Закон Ома для переменных тока и напряжения.Зависимость от частоты. Зависимость частоты от мощности
Формулы зависимость частоты вращения питающей сети. Зависимость частоты и напряжений от баланса мощности
Остановимся прежде всего на основном и общем для рассматриваемых задач вопросе: выясним, от чего зависят величины частоты и напряжений, устанавливающиеся в электроэнергетической системе.
Каждый из приемников энергии, присоединенных к электрической сети, потребляет активную и реактивную мощности, величины которых, как уже отмечалось ранее, определяются величиной напряжения на его зажимах и частотой. Мощность, идущая на питание приемников энергии и покрытие потерь в сети, соединяющей приемники с некоторой узловой точкой системы, в данном режиме нагрузки зависит только от частоты и величины напряжения в данной узловой точке.
Следовательно, нагрузка любой узловой точки однозначно (в области нормальных значений частоты и напряжения) определяется частотой и напряжением в этой точке. Статические характеристики нагрузки в некоторой узловой точке представляют собой, как известно, зависимости активной и реактивной мощностей этой нагрузки от напряжения при заданной частоте. Для различных значений частоты может быть построено семейство подобных характеристик (рис. 2).
Рис. 2. Зависимости активной и реактивной мощности от напряжения
Обеспечить в данной узловой точке некоторые заданные значения частоты и напряжения можно, только передавая к ней из системы совершенно определенные величины активной и реактивной мощностей. Эти величины при заданных частоте и напряжении можно определить по соответствующим статическим характеристикам нагрузок. Если почему-либо из внешней сети в узловую точку будет поступать недостаточная активная или реактивная мощность, то заданные значения частоты и напряжения не могут установиться в этой узловой точке: параметры фактического режима будут иными. Рассмотрим несколько детальнее этот вопрос.
Пусть заданные семейства статических характеристик выражаются в неявной форме следующими зависимостями:
Величины активной и реактивной мощностей, притекающих к данной узловой точке системы, зависят как от величины U и фазы напряжения в этой узловой точке, так и от величин и фаз напряжений в смежных узловых точках и сопротивлений, соединяющих участки сети.
Допустим сначала для простоты, что напряжения у ближайших узловых точек неизменны по величине и фазе и имеют одинаковую частоту f . Тогда в данной узловой точке установится совершенно определенное напряжение, величина и фаза которого определяются из условия баланса активных и реактивных мощностей: суммарные потоки активной и реактивной мощностей в данную узловую точку (Р г и Q г) должны быть равны соответственно активной и реактивной мощностям нагрузки в данной узловой точке (Р н и Q н). При заданной частоте последние будут только функциями напряжения. Тогда
Эти два уравнения с двумя неизвестными и позволяют определить U и .
Покажем, как графически решается эта задача. Совместим на одной диаграмме (рис. 3) характеристику P Н = Ф 1 (U ), соответствующую заданному значению f , и семейство характеристик P г = 1 (U , ), соответствующих тому же значению f , но при разных значениях . Так как P Г = P Н, то из этой диаграммы по точкам пересечения может быть определена зависимость = Ф(U ), соответствующая балансу активных мощностей в узловой точке. Далее аналогичным образом совмещаем на одной диаграмме характеристику Q H = Ф 2 (U ) и семейство характеристик Q Г = 2 (U , ) для различных (рис. 4) и заданного f . При помощи найденной зависимости = Ф(U ) на каждой из характеристик Q Г = 2 (U , ) получим точку, находящуюся на характеристике Q Г = (U ). Соединив эти точки, получим всю характеристику Q Г = (U ), соответствующую балансу активных мощностей. Тогда точка пересечения характеристик Q H = Ф(U ) и Q Г = (U ) определяет фактическое напряжение U Н (рис. 4).
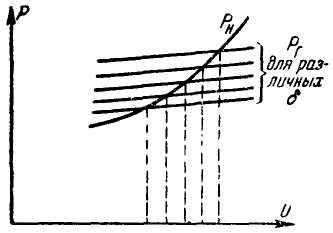
Рис. 3. Определение зависимости угла сдвига (фазы) от величины напряжения
Все наши предыдущие рассуждения относились к случаю неизменности по величине и фазе напряжений в смежных узловых точках и частоты в системе. В действительности такой неизменности нет и напряжения во всех узловых точках могут изменяться по величине и фазе; может также изменяться и частота системы.
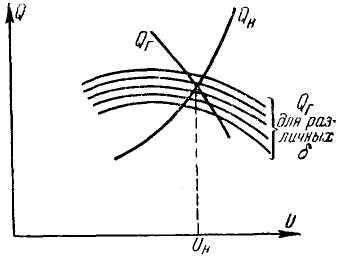
Рис. 4. Построение характеристики зависимости Q от U
Однако в системе можно найти такие узловые точки, в которых поддерживается неизменное по величине и фазе или только по величине напряжение или из которых в сеть передается определенная активная мощность.
При определенном впуске энергоносителя и нормальных значениях параметров режима первичный двигатель развивает мощность, зависящую только от частоты сети, и, следовательно, электромагнитная мощность генератора в этих условиях зависит только от частоты:
P г = Ф(U ).
При постоянстве тока возбуждения генератора неизменной является величина э.д.с. генератора E d , а при наличии регуляторов возбуждения неизменной или почти неизменной будет величина напряжения на его выводах.
В системе должен быть баланс активных и реактивных мощностей: сумма активных и реактивных мощностей всех генераторов должна равняться сумме активных и реактивных мощностей нагрузок всех узловых точек и потерь активной и реактивной мощностей во всех элементах сетей. Следовательно, частота во всей системе, а также величина и фаза напряжения в каждой из узловых точек установятся как раз такими, которые требуются по условию баланса мощностей.
Пусть в системе установился некоторый режим. Изменим впуск энергоносителя в первичный двигатель одного из генераторов. Угол сдвига ротора этого генератора также изменится. Во всей системе произойдет изменение частоты, а также изменение величин и фаз напряжений во всех узловых точках. Эти изменения будут происходить во времени до тех пор, пока не установится новый режим баланса мощностей в системе. Процесс этот является далеко не таким простым, как можно было бы предполагать. В самом деле, например, уменьшение впуска энергоносителя вызовет уменьшение угла сдвига ротора данного генератора относительно других, активные нагрузки других генераторов возрастут. Появится небаланс на валах каждого из этих генераторов, и они начнут тормозиться. В связи с этим генератор, у первичного двигателя которого уменьшился впуск энергоносителя, также должен нач
elektrokomplektnn.ru
Зависимость оборотов от частоты. Зависимость частоты и напряжений от баланса мощности
Выступает одним из параметров качества электроэнергии и основной характеристикой режима энергосистемы. Количественно частота в энергосети равна количеству периодов в секунду. Изменение частоты в сети влияет на функционирование и, соответственно, производительность работы потребителей. Также свое влияние оказывает отклонение частоты на работу всей энергосистемы.
Нормируемые требования к показателям
В РФ требования к качеству работы энергосистемы стандартизированы. В соответствии с ГОСТ 13109-97 частота в энергосистеме должна непрерывно поддерживаться на уровне f = 50 ± 0,2 Гц, при этом допускается кратковременное отклонение частоты до значения ∆f = 0,4 Гц.
Анализируя зависимость силы тока от частоты, можно сделать вывод, что если подключаемая нагрузка имеет чисто активный характер (к примеру, резистор), то в широком диапазоне сила тока от частоты иметь зависимость не будет. В случае достаточно высоких частот, когда индуктивность и ёмкость подключаемой нагрузки будут характеризоваться сопротивлением, сравнимым с активным, то сила тока будет иметь определенную зависимость от частоты.
Другими словами, при варьировании частоты тока происходит изменение ёмкостного сопротивления, изменение которого, в свою очередь, приводит к изменению тока, протекающего по цепи. То есть при повышении частоты, снижается ёмкостное сопротивление , и повышается ток, протекающий по цепи.
Математическое выражение зависимости будет иметь следующий вид:
I = UCω;
Зависимость при учете активного сопротивления будет определяться следующим выражением:
I (ω) = UCω √(R2 . C2 . ω2 + 1).
Влияние частоты тока на электроприборы
Далее рассмотрим влияние частоты электрического тока. Увеличение частоты до сравнительно невысоких величин (1 - 10 тыс. Гц), обычно является следствием исключительно повышения номинальной мощности электроаппаратуры, поскольку таким образом возрастает проводимость газовых промежутков. Для измерения частоты в системе используют частотомеры.
Паровая турбина разрабатываются и создаются таким образом, чтобы при номинальной скорости вращения (частоте) обеспечивалась максимальная выходная мощность на валу. При этом уменьшение номинальной частоты является следствием возникновения потерь на удар пара о лопатки с единовременным повышением момента вращения, а повышение частоты - к снижению момента вращения. Таким образом, наиболее экономичный режим работы достигается при оптимальной частоте.
Помимо этого, работа на пониженных частотах приводит к ускоренному износу рабочих лопаток и прочих частей и механизмов. Снижение частоты оказывает влияние на расход на собственные нужды станций.
Остановимся прежде всего на основном и общем для рассматриваемых задач вопросе: выясним, от чего зависят величины частоты и напряжений, устанавливающиеся в электроэнергетической системе.
Каждый из приемников энергии, присоединенных к электрической сети, потребляет активную и реактивную мощности, величины которых, как уже отмечалось ранее, определяются величиной напряжения на его зажимах и частотой. Мощность, идущая на питание приемников энергии и покрытие потерь в сети, соединяющей приемники с некоторой узловой точкой системы, в данном режиме нагрузки зависит только от частоты и величины напряжения в данной узловой точке.
Следовательно, нагрузка любой узловой точки однозначно (в области нормальных значений частоты и напряжения) определяется частотой и напряжением в этой точке. Статические характеристики нагрузки в некоторой узловой точке представляют собой, как известно, зависимости активной и реактивной мощностей этой нагрузки от напряжения при заданной частоте. Для различных значений частоты может быть построено семейство подобных характеристик (рис. 2).
Рис. 2. Зависимости активной и реактивной мощности от напряжения
Обеспечить в данной узловой точке некоторые заданные значения частоты и напряжения можно, только передавая к ней из системы совершенно определенные величины активной и реактивной мощностей. Эти величины при заданных частоте и напряжении можно определить по соответствующим статическим характеристикам нагрузок. Если почему-либо из внешней сети в узловую точку будет поступать недостаточная активная или реактивная мощность, то заданные значения частоты и напряжения не могут установиться в этой узловой точке: параметры фактического режима будут иными. Рассмотрим несколько детальнее этот вопрос.
Пусть заданные семейства ста
sibay-rb.ru
Как зависит мощность от частоты тока. Зависимость частоты и напряжений от баланса мощности
В настоящее время все производство, практически все распределение и большая часть потребления электроэнергии в энергосистемах выполняются на переменном токе. Поэтому параметры переменного тока — частота, величина и форма кривой напряжения — приобрели значение унифицированных параметров, в соответствии с которыми конструируются все источники, средства передачи и приемники электрической энергии. В особенности это относится к частоте. Практически сохранилось лишь два стандартных значения частоты — 50 Гц в странах Европы, в том числе в России, и 60 Гц в США и Канаде.
В процессе работы энергосистемы все параметры переменного тока могут изменяться. Чем ближе они поддерживаются к номинальным, т.е. расчетным для оборудования, значениям, тем ближе режим к оптимальному. Таким образом, частота приобретает значение показателя, характеризующего качество продукции энергетической промышленности, качества электроэнергии. Согласно ГОСТ 13109—97 на качество электрической энергии частота в энергосистемах России в нормальном режиме должна поддерживаться с точностью ± 0,2 Гц (95 % времени суток). Допускается кратковременная (не более 72 мин в сутки) работа энергосистем с отклонением частоты в пределах ±0,4 Гц.
Столь жесткие требования объясняются тем, что частота переменного тока непосредственно связана с частотой вращения агрегатов, преобразующих механическую энергию в электрическую, т.е. генераторов, и агрегатов, преобразующих электрическую энергию в механическую, т.е. двигателей. Изменение же частоты вращения, даже небольшое, существенно влияет на режим работы вращающихся механизмов. Снижение частоты приводит к падению производительности насосов и других механизмов.
Примером механизма, предъявляющего весьма жесткие требования к точности поддержания частоты вращения, является паровая турбина. Турбостроительные заводы требуют, чтобы частота не оставалась длительно ниже 49,5 Гц и выше 50,5 Гц, иначе возможно повреждение лопаток турбин. Таким образом, наиболее серьезные требования к точности регулирования частоты предъявляются самими электростанциями.
Частота является не только показателем качества электроэнергии, но и важнейшим параметром режима энергосистемы. Непрерывность производства электроэнергии, отсутствие возможности запасать энергию и непрерывное изменение потребления требуют столь же непрерывного контроля за соответствием производства и потребления. Параметром, характеризующим это соответствие, и является частота.
Частота в энергосистеме определяется общим балансом генерируемой и потребляемой активной мощности. Если баланс соблюдается, то частота неизменна. При нарушении баланса мощности, т.е.
tdsl.ru
Зависимость частоты и напряжений от баланса мощности
Остановимся прежде всего на основном и общем для рассматриваемых задач вопросе: выясним, от чего зависят величины частоты и напряжений, устанавливающиеся в электроэнергетической системе.
Каждый из приемников энергии, присоединенных к электрической сети, потребляет активную и реактивную мощности, величины которых, как уже отмечалось ранее, определяются величиной напряжения на его зажимах и частотой. Мощность, идущая на питание приемников энергии и покрытие потерь в сети, соединяющей приемники с некоторой узловой точкой системы, в данном режиме нагрузки зависит только от частоты и величины напряжения в данной узловой точке.
Следовательно, нагрузка любой узловой точки однозначно (в области нормальных значений частоты и напряжения) определяется частотой и напряжением в этой точке. Статические характеристики нагрузки в некоторой узловой точке представляют собой, как известно, зависимости активной и реактивной мощностей этой нагрузки от напряжения при заданной частоте. Для различных значений частоты может быть построено семейство подобных характеристик (рис. 2).
Рис. 2. Зависимости активной и реактивной мощности от напряжения
Обеспечить в данной узловой точке некоторые заданные значения частоты и напряжения можно, только передавая к ней из системы совершенно определенные величины активной и реактивной мощностей. Эти величины при заданных частоте и напряжении можно определить по соответствующим статическим характеристикам нагрузок. Если почему-либо из внешней сети в узловую точку будет поступать недостаточная активная или реактивная мощность, то заданные значения частоты и напряжения не могут установиться в этой узловой точке: параметры фактического режима будут иными. Рассмотрим несколько детальнее этот вопрос.
Пусть заданные семейства статических характеристик выражаются в неявной форме следующими зависимостями:
Величины активной и реактивной мощностей, притекающих к данной узловой точке системы, зависят как от величины U и фазы d напряжения в этой узловой точке, так и от величин и фаз напряжений в смежных узловых точках и сопротивлений, соединяющих участки сети.
Допустим сначала для простоты, что напряжения у ближайших узловых точек неизменны по величине и фазе и имеют одинаковую частоту f. Тогда в данной узловой точке установится совершенно определенное напряжение, величина и фаза которого определяются из условия баланса активных и реактивных мощностей: суммарные потоки активной и реактивной мощностей в данную узловую точку (Рг и Qг) должны быть равны соответственно активной и реактивной мощностям нагрузки в данной узловой точке (Рн и Qн). При заданной частоте последние будут только функциями напряжения. Тогда
и
Эти два уравнения с двумя неизвестными и позволяют определить U и d.
Покажем, как графически решается эта задача. Совместим на одной диаграмме (рис. 3) характеристику PН = Ф1(U), соответствующую заданному значению f, и семейство характеристик Pг=y1(U, d), соответствующих тому же значению f, но при разных значениях d. Так как PГ= PН, то из этой диаграммы по точкам пересечения может быть определена зависимость d = Ф(U), соответствующая балансу активных мощностей в узловой точке. Далее аналогичным образом совмещаем на одной диаграмме характеристику QH = Ф2(U) и семейство характеристик QГ= y2(U, d) для различных d (рис. 4) и заданного f. При помощи найденной зависимости d = Ф(U) на каждой из характеристик QГ= y2(U, d) получим точку, находящуюся на характеристике QГ= j(U). Соединив эти точки, получим всю характеристику QГ= j(U), соответствующую балансу активных мощностей. Тогда точка пересечения характеристик QH = Ф(U) и QГ= j(U) определяет фактическое напряжение UН (рис. 4).
Рис. 3. Определение зависимости угла сдвига (фазы) от величины напряжения
Все наши предыдущие рассуждения относились к случаю неизменности по величине и фазе напряжений в смежных узловых точках и частоты в системе. В действительности такой неизменности нет и напряжения во всех узловых точках могут изменяться по величине и фазе; может также изменяться и частота системы.
Рис. 4. Построение характеристики зависимости Q от U
Однако в системе можно найти такие узловые точки, в которых поддерживается неизменное по величине и фазе или только по величине напряжение или из которых в сеть передается определенная активная мощность.
При определенном впуске энергоносителя и нормальных значениях параметров режима первичный двигатель развивает мощность, зависящую только от частоты сети, и, следовательно, электромагнитная мощность генератора в этих условиях зависит только от частоты:
Pг=Ф(U).
При постоянстве тока возбуждения генератора неизменной является величина э.д.с. генератора Ed, а при наличии регуляторов возбуждения неизменной или почти неизменной будет величина напряжения на его выводах.
В системе должен быть баланс активных и реактивных мощностей: сумма активных и реактивных мощностей всех генераторов должна равняться сумме активных и реактивных мощностей нагрузок всех узловых точек и потерь активной и реактивной мощностей во всех элементах сетей. Следовательно, частота во всей системе, а также величина и фаза напряжения в каждой из узловых точек установятся как раз такими, которые требуются по условию баланса мощностей.
Пусть в системе установился некоторый режим. Изменим впуск энергоносителя в первичный двигатель одного из генераторов. Угол сдвига ротора этого генератора также изменится. Во всей системе произойдет изменение частоты, а также изменение величин и фаз напряжений во всех узловых точках. Эти изменения будут происходить во времени до тех пор, пока не установится новый режим баланса мощностей в системе. Процесс этот является далеко не таким простым, как можно было бы предполагать. В самом деле, например, уменьшение впуска энергоносителя вызовет уменьшение угла сдвига ротора данного генератора относительно других, активные нагрузки других генераторов возрастут. Появится небаланс на валах каждого из этих генераторов, и они начнут тормозиться. В связи с этим генератор, у первичного двигателя которого уменьшился впуск энергоносителя, также должен начать тормозиться, так как при уменьшении углов сдвига роторов остальных генераторов он должен принять добавочную нагрузку. Торможение всех генераторов будет приводить к снижению общей частоты в системе. По мере ее снижения будут уменьшаться активные мощности нагрузок узловых точек в соответствии с их частотными статическими характеристиками и увеличиваться мощности всех других генераторов в соответствии со статическими характеристиками регуляторов скорости первичных двигателей.
Оба эти фактора приведут к тому, что при достаточно большом снижении частоты вновь наступит баланс на валу каждого из генераторов; мощности, развиваемые первичными двигателями, будут балансироваться с мощностями нагрузки
генераторов. Дальнейшее снижение частоты прекратится. Необходимо учесть, что снижение частоты вызывает изменение Э.Д.С. всех генераторов, реактивных сопротивлений всех ветвей системы, а, следовательно, и всех напряжений в сети, что в свою очередь приведет к изменению активных и реактивных нагрузок всех узловых точек в соответствии с их статическими характеристиками по напряжению и частоте. Таким образом, процесс оказывается достаточно сложным.
Рассмотрим другой случай. Пусть уставка регулятора возбуждения на одном из крупных генераторов системы будет снижена. Тогда уменьшится выпуск реактивной мощности от данного генератора, что приведет к снижению напряжения по крайней мере в близлежащем районе электрической сети. Снижение напряжения в свою очередь вызовет уменьшение активных и реактивных нагрузок всех узловых точек в соответствии с их статическими характеристиками по напряжению. Появится небаланс на валу каждого из генераторов; углы сдвига их роторов, а, следовательно, и скорости их вращения будут расти. Это приведет к повышению частоты, так как генераторы, особенно близлежащие, разгрузятся. Частота в системе будет расти, пока не наступит новый баланс, обусловленный ростом активных нагрузок системы. Рост частоты в свою очередь повлияет на увеличение напряжений.
Такова сложная взаимосвязь изменений частоты, напряжения и активных и реактивных мощностей в системе. Однако для решения практических вопросов можно упростить задачу путем некоторой идеализации.
Так, отвлекаясь от изменений напряжений и реактивных мощностей, можно считать, что изменение баланса активных мощностей в системе определенным образом сказывается только на изменении частоты.
Действительно, рост активной нагрузки потребителей или снижение активной мощности генераторов в первую очередь вызывает определенное для данного режима снижение частоты в системе. Практически именно это является наиболее существенным. Менее существенным является то, что это изменение частоты будет в некоторой степени различным в зависимости от того, в какой узловой точке выросла активная нагрузка или у какого именно генератора снизилась активная мощность. Это различие обусловлено влиянием других факторов (напряжений, реактивных мощностей) и не столь велико. Снижение частоты, обусловленное возникновением дефицита активной мощности, обязательно приведет к восстановлению баланса, так как при этом в связи со снижением частоты и напряжений активная нагрузка уменьшается. В то же время регуляторы скорости первичных двигателей и частоты увеличивают впуск энергоносителя, и активная мощность генераторов растет.
Количественное соотношение, т.е. зависимость относительного изменения частоты от относительного небаланса активной мощности, не является неизменным и в зависимости от режима работы системы может колебаться в довольно широких пределах.
← Предыдущая публикация | Следующая публикация →libta.ru
Закон Ома для переменных тока и напряжения.Зависимость от частоты. — КиберПедия
Для переменного тока справедлив закон Ома, однако сопротивление цепи зависит частоты изменения тока.
Переменный ток можно рассматривать как вынужденные электромагнитные колебания. Представим 3 разных цепи, к каждой из которых приложено переменное напряжение U=Umax*cosωt.
Сила тока в цепи с резистром (первый рисунок) будет изменяться в фазе с приложенным напряжением так: I=Imax*cosωt, сила тока в цепи с катушкой индуктивности (центральный рисунок) будет отставать по фазе от приложенного напряжения на π/2 : I=Imax*cos(ωt- π/2), а ток в цепи с конденсатором (правый рисунок) будет опережать по фазе напряжение на π/2 :
I=Imax*cos(ωt + π/2).
Отношение амплитуды напряжения (Umax) к амплитуде силы тока (Imax) по закону Ома выражает сопротивление.
Для цепи с резистором омическое сопротивление R=UmaxR/Imax,
для цепи с катушкой индуктивности – индуктивное сопротивление XL = Umax*L/Imax=Lω,
для цепи с конденсатором – емкостное сопротивление XC = Umax*C/Imax=1/Cω
Реактивное сопротивление — электрическое сопротивление, обусловленное передачей энергии переменным током электрическому или магнитному полю (и обратно).
Величина XL индуктивного сопротивления зависит от индуктивности L элемента и частоты ω протекающего тока. XL =Lω=2πfL. Величина XC ёмкостного сопротивления зависит от ёмкости С элемента и частоты протекающего тока f. XC = 1/Cω=1/2πfC, здесь ω – циклическая частота, равная 2πf.
Прямая и обратная зависимость этих сопротивлений от частоты тока f приводит к тому, что с увеличением частоты всё большую роль начинает играть индуктивное сопротивление и всё меньшую ёмкостное.
16. Импеданс в электрических схемах…
Импеданс - полное электрическое сопротивление цепи переменному току. Полная цепь переменного тока - это цепь из генератора, а также R, C, и Lэлементов, взятых в разных сочетаниях и количествах. Для разбора проходящих в электрических цепях процессов используют полные последовательные и параллельные цепи. Последовательная цепь - это такая цепь, где все элементы могут быть соединены последовательно. При последовательном соединении сопротивления R и емкости Е импеданс: , для угла разности фаз
В параллельной цепи R, C, L элементы соединены параллельно.
для угла разности фаз
Импеданс изменяется с изменением частоты тока, на котором проводится измерение: при увеличении частоты реактивная составляющая импеданса уменьшается. Зависимость импеданса от частоты тока называется дисперсией импеданса.
Особенности полной цепи:
1.Соблюдается закон Ома
2.Полная цепь оказывает переменному току сопротивление. Это сопротивление
называется полным (мнимым, кажущимся) или импедансом.
3.Импеданс зависит от сопротивления всех элементов цепи, обозначается Z и
вычисляется не простым, а геометрическим (векторным) суммированием. Для
последовательно соединенных элементов формула импеданса имеет следующее
значение:
здесь:
Z - импеданс последовательной цепи,
R - активное сопротивление,
XL – индуктивное и XC – ёмкостное сопротивление,
L - индуктивность катушки (генри),
C - ёмкость конденсатора (фарад).
импеданс изменяется с изменением частоты
тока, на котором проводится измерение: при увеличении частоты реактивная составляющая импеданса уменьшается. Зависимость импеданса от частоты тока называется дисперсией импеданса.
Изменение импеданса с частотой обусловлено также зависимостью поляризации от периода Т переменного тока. Если время, в течение которого
электрическое поле направлено в одну сторону (Т/2), больше времени релаксации τ какого-либо вида поляризации, то поляризация достигает своего наибольшего значения, и до тех пор, пока T/2>τ, эффективная диэлектрическая проницаемость и проводимость объекта не будут изменяться с частотой. Если же при увеличении частоты полупериод T/2 переменного тока становится меньше времени релаксации, то поляризация не успевает достигнуть своего максимального значения. После этого диэлектрическая проницаемость начинает
уменьшаться с частотой, а проводимость - возрастать
17 . Электрический диполь- система, состоящая из 2х равных, но противоположных по знаку точечных эл.зарядов, расположенных на некотором расстоянии друг от друга (плечо диполя). Основная
хар-ка эл.диполя – электрический или дипольный момент р(с вектором)=[Кл*м] = произведению заряда на плечо диполя направленный от «-» заряда к «+»
Диполь сам является источником поля.
Понятие о мультиполе.
Диполь является частным случаем системы эл. зарядов, обладающих определенной симметрией. Общее название подобных распределений зарядов – электрические мультиполя.
Они бывают разных порядков(L=0,1,2,и т.д.), число зарядов мультиполя определяется выражением 2L. Так, так мультиполем нулевого порядка(20=1) является одиночный точечный заряд, мультиполем первого порядка(21=2)-диполь, мультиполем второго порядка(22=4)квадруполь, мультиполем третьего порядка(23=8) октуполь.
Потенциал поля мультиполя убывает в значительных расстояниях от него пропорционально 1/RL+1. Так, для заряда (L=0) ).
Если заряд распределен в некоторой области пространства, то потенциал электрического поля вне системы зарядов можно представить в виде некоторого приближенного ряда:
Здесь R – расстояние от системы зарядов до точки А с потенциалом , f1,f2,f3,… - некоторые функции, зависящие от вида мультиполя, его зарядов и от направления на точку А.
19. Токовый монополь- единичный источник электрического потенциала. потенциал поля токового монополя в бесконечно проводящей среде: ,где j-плотность электрического тока,p-удельное сопротивление среды,фи-потенциал электрического поля, r-расстояние от униполя.В вакууме или в идеальном диэлектрике эл.диполь может сохраняться сколько угодно долго. В проводящей среде под действием эл.поля диполя возникает движение свободных зарядов и диполь либо экранируется, либо нейтрализуется. При подключении к диполю источника постоянного напряжения диполь в слабо проводящей среде сохраняется, несмотря на наличии тока, такая двухполюсная система –токовый диполь, а ее полюса- истоком и стоком тока. Дипольный момент токового диполя: Рт=I*l,
l- расстояние между электродами.[Рт]=[А*м].
Потенциал поля токового диполя в безгранично проводящей среде: φ=(1/4πϪ)*(Рт*соsἀ/r2),где Ϫ=1/ρ = удельная эл. проводимость. ρ- удельное сопротивление.
21.Диэлектрики- тела, не проводящие эл. Тока. Относят тв.т: эбонит,фарфор, жидк:чистая вода, газы.
При изменении внешних условий диэлектрик может проводить электрический ток. Изменение состояния диэлектрика при помещении в электрическое поле можно объяснить его молекулярным строением.
Условно выделяют три класса диэлектриков:1) с полярными молекулами;2) с неполярными молекулами;3)кристаллические.
К первому классу принадлежат такие вещ-ва, как вода, нитробензол и др. молекулы этих диэлектриков не симметричны,и они обладают электрическим моментом диполя даже когда электрического поля нет. При отсутствии электрического поля дипольные моменты молекул ориентированы хаотически и векторная сумма моментов всех n молекул равна нулю. Если диэлектрик поместить в электрическое поле, то дипольные моменты молекул стремятся ориентироваться вдоль поля.
Ко второму классу диэлектриков относят такие вещества (водород, кислород), молекулы которых при отсутствии электрического поля не имеют дипольных моментов. Если неполярную молекулу поместить в электрическое поле, то разноименные заряды несколько сместятся в противоположную стороны и молекула будет иметь дипольный момент.
Третий класс-кристаллические диэлектрики(поваренная соль), решетка которых состоит из положительных и отрицательных ионов. Его можно схематически рассматривать как совокупность двух «подрешеток»,одна из которых заряжена+, др--. При отсутствии поля подрешетки расположены симметрично и суммарный электрический момент такого диэлектрика равна нулю. Если диэлектрик поместить в электрическое поле, то подрешетки немного сместятся в противоположные стороны и диэлектрик приобретет электрический момент.
Все эти процессы, происходящие в разных диэлектрика, находящиеся в электрическом поле, объединяют общим термином поляризация, т.е. приобретение диэлектриком полярности.
22. Пьезоэле́ктрики — диэлектрики, в которых наблюдается пьезоэффект, то есть те, которые могут либо под действием деформации индуцировать электрический заряд на своей поверхности (прямой пьезоэффект), либо под влиянием внешнего электрического поля деформироваться (обратный пьезоэффект). Оба эффекта открыты братьями Кюри.
Наряду с пьезоэлектрическим эффектом существует и обратное ему явление: в пьезоэлектрических кристаллах возникновение поляризации сопровождается механическими деформациями. Поэтому, если на металлические обкладки, укрепленные на кристалле, подать электрическое напряжение, то кристалл под действием поля поляризуется и деформируется.
Легко видеть, что необходимость существования обратного пьезоэффекта следует из закона сохранения энергии и факта существования прямого эффекта. При наличии пьезоэффекта на пластинке появляются заряды и возникает электрическое поле, которое заключает в себе дополнительную энергию. По закону сохранения энергии отсюда следует, что при сжатии пьезоэлектрической пластинки совершается большая работа, а значит, в ней возникают дополнительные силы F1, противодействующие сжатию. Это и есть силы обратного пьезоэффекта. Из приведенных рассуждений вытекает связь между знаками обоих эффектов. Если в обоих случаях знаки зарядов на гранях одинаковы, то знаки деформаций различны.
23. Электробезопасность медицинской аппаратуры – комплексная система мероприятий, осуществляемых при разработке, промышленном выпуске и эксплуатации медицинской аппаратуры и направленных на обеспечение полной электробезопасности для обслуживающего персонала и пациентов. Необходимость их обусловлена возможностью поражающего действия электрического тока, используемого в физиотерапевтических аппаратах либо для лечебного воздействия, либо для обеспечения их энергией.
Обеспечение электробезопасности включает три основные группы мероприятий: защита от прикосновения к находящимся под напряжением частям, защита от напряжения прикосновения, защита пациента.
Основное требование – сделать недоступным касание частей аппаратуры находящихся под напряжением. Для этого изолируют части приборов и аппаротов, находящихся под напряжением друг от друга и от корпуса аппаратуры. Изоляция, выполняющая такую роль- основная (рабочая).
Ни одна изоляция не обеспечивает полную безопасность по 2 причинам:
1.сопротивление приборов и аппаратов переменному току не бесконечно, так же оно не бесконечно между проводами электросети и землей.Поэтому при касании человеком корпуса аппаратуры через тело пройдет ток – ток утечки.
2.неисключено, что благодаря порче рабочей изоляции(стар., влажность окр.воздуха) возникает эл.замыкание внутренних частей аппаратуры с корпусом – «пробой на корпус». И внешняя доступная для касания часть апп. окажется под напряжением.
При конструировании и создании мед.аппар. необходимо учитывать допустимую силу тока, как при нормальной работе, так и в случае единичного нарушения - отказ одного из средств защиты от паражения эл.током. допустимые силы токов утечки различают по типам электромедицинских изделий от поражения током.
Н –нормальная степень защиты- такая ст.защиты эквивалентна защите бытовых приборов.
В –изделия с повышенной степенью защиты.
BF- изделия с повышенной степенью защиты и изолированной рабочей частью.
CF-изделия с наивысшей степенью защиты и изолир раб. частью, к этому типу относят в частности изделия с рабочей частью, имеющей эл.контакт с сердцем.♥
24. Классы приборов по способу доп защиты от поражения эл.током.
Н –нормальная степень защиты- такая ст.защиты эквивалентна защите бытовых приборов.
В –изделия с повышенной степенью защиты.
BF- изделия с повышенной степенью защиты и изолированной рабочей частью.
CF-изделия с наивысшей степенью защиты и изолир раб. частью, к этому типу относят в частности изделия с рабочей частью, имеющей эл.контакт с сердцем.♥
Защитное заземление - преднамеренное соединение с землей частей электроустановки. Защитное заземление значительно снижает напряжение, под которое может попасть человек, но это напряжение, может быть не равно нулю. Зануление— преднамеренное электрическое соединение частей электроустановки, нормально не находящихся под напряжением с глухо заземленной нейтралью трансформатора через нулевой провод сети. Быстрое и полное отключение поврежденного оборудования — основное назначение зануления.
Техника безопасности:
- Очень опасно прикосновение к оголенному проводу.
- Опасно пользоваться неисправными электрическими приборами. Электрические приборы должны периодически осматривать квалифицированные специалисты.
- Нельзя собирать, разбирать и исправлять что-либо в электрическом приборе, не отключив его от источника.
25 .Медицинская аппаратура должна нормально функциониро вать.
Важным параметром является вероятность безотказной работы. Она оценивается экспериментально отношением числа N работающих за время t изделий к общему числу N0 испытывавшихся изделий:
Эта характеристика оценивает возможность сохранения изделием работоспособности в заданном интервале времени. Другим количественным показателем надежности является интенсивность отказов лямбда(t). Этот показатель равен отношению числа отказов dN за время dt к произведению времени dt на общее число N работающих элементов:
Знак «—» поставлен в связи с тем, что dN < 0, так как число работающих изделий убывает со временем.
Функция лямбда(t) может иметь различный вид. Наиболее характерная ее форма изображена графически на рис.
три области: I- период приработки. Интенсивность отказов при этом может быть достаточно велика;
II -период нормальнойэксплуатации, интенсивность отказов значительное время может сохранять постоянное значение. III — период старения, интенсивность отказов возрастает со временем. Р- вероятность безотказной работы, λ -интенсивность отказов. Если
λ= const (период II) то:
Закон изменения со временем вероятности безотказной работы. Этот закон можно использовать для оценки надежности аппаратуры.
В зависимости от возможных последствий отказа в процессе эксплуатации медицинские изделия подразделяются на четыре класса:
А — изделия, отказ которых представляет непосредственную опасность для жизни пациента или персонала. Вероятность безотказной работы изделий этого класса должна быть не менее 0,99-в течение установленного для них срока службы. К изделиям этого класса относятся приборы для наблюдения за жизненно важными функциями больного.
Б — изделия, отказ которых вызывает искажение информации о состоянии организма или окружающей среды, не приводящее к непосредственной опасности для жизни пациента или персонала. Вероятность безотказной работы изделий этого класса должна быть не менее 0,8. К таким изделиям относятся системы, следящие за больными, аппараты для стимуляции сердечной деятельности и др.;
В — изделия, отказ которых снижает эффективность или задерживает лечебно-диагностический процесс в некритических ситуациях, либо повышает нагрузку на медицинский или обслуживающий персонал, либо приводит только к материальному ущербу.
Г — изделия, не содержащие отказоспособных частей. Электромедицинская аппаратура к этому классу не относится.
26. Основные группы медицинских электронных приборов и аппаратов.Медицинскую электронную аппаратуру можно разделить на два класса: медицинские приборы и медицинские аппараты. Медицинский прибор -техническое устройство, предназначенное для диагностических или лечебных измерений (медицинский термометр, электрокардиограф)
Медицинский аппарат - техническое устройство, позволяющее создавать энергетическое воздействие (часто дозированное) терапевтического, хирургического или бактерицидного свойства (аппарат УВЧ терапии) и обеспечить сохранение определенного состава некоторых субстанций.
Выделены следующие основные группы приборов и аппаратов, используемые для медико-биологических целей.
- Устройство для получения, передачи и регистрации медико-биологической информации.
-Кибернетические электронные устройства.
В большинстве приборов электрический сигнал, поступающий от преобразователя, должен пройти обработку, прежде чем он примет форму, удобную для дальнейшего его использования в устройстве отображения. Такая модификация или обработка сигнала выполняется в специальных блоках прибора — блоках обработки сигналов.
Электрический сигнал, получаемый от большинства преобразователей, мал, поэтому его следует усилить. Усиление осуществляется с помощью электронных приборов, т. е. приборов, в которых осуществляется управление электронными потоками.
27.Электронный усилитель — усилитель электрических сигналов, в усилительных элементах которого используется явление электрической проводимости в газах, вакууме и полупроводниках.
Усилитель на транзисторе с общей базой(тк входное и выходное напряжение имеют на базе общую точку).
Д-делитель, Е- ЭДС, I-сила тока, Iэ=Iк+Iб; Iб мала, значит Iэ~Iк, R-сопротивление
Источник тока Е эмиттера подключен к эмитерной цепи1 он создает на эмитерном переходе прямое напряжение. Это напряжение(Uвх) можно измерить используюя делитель напряженияД. На коллекторном переходе источник Ек создает обратное напряжение, усиленное по сравнению с Uвых. Напряжение Uвых. снимается с резистора нагрузки Rн коллекторной цепи 2. Работа резистора основана натом, что напряжение и следоват. ток эмиторного перехода влияют на ток в цепи коллектора. Сила тока в цепи коллектора не велика при отсутствии напряжения в эмитерной цепи тк р-n переход между коллектором и базой соответствует запирающему напряжению. Если создать и увеличить напряжение между эмитером и базой, то будет возрастать сила тока в цепи эммитера. Дырки попадая в базу в значительном кол-ве продифундируют через нее и окажутся в коллекторе. Сила тока в цепи коллектора возрастет. Прохождению дырок через р-n переход способствует контактная разность потенциалов между коллектором и базой. В базе дырки могут рекомбинировать с ē и не достигать коллектора, поэтому толщину базы делают достаточно малой и большинство дырок попадают в коллектор. Т.о. сила тока в цепи эмитера оказывает влияние на сопротивление перехода. Uвых=Ек/ 1+(Rк/Rн).
.28Генераторы гармонических колебаний.
1.1 Генераторы синусоидальных колебанийДанная группа генераторов предназначена для получения колебаний синусоидальной формы требуемой частоты. Их работа основана на принципе самовозбуждения усилителя ,охваченного положительной обратной связью (рис.1.1). Коэффициент усиления и коэффициент передачи звена обратной связи приняты комплексными, т.е. учитывается их зависимость от частоты. При этом входным сигналом для усилителя в схеме рис.1.1 является часть его выходного напряжения , передаваемого звеном обратной связи 1.1 – Структурная схема генератора.Для возбуждения колебаний в системе рис.1.1 необходимо выполнение двух условий. Первое состоит в обеспечении баланса фаз, которое заключается в том, чтобы фазовые сдвиги, создаваемые усилителем ( и звеном обратной связи( , в сумме должны быть кратными: .Второе условие , необходимое для возникновения генерации, это условие баланса амплитуд , которое вытекает из общей формулы для усилителя, охваченного положительной обратной связью: .При выполнении баланса амплитуд усилитель компенсирует ослабление сигнала, создаваемое звеном обратной связи, и в схеме возникают устойчивые автоколебания. Для получения синусоидальной формы выходного сигнала используют несколько способов построения схем. Одини из них LC-генераторыНа рис.1.2 показана схема LC-генератора c трансформаторной связью, которая представляет собой усилительный каскад, выполненный по схеме с общим эмиттером. В качестве коллекторной нагрузки используется резонансный LC-контур с высокой добротностью. Р. 1.2 - Схема генератора с трансформаторной связью.
Сигнал обратной связи снимается со вторичной обмотки резонансного контура и через разделительный конденсатор Ср подается на базу транзистора обеспечивая суммарный фазовый сдвиг равный (баланс фаз). Если принять индуктивную связь между первичной (w1) и вторичной (w2) обмотками идеальной, для обеспечения баланса амплитуд необходимо выполнить условие: где - коэффициент усиления по току транзистора, число витков первичной и вторичной обмоток, соответственно. Частота генерируемых колебаний близка к резонансной частоте колебательного контура:
.
29.Осциллограф – это измерительное устройство для визуального наблюдения или записи функциональной зависимости двух величин, преобразованных в электрический сигнал. Осциллографы широко используют для наблюдения временной зависимости переменной величины.Главой частью электронного осциллографа является электронно-лучевая трубка (ЭЛТ). Ее элементы расположены в вакуумном баллоне. Они включают в себя люминесцирующий экран, отклоняющую систему из двух пар отклоняющих пластин и электронную пушку, состоящую из подогревного катода, подобного катоду диода, и специальных электродов, которые ускоряют и фокусируют электроны. На пластины вертикального и горизонтального отклонения подается разность потенциалов. В зависимости от ее знака и значения пучок электронов отклоняется в вертикальном или горизонтальном направлении. Сформированный и определенным образом направленный электронный пучок попадает на люминесцентный экран – переднюю стенку элт, покрытую люминофорами, которые способны светиться под воздействием ударов электронов.Пучок электронов на экране изобразится светящейся точкой. Изменяя напряжение на отклоняющих пластинах, светящуюся точку можно перемещать по экрану. Для наблюдения зависимости сигнала от времени следует светящейся точке сообщить одновременно равномерное движение в горизонтальном направлении.Поэтому напряжение, подаваемое на горизонтально отклоняющиеся пластины, должно иметь пилообразный вид. Для того чтобы периодический процесс отображался на экране неподвижным изображением, необходимо подобрать достаточно точно частоту развертки: на один период времени развертки должно приходиться целое число периодов исследуемого сигнала. Это условие выполнятся блоком синхронизации развертки. Ручки «Диапазон частот» и «Частота плавно» позволяют задавать нужную частоту развертки.. Этот режим развертки действует каждый раз и только тогда, когда возникает регистрируемый процесс.В результате луч движется по экрану слева направо с определенной постоянной скоростью, после чего очень быстро возвращается к левой границе экрана и повторяет свое движение. Расстояние, которое проходит луч вдоль горизонтальной оси, пропорционально времени. Этот процесс называется разверткой, а горизонтальная линия, которую луч прочерчивает по экрану, называется линией развертки.Чувствительность-отклонение светогого пятна при изменении напряжения на отклоняющих пластинах на 1В. Синхронизация это процесс застопорения движущейся линии для получения картинки как Фигуры Лиссажу.
30. Электроды – это проводники специальной формы.Соединяющие измерительную цепь с биологической системой.
Важная физическая проблема. Относящаяся к электродам для съема биоэлектрического сигнала, заключается в минимизации потерь полезной информации, особенно на переходном сопротивлении электрод-кожа. Эквивалентная
электрическая схема контура
Eбп – ЭДС источника биопотенциалов
r–сопротивление внутренних тканей биологической системой
R – сопротивление кожи и электродов контактирующих с ней
Rbx – входное сопротивление усилителя биопотенциалов.
Eбп = Ir + IR+ IRbx = IRi = IRbx (Ri = r+R)
По назначению электроды для съема биоэлектрического сигнала подразделяют на группы:
Для кратковременного применения в кабинетах функциональной диагностики.
Для длительного использования
Для использования на подвижных обследуемых
Для экстренного применения.
Проблемы при использовании электродов в электрофизиологических исследованиях
Возникновение гальванической ЭДС при контакте электродов с биологической тканью
Электролитическая поляризация электродов, что проявляется в выделении на электродах продуктов реакци1 при прохождении тока.
31.Датчиком называют устройство, преобразующее измеряемую или контролируемую величину в сигнал, удобный для передачи, дальнейшего преобразования или регистрации. Датчик, к которому подведена измеряемая величина, т. е. первый в измерительной цепи, называется первичным.В рамках медицинской электроники рассматриваются только такие датчики, которые преобразуют измеряемую или контролируемую неэлектрическую величину в электрический сигнал.. Генераторные датчики под воздействием измеряемого сигнала непосредственно генерируют напряжение или ток: 1) пьезоэлектрические, пьезоэлектрический эффект;
2) термоэлектрические, термоэлектричество 3)индукционные, электромагнитная индукция; 4)фотоэлектрические,фотоэффектПараметрические датчики под воздействием измеряемого сигнала изменяют какой-либо свой параметр. Типы этих датчиков и измеряемый с их помощью параметр:
1)емкостные, емкость;
2)реостатные, омическое сопротивление; 3) индуктивные, индуктивность или взаимная индуктивность.
Чувствительность датчика показывает, в какой мере выходная величина реагирует на изменение входной:
Она в зависимости от вида датчика выражается, например, в (Ом/мм),или (мВ/К) и т. д.
cyberpedia.su
Какая зависимость между габаритными размерами электродвигателей, их мощностью и количеством оборотов?
чем больше двигатель, тем больше мощность но не обороты
Число оборотов электродвигателя не зависит от габаритов, а зависит от количества пар полюсов и частоты питающего напряжения для асинхронных двигателей.
Количество оборотов ( научно-частота вращения) от мощности не зависит. Если это двигатель трехфазный асинхронный, то номинальная частота вращения определяется только числом пар полюсов и частотой сети. Частота вращения меньше при большем числе пар полюсов. Для размещения большего числа пар полюсов требуются большие габариты. Вывод: при меньшей частоте вращения габариты двигателя больше.
Габариты зависяот в 1 очередь от мощности. Во вторую от частоты питающей сети на которую они рассчитаны. В третьих от варианта исполнения. Чем больше мощность тем больше ротор и толщина провода обмоток статора. Чем больше частота - тем меньше толщина проводов обмоток и меньше габарит при той же мощности. Двигатели герметичного и взрывозащищённого исполнения имеют гораздо большие габариты. От количества обмоток размеры не зависят. От количество обмоток зависит число оборотов. Зависимость мощности обратная от числа оборотов т. е. от числа пар полюсов. Так 2 полюса (6 обмоток - по 2 на каждую фазу) - это 3000 об/мин при 50Гц, 4 полюса - 1500 об/мин, 6 - 1000 об/мин, если по 8 полюсов - т. е. 24 обмотки - 750Об/мин. Чем меньше обороты тем больше крутящий момент при одной и той же мощности.. . Надо заметить, что понятия мощность и крутящий момент - это суть две разные вещи.. . Вообщем где-то так в 2х словах :-)
touch.otvet.mail.ru
Регулирование частоты и мощности в энергосистемах — Мегаобучалка
В настоящее время все производство, практически все распределение и большая часть потребления электроэнергии в энергосистемах выполняются на переменном токе. Поэтому параметры переменного тока — частота, величина и форма кривой напряжения — приобрели значение унифицированных параметров, в соответствии с которыми конструируются все источники, средства передачи и приемники электрической энергии. В особенности это относится к частоте. Практически сохранилось лишь два стандартных значения частоты — 50 Гц в странах Европы, в том числе в России, и 60 Гц в США и Канаде.
В процессе работы энергосистемы все параметры переменного тока могут изменяться. Чем ближе они поддерживаются к номинальным, т.е. расчетным для оборудования, значениям, тем ближе режим к оптимальному. Таким образом, частота приобретает значение показателя, характеризующего качество продукции энергетической промышленности, качества электроэнергии.
Частота является не только показателем качества электроэнергии, но и важнейшим параметром режима энергосистемы. Непрерывность производства электроэнергии, отсутствие возможности запасать энергию и непрерывное изменение потребления требуют столь же непрерывного контроля за соответствием производства и потребления. Параметром, характеризующим это соответствие, и является частота.
Частота в энергосистеме определяется общим балансом генерируемой и потребляемой активной мощности. Если баланс соблюдается, то частота неизменна. При нарушении баланса мощности, т.е. при появлении небаланса мощности, возникает переходный процесс изменения частоты. По скорости и направлению изменения частоты можно судить о величине и знаке возникшего в энергосистеме небаланса активной мощности. Если частота в энергосистеме уменьшается, то для восстановления нормальной частоты надо увеличить активную мощность, вырабатываемую на электростанциях.
Задача регулирования частоты подразделяется на три взаимосвязанные части:
· первичное регулирование частоты, обеспечивающее стабильность частоты, т.е. удержание отклонений частоты в допустимых рамках при нарушении общего баланса мощности в любой части энергосистемы;
· вторичное регулирование, обеспечивающее восстановление нормального уровня частоты и плановых режимов обмена мощностью между частями энергосистемы или регионами;
· третичное регулирование, под которым можно понимать оперативную корректировку балансов мощности регионов с целью оказания взаимопомощи регионам и предотвращения опасных перегрузок транзитных линий электропередачи.
Рассмотрим более подробно первичное регулирование частоты. Оно осуществляется автоматическими регуляторами частоты вращения (АРЧВ) турбин. Каждая турбина снабжена регулятором, который при изменении частоты вращения турбоагрегата, изменяя положение регулирующих органов турбины (регулирующих клапанов у тепловой турбины или направляющего аппарата у гидротурбины), меняет впуск энергоносителя (пара или воды).
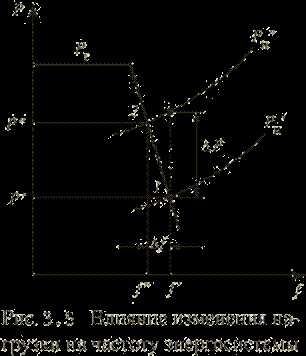
При повышении частоты вращения регулятор прикрывает регулирующие органы турбины и уменьшает впуск энергоносителя, а при снижении частоты открывает регулирующие органы и увеличивает впуск энергоносителя. Статические характеристики двух параллельно работающих агрегатов, снабженных АРЧВ, показаны на рис. 3.3.
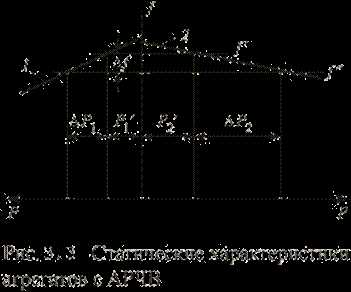
Из рис. 3.3 видно, что при снижении частоты с f' до f" в соответствии со статическими характеристиками регулируемых агрегатов вырабатываемая ими активная мощность увеличивается на ∆P1 и ∆Р2 соответственно, что способствует поддержанию уровня частоты в энергосистеме. Приращение мощности ∆Р пропорционально номинальной мощности агрегата и зависит от наклона характеристики. А наклон характеризуется величиной статизма. При более пологой характеристике 2 меньше статизм и больше изменение мощности ∆Р. У агрегата с более крутой характеристикой 1 статизм больше. Таким образом, суммарное приращение мощности распределяется между агрегатами пропорционально номинальной мощности и обратно пропорционально статизму регулирования. Если необходимо, чтобы агрегат принимал большее участие в первичном регулировании частоты, надо, чтобы у этого агрегата были большая мощность и меньший статизм.
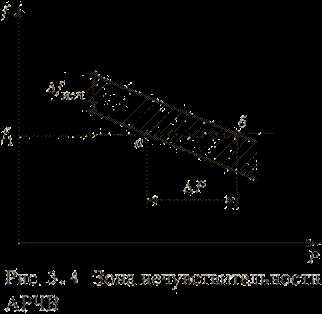
Существенное влияние на процесс регулирования оказывает зона нечувствительности автоматического регулятора частоты вращения, которая необходима для отстройки от малых случайных колебаний нагрузки в энергосистеме. При наличии зоны нечувствительности регулятора появляется диапазон неопределенности в распределении нагрузки между агрегатами. На рис. 3.4 две параллельные линии, отстоящие друг от друга по вертикали на величину зоны нечувствительности ∆fнеч, ограничивают область возможных состояний регулятора и агрегата. Состояние характеризуется частотой f и нагрузкой Р (так называемая рабочая точка). В установившемся режиме при данной частоте, например f1, рабочие точки всех агрегатов расположены на линии f = f1, но могут занимать случайные положения между указанными выше граничными линиями (между точками а и б на рис. 3.4).
Диапазон неопределенных значений нагрузок при параллельной работе агрегатов с регуляторами, имеющими зону нечувствительности, прямо пропорционален зоне нечувствительности регулятора ∆fнеч и обратно пропорционален статизму характеристики регулирования. Чтобы повысить качество регулирования частоты, необходимо по возможности добиваться меньшего статизма. Однако при меньшем статизме существенно увеличивается неопределенность нагрузки агрегата. Поэтому на регуляторах, обладающих большей нечувствительностью, приходится устанавливать больший коэффициент статизма. Величина статизма на гидротурбинах обычно поддается оперативному изменению. Зона нечувствительности отечественных регуляторов гидротурбин не превосходит 0,03 Гц. Зона нечувствительности у отечественных паровых турбин составляет по техническим условиям до 0,15 Гц. Величина статизма оперативному изменению не поддается и составляет обычно 0,04—0,05 (4—5 %). Точность распределения нагрузки, обеспечиваемая регуляторами паровых турбин, невелика: 6—7 %. Но идти на дальнейшее увеличение статизма нельзя, так как это угрожает опасным для целости турбины увеличением максимального отклонения частоты вращения при сбросе нагрузки.
Статические характеристики регуляторов отдельных турбин определяют статическую характеристику энергосистемы в целом. На рис. 3.5 показаны характеристика эквивалентного генератора Рг(f) и зависимость мощности суммарной нагрузки энергосистемы Рн от частоты.
Мощность, потребляемая различными типами электроприемников, по-разному зависит от частоты. Например, мощность, потребляемая лампами накаливания и другими термическими установками, от частоты практически не зависит. Но мощность, потребляемая двигателями металлообрабатывающих станков, насосами и вентиляторами, сильно зависит от частоты. В целом зависимость от частоты мощности комплексной нагрузки энергосистемы, состоящей из электроприемников всех типов, имеет примерно такой вид, как на рис. 3.5.
То, что мощность, потребляемая нагрузкой, уменьшается при снижении частоты, облегчает задачу первичного регулирования (Р" — Р' < ∆Р на рис. 3.5). При увеличении мощности нагрузки и переходе с кривой Р'н на кривую Р"н частота уменьшается, и под действием автоматических регуляторов частоты вращения турбин генерируемая мощность увеличивается с Р' до Р". В течение нескольких секунд осуществляется переход из точки 1 в точку 2 (рис. 3.5). При этом восстанавливается баланс мощности, но при пониженной частоте.
Чем круче идет характеристика генерации Рг(f), тем эффективнее первичное регулирование и меньше отклонение частоты ∆f, т.е. стабильнее частота в энергосистеме. Из рис. 3.5 видно, что в энергосистеме есть резерв генерируемой мощности, поэтому есть возможность увеличивать эту мощность при увеличении мощности нагрузки. Но если не у всех агрегатов есть резерв генерирующей мощности, то крутизна эквивалентной характеристики генерации Рг(f) уменьшается и отклонение частоты ∆f увеличивается, т.е. эффективность первичного регулирования падает.
Следует отметить, что при любой степени эффективности первичное регулирование частоты хотя и ограничивает отклонения частоты, но не способно восстановить нормальный уровень частоты после появления небаланса мощности.
Задачу восстановления нормального уровня частоты решает вторичное регулирование. В отличие от первичного регулирования вторичное регулирование осуществляется в течение нескольких минут. В результате действия вторичного регулирования и восстановления нормальной частоты ликвидируются изменения режима, вызванные первичным регулированием частоты. Электростанции и потребители возвращаются в исходный режим работы. Компенсацию всего первоначально возникшего небаланса мощности принимают на себя электростанции вторичного регулирования частоты до тех пор, пока не будет нормализован режим в месте его первоначального нарушения.
Электростанции вторичного регулирования частоты должны быть достаточно мощными и поддерживать необходимый диапазон регулирования, обладать хорошими маневренными качествами. Энергоблоки ТЭС рассчитаны на базисный режим работы. Однако в настоящее время они все шире привлекаются к регулированию суточного графика нагрузки, причем диапазон регулирования их ограничен. Предельно допустимая разгрузка блоков зависит от вида сжигаемого топлива и составляет 20—40 % при работе на угле и 40—60 % при работе на газе и мазуте. Разгрузка энергоблоков неизбежно приводит к снижению их экономичности. Уже при нагрузках 50 % номинальной их экономичность ухудшается на 5—6 % при работе на газомазутном топливе и на 7—8 % при работе на угле. Гидроагрегаты имеют существенно больший диапазон регулирования (за исключением периода паводка), меньшую зону нечувствительности АРЧВ. Поэтому обычно именно гидроэлектростанции участвуют во вторичном регулировании частоты.
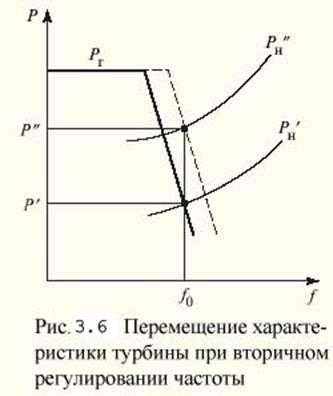
Вторичное регулирование осуществляется за счет перемещения характеристики АРЧВ агрегата параллельно самой себе при помощи механизма управления турбиной. Соответственно перемещается и характеристика эквивалентного генератора, как показано на рис. 3.6.
В крупных энергосистемах появляется необходимость поддержания соответствия производства и потребления электроэнергии не только в энергосистеме в целом, но и в отдельных ее частях (регионах). Эта необходимость может быть связана с хозяйственной самостоятельностью частей энергосистемы или с недостаточной пропускной способностью линий электропередачи, ограничивающей обмен мощностью между частями энергосистемы. Поддержание соответствия между потреблением и производством внутри регионов требует регулирования не только частоты, но и перетоков мощности.
С ростом энергосистем и их объединением колебания частоты уменьшаются, необходимость же в регулировании перетоков обычно возрастает, так как увеличивается вероятность появления слабых связей, имеющих недостаточную пропускную способность. Поэтому регулирование перетоков мощности становится во многих случаях задачей не менее важной, чем регулирование частоты. Поскольку вручную решать эту задачу весьма сложно, создаются системы автоматического регулирования частоты и мощности.
В объединенных энергосистемах применяются два основных принципа вторичного регулирования частоты и мощности:
· централизованное регулирование частоты в сочетании с региональным регулированием мощности электростанций;
· децентрализованное комплексное регулирование частоты и перетоков мощности.
В основе централизованного принципа лежит регулирование одной энергосистемой частоты, т.е. баланса мощности во всем энергообъединении независимо от места возникновения небаланса мощности, и регулирование своих перетоков мощности другими энергосистемами независимо от частоты. Этот принцип обладает достаточной эффективностью, если у регулирующей энергосистемы имеются достаточный резерв мощности и диапазон регулирования и если межсистемные линии электропередачи не ограничивают своей пропускной способностью возможность компенсации небаланса мощности, возникающего в любой энергосистеме.
Основным недостатком данного принципа являются неравноправные взаимоотношения энергосистем объединения, одна из которых несет затраты на содержание регулировочных мощностей для всех энергосистем.
Принцип децентрализованного вторичного регулирования наиболее распространен в мировой практике регулирования режима в межгосударственных объединениях энергосистем различных стран (UCTE, NORDEL и др.).
Основным преимуществом данного принципа является справедливое и равноправное участие партнеров по параллельной работе в поддержании нормального уровня частоты и согласованных перетоков мощности. При этом обеспечивается устранение в данной энергосистеме небаланса мощности независимо от того, является ли он единственной причиной отклонения частоты или существует одновременно с наличием небалансов в других энергосистемах.
К недостаткам принципа относится необходимость оперативного вмешательства для восстановления частоты при неустранении энергосистемой-«виновницей» своего небаланса. В этом случае осуществляется третичное регулирование режима.
В заключение рассмотрим кратко современное состояние регулирования частоты и мощности в Единой энергетической системе России. Анализируется и исследуется возможность создания энергообъединения «Восток — Запад» на основе использования уже существующих линий электропередачи переменного тока 400—750 кВ между Украиной и странами Центральной Европы. В связи с этим проведены исследования качества регулирования частоты в Западной и Восточной зонах будущего энергообъединения. Исследования показали более низкую стабильность частоты в Восточной зоне (среднесуточные отклонения частоты на Западе 10—20 мГц, а на Востоке — большие значения). Особенно большие отклонения на Востоке происходят весной и во второй половине ночи, что говорит об отсутствии гибкости средств регулирования, особенно энергоблоков ТЭС, о трудностях разгрузки энергоблоков и о недостаточности средств краткосрочного регулирования, что объясняется в основном следующими причинами:
· величина и характеристики вращающегося резерва не являются жестко регламентированными;
· крупные тепловые и тем более атомные электростанции в регулировании частоты практически не участвуют из-за их низкой маневренности и неготовности к этому оборудования и технологической автоматики;
· вследствие неудовлетворительной структуры генерирующих мощностей (недостаточная мощность ГЭС, одна ГАЭС на всю Россию, отсутствие на ТЭС энергоблоков с хорошей маневренностью и т. п.) нет возможности поддерживать баланс мощности при нормальной частоте в отдельные ночные часы и в период паводка из-за недостаточного регулировочного диапазона ТЭС. Энергоблоки мощностью 300 и 800 МВт в первичном и вторичном регулировании частоты недоиспользуются. Одной из причин этого является отсутствие материальной заинтересованности электростанций в активном участии в регулировании частоты в энергосистеме.
В настоящее время прорабатываются мероприятия, которые позволят повысить качество регулирования частоты в ЕЭС России, что важно не только в связи с перспективой создания энергообъединения «Восток — Запад», но и для самой ЕЭС России.
megaobuchalka.ru









Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






