерковнославянский (Старославянский)ЧеченскийЧешскийЧувашскийШведскийШорскийЭвенкийскийЭрзянскийЭсперантоЭстонскийЯкутскийЯпонский
асинхронный, синхронный или на постоянных магнитах?
Можно ли буксировать электромобили? Зависит от типа двигателя. Да, бывают разные. Если вы только собираетесь покупать электрокар, то знайте: до полной разрядки его лучше не доводить. И вот почему
Да, бывают разные. Если вы только собираетесь покупать электрокар, то знайте: до полной разрядки его лучше не доводить. И вот почему
Автомобили с двигателями внутреннего сгорания допускают буксировку. Если у вас механическая коробка передач, то это самое простое дело: ставите нейтраль в коробке передач или выжимаете сцепление – и ваш мотор оказывается физически отключен от колес, а машина превращается в обычную телегу: тяни не хочу.
С автоматами чуть сложнее, в них полного разрыва связи между колесами и мотором не предусмотрено. Но и они в режиме N позволяют буксировать машину на короткие расстояния и с невысокой скоростью.
Однако в инструкциях к электромобилям вы прочтете, что буксировка или не допускается вовсе, или, как в случае с современными моделями Tesla, допускается со скоростью не более 5 км/ч на расстояние не более 10 метров: иными словами, вы в праве только оттолкать сломанную машину на обочину.
А может ли быть иначе? Да, старые модели Tesla такое позволяли. Как и GM EV1 – легенда электрокаров 90-х годов прошлого века. Так в чем же дело? В типе электрических двигателей. Или, если уж говорить совсем правильно, электрических машин, так как в электромобилях эти устройства служат не только двигателями, но и генераторами. И на современных типах электрокаров встречается три типа таких устройств. Но для начала немного истории.
Как и GM EV1 – легенда электрокаров 90-х годов прошлого века. Так в чем же дело? В типе электрических двигателей. Или, если уж говорить совсем правильно, электрических машин, так как в электромобилях эти устройства служат не только двигателями, но и генераторами. И на современных типах электрокаров встречается три типа таких устройств. Но для начала немного истории.
В 1821 году британский ученый Майкл Фарадей в своей статье впервые описал основные принципы преобразования электроэнергии в движение. Фарадей уже знал, что электрический ток, проходя через проволоку, создает магнитное поле. Закрученный в катушку, такой провод становится электромагнитом.
Он также знал, что противоположные полюса магнитов притягиваются, а одинаковые – отталкиваются. В электромагнитах же полярность зависит от направления движения тока, то есть ее можно быстро менять. И вот что придумал Фарадей. Берем магнит, который движется к другому. В последний момент полярность меняется, но рядом расположен третий магнит, к которому можно тянуться. Затем четвертый, пятый. Эти разнополярные магниты выстроены в линию. И если ее закольцевать, движение будет идти по кругу до тех пор, пока сквозь электромагниты идет ток и пока его направление не перестает меняться.
Затем четвертый, пятый. Эти разнополярные магниты выстроены в линию. И если ее закольцевать, движение будет идти по кругу до тех пор, пока сквозь электромагниты идет ток и пока его направление не перестает меняться.
Чтобы понять, как это действует, представьте, что у вас в руках два школьных магнита в форме подковы или буквы U – помните, были такие. Если их повернуть друг к другу взаимоотталкивающимися полюсами, то они будут стремиться сделать полуоборот, чтобы снова друг к другу притянуться. А теперь представьте, что их полюса постоянно меняются местами: тогда они станут вертеться друг относительно друга. Это и есть электродвигатель.
Так впервые был описан принцип действия всех электромоторов в целом и самого древнего в частности: того, который работает от постоянного тока и использует с одной стороны постоянные магниты из намагниченного сплава, а с другой – переменные электромагниты. Это наш первый герой: мотор-генератор постоянного тока на перманентных магнитах.
Изобретения Фарадея были развиты его полседователями, в частности изобретателем электрической лампочки Томасом Эдисоном. Эдисон усовершенствовал генераторы постоянного тока и стал пионером в электрификации Нью-Йорка. В 1884 году на пороге его кабинета появился молодой сербский инженер. Звали иммигранта Никола Тесла.
Эдисон усовершенствовал генераторы постоянного тока и стал пионером в электрификации Нью-Йорка. В 1884 году на пороге его кабинета появился молодой сербский инженер. Звали иммигранта Никола Тесла.
Тесла предложил улучшить конструкцию Эдисона и попросил за работу 50 тысяч долларов – баснословная в те времена сумма. По легенде Эдисон согласился, но когда Тесла действительно существенно улучшил существующую модель, любимец Америки просто кинул безвестного сербского эмигранта.
Тесла рассердился и отправился к главному конкуренту, адепту переменного тока Джорджу Вестингаузу. Так началась «Война токов», окончательно проигранная постоянным током только в 2007 году, когда Нью-Йорк последним из городов перешел на ток переменный.
Генераторы Эдисона вырабатывали электричество с напряжением, близким к потребительскому: 100-200 вольт. Это удобно для домов, но его сложно передавать на большие расстояния из-за сопротивления проводов. Тут было два решения: увеличивать диаметр кабелей или повышать напряжение. Первый вариант позволял делать линии длинной 1,5 километра. Да, совсем немного. Второй вариант был невозможен из-за отсутствия в те годы эффективных способов повышения напряжения постоянного тока.
Первый вариант позволял делать линии длинной 1,5 километра. Да, совсем немного. Второй вариант был невозможен из-за отсутствия в те годы эффективных способов повышения напряжения постоянного тока.
Однако еще в 1876 году русский ученый Павел Яблочков изобрел трансформатор, меняющий напряжение переменного тока. Подача энергии на большие расстояния перестала быть проблемой.
Но была другая проблема. Лампочкам Эдисона все равно от какого тока питаться: постоянного или переменного. А вот с электродвигателями сложнее: они в те годы требовали только постоянного. В 1888 году Тесла запатентовал в США асинхронный электрический двигатель переменного тока. Он же изобрел и синхронный генератор, впоследствии использованный и как двигатель. Это второй и третий герои нашей статьи.
Так поговорим же о них поподробнее
Если в детстве вам доводилось разбирать игрушечные электрические машинки, то вы должны помнить устройство их простейших двигателей. Для остальных напомним. Все применяемые в электромобилях моторы состоят из двух частей: неподвижного статора и вращающегося ротора.
В игрушечных машинах на статоре стоят постоянные магниты, а на роторе – электрические переменные. При вращении на них через специальные щетки подается постоянный ток от батареек, и их последовательное включение и обеспечивает движение.
Похожая конструкция встречается практически у всех электромобилей. С одним отличием: на роторе там стоят постоянные магниты, а на статоре, напротив, электрические и переменные. Так в том числе можно избавиться от щеток: одного из немногих элементов электродвигателя, который подвержен износу.
Преимущество моторов на постоянных машинах в том, что они легкие, компактные, мощные, эффективные, работают от вырабатываемого аккумуляторами постоянного тока… так, стоп! А какие недостатки?
Недостаток прост. Таким моторам не хватает тяги. Так перейдем же к асинхронным инверсионным моторам переменного тока.
Бородатый анекдот про умирающего мастера заваривать чай, который делился своим секретом словами «не жалейте заварки» – это прям притча про компанию Tesla. Вопреки расхожему мнению, ее основал не Илон Маск (он позже стал главным инвестором и владельцем), а Мартин Эберхард и его партнер Марк Тарпенинг.
Вопреки расхожему мнению, ее основал не Илон Маск (он позже стал главным инвестором и владельцем), а Мартин Эберхард и его партнер Марк Тарпенинг.
Эти двое придумали немыслимое. Создать не тихоходный, эффективный и относительно дешевый электрокар, а дорогой, быстрый и клевый. Маск же первым идею оценил и быстро прибрал ее к рукам.
Имя компании Tesla не случайно. Одной из ее технических революций стало использование асинхронного двигателя без постоянных магнитов, работающего на переменном токе – того самого, который изобрел Никола Тесла. Эта конструкция дороже как сама по себе, так и благодаря необходимости в установке преобразователя постоянного тока от батареи в переменный для электродвигателя. Успешное решение данной задачи и стало первым из множества теперь уже легендарных прорывов «Теслы».
Благодаря мощному асинхронному мотору электрокары Tesla с самого начала были очень динамичным, что стало ключевой причиной роста их популярности. В таком моторе переменный ток в обмотке статора создает вращающееся магнитное поле. Оно вызывает индукцию в роторе, заставляя его вращаться чуть медленнее, чем вращение самого поля – поэтому двигатель и называется асинхронным. Если скорости вращения синхронизируются, поле перестает создавать в роторе индукцию, и он начинает замедляться, рассинхронизируясь обратно. Важно заметить, что собственно на ротор никакого электричества напрямую не подается.
Оно вызывает индукцию в роторе, заставляя его вращаться чуть медленнее, чем вращение самого поля – поэтому двигатель и называется асинхронным. Если скорости вращения синхронизируются, поле перестает создавать в роторе индукцию, и он начинает замедляться, рассинхронизируясь обратно. Важно заметить, что собственно на ротор никакого электричества напрямую не подается.
Итак, есть еще третий тип электрического двигателя, который встречается в современных электромобилях: синхронный на электромагнитах. Он похож по устройству на двигатели с постоянными магнитами на роторе, только эти магниты – электрические. На них подается постоянный ток, так что полярность магнитов ротора остается неизменной. А вот полярность магнитов статора, напротив, меняется, что и обеспечивает вращение.
Такие синхронные моторы на электромагнитах славятся своей способностью обеспечивать стабильность оборотов и ставятся, обычно, на всякие установки вроде насосов. А еще… на электрокар Renault Zoe. Зачем? Честно сказать, найти быстрый ответ на этот вопрос не получилось. Можем лишь предположить, что это связано с лучшей способностью такого двигателя служить генератором, рекуперируя энергию торможения. Мотор на Zoe не самый мощный, а мощным генератором он быть обязан.
Можем лишь предположить, что это связано с лучшей способностью такого двигателя служить генератором, рекуперируя энергию торможения. Мотор на Zoe не самый мощный, а мощным генератором он быть обязан.
Так что же лучше? Большинство автоконцернов выбирает моторы на постоянных магнитах: они эффективнее. Tesla в первые годы настаивала на асинхронных моторах. Но потом… сделала ставку на двух моторную полнопривродную схему, в которой асинхронный мотор обеспечивает динамику, а двигатель на постоянных магнитах гарантирует низкий расход энергии при небольших нагрузках. И только Renault… ну вы поняли.
А теперь о том, что ждет нас дальше. При буксировке даже обесточенный двигатель на постоянных магнитах тут же начинает работать как генератор, что чревато перегревом и возгоранием энергосистемы электромобиля. В синхронных моторах Renault оставшейся магнетизм в роторе также способен вызвать индукцию в катушках статора, ну и пошло поехало – генерация тока, перегрев, пожар.
И только асинхронные двигатели, когда их статоры не под напряжением, не являются генераторами: их можно буксировать.
Так вот, современная тенденция такова. Моторы на постоянных магнитах становятся все мощнее и тяговитее, оставаясь самыми эффективными. Производители постепенно переходят на них. Но придумать, как машины с ними безопасно буксировать инженерам еще предстоит. Пока они декларируют принцип «Наши электромобили не ломаются и в буксировке не нуждаются». Но звучит не больно убедительно.
Синхронный двигатель
Синхронный электродвигатель — это электродвигатель переменного тока, в котором в установившемся режиме [ 1] вращение вала синхронизировано с частотой питающего тока ; период вращения точно равен целому числу циклов переменного тока . Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя, которые создают магнитное поле , которое вращается в такт колебаниям сетевого тока. Ротор _с постоянными магнитами или электромагнитами вращается синхронно с полем статора с той же скоростью и в результате обеспечивает второе синхронизированное вращающееся магнитное поле любого двигателя переменного тока. Синхронный двигатель называется синхронным с двойным питанием , если он снабжен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре.
Синхронный двигатель называется синхронным с двойным питанием , если он снабжен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре.
Синхронный двигатель и асинхронный двигатель являются наиболее широко используемыми типами двигателей переменного тока. Разница между этими двумя типами заключается в том, что синхронный двигатель вращается со скоростью, привязанной к частоте сети, поскольку он не зависит от индукции тока для создания магнитного поля ротора. Напротив, асинхронный двигатель требует скольжения : ротор должен вращаться немного медленнее, чем переменный ток, чтобы индуцировать ток в обмотке ротора. Небольшие синхронные двигатели используются в устройствах синхронизации, таких как синхронные часы , таймеры в бытовой технике, магнитофоны и прецизионные сервомеханизмы , в которых двигатель должен работать с точной скоростью; точность скорости соответствуетчастота линии электропередач , которая тщательно контролируется в крупных взаимосвязанных энергосистемах.
Доступны синхронные двигатели с самовозбуждением мощностью от долей лошадиных сил [2] до мощных промышленных размеров. [1] В диапазоне долей мощности большинство синхронных двигателей используются там, где требуется точная постоянная скорость. Эти машины обычно используются в аналоговых электрических часах, таймерах и других устройствах, где требуется точное время. В более мощных промышленных размерах синхронный двигатель выполняет две важные функции. Во-первых, это высокоэффективное средство преобразования энергии переменного тока в работу. Во- вторых, он может работать с опережающим или единичным коэффициентом мощности и, таким образом, обеспечивать коррекцию коэффициента мощности.
Синхронные двигатели относятся к более общей категории синхронных машин , в которую также входит синхронный генератор. Действие генератора будет наблюдаться, если полюса поля «приводятся в движение впереди результирующего потока в воздушном зазоре за счет поступательного движения первичного двигателя ». Действие двигателя будет наблюдаться, если полюса поля «тянутся за результирующим потоком воздушного зазора под действием тормозящего момента нагрузки на валу ». [1]
Действие двигателя будет наблюдаться, если полюса поля «тянутся за результирующим потоком воздушного зазора под действием тормозящего момента нагрузки на валу ». [1]
Существует два основных типа синхронных двигателей в зависимости от того, как намагничивается ротор: без возбуждения и с возбуждением от постоянного тока . [3]
В двигателях без возбуждения ротор выполнен из стали. На синхронной скорости он вращается в ногу с вращающимся магнитным полем статора, поэтому через него проходит почти постоянное магнитное поле. Внешнее поле статора намагничивает ротор, индуцируя магнитные полюса, необходимые для его вращения. Ротор изготовлен из стали с высокой сохраняющей способностью, такой как кобальтовая сталь. Они изготавливаются в конструкциях с постоянным магнитом , сопротивлением и гистерезисом : [4]
| Наименование показателя | Описание показателя | ||
| Входные данные | Номинальное напряжение, частота | 3-фаз. 380В 50Гц/60Гц 380В 50Гц/60Гц | |
| Номинальное напряжение, частота | 320В~460В | ||
| Выходные данные | Напряжение | 0~380В | |
| Частота | 0Гц-600Гц | ||
| Допустимая перегрузка | 150% от номинального тока в течение 1 минуты,180% от номинального тока в течение 1 секунды | ||
| Характеристики управления | Тип двигателя | Синхронный двигатель с постоянными магнитами, асинхронный двигатель | |
| Режим управления | Синхронный двигатель: без векторного управления PG, векторное управление PG. Асинхронный двигатель: без векторного управления PG, регулирование Н/Ч с разомкнутым контуром | ||
| Диапазон регулировки скорости | Синхронный двигатель: 1: 20 (без датчика скорости векторного управления), 1: 1000 (векторное управление с датчиком скорости) Асинхронный двигатель: 1: 100 (без датчика скорости векторного управления) | ||
| Пусковой крутящий момент | Синхронный двигатель: 2,5 Гц: 150% от номинального крутящего момента (без датчика скорости векторного управления) 0 Гц: 180% от номинального крутящего момента (векторное управление с датчиком скорости) Асинхронный двигатель: 0,5 Гц: 150% от номинального крутящего момента (без датчика скорости векторного управления) | ||
| Точность управления крутящим моментом | ±10% | ||
| Точность управления скоростью вращения | Синхронный двигатель: ≤ ± 0,3% от номинальной синхронной скорости (без датчика скорости векторного управления) ≤ ± 0,03% от номинальной синхронной скорости (векторное управление с датчиком скорости) Асинхронный двигатель: ≤ ± 0,5% от номинальной синхронной скорости (без датчика скорости векторного управления) | ||
| Колебание скорости | Синхронный двигатель: ≤ ± 0,3% от номинальной синхронной скорости (безатчика скорости векторного управления) ≤ ± 0,03% от номинальной синхронной скорости (векторное управление с датчиком скорости) Асинхронный двигатель: ≤ ± 0,5% от номинальной синхронной скорости (безатчика скорости векторного управления) | ||
| Точность частоты | Цифровая настройка: макс. частота × ±0.01%; Аналоговая настройка: макс. частота × ±0.5% частота × ±0.01%; Аналоговая настройка: макс. частота × ±0.5% | ||
| Разрешение по частоте | Аналоговая настройка | 0.1% от макс. частоты | |
| Цифровая настройка | < 100 Гц: 0.01Гц | ||
| Внешний импульс | 0.1% от макс. частоты | ||
| Увеличение крутящего момента | Автоматическое увеличение крутящего момента; ручное увеличение крутящего момента 0.1~12.0% | ||
| Кривая Н/Ч (Частотная и вольтовая характеристика) | Номинальная частота произвольно задается пользователем в диапазоне 5 ~ 600 Гц, можно выбрать постоянный крутящий момент, дегрессивный крутящий момент 1, дегрессивный крутящий момент 2, дегрессивный крутящий момент 3, показатель Н/Ч определяется пользователем на основе 5 видов кривой | ||
| Кривая ускорения и торможения | 2 режима: прямолинейное замедление и ускорение и замедление и ускорение по S-кривой; 15 видов замедление и ускорение, единица времени (0,01 с, 0,1 с, 1 с) может быть опциональной, макс. время 1000 минут. время 1000 минут. | ||
| Тормозной механизм | Динамическое торможение | При необходимости, можно добавить тормозной резистор между (+) и PB | |
| Торможение с постоянным током | Запуск, остановка — на выбор, частота действия 0~15 Гц, ток действия 0~100% от номинального тока, время действия 0~30.0 сек. | ||
| Толчковая подача | Диапазон толчковой частоты: от 0 Гц до максимальной предельной частоты; ускорение и замедление толчковой подачи от 0,1 до 6000,0 секунд (задается). | ||
| Многоступенчатая скоростная работа | Реализуется встроенным ПЛК или управляющим терминалом; С 15-секционной скоростью, каждая секционная скорость имеет отдельное время разгона и торможения; Со встроенным ПЛК система может уходить в режим сна при выключении питания. | ||
| Встроенный ПИД-контроллер | Удобен для создания замкнутой системы управления. | ||
| Автоматическое функционирование в режиме энегросбережения | Происходит автоматическая оптимизация кривой Н/Чдля активации энергосберегающего режима в соответствии с состоянием нагрузки. | ||
| Автоматический регулятор напряжения (AVR) | При колебании напряжения в электросети происходит автоматическое выравнивание выходного напряжения до постоянного уровня. | ||
| Автоматическое ограничение тока | Чтобы избежать частого отключения инвертора из-за чрезмерного тока, в рабочем режиме действует автоматический режим ограничения тока. | ||
| Модуляция несущей частоты | Модуляция несущей частоты происходит автоматически в соответствии с характеристикой нагрузки. | ||
| Перезапуск отслеживания скорости | Плавный пуск роторного двигателя. | ||
Сравнение асинхронных двигателей переменного тока
и синхронных двигателей с постоянными магнитами
*Изображение предоставлено New Energy and Fuel. com
com
Авторы : Стив Бистак, региональный менеджер по продажам — Северная Каролина, отдел приводов переменного тока / HMI, Fuji Electric Corp. of America, и Сунь Ю. Ким (Шон), старший региональный менеджер, ACDR/HMI, Fuji Electric Corp of America
Большинство насосов и вентиляторов, работающих в промышленных и коммерческих целях, в настоящее время приводятся в действие асинхронными двигателями переменного тока.«ACIM», что означает «асинхронный двигатель переменного тока», представляет собой асинхронный тип двигателя, который использует электрический ток для вращения ротора. Крутящий момент создается электрическим током в роторе. Электрический ток генерируется за счет электромагнитной индукции из магнитного поля обмоток статора. В ACIM ротор всегда вращается с меньшей скоростью, чем магнитное поле. «PMSM», что означает «синхронный двигатель с постоянными магнитами», использует магниты для вращения ротора, который вращается с той же скоростью, что и внутреннее вращающееся магнитное поле PMSM.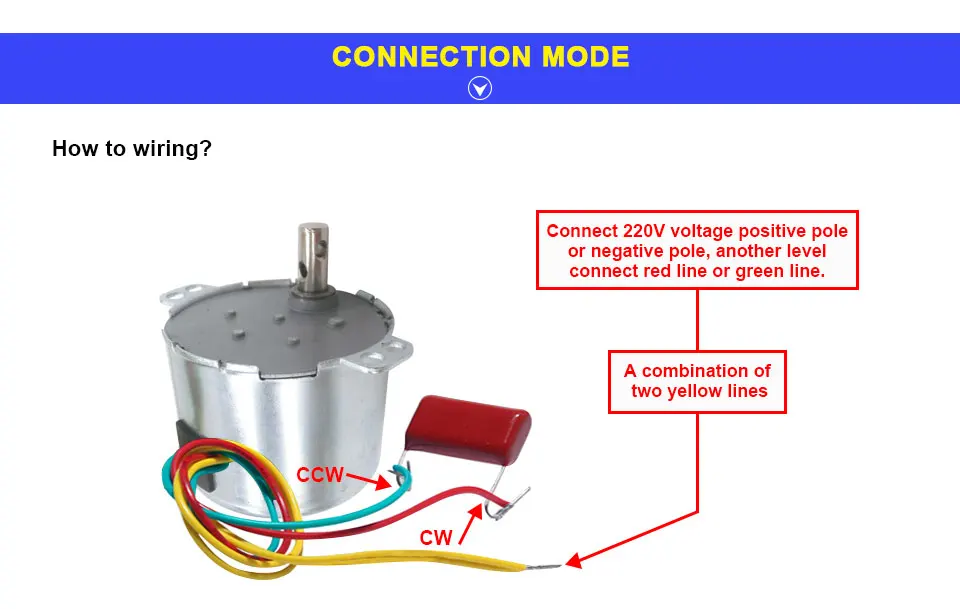
Существует несколько ключевых различий между асинхронными двигателями переменного тока и синхронными двигателями с постоянными магнитами.
Двигатели с постоянными магнитами ДОЛЖНЫ работать с приводом.
Асинхронные двигатели переменного тока
могут использоваться без ЧРП для привода насоса или вентилятора, но часто устанавливаются с частотно-регулируемыми приводами (ЧРП) в насосных системах или системах вентиляторов, чтобы повысить эффективность системы. Для работы синхронных двигателей с постоянными магнитами требуется привод. PMSM не может работать без привода.ЧРП требуется для точного управления скоростью СДПМ в соответствии с требованиями приложения по давлению, расходу, объему и т. д. Некоторые новые ЧРП уже поставляются с опциями управления двигателем с постоянными магнитами в качестве стандартной функции, что позволяет операторам управлять двигателем с постоянными магнитами. для более эффективного привода вентилятора и/или насоса.
Двигатели с постоянными магнитами обеспечивают значительное повышение эффективности по сравнению с асинхронными двигателями переменного тока.
КПД двигателя с постоянными магнитами при полной нагрузке выше, чем у асинхронного двигателя переменного тока.На рисунке 1 ниже показаны диапазоны эффективности между двумя стандартами асинхронных двигателей переменного тока и известными опубликованными двигателями с постоянными магнитами.
Рисунок 1 . КПД двигателя с постоянными магнитами по мощности частотно-регулируемого привода. ACIM на синусоиде. Двигатели ACIM теряют от 0,5 до 1,5 балла эффективности при работе от частотно-регулируемого привода.
Важно отметить, что частотно-регулируемые приводы не повышают КПД двигателя; ЧРП помогают повысить эффективность системы в диапазоне рабочих скоростей, поскольку большинство систем не работают постоянно на максимальной скорости.Добавление частотно-регулируемого привода повышает эффективность вашей системы, поскольку он может замедлять двигатель и вентилятор или насос, а не поворачивать клапан, чтобы дросселировать насос, или закрывать заслонку, чтобы блокировать поток воздуха.
Взгляните на рис. 2, на котором 10-сильный синхронный двигатель с постоянными магнитами со скоростью вращения 1800 об/мин сравнивается с двигателем NEMA Premium, работающим с нагрузкой с переменным крутящим моментом в диапазоне скоростей от 3 до 1. Вы можете видеть, что в обоих случаях КПД обоих типов двигателей падает. КПД NEMA Premium Motor падает с 90% до 72% при 600 об/мин, а ECPM падает с 94% до 83%.Хотя работа системы влияет на эффективность оборудования, было доказано, что двигатели с постоянными магнитами демонстрируют более высокий КПД по сравнению с асинхронными двигателями переменного тока.
Рисунок 2 . Сравнение относительной эффективности двигателей PMSM и ACIM с динамическим диапазоном 3:1.
Преимущества и недостатки двигателей с постоянными магнитами
Хотя асинхронные двигатели переменного тока чаще используются в системах с электроприводом, они часто больше по размеру и менее эффективны, чем решения с двигателями с постоянными магнитами. Хотя решения для двигателей с постоянными магнитами, как правило, имеют более высокую начальную стоимость, они могут предлагать меньшие размеры для более компактных механических блоков и, что более важно, более высокую эффективность.
Хотя решения для двигателей с постоянными магнитами, как правило, имеют более высокую начальную стоимость, они могут предлагать меньшие размеры для более компактных механических блоков и, что более важно, более высокую эффективность.
Двигатели с постоянными магнитами, как правило, дороже, чем асинхронные двигатели переменного тока, и известно, что их сложнее запустить, чем асинхронные двигатели переменного тока. Однако преимущества двигателей с постоянными магнитами включают в себя более высокий КПД (как обсуждалось выше), меньшие размеры (двигатели с постоянными магнитами могут составлять до одной трети размеров большинства двигателей переменного тока, что значительно упрощает установку и обслуживание) и способность СДПМ поддерживать полный крутящий момент на низких скоростях.
Тенденция меняется
Использование СДПМ в сочетании с частотно-регулируемым приводом не является чем-то новым; однако инженеры-конструкторы и владельцы оборудования начинают устанавливать больше двигателей с постоянными магнитами для вентиляторов и насосов из-за их меньшего размера и более высокой эффективности.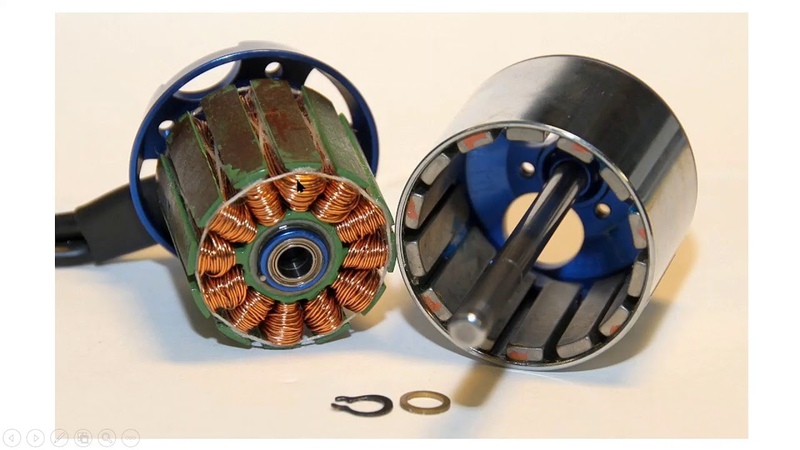 До этого момента частотно-регулируемым приводам требовалась специальная формула для привода двигателя с постоянными магнитами; теперь на рынке доступно несколько новых частотно-регулируемых приводов, которые имеют встроенную стандартную функцию для управления двигателями с постоянными магнитами без дополнительных затрат.
До этого момента частотно-регулируемым приводам требовалась специальная формула для привода двигателя с постоянными магнитами; теперь на рынке доступно несколько новых частотно-регулируемых приводов, которые имеют встроенную стандартную функцию для управления двигателями с постоянными магнитами без дополнительных затрат.
Поскольку все больше производителей VFD начинают добавлять функции для более эффективного управления PMSM, владельцы и операторы будут устанавливать системы двигателей, которые работают более эффективно, в меньших размерах и с меньшими затратами.
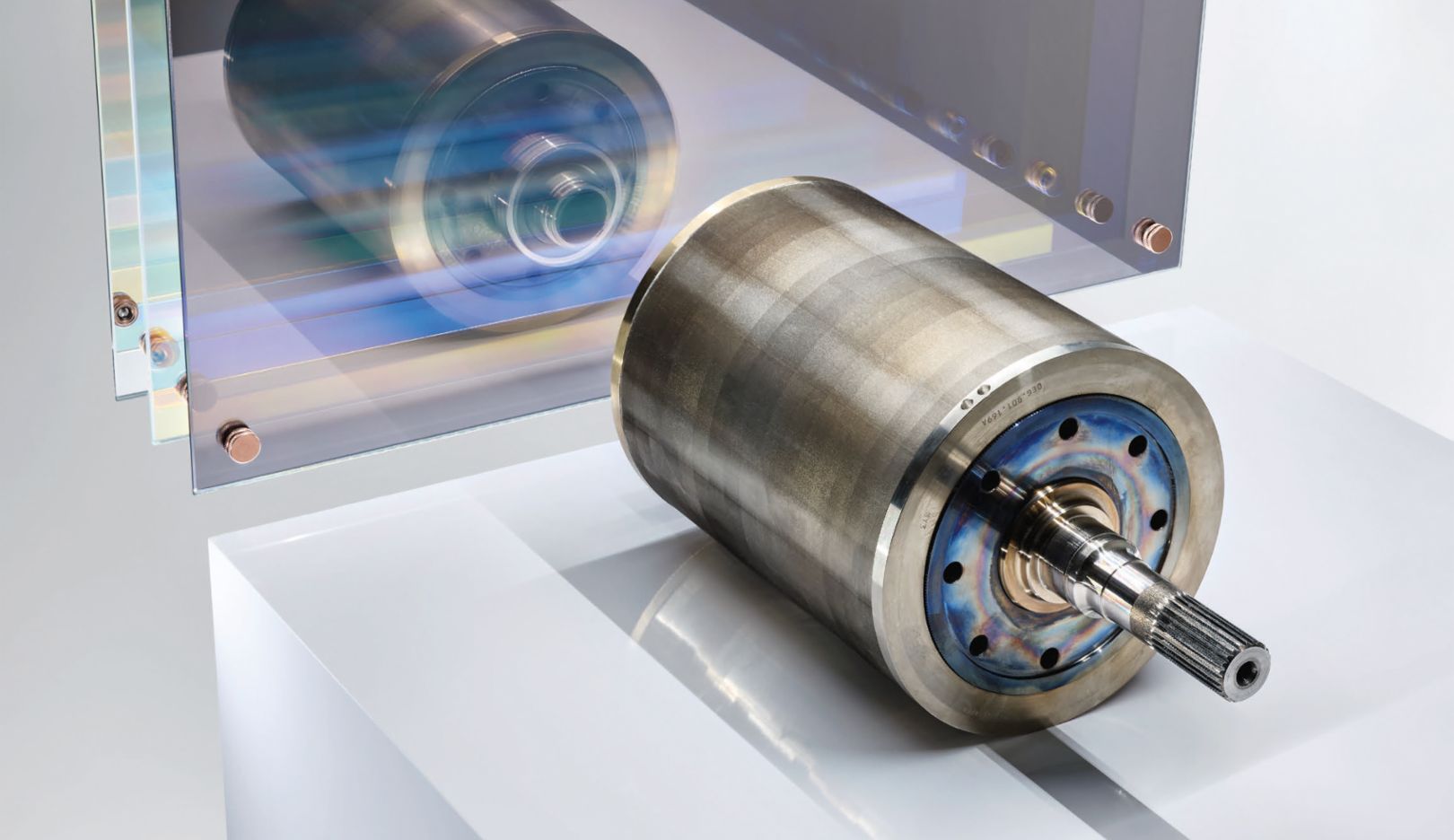
Синхронные двигатели с постоянными магнитами: типы и принципы работы
Синхронный двигатель с постоянными магнитами (СДПМ) представляет собой синхронный двигатель переменного тока, возбуждение поля которого обеспечивается постоянными магнитами. Синхронные двигатели с постоянными магнитами очень эффективны, бесщеточные, очень быстрые, безопасные и обеспечивают высокие динамические характеристики.Благодаря своим преимуществам синхронные двигатели постоянного тока имеют множество применений и находят применение в нескольких областях. Подпишитесь на этот новый блог в Linquip, чтобы узнать больше о синхронных двигателях с постоянными магнитами.
Подпишитесь на этот новый блог в Linquip, чтобы узнать больше о синхронных двигателях с постоянными магнитами.
Что такое синхронный двигатель с постоянными магнитами?
Синхронный двигатель с постоянными магнитами (СДПМ) является бесщеточным и отличается очень высокой надежностью и эффективностью. Благодаря ротору с постоянными магнитами он также имеет высокий крутящий момент при небольшом размере корпуса и отсутствии тока ротора. Вместо использования обмотки для ротора установлены постоянные магниты для создания вращающегося магнитного поля.Поскольку нет источника постоянного тока, эти типы двигателей очень просты и дешевле. Синхронные двигатели с постоянными магнитами представляют собой синхронные двигатели переменного тока, возбуждение поля которых обеспечивается постоянными магнитами и имеет синусоидальную форму обратной ЭДС. Постоянные магниты позволяют СДПМ создавать крутящий момент при нулевой скорости. Этот двигатель обеспечивает высокоэффективную работу и требует инвертора с цифровым управлением.
Конструкция
Синхронные двигатели с постоянными магнитами, как и любой вращающийся электродвигатель, состоят из ротора и статора.Конструкция синхронного двигателя с постоянными магнитами аналогична конструкции базового синхронного двигателя, но отличается только ротором. В этом типе двигателя постоянные магниты установлены на роторе, а ротор не имеет обмотки возбуждения.
Постоянные магниты используются для создания полюсов поля. Постоянные магниты, используемые в двигателе, состоят из самария-кобальта и меди, железа и бора из-за их более высокой проницаемости. Наиболее широко используемым постоянным магнитом является неодим-бор-железо из-за его эффективной стоимости и доступности.
Принцип работы
Принцип работы синхронных двигателей с постоянными магнитами аналогичен принципу работы синхронного двигателя. Принцип действия основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Это зависит от вращающегося магнитного поля, которое генерирует электродвижущую силу с синхронной скоростью.
Когда на обмотку статора подается напряжение трехфазного питания, между воздушными зазорами создается вращающееся магнитное поле.Это создает крутящий момент, когда полюса поля ротора удерживают вращающееся магнитное поле с синхронной скоростью, и ротор вращается непрерывно. Поскольку эти двигатели не являются самозапускающимися, необходимо предусмотреть источник питания с переменной частотой.
Характеристики
- Отсутствие искр, безопасность во взрывоопасных средах
- Чистый, быстрый и эффективный
- Более компактный, эффективный и легкий, чем ACIM
- Предназначен для высокопроизводительных сервоприводов
- датчики положения
- Низкий уровень шума и электромагнитных помех
- Плавная работа на низких и высоких скоростях
- Обеспечивает оптимальный крутящий момент в сочетании с полевым управлением (FOC)
Типы
В зависимости от того, как магниты прикреплены к ротору и По конструкции ротора синхронный двигатель с постоянными магнитами можно разделить на два типа:
- Синхронный двигатель с постоянными магнитами с поверхностным расположением магнитов (SPMSM)
- Синхронный двигатель с внутренними постоянными магнитами (IPSMM).

SPMSM устанавливает все части магнита на поверхность, а IPMSM помещает магниты внутрь ротора.
Также, в зависимости от конструкции статора, синхронный двигатель с постоянными магнитами может быть:
- С распределенной обмоткой
- С сосредоточенной обмоткой
Управление синхронным двигателем с постоянными магнитами
Поскольку синхронные двигатели с постоянными магнитами должны быть синусоидальные формы сигналов, сложность управления возрастает.Для синхронного двигателя с постоянными магнитами требуется система управления, например частотно-регулируемый привод или сервопривод. Существует большое количество методов управления, реализованных системами управления. Выбор оптимального метода управления в основном зависит от задачи, которая ставится перед электроприводом. Для решения простых задач обычно используется трапециевидное управление с датчиками Холла. Для решения задач, требующих от электропривода максимальной производительности, обычно выбирают полеориентированное управление.
Преимущества
Преимущества синхронного двигателя с постоянными магнитами:
- Динамические характеристики как на высоких, так и на низких скоростях
- Высокая удельная мощность
- Малая инерция ротора облегчает управление
- Отсутствие пульсаций крутящего момента при коммутируется
- Высокий и плавный крутящий момент
- Высокий КПД на высоких скоростях
- Износостойкий
- Доступен в небольших размерах в различных упаковках
- Простота обслуживания и установки
- Возможность поддержания полного крутящего момента на низких скоростях
- 1 Надежность
- Эффективное рассеивание тепла
- Менее шумные
Недостатки
Недостатки синхронных моторов на магнитных магнитах составляет
- Высокая начальная стоимость
- Очень дорогим
- Трудно запустить, потому что это не самостоятельный мотор
Приложения
Постоянные магнитные синхронные моторы приложения представляют собой
- Кондиционеры
- Холодильники
- Compressers AC
- Стиральные машины с прямым приводом
- Автомобильная электрическая электрическая мощность Рулевое управление
- Станки
- Контроль тяги
- Устройства данных
- Сервоприводы
- Трансмиссия электромобиля
- Крупные энергетические системы для улучшения коэффициента опережающей и отстающей мощности
- Промышленные применения, такие как робототехника, аэрокосмическая промышленность и многие другие.

Итак, вот и весь обзор синхронных двигателей с постоянными магнитами. Если вам понравилась эта статья в Linquip, дайте нам знать, оставив ответ в разделе комментариев. Есть ли какие-либо вопросы, с которыми мы можем вам помочь? Не стесняйтесь зарегистрироваться на нашем сайте, чтобы получить самую профессиональную консультацию от наших специалистов.
Синхронный двигатель с постоянными магнитами и синусоидальным магнитным потоком
распределение
Описание
Блок СДПМ моделирует синхронный
двигатель с трехфазным статором, соединенным звездой.На рисунке показан эквивалентный электрический
схема обмоток статора.
Вы можете выбрать различные встроенные параметры для этого блока. Для большего
информацию см. в разделе Предопределенная параметризация.
Конструкция двигателя
На этом рисунке показана конструкция двигателя с одной парой полюсов на роторе.
Постоянные магниты генерируют магнитное поле ротора, которое создает синусоидальную скорость
изменения потока с углом ротора.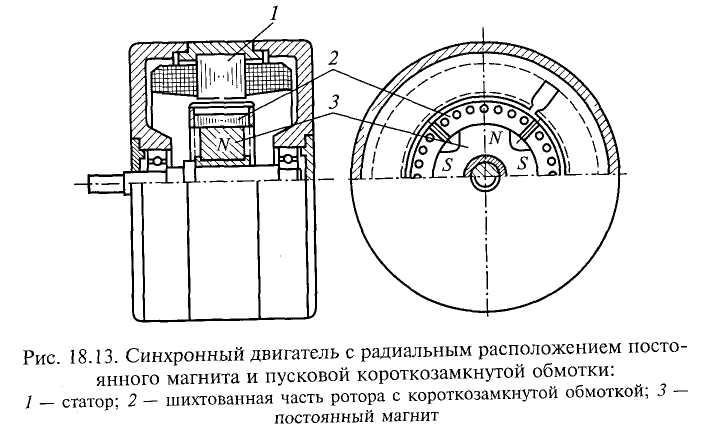
Для обозначения осей на предыдущем рисунке фаза a
и потоки постоянных магнитов выравниваются, когда механический угол ротора,
θ r , равно нулю. Блок поддерживает
второе определение оси ротора, в котором механический угол ротора определяется как угол
между и -фазной магнитной осью и ротором
q -ось.
Уравнения
Напряжения на обмотках статора определяются по формуле:
где:
v а ,
v б и
v c индивидуальные
фазные напряжения на обмотках статора.R s эквивалентное сопротивление
каждой обмотки статора.и и ,
и б и
i c токи
течет в обмотках статора.dψadt, dψbdt и dψcdt — скорости изменения магнитного потока в каждом статоре.
обмотка.

Постоянный магнит и три обмотки вносят вклад в общую магнитную связь
каждой обмотки. Общий поток определяется как:
где:
ψ a ,
ψ б и
ψ c – суммарные потоки
соединение каждой обмотки статора.л аа ,
л бб и
L куб.см
собственные индуктивности обмоток статора.л аб ,
л ак ,
L ba и т.д.
взаимные индуктивности обмоток статора.ψ утра ,
ψ бм и
ψ см постоянные
магнитные потоки, связывающие обмотки статора.
Индуктивность в обмотках статора зависит от электрического угла ротора,
определяется:
и
где:
θ r — механический ротор
угол.θ e ротор электрический
угол.смещение ротора равно
0, если вы определяете
электрический угол ротора относительно оси d, или
-pi/2, если вы задаете электрический угол ротора с помощью
относительно оси q.L s — самоиндукция статора
на фазу. Это значение является средней собственной индуктивностью каждого из статоров.
обмотки.L m — индуктивность статора
колебания. Эта величина представляет собой флуктуацию собственной индуктивности и взаимной индуктивности.
индуктивность при изменении угла ротора.М с статор взаимный
индуктивность.Это значение представляет собой среднюю взаимную индуктивность между статором
обмотки.
 Это значение является средней собственной индуктивностью каждого из статоров.
Это значение является средней собственной индуктивностью каждого из статоров. Обмотка потокосцепления постоянного магнита a является максимальной, когда
θ e = 0° и ноль, когда
θ и = 90°. Следовательно
связанный поток двигателя определяется как:
, где ψ м — поток постоянного магнита
связь.
Упрощенные электрические уравнения
Применение преобразования Парка к блочным электрическим уравнениям дает
выражение для крутящего момента, не зависящего от угла поворота ротора.
Преобразование Парка определяется следующим образом:
, где θ e — определяемый электрический угол
как Nθ р . N это номер
пар полюсов.
Использование преобразования Парка на преобразованиях напряжения и тока обмотки статора
их в кадр dq0, который не зависит от угла ротора:
и
Применение преобразования Парка к первым двум электрическим уравнениям дает
следующие уравнения, определяющие поведение блока:
и
где:
L d =
л с +
М с + 3/2
л м . L d статор
d -осевая индуктивность.L q =
л с +
М с − 3/2
л м .
L q статор
q — осевая индуктивность.Л 0 =
л с –
2 М с .
L 0 — статор
индуктивность нулевой последовательности.ω — механическая скорость вращения ротора.
N — номер полюса постоянного магнита ротора
пары.T — крутящий момент ротора. Крутящий момент течет от корпуса двигателя
(заблокируйте физический порт C) к ротору двигателя (заблокируйте физический порт R).

В блоке PMSM используется исходный неортогональный
реализация преобразования Парка. Если вы попытаетесь применить альтернативу
реализации вы получите разные результаты для напряжения и тока dq0.
Альтернативная параметризация потокосцепления
Вы можете параметрировать двигатель, используя противо-ЭДС или константы крутящего момента, которые
чаще указывается в технических описаниях двигателей с использованием потока постоянного магнита .
рычажный вариант .
Постоянная противоЭДС определяется как пиковое напряжение, индуцированное постоянным
магнита в каждой из фаз на единицу скорости вращения. Это связано с пиком
потокосцепление с постоянными магнитами по:
Из этого определения следует, что противо-ЭДС
e ph для одной фазы указано
по:
Константа крутящего момента определяется как пиковый крутящий момент, создаваемый каждой из фаз
на единицу тока.Она численно идентична по величине постоянной противо-ЭДС, когда
оба выражены в единицах СИ:
Когда
л д = л q ,
а когда токи во всех трех фазах уравновешены, то суммарная
крутящий момент T определяется как:
, где I pk пиковый ток в любом из
три обмотки.
Фактор 3/2 следует из того, что он представляет собой стационарную сумму крутящих моментов от
все фазы.Поэтому константа крутящего момента
k t можно также определить как:
, где T — измеренный общий крутящий момент при
испытание сбалансированным трехфазным током с пиковым линейным напряжением
I шт. . Запись в терминах среднеквадратичного тока линии:
Расчет потерь в железе
Потери в железе делятся на два термина, один из которых представляет основное намагничивающее
траектория, а другая представляет траекторию поперечного наконечника зубьев, которая становится активной во время
работа в ослабленном поле.Модель потерь в железе, основанная на работе
Меллор [3].
Член, представляющий основной путь намагничивания, зависит от индуцированного среднеквадратичного значения
фазное напряжение статора, Вэфф:
Это доминирующий параметр при работе на холостом ходу. к это
к это
постоянная обратной ЭДС, относящаяся к среднеквадратичному значению вольт на Гц. Он определяется как k=Vmrms/f, где f — электрическая частота. Первое
слагаемое в правой части — магнитные гистерезисные потери, второе — вихревые
текущие потери, а третий — избыточные потери.Три коэффициента появляются на
числители получены из значений, которые вы предоставляете для разомкнутой цепи
гистерезис, завихрения и избыточные потери.
Термин, обозначающий траекторию поперечной вершины зуба, становится важным, когда
поле размагничивания настроено и может быть определено из анализа методом конечных элементов
испытание на короткое замыкание. Это зависит от среднеквадратичной ЭДС, связанной с вершиной крестообразного зуба.
поток, Vdrms*:
Три члена числителя получены из значений, которые вы указываете для
гистерезис короткого замыкания, вихревые и избыточные потери.
Предопределенная параметризация
Для блока PMSM доступно несколько встроенных параметров.
Эти данные предварительной параметризации позволяют настроить блок для представления
комплектующие от конкретных поставщиков. Параметры этих постоянных магнитов
синхронные двигатели соответствуют паспортам производителя. Чтобы загрузить предопределенный
параметризации, нажмите на Выберите предопределенный
гиперссылка параметризации в маске блока PMSM и выберите часть
вы хотите использовать из списка доступных компонентов.
Примечание
Предопределенные параметризации компонентов Simscape используют доступные источники данных
для предоставления значений параметров. Инженерная оценка и упрощение
предположения используются для заполнения недостающих данных. В результате отклонения
между моделируемым и фактическим физическим поведением следует ожидать.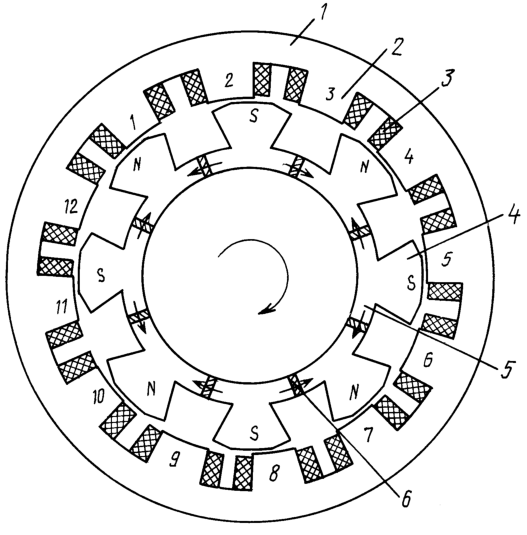 Для обеспечения
Для обеспечения
требуемой точности, вы должны проверить смоделированное поведение в сравнении с экспериментальным
данные и уточняйте модели компонентов по мере необходимости.
Для получения дополнительной информации о предварительной параметризации и списка доступных
компоненты, см. Список предварительно параметризованных компонентов.
Термические порты
Блок имеет четыре дополнительных термопорта, по одному для каждой из трех обмоток и
один для ротора. Эти порты по умолчанию скрыты. Чтобы открыть термальные порты,
щелкните правой кнопкой мыши блок в вашей модели, выберите >
, а затем выберите . Это действие отображает термальные порты на блоке
значок и отображает Зависимость от температуры и
Параметры термального порта .Эти параметры описаны
далее на этой справочной странице.
Использование тепловых портов для имитации влияния сопротивления меди и потерь в железе
которые преобразуют электрическую энергию в тепло. Для получения дополнительной информации об использовании термальных портов
в блоках приводов см. Моделирование тепловых эффектов во вращательных и поступательных приводах.
Трехфазная синхронная машина с постоянными магнитами с синусоидальной или трапециевидной спинкой
электродвижущая сила, или пятифазная синхронная машина с постоянными магнитами с синусоидальной
противоэлектродвижущая сила
Выберите, подается ли на вход крутящий момент, приложенный к валу, ротору
скорость или машинный вал, представленный вращательным механическим портом Simscape™.
Выберите Torque Tm , чтобы указать входной крутящий момент в Н·м.
и открыть порт Tm . Скорость машины
определяется инерцией машины J и разностью между
приложенный механический момент Tm и внутренний электромагнитный момент Te.
Условное обозначение механического крутящего момента — это когда скорость
положительный. Положительный сигнал крутящего момента указывает на режим двигателя, а отрицательный
сигнал указывает на режим генератора.
Выберите Speed w , чтобы указать скорость в рад/с.
и открыть порт w .Задается скорость машины
механическая часть модели (Инерция J) игнорируется. С помощью
скорость в качестве механического входа позволяет моделировать механическую муфту
между двумя машинами.
На следующем рисунке показано, как смоделировать жесткое соединение вала в
двигатель-генератор, когда в машине 2 игнорируется момент трения.
выход скорости машины 1 (двигателя) подключен к входу скорости
машина 2 (генератор), а машина 2 электромагнитного момента
выход, Te, применяется к входному механическому крутящему моменту машины 1, Tm.Фактор Kw учитывает единицы скорости обеих машин (pu или
рад/с) и передаточное отношение коробки передач w2/w1 . Фактор КТ
учитывает единицы крутящего момента обеих машин (pu или N. m) и
m) и
оценки машин. Кроме того, поскольку инерция J2 в машине 2 игнорируется,
J2 добавляется к машине 1 инерционной, J1.
Выберите Порт механического вращения , чтобы открыть
Механический вращающийся порт Simscape, который позволяет подключать
вал машины к другим блокам Simscape с механическими портами вращения.
На следующем рисунке показано, как соединить блок Ideal Torque Source.
из библиотеки Simscape на вал машины, чтобы представить машину в
в режиме двигателя или в режиме генератора.
Учебное пособие по асинхронным двигателям переменного тока и синхронным двигателям с постоянными магнитами, векторное управление с цифровыми сигнальными процессорами, 1994 | Education
Некоторые файлы cookie необходимы для безопасного входа в систему, а другие являются необязательными для функциональных действий. Сбор данных используется для улучшения наших продуктов и услуг.Мы рекомендуем вам принять наши файлы cookie, чтобы убедиться, что вы получаете наилучшую производительность и функциональность, которые может предоставить наш сайт. Для получения дополнительной информации вы можете просмотреть сведения о файлах cookie. Узнайте больше о нашей политике конфиденциальности.
Для получения дополнительной информации вы можете просмотреть сведения о файлах cookie. Узнайте больше о нашей политике конфиденциальности.
Принять и продолжить Принять и продолжить
Используемые нами файлы cookie можно разделить на следующие категории:
- Строго необходимые файлы cookie:
- Это файлы cookie, которые необходимы для работы Analog.com или определенных предлагаемых функций.Они либо служат единственной цели осуществления сетевой передачи, либо строго необходимы для предоставления онлайн-услуги, явно запрошенной вами.
- Аналитические/производительные файлы cookie:
- Эти файлы cookie позволяют нам проводить веб-аналитику или другие формы измерения аудитории, такие как распознавание и подсчет количества посетителей и просмотр того, как посетители перемещаются по нашему веб-сайту. Это помогает нам улучшить работу веб-сайта, например, гарантируя, что пользователи легко находят то, что ищут.
- Функциональные файлы cookie:
- Эти файлы cookie используются для распознавания вас, когда вы возвращаетесь на наш веб-сайт. Это позволяет нам персонализировать наш контент для вас, приветствовать вас по имени и запоминать ваши предпочтения (например, ваш выбор языка или региона). Потеря информации в этих файлах cookie может сделать наши услуги менее функциональными, но не помешает работе веб-сайта.
- Целевые/профилирующие файлы cookie:
- Эти файлы cookie записывают ваше посещение нашего веб-сайта и/или использование вами услуг, страницы, которые вы посетили, и ссылки, по которым вы перешли.Мы будем использовать эту информацию, чтобы сделать веб-сайт и отображаемую на нем рекламу более соответствующими вашим интересам. Мы также можем передавать эту информацию третьим лицам для этой цели.
 Это позволяет нам персонализировать наш контент для вас, приветствовать вас по имени и запоминать ваши предпочтения (например, ваш выбор языка или региона). Потеря информации в этих файлах cookie может сделать наши услуги менее функциональными, но не помешает работе веб-сайта.
Это позволяет нам персонализировать наш контент для вас, приветствовать вас по имени и запоминать ваши предпочтения (например, ваш выбор языка или региона). Потеря информации в этих файлах cookie может сделать наши услуги менее функциональными, но не помешает работе веб-сайта.Отказ от печенья
Электродвигатель | Британика
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что в обмотках статора протекает набор из трех синусоидальных токов формы, показанной на рисунке. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла.Для простоты показана только центральная петля проводника для каждой фазной обмотки. В момент t 1 на рисунке ток в фазе a максимально положителен, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т.е., на одну шестую цикла позже) ток в фазе c максимально отрицателен, а в фазах b и фазе a половина положительного значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 6 ,Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
В момент времени t 2 на рисунке (т.е., на одну шестую цикла позже) ток в фазе c максимально отрицателен, а в фазах b и фазе a половина положительного значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 6 ,Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Вращательное движение магнитного поля по отношению к проводникам ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. На этом рисунке показана картина токов ротора для момента t 1 рисунка. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т.е., крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. На этом рисунке показана картина токов ротора для момента t 1 рисунка. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т.е., крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.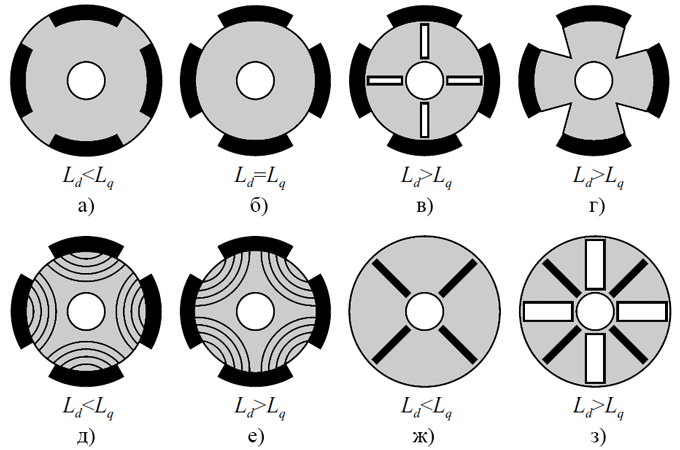
Вращающееся поле и создаваемые им токи в короткозамкнутых проводниках ротора.
Британская энциклопедия, Inc.
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке.Таким образом, общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей для создания магнитного поля и другой синусоиды, опережающей первую на четверть цикла, или на 90 °, для обеспечения требуемой электрической мощности. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне 0.4 на 0,6 величины силовой составляющей.
При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне 0.4 на 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и постоянной частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для мощных двигателей мощностью до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения во времени магнитного потока в статоре машины.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера. Эту разницу в скорости часто называют скольжением.
При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера. Эту разницу в скорости часто называют скольжением.
Другие синхронные скорости можно получить с источником постоянной частоты, создав машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — число полюсов (которое должно быть четное число).Данную железную раму можно намотать для любого из нескольких возможных чисел пар полюсов, используя катушки, расположенные под углом приблизительно (360/ p )°. Крутящий момент, доступный от корпуса машины, останется неизменным, так как он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Крутящий момент, доступный от корпуса машины, останется неизменным, так как он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Сравнительный анализ линейного пуска синхронного двигателя с постоянными магнитами и асинхронного двигателя с короткозамкнутым ротором при общепринятых показателях качества электроэнергии однофазные синхронные двигатели с внутренними постоянными магнитами — прямое сравнение с асинхронными двигателями. IEEE Trans Magn 44(11):4413–4416
Статья
Google Scholar
Кахрисанги М.Г., Исфахани А.Х., Ваез-Задех С., Себдани М.Р. (2012) Синхронный двигатель с постоянным магнитом и асинхронным двигателем с пуском от линии: сравнительное исследование. Springer Electr Eng 7(4):459–466
Springer Electr Eng 7(4):459–466
Google Scholar
Кадзуми Курихара М., Рахман А. (2004 г.) Высокоэффективные синхронные двигатели с внутренними постоянными магнитами с пуском от сети. IEEE Trans Ind Appl 40(3):789–796
Статья
Google Scholar
Мелфи М.Дж., Уманс С.Д., Атем Дж.Е. (2014) Жизнеспособность высокоэффективных двигателей с линейным пуском и постоянными магнитами мощностью в несколько лошадиных сил. IEEE Trans Ind Appl 51(1):120–128
Статья
Google Scholar
Ugale RT, Chaudhari BN (2017) Конфигурации ротора для улучшения пусковых и синхронных характеристик синхронного двигателя с возбуждением от сети с постоянными магнитами. IEEE Trans Ind Appl 64(1):138–148
Google Scholar
Чжан Д., Ан Р., Томас В. (2017) Влияние асимметрии и искажений напряжения на характеристики потерь трехфазного асинхронного двигателя с короткозамкнутым ротором. ИЭТ Электр Сила Приложение 12(2):264–270
ИЭТ Электр Сила Приложение 12(2):264–270
Артикул
Google Scholar
Debruyne C, Sergeant P, Derammelaere S, Desmet Jan J M, Vandevelde L (2014) Влияние искажения напряжения питания на энергоэффективность двигателей с постоянными магнитами с линейным пуском. IEEE Trans Ind Appl 50(2):1034–1043
Статья
Google Scholar
Duarte SX, Campetelli GN (2010) Индекс качества электроэнергии для оценки влияния гармонических искажений напряжения и асимметрии на трехфазные асинхронные двигатели. IEEE Trans Power Deliv 25(3):1846–1854
Статья
Google Scholar
Cummings PG (1986) Оценка влияния системных гармоник на потери и нагрев двигателей с короткозамкнутым ротором. IEEE Trans Ind Appl 22(6):1121–1126
Статья
Google Scholar
Хосе П.Г., де Абреу А., Эмануэль Э. (2002) Тепловое старение асинхронного двигателя, вызванное искажением и дисбалансом напряжения: потеря срока службы и его предполагаемая стоимость. IEEE Trans Ind Appl 38(1):12–20
Статья
Google Scholar
Lee C-Y (1999) Влияние несимметричного напряжения на рабочие характеристики трехфазного асинхронного двигателя. IEEE Trans Energy Convers 14(2):202
Статья
Google Scholar
PragasenPillay PH, Manyage M (2002) Снижение номинальных характеристик асинхронных двигателей, работающих при сочетании несбалансированного напряжения и повышенного или пониженного напряжения. IEEE Trans Energy Convers 17(4):485–491
Статья
Google Scholar
Такахаши А., Кикучи С., Мията К., Биндер А. (2015) Асинхронный крутящий момент синхронных двигателей с постоянными магнитами с пуском от сети. IEEE Trans Energy Convers 30(2):498–506
IEEE Trans Energy Convers 30(2):498–506
Статья
Google Scholar
Гомес Дж. К., Моркос М. М., Рейнери К. А., Кампетелли Г. Н. (2002) Поведение асинхронного двигателя из-за провалов напряжения и коротких перерывов. IEEE Trans Power Deliv 17(2):434–440
Статья
Google Scholar
Дуган Роджер С., МакГранаган М.Ф., Сантосо С., УэйнБити Х. (2012) Качество системы электроснабжения. McGraw-Hill Education, Нью-Йорк
Google Scholar
JawadFaiz HE, Pillay P (1999) Влияние несимметричного напряжения на рабочие характеристики трехфазного асинхронного двигателя.IEEE Trans Energy Convers 19(4):657–662
Google Scholar
де Алмейда А. Т., Феррейра Фернандо Дж. Т. Е., Баоминг Г. (2014) Помимо асинхронных двигателей — технологические тенденции для повышения эффективности.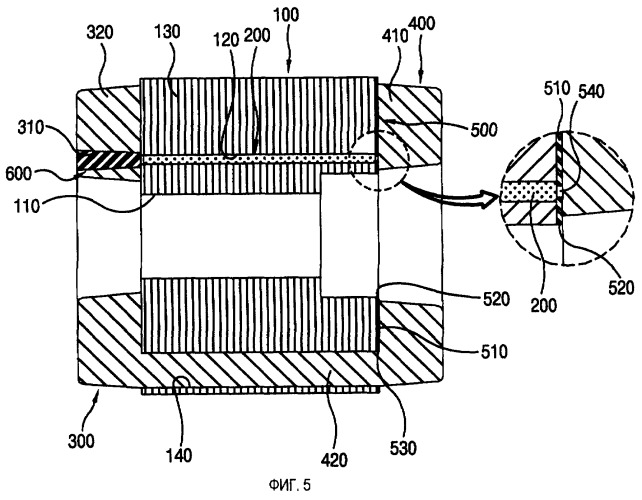 IEEE Trans Ind Appl 50(3):2103–2114
IEEE Trans Ind Appl 50(3):2103–2114
Статья
Google Scholar
Fei W-Z, Luk PC-K, Ma J, Shen J-X, Yang G (2009) Высокопроизводительный синхронный двигатель с постоянными магнитами с линейным пуском, измененный на основе небольшого промышленного трехфазного асинхронного двигателя.IEEE Trans Magn 45(10):4724–4727
Статья
Google Scholar
Jedryczka C, Knypinski L, Demenko A, Sykulski JK (2018) Методология оптимизации формы клетки синхронного двигателя с постоянными магнитами в условиях линейного пуска. IEEE Trans Magn 99:1–4
Статья
Google Scholar
Sarani E, Vaez-Zadeh S (2017) Процедура проектирования и оптимальные рекомендации по общему улучшению характеристик двигателей с постоянными магнитами в установившемся и переходном режимах.IEEE Trans Energy Convers 32(3):885–894
Статья
Google Scholar
