
Виброускорение, виброскорость и виброперемещение. В чём измеряют вибрацию?
В чём измеряют вибрацию?
Для количественного описания вибрации вращающегося оборудования и в диагностических целях используют виброускорение, виброскорость и виброперемещение.
Виброускорение
Виброускорение – это значение вибрации, прямо связанное с силой, вызвавшей вибрацию. Виброускорение характеризует то силовое динамическое взаимодействие элементов внутри агрегата, которое вызвало данную вибрацию. Обычно отображается амплитудой (Пик, Peak) — максимальное по модулю значение ускорения в сигнале. Применение виброускорения теоретически идеально, т. к. пъезодатчик (акселерометр) измеряет именно ускорение и его не нужно специально преобразовывать. Недостатком является то, что для него нет практических разработок по нормам и пороговым уровням, нет общепринятого физического и спектрального толкования особенностей проявления виброускорения. Успешно применяется при диагностике дефектов, имеющих ударную природу — в подшипниках качения, редукторах. ((AdB-120)/20)
((AdB-120)/20)
Например, 140 дБ = уровень 10 м/с2 = 1 G
Виброскорость
Виброскорость – это скорость перемещения контролируемой точки оборудования во время её прецессии вдоль оси измерения.
В практике измеряется обычно не максимальное значение виброскорости, а ее среднеквадратичное значение, СКЗ (RMS). Физическая суть параметра СКЗ виброскорости состоит в равенстве энергетического воздействия на опоры машины реального вибросигнала и фиктивного постоянного, численно равного по величине СКЗ. Использование значения СКЗ обусловлено ещё и тем, что раньше измерения вибрации велись стрелочными приборами, а они все по принципу действия являются интегрирующими, и показывают именно среднеквадратичное значение переменного сигнала.
Из двух широко применяемых на практике представлений вибросигналов (виброскорость и виброперемещение) предпочтительнее использование виброскорости, так как это параметр, сразу учитывающий и перемещение контролируемой точки и энергетическое воздействие на опоры от сил, вызвавших вибрацию. Информативность виброперемещения может сравниться с информативностью виброскорости только при условии, когда дополнительно, кроме размаха колебаний, будут учтены частоты, как всего колебания, так и его отдельных составляющих. На практике сделать это весьма проблематично.
Информативность виброперемещения может сравниться с информативностью виброскорости только при условии, когда дополнительно, кроме размаха колебаний, будут учтены частоты, как всего колебания, так и его отдельных составляющих. На практике сделать это весьма проблематично.
Для измерения СКЗ виброскорости используются
самые простые приборы – виброметры. В более сложных приборах (виброанализаторах) также всегда присутствует режим виброметра.
Виброскорость измеряется в:
- миллиметрах на секунду [мм/сек]
- дюймов в секунду [in/s]: 1 in/s = 25,4 мм/сек
- децибелах, должен быть указан уровень 0 дБ. Если не указан, то, согласно ГОСТ 25275-82, берётся значение 5 * 10-5 мм/сек (По международному стандарту ISO 1683:2015 и ГОСТ Р ИСО 13373-2-2009 за 0 dB берётся 10-6 мм/сек)
Как перевести виброскорость в дБ ?
Для стандартного уровня 0 дБ = 5 * 10-5 мм/сек:
VdB = 20 * lg10(V) + 86
VdB – виброскорость в децибелах
lg10 – десятичный логарифм (логарифм по основанию 10)
V – виброскорость в мм/с
86 дБ – уровень 1 мм/с
Ниже приведены значечения виброскорости в дБ для стандартного ряда норм вибрации. Видно, что разница между соседними значениями – 4 дБ. Это соответствует разнице в 1,58 раза.
Видно, что разница между соседними значениями – 4 дБ. Это соответствует разнице в 1,58 раза.
| мм/с | дБ |
| 45 | 119 |
| 28 | 115 |
| 18 | 111 |
| 11,2 | 107 |
| 7,1 | 103 |
| 4,5 | 99 |
| 2,8 | 95 |
| 1,8 | 91 |
| 1,12 | 87 |
| 0,71 | 83 |
Виброперемещение
Виброперемещение (вибросмещение, смещение) показывает максимальные границы перемещения контролируемой точки в процессе вибрации. Обычно отображается размахом (двойной амплитудой, Пик-Пик, Peak to peak). Виброперемещение – это растояние между крайними точками перемещения элемента вращающегося оборудования вдоль оси измерения.
Обычно отображается размахом (двойной амплитудой, Пик-Пик, Peak to peak). Виброперемещение – это растояние между крайними точками перемещения элемента вращающегося оборудования вдоль оси измерения.
Виброперемещение измеряется в линейных единицах:
- в микрометрах [мкм]
- в миллиметрах [мм]: 1 мм = 1000 мкм
- в милсах, миллидюймах [mils]: 1000 mils = 1 дюйм, 1 mil = 25,4 мкм, 1000 mils = 25,4 мм
Видео от Сергея Бойкина
Автор: Андрей Щекалев
Не хватает информации ?
Напишите мне свой вопрос, я отвечу Вам и дополню статью полезной информацией.
Как пересчитать виброскорость в виброускорение ?
Для временного сигнала
Перевод значений вибрации из одного представления в другое и обратно производится достаточно просто, если у Вас есть временной сигнал.
Для преобразования виброскорости в виброускорение и виброперемещения в виброскорость его нужно продиффереинцировать.
Для преобразования виброускорения в виброскорость и виброскорости в виброперемещение сигнал нужно проинтегрировать.
В приборах это делается аппаратными интеграторами. В программе на компьютере это делается математическими методами.
Например, самые простые формулы:
Ai=(Vi-Vi-1)/dt
Vi=(Ai-1+4*Ai+Ai+1)*dt/6 (метод Симпсона)
dt — шаг между отсчётами сигнала
Ai — i-ый отсчёт сигнала виброускорения
Vi — i-ый отсчёт сигнала виброскорости
Нужно не забывать, что при интегрировании мы не знаем постоянную составляющую сигнала. То есть постоянное смещение (зазор) мы из виброскорости получить не сможем.
Для интегральных параметров
Если же значение «прочитано» со шкалы стрелочного прибора или с цифрового индикатора прибора, то здесь на взаимные преобразования накладываются большие ограничения. Преобразования могут быть выполнены только для тех вибросигналов, которые имеют в своем составе колебания только одной частоты f. При этом справедливы выражения:
Преобразования могут быть выполнены только для тех вибросигналов, которые имеют в своем составе колебания только одной частоты f. При этом справедливы выражения:
| V = A /(2*3.14*f)*1000 /1.4142 | V = 112,5 * A / f |
| V = S *(2*3.14*f)/1000 /2/1.4142 | V = 0,00222 * S * f |
| A = V *(2*3.14*f)/1000 *1.4142 | A = 0,00888 * V * f |
| A = S *(2*3.14*f)/1000 *(2*3.14*f)/1000 /2 | A = 0,00002 * S * f2 |
| S = V /(2*3.14*f)*1000 *1.4142*2 | S = 450 * V / f |
| S = A /(2*3.14*f)*1000 /(2*3.14*f)*1000 *2 | S = 50712 * A / f2 |
А — виброускорение, Пик (Амплитуда), м/с2
V — Виброскорость, СКЗ, мм/с
S — Виброперемещение, Пик-Пик (Размах), мкм
f — частота, Гц
3. 14 — число Пи
14 — число Пи
коэфициент 1000: перевод мкм <-> мм/с <-> м/с2
коэфициент 1.4142 — корень из 2: перевод Пик <-> СКЗ
коэфициент 2: перевод Пик <-> Размах
Пользоваться этими, на первый взгляд простыми, формулами нужно осторожно, так как на практике почти никогда не бывает чисто синусоидальных сигналов одной частоты. Реальное колебание всегда содержит в себе несколько частот.
Для спектра
Для преобразования спектра виброскорости в спектр виброускорения нужно каждую амплитуду гармоники (каждый отсчёт) спектра умножить на (2*Пи*f) и повернуть фазу на угол -90°. Также делается перевод виброперемещения в виброскорость.
Ai = Vi *(2*3.14*fi) /1000
Vi = Si *(2*3.14*fi) /1000
Для комплексного спектра используются формулы:
Rei = Imi *(2*3. 14*fi) /1000
14*fi) /1000
Imi = -Rei *(2*3.14*fi) /1000
Для обратного перевода (виброускорение->виброскорость, виброскорость->виброперемещение) нужно каждую амплитуду гармоники разделить на (2*Пи*f) и повернуть фазу на угол +90°.
Vi = Ai /(2*3.14*fi) *1000
Si = Vi /(2*3.14*fi) *1000
Для комплексного спектра используются формулы:
Rei = -Imi /(2*3.14*fi) *1000
Imi = Rei /(2*3.14*fi) *1000
Дополнительно нужно учитывать коэфициент 1000 из-за перехода мкм <-> мм/с <-> м/с2 и коэфициенты перевода Пик <-> СКЗ <-> Размах.
На графиках показаны амплитудные спектры виброускорения, виброскорости и виброперемещения одного сигнала.
Автор: Андрей Щекалев
Не хватает информации ?
Напишите мне свой вопрос, я отвечу Вам и дополню статью полезной информацией.
Лекция 11. Параметры и характеристики механических колебаний – Ассоциация EAM
Параметры вибрационного процесса
- Виброперемещение, S – это расстояние между крайними точками перемещения колеблющегося элемента вдоль оси измерения. Виброперемещение измеряется в линейных единицах: в микронах – мкм; в миллиметрах – мм, при больших значениях виброперемещения, например, грохотов (1 мм = 1000 мкм). Параметром, дополняющим виброперемещение является частота вращения. Например, допустимое значение виброперемещения 20 мкм при частоте вращения 1500 об/мин и 10 мкм при частоте вращения 3000 об/мин.
Виброперемещение измеряется при возникновении низкочастотной вибрации, верхняя граница частотного спектра не более 200 Гц. Эти измерения актуальны в строительной виброакустике, при проведении балансировки роторов, при исследовании машин с малыми зазорами между узлами и деталями, при исследовании упругих деформаций и прогнозе усталостных разрушений.
- Виброскорость, v – производная виброперемещения по времени. Этот параметр характеризует мощность колебательного (вибрационного) процесса, направленного на разрушение деталей и характеризует энергетическое воздействие на узлы объекта контроля (энергия колебания E = m × V2 / 2). Виброскорость – это скорость перемещения контролируемой точки оборудования. Виброскорость одновременно учитывает перемещение контролируемой точки и частоту колебаний, вызвавших вибрацию. Виброскорость измеряется в миллиметрах на секунду, мм/с.
Виброскорость измеряют в частотном диапазоне 10…1000 Гц. По уровню виброскорости определяют техническое состояние машин, их узлов и деталей. - Виброускорение, а – производная виброскорости по времени. Параметр характеризует силу инерции, которая воздействует на объект при вибрации:
F = m × a, где F – сила инерции; m – масса объекта; а – виброускорение.
Виброускорение – это ускорение перемещения контролируемой точки оборудования или это скорость изменения скорости. Виброускорение характеризует силовое динамическое взаимодействие элементов агрегата. Виброускорение измеряется в метрах на секунду в квадрате, м/с2, иногда используется единица ускорения свободного падания – g, 1 g = 9,8 м/с2.
Виброускорение измеряется при наличии вибрации в широкой полосе частот, от 50 до 10000 Гц и более. Эти измерения актуальны при виброакустической диагностике для оценки силы ударов и раннего обнаружения повреждений в подшипниках качения и зубчатых передачах.
Примечание: существует редко используемый параметр вибрации – резкость – третья производная перемещения по времени, размерность – км/с3. - Частота, f – характеристика периодического процесса, равная количеству повторений в единицу времени, обратно пропорциональна периоду колебаний:
f = 1/T, где Т – период, время полного цикла колебаний (с).
Единицей измерения частоты в Международной системе единиц (СИ) является герц (русское обозначение – Гц; международное – Hz), названный в честь немецкого физика Генриха Герца. Одно колебание в секунду соответствует 1 Гц.
При частоте вращения 3000 об/мин, частота колебаний составляет:
f = n / 60 = 3000 / 60 = 50 Гц.
Частота колебаний позволяет идентифицировать источник колебаний.
Гармонические колебания в разных точках машины, совпадающие по частоте, называются синхронными. Синхронные колебания отличаются друг от друга амплитудой и фазой. - Фаза колебаний, φ – определяет положение характерной точки колебаний (максимального, минимального значения или перехода от отрицательного к положительному значению) относительно зафиксированного положения метки. Измеряется в градусах. Используется при балансировке, обследовании металлоконструкций, диагностировании механизмов.
Колебания в двух точках, совпадающие по фазе, называют синфазными, а отличающиеся на 1800 – противофазными. Сдвиг фаз синхронных гармонических колебаний – это разность фаз двух синхронных гармонических колебаний гармонических колебаний в заданный момент времени. Этот параметр часто используют при анализе вибрации.

 Виброускорение характеризует силовое динамическое взаимодействие элементов агрегата. Виброускорение измеряется в метрах на секунду в квадрате, м/с2, иногда используется единица ускорения свободного падания – g, 1 g = 9,8 м/с2.
Виброускорение характеризует силовое динамическое взаимодействие элементов агрегата. Виброускорение измеряется в метрах на секунду в квадрате, м/с2, иногда используется единица ускорения свободного падания – g, 1 g = 9,8 м/с2. Одно колебание в секунду соответствует 1 Гц.
Одно колебание в секунду соответствует 1 Гц. Этот параметр часто используют при анализе вибрации.
Этот параметр часто используют при анализе вибрации.Для гармонического колебательного процесса существует ряд особенностей, которые характеризуют связь между перемещением, скоростью и ускорением:
- перемещение, скорость и ускорение – гармонические функции одной частоты;
- связь между амплитудами перемещения, скоростью и ускорением – линейная, и определяется с помощью соотношений:
v = 2 π × f× S = a × 103 / (2 π × f),
S = v / (2 π × f )= a × 103 / (2 π × f)2,
а = (2 π × f)2 × S × 10-3 = 2 π × f × v × 10-3,
формулы приведены для следующей размерности: S – мкм, v – мм/с; а – м/с2; - между фазами перемещения, скорости и ускорения существует сдвиг на 900, то есть скорость по фазе опережает перемещение на четверть периода, а ускорение опережает перемещение на полпериода – 1800 (рисунок 70).

Рисунок 70 – Сдвиг фаз между параметрами гармонических колебаний
Пример
Для роторного механизма, имеющего частоту вращения 3000 об/мин (50 Гц) зафиксировано значение виброперемещения – 20 мкм. Определить соответствующие значения виброскорости и виброускорения.
v = 2 π × f × S = 6,28 × 50 × 20 = 6,28 мм/с;
а = 2π × f × v = 6,28 × 50 × 6,28 = 1,97 м/с2.
Исходя из данных соотношений, можно сделать вывод о том, что зависимости между перемещением, скоростью, ускорением и частотой будут различными. На графике перемещения будет преобладать низкочастотная область, а на графике ускорения ‑ высокочастотная при ослаблении низкочастотной (рисунок 71).
Виброускорение | Виброскорость | Виброперемещение |
Рисунок 71 – Спектрограммы параметров вибрации, зафиксированных в одной точке
Числовые значения уровней ускорения, скорости и перемещения в логарифмических координатах (при пороговых значениях по ISO 1683) равны только в одной точке – при частоте 159 Гц (рисунок 72).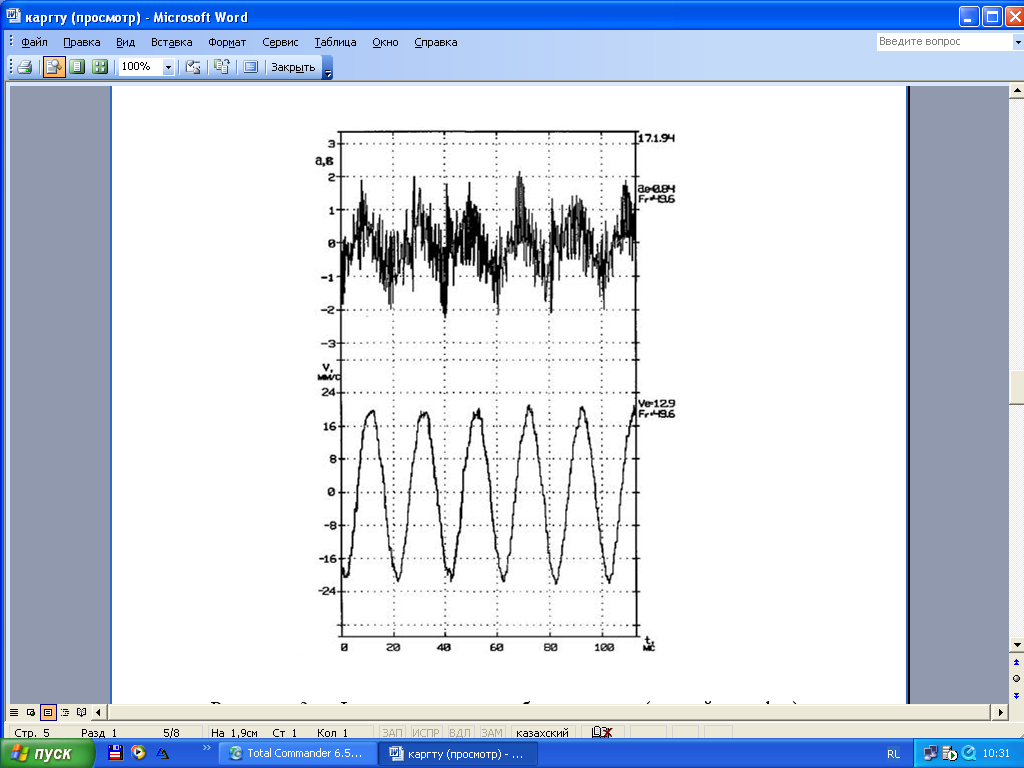 На эту частоту настраиваются калибраторы вибрации. В этой точке значение виброперемещения составляют 10 мкм, значения виброскорости – 10 мм/с, а значения виброускорения – 10 м/с2.
На эту частоту настраиваются калибраторы вибрации. В этой точке значение виброперемещения составляют 10 мкм, значения виброскорости – 10 мм/с, а значения виброускорения – 10 м/с2.
Рисунок 72 – Точка вибрационного контроля
Основные характеристики колебательных процессов
- Размах колебаний – разность между наибольшим и наименьшим значениями колеблющейся величины в рассматриваемом интервале времени (рисунок 73). Для гармонических колебаний размах колебаний равен удвоенной пиковой амплитуде, так как временная реализация в этом случае симметрична.
Размах колебаний является необходимым в тех случаях, когда смещение механических колебаний детали машины является критическим с точки зрения максимально допустимых механических напряжений и зазоров. Используется в основном при измерении виброперемещения.
Рисунок 73 – Характеристики колебательных процессов
- Пиковое значение – определяется как наибольшее отклонение колеблющейся величины от среднего положения хПИК = IхМАХI.
Используется как составляющая при измерении виброускорения. Пиковое значение эффективно при оценке кратковременных механических ударов и так далее. Однако пиковое значение отображает только максимальное значение исследуемых колебаний, а не их временное развитие. - Среднеарифметическое мгновенных значений вибрации – среднее значение измеренных данных, характеризует общую интенсивность вибрации:
где τ – текущее значение временной координаты, Т – период измерения.
Среднее значение отображает временное развитие исследуемых колебаний, но его практическое применение ограничено ввиду того, что оно не имеет непосредственной связи ни с какой физической величиной этих колебаний. - Среднее квадратичное значение (СКЗ) – квадратный корень из среднего арифметического или среднего интегрального значения квадрата колеблющейся величины в рассматриваемом периоде времени:
Для получения правильного значения, интервал усреднения должен быть не меньше одного периода колебания. Используется при измерении виброскорости. Пересчёт значений виброускорения, виброскорости и виброперемещения, определённых в результате анализа спектра, как функции угловой частоты ω, в среднее квадратическое значение виброскорости проводится по следующим формулам:
Возможно определение среднего квадратического значения виброскорости по максимальному и минимальному значению виброскорости в спектре:
Среднеквадратическое значение учитывает временное развитие исследуемых колебаний и непосредственно отображает значение, связанное с энергией сигнала и, следовательно, разрушающей способностью этих колебаний. - Коэффициент амплитуды или пик-фактор – отношение пикового (xПИК) к среднеквадратичному (xСКЗ) значению: KПФ = xПИК / xСКЗ.
Пик-фактор характеризует развитие повреждения. Значения пик-фактора в начальном периоде работы механизма составляют 3…4. При зарождении повреждений значения пик-фактора увеличиваются до 10…15. Увеличение степени повреждений снижает значения пик-фактора до 3…4 (рисунок 74).
Для гармонических колебаний: KПФ = 1,41; xПИК = А; xСРЕД = 0,637А; xСКЗ = 0,707А.
 Используется при измерении виброскорости. Пересчёт значений виброускорения, виброскорости и виброперемещения, определённых в результате анализа спектра, как функции угловой частоты ω, в среднее квадратическое значение виброскорости проводится по следующим формулам:
Используется при измерении виброскорости. Пересчёт значений виброускорения, виброскорости и виброперемещения, определённых в результате анализа спектра, как функции угловой частоты ω, в среднее квадратическое значение виброскорости проводится по следующим формулам: Увеличение степени повреждений снижает значения пик-фактора до 3…4 (рисунок 74).
Увеличение степени повреждений снижает значения пик-фактора до 3…4 (рисунок 74).Рисунок 74 – Изменения значения пик-фактора
- Эксцесс – отношение момента четвёртого порядка к квадрату момента второго порядка. Эксцесс определяет степень отклонения параметра от нормального распределения: b = m4 / (m2)2, где m4 – момент четвёртого порядка; m2 – момент второго порядка.
При определении статистических моментов используются значения:
– среднее арифметическое – сумма относительных отклонений;
– дисперсия – сумма квадратов относительных отклонений;
– асимметрия – сумма кубов относительных отклонений;
– островершинность – сумма четвёртой степени относительных отклонений.
Значения эксцесса используется для определения развития различных неисправностей элементов машин, так как отклонение от нормального распределения является однозначным признаком появления неисправности.
Относительные единицы вибрации – 20-ти кратные десятичные логарифмы отношения измеренного значения параметра вибрации (vИЗМ) к некоторому начальному уровню (vНАЧ) и измеряются в децибелах (дБ). Для виброскорости:
Lv = 20 lg (vИЗМ / vНАЧ).
Для виброускорения:
Lа = 20 lg (аИЗМ / аНАЧ).
Увеличение уровня на 6 дБ соответствует удвоению амплитуды, независимо от исходного значения. Изменение уровня на 20 дБ означает рост амплитуды в десять раз. Для временных реализаций вибрации всегда используются линейные единицы измерения амплитуды: мгновенное значение сигнала может быть и отрицательным, и поэтому его невозможно логарифмировать.
При использовании логарифмических характеристик необходимо указывать стандартный пороговый уровень, принятый при обработке значений вибрации. По Правилам Российского Морского Регистра Судоходства и ГОСТ 12.1.034-81, пороговый уровень принят: vНАЧ = 5·10-5 мм/с; аНАЧ = 3·10-4 м/с2. По ГОСТ 30296-95: vНАЧ = 5·10-8 м/с; аНАЧ = 1·10-6 м/с2. По ISO 1683: vНАЧ = 1·10-6 мм/с; аНАЧ = 1·10-6 м/с2; SНАЧ = 1·10-6 мкм.
Обычно, аналоговый вибрационный временной сигнал преобразуется в цифровой вид и используется для спектрального анализа в частотной области. Сложность формы временного сигнала, его интерпретация сильно затруднена, поэтому часто временная форма сигнала игнорируется. В то же время информацию, которую может дать временная форма, недоступна при рассмотрении спектра вибрации.
Например, случайный процесс (непрерывный шум) и переходный процесс, связанный с какими-то нерегулярными событиями, имеют схожие спектры, которые, тем не менее, соответствуют сигналам совершенной разной природы, что отчетливо видно по их временным реализациям. Во временной области легко различим стук деталей, приводящий к асимметрии формы сигнала, который может быть следствием ослабления механических соединений.
Обследование вибрационного состояния редуктора РМ-400 механизма передвижения мостового крана проведено при работе оборудования в режиме холостого хода при частоте вращения двигателя 720 об/мин. При работе редуктора наблюдаются глухие стуки. Значения общего уровня виброскорости – 3,0 мм/с, виброускорения – 1,8 м/с2. В спектрограмме виброскорости подшипника тихоходного вала редуктора (рисунок 75а) зубцовая частота второй передачи представлена составляющей на частоте 31,5 Гц, с амплитудой 0,2 мм/с. Запись временного сигнала виброускорения (рисунок 75б) позволила установить возможную причину неисправности – повреждения (забоина) на зубчатом колесе тихоходного вала проявившуюся, как удары с частотой вращения тихоходного вала. Подтверждение диагноза получено при визуальном осмотре и устранено после механической обработки повреждённого зуба.
Подтверждение диагноза получено при визуальном осмотре и устранено после механической обработки повреждённого зуба.
(а) | (б) |
Рисунок 75 – Спектрограмма виброскорости (а) и временной сигнал (б) виброускорения подшипника тихоходного вала редуктора механизма передвижения мостового крана
Цикл измерений содержал 12 измерений, с учётом 800 линий в спектре – 9600 значений, дополнительно проведены измерения временной формы вибрационного сигнала ‑ 4×16000 значений. Из этих данных получено два информационных сообщения: об общем уровне вибрации (соответствующего удовлетворительному состоянию) и о возможной причине неисправности, устранённой при ремонте.
Работа электродвигателей часто сопровождается биениями, которые, хорошо воспринимаются на слух. Эти биения соответствуют частоте скольжения ротора или разности частоты вращения ротора и частоты возбуждения двигателя. Частота биений очень низка, иногда ниже 0,1 Гц. Биения могут также возникать, когда машины, близко расположенные друг к другу, работают на слегка различающихся частотах вращения. Наблюдать биения лучше во временной области вибрационного сигнала, поскольку для вычисления спектральных составляющих на столь низких частотах требуется очень большое время и высокое разрешение.
Частота биений очень низка, иногда ниже 0,1 Гц. Биения могут также возникать, когда машины, близко расположенные друг к другу, работают на слегка различающихся частотах вращения. Наблюдать биения лучше во временной области вибрационного сигнала, поскольку для вычисления спектральных составляющих на столь низких частотах требуется очень большое время и высокое разрешение.
Трудность анализа заключается в отсутствии правил формализации и обработки временных реализаций параметров быстропротекающих процессов. Во многом данный процесс субъективен и зависит от опыта специалиста. Спектральные составляющие вибрационного сигнала часто остаются практически без изменений из-за усреднения вибрационного сигнала, необходимого для получения достоверной оценки. Анализ фактического сигнала несет дополнительную информацию о техническом состоянии механизма. Наиболее эффективно использование анализа временной формы вибрационного сигнала для диагностирования переходных, нестационарных, ударных процессов. Для этого используются периоды 30…400 мкс, количество измерений 10000…16000 и более, режим – без усреднений.
Для этого используются периоды 30…400 мкс, количество измерений 10000…16000 и более, режим – без усреднений.
Правила анализа временного сигнала
- Необходимо оценить повторяемость параметров колебательного процесса. Одинаковым воздействиям должны соответствовать одинаковые реализации параметров колебаний. Можно использовать сравнительный анализ однотипных процессов в различных точках при использовании двухканального анализатора вибрации.
- Оценка симметричности сигнала относительно нулевого (начального) уровня колебаний. Наличие симметричного сигнала свидетельствует о хорошем состоянии (идеальным случаем является синусоидальная форма колебаний – абсолютно симметричная), отклонения – увеличивают степень асимметрии. Диагностические параметры для анализа – положительные и отрицательные значения амплитуд колебаний. Причины асимметрии – нелинейность характеристик системы, анизотропия деталей подшипникового узла.
- Наиболее значимым является время успокоения системы после возмущающего воздействия. Системы с малой жесткостью и малыми демпфирующими свойствами будут иметь большее время затухания. Следует определить причины снижающие жесткость и демпфирующие свойства системы. Оценить стабильность демпфирующих свойств механической системы возможно при определении декремента колебаний как натурального логарифма отношения двух последующих амплитуд:
Характер вибрации при изменении частоты вращения механизма также является диагностическим признаком, требующим анализа временных реализаций:
- Если при изменении частоты вращения происходит увеличение вибрации в линейной зависимости, причиной повреждений являются механические повреждения деталей.
- Если при изменении частоты вращения происходит увеличение вибрации в квадратичной зависимости, причиной повреждений является дисбаланс ротора.
- Если при изменении частоты вращения происходит увеличение вибрации в экспоненциальной зависимости, причиной повреждений является трещина в корпусной детали или в основании.
- Резкое уменьшение вибрации электродвигателя при отключении питания – признак наличия повреждений, вызванных повреждениями в электрической части двигателя.
- Постепенное снижение вибрации при остановке механизма – признак наличия повреждений в механической системе.
Примеры временной реализации виброускорения подшипников электродвигателя приведены на рисунке 76.
(а) | (б) |
Рисунок 76 – Примеры временной реализации виброускорения подшипников электродвигателя
Рисунок 76а – размах колебаний около 14,0 м/с2, чётко выделяются колебания с периодом 20 мс – частотой вращения вала двигателя. Рисунок 76б – размах колебаний около 30,0 м/с2, на длинной выборке регистрируются отдельные удары до 63,0 м/с2, пропускаемые спектральным анализом в результате усреднения. Анализ временной реализации позволяет обнаружить первые признаки отклонений на более ранних стадиях, чем спектральный анализ.
Различные временные интервалы при записи сигнала позволяют изменять анализируемую картину вибрации (рисунок 77).
Рисунок 77 – Примеры временной реализации виброускорения при различных временных интервалах
Рисунок 77а – интервал 5 секунд, сигнал стабильный, размах около 10,0 м/с2. Рисунок 77б – интервал 1 секунда, различаются колебания с оборотной частотой вращения вала двигателя. Рисунок 77в – интервал 100 миллисекунд, различимы синусоидальные колебания с оборотной частотой модулированные примерно 12-й гармоникой – повреждения колец подшипника, размах модуляции около 2,6 м/с2. Рисунок 77г – подшипник компрессора интервал 100 миллисекунд, различаются колебания первой и второй зубцовой частоты, амплитуда второй зубцовой частоты значительно ниже, чем первой.
Вопросы для самостоятельного контроля
- В каких случаях измеряют виброперемещение?
- Какой показатель характеризует виброскорость?
- Зачем необходимо измерять виброускорение?
- Что характеризует частота колебаний?
- Что важнее значение сдвига фаз или его изменение?
- Каким образом связаны параметры гармонических колебаний?
- Что такое точка вибрационного контроля?
- Какие характеристики определяют колебательные процессы?
- Что такое относительные единицы вибрации?
- Зачем необходим анализ временной реализации виброускорения?
Материал предоставил Сидоров Владимир Анатольевич.
3
2
голоса
Рейтинг статьи
Измерение параметров вибрации, параметры вибрации, измерение скз виброскорости, измерение виброперемещения, измерение виброскорости, измерение виброускорения
Автор admin в . Опубликовано Pages
Любую работающую машину в первом приближении можно рассматривать как сложную колебательную систему с сосредоточенными параметрами вибрации, которые имеют сложную форму и спектральный состав. Как правило, вибросигнал содержит в себе гармонические, квазигармонические и случайные составляющие. Периодически повторяющиеся (гармонические и квазигармонические) составляющие вибрации можно представить в виде совокупности простейших гармонических колебаний разной частоты и амплитуды, и точно определять для них результирующую амплитуду, размах и другие параметры вибрации. А вот для случайной вибрации возможно определение только интегральных (усредненных) значений, по выборке за большой промежуток времени.
- Простейшие гармонические колебания
Вибрация – это механические колебания твердых тел. Простейшим видом колебаний являются гармонические колебания, которые совершают простейшие колебательные системы – маятник или масса, закрепленная на пружине (рис.1)
Рис.1 Примеры простейших колебательных систем
Рис.2 График зависимости виброперемещения от времени при гармонических колебаниях.
Гармонические колебания описываются по синусоидальному закону:
x=A*sin(ωt+φ0)
Где: x – текущая координата; A – амплитуда колебаний; ω– циклическая (угловая) частота; t– время; φ0 –начальная фаза.
Тогда мгновенная скорость v
v=ẋ=Aωcos(ωt+φ0)
И мгновенное ускорение a
a=ẋ=-Aω2sin(ωt+φ0)
Как можно видеть, параметры вибрации являются величинами взаимозависимыми, и переход между ними может быть осуществлен операциями дифференцирования или интегрирования. Физический смысл взаимосвязи параметров вибрации можно трактовать следующим образом: виброперемещение характеризует величину деформации объекта, виброскорость отражает степень усталостной прочности, а по виброускорению можно судить о величине колебательных сил, действующих на объект.
В связи с тем, что операция дифференцирования сигнала сопровождается большим уровнем шума, а интегрирование лишено этого неприятного обстоятельства, в практике мониторинга и вибродиагностики динамических машин наиболее часто используются акселерометры (датчики ускорения) в паре с интегрирующими устройствами.
- Единицы измерения параметров вибрации
При изучении вибрации динамических машин контролируют виброперемещение, виброскорость и виброускорение, при этом виброперемещение измеряют в микрометрах (мкм), виброскорость – в м/с и виброускорение – в м/с2 или в единицах «g» – ускорения свободного падения (g =9,81 м/с2).
Рис.3 Характеристики амплитуды вибрации
При этом контроль параметров вибрации возможен по следующим характеристикам амплитуды вибрации (рис.3):
- Пику – максимальной амплитуде вибрации A;
- Размаху (Пик-Пик) – сумме положительного и отрицательного пиков. Для синусоидального сигнала размах в точности равен удвоенной пиковой амплитуде, а в общем случае это не так из-за несимметрии временной реализации. К измерению размаха виброперемещения прибегают, когда критично смещение деталей друг относительно друга с точки зрения допустимых механических напряжений и зазоров;
- Средне-квадратичному значению (СКЗ), равному квадратному корню из среднего квадрата амплитуды вибрации:
Величина СКЗ характеризует энергию колебаний и используется в тех случаях, когда необходимо оценить разрушительное влияние вибрации. В случае синусоидального сигнала СКЗ=A/√2=0,707А.
- Среднему значению амплитуды, которое достаточно редко сегодня используется. Здесь же просто отметим, что среднее значение для гармонического сигнала равняется 0,637 A и соответственно меньше величины СКЗ.
В связи с тем, что диапазон изменения любого параметра вибрации может быть очень значительным (от долей до нескольких тысяч единиц измерения), значительно более удобно анализировать результаты измерений не по абсолютной шкале, а в логарифмическом масштабе – в децибелах:
Lv=20lg(V/V0)
Здесь: Lv – уровень виброскорости в дБ, V – виброскорость в м/с, V0 – опорное значение виброскорости, равное 5*10-8м/с (по российскому стандарту).
Аналогично определяются в децибелах и уровни виброускорения и виброперемещения . Все параметры вибрации в децибелах связаны между собой соотношениями:
Lv=La-20lg(f)+10
Lv=Ld+20lg(f)-60
Lv=La-20lg(f2)+70
где f – частота вибрации.
Таблица 1 Уровень в дБ и соотношение амплитуд
Как можно видеть из таблицы 1, удвоению амплитуды измеряемого параметра, независимо от его начального значения, соответствует изменение уровня в 6 дБ, и в шкале от нуля до 100 дБ можно «уложить» пики, различающиеся между собой в 100 тысяч раз. Таким образом, использование логарифмической шкалы в дБ позволяет на едином графике наглядно исследовать как составляющие вибрации с большой амплитудой, так и не терять из виду составляющие с малой амплитудой, зачастую несущие полезную диагностическую информацию.
- Измерение виброускорения, измерение виброскорости или измерение виброперемещения – что предпочтительней?
ГОСТ ИСО 10816 и другие нормативные документы по виброконтролю технического состояния вращающихся машин рекомендуют проводить измерение СКЗ виброскорости в частотном диапазоне от 10 до 1000 Гц. Данное требование становится очевидным, если мы обратимся к частотным характеристикам параметров вибрации (рис. 4):
Рис.4 Частотные характеристики виброскорости, вибросмещения (виброперемещения) и виброускорения
Как можно видеть, именно в этом частотном диапазоне виброскорость имеет наиболее равномерный характер. Но даже для решения некоторых задач виброконтроля необходимо проводить измерения в расширенном диапазоне частот. И в данном случае в области низких частот (от 0 до 300 Гц) проводят измерение виброперемещения, а в области высоких частот (более 1000 Гц) – измерения виброускорения.
Что касается вибродиагностики машин, то большинство дефектов проявляют себя возбуждением случайной высокочастотной (ВЧ) вибрации в диапазоне до 20-30 кГц, поэтому в вибродиагностике в добавление к измерению виброскорости в стандартном диапазоне частот (до 1000 Гц), проводят измерение виброускорения в расширенном частотном диапазоне (до 10-20 кГц).
- Датчики параметров вибрации (дать ссылкой на стр. со статьей «Датчики вибрации»)
В виброконтроле и вибродиагностике вращающихся машин из всех известных видов датчиков вибрации используются пьезоэлектрические и вихретоковые датчики вибрации. Напрямую измеряемой величиной пьезоэлектрического датчика является виброускорение, которое с помощью интеграторов может быть преобразовано в виброскорость и виброперемещение. Таким образом, говоря «датчик виброускорения», «датчик виброскорости» и «датчик виброперемещения», в первую очередь, понимают пьезоэлектрический акселерометр с платой интегрирования или без нее.
Пьезоэлектрические датчики вибрации относятся к датчикам контактного типа и не применимы в случаях, когда требуется бесконтактное измерение параметров вибрации. И в этом случае на помощь приходят бесконтактные вихретоковые датчики, с помощью которых в основном измеряют виброперемещение (например, при контроле осевого сдвига валов).
- Точки измерения параметров вибрации
Для получения достоверной информации о виброактивности узлов и машины в целом, а также для обнаружения, идентификации и локализации дефектов, необходим правильный выбор точек измерения параметров вибрации. Рекомендации по выбору точек измерений приводятся в ГОСТ ИСО 10816 и нормативных отраслевых документах.
Для получения более подробных теоретических и практических навыков по измерению параметров вибрации мы рекомендуем всем специалистам пройти обучение на наших лицензированных учебных курсах «Основы вибродиагностики. Правила измерения вибрации».
Немного о вибрации, виброскорости и виброускорении
Немного о вибрации, виброскорости и виброускорении
Автор: Кондратьев А.В.
Ну вот и снова, уважаемый читатель, мы возвращаемся к одному из «проклятых» вопросов нашей тематики. На сей раз не «по заказу», а в связи с новыми веяниями в нормативных документах 🙂
Итак, техническая акустики, которая, как известно, включает в себя как измерения звукового давления (в воздушной среде), так и измерения виброускорения (на поверхностях твёрдых тел).
Не будем возвращаться к тому, почему и для чего нужно это измерять. Об этом достаточно сказано как в нормативных документах, так и в самых разных публикациях.
Но вот обещанные новости.
Во-первых готовятся к утверждению единые сертификационные требования к целому ряду средств защиты информации. В том числе и к средствам защиты за счёт вибраций.
И во-вторых именно в проекте этих требований требуемые параметры для вибровозбудителей заданы не в единицах виброускорения, а в единицах вибросилы.
Соответственно, для разработчиков средств защиты такого типа и для организаций, входящих в систему сертификации (для испытательных лабораторий и органов по сертификации) встают вопросы измерения этого параметра.
С одной стороны и отечественные и зарубежные производители средств измерений в области акустики выпускают датчики вибросилы. И достаточное количество моделей. С другой стороны, а что, все измерительные акселерометры можно выбрасывать? И, кстати, если с первичным преобразователем более-менее понятно, но измерять-то чем? Все типовые шумомеры, точнее – их индикаторы, калибруются в единицах звукового давления и/или виброускорения. Шкал вибросилы в них нет. И таковые не предусмотрены действующим ГОСТ Р 53188.1-2008 (МЭК 61672-1:2002) «Шумомеры. Технические требования».
Разумеется, можно применить типовые усилители заряда. Однако и эти средства измерения показывают именно значение заряда, которое необходимо дополнительно пересчитывать в собственно вибросилу. Однако не всё так мрачно и самые обычные шумомеры могут быть применены вполне успешно, и даже не обязателен специальный датчик вибросилы, если правильно подойти к делу.
Вот этим вопросом и займёмся.
Для начала рассмотрим классическую схему измерения с датчиком вибросилы.
Эти датчики, как и акселерометры, подразделяются на «зарядовые» и со встроенной электроникой. Первые на выходе выдают заряд, пропорциональный действующей на датчик вибросиле. Вторые – напряжение, пропорциональное той же вибросиле.
Первые должны работать в паре с предусилителем со сверхвысоким входным сопротивлением (обычно от 1 до 20 Гом) и малой входной ёмкостью (порядка первого десятка пФ). Кроме того для такого типа датчика весьма существенную роль играет ёмкость соединительного кабеля (типовая не более 200-300 пФ). Чем меньше эта ёмкость, тем выше реальная чувствительность датчика (первичного преобразователя).
Вторые такой усилитель (точнее – преобразователь сопротивлений) имеют встроенный, поэтому работают в паре с предусилителями с невысоким входным сопротивлением (обычно порядка первых сотен кОм), но обладающих возможностью подачи в датчик электропитания (обычно соответствует стандарту ICP).
То есть перечисленные особенности полностью совпадают с такими же параметрами типовых акселерометров. Однако надо учитывать, что собственная ёмкость датчиков силы значительно ниже, чем собственная ёмкость зарядовых акселерометров (не менее, чем в 100 раз). Это накладывает значительно более жёсткие требования к точности определения всех ёмкостей, входящих в канал измерения (до, собственно, усилителя), поскольку влияние любой погрешности в определении этих ёмкостей при расчёте реальной чувствительности преобразователя значительно выше.
Итак, для зарядового датчика силы в качестве предусилителя совершенно спокойно можно применять типовой микрофонный предусилитель для конденсаторного микрофонного капсюля. Единственная особенность – необходимо отсечь от датчика силы поляризующее напряжение, которое формируется такими предусилителями. Это осуществляется с помощью устройства, именуемого «адаптером прямого входа» или «эквивалентом микрофона». В любом случае это коаксиальная конструкция, содержащая калиброванную последовательную ёмкость (обычно 18 пФ) и имеющая с одной стороны типовую «микрофонную» резьбу, а с другой, чаще всего, BNC разъём. Это и старенький К65 производства ГДР, и AD005 L&D и множество иных моделей, прекрасно сочетающихся с обычными микрофонными предусилителями типоразмера ½’.
Схема измерения выглядит так, как это иллюстрировано рисунком 1.
Теперь обратимся к механике. Итак, испытуемый вибровозбудитель воздействует через датчик силы на некую инертную массу. То есть, чтобы вся вибросила прикладывалась именно к измерительному первичному преобразователя необходимо, чтобы значение инертной массы было много больше, чем масса испытуемого вибровозбудителя (подразумевается именно его колеблющаяся масса, а не общая масса, включая корпус и т. д.). С точки зрения механики эта «инертная масса» должна быть (в идеале) – абсолютно твёрдым телом. Тогда и только тогда сила будет измерена правильно. Правда, величину этой массы разработчики вибровозбудителей, как правило, не сообщают в документации. Поэтому считают относительно общей массы вибровозбудителя. «много больше – это не менее, чем в 25÷30 раз. А это означает, что при массе вибровозбудителя, например, до 0,02 кг (массе, а не весе!!!!) «инертная масса» должна быть не менее 0,5 кг (а не вес!!!). А для обеспечения необходимой жёсткости это должна быть сплошная металлическая болванка (плита, цилиндр). На противоположной от точки крепления датчиков стороне можно предусмотреть поглотитель виброколебаний. Но это особый разговор, требующий отдельного рассмотрения. Кроме того, весьма рекомендуется обеспечить хотя бы простейшую виброизоляцию этой инертной массы для снижения уровня вибропомех. Те, кому приходится заниматься виброизмерениями, хорошо знают, что зачастую все наши здания просто «пропитаны» вибрацией с частотой электросети и её гармониками.
Разобравшись с чисто механическими вопросами вернёмся к, собственно, измерениям. На выходе микрофонного предусилителя мы получим некое выходное напряжение, пропорциональное сгенерирнованному первичным преобразователем заряду и, следовательно, пропорциональное приложенной вибросиле. Чтобы получить измеренную величину в требуемых единицах, то есть в ньютонах (Н) нужно ещё немного поработать.
Самый просто способ заключается в том, что шумомер при помощи отдельного, «эталонного» источника переменного напряжения калибруется как вольтметр. После чего он будет выдавать значение напряжения на выходе предусилителя в дБ относительно, например, 1 мкВ. А измеренное напряжение несложно пересчитать, через калибровочный коэффициент (учитывающий паспортную чувствительность датчика и ёмкость входных цепей), в значение вибросилы. Разумеется, вся эта процедура должна выполняться особо тщательно, поскольку все возникшие погрешности (неопределённости) переходят в погрешности итоговых результатов.
Калибровка шумомера как вольтметра вообще-то операция широко применяемая и во многом рутинная. Но уж коли мы заговорили об этом впервые, то рассмотрим её чуть подробнее.
Схема калибровки приведена на рисунке 2.
В общем-то какой из вариантов создания эталонного напряжения Вы выберете, генератор с достаточно точной установкой выходного сигнала или упрощённый генератор с достаточно точным вольтметром для контроля выходного напряжения – неважно. Важно, что именно погрешность установки этого напряжения определит основную погрешность калибровки в целом. Очень рекомендуется обеспечить погрешность не хуже ±1÷2%. Современные генераторы НЧ с программируемым выходным сигналом вполне это обеспечивают.
Устанавливают выходное напряжение генератора, например, 100 мВ, что должно в дБ относительно 1 мкВ составляет 100 дБ и калибруем шумомер на это значение. В соответствии с процедурой калибровки, изложенной в руководстве пользователя любого шумомера. После этого шумомер (вольтметр) готов к измерениям. Нелишне напомнить, что в соответствии с метрологическими нормами, такую калибровку необходимо проводить «до» и «после» основных измерений. И результаты калибровки должны совпасть с погрешностью, не более половины основной погрешности шумомера (для шумомера 1 класса 0,6 дБ, следовательно, допустимое расхождение между калибровками не должно превышать ±0,3 дБ). У меня так получалось, укладывались в ±(0,1÷0,2) дБ.
Напоминать о том, что выходное сопротивление генератора НЧ должно быть много ниже входного сопротивления микрофонного предусилителя, на мой взгляд, уже не стоит. Это и так получается, само собой. Частота калибровочного сигнала выбирается произвольно в диапазоне 100÷4000 Гц (можно и выше, и ниже, но появляются дополнительные источники погрешностей).
Далее о коэффициенте пересчёта напряжения в вибросилу.
Паспортная чувствительность зарядовых датчиков силы указывается в пК/Н. Коэффициент должен связать (перевести) напряжение в силу. Для вычисления напряжения вспомним классическую школьную формулу (электричество, 8-й класс средней школы):
Q=C*U (1)
Отсюда следует, что:
U=Q/C (2)
C зарядом понятно, это именно тот заряд, который генерирует датчик, а вот о ёмкости чуть подробнее. Эквивалентная схема входной цепи приведена на рисунке 3.
Поскольку входное сопротивление предусилителя очень высоко, то ёмкость адаптера прямого входа (18 пФ) фактически не должна учитываться, её цепь разомкнута. То же самое можно сказать о входной ёмкости предусилителя, она включается последовательно с 18-ю пФ и, практически, не влияет. Следовательно, эквивалентная ёмкость состоит из суммы ёмкостей собственно датчика, соединительного кабеля и, при его наличии, ёмкости переходника 032UNF/BNC (Сраз). В моих экспериментах это было 28,8 пФ, 216 пФ и 5 пФ, итого 249,8 пФ (249,8*10-12 Ф).
Чувствительность применённого экземпляра датчика силы типа АС-20 по паспорту составляет q=1,88 пК/Н (1,88•10-12 К/Н). Тогда с учётом (2) получаем выражение для коэффициента пересчёта выходного напряжения в значение вибросилы:
F(Н)=Q/q=(C*U)/q=(249,8*10-12 * U)/ 1,88*10-12=132,872U (3)
где U — показания вольтметра в В. Размерность данного коэффициента должна быть в Н, что неизбежно следует из выражения (3). Выражение записано в предположении того, что коэффициент передачи микрофонного предусилителя равен «1» (0 дБ). Это наиболее распространённый вариант. Если же это не так, и предусилитель ещё и усиливает сигнал, то выражение принимает вид (при условии, что Ку задан в «разах):
F(Н)= (C*( U/ Kу))/q (4)
Выражение (3) можно записать и в относительных значениях (в дБ):
F(дБ относ. 1*10-6 Н)=U+42,46869 (5)
где значение U в дБ относительно 1*10-6 В.
Рассчитав пересчётный коэффициент для конкретного датчика можно откалибровать шумомер прямо в показаниях шкалы силы в дБ относительно 1*10-6 Н. Для этого выполняем измерение (лучше несколько измерений, с разрывами во времени) одного и того же сигнала от вибровозбудителя (Внимание! Погрешность в стабильности этого сигнала полностью войдёт в погрешность калибровки и последующих измерений). Рассчитываем значения вибросилы, находим мат. ожидание этой величины. И именно на это значение перекалибровываем шумомер. Теперь он должен (только с данным первичным преобразователем!) давать прямые показания (в дБ относ. 1*10-6 Н). Правда, в отсутствии источника постоянной вибросилы проводить требуемые калибровки «до» и после» измерений будет дольше и хлопотнее.
С датчиком силы стандарта ICP всё будет почти аналогично.
Из схемы измерений исключается «адаптер прямого входа», а при калибровке шумомера как вольтметра надо не забыть подумать о том, не повредит ли напряжение ICP питания, попав на выход генератора сигнала. Удобен для этой цели наш шумомер «Тритон», в нём это питание можно просто выключить в интерфейсе управления на время калибровки.
Расчётная формула тоже претерпевает изменение, поскольку чувствительность таких датчиков силы задаётся не в единицах заряда, а в единицах напряжения на выходе датчика «на ньютон». При этом выражение (3) видоизменяется:
F(Н)=U (В)/q (В/Н) (6)
Разумеется, необходимо учитывать корректное использование десятичных приставок к единицам (мВ, мкВ, мкН и т.д.).
Всё изложенное относилось к процессу хоть и косвенного, но измерения вибросилы. Так что же можно измерять акселерометром, которых у пользователей типа «пруд пруди»?
Снова вернёмся к физике. Точнее – к механике, ещё конкретнее – к формулировке первого закона великого Ньютона 😉 Вечное, как вселенная:
F=ma (7)
Для всего «вибрационного» это действует точно так же. То есть вычислить силу, зная ускорение совсем просто. Только надо знать массу! Вот это и есть основной постулат.
Измерения акселерометром (то есть измерять ускорение) выполнять можно, но пересчитать в вибросилу – только если измерения велись на вполне определённой массе.
И ещё одно условие! Кроме инертной массы на ускорение влиять не должно НИЧЕГО! То есть эта масса должна быть закреплена (подвешена) так, чтобы в ожидаемом направлении виброколебаний им ничто не мешало, не демпфировало, не вносило затуханий, которые невозможно учесть.
Обеспечить выполнение этого условия, в общем-то, несложно. Техника за время своего развития предложила множество подобных решений. Общий принцип заключается в том, что инертная масса закрепляется в некотором держателе, который жёстко её фиксирует в одном направлении и даёт полную свободу в перпендикулярном. Именно так построены механические эквиваленты нагрузки, которые разработаны у нас и применяются для таких (и многих других!) измерений. Один из наших образцов приведён на фото 1.
Как видно на фото подвес цилиндра массой более 0,5кг (точное значение есть, но это несущественно) обеспечивает одну степень свободы – вдоль оси цилиндра, жёстко фиксируя остальные две. Форма и масса выбираются не случайным образом. Крайне желательно, чтобы отражение виброколебаний внутри массы не приводило к интерференции волн (особенно при измерениях на «тональном» сигнале), которая может существенно повлиять на результат измерений в конкретной точке. Это уже отдельный вопрос, лежащий за пределами рассматриваемой темы.
Сама масса должна быть много больше массы вибровозбудителя. На сей раз из несколько иных соображений. В частности, чтобы правильно имитировать его режим работы. На самом деле само значение массы здесь не столь критично, как в первом варианте. Будет меньше масса – увеличится виброускорение (в разумных пределах, естественно).
Проверка степени затухания вибросигнала путём сравнения значений виброускорения на одном и на втором торцах цилиндра (равно как и смещение акселерометра от оси к краям цилиндра) дают девиацию (разброс) значений, меньшую, чем основная погрешность шумомера (менее ±0,3 дБ при основной погрешности ±0,6 дБ). Таким образом, можно утверждать, что затухания виброколебаний в массе пренебрежимо малы.
Подобные конструкции могут быть выполнены не только со «струнными», но и с пружинными подвесами, различной массы, имитирующие различные механические нагрузки и позволяющие решать различные измерительные задачи.
Итак, схема измерений традиционна и приведена на рисунке 4.
Она построена для зарядового акселерометра, но точно так же выглядит для ICP модели, исключая «эквивалент микрофона» («адаптер прямого входа») и включая соответствующую модель предусилителя. И, разумеется, измерительный канал должен калиброваться «до» и «после» измерений при помощи виброкалибратора, обеспечивающего воспроизводимое с высокой точностью постоянное (обычно 10 м/с2) виброускорение.
Измерив полученное виброускорение и зная массу механической нагрузки элементарно рассчитывается соответствующее значение вибросилы, прямо по формуле (7). Таким образом, требуемые сертифицируемые параметры вибровозбудителей вполне возможно измерить уже имеющимся у большинства испытательных лабораторий набором средств измерений. Такое же косвенное измерение. С немного бóльшим количеством источников погрешностей (неопределённости измерений) – в частности при нахождение значения инертной массы.
Напомним ещё, что практически всегда мы измеряем (взвешиваем на весах) не массу, а вес, а массу нужно бы находить всё по той же формуле через ускорение свободного падения:
P=mg; сл-но m(кг)= P/g = P(м×кг/с2)/9,807(м/с2) (8)
Но это ещё не всё, вспоминаем, что все наши весы показывают (оцифрованы шкалы и/или цифровые индикаторы) вес не в ньютонах, а, традиционно, в «килограммах силы, кГ», то есть в единицах, в 9,807 раз больших («наследие» системы СГС, точнее её ответвлений). А это означает, что чтобы получить значение веса в ньютонах, показания весов ещё надо умножить на 9,807, таким образом, ускорение свободного падения у нас оказывается и в числителе, и в знаменателе выражения. И окончательный вывод – показания весов, шкала которых оцифрована в единицах «кг силы» (традиционно!), численно равны значению инерциальной массы взвешиваемого тела в «кг массы»! Всё просто, когда разберёшься 😉
Вот иллюстрация достаточно простого эксперимента. На одной и той же инертной массе выполнены измерения вибросилы датчиком силы (именно так, как описано выше), затем с теми же параметрами сигнала выполнены измерения виброускорения акселерометром. Точнее, все измерения выполнялись одновременно двумя первичными преобразователями и двумя шумомерами (по разному откалиброванными). Вибросила измерялась уже упомянутым АС-20, ускорение акселерометром PCB 532B. Шумомеры L&D тип 824 и «Тритон». Тестовый вибросигнал – синусоидальный (исключительно для упрощения измерений, можно было и на шумовом). Результаты приведены в таблице 1.
Таблица 1 – результаты измерений
|
Частота,
Гц
|
Вибросила,
Н
(АС-20), дБ
|
Виброуско-
рение,
м/с
(532В), дБ
|
Вибросила,
(АС-20),
мкН
|
Виброуско-
рение,
(532В), мкм/с2
|
Вибросила,
(532В),
мкН
|
Расхождение
(погрешность),
%
|
|
500
|
72,4
|
99,9
|
593817,132
|
98855,31
|
575337,9
|
3,16
|
|
1000
|
89,3
|
116,5
|
4155781,67
|
668343,9
|
3889762
|
6,61
|
|
2000
|
75,4
|
102,4
|
838788,994
|
131825,7
|
767225,4
|
8,91
|
|
4000
|
74,4
|
102,5
|
747571,478
|
133352,1
|
776109,5
|
-3,75
|
Приведённые данные по расхождению результатов ни в коей мере не характеризуют (в связи с явно недостаточной статистикой) погрешности того или иного метода. Но, тем не менее, даже в достаточно примитивных условиях измерений, сходимость результатов обоими методами весьма высокая (для наших задач). Что, собственно, и требовалось доказать 😉
Измерение и анализ вибрации — SPM Instrument
Анализ временного сигнала
Временной сигнал является инструментом оценки и вычисления частот соударений, происходящих в машине. Временной сигнал — это электрический сигнал, генерируемый датчиком и отражающий все механические процессы происходящие в машине. Он показывает время между соударениями и тем, сколько энергии они содержат. Анализ так же дает возможность выявить различные дефекты, возникающими с такой же периодичностью в спектре БПФ.
Параметры состояния
Параметры состояния измеряются для выбранного частотного диапазона. Они показаны в таблицах результатов измерений и в качестве диаграмм, могут быть активированы индивидуально. Возможные параметры состояния:
| VEL | СКЗ виброскорости |
| ACC | СКЗ виброускорения |
| DISP | СКЗ виброперемещения |
| CREST | Пиковое значение; разница между пиком и СКЗ |
| KURT | Куртозис; количество случайных величин в вибросигнале |
| SKEW | Перекос; ассиметрия в вибросигнале |
| NL1-4 | Уровень шумов в 4-х четвертях частотного диапазона |
Пиковые и величины размаха показаны в единице, выбранной для временного сигнала.
Спектральный анализ с симптомами
Для упрощения поиска неисправности в спектре, EVAM предоставляет готовый список симптомов дефектов. Они являются основой для выделения теоретических линий дефектов в спектре и показывают сумму линий СКЗ, как параметры симптомов дефектов (которые можно оценить и спрогнозировать). Большинство симптомов автоматически настроены, используя скорость вращения как переменную, для некоторых требуются исходные данные, например, количество лопастей на роторе. После настройки точек измерения в меню Сondmaster выбираются подходящие симптомы и группы симптомов.
Специальные коды состояния машины
Пользователь может сам задать уставки тревог по любым активным симптомам дефектов в программном обеспечении Condmaster и, таким образом, обеспечить автоматическое представление состояния оборудования в цветовом коде по системе светофора “зеленый, желтый, красный ” на основании качественной и количественной оценки неисправностей по результатам спектрального анализа вибросигнала.
Фазовое измерение
Фазой является временнАя задержка, выраженная через угол вращения. Мы высчитываем временную задержку между передачей импульса тахометра и пиком целевого частотного компонента вибрационного датчика в скорости вращения. Получившаяся величина является относительным углом, так как нет компенсации сдвига фазы в датчики или в электрических цепях.
| Главная / Контрольно измерительные приборы / Измерители шума и вибрации (шумомеры, виброметры) / Виброметр ВВМ-311 Портативный виброметр ВВМ-311 с цифровым индикатором предназначен для измерения параметров Виброметр ВВМ-311 укомплектован виброизмерительными Технические характеристики:
| ||
Все о системах измерения вибрации
1. Терминология по вибрации
Вибрация означает состояние объекта, периодически перемещающегося назад / вперед, вправо / влево или вверх / вниз, и обычно выражается посредством частоты, смещения, скорости и ускорения. Эти 4 элемента обычно обозначаются как F, D, V, A. Это проиллюстрировано просто как пружина и масса. Когда груз опускается из исходного положения и отпускается, он перемещается так же, как форма волны вибрации, показанная на графике справа.
2. Функции измерения
Это средства выражения вибрации в абсолютном значении на основе форм сигналов, измеренных в режимах, показанных выше.
- 1. PEAK (Пиковая амплитуда)
- Пиковое значение за определенный период времени.
Он используется для измерения ударов или волн, которые довольно стабильны. Рис : Пиковое значение
- 2.среднеквадратичное значение (среднеквадратичное значение)
- Среднеквадратичное значение мгновенных значений за определенный промежуток времени. Это относится к силе волны. Среднеквадратичное значение скорости является одним из важных факторов для диагностики состояния оборудования.
Рис. Среднеквадратичное значение
- 3. C ・ F (пик-фактор ・ пик-фактор)
- Отношение пиковых значений к среднеквадратичному значению
Он используется для определения износа подшипников путем относительного сравнения.
C ・ F = PEAK / rms
- 4. EQP (эквивалентное пиковое значение)
- Это синусоидальный пик, принимаемый среднеквадратичным значением.
Для синусоиды справедливо соотношение rms × √2 = PEAK. Для системы мониторинга вибрации существует случай, когда EPQ контролируется вместо пикового значения, чтобы избежать срабатывания ошибочного сигнала тревоги при любом случайном сигнале.
3.Типы вибрации
Вибрация может быть разделена на три типа на основе человеческого восприятия; «медленное движение и видимое», «невидимое, но ощутимое при прикосновении» и «неощутимое при прикосновении, но слышимое как ненормальный шум».
4. Что такое БПФ (быстрое преобразование Фурье)?
FFT — это один из методов анализа, основанный на форме волны вибрации. Как правило, формы сигналов сложны и трудны для анализа. В БПФ мы разбиваем сигналы на серию дискретных синусоидальных волн (левая диаграмма) и оцениваем каждую по отдельности.(правый график)
5. Использование спектрального анализа БПФ для анализа вибрации
Когда машина работает ненормально, например, из-за дисбаланса или повреждения подшипников, она будет производить различные вибрации, которые можно обнаружить с помощью БПФ.
6. Выбор точек замера
Некоторые моменты, которые следует учитывать при выборе позиций статуса мониторинга.
- (1) Легкость доступа
- (2) Минимальное воздействие от внешних условий
- (3) Максимальная чувствительность к ненормальным условиям
- (4) Минимальное затухание или потеря сигнала из-за неисправности
- (5) Надежность измерения
Точка измерения опорной стойки
Точка измерения встроенного подшипника
Точка измерения малогабаритного электрооборудования
Точка замера поршневого двигателя
Измерительная точка вертикального станка
Точка измерения консольного насоса
Ссылка : Диагностика мониторинга состояния оборудования ISO (категория вибрации)
выдан Ассоциацией исследования вибрации (Шиндо Гидзюту Кенкюкай)
7.Способ крепления пикапа
Неправильное присоединение датчиков может привести к разбросу данных или неточным измерениям. Обратите внимание на следующие моменты.
- 1. Установите или надежно прикрепите
- 2. Обеспечьте плотное прилегание всей монтажной поверхности
- 3. Выровняйте по вертикали или горизонтали относительно
.
ось объекта
Имейте в виду, что установка датчиков вибрации может отличаться в зависимости от диапазона измерения.
Неправильно прикрепленные датчики или акселерометры могут привести к нестабильным измерениям и неверным данным.
Обычно измерение составляет 1/3 резонансной частоты.
8. Метод измерения
Существует два типа методов измерения вибрации: «Постоянная онлайн-система мониторинга вибрации» и «Портативная автономная система мониторинга».
Любой из них обычно выбирается в зависимости от степени важности оборудования.
Машины, которые:
- — важно
- — работает постоянно
- — недоступен
- — быстро портится
Машины, которые:
- — минимальное воздействие от
поломка - — легко измерить
- — медленно портится
- — минимальное воздействие от
Смещение, скорость и ускорение — испытание на вибрацию
Назад к: Тестирование синусоиды
До сих пор мы обсуждали построение синусоидальной волны.Однако при испытании на вибрацию не менее важно движение волны.
Смещение, скорость и ускорение при испытаниях на вибрацию
Смещение, скорость и ускорение — это измерения синусоидальной волны по отношению к движению. Во время тестирования продукт подвергается входной вибрации, а выходная вибрация записывается для анализа. Движение выхода предоставляет информацию о реакции продукта на внешнюю силу и помогает определить потенциальный ущерб входного сигнала.
Рабочий объем
Инженеров-испытателей интересует не столько перемещение или изменение положения продукта, сколько ускорение во времени. Однако перед ускорением мы должны обратиться к скорости.
Скорость
Скорость — это скорость изменения позиции продукта. Скорость меняется во время испытания на вибрацию. В наивысшей точке или пике цикла продукт на мгновение находится в состоянии покоя, а скорость равна нулю. Затем продукт опускается и набирает скорость.Продукт достигает точки наибольшей отрицательной скорости, когда он пересекает положение покоя; после этого продукт начинает замедляться. В самой низкой точке или впадине цикла продукт снова на мгновение находится в состоянии покоя, и скорость равна нулю. Он снова начинает процесс, взбираясь наверх и набирая положительную скорость.
На рис. 2.1 показано изменение скорости во времени. Скорость положительна в начале, как если бы тест уже находился в движении, когда были собраны данные.В качестве меры скорости изменения положения скорость измеряется в метрах в секунду.
Рисунок 2.1. Скорость с течением времени.
Разгон
Ускорение — это скорость изменения скорости. Когда автомобиль ускоряется, его скорость увеличивается. Когда он замедляется, его скорость уменьшается. На рисунке 2.1 скорость меняется со временем. Как будет выглядеть график ускорения во времени? Рассмотрим следующее:
На пике цикла продукт имеет нулевую скорость.Затем продукт движется вниз с отрицательной скоростью. Он увеличивается с отрицательной скоростью, пока не достигнет положения покоя; в этот момент продукт начинает замедляться. В течение этого периода времени ускорение отрицательное, потому что скорость увеличивается в отрицательном направлении. Однако, пройдя положение покоя, продукт замедляется, пока не достигнет кратковременной остановки в нижней части цикла; в этот момент скорость становится положительной, и продукт движется вверх.
Другими словами, когда продукт проходит положение покоя, скорость увеличивается в положительном направлении от отрицательной до нуля и до положительной скорости.На рис. 2.2 показано ускорение продукта во времени.
Рисунок 2.2. Ускорение со временем.
Ускорение, являющееся мерой скорости изменения скорости, измеряется в метрах в секунду в секунду. Мы можем представить это как изменение скорости в метрах в секунду каждую секунду. При испытании на вибрацию ускорение измеряется в единицах g или G, где 1 G эквивалентно ускорению свободного падения (около 9,8 метра в секунду в секунду).
Диапазон частот при проверке синуса
До сих пор мы обсуждали случаи, возникающие во время теста однотонального синусоидального сигнала с низкими частотами.В действительности испытание на синусоидальную вибрацию проводится в широком диапазоне частот, от 10 до 10 000 Гц. Когда мы встряхиваем продукт с помощью синусоидального тона 5000 Гц, продукт подвергается 5000 циклам каждую секунду.
Ниже приведено замедленное видео, показывающее смещение и скорость вибрирующей головки с частотой 5 Гц. Когда смещение находится в максимальной или минимальной точке, скорость шейкерной головки равна нулю.
Измерение вибрации: полное руководство
СОДЕРЖАНИЕ
- Что такое вибрация?
- Откуда возникает вибрация?
- Количественное определение уровня вибрации
- Параметры вибрации: ускорение, скорость и смещение
ПОЛУЧИТЕ ПОЛНОЕ РУКОВОДСТВО
ИЗМЕРЕНИЕ ВИБРАЦИИ
BRÜEL & KJR
СКАЧАТЬ
Говорят, что тело вибрирует, когда оно описывает колебательное движение относительно исходного положения.Количество раз, когда полный цикл движения происходит в течение секунды, называется частотой и измеряется в герцах (Гц).
Движение может состоять из одного компонента, происходящего с одной частотой, как в случае камертона, или из нескольких компонентов, возникающих одновременно с разными частотами, например, с движением поршня двигателя внутреннего сгорания.
На практике вибрационные сигналы обычно состоят из очень многих частот, возникающих одновременно, поэтому мы не можем сразу увидеть, просто взглянув на амплитудно-временную диаграмму, сколько компонентов и на каких частотах они возникают.
Эти компоненты можно выявить, построив график зависимости амплитуды вибрации от частоты. Разбивка сигналов вибрации на отдельные частотные составляющие называется частотным анализом, метод, который можно считать краеугольным камнем диагностических измерений вибрации. График, показывающий уровень вибрации как функцию частоты, называется частотной спектрограммой.
При частотном анализе вибрации машины мы обычно находим несколько заметных периодических частотных составляющих, которые напрямую связаны с основными движениями различных частей машины.Таким образом, с помощью частотного анализа мы можем отследить источник нежелательной вибрации.
На практике очень сложно избежать вибрации. Обычно это происходит из-за динамических эффектов производственных допусков, зазоров, контакта качения и трения между деталями машины и дисбаланса сил во вращающихся и совершающих возвратно-поступательное движение элементах. Часто небольшие незначительные колебания могут возбуждать резонансные частоты некоторых других частей конструкции и усиливаться до основных источников вибрации и шума.
ПОДРОБНЕЕ
ИЗМЕРЕНИЕ ВИБРАЦИИ
Но иногда механическая вибрация помогает. Например, мы намеренно создаем вибрацию в питателях компонентов, уплотнителях бетона, ваннах для ультразвуковой очистки, перфораторах и сваях. Машины для испытания на вибрацию широко используются для передачи контролируемого уровня энергии вибрации изделиям и узлам, где требуется изучить их физическую или функциональную реакцию и убедиться в их устойчивости к вибрационным средам.
Основным требованием во всех вибрационных работах, будь то при проектировании машин, использующих ее энергию, или при создании и обслуживании плавно работающих механических изделий, является способность получить точное описание вибрации путем измерения и анализа.
Амплитуда вибрации, которая является характеристикой, описывающей интенсивность вибрации, может быть определена количественно несколькими способами. На диаграмме показана взаимосвязь между размахом сигнала, максимальным уровнем, средним уровнем и среднеквадратичным уровнем синусоиды.
Значение размаха важно тем, что оно указывает на максимальное отклонение волны, полезную величину, когда, например, вибрационное смещение детали машины является критическим с точки зрения максимального напряжения или механического зазора.
Пиковое значение особенно ценно для указания уровня кратковременных шоков и т. Д. Но, как видно из рисунка, пиковые значения указывают только на то, какой максимальный уровень произошел, временная история волны не учитывается.
С другой стороны, выпрямленное среднее значение учитывает временную историю волны, но считается имеющим ограниченный практический интерес, поскольку не имеет прямого отношения к какой-либо полезной физической величине.
Среднеквадратичное значение является наиболее подходящей мерой амплитуды, потому что оно учитывает временную историю волны и дает значение амплитуды, которое напрямую связано с содержанием энергии и, следовательно, разрушительной способностью вибрации.
Единицы измерения
Когда мы смотрели на вибрирующий камертон, мы рассматривали амплитуду волны как физическое смещение концов вилки в обе стороны от положения покоя. Помимо смещения, мы также можем описать движение ножки вилки с точки зрения ее скорости и ускорения. Форма и период вибрации остаются неизменными независимо от того, рассматривается ли это смещение, скорость или ускорение. Основное отличие состоит в том, что между кривыми амплитуды и времени трех параметров, как показано на чертеже, существует разность фаз.
Для синусоидальных сигналов амплитуды смещения, скорости и ускорения математически связаны функцией частоты и времени, это показано графически на диаграмме. Если пренебречь фазой, как это всегда бывает при проведении измерений среднего времени, то уровень скорости можно получить, разделив сигнал ускорения на коэффициент, пропорциональный частоте, а смещение можно получить, разделив сигнал ускорения на коэффициент пропорционален квадрату частоты.Это деление выполняется в цифровом виде в измерительных приборах.
Параметры вибрации почти всегда измеряются в метрических единицах в соответствии с требованиями ISO, они показаны в таблице. Тем не менее, гравитационная постоянная «g» или, возможно, более правильно «g n » все еще широко используется для уровней ускорения, хотя и находится за пределами системы когерентных единиц ISO. К счастью, коэффициент почти 10 (9,80665) связывает две единицы [MOP1], так что мысленное преобразование в пределах 2% — это просто.
Выбор параметров ускорения, скорости или смещения
Обнаруживая виброускорение, мы не привязаны только к этому параметру. Мы можем преобразовать сигнал ускорения в скорость и смещение. Большинство современных виброметров оборудованы для измерения всех трех параметров.
Если выполняется одно измерение вибрации в широком диапазоне частот, выбор параметра важен, если сигнал имеет компоненты на многих частотах. Измерение смещения придает наибольший вес низкочастотным компонентам, и, наоборот, измерения ускорения будут взвешивать уровень по отношению к высокочастотным компонентам.
Опыт показал, что общее среднеквадратичное значение скорости вибрации, измеренное в диапазоне от 10 до 1000 Гц, дает наилучшее представление о степени вибрации вращающихся машин. Вероятное объяснение состоит в том, что данный уровень скорости соответствует данному уровню энергии; вибрация на низких и высоких частотах одинаково взвешена с точки зрения энергии вибрации. На практике многие машины имеют достаточно плоский спектр скоростей.
При выполнении узкополосного частотного анализа выбор параметра будет отражаться только в том, как анализ будет наклонен на дисплее или распечатан (как показано на средней диаграмме на противоположной странице).Это приводит нас к практическим соображениям, которые могут повлиять на выбор параметра. Предпочтительно выбирать параметр, который дает наиболее ровный частотный спектр, чтобы наилучшим образом использовать динамический диапазон (разницу между наименьшим и наибольшим значениями, которые могут быть измерены) прибора. По этой причине параметр скорости или ускорения обычно выбирается для целей частотного анализа.
Поскольку измерения ускорения взвешиваются по отношению к высокочастотным компонентам вибрации, эти параметры, как правило, используются там, где интересующий частотный диапазон охватывает высокие частоты.
Природа механических систем такова, что заметные смещения происходят только на низких частотах; поэтому измерения смещения имеют ограниченную ценность в общем исследовании механической вибрации. Там, где рассматриваются небольшие зазоры между элементами машины, важно учитывать вибрационное смещение. Смещение часто используется как индикатор дисбаланса вращающихся частей машины, потому что относительно большие смещения обычно происходят на частоте вращения вала, которая также представляет наибольший интерес для целей балансировки.
Для использования вышеуказанного калькулятора:
Существует математическая зависимость между частотой, смещением, скоростью и ускорением для синусоидального движения при рассмотрении их пиковых значений.Связь такова, что, если известны какие-либо две из четырех переменных, две другие можно вычислить. Приведенные ниже уравнения представляют все требуемые комбинации. Уравнения для синусоидального движения G в этих формулах — это , а не ускорение свободного падения. Это константа для расчета в разных системах. Для метрической системы G составляет 9,80665 м / с². Для Imperial G равно 386.0885827 дюйм / с² Для SI, G составляет 1 м / с² Поскольку движение является синусоидальным, смещение, скорость и ускорение изменяются синусоидально. Однако они не совпадают. Фазовое соотношение между смещением, скоростью и ускорением таково, что скорость на 90 ° не совпадает по фазе с ускорением, а смещение на 180 ° не совпадает по фазе с ускорением. Другими словами, когда смещение максимальное, скорость минимальная, а ускорение максимальное. Синусоидальное движение, 20 Гц Еще одно применение этого калькулятора — определение максимальной частотной характеристики для датчиков положения SpaceAge Control.Для этого обратитесь к таблицам данных, расположенным в нашей (Литературной комнате), и отметьте максимальное ускорение для данной модели. Затем используйте этот калькулятор для определения максимальной частоты модели для данного смещения и связанной информации. Уравнения, графики и информация любезно предоставлены Ричардом Бейкером, который выпускает VIBKIT, комплексный набор инструментов для испытаний на вибрацию, для которого доступна демонстрационная версия. Примечание: 1 gn = 9,80665 м / с² = 32,174 фут / с² = 386,0886 дюймов / с². Другие калькуляторы: Отсутствие гарантий: этот калькулятор и информация предоставляются «как есть», без каких-либо гарантий, условий или заявлений любого рода, явных или подразумеваемых, включая, помимо прочего, любые гарантии ненарушения прав и подразумеваемые гарантии условий. товарной пригодности и пригодности для определенной цели.Ни при каких обстоятельствах SpaceAge Control, Inc. не несет ответственности за любые прямые, косвенные, особые, случайные, косвенные или другие убытки, независимо от того, возникли ли они по контракту, правонарушению или иным образом, возникшие в результате или в связи с использованием или выполнением информация, содержащаяся на этой веб-странице. |
Измерение вибрации; Датчики вибрации; Точное измерение вибрации
Общие указания по применению LA05-0020
Авторские права © Lion Precision, 2013 г.www.lionprecision.com
Резюме:
Вибрация — это сложное измерение, содержащее множество различных параметров. Различные технологии измерения имеют преимущества и недостатки в зависимости от конечных целей измерения вибрации. В данном примечании к применению рассматриваются все эти области.
Измерение вибрации
Вибрация — это временное (периодическое / циклическое) смещение объекта вокруг центрального статического положения.Следующие факторы имеют сложную взаимосвязь с величиной и скоростью вибрации:
- Собственные частоты и жесткость объекта
- Амплитуда и частота любого внешнего источника (ов) энергии, вызывающего вибрацию
- Механизм связи между источником энергии вибрации и интересующим объектом.
Измерение вибрации сложно из-за множества компонентов — смещения, скорости, ускорения и частоты.Кроме того, каждый из этих компонентов можно измерить по-разному — размах, пик, среднее значение, среднеквадратичное значение; каждый из которых может быть измерен во временной области (в реальном времени, мгновенные измерения с помощью осциллографа или системы сбора данных) или в частотной области (величина вибрации на разных частотах в частотном спектре) или просто одним числом для «общей вибрации». ”
Просмотр вибрации во временной области позволяет выявить мгновенное местоположение вибрирующей поверхности в различные моменты времени. | Просмотр вибрации в частотной области показывает величину вибрации на разных частотах. | «Общая вибрация» может отображаться с помощью функции TIR на модуле счетчика MM190. |
Измерение вибрации иногда используется как косвенное измерение некоторого другого значения. Конечная цель измерения определяет подход к для измерения вибрации . Часто мониторинг состояния — прогнозирование или мониторинг износа, усталости и отказов — требует измерений вибрации, предназначенных для определения кинетической энергии и сил, действующих на объект.Это часто называют инерционной вибрацией. Примером может служить мониторинг двигателей машин (особенно подшипников) в критических областях. В этих случаях измерение ускорения обеспечивает простой перевод в единицы силы, если масса объекта известна.
Другие приложения связаны со смещением интересующего объекта, поскольку непреднамеренные смещения ухудшают производительность системы. Жесткие диски и станки являются примерами этого типа измерения вибрации, иногда называемого позиционной вибрацией или относительной вибрацией .
Измерение импульсной и непрерывной вибрации
Еще два сценария вибрации — это непрерывные и импульсные измерения вибрации. Непрерывные измерения вибрации используются для мониторинга состояния и эксплуатационных испытаний. Он непосредственно измеряет, что происходит с интересующим объектом в реальных условиях эксплуатации.
Измерение импульсной вибрации включает удары по объекту, часто с помощью «откалиброванного молотка», который измеряет силу удара, а затем измерение результирующей вибрации объекта.Этот тип теста выявляет резонансы внутри объекта, что помогает предсказать его поведение в рабочих условиях. Это часто приводит к конструктивным соображениям, чтобы либо избежать, либо подчеркнуть резонансные частоты в зависимости от приложения.
Оборудование для измерения вибрации и технология датчиков вибрации
Вибрация измеряется как ускорение, скорость или смещение. У каждого есть свои преимущества и недостатки, и каждая единица измерения вибрации может быть преобразована в другую, хотя это может иметь потенциально неблагоприятные последствия.Ускорение и смещение — наиболее распространенные методы измерения вибрации.
Измерение вибрации акселерометрами
Акселерометры
— это небольшие устройства, которые устанавливаются непосредственно на поверхности (или внутри) вибрирующего объекта. Они содержат небольшую массу, которая подвешена на гибких частях, действующих как пружины. Когда акселерометр перемещается, небольшая масса отклоняется пропорционально скорости ускорения. Для измерения отклонения массы могут использоваться различные методы измерения.Поскольку масса и силы пружины известны, величина отклонения легко преобразуется в значение ускорения. Акселерометры могут предоставлять информацию об ускорении по одной или нескольким осям.
Измерения инерционной вибрации, в которых силы, действующие на объект, являются критическим фактором, хорошо подходят для акселерометров, но акселерометры чувствительны к частоте. Вибрации на более высоких частотах имеют большее ускорение, чем колебания на более низких частотах. По этой причине акселерометры выдают очень низкий уровень сигнала низкочастотной вибрации и могут иметь плохое отношение сигнал / шум.Кроме того, использование интегрирования для получения скорости или двойного интегрирования для получения значений смещения уменьшает высокочастотные сигналы.
Прикрепление акселерометров к интересующему объекту изменяет массу объекта, что приводит к изменению его собственных резонансных частот. Когда масса объекта значительно превышает массу акселерометра, как это часто бывает, эффект незначителен. Но это ограничивает использование акселерометров на небольших объектах.
Акселерометры
— отличный выбор для больших объектов, вибрирующих с более высокими частотами, в которых необходимо измерять инерционные силы, действующие на объект.
Измерение вибрации с помощью бесконтактных датчиков перемещения
Датчики перемещения емкостные бесконтактные
Бесконтактные датчики перемещения устанавливаются с небольшим зазором между датчиком (зондом) и поверхностью вибрирующего объекта. Емкостные и вихретоковые датчики смещения — лучший выбор для высокоскоростных измерений с высоким разрешением. Поскольку их выходные данные представляют собой измерения смещения, они идеально подходят для измерений относительной вибрации (позиционной вибрации).Эти измерения выполняются, когда физическое местоположение поверхности вибрирующего объекта в любой момент времени является критическим фактором.
Обладая частотной характеристикой от 10 кГц до 80 кГц и разрешением до нанометров, эти датчики показывают точное мгновенное местоположение объекта, даже когда он движется с высокой скоростью.
Вихретоковые бесконтактные датчики перемещения
Поскольку датчики не установлены на объекте, они не изменяют массу объекта или его резонансные характеристики.Эти датчики имеют плоскую частотную характеристику от постоянного тока до почти их номинальной частотной характеристики. Поскольку на выходной сигнал не влияет частота вибрации, измерения более точны по всему спектру частот.
Данные о перемещении от этих датчиков можно дифференцировать для получения информации о скорости и дифференцировать во второй раз для получения информации об ускорении. Процесс дифференцирования ограничит низкочастотные сигналы и подчеркнет более высокочастотные сигналы. Это приведет к снижению отношения сигнал / шум на высоких частотах.
Мгновенная и полная вибрация
«Общая вибрация» может быть измерена с помощью захвата сигнала вибрации TIR (размах).
Датчики перемещения выдают выходные данные, которые можно наблюдать в реальном времени на осциллографе или с помощью системы сбора данных. Эти мгновенные данные в реальном времени предоставляют точные данные о вибрации, которые можно использовать для определения производительности машины в зависимости от времени или углового положения вращающейся части.
В других приложениях требуется простое число «общей вибрации».Чтобы получить такое число, необходимо будет обработать выходной сигнал датчика. Если вы используете емкостные датчики перемещения серии Elite, модуль обработки сигналов и измерителя MM190 может выполнять измерение общей вибрации. Функции захвата пиков включают опцию TIR (Total Indicator Reading), которая отображает разницу между наиболее отрицательными и наиболее положительными измерениями. Кнопка «Сброс» очищает эти записанные значения, чтобы можно было записать новые значения. Это единичное измерение размаха (размаха) является показателем общей вибрации.
Изменение «общей вибрации» можно измерить с помощью опции Tracking TIR модуля MM190.
Если ожидается, что значение вибрации изменится со временем, например, во время регулировки механической системы, можно использовать опцию «Отслеживание МДП». Отслеживание TIR отображает значение размаха, но пиковым значениям позволяют медленно уменьшаться до нуля. Таким образом, индикатор показывает текущее значение TIR через несколько секунд, даже если значение уменьшилось. Эта функция облегчает экспериментирование с окружающей средой объекта, чтобы определить, что может уменьшить общую вибрацию без необходимости ручного сброса пиковых значений.
Крепление зонда датчика перемещения
При измерении вибрации датчики перемещения, вероятно, также будут подвергаться вибрации. Чтобы свести к минимуму влияние вибрации на сами датчики, они должны быть жестко закреплены. Зонды с резьбовыми корпусами, закрепленными в жесткой опоре, должны обеспечивать жесткость, необходимую для минимизации вибрационных эффектов.
Установка с помощью установочного винта фиксирует зонд вдоль оси зонда, но по-прежнему может происходить перемещение по двум другим осям, особенно на микро и нано уровнях. | Зажимное крепление более стабильное, чем крепление с помощью установочного винта. Но на микро- и наноуровне ошибки формы могут привести только к двухточечному зажиму, очень похожему на крепление с установочным винтом. | Крепление с трехточечным зажимом по своей природе стабильно и не подвержено небольшим погрешностям формы в округлости. |
Гладкие цилиндрические зонды, закрепленные на зажимах, требуют тщательного рассмотрения, поскольку они более подвержены воздействию вибрации.Существуют различные способы крепления пробников цилиндрического типа с помощью зажимов; одни лучше других. При измерениях с высоким разрешением конструкция крепления начинает играть важную роль в качестве измерения.
Обычный метод монтажа — это сквозное отверстие с установочным винтом для фиксации датчика. Для измерений в стабильной, не вибрирующей среде, не измеряющей на субмикронных уровнях, этого метода часто бывает достаточно. Но эта система фиксирует датчик только в двух точках (установочный винт и точка, противоположная установочному винту), что дает ему некоторую свободу движения по крайней мере по одной оси.Для измерений с высоким разрешением в условиях вибрации требуется лучшая система.
Крепление «зажимной зажим», в котором сквозное отверстие затягивается на цилиндрическом зонде, является лучшим решением. Зажим по всей окружности охватывает большую часть поверхности зонда и обеспечивает более устойчивое крепление. Однако любая овальность зонда или сквозного отверстия может начать действовать как двухточечный зажим установочного винта.
В наиболее стабильном методе зажима используется зажим, который зажимает датчик в трех или четырех точках, а не по всей окружности.Этот метод остается стабильным, несмотря на погрешности округлости корпуса зонда или сквозного отверстия зажима.
Дополнительные рекомендации по установке емкостного датчика перемещения
Емкостные датчики перемещения имеют размер пятна измерения около 130% диаметра чувствительной области зонда. Если целевая область измерения меньше указанного, это будет подвержено ошибкам и может потребовать специальной калибровки.
Несколько емкостных пробников
Когда несколько емкостных пробников используются с одной и той же целью, их приводная электроника должна быть синхронизирована.В многоканальных емкостных сенсорных системах Lion Precision (серия Elite и CPL230) используется синхронизированная электроника. Емкостные датчики не требуют минимального расстояния между соседними датчиками.
Условия окружающей среды для емкостных датчиков
Для емкостных датчиков требуется чистая и сухая среда. Любое изменение материала между зондом и мишенью повлияет на измерение.
Все датчики обладают некоторой чувствительностью к температуре, но системы емкостных датчиков Lion Precision компенсируют изменения температуры между 20 ° C и 35 ° C с отклонением менее 0.04% полной шкалы / ° C.
Обычные изменения влажности не влияют на измерения емкостного смещения. Влажность в диапазоне 90% может начать влиять на измерения; любая конденсация в области измерения сделает измерение недействительным.
Дополнительные рекомендации по установке датчика вихретокового смещения
Вихретоковые датчики смещения
используют магнитное поле, которое охватывает конец зонда. В результате «размер пятна» датчиков вихретокового смещения составляет около 300% диаметра зонда.Это означает, что любые металлические предметы в пределах трех диаметров зонда от зонда будут влиять на выходной сигнал сенсора.
Это магнитное поле также распространяется вдоль оси зонда к задней части зонда. По этой причине расстояние между чувствительной поверхностью зонда и системой крепления должно быть как минимум в 1,5 раза больше диаметра зонда. Датчики вихретокового смещения нельзя монтировать заподлицо с монтажной поверхностью, если вокруг зонда нет правильно спроектированного расточенного отверстия.
При установке вихретокового зонда должно оставаться свободное от металла пространство вокруг наконечника как минимум в три раза больше диаметра зонда.Для утопленного монтажа требуется зенковка.
Если мешающие объекты рядом с датчиком неизбежны, необходимо выполнить специальную калибровку, в идеале — с датчиком в приспособлении.
Несколько вихретоковых пробников
Когда несколько зондов используются с одной и той же целью, они должны быть разделены минимум тремя диаметрами зонда, чтобы предотвратить взаимное влияние каналов. Если это неизбежно, возможна специальная заводская калибровка, чтобы свести к минимуму помехи.
Требования к окружающей среде для вихретоковых датчиков
Измерение линейных перемещений с помощью вихретоковых датчиков невосприимчиво к инородным материалам в зоне измерения. Большим преимуществом вихретоковых бесконтактных датчиков является то, что их можно использовать в довольно агрессивных средах. Все непроводящие материалы невидимы для вихретоковых датчиков. Даже металлические материалы, такие как стружка в процессе обработки, слишком малы, чтобы существенно взаимодействовать с датчиками.
Вихретоковые датчики
обладают некоторой чувствительностью к температуре, но система компенсирует изменения температуры между 15 ° C и 65 ° C с отклонением менее 0,01% от полной шкалы / ° C.
Изменения влажности не влияют на измерения вихретокового смещения.
Узнайте о вибрации, Том 1: Основные сведения о вибрации оборудования
Это статья, посвященная анализу вибрации, теории мониторинга, применению и преимуществам, которые она предлагает инженерам, операторам, менеджерам и техническим специалистам по техническому обслуживанию и ремонту электростанций.
Общая терминология, используемая для определения вибрации оборудования
СКОРОСТЬ = Скорость вибрации измеряется в пиковых единицах, таких как дюймы в секунду (ips) или миллиметры в секунду (мм / с). Другой способ взглянуть на скорость — это расстояние за время или то, сколько машина движется каждую секунду в трех важных направлениях во всех основных точках опоры (ОСИ, ВЕРТИКАЛЬНО, ГОРИЗОНТАЛЬНО). Измерение скорости и мониторинг вибрации — это наиболее распространенная единица для выявления различных проблем или приемлемости, таких как: дисбаланс, несоосность, неплотность (конструкция машины, фундамент или подшипники), гармоники и многие другие проблемы в частотном диапазоне оборудования и многих кратных фактическая скорость.
Измерения скорости (при использовании одноосевого датчика / зонда и ручного измерителя) регистрируются в трех направлениях: осевом, горизонтальном и вертикальном на всех блоках коренных подшипников или концевых раструбах корпуса двигателя. См. Рисунки.
Скорость вибрации удобна тем, что она не связана со скоростью. Современные компьютеры с трехосными датчиками могут выполнять измерения во всех трех плоскостях из одного места.
Общая или широкополосная вибрация с использованием скорости применима ко всем типам обычного вращающегося оборудования (ISO / ANSI), работающего при полной нагрузке или скорости.(Исключения = дизельные двигатели и камнедробилки.)
УЛЬТРАУРОВНИ = 0,05 дюйма в секунду / 1,3 мм / с или менее при любой скорости. Никаких действий не требуется.
ОТЛИЧНЫЙ УРОВЕНЬ = 0,1 дюйма в секунду / 2,5 мм / с или менее при любой скорости. Никаких действий не требуется.
ХОРОШИЕ УРОВНИ = 0,2 дюйма в секунду / 5,0 мм / с или менее при любой скорости. Никаких действий не требуется.
СПРАВЕДЛИВЫЙ УРОВЕНЬ = 0,3 дюйма в секунду / 7,5 мм / с или менее при любой скорости. Никаких действий не требуется, если в спецификациях производителя не указано иное и / или не было проблем на конкретной машине (многочисленные ремонты).Скорость .3 дюйма в секунду / 7,5 мм / с обычно является максимальным уровнем допуска ГРАНИЦЫ в любом направлении: радиальном, тангенциальном или осевом. Во многих случаях попытка снизить скорость вибрации ниже 0,3 дюйма / 7,5 мм / с во всех направлениях датчика может оказаться слишком дорогостоящей или непрактичной из-за множества проблем, связанных с: слабыми сторонами конструкции или опорной базы, турбулентностью системы, сильным натяжением. Чувствительность, плохая изоляция или изоляция заземления, плохие / неправильные / изношенные приводы, дальнейшая трудность балансировки, очень горячие приложения, деформированные детали и т. Д.пр.
УРОВНИ ШЕРОХОВАТОСТИ = 0,4 дюйма в секунду / 10 мм / с или выше при любой скорости. (Примите меры в ближайшее время.)
ОЧЕНЬ ШИРОКИЙ УРОВЕНЬ = .6 дюймов в секунду / 15 мм / с или выше при любой скорости. (Примите меры.)
УРОВНИ ОПАСНОСТИ = 0,8 дюйма в секунду / 20 мм / с или выше при любой скорости. (Выключение и исправление.)
Взаимосвязь вышеуказанных уровней скорости вибрации находится на Графике интенсивности вибрации. Важно понимать, что вибрация может быть плавной в одном или нескольких направлениях, но очень грубой в другом, поэтому записывайте скорость в трех направлениях в каждом месте подшипника и предпочтительно в течение нескольких часов после запуска.
УСКОРЕНИЕ = Данные об ускорении очень важны для обнаружения неисправностей в подшипниках, зацеплении шестерен или электрических проблем. Ускорение измеряется в единицах G. Упрощенное = дюймы в секунду / секунду (ips / s) или миллиметры в секунду / секунду (мм / s / s). Ускорение очень важно для данных о неисправностях подшипников и шестерен в высокочастотном диапазоне. Ускорение — это также внезапное изменение скорости. Данные об ускорении актуальны только для оси вращения.Некоторые измерители вибрации имеют выход на наушники, чтобы аналитик мог слышать шум внутри подшипников во время записи G. Прослушивание подшипников с помощью наушников, таких как электронный стетоскоп, очень полезно для выявления дефектов. Ультразвуковые анализаторы также могут использоваться для различных тестов.
Типичные данные об ускорении для всех типов подшипников в общем вращающемся оборудовании. (Исключения = дизельные двигатели и камнедробилки.)
ОТЛИЧНЫЕ УРОВНИ = Обычно.10 G или меньше. Никаких действий не требуется.
ХОРОШИЙ УРОВЕНЬ = Обычно 0,35 G или меньше. Никаких действий не требуется, если только не шумно.
СПРАВЕДЛИВЫЙ УРОВЕНЬ = Обычно 0,50 G или меньше. Никаких действий не требуется, если только не шумно.
(Если у вас нет записей, рассмотрите анализ спектра вибрации для всех уровней ниже.)
Грубый уровень = обычно 0,75 G или более. Возможные действия требуются, если шумно. Также проверьте температуру подшипников.
ОЧЕНЬ ШИРОКИЙ УРОВЕНЬ = Обычно 1.0 G или более. Требуется дальнейший анализ. Также проверьте шум и температуру подшипников.
УРОВНИ ОПАСНОСТИ = Обычно 1,5 G или более. Вероятно, проблема. Дальнейший анализ и проверка шума и температуры подшипников.
ПРОБИВНЫЕ УРОВНИ = Обычно 2,5 G или более. Выключите и исправьте сейчас! Опасный!
Примечание: Фактическое G = 32 фута / сек / сек. = 9,8 м / с / с. Вибрационное оборудование преобразует эти значения.
Как уже упоминалось, если необычный шум присутствует на слух или при использовании электронного стетоскопа, уровни ускорения G являются второстепенными.Это означает, что может быть раннее предупреждение о неисправности подшипника на уровне 0,1 G. Выключите машину и внимательно слушайте все подшипники во время выбега. Если подшипники двигателя зашумлены, повторите этот тест со снятыми ремнями или отсоединенной муфтой. Запустите двигатель на полную скорость, затем выключите и прислушайтесь. Когда двигатель заблокирован, а привод (ремни или муфта отсоединены), проверьте вал ротора на ослабление, приложив давление в вертикальном или осевом направлениях, чтобы оценить чрезмерный люфт. Проверните вал вручную на несколько оборотов и внимательно прислушайтесь к необычным шумам в подшипниках.
СМЕЩЕНИЕ = Смещение измеряется в миллиметрах (1 мил = 0,001 дюйма) или мм (1 мм = 0,0025 дюйма). Измерения смещения записываются в тех же трех направлениях, что и скорость: осевое, горизонтальное и вертикальное. Смещение не используется и не рекомендуется для записи или мониторинга, поскольку серьезность или приемлемость зависит от скорости. Смещение также используется для выявления проблем в нижних частотных диапазонах. Смещение можно использовать для измерения исходных значений = стены, полы, балки, опоры, рамы = очень медленно движущиеся или неподвижные объекты.Конический алюминиевый зонд можно использовать для измерения осевых перемещений вала. Штанга для вала Fish Tail ™ может использоваться для измерения изгибов или перекосов при работающей машине.
Например, 1 мил при 1800 об / мин = отлично. Но 1 мил при 30 000 об / мин опасен. Обычно допуски динамической балансировки ротора часто указываются в смещении (мил), потому что это было промышленным стандартом в течение 60 лет или более. Другие отклонения баланса — это грамм / сантиметры или таблицы допусков.Обычно смещение используется в процедурах балансировки на местах и в цехах. Для получения дополнительной информации о допусках / градациях балансировки см .: Практическое применение ISO 1940/1.
FREQUENCY = Частота измеряется в единицах cpm, Hz, Orders, т.е. 50 cpm — 750,000 cpm. Знание частоты пиков вибрации помогает точно определить потенциальные источники. Частота используется в расширенном анализе вибрации для определения всех типов частот неисправностей подшипников, спектров в реальном времени, анализа сигнатур тока двигателя и т. Д.
ФАЗА = Фаза — это угол вибрации. Фаза используется для динамического баланса и определяет проблемы резонанса (критической скорости). Фаза не используется в повседневных измерениях или мониторинге вибрации. Фаза вибрации регистрируется с помощью стробоскопа или инфракрасного тахометра в сочетании с анализатором вибрации. Новые технологии и программное обеспечение используются для добавления фазового анализа к окончательной оценке и диагностике.
Наиболее частые причины износа подшипников или полного выхода из строя оборудования — на основе 40-летнего опыта
1) Неправильная установка.Подшипники должны быть правильно установлены и выровнены в трех направлениях с помощью механических уровней и других прецизионных инструментов, чтобы продлить срок службы и контролировать вибрации. В электродвигателях решающее значение имеют посадка колокола и вала. Подшипники должны быть правильно зафиксированы на валу (концентрические стопорные кольца или стопорные гайки / кольца переходника). Валы также должны иметь допуски (не меньше или больше) и не иметь повреждений в месте расположения подшипника. Никогда не устанавливайте новые подшипники в старые / изношенные блоки.Всегда заменяйте весь комплект. В промышленности говорится, что размер = 0,0005 дюйма / 0,0125 мм может сократить срок службы подшипника. В двигателях оба внутренних кольца подшипника должны быть нагреты точно до 110 ° C для расширения, а затем с горячей посадкой на шейку вала для идеальной фиксации. Перед установкой нагретого подшипника обязательно очистите шейки подшипников вала двигателя или заплечики от любых заусенцев тонким напильником и наждачной бумагой, чтобы сгладить поверхность от всех шероховатостей.
2) Несоосность приводов.Точная центровка очень важна для снижения вибрации и продления хорошего состояния различных деталей. Проверьте спецификации производителя муфты и соблюдайте их, используя двойной индикатор часового типа или лазерную центровку. Снимите ограждения ремня во время натяжения ремня и проверьте с помощью уровня, линейки или лазера, чтобы убедиться, что шкивы всегда находятся в пределах допусков.
3) Ремни слишком тугие и / или слишком свободные. Необходимо постоянно поддерживать правильное напряжение. Неисправные ремни следует заменить как можно скорее.При необходимости модернизируйте до улучшенной приводной системы. Проверьте наличие серьезного износа внутри канавок шкива. Было обнаружено, что проблемы с ремнями являются источником резонанса.
4) Неправильная смазка. Слишком много или недостаточно смазки. Наиболее приемлемы смазки хорошего качества EP 1.5 — EP 2 на рынке, но лучше всего подходят синтетические смазки. Таблицы смазки доступны для машин от производителя. При смешивании консистентных смазок выполните лабораторные испытания на совместимость. ПРИМЕЧАНИЕ. Для тяжелого оборудования, такого как большие молотковые дробилки HP или камнедробилки, вам следует связаться с производителями для получения наилучшей смазки.
5) Дисбаланс ротора. Поскольку эта проблема должна быть очевидной, она обычно решается при запуске. Если на машине внезапно возникает вибрация, проверьте, нет ли на роторе износа, скопления мусора, поломки или трещин на деталях. Дисбаланс в машине с регулируемой скоростью обычно проявляется в постепенном увеличении вибрации по мере увеличения скорости и достигает максимума на полной скорости. VIBES Corp специализируется на динамической балансировке вращающихся деталей на месте.
6) Вибрация продолжительная.Иногда грубые вибрации могут быть упущены, потому что машина всегда работала таким образом, то есть гармоники, биения, резонанс, переходная вибрация, изгиб опор, аэродинамическая турбулентность, кавитация насоса и т. Д. В осевых вентиляторах проверьте на наличие «срыва» или на насосах проверьте на кавитацию. «Срыв» осевого вентилятора возникает из-за повышенного сопротивления на входе или выходе и может быть вызван проблемами с демпфером, загрязнением фильтров или змеевиков, дефектами модуляции лопастей вентилятора и другими проблемами системы. «Помпаж» — это то же самое, что «Срыв», только он относится к центробежным вентиляторам.Во время «всплеска вентилятора», который обычно близок к полной или идет на полной скорости, может возникнуть проблема, связанная с тем, что заслонки не открываются или засорены фильтры на входных или выходных экранах. Это сопротивление может вызвать «скачок напряжения», и вы можете заметить сильные осевые колебания или беспорядочные колебания инерционной прокладки.
7) Двигатель работает сверх максимальной силы тока нагрузки, что вызвано превышением скорости ведомого. Проверьте передаточное число шкивов, используйте датчик амперметра, тахометр или стробоскоп, чтобы убедиться, что ведомая скорость является проблемой.
8) Плохая изоляция или ее отсутствие. Проверьте пружины на заземление, слишком большой прогиб или неправильный выбор. Осевые колебания вентиляторов часто можно уменьшить с помощью упорных пружин. Передачу вибрации насоса или трубопровода можно уменьшить с помощью компенсаторов, гибких шлангов или пружинных подвесок.
9) Загрязнение подшипников. Подшипники приводного оборудования, которые находятся в суровых условиях, таких как градирни с вертикальным валом, погодные условия, смесь газов и влаги или очень грязные участки, могут быть загрязнены, если они не защищены специальными уплотнениями, охлаждающими дисками или ограждениями узла вала.Осторожно, не смазывайте моторы слишком сильно. Двигатели также должны быть защищены силиконом вокруг поверхностей звонков и проводных коробок, если они подвергаются воздействию высокой влажности. В качестве альтернативы рассмотрите двигатели с герметичными подшипниками.
10) Неправильный или неправильный выбор подшипника. Иногда при замене подшипников новые подшипники не имеют той же номинальной нагрузки, что и оригинальные. Подшипники всегда должны быть того же номинала, что и оригинальные, и если они постоянно выходят из строя, подумайте о замене подшипников на подшипники с более высокой номинальной динамической нагрузкой. Двигатели большой мощности на ременных передачах должны иметь роликовые подшипники на приводной стороне и неподвижные шариковые подшипники на противоположной стороне.
11) Электроиндуцированное повреждение подшипника (EIBD), также известное как токи вала, или электроэрозионная обработка (EDM). Двигатели, которые работают от 460 В и 575 В с частотно-регулируемым приводом, часто могут столкнуться с этой проблемой, которая вызвана повышением напряжения в роторе и разрядом в миллиамперах (микродуговое искрение) через подшипники обратно в статор.В результате возникают ГРОМКИЕ шумы подшипников от точечной коррозии, остекления, канавок, микротрещин и кратеров тел качения и дорожек качения, а также сгоревшей / загрязненной смазки. Существуют различные решения, позволяющие избежать или преодолеть проблемы EIBD в зависимости от обстоятельств и бюджета, например:
- a) Герметичные подшипники двигателя DE / ODE, заполненные электропроводящей смазкой (Kluber BE-44-152)
- b) Уплотнение / кольцо заземления ротора (AEGIS / InproSeal)
- c) Синусоидальный фильтр (MIRUS INTERNATIONAL)
- г) Керамические втулки (SKF, FAG)
- e) Изолированные подшипники (SKF, FAG)
- f) Электрические индукционные поглотители частотно-регулируемого привода на стороне нагрузки (CoolBlue ™)
- г) Магнитные приводы с регулируемой скоростью ASD (FLUXDRIVE)
Написана более подробная статья, которая доступна на нашем веб-сайте: см. Подробнее о токах на валу / EIBD.См. Спектр виброускорения, показывающий серьезную проблему EIBD здесь.
12) Резонанс — это когда частота вращения и собственная частота близки или точно совпадают. Вы заметите внезапное и значительное увеличение вибрации при резонансе. При преобразовании машины с постоянной скоростью в привод переменной частоты (VFD) или привод с регулируемой скоростью (ASD) вы должны запускать машину медленно, чтобы выявить любой резонанс во всем диапазоне скоростей. Если вы заметили резонанс, вы можете попробовать следующие четыре шага, чтобы контролировать или устранить его:
- a) На VFD или ASD запрограммируйте электронные сигналы, чтобы избежать этой скорости / частоты.Резонанс может проявляться в изменении диапазона скорости на 1 Гц, обычно выше 45 Гц.
- b) Добавьте детали, чтобы придать машине жесткость. Требуются дополнительные тесты.
- c) Добавьте массу в машину. Требуются дополнительные тесты.
- d) Измените передаточное число ведомой скорости на -10% -15%, если это машина с постоянной скоростью.
13) Мягкая опора — Было обнаружено, что мягкая опора вызывает значительное увеличение вибрации, обычно на двигателе.Эту проблему следовало выявить и исправить во время юстировки. Чтобы найти проблемы с деформацией стопы, попробуйте эти два шага:
- a) Используя дисплей (LIVE) на вашем лазерном приборе для юстировки (мягкая лапа) или на дисплее вашего анализатора вибрации (Live), ослабляйте по одной опоре мотора за раз и смотрите на изменения. Затяните каждый болт / гайку ножки перед откручиванием следующего и так далее.
- b) То же испытание, что и выше, но с использованием индикатора часового типа для записи всех данных на четырех лапах (когда машина включена / выключена).
Факт = На двигателе была обнаружена мягкая опора, которая изменяет общую вибрацию с грубого на хороший уровень с небольшим подъемом всего +,002 дюйма.
Мягкая лапа также может быть источником сильного всплеска вибрации на электрической частоте или 7200 CPM, но гораздо более низкий пик при 1x RPM. Причина — нагрузка на корпус статора, когда все четыре опоры двигателя имеют неравномерный контакт.
Вышеупомянутые тесты a) и b) подтвердят, мягкая ли лапа.
Важно: Данные о вибрации должны регистрироваться в одном и том же направлении и месте точечного датчика, если машина или двигатель каждый раз работают с одинаковой нагрузкой / скоростью, иначе отслеживание тенденций может стать бесполезным или запутанным. Если полная скорость невозможна, записывайте каждый раз с одной и той же более низкой скоростью.
Обычно 80% скорости или углы лопастей вентилятора являются удовлетворительными для мониторинга и анализа тенденций вибрации (100% скорость или условия максимальной нагрузки лучше всего подходят для мониторинга и оценки).
Анализ спектра вибрации — расширенное программное обеспечение и сбор данных
Очень важно иметь запись истории базовой вибрации машины после нескольких часов работы в день запуска. Щелкните здесь, чтобы увидеть примеры нескольких спектров вибрации двигателя с использованием скорости, смещения, ускорения в зависимости от частоты. Первоначальные пики двигателя показаны для одного места до дефектов и после того, как дефекты были устранены за несколько посещений.Эти данные называются графиками спектра водопада. Программное обеспечение, такое как Azima DLI ExpertAlert ™, может идентифицировать множество неисправностей. После получения нескольких наборов данных (5 наборов) отчеты Waterfall становятся очень точными для определения тенденций, планирования PM и предотвращения сбоев. В базовых спектрах вибрации оборудования у нас есть все, что нам нужно знать об этом оборудовании в истории базы данных. Как уже упоминалось, когда записывается несколько наборов данных, программное обеспечение ExpertAlert ™ создает точные подробные диагностические отчеты, основанные на правилах.Программное обеспечение EA выявляет определенные частоты отказов подшипников 9500 для всех типов машин и двигателей и сравнивает записанные данные с достоверными данными. См. Еще одну более подробную статью на нашем веб-сайте: Узнайте о вибрации, Том 2: Расширенный анализ вибрации. Вы также можете связаться с Azima DLI для получения информации о продукте. Примечание. Статьи и учебные материалы Vibration постоянно меняются, поэтому ищите обновления на разных сайтах.
Вопросы и ответы
Q1) Как часто мне следует выполнять мониторинг или анализ вибрации на моих машинах?
A1) Оборудование HVAC следует проверять один или два раза в год.Промышленное оборудование следует проверять чаще. Некоторые важные машины находятся под круглосуточным наблюдением. Пример: газовые установки, электростанции, ветряные турбины и т. Д.
Q2) Сколько стоит мониторинг или анализ вибрации?
A2) VIBES Corp будет рада процитировать анализ вибрации, программу мониторинга PdM, проекты динамической балансировки и центровки в любое время. Оборудование можно (базовое) контролировать и проверять по цене от 250 до 350 долларов за машину или меньше.Это всегда дешевле в зависимости от объема на сайт. Стоимость комплексного мониторинга или анализа оборудования будет выше. Стоимость варьируется в зависимости от базового, расширенного, требований к осмотру, количества машин в одном месте, количества посещений в год и местоположения рабочих мест. Компания VIBES Corp будет рада помочь со всеми вашими требованиями к вибрации, балансировке и центровке.
Q3) Следует ли мне рассмотреть возможность установки постоянного вибровыключателя или датчика на мои критически важные машины, двигатели или моторы?
A3) Да.По мере старения оборудования увеличивается вероятность внезапной поломки, связанной с вибрацией. Вибровыключатели и передатчики имеют низкую стоимость (4-20 мА) и обеспечивают круглосуточную защиту, измерение, отслеживание тенденций, сигнализацию, настройки отключения, временные задержки и могут работать через Wi-Fi или установку датчиков вибрации от критических машин до счетчиков панели управления. до 1000 футов. Компьютер можно запрограммировать на подачу сигнала тревоги при превышении максимально установленных пределов, чтобы сразу предупредить вас. Другой недорогой альтернативой является простой выключатель двигателя, такой как выключатель виброударов / выключения MURPHY.Технические характеристики вибрационных продуктов Balmac, Murphy, Spectrum и Wilcoxon можно найти на нашей домашней странице.
Не ждите, пока выйдет из строя машина или двигатель!
Рассмотрите программу VIBES-GUARD PdM ® для всех ваших критически важных машин в соответствии с регулярным графиком и начните сокращать ненужные поломки и расходы в будущем.Мы также можем поставить изделия для защиты от вибрации и системы мониторинга.
Если у вас есть другие вопросы, связанные с какой-либо конкретной вибрацией или шумом оборудования или вам требуются услуги, продажи, обучение или бесплатные презентации VIBES Corp, отправьте электронное письмо VIBES Corp (предпочтительно) или позвоните в любое время: 604-619-9381 (24 / 7).
С уважением,
Гаррет Сандвелл, MET, CVA, ASNT 3
Генеральный директор
© VIBES Corp 2004-2019
Это карта состояния машины, которую можно установить рядом с оборудованием
Загрузите PDF-файл с графиком интенсивности вибрации, если вы хотите распечатать или сохранить его
Загрузите руководство по определению источников вибрации в формате PDF, если вы хотите распечатать или сохранить его
Данные о вибрации записаны с помощью AzimaDLI DCX RT — Software ExpertAlert 3.10 (2013-2016)
Данные о вибрации, записанные с помощью AzimaDLI DCX RT — Software ExpertAlert 3.10 (2013-2016)
Данные о вибрации, записанные с помощью AzimaDLI DCX RT — Software ExpertAlert 3.10 (2013-2016)
Данные о вибрации записаны с помощью AzimaDLI DCX RT — Software ExpertAlert 3.10 (2013-2016)
Данные о вибрации, записанные с помощью AzimaDLI DCX RT — Software ExpertAlert 3.10 (2013-2016)
Данные о вибрации, записанные с помощью AzimaDLI DCX RT — Software ExpertAlert 3.10 (2013-2016)
Это оборудование, которое Vibes Corp использует 2 года с хорошими результатами
Данные о вибрации, записанные с помощью расширенного анализатора спектра данных AzimaDLI CX 8 — Software ExpertAlert 4.0 (2019)
Данные о вибрации, записанные с помощью расширенного анализатора спектра данных AzimaDLI CX 8 — Software ExpertAlert 4.0 (2019)
Данные о вибрации, записанные с помощью расширенного анализатора спектра данных AzimaDLI CX 8 — Software ExpertAlert 4.0 (2019)
Данные о вибрации, записанные с помощью расширенного анализатора спектра данных AzimaDLI CX 8 — Software ExpertAlert 4.0 (2019)
Данные о вибрации, записанные с помощью расширенного анализатора спектра данных AzimaDLI CX 8 — Software ExpertAlert 4.0 (2019)
Данные о вибрации, записанные с помощью расширенного анализатора спектра данных AzimaDLI CX 8 — Software ExpertAlert 4.0 (2019)
Данные о вибрации, записанные с помощью расширенного анализатора спектра данных AzimaDLI CX 8 — Software ExpertAlert 4.0 (2019)
СТАНКИ И ПОДШИПНИКИ
НЕИСПРАВНОСТИ И ОТКАЗЫ
ВРАЩАЮЩИЕСЯ МЕХАНИЧЕСКИЕ ДЕТАЛИ МОГУТ ОБРАБАТЫВАТЬ
К РАЗЛИЧНЫМ ПРОБЛЕМАМ, ТАКИМ КАК БЕЗОПАСНОСТЬ ЛЮДЕЙ,
HVAC / R ИЛИ ПРОИЗВОДСТВЕННЫЕ СИСТЕМЫ ВРЕМЯ ОТЛОЖЕНИЯ И
ОСНОВНЫЕ РАСХОДЫ.
МНОГИЕ ПРОБЛЕМЫ МОЖНО ИЗБЕЖАТЬ ИЛИ НАЙТИ В
ПЕРЕДАЧА ПРОФИЛАКТИЧЕСКОГО ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ
ПРОГРАММА ОСУЩЕСТВЛЯЕТСЯ В ЧИСЛЕ:
— ТОЧНЫЕ МЕХАНИЧЕСКИЕ ОСМОТРЫ И
ПРОФИЛАКТИЧЕСКОЕ ОБСЛУЖИВАНИЕ
— ШУМ И УСКОРЕНИЕ ПОДШИПНИКОВ
— АНАЛИЗ СПЕКТРА ВИБРАЦИИ
— АНАЛИЗ ПРОБЫ МАСЛА
— УСКОРЕНИЕ ПОДШИПНИКА, ТЕМПЕРАТУРА, ШУМ
ИЗМЕРЕНИЯ И ТЕНДЕНЦИИ
Электрически индуцированное повреждение подшипника (EIBD) на дорожке подшипника
Обойма подшипника, показанная на этой фотографии, была обнаружена на продвинутой стадии рифления.
EIBD / Shaft Currents напрямую связано с двигателями VFD на 460 В (США) и 600 В (Канада).
Подробная статья EIBD доступна здесь.
Электрически индуцированное повреждение подшипника (EIBD) на дорожке подшипника
СЭМ-изображение с большим увеличением частиц, расплющенных на внешней поверхности дорожки качения приводного конца, показывающее различные размеры частиц.Очевидно, что во время депонирования материал был расплавленным. Увеличение 4500X.
EIBD / Shaft Currents напрямую связано с двигателями VFD на 460 В (США) и 600 В (Канада).
Подробная статья EIBD доступна здесь.
Электрически индуцированное повреждение подшипника (EIBD) на дорожке подшипника
СЭМ-изображение скола на внутренней поверхности внешней дорожки качения.Увеличение 37,5X.
EIBD / Shaft Currents напрямую связано с двигателями VFD на 460 В (США) и 600 В (Канада).
Подробная статья EIBD доступна здесь.
Для более глубокого понимания вибрации оборудования см. Подробнее о вибрации Том 2: Расширенный анализ вибрации
Вибрационный и электромеханический анализ, Программа VIBES-GUARD PDM ® Контракты на обслуживание, на месте — динамическая балансировка роторов и индивидуальный ремонт,
Муфты, шкивы и приводные валы Лазерная центровка, Испытания и отчеты об электрическом разряде катушки Роговского (ЧРП).
Продажи: Электродвигатели WEG, синтетическая смазка Metalon, Cool Blue (индукционные поглотители), Easy Laser, Balmac / Wilcoxon / Endaq, средства для мониторинга и защиты от вибрации и температуры, (разное) изолирующие пружины, детали привода и подшипники, обработка, изготовление, листовой металл Проекты и экологические покрытия. Узнать о = бесплатные статьи.
МЭМС-мониторинг вибрации: от ускорения к скорости
Введение
Акселерометры
MEMS наконец достигли точки, в которой они могут измерять вибрацию на широком спектре платформ машин.Недавние достижения в их возможностях, а также многие преимущества, которые уже имели акселерометры MEMS по сравнению с более традиционными датчиками вибрации (размер, вес, стоимость, устойчивость к ударам, простота использования), мотивируют использование акселерометров MEMS в новом классе условий: системы мониторинга на основе (CBM). В результате многие архитекторы, разработчики систем CBM и даже их клиенты впервые обращают внимание на эти типы датчиков. Довольно часто они сталкиваются с проблемой быстрого обучения тому, как оценивать способность акселерометров MEMS измерять наиболее важные атрибуты вибрации на их машинных платформах.Поначалу это может показаться трудным, поскольку спецификации акселерометра MEMS часто выражают наиболее важные характеристики производительности в терминах, с которыми эти разработчики могут не быть знакомы. Например, многие знакомы с количественной оценкой вибрации в терминах линейной скорости (мм / с), в то время как в большинстве технических паспортов МЭМС-акселерометров показатели производительности выражаются в терминах ускорения силы тяжести ( g ). К счастью, есть несколько простых методов перевода ускорения в скорость и оценки влияния основных характеристик акселерометра (частотная характеристика, диапазон измерения, плотность шума) на важные критерии системного уровня (полоса пропускания, плоскостность, пиковая вибрация и т. Д.). разрешающая способность).
Основные характеристики вибрации
Этот процесс начинается с анализа линейной вибрации с точки зрения инерционного движения. В этом контексте вибрация — это механическое колебание с нулевым средним смещением. Для тех, кто не хочет, чтобы их машины перемещались по производственному цеху, очень важно нулевое среднее смещение! Значение основного датчика в узле измерения вибрации будет напрямую зависеть от того, насколько хорошо он может отображать наиболее важные атрибуты вибрации машины.Чтобы приступить к оценке возможностей конкретного акселерометра MEMS в этом качестве, важно начать с базового понимания вибрации с точки зрения инерционного движения. На рисунке 1 представлена физическая иллюстрация профиля вибрационного движения, где серый прямоугольник представляет среднюю точку, синее изображение представляет пиковое смещение в одном направлении, а красное изображение представляет пиковое смещение в другом направлении. Уравнение 1 представляет собой математическую модель, которая описывает мгновенное ускорение прямоугольного объекта, когда он колеблется на одной частоте (f V ), с величиной A rms .
Рис. 1. Простое линейное вибрационное движение.
В большинстве приложений CBM вибрация на платформе машины часто будет иметь более сложную спектральную сигнатуру, чем модель в уравнении 1, но эта модель обеспечивает хорошую отправную точку в процессе обнаружения, поскольку она определяет два общих атрибута вибрации, которые Системы CBM часто отслеживают: величину и частоту. Этот подход также полезен для перевода ключевых поведений в линейную скорость (подробнее об этом позже).На рис. 2 представлены спектральные изображения двух различных типов профилей вибрации. Первый профиль (см. Синие линии на рисунке 2) имеет постоянную величину во всем диапазоне частот, который находится между f 1 и f 6 . Второй профиль (см. Зеленые линии на рисунке 2) имеет пики по величине на четырех разных частотах: f 2 , f 3 , f 4, и f 5 .
Рис. 2. Примеры профиля вибрации CM.
Системные требования
Диапазон измерений, частотный диапазон (полоса пропускания) и разрешение — три общих атрибута, которые часто определяют возможности узла измерения вибрации.Красные пунктирные линии на рисунке 2 иллюстрируют эти атрибуты в прямоугольной рамке, которая ограничена минимальной частотой (f MIN ), максимальной частотой (f MAX ), минимальной величиной (A MIN ) и максимальной величиной ( А МАКС ). Рассматривая MEMS-акселерометр на роль основного датчика в узле измерения вибрации, системные архитекторы, вероятно, захотят проанализировать его частотную характеристику, диапазон измерения и шумовое поведение на довольно ранних этапах цикла проектирования.Существуют простые методы оценки каждого из этих характеристик акселерометра, чтобы предсказать его пригодность для заданного набора требований. Очевидно, что системным архитекторам в конечном итоге потребуется подтвердить эти оценки посредством фактической проверки и квалификации, но даже эти усилия будут оценивать ожидания, исходящие от раннего анализа и прогнозирования возможностей акселерометра.
Частотная характеристика
Уравнение 2 представляет собой простую модель первого порядка, которая описывает реакцию акселерометра MEMS (y) на линейное ускорение (a) во временной области.В этом соотношении смещение ( b ) представляет собой значение выходного сигнала датчика, когда он испытывает нулевую линейную вибрацию (или любой тип линейного ускорения). Масштабный коэффициент (K A ) представляет собой величину изменения отклика MEMS-акселерометра (y) по отношению к изменению линейного ускорения (a).
Частотная характеристика датчика описывает значение масштабного коэффициента (K A ) по отношению к частоте. В акселерометре MEMS частотная характеристика имеет два основных фактора: (1) отклик его механической структуры и (2) отклик фильтрации в его сигнальной цепи.Уравнение 3 представляет собой общую модель второго порядка, которая представляет собой аппроксимацию механической части реакции акселерометра MEMS на частоту. В этой модели f O представляет резонансную частоту, а Q представляет добротность.
Вклад сигнальной цепочки часто зависит от фильтрации, которая требуется приложению. Некоторые акселерометры MEMS используют однополюсный фильтр нижних частот, чтобы снизить усиление отклика на резонансной частоте.Уравнение 4 предлагает общую модель частотной характеристики, связанной с этим типом фильтра (H SC ). В этом типе модели фильтра частота среза (f C ) представляет частоту, на которой величина выходного сигнала ниже, чем его входной сигнал в √2 раз.
Уравнение 5 объединяет вклад механической структуры (H M ) и сигнальной цепи (H SC ).
На рис. 3 показано прямое применение этой модели для прогнозирования частотной характеристики ADXL356 (ось x).Эта модель предполагает номинальную резонансную частоту 5500 Гц, добротность 17 и использование однополюсного фильтра нижних частот с частотой среза 1500 Гц. Обратите внимание, что уравнение 5 и рисунок 4 описывают только реакцию датчика. В этой модели не учитывается способ подключения акселерометра к платформе, которую он отслеживает.
Рис. 3. Частотная характеристика ADXL356.
Пропускная способность и плоскостность
В сигнальных цепях, которые используют однополюсный фильтр нижних частот (например, тот, что в уравнении 4) для определения их частотной характеристики, их характеристики полосы пропускания часто определяют частоту, на которой его выходной сигнал обеспечивает 50% мощности входной сигнал.В более сложных ответах, таких как модель третьего порядка из уравнения 5 и рисунка 3, спецификации полосы пропускания часто будут сопровождаться соответствующей спецификацией для атрибута равномерности. Атрибут равномерности описывает изменение масштабного коэффициента в частотном диапазоне (полосе пропускания). Используя моделирование ADXL356 из рисунка 3 и уравнения 5, неравномерность при 1000 Гц составляет примерно 17%, а при 2000 Гц — примерно 40%.
Хотя многим приложениям потребуется ограничить полосу пропускания, которую они могут использовать из-за их требований к равномерности (точности), есть случаи, когда это может быть не так важно.Например, некоторые приложения могут быть больше ориентированы на отслеживание относительных изменений во времени, чем на абсолютную точность. Другой пример может быть получен от тех, кто будет использовать методы цифровой постобработки, чтобы удалить колебания в частотных диапазонах, которые их больше всего интересуют. В этих случаях повторяемость и стабильность отклика часто более важны, чем равномерность отклика в течение заданный частотный диапазон.
Диапазон измерений
Показатель диапазона измерения для акселерометра MEMS представляет собой максимальное линейное ускорение, которое датчик может отслеживать в своем выходном сигнале.При некотором уровне линейного ускорения, выходящем за пределы допустимого диапазона измерения, выходной сигнал датчика насыщается. Когда это происходит, это приводит к значительным искажениям и делает очень трудным (если не невозможным) извлечение полезной информации из измерений. Поэтому важно убедиться, что акселерометр MEMS поддерживает пиковые уровни ускорения (см. A MAX на рисунке 2).
Обратите внимание, что диапазон измерения будет зависеть от частоты, поскольку механический отклик датчика привносит некоторое усиление в отклик, при этом пик отклика усиления происходит на резонансной частоте.В случае смоделированного отклика для ADXL356 (см. Рисунок 3), усиление достигает максимума примерно в 4 раза, что сокращает диапазон измерения с ± 40 г до ± 10 г . Уравнение 6 предлагает аналитический подход к предсказанию этого же числа, используя уравнение 5 в качестве отправной точки:
Большое изменение масштабного коэффициента и уменьшение диапазона измерения — две причины, по которым большинство систем CBM захотят ограничить максимальную частоту своего вибрационного воздействия уровнями, которые значительно ниже резонансной частоты датчика.
Разрешение
«Разрешающая способность инструмента может быть определена как наименьшее изменение в окружающей среде, которое вызывает заметное изменение показаний инструмента». 1 В узле измерения вибрации шум при измерении ускорения будет иметь прямое влияние на его способность обнаруживать изменения вибрации (также известное как «разрешение»). Поэтому шумовое поведение является важным фактором для тех, кто рассматривает акселерометр MEMS для обнаружения небольших изменений вибрации на платформах своих машин.Уравнение 7 обеспечивает простое соотношение для количественной оценки воздействия шума МЭМС-акселерометра на его способность разрешать небольшие изменения вибрации. В этой модели выходной сигнал датчика (y M ) равен сумме его шума (a N ) и вибрации, которую он испытывает (a V ). Поскольку не будет корреляции между шумом (a N ) и вибрацией (a V ), величина выходного сигнала датчика (| y M |) будет равна квадрату квадратного корня из суммы (RSS ) сочетание величины шума (| a N |) и величины вибрации (| a V |).
Итак, какой уровень вибрации требуется для преодоления шумовой нагрузки при измерении и создания наблюдаемого отклика в выходном сигнале датчика? Количественная оценка уровня вибрации с точки зрения уровня шума может помочь исследовать этот вопрос аналитическим способом. Уравнение 8 устанавливает эту взаимосвязь посредством отношения (K VN ), а затем выводит взаимосвязь для прогнозирования уровня изменения выходного сигнала датчика в терминах этого отношения:
В таблице 1 приведены некоторые числовые примеры этой взаимосвязи, чтобы помочь проиллюстрировать увеличение выходного сигнала датчика по отношению к соотношению (K VN ) величин вибрации и шума.Для простоты в оставшейся части этого обсуждения предполагается, что общий шум при измерении датчика определяет его разрешение. Из таблицы 1 это относится к случаю, когда K VN равно единице, то есть когда величина вибрации равна величине шума. Когда это произойдет, величина выходного сигнала датчика увеличится на 42% по сравнению с его выходной величиной при нулевой вибрации. Обратите внимание, что каждому приложению может потребоваться рассмотреть, какой уровень увеличения будет наблюдаться в их системе, чтобы установить соответствующее определение разрешения в этой ситуации.
| К ВН | л / л M л / л N л | Увеличение% |
| 0 | 1 | 0 |
| 0,25 | 1,03 | 3 |
| 0,5 | 1.12 | 12 |
| 1 | 1,41 | 41 |
| 2 | 2,23 | 123 |
Прогнозирование шума датчика
На рисунке 4 представлена упрощенная сигнальная цепочка узла измерения вибрации, который будет использовать акселерометр MEMS. В большинстве случаев фильтр нижних частот обеспечивает некоторую поддержку сглаживания, в то время как цифровая обработка обеспечивает более определенные границы частотной характеристики.В общем, эти цифровые фильтры будут стремиться сохранить содержимое сигнала, которое представляет реальную вибрацию, минимизируя при этом влияние внеполосного шума. Следовательно, цифровая обработка часто является наиболее важной частью системы, которую следует учитывать при оценке ширины полосы шума. Этот тип обработки может иметь форму методов временной области, таких как полосовой фильтр, или спектральных методов, таких как быстрое преобразование Фурье (БПФ).
Рисунок 4. Сигнальная цепь узла измерения вибрации.
Уравнение 9 обеспечивает простое соотношение для оценки общего шума при измерении акселерометра MEMS (A NOISE ), используя его плотность шума (φ ND ) и ширину полосы шума (f NBW ), связанную с сигнальной цепью. .
Используя соотношение в уравнении 9, мы можем оценить, что при использовании фильтра с полосой шума 100 Гц на ADXL357 (плотность шума = 80 мкм г / √Гц) общий шум будет 0,8 м г (среднеквадратичное значение).
Вибрация по скорости
Некоторым приложениям CBM необходимо оценивать поведение основного акселерометра (диапазон, полоса пропускания, шум) с точки зрения линейной скорости. Один из способов сделать это преобразование начинается с простой модели из рисунка 1 и тех же предположений, что и для модели в уравнении 1: линейное движение, одночастотное и нулевое среднее смещение. Уравнение 10 выражает эту модель через математическое соотношение для мгновенной скорости (v V ) объекта на рисунке 1.Величина этой скорости, выраженная через среднеквадратическое значение (rms), равна максимальной скорости, деленной на квадратный корень из 2,
.
Уравнение 11 использует производную этого отношения, чтобы создать соотношение для мгновенного ускорения объекта на рисунке 1:
Начиная с пикового значения модели ускорения из уравнения 11, уравнение 12 выводит новую формулу, которая связывает величину ускорения (A rms ) с величиной скорости (V rms ) и частотой вибрации (f V ). .
Пример использования
Давайте свяжем все это вместе с примером ADXL357, который выражает его диапазон (пик) и разрешение для диапазона частот вибрации от 1 Гц до 1000 Гц в терминах линейной скорости. На рисунке 5 представлено графическое определение нескольких атрибутов, которые будут использоваться в данном тематическом исследовании, начиная с графика плотности шума ADXL357 в диапазоне частот от 1 Гц до 1000 Гц. Для простоты этого обсуждения все вычисления в этом конкретном примере предполагают, что плотность шума постоянна (φ ND = 80 μ g / √Hz) во всем диапазоне частот.Красный спектральный график на Рисунке 5 представляет спектральный отклик полосового фильтра, а зеленая вертикальная линия представляет спектральный отклик одночастотной (f V ) вибрации, что полезно при разработке основанных на скорости оценок разрешения и диапазон.
Рис. 5. Пример из практики: плотность шума и фильтрация.
На первом этапе этого процесса используется уравнение 9 для оценки шума (A NOISE ), который возникает из четырех различных полос шумовых частот (f NBW ): 1 Гц, 10 Гц, 100 Гц и 1000 Гц.В таблице 2 представлены эти результаты в двух различных единицах измерения линейного ускорения: g, и мм / с 2 . Использование g довольно часто встречается в большинстве таблиц спецификаций МЭМС-акселерометров, в то время как показатели вибрации не всегда доступны в этих терминах. К счастью, соотношение между g и 2 мм / с довольно хорошо известно и доступно в уравнении 13.
| f NBW (Гц) | A ШУМ | ||
| (м г ) | (мм / с 2 ) | ||
| 1 | 0.08 | 0,78 | |
| 10 | 0,25 | 2,48 | |
| 100 | 0,80 | 7,84 | |
| 1000 | 2,5 | 24,8 | |
Следующий шаг в этом тематическом исследовании изменяет соотношение в уравнении 12, чтобы получить простую формулу (см. Уравнение 14) для перевода оценок общего шума (из таблицы 2) в линейную скорость (V RES , V ПИК ).В дополнение к общей форме этой зависимости уравнение 14 также предлагает один конкретный пример, использующий полосу шума 10 Гц (и шум ускорения 2,48 мм / с 2 из таблицы 2). Четыре пунктирные линии на рисунке 6 представляют разрешение по скорости для всех четырех полос шумов относительно частоты вибрации (f V ).
Рис. 6. Пик и разрешение в зависимости от частоты вибрации.
В дополнение к представлению разрешения для каждой полосы пропускания на рисунке 6 также представлена сплошная синяя линия, которая представляет пиковые уровни вибрации (линейная скорость) по отношению к частоте.Это происходит из соотношения в уравнении 15, которое начинается с той же общей формы, что и уравнение 14, но вместо использования шума в числителе используется максимальное ускорение, которое может поддерживать ADXL357. Обратите внимание, что коэффициент √2 в числителе масштабирует это максимальное ускорение для отражения среднеквадратичного уровня, предполагая одночастотную модель вибрации.
Наконец, в красном поле показано, как применить эту информацию к требованиям системного уровня. Минимальный (0,28 мм / с) и максимальный (45 мм / с) уровни скорости в этом красном поле взяты из некоторых уровней классификации в общем промышленном стандарте для вибрации машин: ISO-10816-1.Наложение требований на графики диапазона и разрешения для ADXL357 обеспечивает быстрый метод для проведения простых наблюдений, например:
- Наихудший случай диапазона измерения — наивысшая частота, где диапазон ± 40 g ADXL357 кажется способным измерить очень большую часть профилей вибрации, связанных с ISO-10816-1.
- При обработке выходного сигнала ADXL357 фильтром с полосой шума 10 Гц, ADXL357, по-видимому, способен определять самый низкий уровень вибрации из ISO-10816-1 (0.28 мм / с) в диапазоне частот от 1,5 Гц до 1000 Гц.
- При обработке выходного сигнала ADXL357 фильтром с полосой шумов 1 Гц ADXL357 оказывается способным определять самый низкий уровень вибрации из ISO-10816-1 во всем диапазоне частот от 1 Гц до 1000 Гц.
Заключение
Акселерометры
MEMS достигают совершеннолетия как датчики вибрации, и они играют ключевую роль в том, что кажется идеальным штормом конвергенции технологий в системах CBM для современных заводов.Новые решения в области обнаружения, подключения, хранения, аналитики и безопасности объединяются, чтобы предоставить руководителям предприятий полностью интегрированную систему наблюдения за вибрацией и контроля обратной связи процесса. Хотя легко потеряться в восторге от всего этого удивительного технологического прогресса, кому-то все же нужно понимать, как соотнести эти измерения датчиков с реальными условиями и последствиями, которые они представляют. Разработчики CBM и их клиенты смогут извлечь пользу из этих простых методов и идей, которые обеспечат подход к преобразованию спецификаций производительности MEMS в их влияние на ключевые критерии системного уровня с использованием знакомых единиц измерения.
Рекомендации
1. Джеральд К. Гилл и Пол Л. Хекстер. «Сделки IEEE по геолого-геофизической электронике». IEEE , т. 11, вып. 2 апреля 1973 г.
.