СРАВНЕНИЕ СИНХРОННЫХ ДВИГАТЕЛЕЙ С ПОСТОЯННЫМИ МАГНИТАМИ. Синхронный двигатель с постоянными магнитами
Синхронные тяговые двигатели с возбуждением от постоянных магнитов
Синхронные двигатели с возбуждением от постоянных магнитов, обладающие преимуществами в отношении массогабаритных показателей и потребления энергии, все чаще находят применение в тяговом приводе, хотя они требуют использования сложных систем управления и пока имеют недостаточную надежность.
За последние несколько лет от ведущих мировых поставщиков подвижного состава поступило много предложений, касающихся использования синхронных тяговых двигателей с возбуждением от постоянных магнитов (СДПМ). Такие двигатели имеют меньшие габариты и массу по сравнению с преобладавшими до сих пор на рынке трехфазными асинхронными двигателями.
СДПМ использовались, в частности, на установившем 3 апреля 2007 г. мировой рекорд скорости электропоезде AGV V150 постройки компании Alstom (рис. 1). Они находят применение на подвижном составе различного назначения (таблица) — от трамвая-поезда Citadis Dualis (рис. 2) до двухэтажного междугородного электропоезда Twindexx (рис. 3) для железных дорог Швейцарии (SBB).
 Рис. 1. Высокоскоростной электропоезд AGV V150 во время рекордного пробега
Рис. 1. Высокоскоростной электропоезд AGV V150 во время рекордного пробега Рис. 2. Трамвай-поезд Citadis Dualis (фото: Alstom)
Рис. 2. Трамвай-поезд Citadis Dualis (фото: Alstom) Рис. 3. Электропоезд Twindexx (источник: Bombardier)
Рис. 3. Электропоезд Twindexx (источник: Bombardier)Считается, что железнодорожные компании-операторы консервативны в отношении применения новых технологий. В то же время разработчики и изготовители тягового подвижного состава заинтересованы в скорейшей реализации передовых технических решений. Если использование новых разработок способствует существенному улучшению эксплуатационных показателей, эти разработки достаточно быстро находят применение, что подтверждается опытом внедрения импульсных преобразователей для питания тяговых двигателей постоянного тока последовательного возбуждения, тяговых двигателей постоянного тока независимого возбуждения, синхронных двигателей и трехфазных асинхронных двигателей с короткозамкнутым ротором. С развитием технологий повышалась эффективность тягового привода и совершенствовалось управление им, что позволило улучшить характеристики сцепления и снизить потребление энергии.
СДПМ и электронная аппаратура управления ими представляют собой наиболее современную технологию в области тягового привода. Миллионы СДПМ благодаря своей сравнительно малой массе и хорошей управляемости уже используются в приводах гибридных автомобилей. Более крупные двигатели предоставляют такие же возможности для повышения эффективности тягового привода железнодорожного подвижного состава. Данная технология внедряется на новом подвижном составе различного назначения. Однако при этом выявились несколько существенных проблем, требующих решения.
На автомобилях с двигателями внутреннего сгорания для регулирования скорости обычно используют сложное механическое устройство — коробку передач, благодаря чему двигатель может работать в оптимальном скоростном диапазоне. Тяговые двигатели подвижного состава железных дорог должны эффективно работать во всем диапазоне скорости, обеспечивая передачу крутящего момента на колеса через одноступенчатый редуктор либо непосредственно. Такое простое в плане механического оборудования решение позволяет создать надежные системы привода, не требующие сложного технического обслуживания.
Таким образом, первое требование, предъявляемое при проектировании тяговых двигателей, — их способность обеспечивать крутящий момент или тяговое усилие в широком диапазоне скорости (от 0 до 320 км/ч).
Безусловно, важно, чтобы тяговый двигатель работал надежно. В то же время, с точки зрения машиниста и железнодорожной компании-оператора, в равной степени имеет значение точное и плавное регулирование момента во всем диапазоне скорости при помощи системы управления тяговым приводом. Надлежащее регулирование крутящего момента обеспечивает оптимальное использование сцепления между колесом и рельсом, плавное ускорение, способность поддержания постоянной скорости и возможность применения электрического торможения.
При взаимодействии колес с рельсами крутящий момент тягового двигателя преобразуется в линейную силу тяги или торможения. На рис. 4 представлен график зави-симости силы тяги от скорости, а также кривая сопротивления движению поезда. Кривая силы тяги пересекает кривую сопротивления движению в точке так называемой установившейся скорости, т. е. максимальной теоретически возможной скорости. Вблизи этой точки величина изменения силы тяги, за счет которой создается ускорение поезда (на рис. 4 обозначена красной стрелкой), невелика. На рис. 5 показаны характеристики мощности тягового привода и потребной тяговой мощности (мощность равна произведению скорости и силы тяги).
Тяговые двигатели, как правило, рассчитываются на определенный режим работы. Двигатель должен развивать требуемый момент при нулевой скорости и поддерживать его до номинальной во всей зоне 1 кривой силы тяги. Выше этой скорости тяговый двигатель развивает максимальную выходную мощность. В зоне 2 сила тяги обратно пропорциональна скорости. В зоне 3 вследствие ограничений характеристик тягового двигателя сила тяги обратно пропорциональна квадрату скорости.
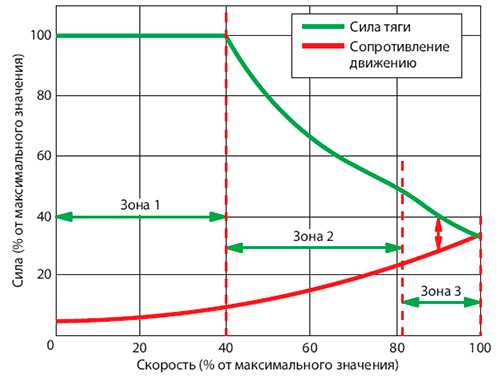 Рис. 4. Тяговая характеристика и сопротивление движению
Рис. 4. Тяговая характеристика и сопротивление движению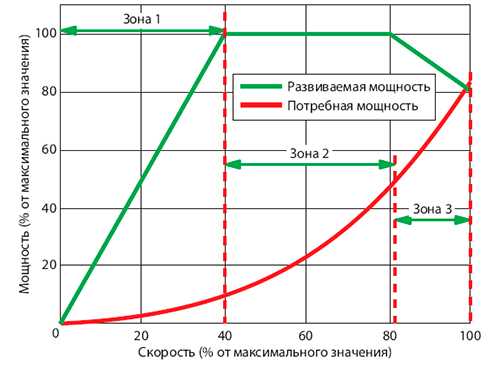 Рис. 5. Характеристики мощности
Рис. 5. Характеристики мощностиПри низкой скорости крутящий момент двигателя теоретически может быть больше, чем передаваемый при взаимодействии колеса и рельса. Однако это привело бы к перегрузке двигателя, поэтому таких режимов следует избегать посредством соответствующих действий машиниста или электронной системы управления.
Ранее для управления тяговыми двигателями постоянного тока применялось регулирование напряжения посредством изменения схемы их соединения с последо-вательного на параллельное и регулирование тока с помощью пускотормозных резисторов. На современном подвижном составе для управления как коллекторными двигателями постоянного тока, так и синхронными и асинхронными двигателями переменного тока ис-пользуются электронные системы, обеспечивающие изменение напряжения или как напряжения, так и частоты. Применяемые ныне системы тягового электропривода позволяют достичь качественного управления во всем диапазоне скорости при относительно простых алгоритмах регулирования.
Регулирование СДПМ позволяет достаточно легко достичь требуемых характеристик в зоне постоянного крутящего момента, однако для регулирования в зоне постоянной мощности требуются более сложные алгоритмы.
Двигатели переменного и постоянного тока, как и СДПМ, по существу работают на основе одних и тех же физических законов. Поэтому принципы управления ими до неко-торой степени подобны. В электрических машинах всех видов крутящий момент возникает при взаимодействии двух магнитных полей. Для появления крутящего момента между векторами напряженности этих магнитных полей должен быть определенный угол, в идеальном случае равный 90 эл. град. Упомянутые поля могут быть созданы токами, про-текающими по обмоткам двигателя, или постоянными магнитами.
В настоящее время в тяговом приводе находят применение главным образом трехфазные асинхронные двигатели. Тем не менее весьма важно понимать природу и поведение магнитных полей статора и ротора электрических машин других типов.
В традиционном двигателе постоянного тока северные и южные полюса поля статора всегда ориентированы в одном и том же направлении, в то время как поле якоря (ротора) сдвинуто на 90 эл. град вследствие использования коллектора. В двигателе последовательно-го возбуждения один и тот же ток проходит как через обмотку статора, так и через обмотку ротора, тогда как в случае использования двигателя независимого возбуждения имеется возможность независимо управлять полями ротора и статора.
В традиционном трехфазном синхронном двигателе магнитное поле ротора создается током, протекающим по его обмотке, а ориентация поля определяется физическим положением обмотки ротора. Поле статора создается током, протекающим по его обмотке, и вращается со скоростью, определяемой частотой инвертора, от которого получает питание обмотка статора. Угол между полями статора и ротора увеличивается в зависимости от крутящего момента, а частоты вращения ротора и поля статора одинаковы. Когда угол становится отрицательным, двигатель переходит в тормозной режим.
В трехфазном асинхронном двигателе магнитное поле статора индуцирует в обмотке ротора ток (рис. 6), который, в свою очередь, генерирует магнитное поле. Последнее, взаимодействуя с полем статора, создает тяговый или тормозной момент. В режиме тяги частота вращения ротора ниже частоты вращения поля статора, заданной преобразователем, а в режиме торможения — выше. Крутящий момент не возникает, если частоты вращения равны. Соотношение частот вращения ротора и поля статора характеризуется величиной, на-зываемой скольжением.
В СДПМ поле ротора создается магнитами, которые либо распределены по поверхности ротора, либо размещены в его пазах (рис. 7). В последнем случае обеспечивается большая механическая прочность и меньшие потери на вихревые токи в роторе. В качестве материала для постоянных магнитов получил распространение сплав неодим-железобор (Nd2Fe14B) благодаря его оптимальным магнитным свойствам. Магнитное поле статора создается с помощью трехфазной многополюсной обмотки, размещенной в пазах шихтованного сердечника.
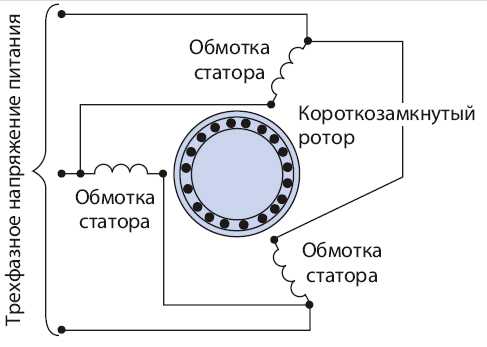 Рис. 6. Принцип работы асинхронного двигателя с короткозамкнутым ротором
Рис. 6. Принцип работы асинхронного двигателя с короткозамкнутым ротором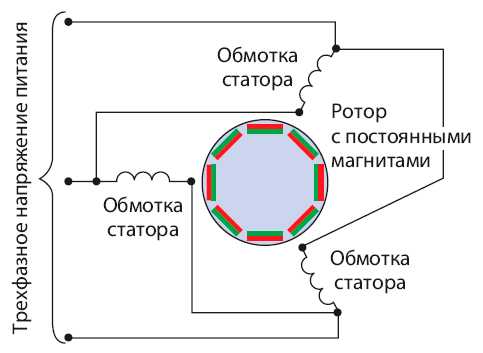 Рис. 7. Принцип работы СДПМ
Рис. 7. Принцип работы СДПМВо всех электрических машинах вращающееся магнитное поле генерирует ЭДС, противоположную по направлению питающему напряжению — так называемую противо-ЭДС. При нулевой частоте вращения она равна нулю, однако с ее ростом линейно возрастает. Для поддержания постоянной величины крутящего момента в зоне 1 (см. рис. 4 и 5) следует увеличивать напряжение питания.
Крутящий момент электрической машины представляет собой произведение магнитного потока и тока. Силовой полупроводниковый преобразователь регулирует питающее постоянное или однофазное напряжение таким образом, чтобы значения тока в обмотках двигателя находились в допустимых пределах. Наиболее современным решением является использование преобразователей на основе биполярных транзисторов с изолированным затвором (IGBT) с широтно-импульсной модуляцией.
В зоне 1, где сила тяги постоянна, напряжение (а в случае асинхронного двигателя — и частота) должно возрастать пропорционально частоте вращения двигателя, при этом значение произведения магнитного потока и тока, т. е. крутящего момента, поддерживается постоянным. При превышении номинального значения частоты вращения приложенное напряжение не может быть увеличено из-за ограничений параметров силового пре-образователя и изоляции двигателя. Однако с точки зрения механических характеристик частота вращения может быть выше.
Переход в зону 2 осуществляется посредством ослабления поля, при этом уменьшается противо-ЭДС или (для СДПМ) осуществляется противодействие ее влиянию. В двигателях постоянного тока это достигается уменьшением величины тока, протекающего через обмотку возбуждения, за счет включения параллельно ей сопротивления ослабления поля, в традиционном синхронном двигателе — путем уменьшения тока в обмотке ротора. В асинхронном двигателе ослабление поля происходит автоматически с увеличением частоты тока обмотки статора, в то время как питающее напряжение остается неизменным. В СДПМ осуществить ослабление поля сложнее, поскольку поле ротора создается постоянными магнитами.
В зоне 3 магнитный поток и ток уменьшаются быстрее, чем в зоне постоянной мощности, чтобы избежать превышения предельных электрических и механических характеристик двигателя. Например, в двигателе постоянного тока независимого возбуждения ток якоря также снижается в зависимости от скорости.
Основная причина расширения применения СДПМ в тяговом приводе — их существенные преимущества по сравнению с трехфазными асинхронными двигателями. В пределах примерно 80% рабочего диапазона КПД СДПМ больше на 1-2%, а удельная мощность — на 30-35%, вследствие чего при равной мощности габариты и масса СДПМ примерно на 25% меньше.
В асинхронном двигателе имеет место нагрев ротора вследствие наличия мощности скольжения. В СДПМ он фактически отсутствует, благодаря чему нет необходимости в охлаждении ротора. Статор СДПМ обычно полностью герметичен и имеет жидкостное охлаждение, что способствует повышению надежности двигателя. Кроме того, при использовании СДПМ возможно осуществлять электрическое торможение при низких значениях скорости, что делает принципиально возможным самоуправляемое торможение при замыкании накоротко обмоток статора. Однако достижение этих преимуществ невозможно без компромисса. Выявлены семь основных факторов, препятствующих распространению СДПМ для целей электрической тяги, хотя уже разработаны методы решения этих проблем.
Ограничения размеров и стоимости четырехквадрантного преобразователя и двигателя не позволяют использовать их во всем диапазоне скорости только путем поддержания величины питающего напряжения, настолько превышающей противо-ЭДС, чтобы величина тока была достаточна для достижения требуемого крутящего момента. Проблема может быть решена с помощью ослабления поля, благодаря чему создаются зоны постоянного момента и постоянной мощности. Поскольку регулирование поля, создаваемого постоянными магнитами, затруднительно, ослабление поля достигается подачей тока в обмотки статора. Таким образом создается поле с вектором напряженности, направленным против вектора напряженности поля, создаваемого постоянными магнитами ротора. При этом возникают потери в меди обмотки статора, что в некоторой степени снижает положительный эффект, получаемый благодаря низким потерям при использовании ротора с постоянными магнитами.
Для управления токами, создающими эффект ослабления поля, необходимо определить положение ротора с точностью до 1-2 эл. град. Для четырехполюсного двигателя требуется механическое разрешение не менее чем 1,5 эл. град. Если использовать датчики, от них требуются весьма высокие точность и надежность, чтобы обеспечить нормальную работу системы управления. Возможно управление и без применения датчиков, однако при этом может быть снижена точность регулирования.
Магнитный поток зависит от температуры, при этом напряженность поля снижается примерно на 1% при увеличении температуры ротора на 10 К. Для СДПМ, которые работают в температурном диапазоне 200 К (от -40 до +160 °С), это имеет существенное значение. Поэтому электронная система управления должна контролировать рабочую температуру и учитывать ее при формировании управляющего сигнала.
Каждый СДПМ требует индивидуального силового полупроводникового регулятора, гарантирующего подачу управляющего импульса на включение силовой цепи строго в требуемый момент времени. Впрочем, в современном тяговом при-воде все чаще используются индивидуальные системы управления каждым двигателем. Таким образом, эта проблема решается.
При значительных токах и высоких температурах может произойти необратимое размагничивание, даже если температура ротора не достигает точки Кюри между 310 и 370 °C. Однако более опасно короткое замыкание в обмотке статора, которое может привести к разрушению двигателя, поскольку создаваемое постоянными магнитами вращающееся поле продолжает индуцировать значительные токи в статоре. Здесь размагничивание может быть полезным, поскольку снижает эти токи.
Еще одна проблема связана с тем, что при работе без нагрузки (когда поезд движется в режиме выбега) вращающийся ротор двигателя с постоянными магнитами продолжает индуцировать токи в сердечнике статора. Возникающие вихревые токи наряду с эффектом гистерезиса вызывают потери в стали, что снижает КПД двигателя.
Редкоземельные металлы, используемые в СДПМ, обладают хорошими магнитными свойствами, но довольно чувствительны к механическому и тепловому воздействию. Конструкция ротора у СДПМ сложнее, чем у асинхронных двигателей. Схема управления СДПМ также сложнее в связи с наличием многократных контуров обратной связи и необходимости преобразования сигнала.
Существует достаточно много областей применения, где преимущества СДПМ безусловно преобладают над их недостатками, и это делает их привлекательными для разработчиков тягового привода. Меньшие размеры и масса имеют особое значение при ограниченности пространства — например, в случае необходимости размещения двигателя на оси колесной пары без редуктора.
Более высокий КПД и меньшие потери в роторе обеспечивают существенные преимущества СДПМ с точки зрения совершенствования эксплуатационных характеристик подвижного состава и сокращения потребления энергии (рис. 8). Это видно, в частности, на примере электропоезда V150 компании Alstom. Асинхронные двигатели устанавливаются на тележках, расположенных под кузовами моторных вагонов, тогда как СДПМ могут быть размещены на тележках под узлами сочленения, что позволяет уменьшить сложность и массу тягового привода.
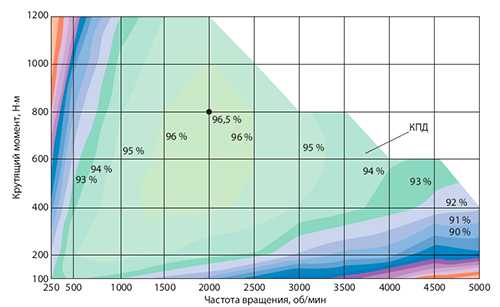 Рис. 8. Электромеханическая характеристика и КПД СДПМ
Рис. 8. Электромеханическая характеристика и КПД СДПМСДПМ могут в перспективе получить намного более широкое применение в тяговом приводе (таблица), подобно тому, как в середине 1980-х годов завоевали популярность трех-фазные асинхронные тяговые двигатели, пришедшие на смену двигателям постоянного тока.
Примеры применения тяговых СДПМ
| Оператор, страна | Подвижной состав | Изготовитель |
| NTV (Италия) | 25 высокоскоростных поездов AGV | Alstom |
| SBB (Швейцария) | 59 двухэтажных электропоездов Twindexx | Bombardier |
| SNCF (Франция) | 31 трамвай-поезд Citadis Dualis | Alstom |
| SNCF (Франция) | Электропоезда Regiolis (рамочный контракт) | Alstom |
| SNCF (Франция) | Электропоезда Omneo (рамочный контракт) | Bombardier |
| Прага (Чехия) | Низкопольные трамвайные вагоны типа 15T | Skoda |
| Метрополитен Токио (Япония) | Электропоезда серии 16000 | Kawasaki |
| JR East (Япония) | Пригородные электропоезда серии E331 для Токио | Toshiba |
| Опытные образцы | ||
| Метрополитен Мюнхена (Германия) | Электропоезд типа C19 с тележками Syntegra | Siemens |
| Китай | Прототип локомотива на топливных элементах | CNR Yongji |
| Швеция | Электропоезд Grona Taget | Bombardier |
| Турция | Низкопольный трамвай Citadis X04 | Alstom |
| Япония | Поезд с изменяемой шириной колеи | RTRI |
Железные Дороги Мира — 2011
speedtrain.ru
Синхронный двигатель с постоянными магнитами
Министерство образования Российской Федерации
Новосибирский Государственный Технический Университет
Утверждаю
Доцент к.т.н.
___________Стернина С.Л.
___________________2006г
Реферат
На тему: Синхронные двигатели с постоянными магнитами.
Разработал
Студент Максимов Р.С.
Группа ТМ-402
Факультет Механико-технологический
Титульный лист выполнен по ГОСТ 2.105-95.ЕСКД. Общие требования к текстовым документам
Содержание
1. Введение.
2. Назначение и область применения.
3. Устройство.
4. Принцип работы синхронной машины.
5. Особенности пуска двигателей с постоянными магнитами.
6. Уравнение ЭДС и момент двигателя в синхронном режиме.
7. Двигатели с радиальным расположением магнитов.
8. Характеристики магнитотвердых материалов, применяемых в магнитных системах Синхронных машин.
9. Заключение.
10. Список литературы.
Введение
Применение постоянных магнитов в магнитных системах синхронных машин так же, как и в других типах электрических машин, обусловлено стремлением уменьшить габариты и вес машины, упростить конструкцию, увеличить к.п.д., повысить надежность в эксплуатации.
Постоянные магниты в синхронных машинах предназначены для создания магнитного поля возбуждения, причем для этого могут применяться постоянные магниты, комбинированные с электромагнитами, по катушкам которых протекает постоянный ток. Использование комбинированного возбуждения позволяет получить требуемые регулировочные характеристики по напряжению и частоте вращения при значительно уменьшенной мощности возбуждения и объеме магнитной системы по сравнению с классическими электромагнитными системами возбуждения синхронных машин.
В настоящее время постоянные магниты применяются при мощности синхронных машин до одного или нескольких киловольт-ампер. По мере создания с постоянных магнитов с улучшенными характеристиками, мощности машин возрастают.
Назначение и область применения.
Синхронные машины, являются машинами переменного тока. Применяются в качестве двигателя и генератора.
Синхронные двигатели применяются в основном в приводах большой мощности. Мощность их достигает нескольких десятков мегаватт. На тепловых станциях, металлургических заводах, шахтах, Холодильниках приводят в движение насосы, и другие механизмы, работающие с неизменной скоростью. Синхронные двигатели могут работать с различной реактивной мощностью. Таким образом, Эти двигатели позволяют улучшить коэффициент мощности предприятия. Однако стоимость приводов с синхронным двигателями выше, чем с асинхронными.
Специальные двигатели малой мощности используют в устройствах, где строгое постоянство скорости, электрочасы, автоматические самопишущие приборы, устройства с программным управлением и др.
На крупных подстанциях электрических систем устанавливают специальные синхронные машины, работающие в режиме холостого хода и отдающие в сеть только реактивную мощность, которая необходима для асинхронных двигателей. Эти машины называют синхронными компенсаторами.
Устройство синхронного двигателя с возбуждением от постоянных магнитов.
Изобретение относится к области использования трехфазных синхронных машин для выработки электроэнергии. Устройство состоит из расположенных на одном валу трехфазного синхронного двигателя и трехфазного синхронного генератора, которые выполнены с возбуждением от постоянных магнитов. Ротор и статор двигателя и генератора имеют явно выраженные полюса. Обмотки статора намотаны вокруг полюсов статора. Постоянные магниты возбуждения в двигателе и генераторе размещены в спинках ротора между его полюсами. В центре полюсов ротора генератора находятся плоские компенсационные постоянные магниты, размещенные в плоскостях, проходящих через ось генератора.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение связано с использованием трехфазных синхронных машин специальной конструкции с возбуждением от постоянных магнитов, НО 2 К 21/27.В настоящее время широко известны конструкции трехфазных синхронных машин (двигателей и генераторов), в том числе и с возбуждением от постоянных магнитов. Описание конструкции синхронных машин с возбуждением от постоянных магнитов могут быть приняты за прототип синхронных машин, предлагаемых в настоящем изобретении. Недостатком существующих синхронных машин является то, что магнитный поток, создаваемый постоянными магнитами полюсов ротора, пересекает проводники обмотки статора, располагаемые в пазах внутренней поверхности статора. При этом генерируемая электрическая мощность в генераторе равна требуемой механической мощности, подводимой к ротору генератора (без учета потерь энергии в статоре и механических потерь энергии в роторе). Точно также механическая мощность, развиваемая двигателем, равна мощности, потребляемой двигателем от источника питания (без учета потерь энергии). В связи с изложенным эффективность существующих синхронных машин, принятых за прототипы, всегда меньше единицы. Технический результат, на достижение которого направлено настоящее изобретение, состоит в создании трехфазных электрических машин (двигателя и генератора) с эффективностью, большей единицы, объединяемых на одном валу в агрегат, позволяющий обеспечить выработку электроэнергии без затрат каких-либо энергоносителей. Устройство синхронного двигателя-генератора (СДГ) состоит из трехфазного синхронного двигателя (ТСД) и трехфазного синхронного генератора (ТСГ), находящихся на одном валу, помещенных в общий корпус. Двигатель и генератор выполнены с явно выраженными полюсами статора и ротора, с обмотками статора (ОС), намотанными “вокруг” полюсов статора. Статор, состоящий из полюсов статора (ПС) и “спинки” статора (СС), выполнен из листовой электротехнической стали. Ротор, состоящий из полюсов ротора (ПР) и спинки ротора (СР), выполнен из монолитной электротехнической стали. В спинке ротора размещены постоянные магниты возбуждения (ПМВ).В центре полюсов ротора генератора дополнительно размещены плоские небольшой толщины компенсационные постоянные магниты (ПМК), располагаемые в плоскости, содержащей ось генератора. Особенностью конструкции двигателей ТСД является малая толщина постоянных магнитов возбуждения (2hПМП).Длина полюсов статора вдоль внутренней поверхности статора (lПС) составляет 60 “электрических” градусов; длина полюсов ротора вдоль наружной поверхности ротора (lПР ) составляет 120 “электрических” градусов. Число полюсов статора (mC) кратно трем и равно mC=3Р, где Р - число пар полюсов в машине. Число полюсов ротора (m P) равно: mP=2P.Все части магнитопроводов двигателя и генератора являются “ненасыщенными”, что позволяет учитывать магнитное сопротивление только постоянных магнитов и воздушных зазоров. Схематические поперечные сечения ТСД и ТСГ приведены на фиг.1
На фиг.1 приняты следующие обозначения:
1 - “спинка” статора (СС)
2 - полюса статора (ПС)
3 - обмотки статора (ОС)
4 - полюса ротора (ПР)
5 - “спинка” ротора (СР)
6 - постоянные магниты возбуждения (ПМВ)
Принцип действия синхронной машины.
Принцип действия синхронных машин основан на взаимодействии магнитных полей статора и ротора. Схематически вращающееся магнитное поле статора можно изобразить полюсами магнитов вращающихся в пространстве со скоростью вращения магнитного поля статора (рис. 1). Поле ротора также можно изобразить в виде постоянного магнита, вращающегося синхронно с полем статора.
При отсутствии внешнего вращающего момента, приложенного к валу машины, оси полей статора и ротора совпадают (рис. 1 а)). Силы притяжения F действуют на ротор вдоль оси полюсов и взаимно компенсируют друг друга. Угол между осями полей статора и ротора равен нулю.
Если на вал машины действует тормозной момент, то ротор смещается в сторону запаздывания на угол (рис. 1 б). В результате силы притяжения F раскладываются на составляющие, направленные вдоль оси полюсов ротора (осевая составляющая) и перпендикулярно оси полюсов (тангенциальная составляющая). Осевые составляющие взаимно компенсируются, а тангенциальные создают вращающий момент , компенсирующий внешний момент, приложенный к валу (D - диаметр точек приложения тангенциальных сил). Машина при этом работает в режиме двигателя, компенсируя расходуемую на валу механическую мощность потреблением активной мощности из сети, питающей статор.
В случае если к ротору прикладывается внешний момент, создающий ускорение, т.е. действующий в направлении вращения вала, картина взаимодействия полей меняется на обратную. Направление углового смещения изменяется на противоположное, соответственно изменяется направление тангенциальных сил и направление действия электромагнитного момента. В этом случае он становится тормозным, а машина работает генератором, преобразующим подводимую в валу машины механическую энергию, в электрическую энергию, отдаваемую в сеть, питающую статор.
Вращающий момент в синхронной машине может возникать и при отсутствии собственного магнитного поля у ротора. Пусть, например, обмотка возбуждения явнополюсного ротора отключена от питания. Тогда картина магнитного поля машины будет иметь вид, представленный на рисунке 2. Здесь явнополюсный ротор связан с системой координат d-q таким образом, что ось d-d совмещена с осью симметрии в направлении максимальной магнитной проводимости, а ось q-q с направлением минимальной магнитной проводимости. Ось d-d совпадает также с осью магнитного поля возбужденного ротора и называется продольной осью, а ось q-q соответственно – поперечной.
При отсутствии внешнего момента явнополюсный ротор займет положение, при котором продольная ось будет совпадать с осью полюсов магнитного поля статора. Это положение соответствует минимальному магнитному сопротивлению для магнитного потока статора.
Если на вал машины будет действовать тормозной момент, то ротор отклонится на угол . При этом магнитное поле статора деформируется, т.к. магнитный поток будет стремиться замкнуться по пути наименьшего сопротивления. Магнитный поток определяется через магнитные силовые линии, т.е. линии, направление которых в каждой точке соответствует направлению действия силы, поэтому деформация поля приведет, также как и в случае возбужденного ротора, к появлению результирующей тангенциальной силы . Отличие от возбужденного ротора будет состоять в том, что тангенциальная сила будет функцией двойного угла . Это отличие возникает вследствие того, что у возбужденного ротора возможно только одно положение устойчивого равновесия при , а невозбужденный ротор может находиться в равновесии при .
Вращающий момент, возникающий в машине с невозбужденным ротором за счет тангенциальных сил называется реактивным моментом и его зависимость от выражается функцией .
Очевидно, что необходимым условием возникновения реактивного момента является магнитная асимметрия ротора.
Рассмотренные выше процессы в синхронной машине наглядно демонстрируют принцип обратимости электрических машин, т.е. способность любой электрической машины изменять направление преобразования энергии на противоположное. В синхронных машинах для перехода от режима работы двигателем в режим генератора достаточно изменить направление (знак) момента нагрузки на валу.
Особенности пуска двигателей с постоянными магнитами.
Подавляющее большинство синхронных двигателей пускается как асинхронные, для чего они снабжаются пусковой обмоткой. Однако в отличие от двигателей с электромагнитным возбуждением постоянные магниты на время пуска невозможно "отключить". Поэтому в процессе разгона поток постоянных магнитов индуцирует в обмотке статора ЭДС, под действием которой по обмотке через источник протекает ток (рис. 3.4). Этот ток, взаимодействуя с полем постоянного магнита, создает момент по своей природе аналогичный асинхронному моменту, развиваемому пусковой обмоткой. Однако этот момент является не движущим, а тормозящим.
Частота тока в пусковой обмотке пропорциональна скольжению (f2 = f1s), поэтому максимум асинхронного момента лежит в области малых скольжений. Частота тока в обмотке статора от поля постоянных магнитов пропорциональна скорости ротора [n2 = n1(1-s)], поэтому максимум тормозного момента лежит в области малых значений n ,т.е. больших скольжений.
Тормозной момент образует провал в пусковой характеристике двигателя, тем самым создает опасность застревания его на малой скорости вращения (рис. 3.5). Понятно, что с этой точки зрения надо бы иметь небольшой поток постоянного магнита, т.е. небольшую ЭДС Е0, хотя винтересах работы в синхронном режиме должно быть наоборот. Оптимальное отношение Е0/U для двигателей мощностью 10 -120 Вт при f = 50 Гц,p = 2лежит в пределах 0,5 - 0,8.
Уравнение ЭДС и момент двигателя в синхронном режиме. Из общего курса электрических машин известно несколько форм уравнения напряжения синхронного двигателя с явновыраженными возбужденными полюсами, например такая:
. Синхронные двигатели с постоянными магнитами на роторе с радиальным (а) и аксиальным (б) расположением магнитов. 1 – постоянный магнит; 2 – сердечник из электротехнической стали; 3 – стержни пусковой обмотки; 4 – короткозамыкающие кольца.
где: 0 - ЭДС, индуцированная в статоре полем ротора; d , q - ток статора по осям d и q; xd, xq - синхронные индуктивные сопротивления статора по продольной и поперечной осям; r1 - активное сопротивление статора.
Уравнению соответствует векторная диаграмма нарис. . Из диаграммы можно вывести выражения токов Idи Iq
. . Векторная диаграмма СМД.
где - степень возбужденности ротора.
Полный ток статора
Если пренебречь активным сопротивлением статора (r1 = 0), формула момента
(3.2)
Вращающий момент двигателя является суммой двух моментов: электромагнитного М1, обусловленного взаимодействием полей статора и ротора и реактивного момента М2 , обусловленного неодинаковой проводимостью по продольной и поперечной осям.
Не учет активного сопротивления статора в микромашинах приводит к значительным количественным ошибкам. Вместе с тем его учет сильно усложняет математический анализ процессов, происходящих в машине /см. [1], формула(4.24)/. Однако и в этом случае формула момента похожа на
(3.2')
где: AЭ - амплитуда электромагнитного момента с учетом r1; Adq - амплитуда реактивного момента с учетом r1; αЭ, αdq - углы сдвига первой и второй составляющих момента; MТ - тормозной момент.
Рассматривая выражение (3.2'), приходим к выводу, что вращающий момент синхронного микродвигателя с учетом r1 , так же как и без учета r1, является суммой двух синусоид, только смещенных влево на углы αЭ и αdq и вниз на величину тормозного момента МТ.
Смещение синусоид влево (в сторону меньших углов) можно пояснить с помощью векторной диаграммы рис. 3.2, на которой пунктиром показан вектор напряжения, замыкающий диаграмму, и угол q при r1 = 0. Из диаграммы видно, что учет активного сопротивления приводит к уменьшению угла между векторами ЭДС и напряжения сети. Это дает основание утверждать, что момент наступает при меньшем угле. Смещение синусоид вниз объясняется потерями в обмотке статора, которые бы не учитывались при r1 = 0, следовательно, меньшей полезной мощностью, а значит и меньшим моментом двигателя.
Двигатели с радиальным расположением магнитов. Роль обмотки возбуждения здесь выполняет блок постоянных магнитов типа звездочки, на который напрессован кольцевой пакет из электротехнической стали. В пазах кольца располагается пусковая короткозамкнутая обмотка и имеются прорези, размеры которых выбираются из условия хорошего пуска и максимального использования энергии постоянных магнитов в синхронном режиме.
Свойства двигателя во многом зависят от того, насколько удачно выбраны размеры этих прорезей. В целях предохранения магнитов от размагничивания и увеличения асинхронного пускового момента прорези должны быть минимальными. Однако не следует забывать о том, что это приводит к росту потоков рассеяния и ухудшению свойств двигателя в синхронном режиме.
Особенностью двигателей радиальной конструкции является большое магнитное сопротивление по продольной оси по сравнению с сопротивлением по поперечной оси. Объясняется это низкой проводимостью постоянного магнита, по которому проходит поток продольной реакции якоря (проводимость магнита лишь раз в 10 больше проводимости воздуха, тогда как проводимость электротехнической стали в тысячи раз превышает ее).
Поток поперечной реакции якоря проходит по полюсным наконечникам из электротехнической стали и, естественно, встречает малое магнитное сопротивление. Поэтому в данных двигателях ld < lq, а следовательно xd < xq. Тот факт, что xd < xqприводит к иному виду угловой характеристики, чем в двигателя «классической» конструкции (рис.3.3).
Стабилизация магнитов в этих двигателях происходит в режиме противовключения, что имеет место при частоте вращения, близкой к синхронной.
(Стабилизацией постоянного магнита называется воздействие на него внешней размагничивающей силой такой величины, больше которой в практике эксплуатации двигателя не встретится.)
В двигателях аксиальной конструкции магнитные сопротивления по продольной и поперечной осям практически одинаковы, т.е. xd≈ xq, поэтому их можно рассматривать как машины с неявновыраженными полюсами. Стабилизация магнитов в этих машинах происходит в режиме короткого замыкания.
Рис. 3.3. Зависимости моментов от угла &teta; при xd < xq (а) и при xd > xq (б).
Положительными свойствами синхронных двигателей с постоянными магнитами являются: высокая стабильность скорости вращения в синхронном режиме, сравнительно высокие энергетические показатели (КПД и cosj), повышенная перегрузочная способность, большая удельная мощность (мощность на единицу массы), хорошая синфазность вращения, что часто требуется в групповых приводах. Недостатки – более высокая стоимость, меньший пусковой момент и больший пусковой ток по сравнению с аналогичными реактивными двигателями.
Характеристики магнитотвердых материалов, применяемых в магнитных системах Синхронных машин.
Основные требования к магнитам:
1. Достаточно высокая остаточная индукция Вя, коэрцитивная сила Нс, энергетическое произведение ВdHD(Вd иHD –координаты экстремальной точки, определяющий максимум произведения) м тем, чтобы получить уменьшенную массу и объем машины.
2. Удовлетворительные технологические и механические свойства, обеспечивающие изготовление магнитов заданной формы и размеров, их прочное сочленение с другими деталями и надежную работу во вращающихся конструкциях роторов.
3. Эффективное противодействие размагничивающим полям при пусках и перегрузках двигателя.
4. Стабильность магнитных свойств во времени.
5. Стабильность магнитных свойств при изменении окружающей температуры в диапазоне: по крайней мере от -40, -500 С до +2000,2500С
6. Умеренная стоимость.
Из известных в настоящее время магнитотвердых материалов, в свете указанных требований, целесообразно рассматривать следующие группы:
1. не деформируемые сплавы на основе системы Fe-Al-Ni(Ални) и Fe-Al-Ni-Co (Алнико): литые и металлокерамические.
2. Микропорошковые композиции, например, из порошков Fe и Fe---Co, особенно с удлиненными частицами.
3. Микропорошковые композиции на основе редкоземельных элементов, например, из порошков SmCo5
4. Ферриты.
Хорошие механические и магнитные свойства имеют сплавы на основе драгоценных металлов, например, сплавы платины, но они очень дороги и их применение не целесообразно.
Литые сплавы типа Алико имеют хорошие магнитные свойства при магнитной текстуре и высокие при направленной кристаллизации. В лучших образцах остаточная магнитная индукция Вr равна
1.12-1,14 Тл при коэрцитивной силе до 15-125 кА/м энергетическое произведение (Вd Hd) достигает 96 ТлкА/м. К недостаткам таких материалов относиться трудность обработки, не высокие механические свойства, в частности, малая механическая прочность: прдел прочности на разрыв 2.1-6.4 кгс/мм2, на из гиб – 5,4-16,8 кгс/мм2.Такая механическая прочность ограничивает диаметр вращающихся магнитов, частоту вращения роторов электрических машин(до 100м/с) и, следовательно диапазон мощностей, в которых могли бы применяться постоянные магниты.
Кроме того, эти материалы имеют довольно сложную технологию, что обуславливает их сравнительно высокую стоимость.
Металлокерамические материалы имеют несколько худшие магнитные свойства, но часто не требуют обработки и имеют более высокие механические характеристики: придел прочности на растяжение до 21-33 кгс/мм2, предел прочности на изгиб до 50-60 кгс/мм2.
Металлокерамические магниты выдерживают линейную скорость вращения до 140 м/сек и выше, тогда как литые магниты при этом разрушаются. Энергетическое произведение доходит до 38 тлкА/м.
Ряд магнитов из тонких порошков имеют хорошие магнитные свойства: например, из порошка Fe-Co с удлиненными частицами, для которых коэрцитивная сила равна 78,4 кА/м, а остаточное индукция Вr=1,08тл.
Магниты из сплавов на основе редкоземельных элементов имеют наивысшие магнитные свойства: энергетическое произведение достигает величины 160-240тлкА/м, а коэрцитивная сила 800кА/м.
Механические свойства этих сплавов исследованы слабо, но, во всяком случае, при использовании их в электрических машинах необходимо принимать меры для обеспечения механической прочности магнитов. Эти сплавы имеют высокую стоимость. Вместе с тем, рекордные магнитные свойства этих сплавов обуславливают все более широкое их применение.
Ферритные магнитотвердые материалы имеют ряд хороших характеристик, в частности, довольно высокую коэрцитивную силу(до 240-270 кА/м), и они сравнительно дешевые, но в тоже время у них есть существенный недостаток: значительное изменение магнитных свойств при изменение температуры. Так, для магнитов из ферритов бария температурный коэффициент остаточной индукции равен 0,2% на 10С в интервале температур от -700 до +2000С. Несмотря на указанный недостаток, ферритные магнитотвердые материалы могут быть рекомендованы для использования в неответственных электрических машинах.
Список литературы:
Исследование свойств постоянных магнитов 1973г Берников
Синхронные машины (Специальный курс)1987г М.Г.Ахматов
Основы теории переходных процессов синхронной машины. 1981г А.И Важнов
М.М.Кацман “Электрические машины и трансформаторы”, часть II, Москва, издательство “Высшая школа”, 1976 г.
Теги: Синхронный двигатель с постоянными магнитами Другое Экономика отраслейdodiplom.ru
Синхронный двигатель с постоянными магнитами
Министерство образования Российской Федерации
Новосибирский Государственный Технический Университет
Утверждаю
Доцент к.т.н.
___________Стернина С.Л.
___________________2006г
Реферат
На тему: Синхронные двигатели с постоянными магнитами.
Разработал
Студент Максимов Р.С.
Группа ТМ-402
Факультет Механико-технологический
Титульный лист выполнен по ГОСТ 2.105-95.ЕСКД. Общие требования к текстовым документам
Содержание
1. Введение.
2. Назначение и область применения.
3. Устройство.
4. Принцип работы синхронной машины.
5. Особенности пуска двигателей с постоянными магнитами.
6. Уравнение ЭДС и момент двигателя в синхронном режиме.
7. Двигатели с радиальным расположением магнитов.
8. Характеристики магнитотвердых материалов, применяемых в магнитных системах Синхронных машин.
9. Заключение.
10. Список литературы.
Введение
Применение постоянных магнитов в магнитных системах синхронных машин так же, как и в других типах электрических машин, обусловлено стремлением уменьшить габариты и вес машины, упростить конструкцию, увеличить к.п.д., повысить надежность в эксплуатации.
Постоянные магниты в синхронных машинах предназначены для создания магнитного поля возбуждения, причем для этого могут применяться постоянные магниты, комбинированные с электромагнитами, по катушкам которых протекает постоянный ток. Использование комбинированного возбуждения позволяет получить требуемые регулировочные характеристики по напряжению и частоте вращения при значительно уменьшенной мощности возбуждения и объеме магнитной системы по сравнению с классическими электромагнитными системами возбуждения синхронных машин.
В настоящее время постоянные магниты применяются при мощности синхронных машин до одного или нескольких киловольт-ампер. По мере создания с постоянных магнитов с улучшенными характеристиками, мощности машин возрастают.
Назначение и область применения.
Синхронные машины, являются машинами переменного тока. Применяются в качестве двигателя и генератора.
Синхронные двигатели применяются в основном в приводах большой мощности. Мощность их достигает нескольких десятков мегаватт. На тепловых станциях, металлургических заводах, шахтах, Холодильниках приводят в движение насосы, и другие механизмы, работающие с неизменной скоростью. Синхронные двигатели могут работать с различной реактивной мощностью. Таким образом, Эти двигатели позволяют улучшить коэффициент мощности предприятия. Однако стоимость приводов с синхронным двигателями выше, чем с асинхронными.
Специальные двигатели малой мощности используют в устройствах, где строгое постоянство скорости, электрочасы, автоматические самопишущие приборы, устройства с программным управлением и др.
На крупных подстанциях электрических систем устанавливают специальные синхронные машины, работающие в режиме холостого хода и отдающие в сеть только реактивную мощность, которая необходима для асинхронных двигателей. Эти машины называют синхронными компенсаторами.
Устройство синхронного двигателя с возбуждением от постоянных магнитов.
Изобретение относится к области использования трехфазных синхронных машин для выработки электроэнергии. Устройство состоит из расположенных на одном валу трехфазного синхронного двигателя и трехфазного синхронного генератора, которые выполнены с возбуждением от постоянных магнитов. Ротор и статор двигателя и генератора имеют явно выраженные полюса. Обмотки статора намотаны вокруг полюсов статора. Постоянные магниты возбуждения в двигателе и генераторе размещены в спинках ротора между его полюсами. В центре полюсов ротора генератора находятся плоские компенсационные постоянные магниты, размещенные в плоскостях, проходящих через ось генератора.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение связано с использованием трехфазных синхронных машин специальной конструкции с возбуждением от постоянных магнитов, НО 2 К 21/27.В настоящее время широко известны конструкции трехфазных синхронных машин (двигателей и генераторов), в том числе и с возбуждением от постоянных магнитов. Описание конструкции синхронных машин с возбуждением от постоянных магнитов могут быть приняты за прототип синхронных машин, предлагаемых в настоящем изобретении. Недостатком существующих синхронных машин является то, что магнитный поток, создаваемый постоянными магнитами полюсов ротора, пересекает проводники обмотки статора, располагаемые в пазах внутренней поверхности статора. При этом генерируемая электрическая мощность в генераторе равна требуемой механической мощности, подводимой к ротору генератора (без учета потерь энергии в статоре и механических потерь энергии в роторе). Точно также механическая мощность, развиваемая двигателем, равна мощности, потребляемой двигателем от источника питания (без учета потерь энергии). В связи с изложенным эффективность существующих синхронных машин, принятых за прототипы, всегда меньше единицы. Технический результат, на достижение которого направлено настоящее изобретение, состоит в создании трехфазных электрических машин (двигателя и генератора) с эффективностью, большей единицы, объединяемых на одном валу в агрегат, позволяющий обеспечить выработку электроэнергии без затрат каких-либо энергоносителей. Устройство синхронного двигателя-генератора (СДГ) состоит из трехфазного синхронного двигателя (ТСД) и трехфазного синхронного генератора (ТСГ), находящихся на одном валу, помещенных в общий корпус. Двигатель и генератор выполнены с явно выраженными полюсами статора и ротора, с обмотками статора (ОС), намотанными “вокруг” полюсов статора. Статор, состоящий из полюсов статора (ПС) и “спинки” статора (СС), выполнен из листовой электротехнической стали. Ротор, состоящий из полюсов ротора (ПР) и спинки ротора (СР), выполнен из монолитной электротехнической стали. В спинке ротора размещены постоянные магниты возбуждения (ПМВ).В центре полюсов ротора генератора дополнительно размещены плоские небольшой толщины компенсационные постоянные магниты (ПМК), располагаемые в плоскости, содержащей ось генератора. Особенностью конструкции двигателей ТСД является малая толщина постоянных магнитов возбуждения (2hПМП).Длина полюсов статора вдоль внутренней поверхности статора (lПС) составляет 60 “электрических” градусов; длина полюсов ротора вдоль наружной поверхности ротора (lПР ) составляет 120 “электрических” градусов. Число полюсов статора (mC) кратно трем и равно mC=3Р, где Р - число пар полюсов в машине. Число полюсов ротора (m P) равно: mP=2P.Все части магнитопроводов двигателя и генератора являются “ненасыщенными”, что позволяет учитывать магнитное сопротивление только постоянных магнитов и воздушных зазоров. Схематические поперечные сечения ТСД и ТСГ приведены на фиг.1
На фиг.1 приняты следующие обозначения:
1 - “спинка” статора (СС)
2 - полюса статора (ПС)
3 - обмотки статора (ОС)
4 - полюса ротора (ПР)
5 - “спинка” ротора (СР)
6 - постоянные магниты возбуждения (ПМВ)
Принцип действия синхронной машины.
Принцип действия синхронных машин основан на взаимодействии магнитных полей статора и ротора. Схематически вращающееся магнитное поле статора можно изобразить полюсами магнитов вращающихся в пространстве со скоростью вращения магнитного поля статора
При отсутствии внешнего вращающего момента, приложенного к валу машины, оси полей статора и ротора совпадают (рис. 1 а)). Силы притяжения F действуют на ротор вдоль оси полюсов и взаимно компенсируют друг друга. Угол между осями полей статора и ротора равен нулю.
Если на вал машины действует тормозной момент, то ротор смещается в сторону запаздывания на угол (рис. 1 б). В результате силы притяжения F раскладываются на составляющие, направленные вдоль оси полюсов ротора , компенсирующий внешний момент, приложенный к валу (D - диаметр точек приложения тангенциальных сил). Машина при этом работает в режиме двигателя, компенсируя расходуемую на валу механическую мощность потреблением активной мощности из сети, питающей статор.
В случае если к ротору прикладывается внешний момент, создающий ускорение, т.е. действующий в направлении вращения вала, картина взаимодействия полей меняется на обратную. Направление углового смещения изменяется на противоположное, соответственно изменяется направление тангенциальных сил и направление действия электромагнитного момента. В этом случае он становится тормозным, а машина работает генератором, преобразующим подводимую в валу машины механическую энергию, в электрическую энергию, отдаваемую в сеть, питающую статор.
Вращающий момент в синхронной машине может возникать и при отсутствии собственного магнитного поля у ротора. Пусть, например, обмотка возбуждения явнополюсного ротора отключена от питания. Тогда картина магнитного поля машины будет иметь вид, представленный на рисунке 2. Здесь явнополюсный ротор связан с системой координат d-q таким образом, что ось d-d совмещена с осью симметрии в направлении максимальной магнитной проводимости, а ось q-q с направлением минимальной магнитной проводимости. Ось d-d совпадает также с осью магнитного поля возбужденного ротора и называется продольной осью, а ось q-q соответственно – поперечной.
При отсутствии внешнего момента явнополюсный ротор займет положение, при котором продольная ось будет совпадать с осью полюсов магнитного поля статора. Это положение соответствует минимальному магнитному сопротивлению для магнитного потока статора.
Если на вал машины будет действовать тормозной момент, то ротор отклонится на угол . При этом магнитное поле статора деформируется, т.к. магнитный поток будет стремиться замкнуться по пути наименьшего сопротивления. Магнитный поток определяется через магнитные силовые линии, т.е. линии, направление которых в каждой точке соответствует направлению действия силы, поэтому деформация поля приведет, также как и в случае возбужденного ротора, к появлению результирующей тангенциальной силы . Это отличие возникает вследствие того, что у возбужденного ротора возможно только одно положение устойчивого равновесия при
Вращающий момент, возникающий в машине с невозбужденным ротором за счет тангенциальных сил называется реактивным моментом и его зависимость от выражается функцией
Очевидно, что необходимым условием возникновения реактивного момента является магнитная асимметрия ротора.
Рассмотренные выше процессы в синхронной машине наглядно демонстрируют принцип обратимости электрических машин, т.е. способность любой электрической машины изменять направление преобразования энергии на противоположное. В синхронных машинах для перехода от режима работы двигателем в режим генератора достаточно изменить направление (знак) момента нагрузки на валу.
Особенности пуска двигателей с постоянными магнитами.
Подавляющее большинство синхронных двигателей пускается как асинхронные, для чего они снабжаются пусковой обмоткой. Однако в отличие от двигателей с электромагнитным возбуждением постоянные магниты на время пуска невозможно "отключить". Поэтому в процессе разгона поток постоянных магнитов индуцирует в обмотке статора ЭДС, под действием которой по обмотке через источник протекает ток (рис. 3.4). Этот ток, взаимодействуя с полем постоянного магнита, создает момент по своей природе аналогичный асинхронному моменту, развиваемому пусковой обмоткой. Однако этот момент является не движущим, а тормозящим.
Частота тока в пусковой обмотке пропорциональна скольжению (f2 = f1s), поэтому максимум асинхронного момента лежит в области малых скольжений. Частота тока в обмотке статора от поля постоянных магнитов пропорциональна скорости ротора [n2 = n1(1-s)], поэтому максимум тормозного момента лежит в области малых значений n ,т.е. больших скольжений.
Тормозной момент образует провал в пусковой характеристике двигателя, тем самым создает опасность застревания его на малой скорости вращения (рис. 3.5). Понятно, что с этой точки зрения надо бы иметь небольшой поток постоянного магнита, т.е. небольшую ЭДС Е0, хотя винтересах работы в синхронном режиме должно быть наоборот. Оптимальное отношение Е0/U для двигателей мощностью 10 -120 Вт при f = 50 Гц,p = 2лежит в пределах 0,5 - 0,8.
Уравнение ЭДС и момент двигателя в синхронном режиме. Из общего курса электрических машин известно несколько форм уравнения напряжения синхронного двигателя с явновыраженными возбужденными полюсами, например такая:
. Синхронные двигатели с постоянными магнитами на роторе с радиальным (а) и аксиальным (б) расположением магнитов. 1 – постоянный магнит; 2 – сердечник из электротехнической стали; 3 – стержни пусковой обмотки; 4 – короткозамыкающие кольца.
где: 0 - ЭДС, индуцированная в статоре полем ротора; d , q - ток статора по осям d и q; xd, xq - синхронные индуктивные сопротивления статора по продольной и поперечной осям; r1 - активное сопротивление статора.
Уравнению соответствует векторная диаграмма нарис. . Из диаграммы можно вывести выражения токов Idи Iq
. . Векторная диаграмма СМД.
где - степень возбужденности ротора.
Полный ток статора
Если пренебречь активным сопротивлением статора (r1 = 0), формула момента
Вращающий момент двигателя является суммой двух моментов: электромагнитного М1, обусловленного взаимодействием полей статора и ротора и реактивного момента М2 , обусловленного неодинаковой проводимостью по продольной и поперечной осям.
Не учет активного сопротивления статора в микромашинах приводит к значительным количественным ошибкам. Вместе с тем его учет сильно усложняет математический анализ процессов, происходящих в машине /см. [1], формула(4.24)/. Однако и в этом случае формула момента похожа на
где: AЭ - амплитуда электромагнитного момента с учетом r1; Adq - амплитуда реактивного момента с учетом r1; αЭ, αdq - углы сдвига первой и второй составляющих момента; MТ - тормозной момент.
Рассматривая выражение (3.2'), приходим к выводу, что вращающий момент синхронного микродвигателя с учетом r1 , так же как и без учета r1, является суммой двух синусоид, только смещенных влево на углы αЭ и αdq и вниз на величину тормозного момента МТ.
Смещение синусоид влево (в сторону меньших углов) можно пояснить с помощью векторной диаграммы рис. 3.2, на которой пунктиром показан вектор напряжения, замыкающий диаграмму, и угол q при r1 = 0. Из диаграммы видно, что учет активного сопротивления приводит к уменьшению угла между векторами ЭДС и напряжения сети. Это дает основание утверждать, что момент наступает при меньшем угле. Смещение синусоид вниз объясняется потерями в обмотке статора, которые бы не учитывались при r1 = 0, следовательно, меньшей полезной мощностью, а значит и меньшим моментом двигателя.
Двигатели с радиальным расположением магнитов. Роль обмотки возбуждения здесь выполняет блок постоянных магнитов типа звездочки, на который напрессован кольцевой пакет из электротехнической стали. В пазах кольца располагается пусковая короткозамкнутая обмотка и имеются прорези, размеры которых выбираются из условия хорошего пуска и максимального использования энергии постоянных магнитов в синхронном режиме.
Свойства двигателя во многом зависят от того, насколько удачно выбраны размеры этих прорезей. В целях предохранения магнитов от размагничивания и увеличения асинхронного пускового момента прорези должны быть минимальными. Однако не следует забывать о том, что это приводит к росту потоков рассеяния и ухудшению свойств двигателя в синхронном режиме.
Особенностью двигателей радиальной конструкции является большое магнитное сопротивление по продольной оси по сравнению с сопротивлением по поперечной оси. Объясняется это низкой проводимостью постоянного магнита, по которому проходит поток продольной реакции якоря (проводимость магнита лишь раз в 10 больше проводимости воздуха, тогда как проводимость электротехнической стали в тысячи раз превышает ее).
Поток поперечной реакции якоря проходит по полюсным наконечникам из электротехнической стали и, естественно, встречает малое магнитное сопротивление. Поэтому в данных двигателях ld < lq, а следовательно xd < xq. Тот факт, что xd < xqприводит к иному виду угловой характеристики, чем в двигателя «классической» конструкции (рис.3.3).
| Стабилизация магнитов в этих двигателях происходит в режиме противовключения, что имеет место при частоте вращения, близкой к синхронной. | (Стабилизацией постоянного магнита называется воздействие на него внешней размагничивающей силой такой величины, больше которой в практике эксплуатации двигателя не встретится.) |
В двигателях аксиальной конструкции магнитные сопротивления по продольной и поперечной осям практически одинаковы, т.е. xd≈ xq, поэтому их можно рассматривать как машины с неявновыраженными полюсами. Стабилизация магнитов в этих машинах происходит в режиме короткого замыкания.
Рис. 3.3. Зависимости моментов от угла &teta; при xd < xq (а) и при xd > xq (б).
Положительными свойствами синхронных двигателей с постоянными магнитами являются: высокая стабильность скорости вращения в синхронном режиме, сравнительно высокие энергетические показатели (КПД и cosj), повышенная перегрузочная способность, большая удельная мощность (мощность на единицу массы), хорошая синфазность вращения, что часто требуется в групповых приводах. Недостатки – более высокая стоимость, меньший пусковой момент и больший пусковой ток по сравнению с аналогичными реактивными двигателями.
Характеристики магнитотвердых материалов, применяемых в магнитных системах Синхронных машин.
Основные требования к магнитам:
1. Достаточно высокая остаточная индукция Вя, коэрцитивная сила Нс, энергетическое произведение ВdHD(Вd иHD –координаты экстремальной точки, определяющий максимум произведения) м тем, чтобы получить уменьшенную массу и объем машины.
2. Удовлетворительные технологические и механические свойства, обеспечивающие изготовление магнитов заданной формы и размеров, их прочное сочленение с другими деталями и надежную работу во вращающихся конструкциях роторов.
3. Эффективное противодействие размагничивающим полям при пусках и перегрузках двигателя.
4. Стабильность магнитных свойств во времени.
5. Стабильность магнитных свойств при изменении окружающей температуры в диапазоне: по крайней мере от -40, -500 С до +2000,2500С
6. Умеренная стоимость.
Из известных в настоящее время магнитотвердых материалов, в свете указанных требований, целесообразно рассматривать следующие группы:
1. не деформируемые сплавы на основе системы Fe-Al-Ni(Ални) и Fe-Al-Ni-Co (Алнико): литые и металлокерамические.
2. Микропорошковые композиции, например, из порошков Fe и Fe---Co, особенно с удлиненными частицами.
3. Микропорошковые композиции на основе редкоземельных элементов, например, из порошков SmCo5
4. Ферриты.
Хорошие механические и магнитные свойства имеют сплавы на основе драгоценных металлов, например, сплавы платины, но они очень дороги и их применение не целесообразно.
Литые сплавы типа Алико имеют хорошие магнитные свойства при магнитной текстуре и высокие при направленной кристаллизации. В лучших образцах остаточная магнитная индукция Вr равна
1.12-1,14 Тл при коэрцитивной силе до 15-125 кА/м энергетическое произведение (Вd Hd) достигает 96 ТлкА/м. К недостаткам таких материалов относиться трудность обработки, не высокие механические свойства, в частности, малая механическая прочность: прдел прочности на разрыв 2.1-6.4 кгс/мм2, на из гиб – 5,4-16,8 кгс/мм2.Такая механическая прочность ограничивает диаметр вращающихся магнитов, частоту вращения роторов электрических машин(до 100м/с) и, следовательно диапазон мощностей, в которых могли бы применяться постоянные магниты.
Кроме того, эти материалы имеют довольно сложную технологию, что обуславливает их сравнительно высокую стоимость.
Металлокерамические материалы имеют несколько худшие магнитные свойства, но часто не требуют обработки и имеют более высокие механические характеристики: придел прочности на растяжение до 21-33 кгс/мм2, предел прочности на изгиб до 50-60 кгс/мм2.
Металлокерамические магниты выдерживают линейную скорость вращения до 140 м/сек и выше, тогда как литые магниты при этом разрушаются. Энергетическое произведение доходит до 38 тлкА/м.
Ряд магнитов из тонких порошков имеют хорошие магнитные свойства: например, из порошка Fe-Co с удлиненными частицами, для которых коэрцитивная сила равна 78,4 кА/м, а остаточное индукция Вr=1,08тл.
Магниты из сплавов на основе редкоземельных элементов имеют наивысшие магнитные свойства: энергетическое произведение достигает величины 160-240тлкА/м, а коэрцитивная сила 800кА/м.
Механические свойства этих сплавов исследованы слабо, но, во всяком случае, при использовании их в электрических машинах необходимо принимать меры для обеспечения механической прочности магнитов. Эти сплавы имеют высокую стоимость. Вместе с тем, рекордные магнитные свойства этих сплавов обуславливают все более широкое их применение.
Ферритные магнитотвердые материалы имеют ряд хороших характеристик, в частности, довольно высокую коэрцитивную силу(до 240-270 кА/м), и они сравнительно дешевые, но в тоже время у них есть существенный недостаток: значительное изменение магнитных свойств при изменение температуры. Так, для магнитов из ферритов бария температурный коэффициент остаточной индукции равен 0,2% на 10С в интервале температур от -700 до +2000С. Несмотря на указанный недостаток, ферритные магнитотвердые материалы могут быть рекомендованы для использования в неответственных электрических машинах.
Список литературы:
Исследование свойств постоянных магнитов 1973г Берников
Синхронные машины (Специальный курс)1987г М.Г.Ахматов
Основы теории переходных процессов синхронной машины. 1981г А.И Важнов
М.М.Кацман “Электрические машины и трансформаторы”, часть II, Москва, издательство “Высшая школа”, 1976 г.
5rik.ru
Синхронный двигатель с постоянными магнитами — лекция
Заключение
Бесконтактные электродвигатели постоянного тока типа БК-1, БК-2, ДБ предназначены для применения в составе научной и служебной аппаратуры космических аппаратов, других технических средств с высокой надежностью и длительным сроком службы без регламентного обслуживания. Основными узлами двигателей являются ротор с постоянными магнитами, статор с обмотками и датчиками положения ротора на эффекте Холла, полупроводниковый коммутатор (встроенный для двигателей БК-1 и БК-2, либо выполненный в виде отдельного конструктива для двигателей типа ДБ). Ротор двигателей БК-2 и ДБ отделен от статора герметичной гильзой, что обеспечивает надежную изоляцию внутренней полости двигателей с вращающимся ротором от окружающей среды, дает возможность простыми средствами встроить электродвигатель, например в насос гидросистемы, не заботясь об установке на вал двигателя каких-либо уплотнителей.
Бесконтактные электродвигатели типа БК-1, БК-2, ДБ различных модификаций успешно применяются в приводах вентиляторов и насосов систем жизнеобеспечения и терморегулирования космических аппаратов, пилотируемых кораблей, скафандров космонавтов. Они используются для перекачки горячей щелочи в насосах электрохимических источников тока, обеспечивают функционирование компрессоров микрокриогенных установок, ряда приборов и систем, в том числе автоматизированных технологических комплексов.
3.2. Шаговые двигатели
Двигатели постоянного тока (ДПТ) с постоянными магнитами Lenze начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Принято различать шаговые двигатели (Autonics, Motionking, Fulling motor) и серводвигатели (Lenze). Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами и двигатели с переменным магнитным сопротивлением (гибридные двигатели). С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рис. 2).
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора.
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции.
Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Эта схема позволит независимо менять полярность напряжения на каждой обмотке.
На рисунке 3 показана последовательность управления для режима с единичным шагом.
На рисунке 4 показана последовательность для полушагового управления.
Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро%аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Шаговые синхронные двигатели активного типа
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Реактивные шаговые двигатели
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т.к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
Линейные шаговые синхронные двигатели
При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
ΔXш=tz/Кt
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Режимы работы синхронного шагового двигателя
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
referat911.ru
СРАВНЕНИЕ СИНХРОННЫХ ДВИГАТЕЛЕЙ С ПОСТОЯННЫМИ МАГНИТАМИ
Актуальность темы
В последнее время всё большее распространение получают бесконтактные электрические машины с постоянными магнитами (ПМ). Использование ПМ позволяет получить требуемые регулировочные характеристики по напряжению и частоте вращения при значительно меньшей мощности возбуждения, (если кроме ПМ для возбуждения используются дополнительные обмотки) и объеме магнитной системы по сравнению с классическими электромагнитными системами возбуждения синхронных машин. Применение ПМ с высокой удельной энергией позволяет улучшить массогабаритные, энергетические и стоимостные показатели машин.
Важной особенностью магнитоэлектрических машин является отсутствие скользящих контактов, что позволяет применять их в системах автоматики, приводах подачи станков, компрессорах, насосах, шаровых мельницах, вентиляторах, прецизионных системах слежения
Недостатками этих машин является невозможность регулирования потока ПМ (если не применяются дополнительные средства), пульсации момента, обусловленные взаимодействием магнитов, расположенных на одном сердечнике (как правило, на роторе) с зубцами другого сердечника. Эти моменты проявляются при холостом ходе и в значительной мере обусловливают пульсации момента при нагрузке.
Значительные пульсации момента иногда являются причиной повышенных вибраций, шума и износа подшипников.
В работе рассмотрено влияние различных способов намагничивания ПМ на характеристики магнитоэлектрических машин.
Историческая справка [2]
Бесконтактные электрические машины с постоянными магнитами – первый тип электромеханического преобразователя энергии, созданного человеком. Ещё в 1831 году М. Фарадей демонстрировал принцип электромагнитной индукции с помощью устройств, содержащих неподвижные обмотки и перемещающиеся постоянные магниты. Начиная с 1832 года, различные исследователи предлагали целый ряд оригинальных конструкций электрических машин с постоянными магнитами. В 1834 году Якоби строит электродвигатель, основанный на принципе притяжения и отталкивания между электромагнитами, а в 1842 г - первый в мире получивший практическое применение магнитоэлектрический генератор постоянного тока.
Однако в дальнейшем, эти машины были практически вытеснены машинами с электромагнитным возбуждением. Это объясняется тем, что по энергетическим и массогабаритным показателям постоянные магниты долгое время значительно уступали электромагнитам.
Примерно до середины ХХ века единственным типом магнитотвёрдых материалов были мартенситные стали, среди которых наибольшее применение получили хромистые, вольфрамовые и кобальтовые стали.
Вольфрамовые стали подвержены значительному структурному старению, в особенности при повышенных температурах. Нагревание выше температуры 1000 С влечёт за собой почти полную потерю ими свойств постоянного магнита. С другой стороны, эти стали легко обрабатываются, обладают высокой магнитной стабильностью, не боятся ударов.
Хромистые стали были разработаны в период первой мировой войны, когда испытывался недостаток вольфрама. Введение хрома повышает остаточную индукцию и коэрцитивную силу. Старение хромистой стали значительно меньше вольфрамовой, она легко механически обрабатывается и дешёва. Наибольшее применение эти стали в гистерезисных двигателях (магнитофоны, проигрыватели и т.д.).
Существенным достижением явилось освоение производства кобальтовых сталей. Добавка кобальта положительно влияет на свойства стали: повышается остаточная индукция, коэрцитивная сила.
В дальнейшем появились также постоянные магниты, реализуемые на основе сплавов железа с кобальтом, молибденом, хромом, некоторыми другими металлами, с относительно высокими удельными свойствами.
Обзор по постоянным магнитам
Магниты обладают высокой коэрцитивной силой – до 1000 кА/м, что значительно снижает возможность размагничивания магнитов под действием реакции якоря и обеспечивает стабильность рабочих характеристик. Кроме того, обладая высокой энергией, которая характеризуется произведением BHmax, редкоземельные магниты позволяют улучшить массогабаритные показатели машин и добиться большей удельной мощности, чем в машинах других типов.
Современные виды постоянных магнитов и их характеристики [3]
Хорошие ь механические и магнитные свойства имеют сплавы на основе драгоценных металлов, например, сплавы платины, но они очень дороги и их применение не целесообразно.
Из известных в настоящее время магнитотвердых материалов, в свете указанных требований, целесообразно рассматривать следующие группы:
• Магниты с полимерным наполнителем, применяемые в медицине эластичные магнитофоры (магнитопласты, магнитоэласты). Br = до 0.05 Тл
• Магнитопласты на основе наполнителя (например, порошка анизотропного NdFeB). Поддаются механической обработке, благодаря пластичности (как резина) и возможности изготовления сложных форм методом литья под давлением (в том числе, с монтажными отверстиями и средствами крепления). Не нагреваются при работе в переменных электромагнитных полях (нечувствительны к воздействию вихревых токов).
Максимальная рабочая температура - до 120-220 градусов Цельсия, в зависимости от теплостойкости связующего материала. Br = 0.5 - 0.6 Тл (Nd-Fe-B).
• Ферриты (прессованные керамические ферритобариевые и ферритостронциевые, недорогие ферромагниты чёрного цвета). В отличие от "железных" магнитов, имеют очень высокое электрическое сопротивление (поэтому феррит бария используют в цепях, подвергающихся действию высокочастотных полей), хорошую механическую прочность, коррозионную стойкость, меньший вес, по сравнению с железными - в 1.5-2 раза. Ферритовые магниты могут быть намагничены с образованием нескольких полюсов на цельном изделии.
Имеют неплохую устойчивость к воздействию внешних магнитных полей. По стоимости - на порядок дешевле ЮНДК, имея, при этом, более высокие показатели коэрцитивной силы. Широко применяются в двигателях постоянного тока, в генераторах, в профессиональных и домашних аудио-системах.
Недостатки ферромагнитов - хрупкость и твёрдость (обрабатывать можно только шлифованием и при помощи алмазной резки). Tc of Br ~ -0.20 % на °C (Температурный коэффициент) - определяет, насколько магнитная индукция зависит от температуры. Величина -0.20 означает, что если температура увеличится на 100 градусов Цельсия, магнитная индукция уменьшится на 20 %. Уменьшение коэрцетивной силы при охлаждении ниже -20°С (что снижает, на морозе, стойкость к размагничиванию магнитным полем; зимой, при -60 градусах - магнитные свойства необратимо теряются и не восстанавливаются при возврате к нормальным термическим условиям) или при нагреве (особенно чувствительны бариевые). Если температура изменяется быстрее 5-10°C/мин - на феррите образуются трещины, что ухудшает его физические свойства. Несмотря на указанные недостатки, благодаря низкой стоимости ферритные магнитотвердые материалы находят достаточно широкое применение для использования в неответственных электрических машинах.
• Термостабильные литые или спечённые магниты "Альнико" (AlNiCo, российское название - ЮНДК) на основе сплавов железо-аллюминий-никель-медь-кобальт. Они легче редкоземельных самарийкобальтовых, при примерно одинаковых параметрах индукции, и заметно дешевле их. Имеют высокую коррозионную и радиационную стойкость. Используются в акустических системах и динамических студийных микрофонах (ставят Alnico V), в гитарных звукоснимателях, в электродвигателях и электрогенераторах, в приборостроении (сенсоры, реле и т.д.) Недостаток - AlNiCo хрупкие (обрабатываются полированием, шлифованием, резкой абразивным кругом) и легко размагничиваются (низкая коэрцитивная сила) под воздействием внешнего магнитного поля, что делает неверными показания стрелочных приборов, в которых они установлены.
• Термоустойчивые деформируемые магниты типа ХК (железо-хром-кобальт, Fe-Cr-Co). Прочность и пластичность современных типов этого сплава - на порядок превосходит аналогичные показатели ЮНДК24 (Алнико 5) при сопоставимых магнитных свойствах. Могут быть получены в виде холоднокатаного листа, горячекатаного и кованого прутка для последующей механической и термомагнитной обработки.
• Спечённые редкоземельные магниты на основе сплавов самарий-кобальт (SmCo, долговечная металлокерамика). Имеют лучшую коррозионную стойкость (то есть, не ржавеют, поэтому и не нуждаются в защитном покрытии) по сравнению с остальными редкоземельными материалами и большие значения максимальной рабочей температуры (термостабильные до 350°С) и коэрцитивной силы (то есть, магнитотвёрдые - устойчивые к размагничиванию). По сравнению с ЮНДК - на порядок большая коэрцетивная сила по намагниченности.
Недостатки - хрупкость и высокая цена. Применяются в космических аппаратах и мобильных телефонах, в мотоциклах и газонокосилках, в авиационной и компьютерной технике, в медицинском оборудовании, в миниатюрных электромеханических приборах и устройствах (наручных часах, наушниках и т.д.) Используются в современном приборостроении.
• Неодимовые - редкоземельные магниты на основе сплавов неодим-железо-бор (NdFeB). Они хрупкие и чувствительные к температуре (предел допустимого нагрева - зависит от марки магнита). После сильного перегрева - необратимо и полностью теряется намагниченность (восстановить можно перемагничиванием на специальной установке). Имеют невысокую коррозионную стойкость - легко окисляются (ржавеют), если повреждено антикоррозионноее покрытие (краска, лак, тонкая металлическая плёнка из никеля, меди или цинка). В виде порошка - могут воспламениться, с выделением ядовитого дыма. Лучше поддаются механической обработке - гибкие Nd-магнитопласты (NdFeB). Спечённые неодимовые магниты имеют преимущество - наибольшую, по сравнению с остальными видами, остаточную индукцию и очень высокое энергетическое произведение. Максимальная рабочая температура повышается - при добавлении кобальта вместо железа, но это ведёт к удорожанию материала. Широко применяются в компьютерной технике (двигатели электроприводов дисков, устройства считывания и записи информации), в моторах и датчиках.
Сравнение наиболее употребляемых ПМ различных марок [3]:
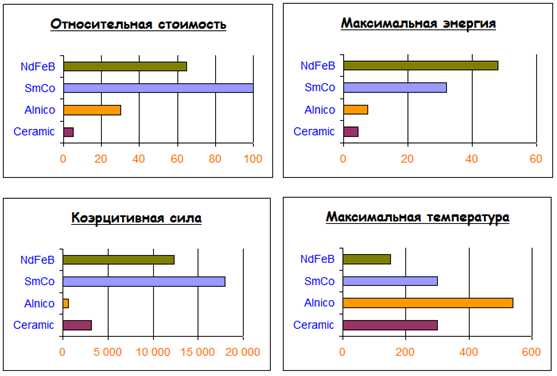
Рисунок 1. Сравнительные диаграммы различных материалов ПМ [3]
Нужно отметить, что представленные диаграммы характеризуют наиболее распространенные характеристики семейств магнитных материалов. Для магнитов различных производителей конкретные характеристики могут отличаться от приведенных (например, коэрцитивная сила магнитов Nd-Fe-B при некоторых добавках может достигать величины 22 кЭ). Тем не менее, диаграммы демонстрируют общие соотношения между семействами магнитных материалов.
Варианты расположения постоянных магнитов в синхронной машине
1) Поверхностные магниты
Магниты располагают на внешней поверхности ротора, чем обеспечивается простота конструкции, хорошие динамические характеристики и сравнительно низкая стоимость.
2) Встроенные магниты
Использование встроенных магнитов позволяет увеличить производительность электрической машины за счет возрастания плотности магнитного потока при сохранении высокого момента на больших скоростях вращения.
Способы крепления ПМ:
Закрепить магниты можно разными способами:
1) Приклеить их к ротору. Этот вариант при высокой скорости вращения малопригоден. Но в последнее время разработан ряд клеев сочень высокими свойствами.
2) Разнообразными бандажами. Это может быть как самая простая сталь или сталь с особыми магнитными свойствами, так и всевозможные титановые сплавы. Также эту задачу можно решить с помощью углеводородных материалов (карбоновые, базальтовые нити и т.д).
Методы исследования [1]
Для моделирования магнитного поля двигателя применяется конечно – элементная программа FEMM (Finite Element Method Magnetics), используемая в учебном процессе кафедры электромеханики (программа разработана профессором Массачуcетского Технологического института Д. Микером (David Meeker), США) и доступна для широкого пользования через сеть интернет.
Картины поля при радиальном и параллельном намагничивании почти не отличаются друг от друга, имеют примерно одинаковую индукцию в ярме и распределение индукции в зазоре, близкой к синусоидальной. Масса магнитов также одинакова. Таким образом для электрической машины малой полюсности и малой мощности непринципиально какой тип намагниченности ПМ будет выбран.
Применение магнитов с тангенциальной намагниченностью и намагниченностью по Хальбаху является нецелесообразным на машинах с малым количеством полюсов, что можно сказать, взглянув на полученную картину поля и распределения магнитной индукции в зазоре четырёхполюсной машины.
Гораздо лучше данный типы намагниченности проявляет себя на многополюсных машинах.
Заключение:
1) Сделан обзор литературы
а) по магнитам (используемые материалы, конфигурация, расположение, вид намагничивания)
б) по обмоткам, применяемым в бесконтактных ЭМ с ПМ
2) Проведен анализ конечно-элементных моделей, показано, что области применения различных типов намагничивания магнитов зависят от числа полюсов проектируемых машин.
Показано также, что конечно-элементные модели являются наглядным средством для сравнительной оценки технических показателей магнитоэлектрических машин.
Список литературы:
- David Meeker, Finite Element Method Magnetics: OctaveFEMM: User’s Manual – 2006 – http://www.femm.info/Archives/doc/octavefemm.pdf
- Балагуров В.А., Галтеев Ф.Ф., Ларионов А.Н.: Электрические машины с постоянными магнитами – изд. «Энергия», 1964 – С. 4-6, 16-17.
- Энциклопедия – Современные постоянные магниты – Электронный ресурс - http://www.valtar.ru/Magnets4/mag_4_27.htm
sibac.info
Синхронные машины с постоянными магнитами
⇐ ПредыдущаяСтр 62 из 85Следующая ⇒Синхронные машины с постоянными магнитами (магнитоэлектрические) не имеют обмотки возбуждения на роторе, а возбуждающий магнитный поток у них создается постоянными магнитами, расположенными на роторе. Статор этих машин обычной конструкции с двух- или трехфазной обмоткой.
Применяют эти машины чаще всего в качестве двигателей небольшой мощности. Синхронные генераторы с постоянными магнитами применяют реже, главным образом в качестве автономно работающих генераторов повышенной частоты, малой и средней мощности.
Синхронные магнитоэлектрические двигатели. Эти двигатели получили распространение в двух конструктивных исполнениях: с радиальным и аксиальным расположением постоянных магнитов.
При радиальном расположении постоянных магнитов пакет ротора с пусковой клеткой, выполненный в виде полого цилиндра, закрепляют на наружной поверхности явно выраженных полюсов постоянного магнита 3. В цилиндре делают межполюсные прорези, предотвращающие замыкание потока постоянного магнита в этом цилиндре (рис. 23.1, ).
При аксиальном расположении магнитов конструкция ротора аналогична конструкции ротора асинхронного короткозамкнутого двигателя. К торцам этого ротора прижаты кольцевые постоянные магниты (рис. 23.1, ).
Конструкции с аксиальным расположением магнита применяют в двигателях малого диаметра мощностью до 100 Вт; конструкции с радиальным расположением магнитов применяют в двигателях большего диаметра мощностью до 500 Вт и более.
Физические процессы, протекающие при асинхронном пуске этих двигателей, имеют некоторую особенность, обусловленную тем, что магнитоэлектрические двигатели пускают в возбужденном состоянии. Поле постоянного магнита в процессе разгона ротора наводит в обмотке статора ЭДС , частота которой увеличивается пропорционально частоте вращения ротора. Эта ЭДС наводит в обмотке статора ток, взаимодействующий с полем постоянных магнитов и создающий тормозной момент , направленный встречно вращению ротора.
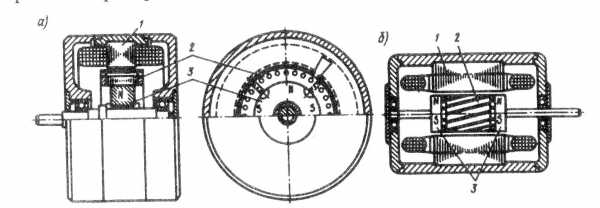
Рис. 23.1. Магнитоэлектрические синхронные двигатели с радиальным (а) и
аксиальным (б) расположением постоянных магнитов:
1 — статор, 2 — короткозамкнутый ротор, 3 — постоянный магнит
Таким образом, при разгоне двигателя с постоянными магнитами на его ротор действуют два асинхронных момента (рис. 23.2): вращающий (от тока , поступающего в обмотку статора из сети) и тормозной (от тока , наведенного в обмотке статора полем постоянного магнита).
Однако зависимость этих моментов от частоты вращения ротора (скольжения) различна: максимум вращающего момента соответствует значительной частоте (небольшому скольжению), а максимум тормозного момента МТ - малой частоте вращения (большому скольжению). Разгон ротора происходит под действием результирующего момента , который имеет значительный «провал» в зоне малых частот вращения. Из приведенных на рисунке кривых видно, что влияние момента на пусковые свойства двигателя, в частности на момент входа в синхронизм Мвх, значительно.
Для обеспечения надежного пуска двигателя необходимо, чтобы минимальный результирующий момент в асинхронном режиме и момент входа в синхронизм Мвх, были больше момента нагрузки. Форма кривой асинхронного момента магнитоэлектрического
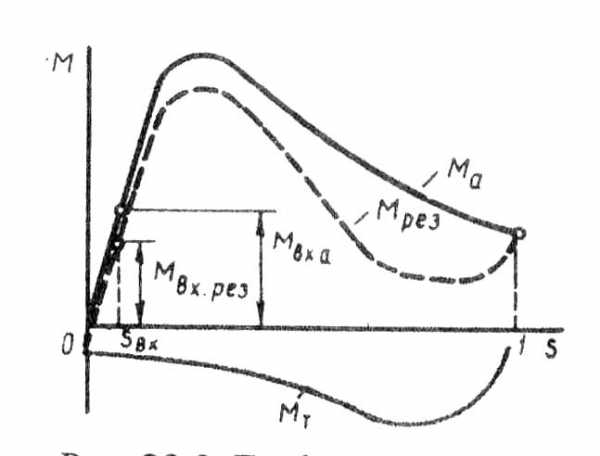
Рис.23.2. Графики асинхронных моментов
магнитоэлектрического синхронного двигателя
двигателя в значительной степени зависит от активного сопротивления пусковой клетки и от степени возбужденности двигателя, характеризуемой величиной , где Е0 -ЭДС фазы статора, наведенная в режиме холостого хода при вращении ротора с синхронной частотой. С увеличением «провал» в кривой момента увеличивается.
Электромагнитные процессы в магнитоэлектрических синхронных двигателях в принципе аналогичны процессам в синхронных двигателях с электромагнитным возбуждением. Однако необходимо иметь в виду, что постоянные магниты в магнитоэлектрических машинах подвержены размагничиванию действием магнитного потока реакции якоря. Пусковая обмотка несколько ослабляет это размагничивание, так как оказывает на постоянные магниты экранирующее действие.
Положительные свойства магнитоэлектрических синхронных двигателей — повышенная устойчивость работы в синхронном режиме и равномерность частоты вращения, а также способность синфазного вращения нескольких двигателей, включенных в одну сеть. Эти двигатели имеют сравнительно высокие энергетические показатели (КПД и ,).
Недостатки магнитоэлектрических синхронных двигателей — повышенная стоимость по сравнению с синхронными двигателями других типов, обусловленная высокой стоимостью и сложностью обработки постоянных магнитов, выполняемых из сплавов, обладающих большой коэрцитивной силой (ални, алнико, магнико и др.). Эти двигатели обычно изготовляют на небольшие мощности и применяют в приборостроении и в устройствах автоматики для привода механизмов, требующих постоянства частоты вращения.
Синхронные магнитоэлектрические генераторы. Ротор такого генератора выполняют при малой мощности в виде «звездочки» (рис. 23.3, а), при средней мощности — с когтеобразными полюсами и цилиндрическим постоянным магнитом (рис. 23.3, б). Ротор с когтеобразными полюсами дает возможность получить генератор с рассеянием полюсов, ограничивающим ударный ток при внезапном коротком замыкании генератора. Этот ток представляет большую опасность для постоянного магнита ввиду сильного размагничивающего действия.
Помимо недостатков, отмеченных при рассмотрении магнитоэлектрических синхронных двигателей, генераторы с постоянными магнитами имеют еще один недостаток, обусловленный отсутствием обмотки возбуждения, а поэтому регулировка напряжения в магнитоэлектрических генераторах практически невозможна. Это затрудняет стабилизацию напряжения генератора при изменениях нагрузки.
Рис.23.3. Роторы магнитоэлектрических синхронных генераторов:
1 – вал; 2 – постоянный магнит; 3 – полюс; 4 – немагнитная втулка
Читайте также:
lektsia.com
Синхронный двигатель с постоянными магнитами
Дисциплина: Технические Тип работы: Реферат Тема: Синхронный двигатель с постоянными магнитамиМинистерство образования Российской Федерации
Новосибирский Государственный Технический Университет
Утверждаю
Доцент
к.т.н.
___________Стернина С.Л.
___________________2006г
Реферат
На тему: Синхронные двигатели с постоянными магнитами.
Разработал
Студент Максимов Р.С.
Группа ТМ-402
Факультет Механико-технологический
Титульный лист выполнен по ГОСТ 2.105-95.ЕСКД. Общие требования к текстовым документам
Содержание
Введение.
Назначение и область применения.
Устройство.
Принцип работы синхронной машины.
Особенности пуска двигателей с постоянными магнитами.
Уравнение ЭДС и момент двигателя в синхронном режиме.
Двигатели с радиальным расположением магнитов.
Характеристики магнитотвердых материалов, применяемых в магнитных системах Синхронных машин.
Заключение.
Список литературы.
Введение
Применение постоянных магнитов в магнитных системах синхронных машин так же, как и в других типах электрических машин, обусловлено стремлением уменьшить габариты и вес машины,
упростить конструкцию, увеличить к.п.д., повысить надежность в эксплуатации.
Постоянные магниты в синхронных машинах предназначены
для создания магнитного поля возбуждения, причем для этого могут применяться постоянные магниты, комбинированные с электромагнитами, по катушкам которых протекает
постоянный ток. Использование комбинированного возбуждения позволяет получить требуемые регулировочные характеристики по напряжению и частоте вращения при значительно уменьшенной
мощности возбуждения и объеме магнитной системы по сравнению с классическими электромагнитными системами возбуждения синхронных машин.
В настоящее время постоянные магниты применяются при мощности синхронных машин до одного или нескольких киловольт-ампер. По мере создания с постоянных магнитов с улучшенными
характеристиками, мощности машин возрастают.
Назначение и область применения.
Синхронные машины, являются машинами переменного тока. Применяются в качестве двигателя и генератора.
Синхронные двигатели применяются в основном в приводах большой мощности. Мощность их достигает нескольких десятков мегаватт. На тепловых станциях, металлургических заводах,
шахтах, Холодильниках приводят в движение насосы, и другие механизмы, работающие с неизменной скоростью. Синхронные двигатели могут работать с различной реактивной мощностью. Таким
образом, Эти двигатели позволяют улучшить коэффициент мощности предприятия. Однако стоимость приводов с синхронным двигателями выше, чем с асинхронными.
Специальные двигатели малой мощности используют в устройствах, где строгое постоянство скорости, электрочасы, автоматические самопишущие приборы, устройства с программным
управлением и др.
На крупных подстанциях электрических систем устанавливают специальные синхронные машины, работающие в режиме холостого хода и отдающие в сеть только реактивную мощность, которая
необходима для асинхронных двигателей. Эти машины называют синхронными компенсаторами.
Устройство синхронного двигателя с возбуждением от постоянных магнитов.
Изобретение относится к области использования трехфазных синхронных машин для выработки электроэнергии. Устройство состоит из расположенных на одном валу трехфазного синхронного
двигателя и трехфазного синхронного генератора, которые выполнены с возбуждением от постоянных магнитов. Ротор и статор двигателя и генератора имеют явно выраженные полюса. Обмотки
статора намотаны вокруг полюсов статора. Постоянные магниты возбуждения в двигателе и генераторе размещены в спинках ротора между его полюсами. В центре полюсов ротора генератора
находятся плоские компенсационные постоянные магниты, размещенные в плоскостях, проходящих через ось генератора.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение связано с использованием трехфазных синхронных машин специальной конструкции с возбуждением от постоянных магнитов, НО 2 К 21/27.В настоящее время широко известны
конструкции трехфазных синхронных машин (двигателей и генераторов), в том числе и с возбуждением от постоянных магнитов. Описание конструкции синхронных машин с возбуждением от
постоянных магнитов могут быть приняты за прототип синхронных машин, предлагаемых в настоящем изобретении. Недостатком существующих синхронных машин является то, что магнитный поток,
создаваемый постоянными магнитами полюсов ротора, пересекает проводники обмотки статора, располагаемые в пазах внутренней поверхности статора. При этом генерируемая электрическая
мощность в генераторе равна требуемой механической мощности, подводимой к ротору генератора (без учета потерь энергии в статоре и механических потерь энергии в роторе). Точно также
механическая мощность, развиваемая двигателем, равна мощности, потребляемой двигателем от источника питания (без учета потерь энергии). В связи с изложенным эффективность существующих
синхронных машин, принятых за прототипы, всегда меньше единицы. Технический результат, на достижение которого направлено настоящее изобретение, состоит в создании трехфазных
электрических машин (двигателя и генератора) с эффективностью, большей единицы, объединяемых на одном валу в агрегат, позволяющий обеспечить выработку электроэнергии без затрат
каких-либо энергоносителей. Устройство синхронного двигателя-генератора (СДГ) состоит из трехфазного синхронного двигателя (ТСД) и трехфазного синхронного генератора (ТСГ),
находящихся на одном валу, помещенных в общий корпус. Двигатель и генератор выполнены с явно выраженными полюсами статора и ротора, с обмотками статора (ОС), намотанными “вокруг”
полюсов статора. Статор, состоящий из полюсов статора (ПС) и “спинки” статора (СС), выполнен из листовой электротехнической стали. Ротор, состоящий из полюсов ротора (ПР) и спинки
ротора (СР), выполнен из монолитной электротехнической стали. В спинке ротора размещены постоянные магниты возбуждения (ПМВ).В центре полюсов ротора генератора дополнительно размещены
плоские небольшой толщины компенсационные постоянные магниты (ПМК), располагаемые в плоскости, содержащей ось генератора. Особенностью конструкции двигателей ТСД является малая
толщина постоянных магнитов возбуждения (2h
ПМП).Длина полюсов статора вдоль внутренней поверхности статора (l
ПС) составляет 60 “электрических” градусов; длина полюсов ротора вдоль наружной поверхности ротора (l
ПР ) составляет 120 “электрических” градусов. Число полюсов статора (m
C) кратно трем и равно m
C=3Р, где Р - число пар полюсов в машине. Число полюсов ротора (m
P) равно: m
P=2P.Все части магнитопроводов двигателя и генератора являются “ненасыщенными”, что позволяет учитывать магнитное сопротивление только постоянных магнитов и воздушных
зазоров. Схематические поперечные сечения ТСД и ТСГ приведены на фиг.1
На фиг.1 приняты следующие обозначения:
1 - “спинка” статора (СС)
2 - полюса статора (ПС)
3 - обмотки статора (ОС)
4 - полюса ротора (ПР)
5 - “спинка” ротора (СР)
6 - постоянные магниты возбуждения (ПМВ)
Принцип действия синхронной машины.
Принцип действия синхронных машин основан на взаимодействии магнитных полей статора и ротора. Сх...
Забрать файлПохожие материалы:
www.refland.ru









Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






