
Структурные схемы электроприводов — Технарь
Структурные схемы электроприводов подач различаются видами преобразовательных и управляющих устройств (рис. 17).
Ступенчатое регулирование скорости стола С осуществляет редукторный электропривод (рис. 17, а), который содержит нерегулируемый асинхронный электродвигатель М переменного тока, связанный с ходовым винтом через редуктор с электромагнитными муфтами ЭМ1 и ЭМ2. Привод имеет программное управление от системы числового программного управления (СЧПУ), получающей сигналы от преобразователя пути (датчика обратной связи ДОС) через канал обратной связи ОС. В начале перемещения от СЧПУ включается электромагнитная муфта ЭМ1. Электродвигатель М приводит во вращение ходовой винт, и стол станка С начинает поступательно перемещаться; датчик обратной связи при повороте ходового винта дает соответствующее число импульсов. При подходе к точке останова СЧПУ подает сигнал на отключение электромагнитной муфты ЭМ1 и включение электромагнитной муфты ЭМ2, при этом через редуктор осуществляется медленное перемещение стола С и полное торможение электропривода. Этот электропривод применяют только в позиционных и прямоугольных системах числового программного управления.
Этот электропривод применяют только в позиционных и прямоугольных системах числового программного управления.
Бесступенчатое регулирование скорости стола С осуществляется в регулируемом электроприводе (рис. 17, б). Электропривод содержит электродвигатель М постоянного тока с широким диапазоном бесступенчатого регулирования, который питается от мощного статического преобразователя П (например, тиристорного) и имеет программное управление от СЧПУ, получающей сигналы от преобразователя пути ДОС через канал обратной связи ОС. Электропривод применяют также только в позиционных и прямоугольных системах ЧПУ. Рассмотренные схемы электроприводов используют и в контурных системах ЧПУ, но при этом применяют следящее управление электроприводом. Схемы электроприводов, имеющие преобразователи перемещений ДОС, называют замкнутыми.
Шаговый электропривод (рис. 17, в) осуществляет ступенчатое (дискретное) перемещение стола С. Он содержит шаговый электродвигатель ШД малой мощности, гидроусилитель момента ГУМ, кинематическую пару винт—гайка, связанную со столом станка С.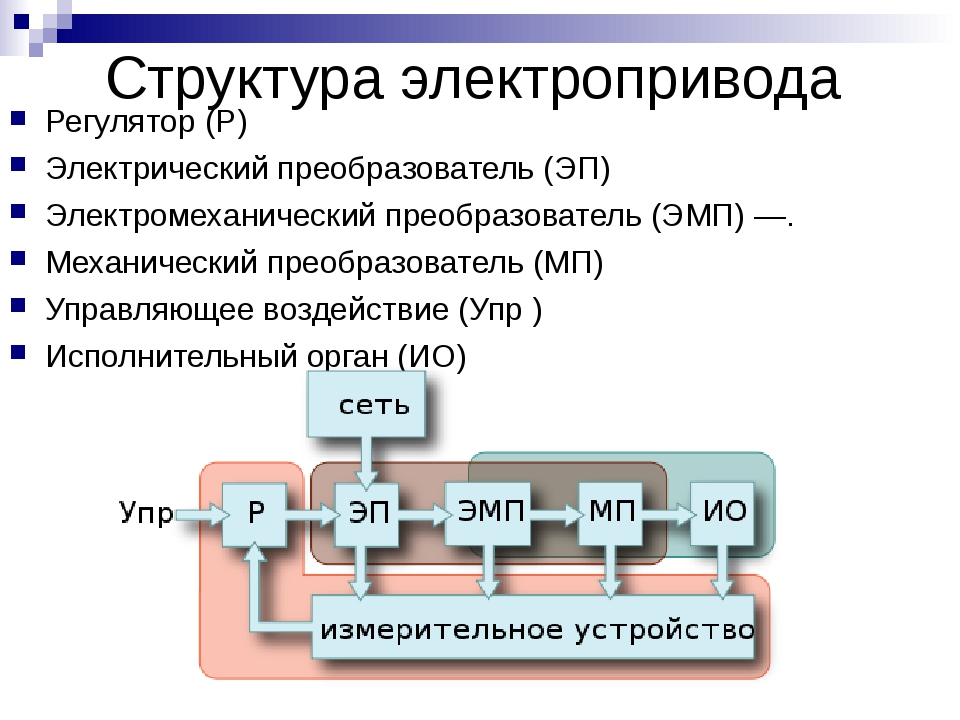 Шаговый электродвигатель при подаче от СЧПУ каждого командного импульса напряжения поворачивает свой вал на небольшой угол. Вследствие малой мощности шагового электродвигателя ШД его момент недостаточен для перемещения стола С. Поэтому он работает совместно с гидроусилителем момента ГУМ, который создан на основе аксиально-поршневого гидромотора. У этого гидромотора золотниковый распределитель соединен с валом электродвигателя. Таким образом, величина перемещения стола С определяется числом импульсов, поступивших от СЧПУ. Если электродвигатель отрабатывает все поступившие импульсы, то преобразователь перемещения не нужен. Такую систему называют разомкнутой.
Шаговый электродвигатель при подаче от СЧПУ каждого командного импульса напряжения поворачивает свой вал на небольшой угол. Вследствие малой мощности шагового электродвигателя ШД его момент недостаточен для перемещения стола С. Поэтому он работает совместно с гидроусилителем момента ГУМ, который создан на основе аксиально-поршневого гидромотора. У этого гидромотора золотниковый распределитель соединен с валом электродвигателя. Таким образом, величина перемещения стола С определяется числом импульсов, поступивших от СЧПУ. Если электродвигатель отрабатывает все поступившие импульсы, то преобразователь перемещения не нужен. Такую систему называют разомкнутой.
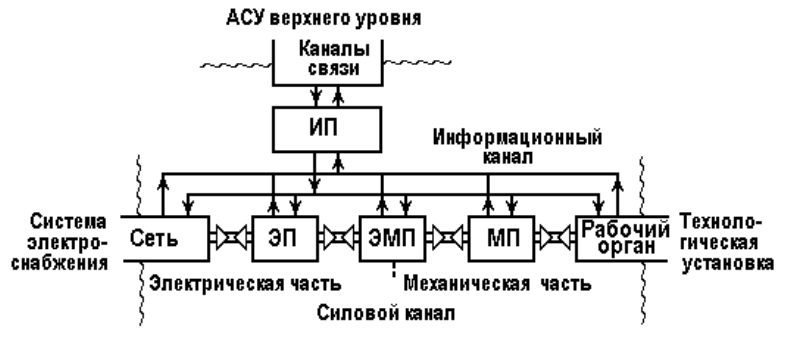
Обобщенная структурная схема современного электропривода
1 ОСНОВНЫЕ ПОНЯТИЯ И ТЕРМИНЫ
Рисунок 1 – Обобщенная структурная схема современного электропривода
Силовая часть:
КЗА – коммутационно-защитная аппаратура;
ФНТ 1,2 – силовые модульные фильтрации согласования напряжений и
ограничения токов на входе и выходе электронного преобразователя;
П – преобразователь;
М – электродвигатель;
ДС – датчик скорости.
Управляющая часть:
КИ – коммуникационный интерфейс;
ИП – источник питания;
Вв./выв. д.с. – ввод/вывод дискретных сигналов;
ПУ – пульт управления;
Вв./выв. а.с.- ввод/вывод аналоговых сигналов;
КП – контроллер привода;
ИД – интерфейс датчиков.
Схемы управления делятся на аналоговые и дискретные.
Рисунок 2 – График изменения уровня воды от времени
Рисунок 3 – Дискретный сигнал
Рисунок 4 – Разбиение кривой на дискретные сигналы
Рисунок 5 – Передача аналоговых сигналов без помех
АЦП – аналоговое цифровое преобразование;
ЦАП – цифровое аналоговое преобразование.
ИКМ – импульсно-кодовая модуляция.
1.1 Дискретные системы
В дискретных системах разделение сигнала может быть действительным или
мнимым. Действительное характерно для релейных схем.
Рисунок 6 – Действительное разделение сигнала
Мнимое представление сигнала характерно для интегральных схем,
поскольку там отсутствие выходного сигнала не означает, что на входе сигнала нет.
Рисунок 7 – Мнимое представление сигнала
H – высокий уровень выходного сигнала;
L – низкий уровень выходного сигнала.
Существует два типа логики: положительная и отрицательная. Сравнение этих двух
логик показано в таблице 1.
Таблица 1 – Сравнительная оценка двух логик
Напряжение, В
Уровень
«+» логика
«-» логика
5
H
1
0
0
L
0
1
Рисунок 8 – Интегральный элемент
В зависимости от функциональной связи между входными и выходными
сигналами различают дискретные устройства двух типов:
1) Комбинационные, у которых значение y определяется конкретными
значениями x в данный момент времени и не зависит от их состояния в
предыдущий момент (дешифраторы, мультиплексоры, преобразователи кодов и
т.д.).
2) Последовательностные.
Рисунок 9 – Последовательностное устройство
ДС – дискретная схема.
Электроприводы Схемы — Энциклопедия по машиностроению XXL
Регулирование скоростей и моментов основано на принципе сложения механических характеристик. Характерными примерами использования указанного принципа являются электроприводы, схемы и механические характеристики которых приведены на рис. 7-40. Двухдвигательный электропривод по схеме на рис. 7-40, а состоит из тормозной машины вихревого типа ТМ, имеющей механическую характеристику I, 1 (в IV квадранте) и основой асинхронной машины М с фазным ротором, работающей на характеристике 2 (или 2 ) в двигательном режиме с большим сопротивлением в цепи ротора. Суммарные характеристики 3 и 3 позволяют получить стабильную посадочную скорость в зоне моментов от
[c.159]
Характерными примерами использования указанного принципа являются электроприводы, схемы и механические характеристики которых приведены на рис. 7-40. Двухдвигательный электропривод по схеме на рис. 7-40, а состоит из тормозной машины вихревого типа ТМ, имеющей механическую характеристику I, 1 (в IV квадранте) и основой асинхронной машины М с фазным ротором, работающей на характеристике 2 (или 2 ) в двигательном режиме с большим сопротивлением в цепи ротора. Суммарные характеристики 3 и 3 позволяют получить стабильную посадочную скорость в зоне моментов от
[c.159]
На рис. 39 показана схема простейшей испытательной машины рычажного типа. От червяка 1 вручную или Посредством электропривода поворачивается червячное колесо 2, смещающее вниз силовой винт 3. В образце 4 возбуждается, таким образом, усилие, которое через рычаги 5, 6, 7 уравновешивается весом груза Р на плече а. На рычаге 7 имеется градуировка в единицах силы, приходящейся на образец. Перемещение груза по рычагу может осуществляться не только вручную, но и автоматически.
[c.50]
Перемещение груза по рычагу может осуществляться не только вручную, но и автоматически.
[c.50]
На рис. 11.17, а дана кинематическая схема одного из промышленных роботов с приводами, а на рис. 11.17, б—структурная схема его основного рычажного механизма и упрощенная блок-схема автоматического управления манипулятором. Манипулятор Г1Р (рис. 11.17, а) имеет 5 степеней свободы (W = 5) и соответственно 5 отдельных приводов D, D , Оз, — электродвигатели и Dg — пневмопривод. Двигатель D, через червячную передачу приводит во вращательное движение вокруг вертикальной оси звено / двигатель Dg с помощью винтовой передачи (винт—гайка) перемещает поступательно (вверх-вниз) звено 2 двигатель D3 с помощью такой же передачи сообщает горизонтальное поступательное движение (вправо-влево) звену 3 электропривод О4 посредством червячной передачи осуществляет вращательное движение схвата 4 вокруг горизонтальной оси пневмопривод раскрывает и закрывает губки схвата 5 путем преобразования поступательного движения поршня посредством рычажного механизма. [c.332]
[c.332]
Для вывода из ЭВМ результатов проектирования в виде чертежей, имеющих необходимые пояснительные тексты, применяются графопостроители (ГП), которые представляют собой станки с числовым программным управлением, режущий инструмент которых заменен пишущим узлом, а в качестве исполнительного органа, как правило, применяются электроприводы, осуществляющие перемещения пишущего узла по взаимно перпендикулярным осям. В основе работы ГП лежит преобразование команд ЭВМ в цифровой форме в пропорциональные перемещения пишущего узла. Общая структурная схема ГП представлена на рис. 2.6. Информация в ГП может поступать непосредственно от ЭВМ через канал связи. Однако если объем информации велик, то целесообразно использовать автономный режим работы ГП, вводя данные с перфокарт, перфолент или магнитных лент. Кроме показанных устройств ввода могут также использоваться гибкие магнитные диски и кассетные магнитные ленты. Обычно пишущий узел для выполнения чертежей снабжается набором специальных перьев, обеспечивающих различную толщину линий. [c.35]
[c.35]
Укрупненная схема алгоритма определения рабочих показателей двухдвигательного электропривода представлена на рис. 6.23. Обратим внимание на его особенности. Для расчета параметров схем замещения двигателей на каждой частоте вращения необходимо задаться некоторыми начальными приближениями по ЭДС Е и Е» (надстрочные индексы обозначают принадлежность соответственно к первому и второму двигателям), а при последовательном соединении обмоток — по напряжению, подводимому к двигателям, 7/и и».Ь дальнейшем по заданным значениям ЭДС (напряжений — для последовательного соединения обмоток) определяются приближенные значения параметров Хо, г о для каждого двигателя. Теперь, зная расчетные параметры схемы замещения, можно определить ЭДС (напряжения) и сопоставить их с заданными вначале. Если при этом окажется, что хотя бы у одного двигателя относительная разность ЭДС 8Е (напряжений 5Т ,) больше допустимого уровня (5 Г/отах) расчет параметров схемы замещения
[c. 236]
236]
На рис. 39 показана схема простейшей испытательной машины рычажного типа. От червяка 1 вручную или посредством электропривода поворачивается червячное колесо 2, смещающее вниз силовой винт 3. В образце 4 возбуждается, таким образом, усилие, которое через рычаги 5, 6, 7 урав- [c.55]
Для получения монокристалла по методу вытягивания из расплава тщательно очищенный от примесей германий расплавляют в установке, схема которой показана на рис. 8.11. Рабочим объемом служит герметическая водоохлаждаемая камера, внутри которой создается вакуум порядка 10 Па, или защитная газовая среда (из водорода или аргона высокой чистоты). Материал (М) помещается в тигель (А), насаженный на конец водоохлаждаемого штока (Б-1). Шток Б-1 при помощи электропривода приводится во вращение со строго постоянной скоростью. Кроме того, его можно опу- [c.283]
В 1933 г. почти 100% станков на новых предприятиях имели индивидуальный электропривод с полуавтоматическим и автоматическим управлением.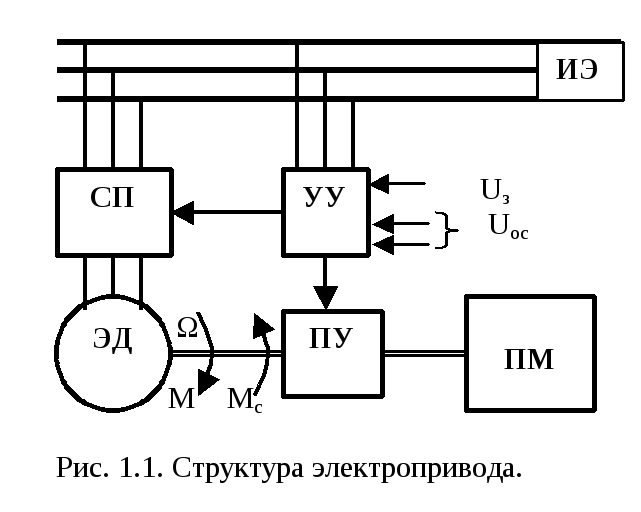 В 1934 г. завод Электросила начал выпускать серии высокоскоростных двигателей с электрическим регулированием скорости вращения. Все шире внедряется многодвигательный привод. Показательным примером полной электрификации, проведенной во второй пятилетке, являлся автомобильный завод имени Лихачева в Москве. В ряде его цехов были приняты схемы полуавтоматического и автоматического действия механизмов на базе многодвигательного привода с релейно-контакторной аппаратурой управления.
[c.114]
В 1934 г. завод Электросила начал выпускать серии высокоскоростных двигателей с электрическим регулированием скорости вращения. Все шире внедряется многодвигательный привод. Показательным примером полной электрификации, проведенной во второй пятилетке, являлся автомобильный завод имени Лихачева в Москве. В ряде его цехов были приняты схемы полуавтоматического и автоматического действия механизмов на базе многодвигательного привода с релейно-контакторной аппаратурой управления.
[c.114]
Электроприводы мощных экскаваторов выполняются, как правило, по схеме генератор — двигатель и развиваются в направлении увеличения мощностей и количества приводных двигателей (многодвигательные агрегаты). В схеме управления приводами экскаваторов все более внедряются элементы новой техники — магнитные усилители и полупроводники, обеспечивающие большую надежность и простоту по сравнению с электромашинными системами управления [15, 17]. [c.122]
В начальный период развития электропривод копировал старую схему группового привода с раздачей движущей механической энергии по рабочим машинам через трансмиссионные (главным образом) передачи. По этой схеме силового привода между электродвигателем, обладающим высоким к. п. д., и рабочим механизмом, на котором (или с помощью которого) рабочий производил продукцию, находилась длинная передаточная цепочка, где терялись преимущества электродвигателя.
[c.11]
По этой схеме силового привода между электродвигателем, обладающим высоким к. п. д., и рабочим механизмом, на котором (или с помощью которого) рабочий производил продукцию, находилась длинная передаточная цепочка, где терялись преимущества электродвигателя.
[c.11]
Электрический привод прокатных станов стал внедряться после того, как появилась схема генератор—электродвигатель. В этой схеме генератор обеспечивает синхронность работы всех электродвигателей, их реверсивность и изменение частоты вращения. Подобные схемы электропривода стали применять в сложных и крупных станках, например строгальных. [c.13]
Значение схем генератор — двигатель и электрического вала можно отчетливо видеть на примере совершенствования бумагоделательных машин. До применения электропривода бумагоделательные машины развивали скорость до 60 м/мин при ширине бумажного полотна (газетная бумага) в 1,89 м. Современные бумагоделательные машины имеют скорость 600—
[c. 13]
13]
Таким образом, применение схемы генератор—двигатель и осуществление привода на принципе электрического вала позволили завершить охват электроприводом силовых процессов в производстве. [c.14]
По указанным схеме и принципу переведены на электропривод такие сложные агрегаты, как прокатные станы, шахтные подъемники и скоростные лифты высотных зданий, скиповые подъемники доменных печей, бумагоделательные и газетные машины, экскаваторы и сложные станки. [c.14]
В 1935 г. Всесоюзный электротехнический институт имени В. И. Ленина разработал схему электропривода с выпрямительным тиратронным устройством, в 1939 г. эта схема была усовершенствована с выпрямительным агрегатом в виде тиратрона, или ртутного выпрямителя. Первая крупная промышленная установка была осуществлена в 1940 г. на одной из угольных шахт, где питание электропривода осуществлялось от управляемого ртутного выпрямителя. С 1949 г. ртутные выпрямители стали широко применять в СССР для питания главных электроприводов прокатных станов. [c.14]
[c.14]
Автоматические поточные линии являются прообразом предприятий будущего. Эти линии обеспечивают механизацию всего процесса, начиная от обработки сырых материалов до маркировки и упаковки готовых изделий или продуктов. Роль рабочего на автоматической линии заключается в наблюдении, контроле и управлении производственным процессом. Основой автоматических линий является электропривод, который обеспечивает единый темп работы входящих в линию станков, транспортировку обрабатываемых изделий и механизм автоматического управления всем процессом. В автоматических линиях действует большое число электродвигателей, связанных по схеме электрического вала. [c.15]
В первый период развития электропривод копировал старую схему группового привода прежних машин, в которых к общему валу через трансмиссии присоединялись остальные станки или механизмы. При этой схеме силового привода между электромотором, обладающим высоким КПД, и рабочим механизмом, на котором (или с помощью которого) рабочий производил продукцию, находилась длинная передаточная цепочка, в которой бесполезно тратилась энергия и терялись преимущества электродвигателя. [c.24]
[c.24]
В бумажной и металлургической промышленности электропривод произвел подлинную техническую революцию. Особенно эффективным здесь оказалась схема генератор—электродвигатель. Схема состоит из генератора, который вырабатывает электроэнергию, и [c.26]
Значение схемы генератор—двигатель и электрического вала можно отчетливо видеть на примере совершенствования бумагоделательных машин. До применения электропривода бумагоделательные машины развивали скорость до 60 м/мин при ширине бумажного полотна (газетная бумага) 1,89 м. Современные бумагоделательные машины имеют скорость 600— 900 м/мин при ширине бумаги до 9 м . Наиболее крупные бумагоделательные машины имеют более 50 индивидуальных электроприводов общей мощностью свыше 5 тыс. кВт. [c.27]
С целью удешевления многодвигательного электропривода постоянного тока советские конструкторы предложили заменить генератор постоянного тока на более экономичную схему — с применением ртутных, а впоследствии кремниевых выпрямителей. [c.28]
[c.28]
Компрессорная станция—потребитель электроэнергии первой категории. Отключение питания от энергосистемы либо от автономного источника питания всего на несколько секунд приводит к полному прекращению технологического процесса. В связи с этим основными направлениями работы специалистов газовой промышленности являются направления по устранению недостатков в работе электрооборудования КС, т.е. повышению его надежности. Сравнительная простота обслуживания, быстрота пуска, экономичность — преимущества электропривода по сравнению с газотурбинным приводом. К недостаткам следует отнести полную зависимость от внешнего энергоснабжения, трудность регулирования и недопустимость больших отклонений от расчетных технологических режимов. Работа в условиях Севера выдвигает повышенные требования к фундаментам, технологической обвязке, схеме электроснабжения, надежности средств автоматики, защиты и т.д. Опыт эксплуатации ГПА с электроприводом СТД-12500 выявил ряд особенностей режимов работы синхронного двигателя, а также существенные недостатки-и недоработки схем автоматического управления и защит электродвигателя. Устранение их очень важно, поскольку на газопроводах продолжается установка таких агрегатов и разрабатываются новые мощностью 25 тыс. кВт. Преимущества электропривода, такие как компактность, простота монтажа и эксплуатации, высокий К.П.Д., стабильная мощность, общеизвестны. Однако низкая
[c.25]
Устранение их очень важно, поскольку на газопроводах продолжается установка таких агрегатов и разрабатываются новые мощностью 25 тыс. кВт. Преимущества электропривода, такие как компактность, простота монтажа и эксплуатации, высокий К.П.Д., стабильная мощность, общеизвестны. Однако низкая
[c.25]
Наибольшее распространение на КС получили ABO, так как они не требуют предварительной подготовки теплоносителя, имеют простые схемы, надежны в эксплуатации и состоят из секций оребренных теплообменных труб с различной длиной (3—10 м), вентиляторов с электроприводом диффузоров и жалюзи (регулировки расхода воздуха), несущих конструкций. Аппараты имеют развитые наружные поверхности с коэффициентом оребрения до 25. [c.132]
В схеме предусмотрена возможность промывки чистой водой элементов системы после окончания испытаний (закрывается вентиль 18, открывается вентиль 16, подается электропитание на клапан 29). Для повышения эффекта очистки систему промывают при давлении воды 10—12 атм, что обеспечивается плунжерным насосом 22 с электроприводом 23. Необходимую величину давления воды устанавливают дроссельным краном 24 и контролируют по манометру 20.
[c.195]
Для повышения эффекта очистки систему промывают при давлении воды 10—12 атм, что обеспечивается плунжерным насосом 22 с электроприводом 23. Необходимую величину давления воды устанавливают дроссельным краном 24 и контролируют по манометру 20.
[c.195]
В. И. Архангельский. Бесконтактные схемы управления электроприводами
[c.120]
Использование специальных схем с электромашинными, магнитными и электронными (в том числе, полупроводниковыми) усилителями в сочетании с различными корректирующими устройствами позволяет удовлетворить самые разнообразные требования, предъявляемые к электроприводу машинных агрегатов современных технологических машин. [c.6]
Лебедки кабельных кранов (подъемные и для передвижения тележек) выполняются по обычной для лебедок с индивидуальным электроприводом схеме. Они отличаются лишь большими диаметрами и длиналга барабанов в связи с большой канатоемкостью последних и высокими скоростями их. вращения.
[c.204]
вращения.
[c.204]
Мостовые краны с электроприводом. Схема меха]1изма передвижения мостового крана с электроприводом дана на фиг. 206, а. [c.239]
Между деаэратором и питательными насосами включены бустерные насосы с электроприводом. Схема включения главных питательных насосов одноподъемная регенеративные подогреватели высокого давления рассчитываются на полное давление питательной воды. [c.163]
Под механизмами с пневматическим приводом обычно понимают поршневые или роторные механизмы, входные звенья которых приводятся в движение энергией сжатого газа (воздуха). Они используются чаще всего в системах управления работой машины, а также в качестве ведущих в машинах, в которых применение других видов привода нецелесообразно. Например, если механизм работает во взрывоопасной среде, то для предупреждения искро-образовапия вместо электропривода применяют пневмопривод. На рис. 2.28 показана типичная схема пневмопривода механизма систем управления. Здесь под действием сжатого воздуха эластичрщя диафрагма I прогибается и перемещает шток 2. В исходное положение она возвращается пружиной 3 при снятии давления.
[c.24]
Здесь под действием сжатого воздуха эластичрщя диафрагма I прогибается и перемещает шток 2. В исходное положение она возвращается пружиной 3 при снятии давления.
[c.24]
В 5.1 было дано математическое описание электромеханического преобразования энергии в системе двух ЭМ, имеющих жесткую механическую связь через общий вал. При этом возможно параллельное или последовательное электрическое соединение обмоток. Механические характеристики каждого двигателя Л/1 и Л/а и суммарная характеристика М- двухдвигательпого асинхронного электропривода покаэаны на рис. 6.21, а схема замещения при последовательном соединении обмоток статоров — на рис. 6.22. Разработка алгоритма анализа рабочих показателей в такой системе сопряжена с проблемой определения параметров намагничивающего контура Хо, Го, которые зависят от часто- [c.235]
Следует также отметить, что в индивидуальном приводе резко сокращаются потери на холостые хода. Потери в групповом приводе неизбежны, и достигают больших величин из-за разновременной остановки или нераиномерности загрузки рабочих машин. Потери холостого хода имеют большое экономическое значение, так как, например, в токарных станках при их загрузке на 25—30% удельный расход электроэнергии (на единицу работы) возрастает почти в 2 раза. Следовательно, за счет больших холостых ходов при групповом приводе возрастают удельные расходы электроэнергии и увеличиваются издержки производства. Следуюштим этапом совершенствования электропривода был переход на индивидуальную схему соединения электромотора с механизмами. Такая схема электропривода обеспечивалась беспредельной дроби-мостью мощности электродвигателя с сохранением вы-
[c.25]
Потери холостого хода имеют большое экономическое значение, так как, например, в токарных станках при их загрузке на 25—30% удельный расход электроэнергии (на единицу работы) возрастает почти в 2 раза. Следовательно, за счет больших холостых ходов при групповом приводе возрастают удельные расходы электроэнергии и увеличиваются издержки производства. Следуюштим этапом совершенствования электропривода был переход на индивидуальную схему соединения электромотора с механизмами. Такая схема электропривода обеспечивалась беспредельной дроби-мостью мощности электродвигателя с сохранением вы-
[c.25]
Таким образом, применение схемы генератор—двигатель и осуществление привода на принципе электрического вала позволили завершить охват электроприводом силовых процессов в производсгве. По указанной схеме и принципу переведены на электропривод такие сложные агрегаты, как прокатные станы, шахтные подъемники и скоростные лифты высотных зданий, скиповые подъемы доменных печей, бумагоделательные и газетные машины, экскаваторы и сложные станки.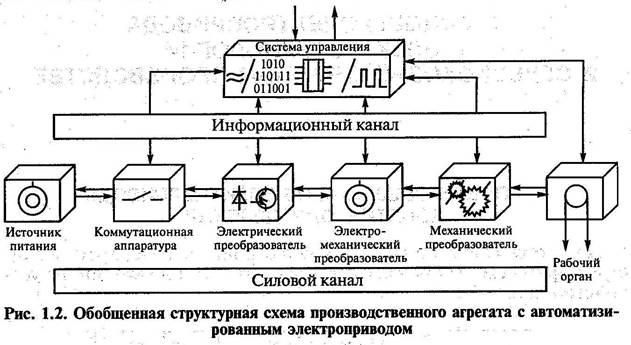 [c.27]
[c.27]
В 1935 г. Всесоюзный электротехнический институт разработал схему электропривода с выпрямительным тиратрояным устройством, затем в 1939 г. эта схема была усовершенствована с выпрямительным агрегатом в виде тиратрона, или ртутного выпрямителя. [c.28]
В данное время с появлением полупроводниковой техники выпрямители из полупроводников ршрают огромную роль в дальнейшем совершенствовании электропривода, работающего по схеме электрического вала. [c.28]
Схема основных магистральных газопроводов ЕГСС приведена на рис. 1.4. По состоянию на конец 1990 г. в структуре МГ около 55% (по протяженности) занимают газопроводы диаметром 1020, 1220 и 1420 мм. Пропускная способность МГ диаметром 1420 мм 31-33 млрд.м в год, максимальное рабочее давление равЯо 7,6 МПа. На компрессорных станциях установлено 5,6 тыс. газоперекачивающих агрегатов (ГПА) суммарной мощностью, превыщающей 45 млн. кВт. Доля ГПА с электроприводом (по суммарной мощности) составляет около 15%.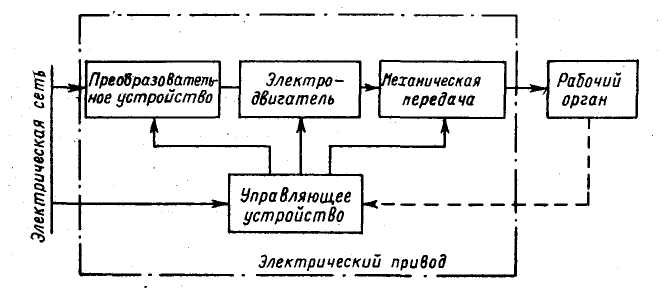 Максимальная установленная единичная мощность ГПА равна 25 МВт (с газотурбинным и электроприводами).
[c.26]
Максимальная установленная единичная мощность ГПА равна 25 МВт (с газотурбинным и электроприводами).
[c.26]
Вертикально-фрезерный станок мод. МА655 с фазовой системой управления разрабЬтан ЭНИМС совместно с заводом Станкокон-струкция , в этом станке программируется вертикальное перемещение шпинделя, продольное и поперечное перемещения стола. Привод подач осуществлен по схеме двигатель—редуктор—шариковая винтовая пара. Применен тиристорный электропривод с использованием малоинерционных двигателей с гладким якорем типа ПГТ-2. В отличие от обычных двигателей, якорь здесь не имеет пазов, проводники размещаются непосредственно на поверхности якоря и крепятся эпоксидной смолой. Это позволило уменьшить диаметр якоря, его маховые массы и снизить индуктивность якорной обмотки, что улучшило условия коммутации и позволило увеличить быстродействие двигателя примерно в 40 раз (при N 2 кВт). [c.219]
Работы в области полупроводниковых логических элементов привели к созданию методики расчета оптимальных схем элементов, учитывающей как наихудшие, так и вероятностные сочетания значений параметров, к разработке способов повышения надежности элементов за счет построения избыточных структур и созданию различных полупроводниковых элементов и систем. Разработанные элементы нашли широкое применение для построения различных систем автоматического управления, в том числе телеавтоматической системы управления поточно-транспортными линиями. Была разработана единая серия полупроводниковых логических элементов общепромышленного назначения, в которую вошли логические и функциональные элементы, элементы времени, усилителр и блоки питания (рис. 47). Единая серия разрабатывалась совместно Институтом автоматики и телемеханики АН СССР, Всесоюзным научно-исследовательским институтом электропривода, Центральным научно-исследовательским институтом МПС, Конструкторским бюро Цветметавтоматика и рядом других организаций. Разработанная серия полупроводниковых логических элементов работает при колебаниях напряжения питания 20%, изменениях температуры окружающей среды от —45 до +60° С при частоте до 20 кгц.
[c.266]
Разработанные элементы нашли широкое применение для построения различных систем автоматического управления, в том числе телеавтоматической системы управления поточно-транспортными линиями. Была разработана единая серия полупроводниковых логических элементов общепромышленного назначения, в которую вошли логические и функциональные элементы, элементы времени, усилителр и блоки питания (рис. 47). Единая серия разрабатывалась совместно Институтом автоматики и телемеханики АН СССР, Всесоюзным научно-исследовательским институтом электропривода, Центральным научно-исследовательским институтом МПС, Конструкторским бюро Цветметавтоматика и рядом других организаций. Разработанная серия полупроводниковых логических элементов работает при колебаниях напряжения питания 20%, изменениях температуры окружающей среды от —45 до +60° С при частоте до 20 кгц.
[c.266]
Рассматривается расчетная схема (рис. 1), включающая электродвигатель постоянного тока с независимым или параллельным возбуждением Д, передачу П, преобразующую вращательное движение якоря в поступательное, и призматический стержень С, масса которого равномерно распределена по его длине. В работах [1, 2] содержится описание неустановившихся процессов, возникающих в подобных агрегатах при возмущении со стороны электропривода. Настоящая работа содержит описание процесса, вызываемого возмущающим воздействием на неприводной конец стержня. Решение такой задачи представляет очевидный при-
[c.147]
1), включающая электродвигатель постоянного тока с независимым или параллельным возбуждением Д, передачу П, преобразующую вращательное движение якоря в поступательное, и призматический стержень С, масса которого равномерно распределена по его длине. В работах [1, 2] содержится описание неустановившихся процессов, возникающих в подобных агрегатах при возмущении со стороны электропривода. Настоящая работа содержит описание процесса, вызываемого возмущающим воздействием на неприводной конец стержня. Решение такой задачи представляет очевидный при-
[c.147]
9.2 Структурная схема электромеханического преобразования энергии. Проект автоматизированного электропривода грузового лифта
Похожие главы из других работ:
Автоматизация подачи колес в оперативный склад
2. Структурная схема
Структурная схема автоматической машины показана на рисунке 1.
Рисунок 1. Структурная схема автомата:
ЗУ — загрузочное устройство;
ТМ — технологическая машина;
РУ — разгрузочное устройство;
КУУ — контрольно-управляющее устройство. ..
..
Автоматизированная система управления технологическим процессом работы АЭС
2. Структурная схема АСУ ТП
В технологический объект управления «Энергоблок АЭС» входит следующее оборудование:
основное и вспомогательное энергетическое оборудование;
технологическое оборудование общестанционных систем;
общестанционное и общеблочное…
Адаптивно-векторная система управления бездатчикового асинхронного электропривода
1. 4. СТРУКТУРНАЯ СХЕМА АД
Рисунок 2…
Модернизация системы автоматического регулирования подачи аргона донной продувки установки вакуумирования стали ЦВОКС СП ЧерМК ПАО «Северсталь»
3.1 Структурная схема
Структурная схема САР, с помощью которой будет осуществляться управление технологическим процессом подачи аргона, представлена на рисунке 3.1…
Проект консольно-вертикально фрезерного станка с разработкой привода вращательного движения шпинделя и конструкции шпиндельного узла
2.
 6.1 Структурная схема привода. Структурная сетка
6.1 Структурная схема привода. Структурная сетка
Рисунок 2.1 — Структурная схема привода
По структурной формуле строим структурную сетку привода (рисунок 2).
Рисунок 2…
Пульт проверки автомата подогрева стекла
3.3 Структурная схема
…
Расчет и моделирование системы автоматического управления длиной дуги плавильного агрегата
1. Структурная схема САУ
1.1 Разбиение системы на типовые элементы:
Рис.1. Структурная схема САУ.
Wу (p) — передаточная функция усилителя.
Wку (p) — передаточная функция корректирующего устройства.
Wпр (p) — передаточная функция преобразователя…
Расчет систем автоматического регулирования
4. Структурная схема САР
Структурная схема САР показывает виды звеньев, из которых она состоит, и способы их соединения между собой (рис. 12.). Все звенья на схеме условно изображаются в виде прямоугольников. Внутри которых записываются их передаточные функции. ..
..
Расчет тиристорного электропривода
4. Структурная схема САУ
Рис…
Система автоматического регулирования частоты вращения двигателя постоянного тока
5. Структурная схема
Используя передаточные функции всех элементов системы и функциональную схему, составим структурную схему САР.
Рис. 5.1 Структурная схема САР.
Рис.5.1.1 Структурная схема САР в числах…
Система автоматического управления скоростью резания при точении
3. Структурная схема САУ
Зная передаточные функции всех звеньев системы автоматического управления и связи между ними, составим структурную схему, которая показана на рисунке 3…
Система управления специального зубофрезерного полуавтомата
2.1 Структурная кинематическая схема
…
Система управления специального зубофрезерного полуавтомата
2.1.1 Структурная кинематическая схема
Кинематическая схема станка состоит из следующих цепей:
1) Цепь главного движения. Связывает вал электродвигателя с червячной фрезой.
Связывает вал электродвигателя с червячной фрезой.
2) где nдв и nфр — частоты вращение двигателя и фрезы;
2) Цепь деления (цепь обката)…
Структурная схема системы автоматического управления стабилизации силы резания
3.1 СТРУКТУРНАЯ СХЕМА САУ
Разработка структурной схемы САУ осуществляется на основе функциональной схемы системы (рисунок 2). В структурной схеме в отличие от функциональной должны быть определены все передаточные функции.
Рисунок 3…
Теплообменный аппарат для подогрева топливного газа на газоперекачивающем агрегате
2.2 Структурная схема ГПА
Газоперекачивающий агрегат (ГПА) — это сложная энергетическая установка, состоящая из множества элементов.
Основными составляющими частями типовых ГПА обычно являются (рис. 2…
Расчет тиристорного электропривода (Курсовая работа)
Содержание
Введение
1. Функциональная
Функциональная
схема тиристорного электропривода
2. Разработка
структурной схемы САУ
3. Синтез САУ
3.1 Расчет
контура тока
3.2 Расчет
контура скорости
4. Структурная
схема САУ
4.1 Определение
общей передаточной функции
4.2
Характеристическое уравнение
5. Определение
устойчивости
5.1 Определение
запаса устойчивости и быстродействия
по переходной характеристике
5.2 Определение
устойчивости по логарифмическим
частотным характеристикам
Заключение
Литература
Введение
Электрический
привод представляет собой электромеханическую
систему, обеспечивающую реализацию
различных технологических и производственных
процессов в промышленности, сельском
хозяйстве, на транспорте, коммунальном
хозяйстве и в быту с использованием
механической энергии. Назначение ЭП
Назначение ЭП
состоит в обеспечении движения
исполнительных органов рабочих машин
и механизмов и управлении этим движением.
Другими словами, ЭП, являясь энергетической
основой реализации технологических и
производственных процессов, во многом
определяет их качество, энергетические
и технико-экономические показатели.
Механическая
энергия вырабатывается приводом, который
преобразовывает другие виды энергии.
В зависимости от вида используемой
первичной энергии различают гидравлический,
пневматический, тепловой и электрический
приводы. В современном промышленном
производстве, коммунальном хозяйстве
наибольшее применение нашел электрический
привод, на долю которого приходится
более 60 % потребляемой в стране
электроэнергии. Такое широкое применение
ЭП объясняется целым рядом его преимуществ
по сравнению с другими видами приводов:
использование электрической энергии,
распределение и преобразование которой
в другие виды энергии, в том числе и в
механическую, наиболее экономично;
большой диапазон мощности и скорости
движения; разнообразие конструктивного
исполнения, что позволяет рационально
соединять привод с исполнительным
органом рабочей машины и использовать
для работы в сложных условиях — в воде,
среде агрессивных жидкостей и газов;
простота автоматизации технологических
процессов, высокий КПД и экологическая
частота.
Возможности
использования современных ЭП продолжают
постоянно расширяться, за счет достижений
в смежных областях науки и техники.
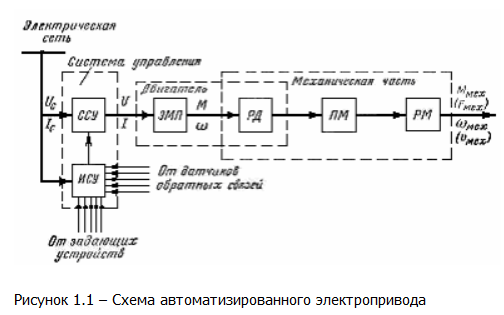
1. Функциональная
схема тиристорного электропривода
Функциональная
схема необходима для того, чтобы выяснить,
какие функциональные блоки необходимы
для реализации системы ЭП. Функциональная
схема содержит блоки преобразования
силовой энергии, двигатель, измерительные
преобразователи, согласующие устройства,
функциональные преобразователи, блоки
управления, датчики. По функциональной
схеме определяют, какие блоки необходимо
использовать при составлении структурной
схемы ЭП. Функциональная схема позволяет
определить, как проходит по схеме силовая
энергия (энергия, необходимая для
выполнения технологического процесса)
и по каким элементам схемы проходит
сигнал управления.
Функциональная
схема состоит из задающего устройства
ЗУ которое вырабатывает задающий сигнал
по скорости. Этот сигнал поступает на
Этот сигнал поступает на
усилитель регулятора скорости УС1, он
усиливает сигнал. Усилителю УС1 подчинен
контур регулирования тока который
состоит из: Тр
— трансформатора, который понижает
напряжение с 0,66 кВ до 230 В, БОСТ — блока
обратной связи по току и УС2 — регулятора
тока. Выходной сигнал регулятора тока
УС2 воздействует на систему импульсно
— фазового управления СИФУ. СИФУ
предназначена для преобразования
постоянного управляющего напряжения,
вырабатываемого системой автоматического
регулирования, в последовательность
прямоугольных управляющих импульсов
соответствующей фазы, подаваемых на
управляющие переходы тиристоров.
Тиристорный преобразователь ТП работает
в режиме управляемого выпрямителя и
подводит выпрямленное напряжение к
якорю двигателя. Обмотка возбуждения
двигателя ОВД запитывается от независимого
источника питания ИПОВД. Вращение
двигателя Д передаётся на механизм МЕХ.
Частота вращения двигателя контролируется
датчиком скорости ДС. Датчик скорости
вырабатывает ЭДС которая в виде сигнала
Uоc
по обратной связи поступает на элемент
сравнения С1, где происходит сравнение
входного сигнала Uвх
с сигналом поступающему по обратной
связи
Uоc:
ΔU
= Uвх
– Uос.
Если есть
разность между входным сигналом и
сигналом поступающему по обратной
связи, то происходит корректировка
частоты вращения двигателя.
Рис. 1 —
Функциональная схема электропривода
РС- регулятор
скорости;
РТ- регулятор
тока;
ДТ- датчик
тока;
ДС- датчик
скорости;
М- двигатель
постоянного тока;
ТП- тиристорный
преобразователь.
2. Разработка
структурной схемы САУ
В расчетных
системах управления ЭП для повышения
диапазона регулирования и качества
динамических процессов применяют
различные структуры построения
регуляторов, используются различные
обратные связи.
Для статического
и динамического расчета САУ необходимо
составить структурную схему, на которой
все элементы системы нужно представить
их передаточными функциями. Это двигатель,
Это двигатель,
ТП, регуляторы, датчики обратных связей
(рисунок 6).
Рис. 2
-Структурная схема САУ
Передаточная
функция ТП вместе с системой
импульсно-фазового управления, как
правило апроксируется апериодическим
звеном первого порядка с постоянной
времени Tmn
в пределах времени 0,006-0,01 с, что обусловлено
дискретностью подачи отпирающих
импульсов и особенностью работы ТП.
Передаточная
функция ТП имеет вид:
(5.1)
где Kmn
— коэффициент передачи ТП.
Коэффициент
передачи ТП изменяется в зависимости
от величины управляющего напряжения и
рассчитывается с использованием
регулировочных
характеристик Ed0
= f(α).
,
(5.2)
где ΔEd
— относительное значение ЭДС тиристорного
преобразователя, В;
ΔUy
— относительное значение напряжения,
В.
Электродвигатель
постоянного тока при подключении обмотки
возбуждения к постоянному напряжению,
работает с постоянной магнитным потоком.
Передаточная
функция имеет вид:
(5.3)
т.к. 4Тя>Тм,
Якорная цепь
ДПТ описывается передаточной функцией:
(5.7)
где Еn
— ЭДС преобразователя. В;
Едв
— ЭДС двигателя, В.
Передаточная
функция механической цепи ДПТ:
(5.5)
Поведение
угловой скорости вращения описывается
передаточной функцией электромеханического
преобразователя в соответствии с
основным уравнением движения ЭП:
(5.6)
Коэффициент
обратных связей рассчитывается по
формулам:
Коэффициент
обратной связи по скорости Кос
определяется по формуле:
(5. 7)
7)
где
=
10 В — максимальное напряжение управления;
—
максимальная скорость механизма, рад/с.
(5.8)
Коэффициент
обратной связи по току Кот:
Кот
= Кдт
∙ Кш
= 102,04∙0,0006 = 0,061 (5.9)
где Кдт
— коэффициент датчика тока;
(5.10)
где Кш
— коэффициент шунта.
Выбран шунт:
тип 75 ШСН-5;
Номинальный
ток: Iнш
=
75А;
Номинальное
падение напряжения: Uнш=
0,045 В.
Коэффициент
шунта Кш
определяем по формуле:
,
(5.11)
Коэффициент
обратной связи по напряжению Кон:
(5.12)
Выходной
координатой объекта управления является
угловая скорость вращения ωо,
а промежуточными: якорный ток, ЭДС
двигателя, напряжение якорной обмотки,
электромагнитный момент, магнитный
ток.
3. Синтез
CAУ
Для обеспечения
требуемых статических и динамических
параметров определим структуру системы.
Поскольку
необходимо регулировать скорость и
требуется динамика, то система должна
иметь контур скорости и контур тока.
Настройку контура обычно производят
так, чтобы получить технически оптимальный
переходный процесс, т.е. настройка на
технический оптимум.
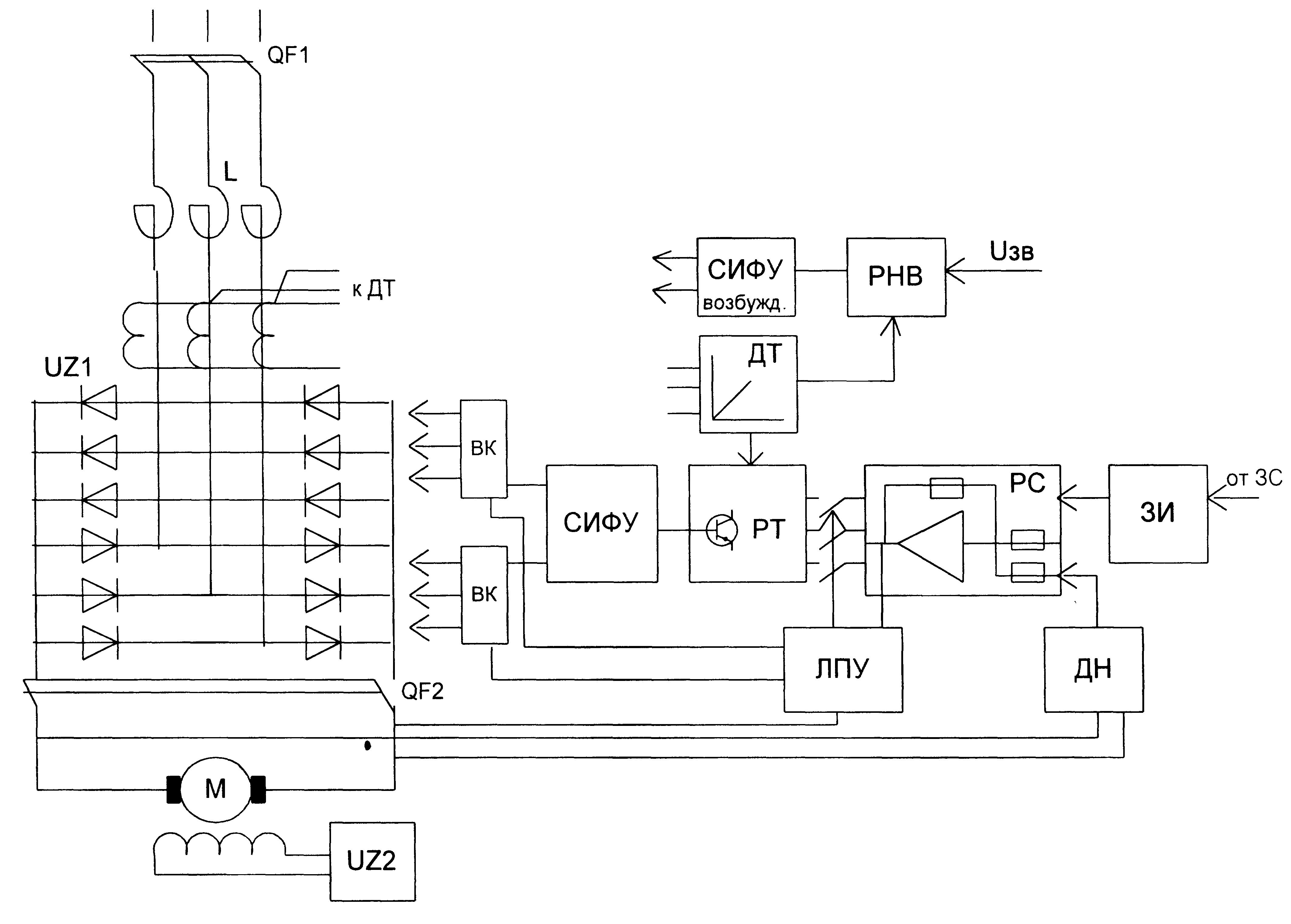
Принципиальная схема электропривода топливного насоса
На судах топливные насосы служат для заполнения топливом расходных цистерн. Автоматическое управление работой насоса обеспечивает необходимый уровень топлива в цистерне, откуда оно поступает к главным двигателям, дизель-генераторам и вспомогательным котлам.
Схема управления электроприводом топливного насоса приведена на рис. 1. Электропривод работает на переменном токе и имеет следующее оборудование: электродвигатель трехфазный с короткозамкнутым ротором мощностью 2,2 кВт, напряжением 220 В, частотой вращения 1420 об/мин; магнитный пускатель ПМ-1112, 220 В; пакетный выключатель ПК2-10 на ток 10 А, 250 В; пакетный переключатель режима работы ГППМ2-10/Н2 на ток 10 А, 250 В; поплавковые реле РП-52.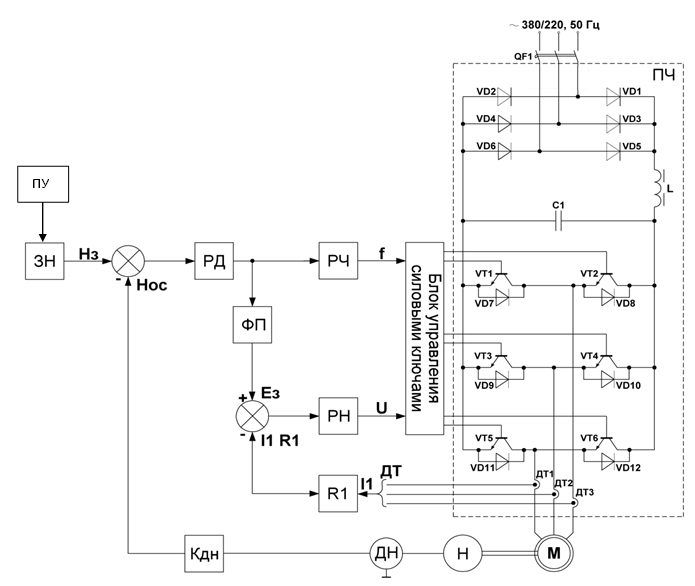
Переключателем S2 устанавливается ручное Р или автоматическое А управление насосом. При автоматическом управлении запуск и остановка электродвигателя происходят автоматически в зависимости от уровня топлива в расходной цистерне. Снижение уровня топлива до нижнего предела вызывает замыкание контакта поплавкового реле Е1, которое включает цепь питания катушки контактора К1: фаза С — предохранитель F1 — контакты К2.1, К3.1 — контакты S2.A — Е1, Е2 — К1 — S1 — F2 — фаза В. Контакты контактора К1 замыкаются, и электродвигатель запускается. Насос заполняет топливом цистерну.
Повышение уровня в цистерне вызывает размыкание контакта поплавкового реле Е1, но двигатель не выключается, так как контакт Е1 зашунтирован вспомогательным контактом К1.2. Дальнейшее повышение уровня топлива до верхнего предела приводит к размыканию контакта Е2. Контактором К1 останавливается электродвигатель.
Рис. 1. Принципиальная схема электропривода топливного насоса
Ручное управление электродвигателем осуществляется при установке переключателя S2 в положение Р.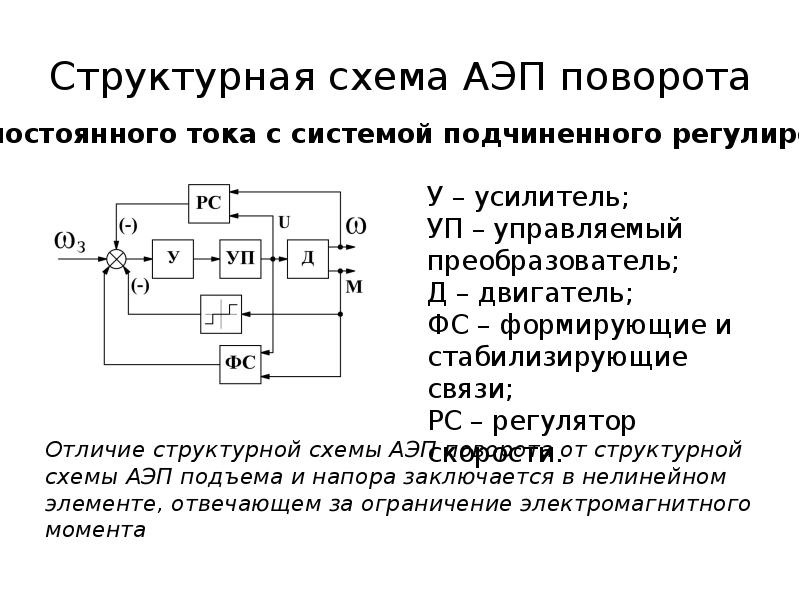 Оно служит для контроля работоспособности всей системы. Поплавковое реле нижнего уровня имеет дополнительный контакт Е1.1 для замыкания цепи аварийно-предупредительной сигнализации в случае опускания уровня топлива ниже минимально допустимого.
Оно служит для контроля работоспособности всей системы. Поплавковое реле нижнего уровня имеет дополнительный контакт Е1.1 для замыкания цепи аварийно-предупредительной сигнализации в случае опускания уровня топлива ниже минимально допустимого.
Правилами Речного Регистра РСФСР предусматривается, чтобы электрические двигатели топливных и маслоперекачивающих насосов были оборудованы дистанционными отключающими устройствами, находящимися вне помещений, где расположены насосы и сепараторы, и вне шахт машинных помещений, но в непосредственной близости от выходов из этих помещений. Эти требования в рассматриваемой схеме выполняются пакетным выключателем S1.
Что такое электрический привод? Работа, блок-схема и приложения
Существует так много механических операций, которые необходимо выполнять для домашних, коммерческих и промышленных работ с помощью машин с электрическим приводом. Такие приложения, как транспорт, прокатные станы, стиральные машины, вентиляторы, насосы, текстильная промышленность, роботы, нуждаются в электрических приводах.
Определение дисков
Системы, используемые для управления движением, называются «приводами».
Определение электроприводов
Определяется как электромеханическое устройство для преобразования электрической энергии в механическую для придания движения различным машинам и механизмам различного рода и управления технологическими процессами.И это может использовать любой из первичных двигателей, таких как — гидравлический, паровой двигатель, газопаровые турбины, дизель-бензиновые двигатели, и наиболее распространенным приводом является «электрический двигатель». Электродвигатели рассматриваются как «электроприводы».
Необходимость электропривода/Преимущества
Электропривод необходим по следующим причинам
Повышение эффективности: Эффективный контроль мощности, подаваемой на двигатель, повышает эффективность.
Контроль пускового тока: Может эффективно контролировать пусковой ток до безопасного значения. После этого двигатель может запуститься с безопасным значением тока.
После этого двигатель может запуститься с безопасным значением тока.
Точное управление: Точное регулирование скорости благодаря использованию силовых электронных устройств.
Защита: Предотвращает неблагоприятные условия эксплуатации, поэтому двигатель защищен.
Предварительный контроль: Учитывает другие факторы, такие как температура, колебания давления и т. д.
Блок-схема электропривода и основных компонентов (т.е. деталей)
Компоненты электропривода:
- Источник.
- Модулятор мощности.
- Мотор.
- Блок управления.
- Блок датчиков.
- Загрузка.
Рис. 1: Блок-схема электропривода
Работа электропривода
Загрузка
Обычно это машины, предназначенные для выполнения определенной работы (задачи). Это как насосы, роботы, стиральные машины, станки, дрели и т. д.
д.
Модулятор мощности и его функции
- Модулятор мощности модулирует поток мощности от источника к двигателю.См. блок-схему. Он соединяет источник и двигатель.
- Он действует как выпрямитель или инвертор, т. е. если источником переменного тока является двигатель постоянного тока, он преобразует переменный ток в постоянный, действуя как выпрямитель. Если источником является постоянный ток и он должен быть подключен к асинхронному двигателю, работающему от переменного тока, он действует как инвертор для преобразования постоянного тока в переменный ток переменной частоты.
- В таких операциях, как пуск, торможение, реверсирование скорости, ограничивает ток источника и двигателя в допустимом диапазоне (запасы).
- Помогает в выборе режима работы двигателя i.е. двигатель или торможение.
Принцип работы приводов и функции частей привода
Это электромеханическое устройство, которое преобразует электрическую энергию в механическую для придания движения различным механизмам, участвующим в управлении технологическими процессами.
Общая блок-схема электропривода
Блок-схема электропривода представлена на рис. 2.
Рис. 2: Общая блок-схема электропривода
Вход питания А.C. или DC подключен к двигателю через схему модуляции мощности. Входные параметры двигателя (напряжение, ток) и выходные параметры двигателя (крутящий момент, скорость) измеряются соответствующими датчиками. Механическая нагрузка подключена к двигателю. Данные датчика передаются контроллеру. Опорное значение устанавливается для максимального напряжения входного тока и желаемого крутящего момента, скорости и т. д. Входная мощность двигателя подается через схему модуляции мощности. Напряжение, ток, скорость, крутящий момент измеряются соответствующими датчиками.Пусковой ток регулируется подачей пониженного напряжения при пуске. Контроллер выдает импульсы и соответственно управляет схемой модуляции мощности. Входное напряжение также измеряется одновременно. Установлено задание, т. е. задана желаемая скорость. Датчик измеряет скорость и крутящий момент и выдает сигнал обратной связи. На основе сигнала обратной связи контроллер управляет схемой модуляции мощности. Схема модуляции мощности модулирует входную мощность (или напряжение) таким образом, чтобы была достигнута желаемая скорость.
задана желаемая скорость. Датчик измеряет скорость и крутящий момент и выдает сигнал обратной связи. На основе сигнала обратной связи контроллер управляет схемой модуляции мощности. Схема модуляции мощности модулирует входную мощность (или напряжение) таким образом, чтобы была достигнута желаемая скорость.
Преимущества электроприводов
Основные преимущества:
- Надежность.
- Универсальность управления скоростью.
- Регулирование скорости в широком диапазоне.
- Плавное регулирование скорости.
- Оптимизация и автоматизация улучшили статическое и динамическое поведение этих дисков.
- Использование инверторов на тиристорах. Использование преобразователей делает приводы более надежными и точными в работе.
- Установившиеся и динамические характеристики электроприводов могут быть сформированы в соответствии с требованиями нагрузки.
- Электроприводы имеют гибкие характеристики управления.

- Скорость можно легко контролировать.
- Скорость можно регулировать в широком диапазоне.
- Возможно электрическое торможение.
- Механизмы запуска, торможения, регулирования скорости очень просты и удобны в эксплуатации.
- Характеристики управления можно сделать более гибкими с введением:
- Тиристоры.
- Силовые транзисторы.
- БТИЗ.
- ИТО.
- ИС линейные/цифровые.
- Микрокомпьютеры.
- В соответствии с требованиями нагрузки возможно оптимальное изменение характеристик приводов.
- Скорость, крутящий момент и переходы из одного режима в другой можно регулировать очень плавно и даже бесступенчато.
- Высокие динамические характеристики и высокая эффективность могут быть достигнуты за счет реализации оптимальных стратегий управления.
- Для приводов может быть предусмотрена система автоматического обнаружения неисправностей.
- Для обеспечения автоматического управления операциями в нужной последовательности можно получить логические контроллеры и компьютеры.
- Специальность электродвигателей:
- Высокая эффективность.
- Малые потери холостого хода.
- Значительная кратковременная перегрузочная способность.
- Двигатели могут иметь различные конструкции, чтобы обеспечить их совместимость с различными нагрузками.
- Если сравнивать такие электроприводы с другими типами приводов, то:
- Срок службы электроприводов намного больше,
- Техническое обслуживание требуется намного меньше.
- Уровень шума ниже (и терпим).
- Операции сравнительно очень чистые.
- Если сравнивать с другими типами привода, то электроприводу не нужно ни топлива, ни дымовых газов, ни загрязнения воздуха.
- Мгновенный запуск и загрузка до полной нагрузки за меньшее время.
- Может работать во всех четырех квадрантах плоскости скорость-крутящий момент.
- Их работа возможна во всех средах, таких как взрывоопасная, радиоактивная среда, погружение в жидкости, вертикальная/горизонтальная установка.
- По сравнению с другими видами торможения электрическое торможение обеспечивает плавное замедление, что увеличивает срок службы компонентов/оборудования.
- Рекуперативное торможение обеспечивает значительную экономию энергии. Это недоступно в других системах.
- Преобразование электрической энергии в механическую и механической в электрическую осуществляется эффективно и экономично.

Недостатки электропривода
- Для этого привода требуется электропитание.Так что, если электропитание выходит из строя, он не может работать.
- Для продолжения работы требуется альтернативная схема подачи электроэнергии.
Части (компоненты) электропривода и функции каждого компонента
Как показано на блок-схеме электропривода, основными частями являются: нагрузка, модулятор мощности двигателя, блок управления и источник.
(А) Нагрузка
Компоненты момента нагрузки:
- Момент трения : Трение присутствует в подшипниках вала двигателя и других различных частях.
- Крутящий момент ветра: Когда двигатель работает, возникает ветер, и крутящий момент, противодействующий движению, называется крутящим моментом ветра.
- Крутящий момент, необходимый для выполнения полезной механической работы : Характер этого крутящего момента зависит от конкретного применения. Крутящий момент постоянен и не зависит от скорости в случае низкой скорости подъема. Момент нагрузки является функцией скорости в:
- Вентиляторы.
- Компрессоры, центробежные насосы, высокоскоростные подъемники, судовые винты и т.д.
(B) Типы двигателей
Обычно используемые двигатели в качестве приводов уже обсуждались ранее, например:
- Двигатели постоянного тока – параллельные, последовательные, составные, с постоянными магнитами мотор.
- Двигатели переменного тока – с короткозамкнутым ротором, с контактным кольцом, линейные.
- Синхронные двигатели – Поле обмотки, постоянное/магнитное.
- Бесщеточные двигатели постоянного тока.
- Шаговые двигатели.
- Импульсные реактивные двигатели.
Модуляторы мощности
Их можно разделить на три части:
- Преобразователи.
- Переменный импеданс.
- Коммутационные цепи.
Преобразователь: преобразователи переменного тока в постоянный
Переменный импеданс
Резисторы, катушки индуктивности, их комбинации со ступенчатыми или непрерывными вариациями для выравнивания токов в цепях используются
Цепи переключения
Они используются для:
- Изменение соединений двигателя для операций смены квадрантов.
- Для автозапуска/торможения.
- Работа в заранее заданной последовательности.
- Предотвращение неправильного срабатывания (для обеспечения блокировки).
- Отключение при нештатных ситуациях.
Электромагнитные реле большой мощности используются при выполнении коммутационных операций.
Источники
- Для малых приводов – 230 В переменного тока, одна фаза.
- Для средней и большой мощности – 440 вольт, 50 Гц, 3-фазный переменный ток.
- Для двигателей большой мощности – 3,3 кВ, 6,6 кВ, 11 кВ. Некоторые приводы питаются от батарей 6 В, 12 В, 24 В, 48 В и 11 В постоянного тока
.
Блок управления
Блок управления зависит от используемого модулятора мощности. Для полупроводниковых преобразователей блок управления состоит из схемы зажигания, использующей цифровую линейную схему и транзисторы, микропроцессора.
Выбор электропривода
При выборе конкретного диска для конкретной работы (нагрузки) необходимо учитывать множество факторов. Ниже приведены основные и важные факторы выбора привода (Выбор привода).
Ниже приведены основные и важные факторы выбора привода (Выбор привода).
1. Надежность работы во всем диапазоне нагрузок.
2. Стабильная работа требования, такие как:
- Рабочий цикл.
- Диапазон скоростей.
- Эффективность.
- Рейтинг.
- Квадранты работы.
- Регулировка скорости.
- Характер характеристики скорости/момента.
- Колебания скорости.
3. Необходимые источники, такие как:
- Величина напряжения.
- Тип источника напряжения (переменного/постоянного тока).
- Колебания напряжения.
- Для источника переменного тока – Коэффициент мощности.
- Гармоники.
- Гармоники, воздействующие на нагрузки.
- Приемлемость регенерируемой энергии.
4. Стоимость:
- Капитальные затраты.
- Текущие расходы.
- Стоимость обслуживания.
- Стоимость услуги.
5. Жизнь: ожидается больше жизни.
6. Емкость:
- Теплоемкость.
- Сервисная емкость.
- Рейтинг.
- Максимальный крутящий момент.
- Способность противостоять изменениям окружающей среды.
- Для удовлетворительной работы в типах локаций.
7. Ограничения:
- Ограничения по пространству.
- Ограничения по весу
8.Требования к переходным режимам:
- Значения ускорения.
- Значения замедления.
- Запуск производительности.
- Эффективность торможения.
- Реверсивное исполнение.
9. Потери энергии и ее стоимость.
10. Выбор также зависит от типа дисков.
11. Удельная мощность и объем двигателя.
12. Пригодность для работы в неблагоприятных условиях (Опасные условия).
13. Соответствие запасным частям, доступным на рынке.
Общее применение электроприводов
Важные моменты, касающиеся электроприводов:
- Обладают гибкими характеристиками управления.
- Диапазон регулирования крутящего момента, мощности, скорости – очень широкий.
- Можно запускать, часто останавливать.
- Широкий выбор рейтингов.
Поддерживает широкий спектр приложений, таких как:
- Прокатные станы.
- Текстильные фабрики.
- Краны.
- Бумажные фабрики.
- Морские приводы.
- Охлаждение.
- Кондиционер.
- Сахарный завод.
- Производственные отрасли.
- Маленькие, большие мастерские.
Блок-схема электрических приводов
Привод:
Комбинация Prime Mover, трансмиссионное оборудование и механическое Рабочая нагрузка называется приводом
Электропривод:
Электропривод можно определить как электромеханическое устройство для преобразования электрической энергии в механическую для придания движения различным машинам и механизмам. виды управления процессом.
виды управления процессом.
Блок-схема электрических приводов
Базовая блок-схема для электрических приводов, используемых для управления движением, показана на следующем рисунке1.1
совокупность электродвигателя, вала, передающего энергию, и управляющей аппаратуры, с помощью которой регулируются характеристики двигателя и варьируются условия их работы по отношению к механической нагрузке в соответствии с практическими требованиями, называется электроприводом.
Система привода = привод + нагрузка
1. Базовый компонент (или) Элементы Eletric Drives
Блок-схема электропривода:
· Груз: обычно механизм для выполнения определенной задачи. EG-болельщики, насосы, стиральная машина и т. Д.
EG-болельщики, насосы, стиральная машина и т. Д.
· Модулятор мощности : модуляторы (настроить или преобразователь) поток мощности от источника к движению
· Мотор: Актуальная конвертация энергии (электрическая на механическую)
· Источник: потребность в энергии для работы системы.
· Контроль: настройка характеристик двигателя и нагрузки для оптимального режима.
5
Модуляторы питания регулируют поток мощности от источника к двигателю, чтобы позволить двигателю разрабатывать характеристики крутящего момента, требуемые нагрузкой .
Общая функция модулятора мощности:
Ø Они преобразуют входную электрическую энергию в форму, необходимую для двигателей.
Ø Регулирует режим работы моторного двигателя, торможение регенеративное.
Модуляторы мощности можно классифицировать как
· Коммутационные цепи Переключатель режим работы
· Переменный импеданс
преобразователи
Они обеспечивают регулируемое напряжение / ток / частоту для контроля скорости контроля, выходной мощностью двигателя.
Различный тип преобразователей,
· AC в DC Rectifiers
· DC до DC Choppers
· AC для Choppers
· AC Контроллерам напряжения AC-AC (Уровень напряжения контролируется)
· Cyclo Converter (частота контролируется)
· DC к инверторам переменного тока
Коммутация коммутации
схемы необходимы для достижения любого из следующего.
· Изменение подключения двигателя для изменения его рабочего квадранта.
· Изменение параметров цепей двигателя дискретными шагами для автоматического управления пуском и торможением.
· Для операционных двигателей и приводов в соответствии с предварительномой последовательностью
· Для обеспечения взаимосвязей их за счет предотвращения малоперации
Ø Отключить в Нормальное состояние, например: электромагнитные контакторы,
ПЛК в управлении последовательностью и блокировкой, твердотельные реле и т. д.
Переменный импеданс
Ø Переменные резистенса обычно используются для дисков переменного тока и постоянного тока, а также для динамического торможения дисков
Ø полупроводниковые переключатели параллельно с фиксированным сопротивлением используется там, где требуется бесступенчатое изменение. катушки индуктивности, используемые для ограничения пускового тока двигателей переменного тока.
катушки индуктивности, используемые для ограничения пускового тока двигателей переменного тока.
Блок-схема электропривода, пример, применение, типы
Electric Drive представляет собой систему, состоящую из электродвигателей и цепей управления их скоростью или движением.Управление скоростью электродвигателя дискретными или переменными сигналами приводит к концепции системы электрического привода. Основная функция электрической системы заключается в максимально точном и точном контроле скорости двигателя. Кроме того, система электропривода обеспечивает безопасность и защиту двигателя. В настоящее время система электрического вывода использует электронные схемы и позволяет вводить цифровые данные через программное обеспечение, что делает систему электропривода более мощной, эффективной и точной.Система электропривода состоит из различных электронных схем, состоящих из электронных полупроводниковых устройств, таких как MOSFET, IGBT и т. д.
Блок-схема электропривода
Здесь вы можете увидеть типичную блок-схему системы электропривода.
Основные части системы электропривода описаны ниже.
Источник питания на входе
Тип источника питания на входе системы электропривода зависит от ее конструкции и требований.Может потребоваться источник питания переменного или постоянного тока. Источник входной мощности системы электропривода имеет схему выпрямителя, схему фильтра и схему регулятора. Блок обработки мощности (PPU) или модулятор мощности обычно потребляют только постоянный ток, даже если основным источником питания является переменный ток. Основная функция входной силовой цепи системы электропривода заключается в подаче питания на модулятор мощности и постоянном регулировании напряжения, что означает, что выход силовой цепи всегда будет постоянным, даже при колебаниях мощности или изменениях напряжения на входе системы.Он обеспечивает питание не только модулятора, но и других частей системы привода, таких как блок управления, блок датчиков (при необходимости) и т. д.
Блок обработки мощности (PPU) или модулятор мощности
Блок обработки мощности обрабатывать основной поток мощности от источника ввода к двигателю в соответствии с управляющим сигналом, поступающим от блока управления. Процесс выпрямления, процесс инверсии, процесс изменения частоты происходят в модуляторе мощности. Для управления двигателем постоянного тока модулятор сначала преобразует входной переменный ток в импульсные сигналы постоянного тока, чтобы обеспечить двигатель.Для управления двигателем переменного тока, если на вход подается постоянный ток, он преобразуется в источник переменного тока переменной частоты для питания двигателя. Так, для управления двигателем постоянного тока используется метод широтно-импульсной модуляции (ШИМ), а для управления двигателем переменного тока используется метод переменной частоты.
Процесс выпрямления, процесс инверсии, процесс изменения частоты происходят в модуляторе мощности. Для управления двигателем постоянного тока модулятор сначала преобразует входной переменный ток в импульсные сигналы постоянного тока, чтобы обеспечить двигатель.Для управления двигателем переменного тока, если на вход подается постоянный ток, он преобразуется в источник переменного тока переменной частоты для питания двигателя. Так, для управления двигателем постоянного тока используется метод широтно-импульсной модуляции (ШИМ), а для управления двигателем переменного тока используется метод переменной частоты.
Электродвигатель
Электродвигатель — это фактическое устройство или машина, которая выполняет физическую работу и работает под управлением мощности, поступающей от модулятора. Различные типы двигателей требуют различных систем электропривода.Как правило, все типы двигателей, такие как двигатель переменного тока, двигатель постоянного тока, универсальный двигатель, роботизированные двигатели, могут работать в системе привода.
Блок датчиков
Блок датчиков подключается к различным типам датчиков. Он определяет и измеряет скорость, крутящий момент, направление вращения двигателя. Он формирует сигнал обратной связи и подает его на блок управления.
Блок управления
Блок управления принимает как сигнал обратной связи от датчика, так и опорный сигнал от входного устройства и генерирует управляемый сигнал для подачи его на модулятор мощности.Блок управления состоит из электронных схем, устройств программирования и т. д.
Примеры системы электропривода
- ЧРП или частотно-регулируемый привод является примером системы электропривода.
- Винтовые компрессоры, сервомеханизм
- Конвейеры, приводы лифтов также являются примерами электроприводов.
Типы системы электропривода
- В зависимости от источника питания Электропривод двух типов — привод переменного тока и привод постоянного тока
- В зависимости от характера скорости также существует два типа — привод со стабильной скоростью и привод с переменной скоростью Привод
- В зависимости от количества двигателей, используемых для приложений — однодвигательный привод, многодвигательный привод
Применение системы электропривода
- Электропривод используется в тяговых системах.
- Электрический привод, используемый в промышленных устройствах управления двигателями, насосами, лифтами и т. д.
- Система электрического привода используется в транспортных системах, таких как электромобили.
Читайте также:
Благодарим Вас за посещение сайта. продолжайте посещать для получения дополнительных обновлений.
Что такое электрический привод? Типы, преимущества, недостатки
Электропривод определяется как электронное устройство, предназначенное для управления определенными параметрами двигателя для преобразования электрической энергии в механическую энергию точным контролируемым образом.
Электроэнергетические системы, используемые для управления движением, называются « Электрические приводы ».
Он состоит из сложной электронной системы или комбинации различных систем для управления движением.
Движение обеспечивается с помощью первичных двигателей.
Примерами первичных двигателей являются бензиновые двигатели, дизельные двигатели, газовые или паровые турбины, паровые двигатели, гидравлические двигатели и электрические двигатели.
Приводы Энергосистемы, в которых используются электродвигатели, называются электроприводами.
Блок-схема электрического привода
Современный электрический привод, способный с переменной регулируемой скоростью , состоит из некоторых важных частей, как показано на блок-схеме ниже.
Источник: Источник может быть источником постоянного или переменного тока.
Преобразователь мощности: Преобразователи переменного тока в постоянный, переменного тока в переменный, постоянного в постоянный, постоянного в переменный.
Двигатель: Преобразует электрическую энергию в механическую, является сердцем электрической системы.
Обычно используются двигатели
.
- Двигатели постоянного тока – последовательные, шунтирующие/параллельные двигатели постоянного тока, составные двигатели постоянного тока и двигатели постоянного тока с постоянными магнитами.
- Асинхронные двигатели с фазным ротором и линейные, с короткозамкнутым ротором.
- Бесщеточные двигатели постоянного тока
- Шаговые двигатели.
Загрузка: Это может быть машина для выполнения заданной задачи. Пример: Насос, Вентилятор, Станки.
Контроллер: мощность , необходимая для двигателя, обеспечивается контроллером.
Сенсор: В зависимости от требуемого типа управления поступают различные данные от датчиков. Примером является скорость, ток.
Типы электрических приводов
На основе поставки
В этой категории доступны два типа. Их
Приводы двигателей переменного тока
Привод переменного тока — это устройство, используемое для управления скоростью электродвигателя, такого как трехфазный асинхронный двигатель, путем изменения частоты электропитания двигателя.
Привод переменного тока
также называется частотно-регулируемым приводом (VFD) или частотно-регулируемым приводом (VSD).
Электроприводы постоянного тока
Это в основном система управления скоростью электродвигателя постоянного тока, которая подает напряжение на двигатель для работы на желаемой скорости.
Приводы постоянного тока
классифицируются как аналоговые приводы постоянного тока и цифровые приводы постоянного тока.
Цифровой привод постоянного тока обеспечивает точное управление.
На основе количества двигателей
В этой категории доступно три типа.Их
Индивидуальный
Для различных частей машины будет отдельный приводной двигатель.
Пример: токарный станок.
Мультидвигатель
Для приведения в действие различных частей машины предусмотрены отдельные двигатели.
Пример: Краны.
Групповой привод
В групповом приводе один двигатель используется как привод для двух или нескольких машин.
Двигатель соединен одним валом, другие машины соединены с валом ремнями и шкивами.
Групповой привод наиболее экономичен.
На основе скорости
В этой категории доступны два типа. Их
Привод с постоянной скоростью
Для станков требуются приводы с более или менее постоянной скоростью, используются асинхронные двигатели с короткозамкнутым ротором и ручное управление.
Преобразователь частоты
Основной целью привода с регулируемой скоростью является управление скоростью наряду с ускорением, замедлением, крутящим моментом и, наконец, направлением движения машины.
Используются для снижения энергопотребления.
На основе параметров управления
В этой категории доступно три типа. Их
Привод с векторным управлением
Векторное управление является наиболее точным, чем любой другой тип частотно-регулируемого привода (ЧРП).
В этом режиме управления крутящий момент и скорость управляются с помощью методов широтно-импульсной модуляции (ШИМ) в инверторе.
Используются для синхронных и асинхронных двигателей переменного тока.
Привод постоянной мощности
Когда двигатель при номинальном токе якоря обеспечивает постоянную мощность на всех скоростях в определенном диапазоне управления скоростью, это называется приводом с постоянной мощностью в этом диапазоне управления скоростью.
Привод с постоянным крутящим моментом
Привод с нагрузкой с постоянным крутящим моментом отличается при работе с фиксированными объемами.
Примерами являются винтовые компрессоры, питатели и конвейеры.
Преимущества электрических приводов
- Достаточная перегрузочная способность без потери срока службы машины.
- Работа в четырех квадрантах.
- Изменяемая характеристика крутящий момент-скорость.
- Период прогрева не требуется.
- Более высокая эффективность.
- Простое управление.
- Чистая работа, отсутствие загрязнения.
- Широкий диапазон скорости управление.
- Имеют гибкие характеристики управления.
- Может использоваться электрическое торможение
- Электроприводы могут быть снабжены системами автоматического обнаружения неисправностей.
- Электродвигатели имеют долгий срок службы, низкий уровень шума, более низкие требования к техническому обслуживанию и более чистую работу.
- Они могут быть запущены мгновенно и сразу могут быть полностью загружены.

Недостатки электрических приводов
- Высокая начальная стоимость из-за наличия силовых преобразователей и управляющей электроники.
- Требуется регулярное обслуживание и повышенное внимание.
Применение электрических приводов
Широко используется в
- Промышленное производство,
- производство и
- управление технологическим процессом.
Каталожные номера:
- Электрические машины С. Н. Али.
- Электроприводы Котари Д. П. Ракеш Сингх Лодхи.
 П. Ракеш Сингх Лодхи.
П. Ракеш Сингх Лодхи.Если вам понравилась эта статья, подпишитесь на наш канал YouTube для видеоуроков по ПЛК и SCADA.
Вы также можете подписаться на нас в Facebook и Twitter, чтобы получать ежедневные обновления.
Читать далее:
Об авторе
Инженер по реализации проектов
в
Инженеры и консультанты Tree-Tech
| + посты
Проницательный профессионал с 25-летним стажем работы инженером по КИП, начал карьеру в целлюлозно-бумажной промышленности.Со временем он перешел на электростанцию, целлюлозный завод, химические заводы (сероуглерод, хлор и серная кислота), нефть и газ (разведка и добыча).
Electric Drives — Блок-схема
Electric Drives — Блок-схема — EEES.IN
перейти к содержанию
от
eees.in
·
Опубликовано
· Обновлено
Электропривод можно определить как электромеханическое устройство для преобразования электрической энергии в механическую для придания движения различным машинам и механизмам для различных видов управления технологическими процессами.Это комбинация первичного двигателя, управляющего устройства, трансмиссионного оборудования и механической рабочей нагрузки, электродвигатель, используемый в качестве первичного двигателя.
Преимущества электроприводов
- Они имеют более длительный срок службы, чем другие приводные системы.
- Они не загрязняют окружающую среду и являются чистыми благодаря отсутствию топлива, дыма и т. д.
- Это более экономично.
- Легко передается электрическая энергия.
- Уровень шума электропривода меньше.
- Нет необходимости в хранении и транспортировке топлива.
- Обладает высокой эффективностью.
- Рекуперативное торможение возможно только в электроприводах.
- Доступны различные методы регулирования скорости.
- Они занимают меньше места.
- Надежный и экономичный источник энергии.
- Им можно управлять дистанционно.
- Доступны в широком диапазоне различных параметров, таких как скорость, крутящий момент и мощность.
- Электроэнергия может передаваться на большие расстояния по линиям электропередач.
Недостатки электроприводов
- Нельзя устанавливать там, где нет электричества. Для установки электродвигателя необходима электрическая энергия.
- При отказе электропитания система электропривода не работает.
- Может вызывать шумовое загрязнение.
- Первоначальная стоимость системы высока.

Блок-схема электропривода
В основном состоит из следующих компонентов:
- Источник: Источником может быть любое устройство переменного или постоянного тока, используемое в системе. 1 -Φ или 3 Φ, переменный ток 50 Гц в основном используется в системе привода в большинстве мест.
- Модулятор мощности: основной функцией модулятора мощности является модуляция потока мощности от источника к двигателю.Он модулирует мощность в соответствии с характеристиками крутящий момент-скорость, требуемыми нагрузкой. Он регулирует токи источника и двигателя в пределах некоторого требуемого значения. Он регулирует ток при пуске, торможении и некоторых режимах реверса скорости.
- Электродвигатель. Двигатель обычно используется в системе для преобразования электрической энергии в электрическую. Двигатели, используемые в электроприводах, являются асинхронными двигателями. Синхронные двигатели, двигатели постоянного тока, шаговые двигатели, а также реактивные двигатели.
- Механическая нагрузка: Нагрузкой может быть любая потребляющая мощность.Это машины, такие как вентиляторы, воздуходувки, насосы, роботы и машины, которые выполняют заданную задачу.
- Блок датчиков: Этот блок состоит из датчика тока или датчика скорости. Он определяет выходную скорость или требуемое количество. Скорость определяется в системе тахометром, который соединен с двигателем. Измерение тока требуется в системе для управления ограничением тока. Чувствительный блок непосредственно присоединен к управляющему блоку.
- Блок управления: Воспринимаемый выход передается на блок управления. В блоке управления измеренный выходной сигнал и требуемый выходной сигнал сравниваются, и некоторая входная команда дается контроллеру для получения требуемого выходного сигнала. В электроприводах используются различные типы регуляторов. Блок управления управляет работой модулятора мощности.
- Силовая передача (муфта/редуктор/цепь/ремень..)
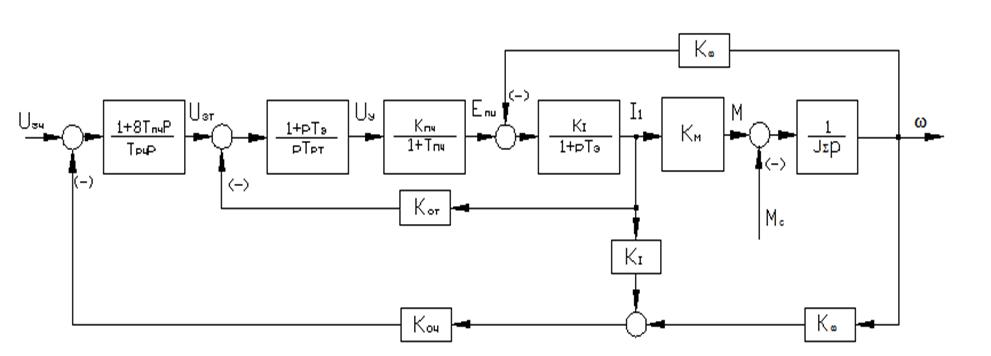
 В блоке управления измеренный выходной сигнал и требуемый выходной сигнал сравниваются, и некоторая входная команда дается контроллеру для получения требуемого выходного сигнала. В электроприводах используются различные типы регуляторов. Блок управления управляет работой модулятора мощности.
В блоке управления измеренный выходной сигнал и требуемый выходной сигнал сравниваются, и некоторая входная команда дается контроллеру для получения требуемого выходного сигнала. В электроприводах используются различные типы регуляторов. Блок управления управляет работой модулятора мощности. Факторы, определяющие выбор двигателя для электропривода
- Характер питания: Источник переменного тока / Чистый источник постоянного тока / Выпрямленный постоянный ток
- Электрические характеристики: Пусковые характеристики, рабочие характеристики, регулирование скорости, характеристики торможения
- Механические характеристики18 , Уровень шума, Система охлаждения, Типы подшипников, Способы передачи мощности, Типы корпусов.
- Характер привода: Индивидуальный, групповой привод
- Размер и мощность двигателей: Независимо от того, должен ли двигатель работать в непрерывном, прерывистом или переменном цикле нагрузки. являются адекватными.
- Стоимость : Капитальные затраты и текущие расходы.
 являются адекватными.
являются адекватными. Теги: Электроснабжение для тягиЭлектрическая тяга — требования и преимущества
Вам также может понравиться…
Ошибка
: Контент защищен !!
моделей электроприводов
— MATLAB & Simulink
Модели электроприводов
Модели электроприводов предназначены для инженеров многих специальностей, которые хотят
легко и точно включать электроприводы в моделирование своих систем.
Интерфейс представляет параметры выбранного диска в системной топологии,
тем самым упрощая настройки, которые пользователи могут захотеть привести к значениям по умолчанию.потом
они могут беспрепятственно использовать любые другие наборы инструментов или блоков для анализа времени или
частотное поведение электропривода, взаимодействующего с его системой. Модели
Модели
особенно полезен, когда необходимо осторожно маневрировать мощным приводом, не игнорируя
рабочие пределы нагрузки с одной стороны и источника питания с другой стороны. А
хорошим примером является система электропривода гибридного автомобиля, которая может переключаться в
миллисекунды от поворота колес до перезарядки аккумуляторов при выключенных тормозах.
увлеченный.
Инженеры и ученые могут легко работать с семью типичными постоянными токами (DC).
приводы, используемые в промышленности и транспортных системах, восемь переменного тока (AC)
приводы, обеспечивающие более эффективные и универсальные двигатели от тяги до позиционирования
устройства, а также модели валов и редукторов, полезные для подключения к двигателю модели
нагрузки из блоков Simulink ® . Дополнительным преимуществом моделей являются параметры, обеспечивающие
надежность двигателя, силовых преобразователей и системы управления.![]() Особенно
Особенно
внимание было уделено моторным моделям путем сравнения поведения моделей с
опубликованы данные основных производителей. Многочисленные примеры или тематические исследования типичных
диски поставляются с моделями. Будем надеяться, что типичные пользовательские системы аналогичны
эти проанализированные системы, тем самым экономя время на построение практической системы и
предоставление известной точки отсчета в анализе.
Чтобы получить доступ к моделям электроприводов, в командной строке MATLAB ® введите
введите:
Что такое электропривод?
Электропривод – система, осуществляющая преобразование электрического
энергии в механическую энергию с регулируемой скоростью.Это причина, по которой
электропривод также называют регулируемым приводом (ASD). При этом электропривод всегда
содержит регулирование тока (или крутящего момента) для обеспечения безопасного управления током для
мотор. Таким образом, крутящий момент/скорость электропривода могут соответствовать в установившемся режиме.
Таким образом, крутящий момент/скорость электропривода могут соответствовать в установившемся режиме.
характеристики момента/скорости любой механической нагрузки. Этот мотор механический
согласование нагрузки означает лучшую энергоэффективность и ведет к снижению затрат на электроэнергию.В
Кроме того, в переходный период разгона и торможения электрическая
привод обеспечивает быструю динамику и позволяет, например, плавный пуск и останов.
Растущее число приложений требует, чтобы крутящий момент и скорость изменялись в соответствии с механической нагрузкой.
Электрические транспортные средства, лифты, дисководы компьютеров, станки и др.
роботы являются примерами высокопроизводительных приложений, где желаемое движение по сравнению с
временной профиль должен отслеживаться очень точно.Насосы, вентиляторы, конвейеры и HVAC
примеры приложений со средней производительностью, где работа с переменной скоростью означает
энергосбережение.
Компоненты электропривода
Электропривод состоит из следующих основных компонентов:
На этой схеме показана базовая топология электропривода.
Базовая топология электропривода
В электроприводе используется двигатель постоянного тока или
двигатель переменного тока (AC).Тип используемого двигателя определяет мощность электропривода.
классификация на приводы с двигателями постоянного тока и приводы с двигателями переменного тока.
Силовой электронный преобразователь вырабатывает переменное переменное напряжение и
частоты от источника электроэнергии. Есть много типов преобразователей
в зависимости от типа электропривода. Приводы постоянного тока основаны на
выпрямители с фазовым управлением (преобразователи переменного тока в постоянный) или на прерывателях (преобразователи постоянного тока),
в то время как приводы двигателей переменного тока используют инверторы (преобразователи постоянного тока в переменный ток) или циклопреобразователи.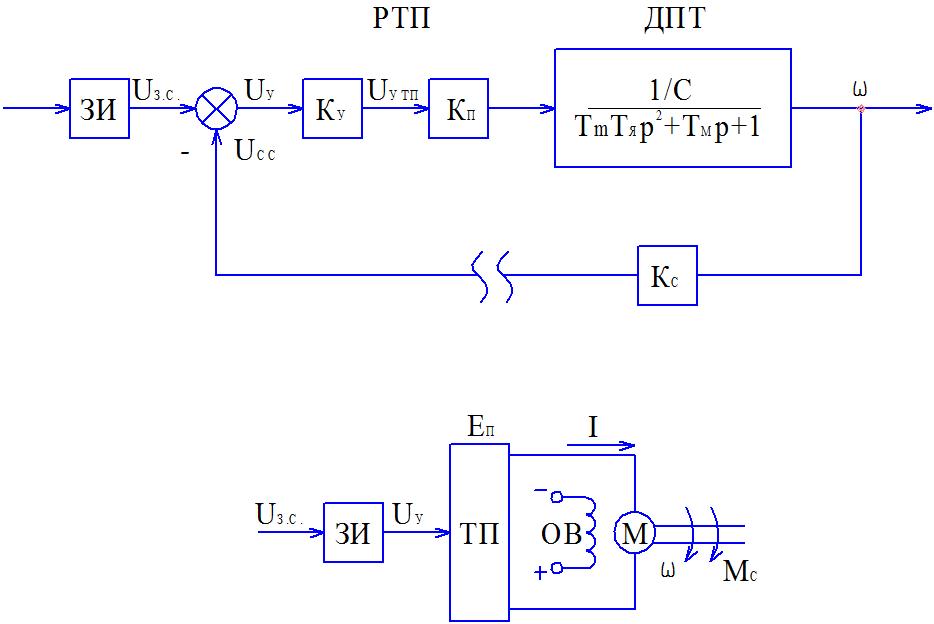
(преобразователи переменного тока).Основным компонентом всех силовых электронных преобразователей является
электронный переключатель, который либо полууправляемый (управляемый во включенном состоянии), как в
корпусе тиристора, либо полностью управляемые (управляемые в открытом и
в выключенном состоянии), как в случае IGBT (биполярный транзистор с изолированным затвором) и
GTO (тиристор отключения затвора) блокирует. Управляемая особенность
электронный переключатель — это то, что позволяет преобразователю производить переменный переменный ток
напряжение и частота.
Целью контроллера привода является преобразование нужного привода
профиль крутящий момент/скорость в запускающие импульсы для электронного преобразователя мощности,
принимая во внимание различные переменные привода (токи, скорость и т. д.),
датчики. Чтобы выполнить это преобразование, контроллер сначала основывается на
регулятор тока (или крутящего момента).![]() Текущий регулятор является обязательным, поскольку он
Текущий регулятор является обязательным, поскольку он
защищает двигатель, точно контролируя токи двигателя.Уставка (SP)
этого регулятора может питаться извне, если привод находится в режиме регулирования крутящего момента
или внутренне регулятором скорости, если привод находится в режиме регулирования скорости.
В моделях с электроприводом регулятор скорости включен последовательно с током.
регулятор и основан на ПИ-регуляторе, который имеет три важные особенности:
Скорость изменения SP ограничена, так что желаемая скорость изменяется постепенно.
к SP, чтобы избежать внезапных ступенчатых изменений.Выход регулятора скорости, который является SP для регулятора тока,
ограничены максимальным и минимальным потолком.Интегральный член также ограничен, чтобы избежать накрутки. Следующее
На рисунке показана блок-схема скорости на основе ПИ-регулятора.
контроллер.

Регулятор скорости на основе ПИ-регулятора
Многоквадрантный режим
определенный набор требований.Моментно-скоростные возможности электропривода
можно представить в виде графика зависимости скорости от крутящего момента, состоящего из четырех квадрантов. В
первый квадрант, электрический крутящий момент и знаки скорости оба положительны,
указывает на движение вперед, поскольку электрический крутящий момент направлен в направлении движения.
Во втором квадранте знак электрического момента отрицательный, а знак скорости
положительный, что указывает на торможение вперед, поскольку электрический крутящий момент противоположен
направление движения.В третьем квадранте знаки электрического момента и скорости
оба отрицательные, что указывает на обратное движение. В четвертом квадранте электрический
Знак крутящего момента положительный, а скорость отрицательная, что указывает на торможение задним ходом.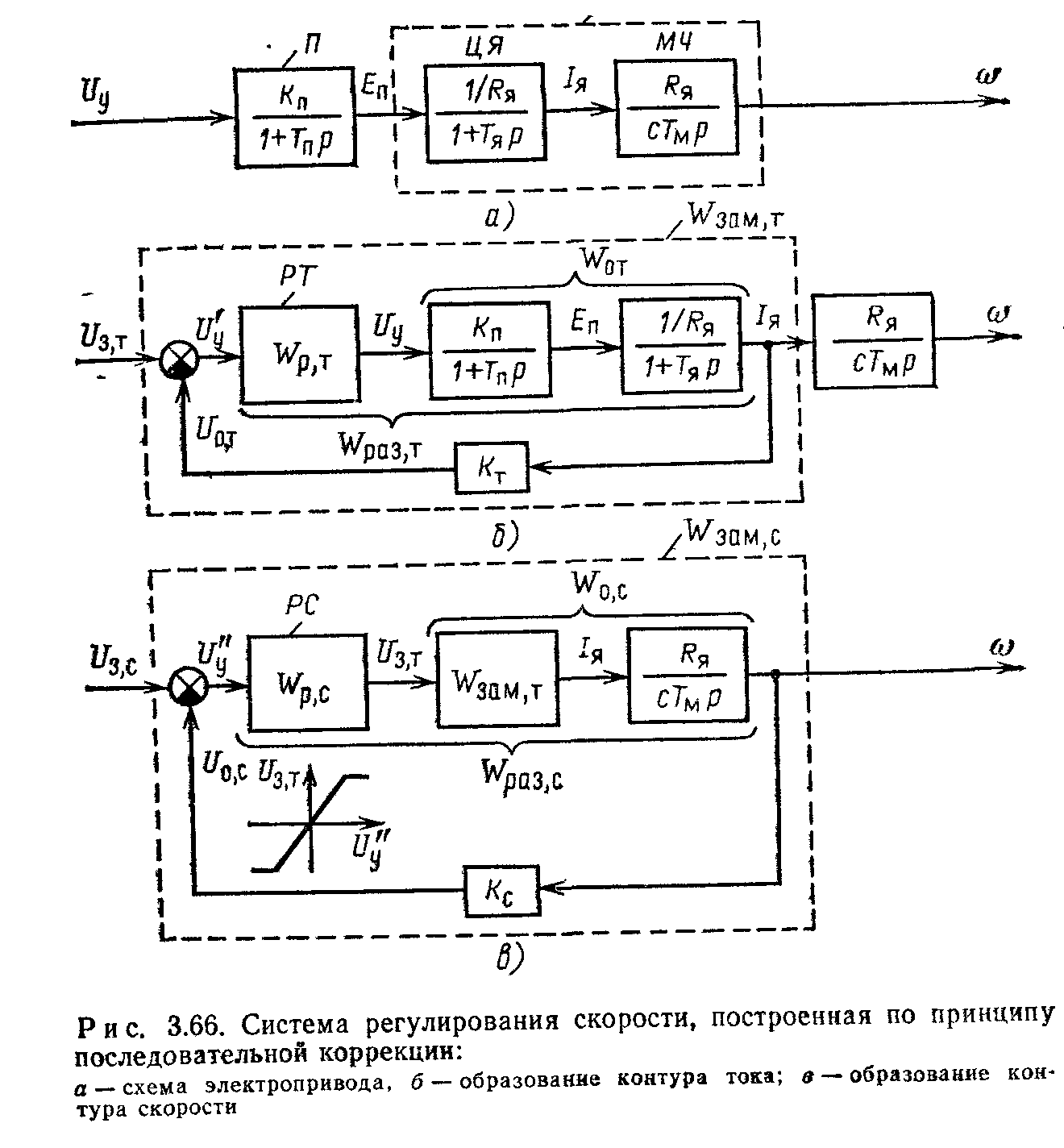 То
То
торможение привода осуществляется либо тормозным прерывателем (динамическое торможение), либо
двунаправленный поток мощности (рекуперативное торможение).
На этой схеме показана четырехквадрантная рабочая область электропривода.Каждый квадрант имеет область постоянного крутящего момента
от 0 до +/- номинальной скорости ω b и a
области, где крутящий момент уменьшается обратно пропорционально скорости от
ω b до максимальной скорости
ω макс . Этот второй регион является
области постоянной мощности и получается за счет уменьшения магнитного потока двигателя.
Четырехквадрантная работа электропривода
Модели среднего значения
Модели электроприводов допускают два уровня моделирования — детальное моделирование
или моделирования среднего значения.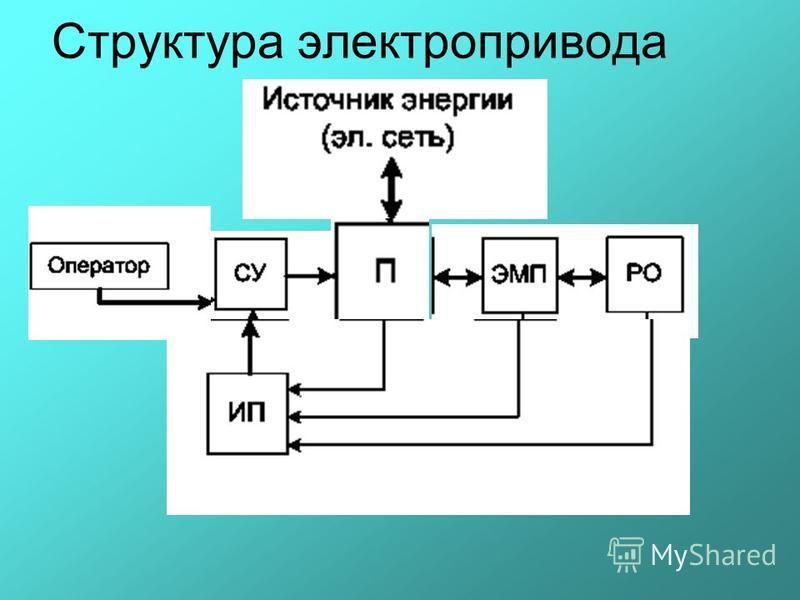 Подробные симуляции используют блок Universal Bridge для представления
Подробные симуляции используют блок Universal Bridge для представления
детальное поведение приводов, управляемых выпрямителями и инверторами. Это моделирование
уровень требует небольших временных шагов моделирования для достижения правильного представления
компоненты высокочастотного электрического сигнала приводов.
При моделировании средних значений используются модели средних значений силовых преобразователей.
При моделировании в режиме среднего значения электрические входные и выходные токи и
напряжения силовых преобразователей, приводящих в действие электродвигатели, представляют собой среднее
значения реальных токов и напряжений.При этом высокая частота
компоненты не представлены, и моделирование может использовать гораздо большие временные шаги.
Каждая модель среднего значения силового преобразователя описана в документации для каждого
Тип модели DC или AC.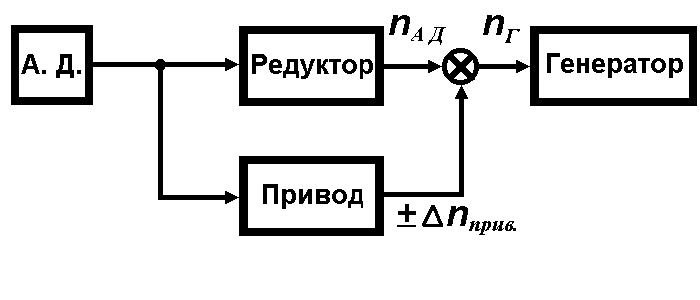 Временной шаг, используемый в приводе на уровне среднего значения, может
Временной шаг, используемый в приводе на уровне среднего значения, может
обычно увеличивается до наименьшего времени выборки контроллера, используемого в модели.
Например, если привод использует временной шаг 20 мкс для токового контура и 100 мкс
временной шаг для контура скорости, затем временной шаг симуляции в режиме среднего значения
можно увеличить до 20 мкс.Рекомендации по временному шагу симуляции приведены в
документация на каждую модель.
Электронное техническое решение: Детали электроприводов
Диаграмма, которая показывает базовую схему и компоненты привода, также показывает, что приводы имеют некоторые фиксированные части, такие как нагрузка, двигатель, блок управления модулятором мощности и источник. Это оборудование называется частью системы привода. . Теперь нагрузки могут быть разных типов, т. е. они могут иметь определенные требования и несколько условий, которые обсуждаются позже, прежде всего мы обсудим другие четыре части электроприводов, т. е.электродвигатель, модуляторы мощности, источники и блоки управления.
е.электродвигатель, модуляторы мощности, источники и блоки управления.
Электродвигатели бывают разных типов. Двигатели постоянного тока можно разделить на четыре типа: двигатель постоянного тока с параллельной обмоткой, двигатель постоянного тока с последовательной обмоткой, двигатель постоянного тока со сложной обмоткой и двигатель постоянного тока с постоянными магнитами. А двигатели переменного тока бывают двух типов — асинхронные двигатели и синхронные двигатели. Сейчас синхронные двигатели бывают двух типов – с круглым полем и с постоянными магнитами. Асинхронные двигатели также бывают двух типов – с короткозамкнутым ротором и с обмоткой. Помимо всего этого, шаговые двигатели и вентильные реактивные двигатели также считаются частями приводной системы.
Таким образом, существуют различные типы электродвигателей, и они используются в соответствии с их характеристиками и назначением. Когда электрические приводы не были так популярны, асинхронные и синхронные двигатели обычно применялись только там, где единственным требованием была фиксированная или постоянная скорость. А для приводов с регулируемой скоростью использовались двигатели постоянного тока. Но, как мы знаем, асинхронные двигатели того же номинала, что и двигатели постоянного тока, имеют различные преимущества, такие как меньший вес, меньшая стоимость, меньший объем и меньше ограничений по максимальному напряжению, скорости и номинальной мощности.По этим причинам асинхронные двигатели быстро вытесняют двигатели постоянного тока. Кроме того, асинхронные двигатели механически прочнее и требуют меньше обслуживания. Если рассматривать синхронные двигатели, синхронные двигатели с возбуждением и постоянными магнитами имеют более высокий КПД и коэффициент мощности при полной нагрузке, чем асинхронные двигатели, но размер и стоимость синхронных двигателей выше, чем у асинхронных двигателей для того же номинала.
А для приводов с регулируемой скоростью использовались двигатели постоянного тока. Но, как мы знаем, асинхронные двигатели того же номинала, что и двигатели постоянного тока, имеют различные преимущества, такие как меньший вес, меньшая стоимость, меньший объем и меньше ограничений по максимальному напряжению, скорости и номинальной мощности.По этим причинам асинхронные двигатели быстро вытесняют двигатели постоянного тока. Кроме того, асинхронные двигатели механически прочнее и требуют меньше обслуживания. Если рассматривать синхронные двигатели, синхронные двигатели с возбуждением и постоянными магнитами имеют более высокий КПД и коэффициент мощности при полной нагрузке, чем асинхронные двигатели, но размер и стоимость синхронных двигателей выше, чем у асинхронных двигателей для того же номинала.
Бесщеточные двигатели постоянного тока аналогичны синхронным двигателям с постоянными магнитами.Они используются для сервоприводов и в настоящее время используются как эффективная альтернатива серводвигателям постоянного тока, поскольку они не имеют недостатков, таких как проблема с комментариями. Помимо этого, шаговые двигатели используются для управления положением, а вентильные реактивные двигатели используются для управления скоростью.
Помимо этого, шаговые двигатели используются для управления положением, а вентильные реактивные двигатели используются для управления скоростью.
Модуляторы мощности — это устройства, которые изменяют характер или частоту, а также интенсивность мощности для управления электрическими приводами. Грубо говоря, модуляторы мощности можно разделить на три типа:
i) Преобразователи,
ii) Переменное сопротивление,
iii) Коммутационные цепи.
Как следует из названия, преобразователи используются для преобразования токов одного типа в другой тип. В зависимости от типа функции преобразователи можно разделить на 5 типов –
i. Преобразователи переменного тока в постоянный
ii. Регуляторы переменного тока
iii. Преобразователи или преобразователи постоянного тока
iv. Инверторы
v. Циклоконвертеры
Преобразователи переменного тока в постоянный используются для получения фиксированного источника постоянного тока из источника переменного тока фиксированного напряжения.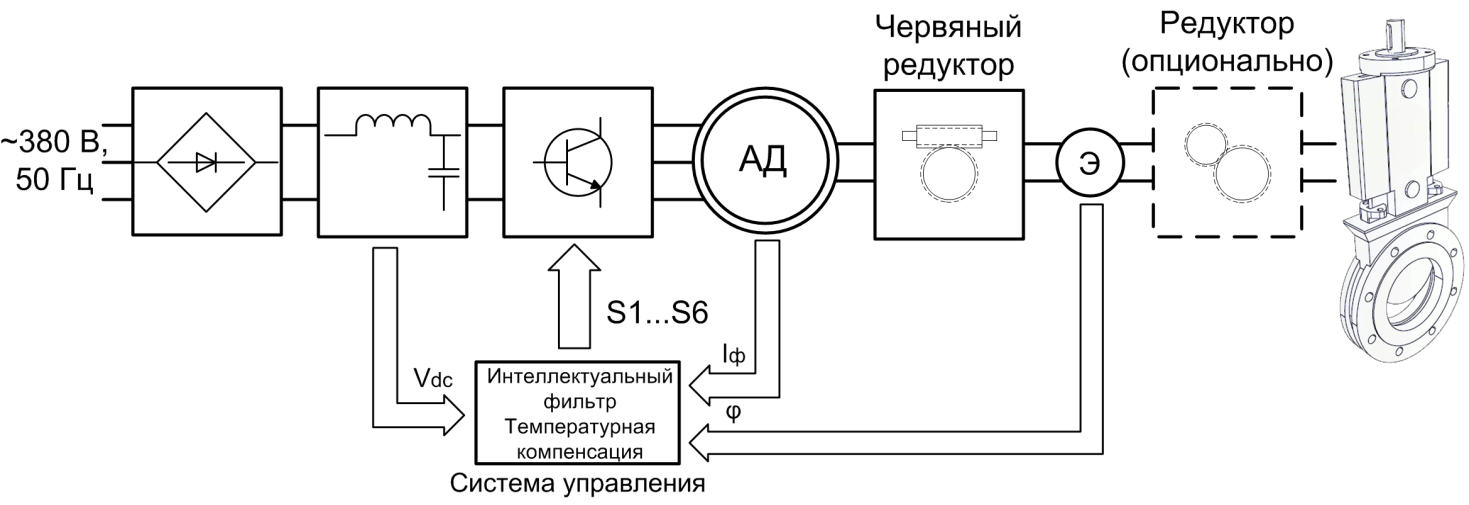 Самая базовая схема преобразователей переменного тока в постоянный выглядит так.
Самая базовая схема преобразователей переменного тока в постоянный выглядит так.
Преобразователь переменного тока в постоянный
Регуляторы переменного тока
используются для получения регулируемого напряжения переменного тока, в основном в этих регуляторах используются автотрансформаторы или трансформаторы РПН.
Преобразователь переменного тока в переменный
Преобразователи или преобразователи постоянного тока используются для получения переменного напряжения постоянного тока. Для этой цели в основном используются силовые транзисторы, IGBT, GPO, силовые МОП-транзисторы.
Преобразователь постоянного тока в постоянный
Инверторы используются для получения переменного тока из постоянного тока, работа прямо противоположна работе преобразователей переменного тока в постоянный.Полупроводники PWM используются для инвертирования тока.
Преобразователь постоянного тока в переменный
Циклопреобразователи
используются для преобразования фиксированной частоты и постоянного напряжения переменного тока в переменное напряжение и переменное напряжение. Тиристоры используются в этих преобразователях для управления сигналами запуска.
Тиристоры используются в этих преобразователях для управления сигналами запуска.
Преобразователь переменного тока в переменный
Переменные импедансы используются для управления скоростью путем изменения сопротивления или импеданса цепи. Но эти методы управления используются в недорогих приводах постоянного и переменного тока.Может быть две или более ступени, которые могут управляться вручную или автоматически с помощью контакторов. Для ограничения пускового тока в двигателях переменного тока используются катушки индуктивности.
Коммутационные цепи в двигателях и электроприводах служат для плавной работы двигателя, а также защищают машину при неисправностях. Эти схемы используются для изменения квадранта операций во время работы двигателя. И эти схемы реализованы для управления двигателем и приводами в соответствии с заданной последовательностью, для обеспечения блокировки, для отключения двигателя от главной цепи при любых ненормальных условиях или неисправностях.
Источники могут быть однофазными и трехфазными. Источник переменного тока 50 Гц является наиболее распространенным типом электроэнергии, подаваемой в Индии как для бытовых, так и для коммерческих целей. Синхронные двигатели, питающиеся от сети 50 Гц, имеют максимальную скорость до 3000 об/мин, а для достижения более высоких скоростей требуется более высокая частота питания. Двигатели малой и средней мощности питаются от источника питания 400 В, а также предусмотрены более высокие номиналы, такие как 3,3 кв, 6,6 кв, 11 кв и т. д.
Источник переменного тока 50 Гц является наиболее распространенным типом электроэнергии, подаваемой в Индии как для бытовых, так и для коммерческих целей. Синхронные двигатели, питающиеся от сети 50 Гц, имеют максимальную скорость до 3000 об/мин, а для достижения более высоких скоростей требуется более высокая частота питания. Двигатели малой и средней мощности питаются от источника питания 400 В, а также предусмотрены более высокие номиналы, такие как 3,3 кв, 6,6 кв, 11 кв и т. д.
Блок управления — выбор блока управления зависит от типа используемого модулятора мощности.Они бывают разных типов, например, когда используются полупроводниковые преобразователи, тогда блок управления состоит из цепей зажигания, в которых используются линейные устройства и микропроцессоры.
Итак, приведенное выше обсуждение дает нам простую концепцию о нескольких частях электрического привода.
.