
Подключение асинхронного двигателя на 220 (видео, фото, схема)
Так как питающие напряжения у различных потребителей могут различаться друг от друга, возникает необходимость переподключения электрооборудования. Сделать подключение асинхронного двигателя на 220 вольт безопасным для дальнейшей работы оборудования достаточно просто, если следовать предложенной инструкции.
На самом деле это не является невыполнимой задачей. Если сказать коротко, то все, что нам нужно, это правильно подключить обмотки. Существует два основных типа асинхронных двигателей: трехфазные с обмоткой звезда – треугольник, и двигатели с пусковой обмоткой (однофазные). Последние используются, например, в стиральных машинах советской конструкции. Их модель АВЕ-071-4С. Рассмотрим каждый вариант по очереди.
Трехфазный
Асинхронный двигатель переменного тока имеет очень простую конструкцию по сравнению с другими видами электрических машин. Он довольно надежен, чем и объясняется его популярность. К сети переменного напряжения трехфазные модели включаются звездой или треугольником. Такие электродвигатели также различаются значением рабочего напряжения: 220–380 в, 380–660 в, 127–220 в.
К сети переменного напряжения трехфазные модели включаются звездой или треугольником. Такие электродвигатели также различаются значением рабочего напряжения: 220–380 в, 380–660 в, 127–220 в.
Такие электродвигатели применяются на производстве, так как трехфазное напряжение чаще всего используется именно там. И в некоторых случаях бывает, что вместо 380 в есть трехфазное 220. Как их включить в сеть, чтобы не спалить обмотки?
Переключение на нужное напряжение
Для начала необходимо убедиться в том, что наш двигатель имеет нужные параметры. Они написаны на бирке, прикрепленной у него сбоку. Там должно быть указано, что один из параметров – 220в. Далее, смотрим подключение обмоток. Стоит запомнить такую закономерность схемы: звезда – для более низкого напряжения, треугольник – для более высокого. Что это означает?
Увеличение напряжения
Предположим, на бирке написано: Δ/Ỵ220/380. Это значит, что нам нужно включение треугольником, так как чаще всего соединение по умолчанию – на 380 вольт. Как это сделать? Если электродвигатель в борне имеет клеммную коробку, то несложно. Там есть перемычки, и все, что нужно – переключить их в нужное положение.
Как это сделать? Если электродвигатель в борне имеет клеммную коробку, то несложно. Там есть перемычки, и все, что нужно – переключить их в нужное положение.
Но что, если просто выведено три провода? Тогда придется аппарат разбирать. На статоре нужно найти три конца, которые между собой спаяны. Это и есть соединение звездой. Провода нужно рассоединить и подключить треугольником.
В данной ситуации это сложностей не вызывает. Главное помнить, что есть начало и конец катушек. К примеру, возьмем за начало концы, которые были выведены в борно электродвигателя. Значит то, что спаяно – это концы. Теперь важно не перепутать.
Подключаем так: начало одной катушки соединяем с концом другой, и так далее.
Как видим, схема простая. Теперь двигатель, который был соединен для 380, можно включать в сеть 220 вольт.
Уменьшение напряжения
Предположим, на бирке написано: Δ/Ỵ 127/220. Это означает, что нужно подсоединение звездой. Опять же, если есть клеммная коробка, то все хорошо. А если нет, и включен наш электродвигатель треугольником? А если еще и концы не подписаны, то как их правильно соединить? Ведь здесь тоже важно знать, где начало намотки катушки, а где конец. Есть некоторые способы решения этой задачи.
А если нет, и включен наш электродвигатель треугольником? А если еще и концы не подписаны, то как их правильно соединить? Ведь здесь тоже важно знать, где начало намотки катушки, а где конец. Есть некоторые способы решения этой задачи.
Для начала разведем все шесть концов в стороны и омметром найдем сами статорные катушки.
Возьмем скотч, изоленту, еще что-нибудь из того, что есть, и пометим их. Пригодится сейчас, а может быть, и когда-нибудь в будущем.
Берем обычную батарейку и подсоединяем к концам а1-а2. К двум другим концам (в1-в2) подсоединяем омметр.
В момент разрыва контакта с батарейкой стрелка прибора качнется в одну из сторон. Запомним, куда она качнулась, и включаем прибор к концам с1-с2, при этом не меняем полярность батарейки. Проделываем все заново.
Если стрелка отклонилась в другую сторону, тогда меняем провода местами: с1 маркируем как с2, а с2 как с1. Смысл в том, чтобы отклонение было одинаковым.
Смысл в том, чтобы отклонение было одинаковым.
Теперь батарейку с соблюдением полярности соединяем с концами с1-с2, а омметр – на а1-а2.
Добиваемся того, чтобы отклонение стрелки на любой катушке было одинаковым. Перепроверяем еще раз. Теперь один пучок проводов (например, с цифрой 1) у нас будет началом, а другой – концом.
Берем три конца, например, а2, в2, с2, и соединяем вместе и изолируем. Это будет соединение звездой. Как вариант, можем вывести их в борно на клеммник, промаркировать. На крышку наклеиваем схему соединения (или рисуем маркером).
Переключение треугольник – звезда сделали. Можно подключаться к сети и работать.
Однофазный
Теперь поговорим еще об одном виде асинхронных электродвигателей. Это однофазные конденсаторные машины переменного тока. У них две обмотки, из которых, после пуска, работает только одна из них. Такие двигатели имеют свои особенности. Рассмотрим их на примере модели АВЕ-071-4С.
По-другому они еще называются асинхронными двигателями с расщепленной фазой. У них на статоре намотана еще одна, вспомогательная обмотка, смещенная относительно основной. Пуск производится при помощи фазосдвигающего конденсатора.
У них на статоре намотана еще одна, вспомогательная обмотка, смещенная относительно основной. Пуск производится при помощи фазосдвигающего конденсатора.
Схема однофазного асинхронного двигателя
Из схемы видно, что электрические машины АВЕ отличаются от своих трехфазных собратьев, а также от коллекторных однофазных агрегатов.
Всегда внимательно читайте, что написано на бирке! То, что выведено три провода, абсолютно не значит, что это для подключения на 380 в. Просто спалите хорошую вещь!
Включение в работу
Первое, что нужно сделать, это определить, где середина катушек, то есть, место соединения. Если наш асинхронный аппарат в хорошем состоянии, то это сделать будет проще – по цвету проводов. Можно посмотреть на рисунок:
Если все так выведено, то проблем не будет. Но чаще всего приходится иметь дело с агрегатами, снятыми со стиральной машины неизвестно когда, и неизвестно кем. Здесь, конечно, будет сложнее.
Здесь, конечно, будет сложнее.
Стоит попробовать вызвонить концы при помощи омметра. Максимальное сопротивление – это две катушки, соединенные последовательно. Помечаем их. Дальше, смотрим на значения, которые показывает прибор. Пусковая катушка имеет сопротивление больше, чем рабочая.
Теперь берем конденсатор. Вообще, на разных электрических машинах они разные, но для АВЕ это 6 мкФ, 400 вольт.
Если точно такого нет, можно взять с близкими параметрами, но с напряжением, не ниже 350 В!
Давайте обратим внимание: кнопка на рисунке служит для пуска асинхронного электродвигателя АВЕ, когда он уже включен в сеть 220! Другими словами, должно быть два выключателя: один общий, другой – пусковой, который, после его отпускания, отключался бы сам. Иначе спалите аппарат.
Если нужен реверс, то он делается по такой схеме:
Если все сделано правильно, тогда будет работать. Правда, есть одна загвоздка. В борно могут быть выведены не все концы. Тогда с реверсом будут сложности. Разве что разбирать и выводить их наружу самостоятельно.
Правда, есть одна загвоздка. В борно могут быть выведены не все концы. Тогда с реверсом будут сложности. Разве что разбирать и выводить их наружу самостоятельно.
Вот некоторые моменты, как подсоединять асинхронные электрические машины к сети 220 вольт. Схемы несложные, и при некоторых усилиях вполне возможно все это сделать собственными руками.
Особенности работы асинхронных двигателей / Статьи и обзоры / Элек.ру
Традиционно для кранового электропривода применяются специально разработанные серии электродвигателей переменного и постоянного тока. По геометрии магнитопровода, степени использования электротехнических материалов, электромеханическим характеристикам и конструктивному исполнению такие электродвигатели существенно отличаются от двигателей общепромышленного исполнения.
Режим работы электродвигателей в крановом электроприводе характеризуется широким изменением нагрузок, частыми пусками и торможениями, широким диапазоном изменения скорости ниже и выше номинальной (в электроприводах постоянного тока и частотно- регулируемых электроприводах).
Крановые двигатели рассчитаны для работы в повторно-кратковременном режиме, который характеризуется продолжительностью включения (ПВ) 15, 25, 40 и 60% при продолжительности цикла не более 10 мин. Основным номинальным режимом крановых двигателей переменного тока является ПВ=40%.
Из-за высоких требований к динамике двигателей в переходных процессах пуска и торможения и для снижения расхода энергии при этом двигатели конструируются таким образом, чтобы момент инерции ротора был, по возможности, минимальным. Снижение момента инерции достигается путем уменьшения высоты оси вращения при заданной мощности двигателя.
Электродвигатели имеют повышенный (по сравнению с электродвигателями общепромышленного исполнения) запас прочности механических узлов и деталей. Крепление пакета ротора на валу всегда производится при помощи шпонки.
Традиционно, основное применение в крановых электроприводах находят асинхронные двигатели с фазным ротором. Регулирование скорости и момента в электроприводах с такими двигателями производится включением в цепь ротора пускорегулирующих резисторов. Для получения пониженных (посадочных) скоростей опускания груза применяется режим противовключения или различные специальные схемы включения (например – динамического торможения самовозбуждением).
Для получения пониженных (посадочных) скоростей опускания груза применяется режим противовключения или различные специальные схемы включения (например – динамического торможения самовозбуждением).
Существуют также модификации крановых асинхронных двигателей с короткозамкнутым ротором (при мощности до 30 кВт) для применения в электроприводах, имеющих, как правило, низкие номинальные скорости и не требующие их регулирования. Кроме того, существуют модификации крановых электродвигателей в двух и трехскоростном исполнении.
Все эти двигатели рассчитаны на питание от промышленной сети стандартного напряжения 220/ 380 В при частоте 50 Гц. Хотя это не означает, что они не могут работать в составе частотно- регулируемых электроприводов, тем не менее, в последнее время разрабатываются специальные серии асинхронных двигателей, в том числе и крановых, оптимизированные для работы в системах частотного регулирования.
Таким образом, крановые асинхронные двигатели в настоящее время условно можно разделить на электродвигатели с фазным и короткозамкнутым ротором, предназначенные для питания от промышленной сети, и короткозамкнутые электродвигатели для частотно- регулируемых электроприводов.
Крановые асинхронные двигатели с фазным и короткозамкнутым ротором, предназначенные для питания от промышленной сети
Отечественной промышленностью выпускаются асинхронные крановые электродвигатели с фазным и короткозамкнутым ротором, одно- и двухскоростные. Для применения на кранах общего назначения выпускаются электродвигатели с классом нагревостойкости изоляции F, для кранов и агрегатов металлургического производства — класса H.
Основные серии двигателей: фазные — MTF, MTH, 4MTF, 4MTH, 4MTM и короткозамкнутые – MTKF, MTKH, 4MTKF, 4MTKH. Короткозамкнутые электродвигатели выпускаются мощностью до 30 кВт. Кроме того, для малых мощностей выпускаются двигатели DMTF, DMTKH, AMTF, AMTKH.
Двухскоростные двигатели выпускаются сериями MTKH, 4MTKH и 5АТ.
Двигатели представлены в шести-, восьми- и десятиполюсном исполнениях. Быстроходные обмотки двухскоростных двигателей выпускаются также в четырехполюсном исполнении.
Основное конструктивное исполнение двигателей — горизонтальное на лапах с одним концом вала. Двигатели серии 4МТ отличаются от двигателей серии МТ установочно- присоединительными размерами, двигатели 4МТ выпускаются в соответствии с нормами МЭК.
Двигатели серии 4МТ отличаются от двигателей серии МТ установочно- присоединительными размерами, двигатели 4МТ выпускаются в соответствии с нормами МЭК.
Электродвигатели всех габаритов изготавливаются в закрытом обдуваемом исполнении, двигатели мощностью свыше 45 кВт, кроме того, в защищенном исполнении с независимой вентиляцией от внешнего вентилятора с электроприводом.
Следуют отметить, что крановые электродвигатели большинство времени работают на номинальных скоростях, где эффективность самовентиляции велика. Поэтому независимая вентиляции в крановых двигателях применяется в электроприводах интенсивного режима работы, где велика доля пусковых и тормозных потерь, и где ее применение позволяет избежать увеличения статической мощности.
Представляет интерес возможность использования крановых асинхронных двигателей с фазным и короткозамкнутым ротором предназначенных для питания от промышленной сети в составе частотно-регулируемого электропривода. В настоящее время имеется положительный опыт эксплуатации асинхронных двигателей мощностью до 55 кВт с закороченным фазным ротором при питании от преобразователей частоты. Такое техническое решение принималось при модернизации кранов, оборудованных традиционными системами кранового электропривода на базе асинхронного двигателя с фазным ротором. Для снижения стоимости такой модернизации сохранялись электродвигатели и, в ряде случаев, пускорегулирующие резисторы, которые применялись в качестве тормозных.
Такое техническое решение принималось при модернизации кранов, оборудованных традиционными системами кранового электропривода на базе асинхронного двигателя с фазным ротором. Для снижения стоимости такой модернизации сохранялись электродвигатели и, в ряде случаев, пускорегулирующие резисторы, которые применялись в качестве тормозных.
Электродвигатель с фазным ротором, выбранный для работы в традиционной системе кранового электропривода с реостатным регулированием при переводе его на питание от преобразователя частоты (если режим работы механизма не превышается), всегда имеет меньший уровень пусковых потерь. При векторном управлении, как правило, снижаются потери и в установившемся режиме, так как при частичной нагрузке в электроприводе производится оптимизация энергопотребления.
Короткозамкнутые крановые электродвигатели серий МТ и 4МТ мощностью до 30 кВт достаточно широко применяются при создании крановых электроприводов механизмов горизонтального перемещения (например, на башенных кранах), а в ряде случаев и в электроприводах механизмов подъема.
Частотно-регулируемые крановые электродвигатели
Работа асинхронных двигателей в системах частотного регулирования имеет свои особенности. Прежде всего, при частотном управлении значительно снижаются потери энергии в двигателях в пуско-тормозных режимах. Это позволяет переходить на более высокооборотные электроприводы, и при проектировании двигателей основное внимание уделять снижению потерь в обмотках двигателя в номинальном режиме. При проектировании двигателей для системы частотного регулирования учитывается следующее:
- Основные соотношения между геометрическими размерами, принятые для крановых асинхронных двигателей, сохраняются, поскольку определяющим здесь является режим работы, а не система регулирования.
- В современных частотно-регулируемых электроприводах с векторным управлением механические характеристики формируется системой управления преобразователя. Поэтому при проектировании электродвигателей, предназначенных для работы только с преобразователями частоты, можно не предпринимать специальные меры для повышения перегрузочной способности и пускового момента.

- Оптимальные частоты вращения двигателей в системах частного регулирования, как уже было сказано, выше, чем в обычных системах, и составляют 1900-1800 об/мин для легкого и среднего режимов работы и до 1000 — 800 об/мин — для тяжелого режима. Однако при проектировании следует согласовывать максимальную частоту вращения разрабатываемого электропривода и максимальную допустимую частоту вращения редуктора.
- Двигатели должны быть работоспособны при повышении частоты выходного напряжения преобразователя в 1,5-2 раза по отношению к номинальной частоте.
- С целью снижения потерь обмотка ротора двигателя заливается чистым алюминием или выполняется медной, скольжение при этом — минимальное. Регулирование выходного напряжения и частоты двигателя позволяет оптимизировать использование его активных частей и обеспечить работу двигателя в режиме минимальных потерь.
- Возможно исполнение двигателей на нестандартное напряжение, соответствующее выходному напряжению преобразователя частоты.


Все эти мероприятия, а также оптимальное разграничение зон регулирования, позволяют при одинаковой нагрузке снизить в 1,5-1,8 раза мощность двигателя в частотно-регулируемом приводе.
Специальная серия крановых двигателей для частотно-регулируемых электроприводов выпускается отечественной промышленностью. Эта серия включает в себя двигатели типа АД2КД мощностью от 4 до 11 кВт в шести- и четырехполюсном исполнениях с пристроенными дисковыми тормозами и двигатели 4МТКД мощностью от 22 до 110 кВт в шести- и восьмиполюсном исполнениях. Двигатели 4МТКД выполнены с использованием основных узлов традиционных двигателей серии 4МТН и изготавливаются в закрытом обдуваемом исполнении, а также с вентиляцией, не зависимой от внешнего вентилятора с электроприводом.
Преимущества и недостатки асинхронного двигателя
Подавляющее большинство электродвигателей, используемых в промышленности – асинхронные двигатели с короткозамкнутым ротором. В новом оборудовании их доля составляет более 95%, остальное – серводвигатели, шаговые двигатели, щеточные двигатели постоянного тока и некоторые другие специфические виды приводов.
Преимущества асинхронного двигателя
Конструкция. По сравнению с другими типами электродвигателей асинхронный двигатель имеет наиболее простую конструкцию. С одной стороны это объясняется использованием стандартной трехфазной системы электроснабжения, с другой – принципом действия агрегата. Данная особенность обуславливает еще одно важное преимущество — невысокую цену асинхронных приводов. Среди двигателей разных типов одинаковой мощности асинхронный будет самым дешевым.
Подключение. Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на 120°, для формирования вращающегося поля не нужны дополнительные элементы и преобразования. Вращение поля внутри статора и, как следствие, вращение ротора обусловлены самой конструкцией асинхронного двигателя. Достаточно обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет работать.
Эксплуатация. Затраты на эксплуатацию асинхронного электродвигателя крайне малы, а обслуживание не представляет никаких сложностей. Нужно лишь время от время проводить чистку от пыли и по необходимости протягивать контакты подключения. При правильной установке и эксплуатации двигателя замена подшипников производится раз в 15-20 лет.
Затраты на эксплуатацию асинхронного электродвигателя крайне малы, а обслуживание не представляет никаких сложностей. Нужно лишь время от время проводить чистку от пыли и по необходимости протягивать контакты подключения. При правильной установке и эксплуатации двигателя замена подшипников производится раз в 15-20 лет.
Недостатки асинхронных двигателей
Скорость вращения ротора. Скорость вращения вала двигателя зависит от частоты питающей сети (стандартные значения в промышленности – 50 и 60 Гц) и от количества полюсов обмоток статора.
Это можно считать недостатком в том случае, когда необходимо в процессе работы менять скорость вращения. Для решения данной проблемы были разработаны многоскоростные асинхронные двигатели, у которых имеется возможность переключения обмоток.
Кроме того, в современном оборудовании управление скоростью реализуется за счет преобразователей частоты.
Скольжение. Эффект скольжения проявляется в том, что частота вращения ротора всегда будет меньше частоты вращения поля внутри статора. Это заложено в принцип работы асинхронного двигателя и отражено в его названии. Скольжение также зависит от механической нагрузки на валу.
Эффект скольжения проявляется в том, что частота вращения ротора всегда будет меньше частоты вращения поля внутри статора. Это заложено в принцип работы асинхронного двигателя и отражено в его названии. Скольжение также зависит от механической нагрузки на валу.
При необходимости скольжение можно скомпенсировать, а скорость вращения сделать независимой от нагрузки при помощи преобразователя частоты.
Величина напряжения питания. В сырых и влажных помещениях, где действуют повышенные требования к электробезопасности, применение асинхронного электродвигателя может быть невозможным. Дело в том, что из-за конструктивных особенностей такие двигатели практически не производятся на напряжение питания менее 220 В. В таких случаях применяют приводы постоянного тока, рассчитанные на напряжение 48 В и менее, либо используют гидравлические или пневматические приводы.
Чувствительность к напряжению питания. При отклонении напряжения питания более чем на 5% параметры двигателя могут отличаться от номинальных, а сам агрегат может перегреваться.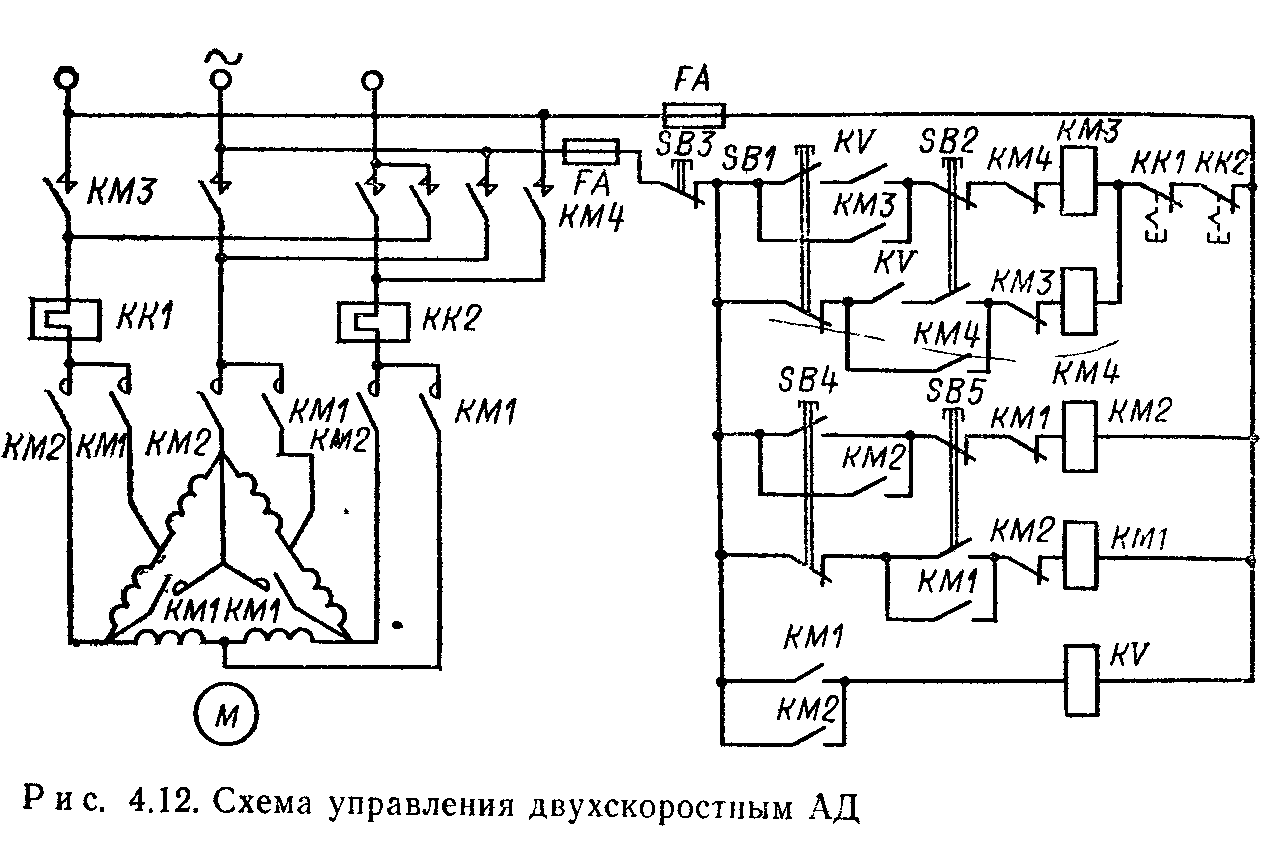 Кроме того, при понижении напряжения падает момент электродвигателя, который квадратически зависит от напряжения.
Кроме того, при понижении напряжения падает момент электродвигателя, который квадратически зависит от напряжения.
При использовании преобразователя частоты скорость вращения меняется путем изменения величины и частоты питающего напряжения. Принципиально, что отношение напряжения к частоте должно быть константой.
Пусковой ток. Большой пусковой ток – проблема асинхронных двигателей мощностью более 10 кВт. При пуске ток может превышать номинальный в 5-8 раз и длиться несколько секунд. Из-за этого негативного эффекта мощные двигатели нежелательно подключать напрямую.
Чаще всего для понижения пускового тока применяют схему «Звезда-Треугольник», устройства плавного пуска и преобразователи частоты. Также можно использовать асинхронные двигатели с фазным ротором.
Пусковой момент. В силу электрических и механических переходных процессов в момент пуска двигатель обладает крайне низким КПД и большой реактивностью.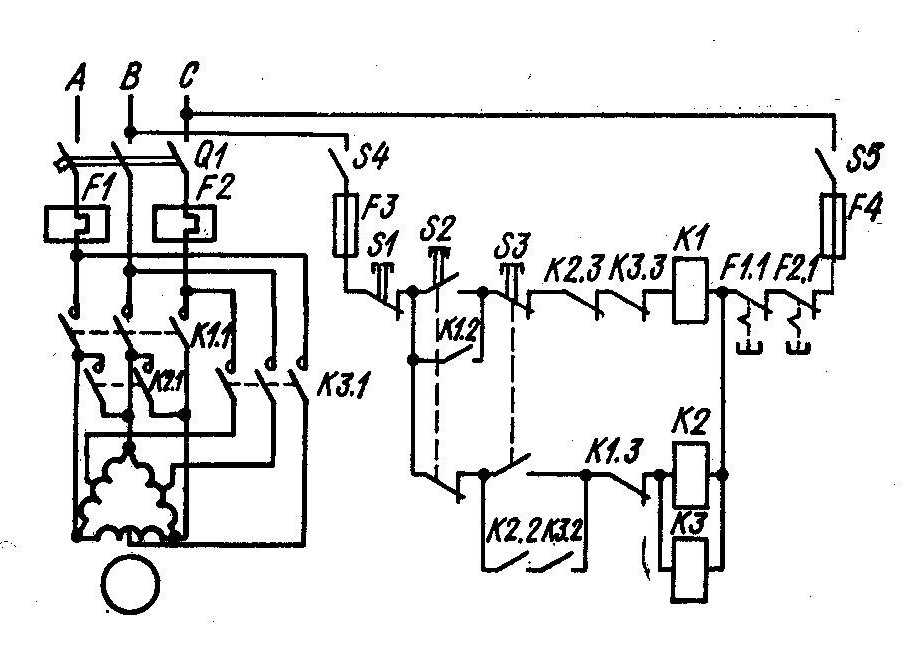 Из-за низкого пускового момента привод может не справиться с началом вращения тяжелых механизмов. Этот же недостаток приводит к нагреву двигателя при пуске. Отсюда возникает другая проблема – ограничение количества пусков в единицу времени.
Из-за низкого пускового момента привод может не справиться с началом вращения тяжелых механизмов. Этот же недостаток приводит к нагреву двигателя при пуске. Отсюда возникает другая проблема – ограничение количества пусков в единицу времени.
При использовании частотного преобразователя момент при пуске и на низких частотах может быть увеличен за счет повышения напряжения.
Вывод
Плюсы асинхронных двигателей значительно перевешивают минусы. В большинстве случаев недостатки компенсируются путем применения преобразователей частоты и других устройств пуска.
Другие полезные материалы:
Способы защиты электродвигателей
Когда не нужен плавный пуск
Когда нецелесообразно ремонтировать двигатель
подключение на 220 вольт, советы и рекомендации
Автор Aluarius На чтение 5 мин. Просмотров 2.8k. Опубликовано
Бытовых ситуаций много, особенно у тех, кто проживает в своем собственном частном доме. К примеру, необходимо установить в гараже точильный станок с асинхронным электродвигателем, который работает от трехфазной сети переменного тока. А на участок проведена лишь однофазная сеть на 220 В. Что делать? В принципе, это не проблема, потому что любой трехфазный электрический движок можно подключить и к однофазной сети, главное знать, как это сделать. Итак, наша задача в этой статье разобраться в позиции – асинхронный двигатель подключение на 220 вольт.
Существуют две классические схемы такого подключения, в которых присутствуют конденсаторы. То есть, сам электродвигатель становится не асинхронным, а конденсаторным. Вот эти схемы:
Конечно, это не единственные варианты, но в этой статье будем говорить именно о них, как о самых простых и часто используемых.
На схемах хорошо видно, что в них установлены конденсаторы: рабочий и пусковой, которые в свою очередь называются фазосдвигающими. А так как в данной схеме эти элементы являются основными, то самый важный момент – это правильно подобрать конденсатор по емкости, которая бы соответствовала мощности мотора.
А так как в данной схеме эти элементы являются основными, то самый важный момент – это правильно подобрать конденсатор по емкости, которая бы соответствовала мощности мотора.
Выбираем конденсаторы
Существует формула, по которой емкость можно рассчитать. Правда, для схемы звезда и треугольника она отличается коэффициентом. Для схемы звезда формула вот такая:
С=2800*I/U, где I – это ток, который можно замерить в питающем проводе клещами, U – это напряжение однофазной сети – 220 В.
Формула для треугольника:
С=4800*I/U.
Здесь загвоздка может быть только в определение силы тока, просто клещей может не оказаться под рукой, поэтому предлагаем упрощенный вариант формулы:
С=66*Р, где Р – это мощность электродвигателя, которая наносится на шильдик мотора или в его паспорте. По сути, получается так, что емкость рабочего конденсатора в размере 7 мкФ должно хватить на 0,1 кВт мощности двигателя. Обычно электрики берут именно это соотношение, когда перед ними ставиться вопрос, как подключить асинхронный двигатель с 380 на 220 В. И еще один момент – конденсатор контролирует силу тока, поэтому так важно правильно подобрать его емкость. И самое главное в подключении двигателя добиться того, чтобы значение тока при эксплуатации электродвигателя не поднималось выше номинальной величины.
По сути, получается так, что емкость рабочего конденсатора в размере 7 мкФ должно хватить на 0,1 кВт мощности двигателя. Обычно электрики берут именно это соотношение, когда перед ними ставиться вопрос, как подключить асинхронный двигатель с 380 на 220 В. И еще один момент – конденсатор контролирует силу тока, поэтому так важно правильно подобрать его емкость. И самое главное в подключении двигателя добиться того, чтобы значение тока при эксплуатации электродвигателя не поднималось выше номинальной величины.
Что касается пускового конденсатора, то его обязательно устанавливают в схему, если при пуске мотора действует хотя бы минимальная нагрузка. Включается он обычно буквально на пару секунд, пока ротор не наберет свои обороты. После чего он просто отключается. Если по каким-то причинам пусковой конденсатор не отключится, то произойдет перекос фаз, и двигатель перегреется.
Внимание! Так как в процессе пуска, тем более под нагрузкой, величина тока сильно возрастает, то и емкость пускового конденсатора должна быть раза в три больше конденсатора рабочего.

Есть еще один показатель, на который необходимо обратить внимание при выборе. Это напряжение. Правило здесь одно: напряжение конденсатора должно быть больше напряжения в однофазной сети на 1,5.
Тип конденсаторов
Специалисты рекомендуют в качестве пускового и рабочего конденсаторов использовать одинаковые модели. Самый простой вариант – это бумажные конструкции в герметичном металлическом корпусе. Правда, есть у них один существенный недостаток – большие габаритные размеры. Поэтому если перед вами стоит вопрос, как подключить небольшой мощности двигатель 380 на 220 вольт, то количество таких конденсаторов будет приличным, и вся конструкция будет смотреться не очень.
Можно использовать для этих целей электролитические приборы, но их схема подключения отличается от предыдущей, потому что в нее придется установить резисторы и диоды. К тому же эти конденсаторы при пробое взрываются. Есть более современные виды – это полипропиленовые модели металлизированного типа. Себя они зарекомендовали хорошо, претензий к ним сейчас у специалистов нет.
Себя они зарекомендовали хорошо, претензий к ним сейчас у специалистов нет.
Полезные советы
- Обращаем ваше внимание на тот факт, что при подключении трехфазного двигателя к однофазной сети можно говорить и снижении мощности электрического агрегата. В общем, его фактический показатель не будет превышать номинальный 70-80%. При этом скорость вращения ротора не уменьшится.
- Если используемый движок имеет схему переключения 380/220, это обязательно указывается на шильдике, то в однофазную сеть его надо подключать только треугольником.
- В том случае, если на шильдике указаны схема подключения звездой и только трехфазное подключение на 380 вольт, то вам придется вскрыть клеммную коробку и добраться до соединения концов обмоток двигателя. Потому что внутри агрегата уже установлена схема звезда, ее-то и придется разобрать и вывести наружу шесть концов обмотки статора.
Установка реверса
Иногда возникает необходимость провести подключение так, чтобы трехфазный двигатель, подсоединенный к однофазной сети, вращался то в одну, то в другую стороны. Для этого необходимо установить в схему любой управляющий прибор. Это может быть тумблер, кнопка или ключи управление. Но здесь есть два основных требования:
Для этого необходимо установить в схему любой управляющий прибор. Это может быть тумблер, кнопка или ключи управление. Но здесь есть два основных требования:
- Обращайте внимание на силу тока, которую этот управляющий прибор может выдержать. Чтобы он был больше нагрузки, создаваемой электродвигателем.
- В конструкции управляющего прибора должно быть две пары контактов: нормально замкнутые и нормально разомкнутые.
Вот схема, по которой подключается этот элемент в питание электродвигателя:
Здесь видно, что реверс осуществляется подачей электроэнергии на разные полюса конденсаторов.
Заключение по теме
Схема трехфазного асинхронного двигателя с подключением к 220 вольт – дело реальное. Проблем с ним быть не должно. Здесь главное, и это было показано в статье, правильно подобрать конденсаторы (рабочие и пусковые) и правильно выбрать схему подключения. Особое внимание придется уделить правилам соединения, где в основе будет лежать сам двигатель, а, точнее, его возможности.
Подбор электродвигателя по параметрам
Подбор электродвигателя по параметрам
Асинхронный двигатель это важный и незаменимый компонент любого производства. Имеет множество модификаций, режимов работы, степеней защиты, монтажных исполнений, климатического исполнения и других параметров. А зарубежный производитель может назвать модель своего электродвигателя определенным образом, присущим только ему. Более того есть производители реализующие свою промышленную технику с электромоторами своего же производства, а отдельно свои двигатели массово не реализующие. В таких ситуациях, когда электродвигатели в составе этого оборудования выходят из строя, остро встает вопрос подбора аналога. Причем подбор и замена электродвигателя становится приоритетной задачей, поскольку с неисправным электромотором не может функционировать целое производство, и простои оборачиваются внушительными экономическими потерями. Поставка оригинала вышедшего из строя мотора в подобных ситуациях может занимать до полугода и можно понять потребителя, который судорожно пытается найти решение этой проблемы. А подобрать аналог бывает трудно исходя из многообразия промышленной приводной техники, существующей в современном мире.
А подобрать аналог бывает трудно исходя из многообразия промышленной приводной техники, существующей в современном мире.
Определение электродвигателя
В начале определите серию и производителя. К примеру, для моторов отечественно производства устаревших серий А2, АО2, АО, АОЛ, АОС, АОС2 в настоящее время не существует полных аналогов. В такой ситуации нужно подбирать электродвигатели АИР и смотреть максимально приближенные установочные размеры, а так же значения киловатт и оборотов в минуту. Серии импортных моторов мы перечислять не будем, их великое множество. После определения серии нужно определить трехфазный это электродвигатель или однофазный: однофазная сеть 220V, трехфазная 380V. Далее смотрим значение мощности электродвигателя, количество оборотов, а так же высоту до центра его вала. К примеру, значение 3 kW(3кВт) будет означать мощность электромотора соответственно три киловатта, значение 1500 об/мин, что его вал вращается с частотой 1500 оборотов в минуту, а цифра 100 будет означать высоту от лап до центра его вала (более подробно о расшифровке маркировки читайте в этой статье). При этом смотрим частоту сети, в большинстве случаев асинхронные моторы работают при частоте 50 Гц.
При этом смотрим частоту сети, в большинстве случаев асинхронные моторы работают при частоте 50 Гц.
Однако при работе с частотой 60 Гц такой электродвигатель будет в состоянии выдавать мощность выше, и количество оборотов может быть так же увеличено. Эти параметры так же могут быть отражены на шильде электромотора. В такой ситуации можно принять такой электродвигатель за двухскоростной, однако это не так. После того как разобрались со значением мощности, оборотами и частотой сети, посмотрим режим работы (значение S на шильде). О режимах работы электродвигателей читайте в этой статье. Далее смотрим подключение электродвигателя, к примеру, 220/380В будет означать, что электродвигатель можно подключать треугольником к сети напряжением 220В и звездой к сети 380В соответственно. После этого определяем степень защиты IP и климатическое исполнение, об этом можете прочесть здесь. Так же важно определить наличие или отсутствие электромагнитного тормоза в системе, об этом внизу шильдика может говорить изображение диодного моста, значение напряжение тормоза и значение тормозного момента Nm. А так же смотрим, какой у мотора класс изоляции, буквы F или H в большинстве случаев, при этом более распространен класс изоляции F (до 155ºС). После определения всех этих параметров смотрим монтажное исполнение электродвигателя.
А так же смотрим, какой у мотора класс изоляции, буквы F или H в большинстве случаев, при этом более распространен класс изоляции F (до 155ºС). После определения всех этих параметров смотрим монтажное исполнение электродвигателя.
В итоге у нас есть все параметры электродвигателя, и мы можем перейти к определению установочного стандарта. В настоящее время их два: ГОСТ и DIN/CENELEC, ГОСТ это российский стандарт электродвигателей АИР, а DIN/CENELEC европейский электродвигателей АИС. Их различие это привязка мощностей агрегата к его установочным размерам. Таблицу привязок мощностей к установочным размерам электродвигателей АИР Вы можете скачать по этому адресу, а таблицу сравнений размеров стандарта ГОСТ, к стандарту DIN/CENELEC по этому. Так же Вы можете определить какого стандарта электродвигатель перед вами, зная только его мощность, количество оборотов и высоту станины, посмотрев каталог ГОСТ и DIN соответственно.
После всего вышеизложенного желательно дополнительно сверить размеры вашего двигателя с выбранным аналогом.
В случае возникновения трудностей Вы можете обратиться за помощью к нашим специалистам.
Электродвигатель АИР характеристики
| Тип двигателя | Р, кВт | Номинальная частота вращения, об/мин | кпд,* | COS ф | 1п/1н | Мп/Мн | Мmах/Мн | 1н, А | Масса, кг |
| Купить АИР56А2 | 0,18 | 2840 | 68,0 | 0,78 | 5,0 | 2,2 | 2,2 | 0,52 | 3,4 |
| Купить АИР56В2 | 0,25 | 2840 | 68,0 | 0,698 | 5,0 | 2,2 | 2,2 | 0,52 | 3,9 |
| Купить АИР56А4 | 0,12 | 1390 | 63,0 | 0,66 | 5,0 | 2,1 | 2,2 | 0,44 | 3,4 |
| Купить АИР56В4 | 0,18 | 1390 | 64,0 | 0,68 | 5,0 | 2,1 | 2,2 | 0,65 | 3,9 |
| Купить АИР63А2 | 0,37 | 2840 | 72,0 | 0,86 | 5,0 | 2,2 | 2,2 | 0,91 | 4,7 |
| Купить АИР63В2 | 0,55 | 2840 | 75,0 | 0,85 | 5,0 | 2,2 | 2,3 | 1,31 | 5,5 |
| Купить АИР63А4 | 0,25 | 1390 | 68,0 | 0,67 | 5,0 | 2,1 | 2,2 | 0,83 | 4,7 |
| Купить АИР63В4 | 0,37 | 1390 | 68,0 | 0,7 | 5,0 | 2,1 | 2,2 | 1,18 | 5,6 |
| Купить АИР63А6 | 0,18 | 880 | 56,0 | 0,62 | 4,0 | 1,9 | 2 | 0,79 | 4,6 |
| Купить АИР63В6 | 0,25 | 880 | 59,0 | 0,62 | 4,0 | 1,9 | 2 | 1,04 | 5,4 |
| Купить АИР71А2 | 0,75 | 2840 | 75,0 | 0,83 | 6,1 | 2,2 | 2,3 | 1,77 | 8,7 |
| Купить АИР71В2 | 1,1 | 2840 | 76,2 | 0,84 | 6,9 | 2,2 | 2,3 | 2,6 | 10,5 |
| Купить АИР71А4 | 0,55 | 1390 | 71,0 | 0,75 | 5,2 | 2,4 | 2,3 | 1,57 | 8,4 |
| Купить АИР71В4 | 0,75 | 1390 | 73,0 | 0,76 | 6,0 | 2,3 | 2,3 | 2,05 | 10 |
| Купить АИР71А6 | 0,37 | 880 | 62,0 | 0,70 | 4,7 | 1,9 | 2,0 | 1,3 | 8,4 |
| Купить АИР71В6 | 0,55 | 880 | 65,0 | 0,72 | 4,7 | 1,9 | 2,1 | 1,8 | 10 |
| Купить АИР71А8 | 0,25 | 645 | 54,0 | 0,61 | 4,7 | 1,8 | 1,9 | 1,1 | 9 |
| Купить АИР71В8 | 0,25 | 645 | 54,0 | 0,61 | 4,7 | 1,8 | 1,9 | 1,1 | 9 |
| Купить АИР80А2 | 1,5 | 2850 | 78,5 | 0,84 | 7,0 | 2,2 | 2,3 | 3,46 | 13 |
| Купить АИР80А2ЖУ2 | 1,5 | 2850 | 78,5 | 0,84 | 7,0 | 2,2 | 2,3 | 3,46 | 13 |
| Купить АИР80В2 | 2,2 | 2855 | 81,0 | 0,85 | 7,0 | 2,2 | 2,3 | 4,85 | 15 |
| Купить АИР80В2ЖУ2 | 2,2 | 2855 | 81,0 | 0,85 | 7,0 | 2,2 | 2,3 | 4,85 | 15 |
| Купить АИР80А4 | 1,1 | 1390 | 76,2 | 0,77 | 6,0 | 2,3 | 2,3 | 2,85 | 14 |
| Купить АИР80В4 | 1,5 | 1400 | 78,5 | 0,78 | 6,0 | 2,3 | 2,3 | 3,72 | 16 |
| Купить АИР80А6 | 0,75 | 905 | 69,0 | 0,72 | 5,3 | 2,0 | 2,1 | 2,3 | 14 |
| Купить АИР80В6 | 1,1 | 905 | 72,0 | 0,73 | 5,5 | 2,0 | 2,1 | 3,2 | 16 |
| Купить АИР80А8 | 0,37 | 675 | 62,0 | 0,61 | 4,0 | 1,8 | 1,9 | 1,49 | 15 |
| Купить АИР80В8 | 0,55 | 680 | 63,0 | 0,61 | 4,0 | 1,8 | 2,0 | 2,17 | 18 |
| Купить АИР90L2 | 3,0 | 2860 | 82,6 | 0,87 | 7,5 | 2,2 | 2,3 | 6,34 | 17 |
| Купить АИР90L2ЖУ2 | 3,0 | 2860 | 82,6 | 0,87 | 7,5 | 2,2 | 2,3 | 6,34 | 17 |
| Купить АИР90L4 | 2,2 | 1410 | 80,0 | 0,81 | 7,0 | 2, |
Объяснение скорости двигателя
: погружение в двигатели переменного и постоянного тока
Скорость, крутящий момент, мощность и напряжение являются важными факторами при выборе двигателя. В этом блоге, состоящем из двух частей, мы углубимся в особенности скорости двигателя. В Части 1 мы обсудим, как скорость различается между типами двигателей, а в Части 2 мы рассмотрим, когда рассматривать возможность добавления коробки передач в приложение.
В этом блоге, состоящем из двух частей, мы углубимся в особенности скорости двигателя. В Части 1 мы обсудим, как скорость различается между типами двигателей, а в Части 2 мы рассмотрим, когда рассматривать возможность добавления коробки передач в приложение.
Скорость асинхронного двигателя переменного тока
Электродвигатели переменного тока
уникальны тем, что созданы для работы на определенных скоростях независимо от их конструкции или производителя.Скорость двигателя переменного тока зависит от количества полюсов и частоты сети источника питания, а не от его напряжения. Обычные двигатели переменного тока состоят из двух или четырех полюсов. В полюсах статора создается магнитное поле, которое индуцирует результирующие магнитные поля в роторе, которые соответствуют частоте изменяющегося магнитного поля в статоре. Двухполюсные двигатели переменного тока, работающие с частотой 60 Гц, всегда будут работать со скоростью примерно 3600 об / мин, а четырехполюсные двигатели переменного тока будут иметь скорость около 1800 об / мин.
Скорость = 120 x частота (Гц) / число полюсов двигателя
Пример 120 x 60 Гц / 4 полюса = 1800 об / мин.
Имейте в виду, что скорость двигателя переменного тока не будет достигать этих точных значений — и будет немного ниже — потому что существует определенная величина скольжения, которая должна присутствовать для двигателя для создания крутящего момента. Ротор всегда будет вращаться медленнее, чем магнитное поле статора, и постоянно играет в догонялки. Это создает крутящий момент для запуска двигателя переменного тока.Разница между синхронными скоростями статора (3600 и 1800 об / мин) и фактической рабочей скоростью называется скольжением. (Дополнительную информацию о скольжении можно найти в нашем блоге «Синхронные и асинхронные двигатели: обнаруживая разницу».)
Элемент управления может использоваться для изменения скорости трехфазного двигателя переменного тока путем увеличения или уменьшения частоты, передаваемой на двигатель, в результате чего он ускоряется или замедляется. Кроме того, многие элементы управления переменного тока имеют однофазный вход, поэтому это позволяет запускать трехфазные двигатели на объектах, где отсутствует трехфазное питание.
Кроме того, многие элементы управления переменного тока имеют однофазный вход, поэтому это позволяет запускать трехфазные двигатели на объектах, где отсутствует трехфазное питание.
Однако такая возможность изменять скорость не характерна для однофазных двигателей переменного тока. Эти двигатели подключаются непосредственно к стандартной розетке и работают с установленной доступной частотой. Исключением из этого практического правила может быть потолочный вентилятор, который работает от однофазного двигателя переменного тока, но имеет три различных настройки скорости.
Скорость двигателя постоянного тока
Хотя двигатели постоянного тока с постоянными магнитами также имеют полюса, эти полюса не влияют на скорость, как двигатели переменного тока, потому что есть несколько других факторов, влияющих на двигатели постоянного тока.Количество витков провода в якоре, рабочее напряжение двигателя и сила магнитов влияют на скорость двигателя. Если двигатель постоянного тока работает от батареи 12 В, это максимальное напряжение, доступное для устройства, и двигатель сможет работать только на скорости, рассчитанной на 12 В. Если батарея разряжена и подает меньшее напряжение, скорость соответственно уменьшится.
Если батарея разряжена и подает меньшее напряжение, скорость соответственно уменьшится.
Теперь, если вы подключите тот же двигатель 12 В постоянного тока к источнику питания 24 В постоянного тока, ваша скорость обычно удваивается. Имейте в виду, что работа двигателя с удвоенной скоростью при одной и той же точке нагрузки / крутящего момента приведет к тому, что двигатель будет работать более интенсивно, создавая дополнительный нагрев, который со временем может вызвать преждевременный отказ двигателя.
Как и в случае трехфазных двигателей переменного тока и бесщеточных двигателей постоянного тока, средства управления могут использоваться с двигателями постоянного тока. Регуляторы постоянного тока регулируют скорость, изменяя напряжение, подаваемое на двигатель (это отличается от средств управления двигателем переменного тока, которые регулируют сетевую частоту двигателя).
Типичные скорости холостого хода или синхронные скорости для двигателя переменного тока с дробной мощностью 1800 или 3600 об / мин, и от 1000 до 5000 об / мин для двигателей постоянного тока с дробной мощностью. Если приложение требует более низкой скорости и / или более высокого крутящего момента, следует рассмотреть вариант использования редукторного двигателя.Чтобы узнать больше о добавлении редуктора, ознакомьтесь с частью 2, «Объяснение скорости двигателя: когда использовать редуктор».
Если приложение требует более низкой скорости и / или более высокого крутящего момента, следует рассмотреть вариант использования редукторного двигателя.Чтобы узнать больше о добавлении редуктора, ознакомьтесь с частью 2, «Объяснение скорости двигателя: когда использовать редуктор».
Асинхронный двигатель | КСБ
Асинхронный двигатель имеет пассивный ротор, который закорочен постоянно (короткозамкнутый ротор) или временно (см. Ротор с контактным кольцом). Он может производить до нескольких мегаватт и чаще всего используется в качестве стандартного трехфазного двигателя в промышленных приложениях.
Магнитное поле в асинхронном двигателе создается током намагничивания, передаваемым через предоставленную электрическую энергию.Асинхронные двигатели характеризуются скольжением, т.е. е. зависящая от нагрузки разница между скоростью вращения ротора и скоростью вращающегося поля напряжения питания.
Ротор представляет собой металлическую клетку с осевыми стержнями, расположенными симметрично по кругу и прикрепленными к кольцу короткого замыкания (концевому кольцу) на каждом конце.
Статор состоит из распределенных катушек, которые индуцируют напряжение на стержнях ротора (см. Индукция) посредством вращающегося магнитного поля. Это приводит к сильному протеканию тока в короткозамкнутых стержнях, который создает силу между ротором и статором в магнитном поле и приводит к электромагнитному взаимодействию, ответственному за асинхронизм.Асинхронные двигатели подвержены значительным потерям в статоре и роторе.
В двигателях с контактным ротором трехфазная обмотка ротора подключается к переменным резисторам, обычно используемым в качестве жидкостных пускателей, через контактные кольца. Такая конструкция обеспечивает плавный процесс запуска, который не создает ударной нагрузки на сеть электропитания и позволяет в определенной степени изменять скорость. Однако это также приводит к значительным потерям мощности.
Обмотки ротора с короткозамкнутым ротором обычно состоят из одно- или двухпроводных шин, закороченных на концах кольцевым проводом.Роторы с короткозамкнутым ротором очень просты по конструкции, надежны и не требуют обслуживания. См. Рис.1 Асинхронный двигатель
См. Рис.1 Асинхронный двигатель
Рис.1 Асинхронный двигатель: асинхронный двигатель в разрезе
В отношении контакта с водой различают двигатели с сухим ротором, погружные двигатели и двигатели с мокрым ротором. См. Рис.2 Асинхронный двигатель
| Внутреннее смачивание | Внешнее смачивание | ||
|---|---|---|---|
| Ротор | Обмотка | Сухой корпус | Мокрый корпус (погружной двигатель) |
| Сухой | Сухой | Сухой двигатель (с защитой от проникновения воды или без нее) | Сухой (заполненный воздухом) погружной двигатель |
| Влажный (двигатель с мокрым ротором) | Сухой (герметичный двигатель) | Двигатель с мокрым ротором насоса с мокрым ротором | Полностью погружной двигатель (заполненный жидкостью) |
Рис. 2 Асинхронный двигатель: Обозначение асинхронных двигателей в зависимости от влажности
2 Асинхронный двигатель: Обозначение асинхронных двигателей в зависимости от влажности
Сухой двигатель имеет разные типы защиты от проникновения воды (см. Тип защиты).
Погружной двигатель частично или полностью погружен в воду и обычно устанавливается в вертикальном положении. Тепло, вырабатываемое двигателем, передается непосредственно окружающей обрабатываемой жидкости. Его отличительной особенностью является корпус двигателя, который смачивается снаружи (см. Погружной электронасос).Внутреннее смачивание и глубина погружения отличают погружные двигатели с масляным или воздушным наполнением для малых и средних глубин погружения (погружные насосы для сточных вод) от полностью погружных двигателей.
См. Рис. 3, 4 Насос для сточных вод
Полностью погружные двигатели смачиваются жидкостью, находящейся внутри и снаружи. Они рассчитаны на любую глубину погружения и, прежде всего, используются в скважинах (см. Погружные скважинные насосы), поэтому они имеют небольшой диаметр и относительно длинные. Полностью погружные двигатели могут быть оснащены мокрой обмоткой статора (включая водонепроницаемую пластиковую изоляцию) или, в сочетании с корпусом, сухой обмоткой (см. Герметичный моторный насос).
Полностью погружные двигатели могут быть оснащены мокрой обмоткой статора (включая водонепроницаемую пластиковую изоляцию) или, в сочетании с корпусом, сухой обмоткой (см. Герметичный моторный насос).
Двигатель с мокрым ротором заполнен жидкостью и, в отличие от погружного двигателя, его корпус не смачивается снаружи. Он имеет подшипники с жидкостной смазкой (см. Подшипники скольжения) и образует герметичный насосный агрегат (насос с мокрым ротором) вместе с насосом. Двигатель может быть оборудован мокрой обмоткой статора или, в сочетании с баком, сухой обмоткой, и часто является предпочтительным двигателем для циркуляционных насосов.
Имитация управления двигателем с переменной скоростью
— MATLAB и Simulink
— MathWorks 中国
Моделирование управления двигателем с переменной скоростью
Управление с переменной скоростью электрических машин переменного тока использует электронику с принудительной коммутацией.
переключатели, такие как IGBT, MOSFET и GTO. Асинхронные машины, запитанные с шириной импульса
Асинхронные машины, запитанные с шириной импульса
модуляция (PWM) преобразователи напряжения (VSC) в настоящее время постепенно
замена двигателей постоянного тока и тиристорных мостов. С ШИМ в сочетании с современным управлением
такие методы, как управление по полю или прямое управление крутящим моментом, вы можете получить то же самое
гибкость в управлении скоростью и крутящим моментом, как в машинах постоянного тока.В этом руководстве показано, как построить
простой привод переменного тока без обратной связи, управляющий асинхронной машиной. Simscape ™
Electric ™ Specialized Power Systems содержит библиотеку готовых моделей, которые позволяют вам
для моделирования систем электроприводов без необходимости самостоятельно строить эти сложные системы.
Дополнительные сведения об этой библиотеке см. В разделе «Библиотека электрических приводов».
Библиотека>>>> содержит четыре наиболее часто используемых трехфазных машины: упрощенная
и комплектные синхронные машины, асинхронные машины и синхронные машины с постоянными магнитами
машина. Каждая машина может использоваться в генераторном или моторном режиме. В сочетании с линейными и
Каждая машина может использоваться в генераторном или моторном режиме. В сочетании с линейными и
нелинейные элементы, такие как трансформаторы, линии, нагрузки, выключатели и т. д., они могут быть использованы для
моделировать электромеханические переходные процессы в электрической сети. Их также можно комбинировать с
силовые электронные устройства для моделирования приводов.
Библиотека>>>> содержит блоки, позволяющие моделировать диоды, тиристоры, ГТО.
тиристоры, полевые МОП-транзисторы и устройства IGBT. Вы можете соединить несколько блоков вместе, чтобы построить
трехфазный мост.Например, для инверторного моста IGBT потребуется шесть IGBT и шесть
антипараллельные диоды.
Чтобы облегчить реализацию мостов, блок Universal Bridge автоматически выполняет эти соединения для
вы.
Построение и моделирование двигателя с ШИМ-управлением
Выполните следующие действия, чтобы построить модель двигателя с ШИМ-управлением.
Сборка и настройка модели
Введите
power_newв командной строке, чтобы открыть
новая модель.Сохраните модель какpower_PWMmotorДобавьте блок Universal Bridge из>>>> библиотеки
В параметрах Настройки для
Универсальный мостиковый блок, набор Power Electronic
параметр устройства кIGBT / диоды.Добавить блок единиц СИ для асинхронной машины
из>>>> библиотекиУстановите параметры блока Asynchronous Machine SI Units как
следует.Настройки Параметр Значение Конфигурация Тип ротора Squirrel-cage61900 Параметры
Номинальная мощность, напряжение (линейное) и частота [Pn (ВА),
Vn (Vrms), fn (Hz)][3 * 746 220 60]Сопротивление и индуктивность статора [Rs (Ом) Lls (H)
][1. 2) F (Н.м.с) p ()
][0,02 0,005752 2][скольжение, th (град.), Ia, ib, ic (A), pha, phb,
phc (градусы)][1 0 0 0 0 0 0 0]Установка номинальной мощности на
3 * 746ВА и номинальной
линейное напряжение Vn до220Vrms реализует 3 л.с., 60 Гц
машина с двумя парами полюсов.Поэтому номинальная скорость немного ниже, чем
синхронная частота вращения 1800 об / мин, или Вт с =
188,5 рад / с.Установка параметра Тип ротора на
Беличья клетка, скрывает выходные порты,
a , b и c , потому что
эти три клеммы ротора обычно замкнуты накоротко для нормального двигателя.
операция.Доступ к внутренним сигналам блока Asynchronous Machine:
Добавьте блок Bus Selector из библиотеки>.
Подключите выходной порт измерения, м , машины
блок к входному порту блока Bus Selector.Откройте диалоговое окно Block Parameters для шины
Блок селектора. Дважды щелкните блок.Удалить предварительно выбранные сигналы. В Selected
элементы панель, Shift выбрать???и
signal1??? signal2, затем щелкните
Удалить .Выберите интересующие сигналы:
На левой панели диалогового окна выберите>. Щелкните Выберите >> .
Выбрать>. Щелкните Выберите >> .
Выбрать.
Щелкните Выберите >> .
 2) F (Н.м.с) p ()
2) F (Н.м.с) p ()

Загрузка и привод двигателя
Реализуйте характеристику крутящего момента-скорости нагрузки двигателя.Предполагая квадратичный крутящий момент-скорость
характеристика (нагрузка вентилятора или насоса)., крутящий момент T пропорционален
в квадрат скорости ω.
Номинальный крутящий момент двигателя равен
Следовательно, постоянная k должна быть
Добавьте интерпретируемый функциональный блок MATLAB из
библиотека>. Дважды щелкните функциональный блок и введите выражение для
крутящий момент как функция скорости:3.2.Подключите выход функционального блока к входу крутящего момента.
порт, Тм , станочного блока.Добавьте блок источника напряжения постоянного тока из библиотеки>>>>. В настройках Parameters для блока,
для параметра Амплитуда (В) укажите
400.Измените имя блока измерения напряжения на
ВАБ.Добавьте блок Ground из библиотеки>>>>. Подключите силовые элементы и блоки датчиков напряжения, как показано на рисунке.
на схеме двигателяpower_PWM
модель.

Управление мостом инвертора с помощью генератора импульсов
Для управления мостом инвертора используйте генератор импульсов.
Добавьте блок генератора ШИМ (2 уровня) из библиотеки>>>>. Вы можете настроить преобразователь для работы в разомкнутом контуре, и
три модулирующих сигнала ШИМ генерируются внутри.Подключите выход P к
вход импульсов блока Universal BridgeОткройте блок PWM Generator (2-Level)
диалоговое окно и установите следующие параметры.Тип генератора
Трехфазный мост (6 импульсов)Режим работы
0 Несинхронизированный
370 Частота
18 * 60 Гц (1080 Гц)Начальная фаза
0 градусов03
Минимальное и максимальное значения 970
[-1,1]методика отбора проб
Природные
внутренней генерации опорного сигнала
выбран
Индекс модуляции 90 012
0. 9 Опорный сигнал частота
60 ГцОпорный сигнал фаза
0 градусов0 Время выборки
10e-6 сБлок был дискретизирован, поэтому
импульсы изменяются кратно указанному временному шагу.Время
шаг 10 мкс соответствует +/- 0,54% периода переключения
при 1080 Гц.Один из распространенных методов генерации импульсов ШИМ использует сравнение
синтезируемого выходного напряжения (в данном случае 60 Гц) с треугольным
волна на частоте переключения (в данном случае 1080 Гц). Линия к строке
Выходное среднеквадратичное напряжение является функцией входного напряжения постоянного тока и
индекс модуляции м по формуле
уравнение:Следовательно, постоянное напряжение 400 В и коэффициент модуляции
0. 90 дает выходное линейное напряжение 220 В (среднеквадр.), Которое является
номинальное напряжение асинхронного двигателя.
 9
9  90 дает выходное линейное напряжение 220 В (среднеквадр.), Которое является
90 дает выходное линейное напряжение 220 В (среднеквадр.), Которое являетсяОтображение сигналов и измерение основного напряжения и тока
Теперь вы добавляете блоки, измеряющие основную составляющую (60 Гц)
встроены в прерванное напряжение Vab и в ток фазы A. Добавьте в модель блок Фурье из библиотеки>>>>.Откройте диалоговое окно блока Фурье и убедитесь, что параметры установлены как
следует:Фундаментальный
частота60 ГцГармоника n
1Начальный ввод
[0 0 0 0137]Время выборки
10e-6 сПодключите этот блок к выходу датчика напряжения Vab.
Дублируйте блок Фурье. Измерять
ток фазы А, вы подключаете этот блок к статору
текущий выход is_a блока выбора шины.Передать эти сигналы в симуляцию
Инспектор данных: сигналы Te, ias и w измерительного выхода
блока Asynchronous Machine и напряжения VAB.

Моделирование привода с ШИМ-двигателем с помощью алгоритма непрерывной интеграции
Установите время остановки на 1 с и запустите моделирование.Откройте Simulation Data Inspector и посмотрите
сигналы.
Двигатель запускается и достигает установившейся скорости 181 рад / с.
(1728 об / мин) через 0,5 с. При запуске величина тока 60 Гц
достигает пика 90 А (64 А RMS), тогда как его установившееся значение составляет 10,5
A (7,4 A RMS). Как и ожидалось, величина напряжения 60 Гц содержала
в рубленой волне остается на уровне
Также обратите внимание на сильные колебания электромагнитного момента
при запуске. Если вы увеличите крутящий момент в устойчивом состоянии, вы должны
Если вы увеличите крутящий момент в устойчивом состоянии, вы должны
наблюдают зашумленный сигнал со средним значением 11.9 Н-м, соответствующий
к моменту нагрузки при номинальной скорости.
Если вы увеличите масштаб трех токов двигателя, вы увидите, что
все гармоники (кратные частоте переключения 1080 Гц)
фильтруется индуктивностью статора, так что составляющая 60 Гц
доминирующий.
ШИМ-привод двигателя; Результаты моделирования для двигателя
Запуск при полном напряжении
Использование блока мультиметра
Блок универсального моста не является обычной подсистемой, в которой
доступны все шесть отдельных переключателей.Если вы хотите измерить
переключателя напряжений и токов необходимо использовать блок мультиметра, который дает доступ к
внутренние сигналы моста:
Откройте Universal
Диалоговое окно Bridge и установите параметр Measurement
кУстройство токов.Добавьте блок мультиметра из>>>> библиотеки.
Дважды щелкните блок мультиметра. Окно с шестью переключателями
токи появляются.Выберите два тока моста
рука подключена к фазе А.Они обозначены какiSw1
Универсальный мостiSw2
Универсальный мост3
0
Универсальный мост03
0 11 900
Количество сигналов (2) отображается на значке мультиметра.Отправить сигнал от блока мультиметра
в Инспектор данных моделирования.Перезапустите моделирование. Формы волны
полученные для первых 20 мс показаны на этом графике.Токи в переключателях 1 и 2 IGBT / диодах
Как и ожидалось, токи в переключателях 1 и 2 дополняют друг друга.
Положительный ток указывает на ток, протекающий в IGBT, тогда как
отрицательный ток указывает на ток в антипараллельном диоде.Примечание
Использование блока мультиметра не ограничивается универсальным мостом
блок.Многие блоки библиотек электрических источников и элементов
есть параметр измерения, в котором вы можете выбрать напряжения, токи,
или насыщаемые потоки трансформатора. Разумное использование мультиметра
блок уменьшает количество датчиков тока и напряжения в вашей цепи,
упрощая отслеживание.Дискретизация привода двигателя ШИМ
Вы могли заметить, что моделирование с использованием переменного шага
алгоритм интеграции относительно длинный. В зависимости от вашего компьютера,
имитация одной секунды может занять десятки секунд.Чтобы сократить
время моделирования, вы можете дискретизировать свою схему и моделировать при фиксированном
временные шаги моделирования.На вкладке Simulation щелкните Model Settings . Выбрать
Решатель . Под Выбор решателя выберите
с фиксированным шагомидискретный (без непрерывного
Как использовать сервоприводы с асинхронными (асинхронными) двигателями?
Учитывая высокую стоимость изготовления синхронных серводвигателей с постоянными магнитами из редкоземельных элементов, асинхронные (индукционные) двигатели, когда это возможно, более приемлемы.
Крейг Далквист • Инженер по приложениям в Lenze Americas
Один из способов получить сервоуправление асинхронным двигателем (при напряжении питания от 400 до 480 В переменного тока) - использовать обычный двигатель 230/400 или 230/460 В переменного тока (соединение треугольником / звездой).
Обычно соединение треугольником используется для 230 В переменного тока (50/60 Гц) через линию. Но с инвертором двигатель 50 Гц с напряжением питания 400 В переменного тока может управлять 230 В переменного тока при 50 Гц.
При соблюдении правильной кривой напряжение / Гц двигатель может максимизировать мощность при 87 Гц.
Крутящий момент также останется постоянным до 87 Гц, прежде чем двигатель перейдет в режим ослабления поля.
Математика для этого проста: 400/230 · 50 Гц = 87 Гц. Расчеты аналогичны для конфигурации двигателей 230/460 В переменного тока, 60 Гц. Поскольку крутящий момент остается постоянным, результирующая мощность равна номинальной мощности двигателя при 50 Гц · 1,732 (квадратный корень из 3). Номинальный ток также будет иметь коэффициент 1,732 по сравнению с номиналом 400 В перем. Тока при соединении звездой.
В результате получится мотор на 73.На 2% больше мощности при той же инерции ротора. Резольвер - наше самое распространенное устройство обратной связи. Резольвер надежен (благодаря отсутствию изнашиваемых деталей) и представляет собой однооборотное устройство абсолютного позиционирования (для обратной связи по углу положения ротора).
Сервоось, как правило, должна очень динамично ускоряться и замедляться для приложения. Иногда это возможно только с серводвигателем с постоянными магнитами. Когда асинхронный двигатель может соответствовать техническим требованиям приложения, как правило, стоимость асинхронного двигателя намного меньше, чем стоимость серводвигателя с постоянными магнитами. Другая причина использования асинхронного сервомотора или асинхронного двигателя заключается в том, чтобы воспользоваться преимуществом большей инерции ротора двигателя. Когда приложение имеет нагрузку с высокой инерцией, может потребоваться меньшее рассогласование по инерции между двигателем / мотор-редуктором и нагрузкой. Кроме того, в обмотках асинхронный двигатель предлагает очень большой диапазон ослабления поля.
Применение обмоток - основная причина, по которой Lenze предлагает двигатели с номинальной частотой значительно ниже 50 или 60 Гц.Это позволяет двигателю раньше столкнуться с ослаблением поля, чтобы лучше согласовать кривую скорость-крутящий момент приложения обмотки с двигателем.
Как и во всех конструкциях, требования к применению определяют технологические возможности двигателя. В общем, следующим шагом является определение наиболее экономичного решения для приложения. Иногда асинхронный двигатель может использоваться в приложении, которое ранее считалось приложением серводвигателя с постоянными магнитами.Или асинхронный двигатель - единственный выбор для некоторых приложений.
Lenze производит асинхронные серводвигатели более 25 лет. Двигатели специально разработаны для номинальных рабочих частот, которые намного выше или ниже 50 или 60 Гц. Асинхронные двигатели также специально разработаны для увеличения удельной мощности двигателя. Мощность двигателя варьируется от 80 Вт (0,107 л.с.) до 60 кВт (80 л.с.). Диапазон рабочих частот от 20 до 140 Гц. Двигатели, которые не находятся в диапазоне 50/60 Гц, необходимо подключать с помощью универсального инвертора или сервоусилителя.
Двигатели, отличные от 50/60 Гц, нельзя подключать напрямую к трехфазной сети 230 (0,080–0,6 кВт) или 400/480 В переменного тока.
.
 Дважды щелкните блок мультиметра. Окно с шестью переключателями
Дважды щелкните блок мультиметра. Окно с шестью переключателями