
принцип работы, виды и основное применение
Энкодер (заимствованное зарубежное слово encoder), означает преобразователь. Сегодня это название объединяет целый класс изделий, получивших широкое распространение в автоматизации промышленных процессов. В качестве устройства контроля положения выделяют две основные группы по назначению: угловые (rotary, angular) и линейные (linear encoder). В отечественной технической и конструкторской литературе чаще встречаются следующие названия: датчик обратной связи (ДОС), преобразователь угловых / линейных перемещений, датчик угла поворота (ДУП), датчик положения, шифратор, кодировщик. Также популярны названия на английском: transducer, sensor. В немецкой документации: drehgeber (если угловой), line geber (если линейный).
Объединив все эти понятия, можно сказать, что энкодером называют устройство, которое преобразовывает механическое перемещение (линейное движение или вращение) посредством изменения физических величин (проходящий свет, магнитное или индуктивное поле) в последовательность сигналов. Формируемый на выходе электрический сигнал может быть аналоговым или цифровым. Он несет в систему управления верхнего уровня информацию о величине, направлении, скорости, перемещения, положении объекта.
Формируемый на выходе электрический сигнал может быть аналоговым или цифровым. Он несет в систему управления верхнего уровня информацию о величине, направлении, скорости, перемещения, положении объекта.
Принцип работы энкодера
Как обеспечивается работа устройства лучше всего видно, если заглянуть «внутрь». Рассмотрим типовую и самую распространенную схему построения преобразователя – оптоэлектронную с подшипниковым узлом. На рисунке ниже представлен оптический многооборотный абсолютный датчик с цельным валом.
Здесь видны практически все основные узлы современного изделия:
- – вал энкодера
- – фланец (на данном рисунке представлен зажимной тип)
- – фотоприемник инфракрасного (ИК) света
- – оптический диск с растрами (метками, если инкрементный) или кодовыми дорожками (если абсолютный)
- – ИК осветитель (LED) с линзой на плате
- – механический редуктор с зубчатыми колесами (многооборотный модуль)
- – плата обработки сигнала с выходными формирователями и конверторами интерфейса.


Элементы 1, 2, 4 формируют оптико-механический подшипниковый узел. Оптический диск (лимб) 4 может быть стеклянным, металлическим, пластиковым. В зависимости от производителя бывают конструкции, где элементы 3 и 5 поменяны местами. Механический редуктор 6 встречается только у многооборотных абсолютных преобразователей.
На рисунке выше показана работа энкодера:
- ИК свет от источника 5 проходит через кодовый диск 4, и попадает на приемник (фото матрицу) 3
- Фотоприёмник имеет нанесенную на чувствительном элементе или расположенную над ним маску (индикаторную пластину), которая также имеет «окошки», как на вращающемся диске
- Из-за поочередного перекрытия и открытия окошек маски в процессе вращения вала датчика, проходящий свет имеет аналоговую структуру. Нет света -> нарастает -> максимум света -> убывает -> нет света
- Это регистрирует фото сенсор
- Далее аналоговый сигнал с приемника преобразуется платой обработки 7 в необходимые для дальнейшей передачи информации импульсы.

Виды энкодера
Основные типы, которые на слуху у всех специалистов, занимающихся автоматизацией:
- абсолютные (absolute) – всегда знают свое положение
- инкрементные (incremental) – относительные, считают только при включенном питании и вращении.
С развитием технологии, абсолютные энкодеры занимают все более прочные позиции на рынке. Если раньше соотношение было 70 на 30 и даже 80 на 20 % в пользу икнрементальных, то теперь их позиции равны. А в некоторых отраслях абсолютные преобладают.
Отдельно здесь можно выделить многооборотные энкодеры. Которые не только «запоминают» позицию внутри оборота, но и знают на каком обороте находятся. Количество оборотов зависит от используемого многооборотного модуля. У редукторного механического модуля количество регистрируемых оборотов как правило ограничено 12 (4096) или 14 битами (16384). У модуля со встроенной в энкодер батарейкой – до 18 (262144) и более бит. Многооборотный модуль, построенный на сенсорах Виганда, считает до 31 (2147483648) бит оборотов.
По конструкции выделяют угловые преобразователи следующих типов:
- С полым валом (hollow shaft):
- Сквозным (thru hollow)
- Глухим (тупиковым)(blind hollow).
- С цельным валом (solid shaft) с:
- Cинхро фланцем (synchro flange)
- Зажимным (clamping)
- Квадратным (square)
- Пилотным (pilot).
Самое полное портфолио энкодеров на рынке вы найдете на сайте f-enco.ru
Применение энкодера
Области применений сегодня настолько обширны, что преобразователь перемещений можно встретить в принтере, метро, самолете, трамвае, строительном кране, лифте, даже на продвинутом дачном участке в качестве датчика открывания ворот. Ниже представлен далеко не полный список применений, где датчики обратной связи получили наибольшее распространение:
- Автоматизация производств
- Упаковка
- Текстильное производство
- Производство продуктов питания и напитков
- Промышленные роботы
- Медицинская техника
- Томографы
- Роботы-хирурги
- Строительная и карьерная техника
- Передвижные буровые станции
- Карьерные самосвалы
- Передвижные краны
- Промышленные задвижки и регулирование уровня воды
- Радиальные и барабанные ворота
- Вертикальные шлюзы
- Автоматические трубопроводные задвижки
- Лифты
- Пассажирские
- Грузовые
- Специализированные подъемники
- Хранение и перемещение грузов
- Автоматизированные склады
- Автопогрузчики
- Портовые краны
- Багажные ленты
- Ножничные подъемники
- Альтернативная энергетика
- Ветряные генераторы
- Солнечные батареи
- Станкостроение и модернизация станков
- Универсальные станки
- Станки с ЧПУ
- Сервомоторы
Механические и оптические энкодеры
Энкодер, или преобразователь угловых перемещений, – это электромеханическое устройство, которое преобразует угловое движение вращающегося объекта (вала) в электрические сигналы, позволяющие определить его положение.
Энкодеры практически полностью заменили распространенные ранее сельсины и широко применяются во многих областях. Они входят в состав разнообразных машин, требующих точной регистрации параметров движения, таких как:
- печатные станки,
- металлообрабатывающие станки,
- лифтовая техника,
- оборудование для фасовки, упаковки и розлива,
- оптические системы (фотообъективы, телескопы),
- устройства ввода информации (мыши, трекболы),
- испытательные стенды,
- роботы и др.
Преобразователи угловых перемещений подразделяются на два типа – абсолютные энкодеры и инкрементные (относительные).
|
Тип |
Особенности |
Преимущества |
Применение |
|
Абсолютный энкодер |
|
|
В высокоточных системах (позиционирование в робототехнике, медицинской технике и т.  п.) п.)
|
|
Инкрементный энкодер |
|
|
Для задач, не требующих учета абсолютного положения объекта (контроль скорости вращения, ускорения, угла поворота) |
По принципу действия различают магнитные, магниторезисторные, механические и оптические энкодеры.
Оптические энкодеры
В данном устройстве луч света, направленный светоизлучающим диодом, прерывается вращающимся диском, расположенным между приемником и передатчиком света и жестко закрепленным на валу контролируемого объекта. Вращающийся диск имеет в конструкции специальные прорези/щели (или непрозрачные штрихи), либо вместо диска может быть лента с областями с разной отражающей способностью.
Вращающийся диск имеет в конструкции специальные прорези/щели (или непрозрачные штрихи), либо вместо диска может быть лента с областями с разной отражающей способностью.
Механические энкодеры
Механические энкодеры содержат диск из диэлектрика с нанесёнными выпуклыми, проводящими участками. Считывание абсолютного угла поворота диска производится линейкой контактов.
Ключевое преимущество оптических энкодеров – бесконтактная технология переключения, благодаря которой долговечность устройств увеличивается на порядок.
Электрическими выходными сигналами для инкрементного энкодера являются квадратурные сигналы: последовательные импульсы, сдвинутые по фазе на 90 градусов. Любое разрешение углового положения может быть выражено не в абсолютной форме, а только относительно некоторой опорной точки.
Для абсолютного энкодера вместо последовательного потока битов выводится уникальный цифровой код для каждого дискретного положения вала. Чаще всего используется код Грея, двоичное и двоично-десятичное кодирование.
Чаще всего используется код Грея, двоичное и двоично-десятичное кодирование.
ПРОЧИП представляет энкодеры фирмы Grayhill – крупнейшего американского производителя надежных компонентов для ответственных применений. В продуктовой линейке – как абсолютные, так и инкрементные энкодеры.
Принцип работы оптических энкодеров
Шкала с одной дорожкой
Шкала представляет собой единственную дорожку с контрастными линиями по всей ширине шкалы, с номинальным шагом 30 мкм. Отсутствие нескольких параллельных дорожек обеспечивает защищенность от ошибок, связанных с рысканьем, а также существенно более широкий поперечный допуск на положение головки.
Получение изображения
Изображение шкалы формируется асферической линзой, снижающей дисторсию, на детекторной матрице, специально разработанной для энкодеров RESOLUTE. Такая оптическая схема, в которой оптический путь при освещении является изломанным, а при формировании изображения – прямым, оказывается исключительно компактной и при этом работающей очень стабильно, что гарантирует высокую точность воспроизведения, столь важную для обеспечения высокого качества измерений.
Декодирование и анализ данных
После захвата изображения детектором оно передается аналогово-цифровым преобразователем (ADC) в мощный процессор цифровой обработки сигналов (DSP). Затем с помощью специально разработанных алгоритмов на основе кода, нанесенного на шкалу, получают истинное абсолютное, однако относительно грубое значение положения. После этого выполняется проверка, и вводятся поправки с помощью дополнительных алгоритмов в процессоре DSP, в которых учитывается избыточность и преднамеренно введенные ограничения кода шкалы. В других подпрограммах выполняется расчет «точного» положения с высоким разрешением, и это значение объединяется с данными по «грубому» положению, что дает в результате истинное абсолютное положение с очень высоким разрешением.
Конечные проверки и вывод данных
После выполнения заключительных процедур проверки ошибок информация загружается по соответствующему протоколу в контроллер последовательно в виде чистого слова, описывающего положение с точностью в пределах 1 нм. Защита от электрических помех обеспечивается контролем с помощью циклического избыточного кода (Cyclic Redundancy Check – CRC). Весь этот процесс занимает всего несколько микросекунд и может повторяться до 25 000 раз в секунду. С помощью различных приемов, в том числе регулировки продолжительности вспышки с учетом скорости движения оси, такие характеристики поддерживаются на скоростях до 100 м/с, и при этом, что чрезвычайно важно, сохраняется исключительно низкий уровень дрожания при позиционировании при более низких рабочих скоростях.
Защита от электрических помех обеспечивается контролем с помощью циклического избыточного кода (Cyclic Redundancy Check – CRC). Весь этот процесс занимает всего несколько микросекунд и может повторяться до 25 000 раз в секунду. С помощью различных приемов, в том числе регулировки продолжительности вспышки с учетом скорости движения оси, такие характеристики поддерживаются на скоростях до 100 м/с, и при этом, что чрезвычайно важно, сохраняется исключительно низкий уровень дрожания при позиционировании при более низких рабочих скоростях.
Подводя итог…
Таким образом, мы имеем энкодер с широкими допусками к установке: Система RESOLUTE допускает погрешность ±0,5° по углу рысканья, тангажа и крена, а для расстояния между шкалой и считывающей головкой – целых ±150 мкм. В то же время широкая зона охвата оптики и усовершенствованные процедуры коррекции ошибок обеспечивают исключительно высокую устойчивость к оптическим помехам, связанными с пятнами, создаваемыми посторонними частицами или смазкой. При этом сохраняется разрешение 1 нм при скорости 100 м/с: RESOLUTE – вот ответ на самую сложную задачу абсолютных измерений.
При этом сохраняется разрешение 1 нм при скорости 100 м/с: RESOLUTE – вот ответ на самую сложную задачу абсолютных измерений.
PRI 50AR6 HLD 1000 Z V3 2M5R SL-TS Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 1000имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) В наличии Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 1000имп/об, выход ABZ, Uпит. Датчики перемещения OPKON OPKON | В наличии | 5 358 | Купить |
PRI 50AR6 HLD 5000 Z V3 2M5R SL-TS Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 5000имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) В наличии Инкрементальный оптический энкодер (Цельный вал, Dкорп. Датчики перемещения OPKON OPKON | В наличии | 10 716 | Купить |
PRI 50AR6 HLD 2500 Z V3 2M5R SL-TS Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 2500имп/об, выход ABZ, Uпит. В наличии Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 2500имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) Датчики перемещения OPKON OPKON | В наличии | 7 501 | Купить |
PRI 50AR6 HLD 2000 Z V3 2M5R SL-TS Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 2000имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) В наличии Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 2000имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) Датчики перемещения OPKON OPKON | В наличии | 7 501 | Купить |
PRI 50AR6 HLD 1024 Z V3 2M5R SL-TS Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 1024имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) В наличии Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 1024имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) Датчики перемещения OPKON OPKON | В наличии | 5 358 | Купить |
PRI 50AR6 HLD 500 Z V3 2M5R SL-TS Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 500имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) В наличии Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 500имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) Датчики перемещения OPKON OPKON | В наличии | 5 358 | Купить |
PRI 50AR6 HLD 360 Z V3 2M5R SL-TS Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 360имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) В наличии Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 360имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) Датчики перемещения OPKON OPKON | В наличии | 5 358 | Купить |
PRI 50AR6 HLD 100 Z V3 2M5R SL-TS Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 100имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) В наличии Инкрементальный оптический энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 100имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) Датчики перемещения OPKON OPKON | В наличии | 5 358 | Купить |
PRI 40AR6 HLD 1024 Z V3 2M5R SL-RF Инкрементальный оптический энкодер (Цельный вал, Dкорп.=40мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 1024имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 в комплекте) В наличии Инкрементальный оптический энкодер (Цельный вал, Dкорп.=40мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 1024имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 в комплекте) Датчики перемещения OPKON OPKON | В наличии | 5 402 | Купить |
PRI 40AR6 HLD 1000 Z V3 2M5R SL-RF Инкрементальный оптический энкодер (Цельный вал, Dкорп.=40мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 1000имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 в комплекте) В наличии Инкрементальный оптический энкодер (Цельный вал, Dкорп.=40мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 1000имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 в комплекте) Датчики перемещения OPKON OPKON | В наличии | 5 402 | Купить |
PRI 40AR6 HLD 500 Z V3 2M5R SL-RF Инкрементальный оптический энкодер (Цельный вал, Dкорп.=40мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 500имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 в комплекте) В наличии Инкрементальный оптический энкодер (Цельный вал, Dкорп.=40мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 500имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 в комплекте) Датчики перемещения OPKON OPKON | В наличии | 5 402 | Купить |
PRI 40AR6 HLD 360 Z V3 2M5R SL-RF Инкрементальный оптический энкодер (Цельный вал, Dкорп.=40мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 360имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 в комплекте) В наличии Инкрементальный оптический энкодер (Цельный вал, Dкорп.=40мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 360имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 в комплекте) Датчики перемещения OPKON OPKON | В наличии | 5 402 | Купить |
 =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте)
=5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) =50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 5000имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте)
=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 5000имп/об, выход ABZ, Uпит. =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) =5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте)
=5…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) totalkip.ru/report.local/photo/photo1/Foto_opkon_9720.jpg»>
totalkip.ru/report.local/photo/photo1/Foto_opkon_9720.jpg»> totalkip.ru/report.local/photo/photo1/Foto_opkon_9720.jpg»>
totalkip.ru/report.local/photo/photo1/Foto_opkon_9720.jpg»> totalkip.ru/report.local/photo/photo1/Foto_opkon_9720.jpg»>
totalkip.ru/report.local/photo/photo1/Foto_opkon_9720.jpg»> totalkip.ru/report.local/photo/photo1/Foto_opkon_9720.jpg»>
totalkip.ru/report.local/photo/photo1/Foto_opkon_9720.jpg»> totalkip.ru/report.local/photo/photo1/Foto_opkon_9720.jpg»>
totalkip.ru/report.local/photo/photo1/Foto_opkon_9720.jpg»>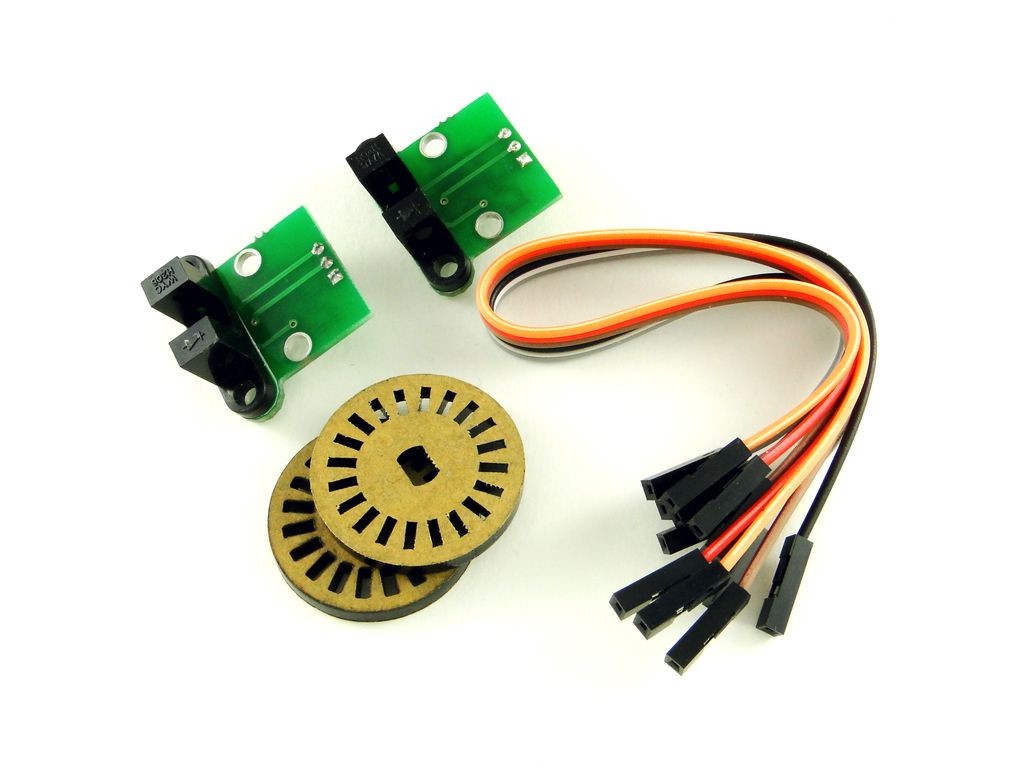 totalkip.ru/report.local/photo/photo1/Foto_opkon_9713.jpg»>
totalkip.ru/report.local/photo/photo1/Foto_opkon_9713.jpg»> totalkip.ru/report.local/photo/photo1/Foto_opkon_9713.jpg»>
totalkip.ru/report.local/photo/photo1/Foto_opkon_9713.jpg»> totalkip.ru/report.local/photo/photo1/Foto_opkon_9713.jpg»>
totalkip.ru/report.local/photo/photo1/Foto_opkon_9713.jpg»> totalkip.ru/report.local/photo/photo1/Foto_opkon_9713.jpg»>
totalkip.ru/report.local/photo/photo1/Foto_opkon_9713.jpg»>Что такое энкодер и его сферы использования?
Благодаря инженерному интересу к робототехнике и ее возможностям, стремительному развитию автомобилестроения и оптимизации работы электро-вычислительных машин, в технике появилось новое устройство под названием энкодер.
Что такое энкодер? Если быть более точным, то энкодер – прибор, который конвертирует угловое или линейное перемещение в последовательность сигналов.
Известен еще как датчик угла поворота – преобразует угол поворота объекта, который вращается (вал) в электрические сигналы, позволяющие определить тот же угол поворота (вала), направление его вращения и положение относительно оси.
Потребность в данном датчике возникла при поиске новых, более совершенных методов создания и работы всем известных сервомоторов. Первым был импульсный магнитный энкодер, который определял положение ротора в системе бесщеточного двигателя постоянного тока (двигатель с электронной коммутацией). Энкодер во время вращения производил импульсы по числу полюсов магнита.
На данный момент по типу действия, мы имеем как минимум три вида энкодеров:
- Магнитные;
- Магниторезисторные;
- Оптические.

Наряду с энкодерами, нередко используются и датчики температуры, поскольку там, где есть механическое или любое другое движение возникает трение и рост температуры, значения которой не должны превышать допустимых норм.
Сферы применения энкодеров
Энкодер используется в:
- печатной промышленности – вращение валов, по которым проходит печатная бумага и краска;
- металлообработке – вращение валов с металлическими лентами и т.д;
- робототехнике – движение разных частей тела робота;
- автомобильной технике – определение положения колес при повороте;
- городском хозяйстве — лифтовой технике;
- пищевая, химическая промышленность — автоматы для фасовки, упаковки и разлива;
- электро-вычислительная техника — компьютерные мыши;
- электротехника – сервомоторы и прочих устройствах, требующих точных измерений показателей движения элементов и объектов.

Учитывая то, что как минимум в пяти из девяти пунктов используются установки, принцип работы которых основан на давлении воздуха/масла/краски, то не лишними будут и датчики давления. Они позволят вовремя определить уровень износа постоянно работающих механизмов и заменить их без вреда для производства.
Выбирая электронное, электронно-механическое и механическое оборудование в интернет-магазине «Энергопуск», вы обеспечиваете свое производство или дом только качественными устройствами, которые будут достойно служить вам.
Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
Принцип работы абсолютного энкодера – rentamatic
Абсолютный энкодер относится к типу энкодеров, который выполняет уникальный код для каждой позиции вала. В отличие от инкрементного энкодера, счетчик импульсов не нужен, т. к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.
к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.
Кодовый диск абсолютного энкодера
Абсолютный энкодер не теряет своего значения при потере питания и не требует возвращения в начальную позицию. Сигнал абсолютного энкодера не подвержен помехам и для него не требуется точная установка вала. Кроме того, даже если кодированный сигнал не может быть прочитан энкодером, если, например, вал вращается слишком быстро, правильный угол вращения будет зарегистрирован, когда скорость вращения уменьшится. Абсолютный энкодер устойчив к вибрациям.
Двоичный код
Двоичный код – это широкораспространенный код, который может обрабатываться непосредственно микропроцессором и является основным кодом для обработки цифровых сигналов. Двоичный код состоит только из 0 и 1.
Двоичный код состоит только из 0 и 1.
Построение ДК осуществляется по следующему принципу:
1x23 + 0x22 + 1x21 + 0x20
Таким образом выглядит в данном случае число 10 в двоичном коде.
Наибольшее число, которое может быть выражено двоичным кодом, зависит от количества используемых разрядов, т.е. от количества битов в комбинации, выражающей число. Например, для выражения числовых значений от 0 до 7 достаточно иметь 3-разрядный или 3-битовый код:
|
Отсюда видно, что для числа больше 7 при 3-разрядном коде уже нет кодовых комбинаций из 0 и 1.
Переходя от чисел к физическим величинам сформулируем вышеприведенное утверждение в более общем виде: наибольшее количество значений m какой-либо величины (угла поворота, напряжения, тока и др.), которое может быть выражено двоичным кодом, зависит от числа используемых разрядов n как m =2 n . Если n =3, как в рассмотренном примере, то получим 8 значений, включая ведущий 0.
Двоичный код является многошаговым кодом. Это означает, что при переходе с одного положения (значения) в другое могут изменяться несколько бит одновременно. Например, число 3 в двоичном коде = 011. Число же 4 в двоичном коде = 100. Соответственно, при переходе от 3 к 4 меняют свое состояние на противоположное все 3 бита одновременно. Считывание такого кода с кодового диска привело бы к тому, что из-за неизбежных отклонений (толеранцев) при производстве кодового диска изменение информации от каждой из дорожек в отдельности никогда не произойдет одновременно. Это, в свою очередь, привело бы к тому, что при переходе от одного числа к другому кратковременно будет выдана неверная информация. Так при вышеупомянутом переходе от числа 3 к числу 4 очень вероятна кратковременная выдача числа 7, когда, например, старший бит во время перехода поменял свое значение немного раньше чем остальные. Таким образом, использование обычного двоичного кода может привести к большим погрешностям, так как две соседние кодовые комбинации могут отличаться друг от друга не в одном, а в нескольких разрядах. Чтобы избежать этого применяется так называемый одношаговый код, например, так называемый Грей-код.
Так при вышеупомянутом переходе от числа 3 к числу 4 очень вероятна кратковременная выдача числа 7, когда, например, старший бит во время перехода поменял свое значение немного раньше чем остальные. Таким образом, использование обычного двоичного кода может привести к большим погрешностям, так как две соседние кодовые комбинации могут отличаться друг от друга не в одном, а в нескольких разрядах. Чтобы избежать этого применяется так называемый одношаговый код, например, так называемый Грей-код.
Код Грея
Код Грея предпочтительнее обычного двоичного тем, что обладает свойством непрерывности бинарной комбинации: изменение кодируемого числа на единицу соответствует изменению кодовой комбинации только в одном разряде. Он строится на базе двоичного по следующему правилу: старший разряд остается без изменения; каждый последующий разряд инвертируется, если предыдущий разряд исходного двоичного кода равен единице. Этот алгоритм построения может быть формально представлен как результат сложения по модулю два исходной комбинации двоичного кода с такой же комбинацией, но сдвинутой на один разряд вправо. При этом крайний правый разряд сдвинутой комбинации отбрасывается.
При этом крайний правый разряд сдвинутой комбинации отбрасывается.
Таким образом, Грей-код является так называемым одношаговым кодом, т.к. при переходе от одного числа к другому всегда меняется лишь какой-то один бит. Погрешность при считывании информации с механического кодового диска при переходе от одного числа к другому приведет лишь к тому, что переход от одного положения к другом будет лишь несколько смещен по времени, однако выдача совершенно неверного значения углового положения при переходе от одного положения к другому полностью исключается.
Преимуществом Грей-кода является также его способность зеркального отображения информации. Так, инвертируя старший бит можно простым образом менять направление счета и, таким образом, подбирать к фактическому (физическому) направлению вращения оси. Изменение направления счета может легко изменяться, управляя так называемым входом ” Complement “. Выдаваемое значение может быть возврастающим или спадающим при одном и том же физическом направлении вращения оси.
Поскольку информация, выраженная в Грей-коде, имеет чисто кодированный характер не несущей реальной числовой информации, должен он перед дальнейшей обработкой сперва преобразован в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар), который к счастью легко реализируется с помощью цепи из логических элементов «исключающее или» ( XOR ) как программным, так и аппаратным способом (см. схему ниже).
Из таблицы видно, что при переходе от одного числа к другому (соседнему) лишь один бит информации меняет свое состояние, если число представлено кодом Грея, в то время, как в двоичном коде могут поменять свое состояние несколько бит одновременно. Код Грея – выход, следовательно, он никогда не имеет ошибку чтения и применяется во многих абсолютных энкодерах.
| Десятичный код | Двоичный код | Код Грея |
23 22 21 20 | ||
0 | 0 0 0 0 | 0 0 0 0 |
| 1 | 0 0 0 1 | 0 0 0 1 |
| 2 | 0 0 1 0 | 0 0 1 1 |
| 3 | 0 0 1 1 | 0 0 1 0 |
4 | 0 1 0 0 | 0 1 1 0 |
| 5 | 0 1 0 1 | 0 1 1 1 |
| 6 | 0 1 1 0 | 0 1 0 1 |
| 7 | 0 1 1 1 | 0 1 0 0 |
8 | 1 1 0 0 | 1 1 0 0 |
| 9 | 1 1 0 0 | 1 1 0 1 |
| 10 | 1 1 0 1 | 1 1 1 1 |
| 11 | 1 0 1 0 | 1 1 1 0 |
12 | 1 1 0 0 | 1 0 1 0 |
| 13 | 1 1 0 1 | 1 0 1 1 |
| 14 | 1 1 1 0 | 1 0 0 1 |
| 15 | 1 1 1 1 | 1 0 0 0 |
Биты меняющие свое состояние, при переходе от одного числа к другому, обозначены красным цветом.
Используйте такую схему для преобразования Кода Грея в двоичный код.
Примечание:
*Код Грея может логически преобразовываться в двоичный код когда терминал Vin подключается к 0 V.
**Инвертор
***Исключающее или
Gray-Excess-Code
Обычный одношаговый Грей-код подходит для разрешений, которые могут быть представлены в виде числа возведенного в степень 2. В случаях, где надо реализовать другие разрешения из обычного Грей-кода, вырезается и используется средний его участок. Таким образом, сохраняется «одношаговость» кода. Однако числовой диапазон начинается не с нуля, а смещяется на определенное значение. При обработке информации от генерируемого сигнала отнимается половина разницы между первоначальным и редуцированным разрешением. Такие разрешения как, например, 360° для выражения угла часто реализируются этим методом. Так 9-ти битный Грей-код равный 512 шагов, урезанный с обеих сторон на 76 шагов будет равен 360°.
Оптические энкодеры | РОБОТОША
Первые оптические энкодеры были разработаны в середине 1940-х годов «Фортепианной компанией Болдуина» для использования в качестве «тоновых колес», которые позволяли электрическим органам имитировать другие музыкальные инструменты. Современные устройства в основном представляют собой миниатюрные версии датчика приближения с использованием прерывания света. В энкодере сфокусированный луч света, направлен на совмещенный с излучателем фотоприемник, периодически прерывается вращающимся диском, расположенным между приемником и передатчиком света и закрепленный на валу контролируемого объекта. Диск может быть непрозрачным с отверстиями, либо прозрачным с нанесенным на него кодированным рисунком. По сравнению с более сложными преобразователями переменного тока, это простая схема кодирования реализует, по существу, цифровой вывод результатов с оптических датчиков в недорогой надежной конструкции с хорошей помехоустойчивостью.
Современные устройства в основном представляют собой миниатюрные версии датчика приближения с использованием прерывания света. В энкодере сфокусированный луч света, направлен на совмещенный с излучателем фотоприемник, периодически прерывается вращающимся диском, расположенным между приемником и передатчиком света и закрепленный на валу контролируемого объекта. Диск может быть непрозрачным с отверстиями, либо прозрачным с нанесенным на него кодированным рисунком. По сравнению с более сложными преобразователями переменного тока, это простая схема кодирования реализует, по существу, цифровой вывод результатов с оптических датчиков в недорогой надежной конструкции с хорошей помехоустойчивостью.
Есть два основных типа оптических энкодеров: инкрементные и абсолютные. Инкрементный энкодер измеряет скорость вращения и может выдать относительное положение, в то время как абсолютный энкодер измеряет непосредственно угловое положение и на выходе дает скорость. Если не принимать во внимание изменение информации о местоположении, то с инкрементным энкодером, как правило, легче работать и он обеспечивает эквивалентное разрешение при гораздо более низкой стоимости, чем абсолютные оптические энкодеры.
Инкрементный оптический энкодер
Оптические поворотные инкрементные энкодеры, еще их называют датчиками угла поворота, стали наиболее популярным устройством для измерения угловой скорости и положения в моторах, на валу колеса или рулевого механизма. В мобильных роботах, энкодеры используются для контроля положения или скорости колес и других, управляемых при помощи моторов соединений. Из-за того, что энкодеры являются проприоцептивными датчиками, их оценка положения является лучшей в системе координат робота и, при решении задачи локализации робота (см. слайды «Проблема локализации мобильного робота»), требуются значительные поправки.
Принцип действия инкрементного энкодера
Простейшим типом инкрементного энкодера является одноканальный тахометр, обычно состоящий из механического прерывателя света, производящего определенное количество прямоугольных или синусоидальных импульсов, при каждом обороте вала. Увеличение числа импульсов увеличивает разрешение (и стоимость) модуля. Разрешение энкодера измеряется в числе отсчетов на оборот (CPR, cycles per revolution). Минимальное угловое разрешение легко вычислить по величине CPR. Типичный энкодер в мобильной робототехнике имеет значение 2000 CPR, в то же время промышленный оптический энкодер может иметь параметр CPR равный 10000. С точки зрения требуемого диапазона, конечно же важно, чтобы энкодер был достаточно быстрым, чтобы успевать считывать значения на предполагаемой скорости вращения. Промышленные оптические энкодеры полностью удовлетворяют требованиям, предъявляемым в робототехнических приложениях.
Разрешение энкодера измеряется в числе отсчетов на оборот (CPR, cycles per revolution). Минимальное угловое разрешение легко вычислить по величине CPR. Типичный энкодер в мобильной робототехнике имеет значение 2000 CPR, в то же время промышленный оптический энкодер может иметь параметр CPR равный 10000. С точки зрения требуемого диапазона, конечно же важно, чтобы энкодер был достаточно быстрым, чтобы успевать считывать значения на предполагаемой скорости вращения. Промышленные оптические энкодеры полностью удовлетворяют требованиям, предъявляемым в робототехнических приложениях.
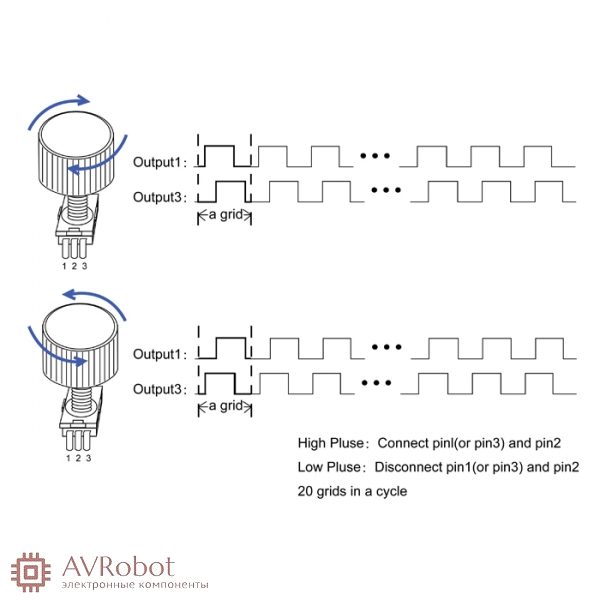
Эти, относительно недорогие устройства используются в качестве датчиков скорости в цепи обратной связи в системах управления, работающих на средних и высоких скоростях, но на очень малых скоростях чувствительны к шумам и проблемам со стабилизацией из-за ошибок квантования. Здесь нужно искать компромисс между разрешением и скоростью обновления: улучшенная переходная характеристика требует большей скорости обновления, которая для данного числа линий уменьшает число возможных импульсов энкодера для интервала дискретизации.
В дополнение к нестабильности на низких скоростях, одноканальный тахометр также неспособен определять направление вращения и, следовательно, не может быть использован в качестве датчика положения. Квадратурные энкодеры, преодолели эти проблемы путем добавления второго канала, смещенного относительно первого, поэтому результирующие последовательности импульсов сдвинуты по фазе на 90 градусов, как показано на рисунке ниже. Этот метод позволяет декодирующей электронике определить, какой канал опережает другой и, следовательно, установить направление вращения. Кроме того, четыре детектируемых различных состояния увеличивают разрешение в четыре раза без изменения диска прерывателя. Таким образом, энкодер, имеющий 2000 CPR выдаст при квадратурной реализации даст уже 8000 отсчетов. Дальнейшее улучшение возможно путем измерения синусоидальной волны с помощью оптического детектора и выполнения сложной интерполяции. Такие методы, хотя и редко используемые в мобильной робототехнике, могут дать 1000-кратное увеличение разрешения.
Принцип действия квадратурного инкрементного оптического энкодера
Следствием инкрементного характера фазо-квадратурных выходных сигналов является то, что любое разрешение углового положения может быть выражено не в абсолютной форме, а только относительно некоторой опорной точки. Создание такой точки отсчета может быть произведено несколькими способами. Для приложений, включающих непрерывное вращение на 360 градусов, большинство энкодеров включает в качестве третьего канала специальный индексный выход, который переходит в высокое состояние на каждом полном обороте вала. Промежуточные положения вала затем определяются числом, на которое увеличился, или уменьшился счетчик импульсов от этого известного индексированного положения. Одним из недостатков такого подхода является потеря информации об относительном положении в случае сбоя питания.
В случае ограниченного вращения, такого как возвратно-поступательное движение вдоль направляющих (как в станках с ЧПУ) можно использовать электрические концевые выключатели и/или механические ограничители для задания исходного положения. Для улучшения повторяемости, возврат в исходное положение разбивается на два этапа. Ось вращается с пониженной скоростью в соответствующем направлении до тех пор, пока не встретится механизм остановки, после чего происходит обраткое вращение в течение предопределенного короткого промежутка времени. Вал вращается медленно обратно до остановки на заданной медленной скорости из этой заданной начальной точки, тем самым, устраняя любые изменения в инерциальной нагрузке, которые могли бы повлиять на окончательное исходное положение. Этот двухэтапный подход используется, например, при старте шагового двигателя для инициализации позиционирования печатающей головки в принтерах.
Для улучшения повторяемости, возврат в исходное положение разбивается на два этапа. Ось вращается с пониженной скоростью в соответствующем направлении до тех пор, пока не встретится механизм остановки, после чего происходит обраткое вращение в течение предопределенного короткого промежутка времени. Вал вращается медленно обратно до остановки на заданной медленной скорости из этой заданной начальной точки, тем самым, устраняя любые изменения в инерциальной нагрузке, которые могли бы повлиять на окончательное исходное положение. Этот двухэтапный подход используется, например, при старте шагового двигателя для инициализации позиционирования печатающей головки в принтерах.
С другой стороны, функция абсолютного индексирования может быть основана на каком-то внешнем действии по созданию опорной точки, которое отделено от цикла непосредственного сервоуправления. Хорошей иллюстрацией этой ситуации служит инкрементный датчик, используемый для отслеживания угла рулевого управления платформы. Например, когда робот включается в первый раз, абсолютный угол рулевого управления неизвестен и должен быть инициализирован, используя «привязку» действия к маякам на док-станции, соседней стене, или какой-либо другой идентифицирующий набор ориентиров. Увеличение или уменьшение значения счетчика электронного декодера используется для изменения регистра направления транспортного средства в относительной форме.
Например, когда робот включается в первый раз, абсолютный угол рулевого управления неизвестен и должен быть инициализирован, используя «привязку» действия к маякам на док-станции, соседней стене, или какой-либо другой идентифицирующий набор ориентиров. Увеличение или уменьшение значения счетчика электронного декодера используется для изменения регистра направления транспортного средства в относительной форме.
Как и большинство проприоцептивных датчиков, энкодеры, как правило, находятся в контролируемой среде внутренней структуры мобильного робота, и поэтому систематическая ошибка и кросс-чувствительность могут быть устранены. Точность оптических датчиков часто предполагается равной 100%, и, хотя это может быть не совсем корректно, какие-либо ошибки оптического датчика являются незначительными ошибками по сравнению с тем, что происходит за валом двигателя.
Абсолютный оптический энкодер
Абсолютные энкодеры обычно используются в приложениях с медленным вращением в которых недопустима потенциальная потеря информации о положении. Элементы дискретного детектора в фотоэлектрической матрице индивидуально совмещены с концентрическими дорожками на светопрерывателе, создавая эффект бесконтактной реализации энкодера с щеточными контактами. Назначение отдельной дорожки для каждого бита результирующего разрешения приводит к дискам большего размера (по сравнению с конструкцией инкрементного энкодера) и соответствующему снижению допустимого отклонения при ударе и вибрации. При этом каждая дополнительная дорожка энкодера удваивает разрешение, но учетверяет стоимость датчика.
Элементы дискретного детектора в фотоэлектрической матрице индивидуально совмещены с концентрическими дорожками на светопрерывателе, создавая эффект бесконтактной реализации энкодера с щеточными контактами. Назначение отдельной дорожки для каждого бита результирующего разрешения приводит к дискам большего размера (по сравнению с конструкцией инкрементного энкодера) и соответствующему снижению допустимого отклонения при ударе и вибрации. При этом каждая дополнительная дорожка энкодера удваивает разрешение, но учетверяет стоимость датчика.
Принцип действия абсолютного оптического энкодера
Вместо последовательного потока битов, как в инкрементном датчике, абсолютные оптические энкодеры обеспечивают параллельный вывод слова данных с уникальным кодом шаблона для каждого дискретного положения вала. Чаще всего используется код Грея, двоичное и двоично-десятичное кодирование. Характерной особенностью кода Грея (по имени изобретателя Франка Грея из Bell Labs) является то, что только один бит изменяется за раз, помогая избежать тем самым асинхронных неоднозначностей, обусловленными электронными и механическими допусками элементов. С другой стороны, двоичный код постоянно включает множество измененных битов при увеличении или уменьшении счета на единицу. Например, при переходе из положения 255 в положение 0, восемь бит меняются с 1 в 0. Так как нет никакой гарантии, что все пороговые детекторы, являющиеся элементами слежения детектора сработают одновременно, в момент перехода будет присутствовать значительная неопределенность в данной схеме кодирования. Поэтому требуется дополнительный сигнал подтверждения правильности данных, если больше чем один бит изменился между последовательными положениями энкодера.
С другой стороны, двоичный код постоянно включает множество измененных битов при увеличении или уменьшении счета на единицу. Например, при переходе из положения 255 в положение 0, восемь бит меняются с 1 в 0. Так как нет никакой гарантии, что все пороговые детекторы, являющиеся элементами слежения детектора сработают одновременно, в момент перехода будет присутствовать значительная неопределенность в данной схеме кодирования. Поэтому требуется дополнительный сигнал подтверждения правильности данных, если больше чем один бит изменился между последовательными положениями энкодера.
Поворот 8-битного диска с кодом Грея
На рисунке слева поворот против часовой стрелки на одну позицию становится причиной изменения только одного бита. На рисунке справа такой же поворот двоично-кодированного диска станет причиной изменения всех битов в частном случае (с 255 в 0) иллюстрируя тем самым опорную линию на 12 часов.
Абсолютные энкодеры лучше всего подходят для медленных и/или редких поворотов, таких как кодирование угла поворота рулевого колеса, в отличие от измерения высокоскоростного непрерывного (например, ведущее колесо) вращения, которое потребует вычисления смещения вдоль всего пути движения. Хотя и не столь надежны как резольверы для высокотемпературных или в приложениях с высокой ударной стойкостью, абсолютные энкодеры могут работать при температурах свыше 125 градусов и средним разрешением (1000 отсчетов на оборот). Потенциальным недостатком абсолютных энкодеров является их параллельный вывод данных, который требует более сложного интерфейса из-за большего количества проводов. 13-битный абсолютный энкодер, использующий дополнительные выходные сигналы для помехоустойчивости потребует 28-жильный кабель (13 сигнальных пар плюс питание и заземление) вместо шести в случае с резольвером или инкрементным энкодером.
Хотя и не столь надежны как резольверы для высокотемпературных или в приложениях с высокой ударной стойкостью, абсолютные энкодеры могут работать при температурах свыше 125 градусов и средним разрешением (1000 отсчетов на оборот). Потенциальным недостатком абсолютных энкодеров является их параллельный вывод данных, который требует более сложного интерфейса из-за большего количества проводов. 13-битный абсолютный энкодер, использующий дополнительные выходные сигналы для помехоустойчивости потребует 28-жильный кабель (13 сигнальных пар плюс питание и заземление) вместо шести в случае с резольвером или инкрементным энкодером.
Еще по этой теме
Вы можете пропустить чтение записи и оставить комментарий. Размещение ссылок запрещено.
Артикул | Что такое кодер?
Если вы кодировщик Google, вы получите огромное и запутанное множество ответов. Для наших целей энкодеры используются в машинах для обратной связи и управления движением. Энкодеры используются в машинах всех отраслей промышленности. Вы найдете энкодеры, используемые в приложениях для резки по длине, плоттерах, робототехнике, упаковке, транспортировке, автоматизации, сортировке, заполнении, визуализации и многом другом. Возможно, вы никогда их не замечали, но они есть.В этом сообщении блога и видео мы познакомим вас с тем, что такое кодировщик и что он делает.
Энкодеры используются в машинах всех отраслей промышленности. Вы найдете энкодеры, используемые в приложениях для резки по длине, плоттерах, робототехнике, упаковке, транспортировке, автоматизации, сортировке, заполнении, визуализации и многом другом. Возможно, вы никогда их не замечали, но они есть.В этом сообщении блога и видео мы познакомим вас с тем, что такое кодировщик и что он делает.
Что такое энкодер?
Проще говоря, энкодер — это сенсорное устройство, обеспечивающее обратную связь. Энкодеры преобразуют движение в электрический сигнал, который может считываться каким-либо устройством управления в системе управления движением, например, счетчиком или ПЛК. Энкодер отправляет сигнал обратной связи, который можно использовать для определения положения, счета, скорости или направления. Устройство управления может использовать эту информацию для отправки команды для конкретной функции.Например:
- При отрезке по заданной длине энкодер с измерительным колесом сообщает управляющему устройству, сколько материала было подано, чтобы управляющее устройство знало, когда нужно резать.
- В обсерватории энкодеры сообщают исполнительным механизмам, в каком положении находится подвижное зеркало, обеспечивая обратную связь по положению.
- На домкратах для подъема железнодорожных вагонов точная обратная связь по движению обеспечивается энкодерами, поэтому домкраты поднимаются синхронно.
- В прецизионной системе нанесения этикеток с сервоприводом сигнал энкодера используется ПЛК для управления синхронизацией и скоростью вращения бутылки.
- В приложении для печати обратная связь от кодировщика активирует печатающую головку для создания метки в определенном месте.
- В случае большого крана энкодеры, установленные на валу двигателя, обеспечивают обратную связь по позиционированию, чтобы кран знал, когда поднять или снять груз.
- В приложении, где наполняются бутылки или банки, обратная связь сообщает машинам наполнения о положении контейнеров.
- В лифте энкодеры сообщают контроллеру, когда кабина достигла нужного этажа в правильном положении. То есть обратная связь от энкодера к контроллеру лифта гарантирует, что двери лифта открываются на уровне пола. Без энкодеров вы могли бы подняться или выйти из лифта, а не просто выйти на ровный пол.
- На автоматизированных сборочных линиях энкодеры сообщают роботам о движении. На автомобильной сборочной линии это может означать, что роботизированные сварочные рукава получают правильную информацию для сварки в правильных местах.

 То есть обратная связь от энкодера к контроллеру лифта гарантирует, что двери лифта открываются на уровне пола. Без энкодеров вы могли бы подняться или выйти из лифта, а не просто выйти на ровный пол.
То есть обратная связь от энкодера к контроллеру лифта гарантирует, что двери лифта открываются на уровне пола. Без энкодеров вы могли бы подняться или выйти из лифта, а не просто выйти на ровный пол.В любом приложении процесс одинаков: энкодер генерирует счетчик и отправляет его на контроллер, который затем посылает машине сигнал для выполнения функции.
Как работает энкодер?
Кодировщики
используют различные типы технологий для создания сигнала, в том числе механические, магнитные, резистивные и оптические, наиболее распространенными из которых являются оптические. При оптическом считывании датчик обеспечивает обратную связь на основе прерывания света.
На приведенном ниже рисунке показана базовая конструкция инкрементного поворотного энкодера с использованием оптической технологии. Луч света, излучаемый светодиодом, проходит через кодовый диск, на котором нанесены непрозрачные линии (очень похожие на спицы велосипедного колеса).Когда вал энкодера вращается, световой луч от светодиода прерывается непрозрачными линиями на кодовом диске, прежде чем он улавливается узлом фотодетектора. При этом генерируется импульсный сигнал: горит = горит; нет света = выкл. Сигнал отправляется на счетчик или контроллер, который затем посылает сигнал для выполнения желаемой функции.
Луч света, излучаемый светодиодом, проходит через кодовый диск, на котором нанесены непрозрачные линии (очень похожие на спицы велосипедного колеса).Когда вал энкодера вращается, световой луч от светодиода прерывается непрозрачными линиями на кодовом диске, прежде чем он улавливается узлом фотодетектора. При этом генерируется импульсный сигнал: горит = горит; нет света = выкл. Сигнал отправляется на счетчик или контроллер, который затем посылает сигнал для выполнения желаемой функции.
В чем разница между абсолютным и инкрементным энкодером?
Энкодеры могут выдавать как инкрементальные, так и абсолютные сигналы.Инкрементальные сигналы не указывают конкретное положение, а только то, что положение изменилось. Абсолютные энкодеры, с другой стороны, используют разные «слова» для каждой позиции, что означает, что абсолютный энкодер обеспечивает как индикацию изменения положения, так и индикацию абсолютного положения энкодера.
Получить дополнительную информацию
Не уверены, какое решение с обратной связью по движению подходит для вашего приложения? Позвоните нам. Когда вы звоните в EPC, вы общаетесь с настоящими инженерами и экспертами по энкодерам, которые могут помочь вам определить правильное решение по энкодеру для вашего приложения.Свяжитесь с EPC сегодня.
Когда вы звоните в EPC, вы общаетесь с настоящими инженерами и экспертами по энкодерам, которые могут помочь вам определить правильное решение по энкодеру для вашего приложения.Свяжитесь с EPC сегодня.
Для получения более подробной информации о том, как работают кодировщики, см. технический документ The Basics of How an Encoder Works или посмотрите это видео:
Оптический и магнитный, инкрементный и поворотный
Что такое энкодер?
Энкодер — это датчик механического движения, генерирующий цифровые сигналы в ответ на движение. Как электромеханическое устройство, энкодер может предоставить пользователям системы управления движением информацию о положении, скорости и направлении.Существует два различных типа энкодеров: линейные и поворотные. Линейный энкодер реагирует на движение по траектории, а поворотный энкодер реагирует на вращательное движение. Кодировщик обычно классифицируется по средствам его вывода. Инкрементальный энкодер генерирует серию импульсов, которые можно использовать для определения положения и скорости. Абсолютный энкодер генерирует уникальные битовые конфигурации для непосредственного отслеживания позиций.
Линейный энкодер реагирует на движение по траектории, а поворотный энкодер реагирует на вращательное движение. Кодировщик обычно классифицируется по средствам его вывода. Инкрементальный энкодер генерирует серию импульсов, которые можно использовать для определения положения и скорости. Абсолютный энкодер генерирует уникальные битовые конфигурации для непосредственного отслеживания позиций.
Блок-схема энкодеров
Основные типы энкодеров
Линейные и угловые энкодеры делятся на два основных типа: абсолютный энкодер и инкрементный энкодер.Конструкция этих двух типов энкодеров очень похожа; однако они различаются по физическим свойствам и интерпретации движения.
Инкрементальный энкодер
Односторонний энкодер
Инкрементальный поворотный энкодер также называется квадратурным энкодером. В этом типе энкодера используются датчики, использующие оптический, механический или магнитный индекс для угловых измерений.
Как работают инкрементальные энкодеры?
В инкрементальных поворотных энкодерах используется прозрачный диск, который содержит непрозрачные участки, расположенные на равном расстоянии друг от друга для определения движения.Светоизлучающий диод используется для прохождения через стеклянный диск и обнаруживается фотодетектором. Это заставляет энкодер генерировать последовательность равноотстоящих импульсов при вращении. Выходной сигнал инкрементных поворотных энкодеров измеряется в импульсах на оборот, что используется для отслеживания положения или определения скорости.
Одноканальный выход обычно применяется в приложениях, в которых направление движения не имеет значения. В случаях, когда важно определение направления, используется 2-канальный квадратурный выход.Два канала, A и B, обычно сдвинуты по фазе на 90 электрических градусов, и электронные компоненты определяют направление на основе соотношения фаз между двумя каналами. Положение инкрементного энкодера определяется путем сложения всех импульсов счетчиком.
Положение инкрементного энкодера определяется путем сложения всех импульсов счетчиком.
Отказ инкрементного энкодера – это потеря счета, возникающая при отключении питания. При перезапуске оборудование должно быть переведено в исходное положение для повторной инициализации счетчика. Однако некоторые инкрементальные энкодеры, например те, которые продаются в Anaheim Automation, оснащены третьим каналом, называемым индексным каналом.Индексный канал выдает один импульс сигнала за один оборот вала энкодера и часто используется в качестве эталонного маркера. Контрольный маркер затем обозначается как начальная позиция, которая может возобновить подсчет или отслеживание позиции.
ПРИМЕЧАНИЕ: Инкрементальные энкодеры не так точны, как абсолютные энкодеры, из-за возможности помех или неправильного считывания.
Абсолютный энкодер
Абсолютный энкодер содержит компоненты, которые также присутствуют в инкрементальных энкодерах. Они реализуют фотодетектор и светодиодный источник света, но вместо диска с равномерно расположенными линиями на диске абсолютный энкодер использует диск с узорами концентрических кругов.
Они реализуют фотодетектор и светодиодный источник света, но вместо диска с равномерно расположенными линиями на диске абсолютный энкодер использует диск с узорами концентрических кругов.
Как работают абсолютные энкодеры?
Абсолютные энкодеры используют неподвижную маску между фотодетектором и диском энкодера, как показано ниже. Выходной сигнал, генерируемый абсолютным энкодером, представляет собой цифровые биты, соответствующие уникальной позиции. Битовая конфигурация создается светом, попадающим на фотодетектор при вращении диска.Полученная световая конфигурация преобразуется в код Грея. В результате каждая позиция имеет свою уникальную битовую конфигурацию.
Датчик линейных перемещений
Линейный энкодер представляет собой датчик, преобразователь или считывающую головку, соединенную со шкалой, которая кодирует положение. Датчик считывает показания шкалы и преобразует положение в аналоговый или цифровой сигнал, который преобразуется в цифровое считывание. Движение определяется изменением положения во времени.Как оптические, так и магнитные линейные энкодеры работают с использованием этого типа метода. Тем не менее, именно их физические свойства делают их разными.
Движение определяется изменением положения во времени.Как оптические, так и магнитные линейные энкодеры работают с использованием этого типа метода. Тем не менее, именно их физические свойства делают их разными.
Как работают оптические датчики линейных перемещений?
Источник света и линза создают параллельный пучок света, который проходит через четыре окна сканирующей сетки. Четыре окна сканирования сдвинуты друг от друга на 90 градусов. Затем свет проходит через стеклянную шкалу и регистрируется фотодатчиками. Затем весы преобразуют обнаруженный световой луч при перемещении блока сканирования.Обнаружение света фотодатчиком производит синусоидальные выходные волны. Затем система линейного энкодера объединяет сдвинутые сигналы для создания двух синусоидальных выходных сигналов, которые симметричны, но сдвинуты по фазе друг от друга на 90 градусов. Опорный сигнал создается, когда пятый шаблон на сканирующей сетке совмещается с идентичным шаблоном на шкале.
Как работает линейный энкодер?
Система линейного энкодера использует считывающую головку магнитного датчика и магнитную шкалу для получения TTL или аналогового выходного сигнала для каналов A и B.Когда магнитный датчик проходит вдоль магнитной шкалы, датчик обнаруживает изменение магнитного поля и выдает сигнал. Эта частота выходного сигнала пропорциональна скорости измерения и смещению датчика. Поскольку линейный энкодер обнаруживает изменение магнитного поля, помехи света, масла, пыли и мусора не влияют на этот тип системы; поэтому они обеспечивают высокую надежность в суровых условиях.
Магнитный датчик вращения
Магнитный энкодер состоит из двух частей: ротора и датчика.Ротор вращается вместе с валом и содержит чередующиеся, равномерно расположенные северный и южный полюса по его окружности. Датчик обнаруживает эти небольшие смещения в положении N>>S и S>>N. Существует множество методов обнаружения изменений магнитного поля, но в энкодерах используются два основных типа: эффект Холла и магниторезистивное сопротивление. Датчики на эффекте Холла работают, обнаруживая изменение напряжения за счет магнитного отклонения электронов. Магниторезистивные датчики обнаруживают изменение сопротивления, вызванное магнитным полем.
Существует множество методов обнаружения изменений магнитного поля, но в энкодерах используются два основных типа: эффект Холла и магниторезистивное сопротивление. Датчики на эффекте Холла работают, обнаруживая изменение напряжения за счет магнитного отклонения электронов. Магниторезистивные датчики обнаруживают изменение сопротивления, вызванное магнитным полем.
Обнаружение на эффекте Холла
Датчик генерирует и обрабатывает сигналы на эффекте Холла, создавая квадратурный сигнал, как это обычно бывает с оптическими энкодерами. Выходные данные формируются путем измерения распределения магнитного потока по поверхности чипа. Выходная точность зависит от радиального расположения ИС по отношению к целевому магниту. Поверхность чипа должна быть параллельна магниту, чтобы воздушный зазор между магнитом и датчиком был одинаковым по всей поверхности датчика.
Магнитные энкодеры избегают трех уязвимых мест, с которыми сталкиваются оптические энкодеры:
• Нарушения герметичности, которые допускают проникновение загрязняющих веществ
• Оптический диск может разрушиться во время вибрации или удара а также дает возможность уменьшить количество отказов подшипников.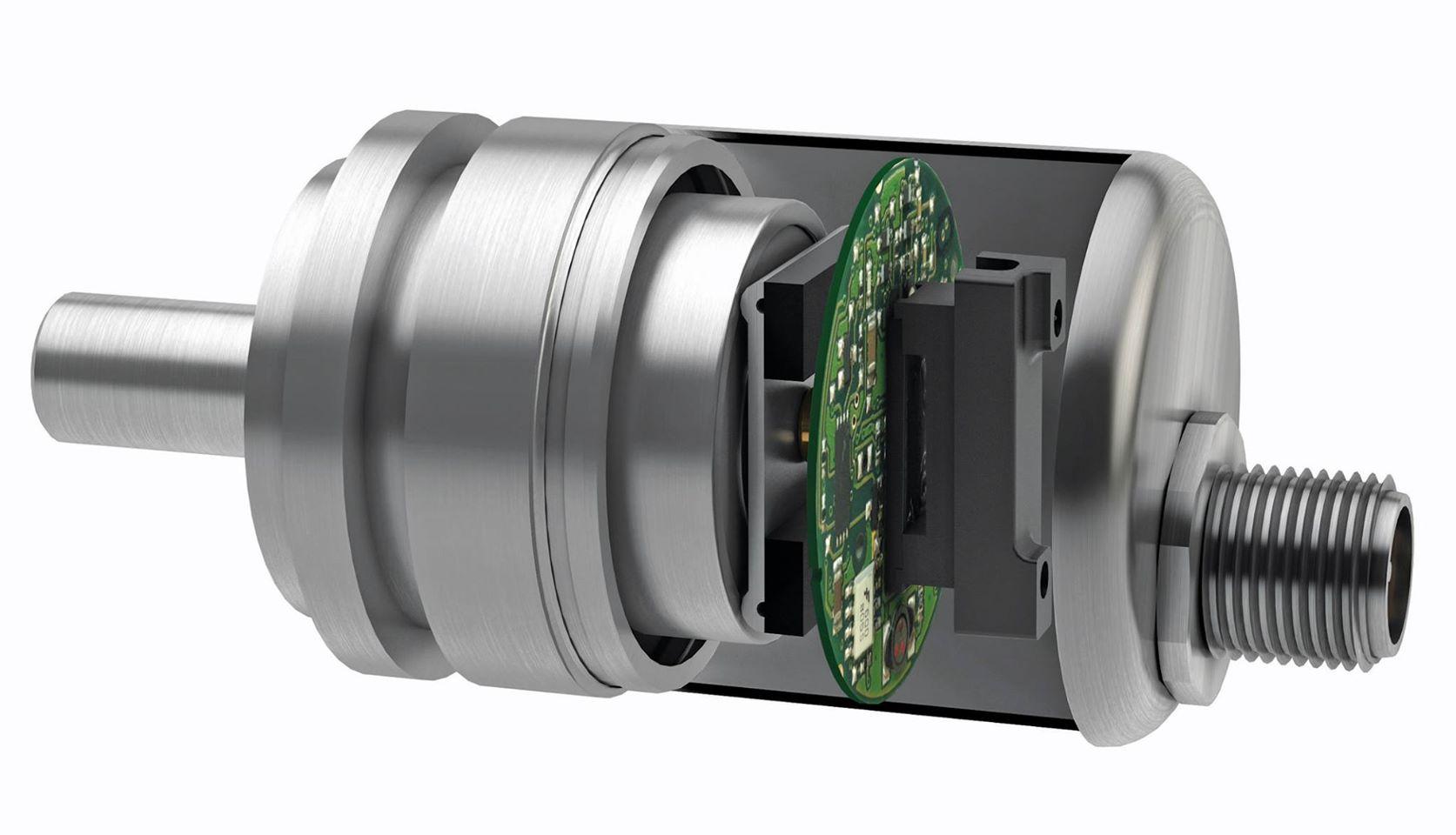 Магнитные энкодеры не делают ошибок из-за загрязнения, потому что их датчики обнаруживают изменения магнитных полей, встроенных в ротор, а масло, грязь и вода не влияют на эти магнитные поля.
Магнитные энкодеры не делают ошибок из-за загрязнения, потому что их датчики обнаруживают изменения магнитных полей, встроенных в ротор, а масло, грязь и вода не влияют на эти магнитные поля.
Датчики Холла
обычно дешевле и менее точны, чем датчики магнитного сопротивления. Это означает, что датчики на эффекте Холла при использовании в энкодере производят больше «джиттера» или ошибки в сигнале, вызванной изменениями датчика.
Коммутационные энкодеры
Коммутационный энкодер содержит те же основные компоненты, что и инкрементальные энкодеры, но с добавлением коммутационных дорожек вдоль внешнего края диска для вывода U/V/W.
Как работают коммутационные энкодеры?
Коммутационные энкодеры
используют прозрачный диск, который включает в себя непрозрачные участки, расположенные на равном расстоянии друг от друга для определения движения. Светоизлучающий диод используется для прохождения через стеклянный диск и обнаруживается фотодетектором. Это заставляет энкодер генерировать последовательность равноотстоящих импульсов при вращении. Выходной сигнал инкрементных поворотных энкодеров измеряется в импульсах на оборот, что используется для отслеживания положения или определения скорости.
Это заставляет энкодер генерировать последовательность равноотстоящих импульсов при вращении. Выходной сигнал инкрементных поворотных энкодеров измеряется в импульсах на оборот, что используется для отслеживания положения или определения скорости.
Внешняя часть диска энкодера включает коммутационные дорожки, которые предоставляют контроллеру информацию о точном положении полюсов двигателя, так что на двигатель может подаваться правильный входной сигнал контроллера. Коммутационные дорожки энкодера считывают положение двигателя и инструктируют контроллер о том, как обеспечить эффективный и правильный ток двигателя, чтобы вызвать вращение. Коммутационный выход для U/V/W может быть в виде дифференциального выхода или с открытым коллектором (зависит от производителя).
Как управляются энкодеры?
Энкодеры управляются вращением вала, на котором они установлены. Вал входит в контакт со ступицей, которая находится внутри энкодера. Когда вал вращается, он заставляет диск с прозрачными и сплошными линиями вращаться поперек схемы энкодера. Схема энкодера содержит светодиод, который улавливается фотоэлектрическим диодом и выдает пользователю импульсы. Скорость вращения диска будет зависеть от скорости вала, к которому подключен энкодер.Линии оптических и магнитных энкодеров Anaheim Automation питаются от одного источника питания +5 В постоянного тока и могут потреблять и подавать по 8 мА каждая.
Схема энкодера содержит светодиод, который улавливается фотоэлектрическим диодом и выдает пользователю импульсы. Скорость вращения диска будет зависеть от скорости вала, к которому подключен энкодер.Линии оптических и магнитных энкодеров Anaheim Automation питаются от одного источника питания +5 В постоянного тока и могут потреблять и подавать по 8 мА каждая.
Физические свойства
Датчики линейных перемещений
Ключевыми компонентами линейного энкодера являются сканирующее устройство, датчик, преобразователь или считывающая головка в сочетании с пропускающей или отражающей шкалой, которая кодирует положение. Шкала линейного энкодера обычно изготавливается из стекла и крепится к опоре, а блок сканирования содержит источник света, фотоэлементы и вторую часть стекла, называемую сканирующей сеткой.В совокупности линейный энкодер может преобразовывать движение в цифровые или аналоговые сигналы для определения изменения положения во времени.
Энкодеры
Ключевыми компонентами поворотного энкодера являются диск, источники света и детекторы, а также электроника. Диск содержит уникальный рисунок концентрических выгравированных кругов и чередует непрозрачные и прозрачные сегменты. Этот шаблон обеспечивает уникальные битовые конфигурации и используется для назначения определенных позиций.Для каждого концентрического кольца в энкодере есть источник света и детектор света, которые идентифицируют линии, выгравированные на диске. Электроника состоит из устройства вывода, которое принимает сигнал, полученный от датчика (источника света/детектора), для обеспечения обратной связи по положению и/или скорости. Все эти компоненты заключены в единый корпус.
Инкрементальные энкодеры
Датчик дифференциального типа
Ключевыми компонентами инкрементного энкодера являются стеклянный диск, светодиод (светоизлучающий диод) и фотодетектор. Прозрачный диск содержит непрозрачные секции, которые расположены на одинаковом расстоянии друг от друга, чтобы отклонять свет, в то время как прозрачные секции пропускают свет, как показано на рисунке 2 ниже. В оптическом кодере используется светоизлучающий диод, который пропускает свет через прозрачные участки диска. Проходящий через него свет принимается фотодетектором, который выдает электрический сигнал.
Прозрачный диск содержит непрозрачные секции, которые расположены на одинаковом расстоянии друг от друга, чтобы отклонять свет, в то время как прозрачные секции пропускают свет, как показано на рисунке 2 ниже. В оптическом кодере используется светоизлучающий диод, который пропускает свет через прозрачные участки диска. Проходящий через него свет принимается фотодетектором, который выдает электрический сигнал.
Где используются энкодеры?
Кодировщики
стали жизненно важным источником для многих приложений, которым требуется информация обратной связи.Независимо от того, касается ли приложение скорости, направления или расстояния, широкие возможности энкодеров позволяют пользователям использовать эту информацию для точного управления. С появлением более высоких разрешений, надежности и снижения затрат кодировщики стали предпочитаемой технологией во все большем количестве областей. Сегодня приложения для кодирования окружают нас повсюду. Они используются в принтерах, автоматике, медицинских сканерах и научном оборудовании.
Линейка экономичных энкодеров Anaheim Automation — разумный выбор для приложений, требующих управления с обратной связью.Клиенты Anaheim Automation для продуктовой линейки энкодеров разнообразны: промышленные компании, эксплуатирующие или разрабатывающие автоматизированное оборудование для пищевой промышленности, этикетирования, резки по длине, конвейеров, погрузочно-разгрузочных работ, робототехники, медицинской диагностики и станков с ЧПУ.
Кодировщики используются во многих отраслях промышленности
Кодировщики стали важным компонентом приложений во многих различных отраслях. Ниже приведен неполный список отраслей, использующих кодировщики:
• Automotive – Автомобильная промышленность использует энкодеры, так как датчики механического движения могут применяться для управления скоростью.
• Бытовая электроника и офисное оборудование – В производстве бытовой электроники кодировщики широко используются в офисном оборудовании, таком как сканирующее оборудование на базе ПК, принтеры и сканеры.
• Industrial – В промышленности датчики положения используются в этикетировочных, упаковочных и станочных станках с одно- и многоосевыми контроллерами двигателей. Энкодеры также можно найти в системе управления станком с ЧПУ.
• Медицинский – В медицинской промышленности энкодеры используются в медицинских сканерах, микроскопическом или наноскопическом управлении движением автоматических устройств и дозирующих насосов.
• Военные — Военные также используют энкодеры в антеннах для определения местоположения.
• Научные инструменты – Научное оборудование включает энкодеры для позиционирования телескопа обсерватории.
Приложения для энкодеров
Энкодер можно использовать в приложениях, требующих обратной связи по положению, скорости, расстоянию и т. д. Приведенные ниже примеры иллюстрируют широкие возможности и реализации энкодера:
• Робототехника
• Этикетировочные машины
• Медицинское оборудование
• Текстиль
• Сверлильные станки
• Обратная связь двигателя
• Сборочные машины
• Упаковка
• Системы индикации X и Y
• Принтеры
• Испытательные машины
• Станки с ЧПУ
Как выбрать энкодер
Существует несколько важных критериев выбора правильного кодировщика:
1. Выход
Выход
2. Требуемое разрешение (CPR)
3. Шум и длина кабеля
4. Индексный канал
5. Крышка/основание
Выход
Вывод зависит от того, что требуется приложению. Есть две формы вывода: инкрементная и абсолютная. Инкрементальные выходные формы принимают форму прямоугольных выходных сигналов. Для приложения, требующего инкрементного энкодера, выходной сигнал равен нулю или напряжению питания. Выход инкрементного энкодера всегда представляет собой прямоугольную волну из-за переключения высокого (значение входного напряжения) и низкого (нулевое) значения сигнала.Абсолютные энкодеры работают так же, как инкрементальные энкодеры, но имеют разные методы вывода. Разрешение абсолютного энкодера описывается в битах. Выход абсолютных энкодеров относится к его положению в виде цифрового слова. Вместо непрерывного потока импульсов, наблюдаемого в инкрементальных энкодерах, абсолютные энкодеры выводят уникальное слово для каждой позиции в виде битов. Эквивалентно 1024 импульсам на оборот, абсолютный энкодер имеет 10 бит (210 = 1024).
Эквивалентно 1024 импульсам на оборот, абсолютный энкодер имеет 10 бит (210 = 1024).
Требуемое разрешение (CPR)
Разрешение инкрементальных энкодеров часто описывается в терминах количества циклов на оборот (CPR). Циклов на оборот — это количество выходных импульсов за полный оборот диска энкодера. Например, энкодер с разрешением 1000 означает, что за один полный оборот энкодера генерируется 1000 импульсов.
Шум и длина кабеля
При выборе правильного энкодера для любого приложения пользователь также должен учитывать шум и длину кабеля.Длинные кабели более чувствительны к шуму. Крайне важно использовать кабели правильной длины, чтобы обеспечить правильную работу системы. Рекомендуется использовать экранированные кабели с витой парой, предпочтительно с низким значением емкости. Рейтинг значения емкости обычно указывается в емкости на фут. Этот рейтинг важен для четко определенных прямоугольных импульсов на выходе энкодера, а не для «зубчатых» или «пилообразных» импульсов, подобных импульсам из-за шумовых помех.
Индексный канал
Индексный канал является дополнительным выходным каналом, который обеспечивает выходной импульс один раз за оборот.Этот импульс позволяет пользователю отслеживать положение и устанавливает контрольную точку. Этот выходной канал чрезвычайно полезен для инкрементальных энкодеров, когда происходит прерывание питания. В случаях сбоя питания последний устойчивый индексный канал может использоваться в качестве эталонного маркера для точки перезапуска. Следовательно, когда такое происходит, индексный канал может оказаться весьма ценным в приложениях, использующих инкрементальные кодировщики. У абсолютных энкодеров нет проблем с потерей позиции в случае потери питания, потому что каждой позиции назначается уникальная битовая конфигурация.
Крышка/основание
Варианты крышки и основания учитываются в зависимости от требований конкретного применения. Варианты закрытой крышки помогают защитить энкодер от частиц пыли. Варианты основания играют важную роль в средах с большой вибрацией. К таким вариантам крепления относятся переносные клеи, которые приклеиваются непосредственно задней стороной энкодера к монтажной поверхности, формованные ушки для непосредственного монтажа. Anaheim Automation также предлагает различные варианты основания для монтажа.
Варианты основания играют важную роль в средах с большой вибрацией. К таким вариантам крепления относятся переносные клеи, которые приклеиваются непосредственно задней стороной энкодера к монтажной поверхности, формованные ушки для непосредственного монтажа. Anaheim Automation также предлагает различные варианты основания для монтажа.
Anaheim Automation предлагает широкий выбор вариантов крышки и основания для удовлетворения ваших потребностей.
Опции крышки:
E-вариант: прилагаемая крышка H-опция: диаметр отверстия
Базовые варианты:
3-оп вариант: все пять дырных диаметров становятся .125 A-опция: добавляет выравнивание
г- Опция: формованные ушки Опция R: переходная пластина с 3 слотами Опция T: клей для переноса
Как установить энкодер
После выбора подходящего двигателя важно знать, как правильно его установить.Установка каждого энкодера зависит от варианта его монтажа или основания. Если энкодер должен быть установлен на валу двигателя, то можно использовать центрирующий инструмент для совмещения отверстия энкодера с валом. Различные варианты монтажа имеют разные функциональные возможности. Опция R допускает люфт движения +/- 15 градусов, при котором энкодер может вращаться вперед и назад. Однако T-вариант использует клей для приклеивания к задней части двигателя.
Если энкодер должен быть установлен на валу двигателя, то можно использовать центрирующий инструмент для совмещения отверстия энкодера с валом. Различные варианты монтажа имеют разные функциональные возможности. Опция R допускает люфт движения +/- 15 градусов, при котором энкодер может вращаться вперед и назад. Однако T-вариант использует клей для приклеивания к задней части двигателя.
Пошаговые инструкции по установке кодировщика Anaheim Automation см. здесь.Anaheim Automation также предоставляет возможность добавления энкодера, где мы монтируем энкодер для вас без проблем!
Преимущества энкодера
— Высокая надежность и точность
— Недорогая обратная связь
— Высокое разрешение
— Встроенная электроника
— Объединение оптических и цифровых технологий
— Возможность интеграции в существующие приложения
— Компактный размер
Недостатки энкодера
— Подвержен магнитным или радиопомехам (магнитные энкодеры)
— Прямые помехи от источника света (оптические энкодеры)
— Подвержен загрязнениям, маслам и пыли
Поиск и устранение неисправностей
ОБРАТИТЕ ВНИМАНИЕ: Техническая помощь по линейке энкодеров, а также по всем продуктам, производимым или распространяемым Anaheim Automation, предоставляется бесплатно. Эта помощь предлагается, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. Однако любой выбор, ценовое предложение или предложение по применению энкодера или любого другого продукта, предлагаемые персоналом Anaheim Automation, ее представителями или дистрибьюторами, предназначены только для помощи покупателю. Во всех случаях определение пригодности пользовательского энкодера для конкретного проекта системы является исключительно ответственностью заказчика. Несмотря на то, что прилагаются все усилия, чтобы дать исчерпывающие рекомендации относительно продуктовой линейки Encoder, а также других продуктов для управления движением, а также для точного предоставления технических данных и иллюстраций, такие рекомендации и документы предназначены только для справки и могут быть изменены без предварительного уведомления.
Эта помощь предлагается, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. Однако любой выбор, ценовое предложение или предложение по применению энкодера или любого другого продукта, предлагаемые персоналом Anaheim Automation, ее представителями или дистрибьюторами, предназначены только для помощи покупателю. Во всех случаях определение пригодности пользовательского энкодера для конкретного проекта системы является исключительно ответственностью заказчика. Несмотря на то, что прилагаются все усилия, чтобы дать исчерпывающие рекомендации относительно продуктовой линейки Encoder, а также других продуктов для управления движением, а также для точного предоставления технических данных и иллюстраций, такие рекомендации и документы предназначены только для справки и могут быть изменены без предварительного уведомления.
Проблема: Нет вывода
Решение: Отсутствие вывода может быть результатом различных факторов. Могут быть предприняты шаги для обеспечения надлежащего функционирования кодировщика. Никакое механическое движение не приводит к выдаче какого-либо сигнала от энкодера. Чтобы устранить эту проблему, посмотрите, вращается ли энкодер. Убедитесь, что все перемычки между энкодером и драйвером/контроллером правильные и используется соответствующий источник питания. Плохие соединения или неправильное напряжение питания могут привести к неправильной работе энкодера.Наконец, убедитесь, что для вашего приложения используется правильный тип сигнала (например, открытый коллектор, подтягивающий, драйвер линии или двухтактный). Если проблема не устранена, поменяйте местами кодировщики, если это возможно, чтобы определить, не в кодировщике ли проблема.
Никакое механическое движение не приводит к выдаче какого-либо сигнала от энкодера. Чтобы устранить эту проблему, посмотрите, вращается ли энкодер. Убедитесь, что все перемычки между энкодером и драйвером/контроллером правильные и используется соответствующий источник питания. Плохие соединения или неправильное напряжение питания могут привести к неправильной работе энкодера.Наконец, убедитесь, что для вашего приложения используется правильный тип сигнала (например, открытый коллектор, подтягивающий, драйвер линии или двухтактный). Если проблема не устранена, поменяйте местами кодировщики, если это возможно, чтобы определить, не в кодировщике ли проблема.
Проблема: Невозможно найти импульс индекса
Решение: Импульс индекса, или эталонный маркер, является выходным сигналом энкодера один раз за оборот и лучше всего определяется с помощью осциллографа. Убедитесь, что вся проводка между энкодером и драйвером/контроллером исправна и используется соответствующий источник питания. Если это не решит проблему, попробуйте уменьшить число оборотов двигателя, так как драйвер/контроллер может не определить индексный импульс при очень высоких значениях числа оборотов.
Если это не решит проблему, попробуйте уменьшить число оборотов двигателя, так как драйвер/контроллер может не определить индексный импульс при очень высоких значениях числа оборотов.
Проблема: Выход счетчика указывает неправильное направление
Решение: Если выход счетчика указывает неправильное направление, проверьте конфигурацию проводов. Посмотрите, не перепутаны ли провода. Если они перепутаны, просто поменяйте местами провода.
ПРИМЕЧАНИЕ. Если в приложении используется индекс, изменение конфигурации проводников на противоположное приводит к изменению выравнивания ссылок.Если это так, пожалуйста, внесите соответствующие изменения в свое приложение.
Проблема: Энкодер не вращается
Решение: Когда энкодеры находятся на открытом воздухе, вокруг вала могут скапливаться частицы пыли и мусора. Просто очистите открытую область и убедитесь, что никакие предметы не мешают вращению энкодера.
Проблема: Шумовые помехи
Решение: Для повышения помехозащищенности энкодеров настоятельно рекомендуется, чтобы никакое другое электрическое оборудование не находилось поблизости или не находилось на достаточном расстоянии. Кабели энкодера также должны быть экранированы, а соответствующие провода должны быть заземлены, чтобы свести к минимуму электрические помехи.
Кабели энкодера также должны быть экранированы, а соответствующие провода должны быть заземлены, чтобы свести к минимуму электрические помехи.
Проблема: Искаженный или неправильный выходной сигнал
Решение: Искаженный или неправильный выходной сигнал может быть вызван любой комбинацией ненадежных проводных соединений, выхода энкодера, несовместимого с драйвером/контроллером, электрических помех или неправильной настройки. Проверьте проводные соединения, проблемы совместимости с энкодером и драйвером/контроллером, соосность энкодера и вала, чтобы решить эту проблему.-1 = дюйм на импульс
Глоссарий
Абсолютный энкодер — определяет положение вала в битовой конфигурации и способен поддерживать или обеспечивать абсолютное положение даже после случаев потери/сбоя питания.
Точность – разница в расстоянии между теоретической и фактической позицией.
Циклов на оборот (CPR) — Число циклов на оборот — это количество выходных импульсов за полный оборот диска энкодера.
Энкодер — это датчик механического движения, генерирующий цифровые сигналы в ответ на движение.
Инкрементальный энкодер — устройство, обеспечивающее последовательность импульсов в ответ на механическое движение. Выход этого энкодера имеет форму прямоугольной волны.
Индекс — отдельный выходной канал, обеспечивающий одиночный импульс на оборот вала. Его можно использовать для
установить ориентир или маркер для исходной позиции.
Интерполяция — способ увеличения разрешения энкодера. Этот метод позволяет кодировщику производить выходные данные с более высоким разрешением без увеличения общего размера диска и кодировщика.
Линейный драйвер — это исходный выход. Это означает, что в состоянии «ВКЛ.» линейный драйвер будет подавать Vcc, а в состоянии «ВЫКЛ.» драйвер будет плавающим. Для приложений линейного драйвера требуется входной сигнал.
Открытый коллектор — стоковой выход. В состоянии «ВЫКЛ» открытый коллектор будет заземлен, а в состоянии «ВКЛ» открытый коллектор будет плавать. Вход источника требуется для приложений с открытым коллектором.
Вход источника требуется для приложений с открытым коллектором.
Импульсов на оборот (PPR) — общее количество импульсов, производимых за полный оборот вала энкодера.
Двухтактный — это комбинация драйвера линии и открытого коллектора. В состоянии «ВЫКЛ.» он будет заземлен, а в состоянии «ВКЛ.» подаст напряжение Vcc.
Квадратурный энкодер — два выходных канала сдвинуты по фазе на 90 электрических градусов. По разности фаз также можно определить направление вращения.
Разрешение – количество строковых приращений на диске. Разрешение для инкрементных энкодеров часто называют числом циклов на разрешение, а для абсолютных энкодеров — битами.
Одноканальный энкодер – имеет только один выходной канал и используется для измерения скорости.
Прямоугольная волна — повторяющаяся форма волны, соответствующая высоким и низким сигналам.
Тест кодировщика
1. Для чего используются инкрементальные энкодеры с одним выходным каналом?
A. Определение направления
Определение направления
B. Определение скорости (тахометры)
C. Обратная связь по положению
2. Что из следующего НЕ является различием между абсолютным и инкрементным энкодером?
А.Абсолютные энкодеры обеспечивают уникальное положение.
B. В абсолютных энкодерах используются концентрические круги на прозрачном диске, а в инкрементальных энкодерах используются равномерно расположенные непрозрачные участки для определения движения.
C. И абсолютные энкодеры, и инкрементальные энкодеры теряют положение из-за потери/сбоя питания.
3. Что из следующего относится к индексному каналу?
A. Устройство отслеживания положения
B. Опорная точка/точка самонаведения
C. Определение расстояния
D. Все вышеперечисленное
4.Что делает кодировщик?
А. Ощущает механическое движение.
B. Предоставляет информацию о положении, скорости и направлении.
C. Преобразует аналоговую информацию в цифровую.
D. Ничего из вышеперечисленного.
E. Все вышеперечисленное.
5. Что означает СЛР?
A. Число циклов на оборот
B. Количество циклов на оборот
C. И A, и B
D. Ничего из вышеперечисленного.
6. Ниже опишите различные типы выходов энкодера.
TTL — — это схемы логических вентилей, предназначенные для ввода и вывода двух типов состояний сигнала: высокого (1) и низкого (0). Переход между высокими и низкими сигналами генерирует прямоугольные выходные сигналы TTL.
Открытый коллектор — является стоковым выходом. В состоянии «ВЫКЛ» открытый коллектор будет заземлен, а в состоянии «ВКЛ» открытый коллектор будет плавать. Вход источника требуется для приложений с открытым коллектором.
Драйвер линии — является исходным выходом.Это означает, что в состоянии «ВКЛ.» линейный драйвер будет подавать Vcc, а в состоянии «ВЫКЛ.» драйвер будет плавающим. Для приложений линейного драйвера требуется входной сигнал.
Push-Pull — представляет собой комбинацию драйвера линии и открытого коллектора. В состоянии «ВЫКЛ.» он будет заземлен, а в состоянии «ВКЛ.» подаст напряжение Vcc.
7. Что из следующего является преимуществом энкодера?
A. Низкая стоимость
B. Высокое разрешение
C. Высокая надежность и точность
D.Компактный размер
E. Интеграция оптических и цифровых технологий
F. Все вышеперечисленное
8. На сколько электрических градусов сдвинуты по фазе квадратурные каналы?
А. 45
Б. 120
В. 60
Г. 90
9. Перечислите критерии выбора энкодера:
1. Выход
2. Требуемое разрешение (CPR)
3. Шум и длина кабеля
4. Индексный канал
5.-1 = 0,000767 дюйма на импульс
Часто задаваемые вопросы по энкодеру
В: Что такое энкодер?
A: Энкодер — это датчик механического движения, генерирующий цифровые сигналы в ответ на движение.
В: Как установить кодировщик?
A: Чтобы просмотреть пошаговые руководства по установке кодировщиков Anaheim Automation, щелкните здесь.
В: В чем разница между абсолютными и инкрементными энкодерами?
A: Абсолютный и инкрементальный энкодеры различаются двумя способами:
— Каждое положение абсолютного энкодера уникально
— Абсолютный энкодер никогда не теряет свое положение из-за потери питания или сбоя.Инкрементальные энкодеры теряют отслеживание положения при потере питания или сбое
В: Что такое канал?
A: Канал — это электрический выходной сигнал энкодера.
В: Что такое квадратура?
A: Квадратура имеет два выходных канала с повторяющимися прямоугольными импульсами, которые сдвинуты по фазе на 90 электрических градусов. По разности фаз также можно определить направление вращения.
В: Что такое индексный импульс?
A: Индексный импульс, также называемый эталонным или маркерным импульсом, представляет собой одиночный выходной импульс, формируемый один раз за оборот.
В: Какие еще существуют типы технологий кодирования?
A: Существует два типа технологий кодирования.
— Оптическая: в этом типе технологии используется свет, попадающий на фотодиод через прорези в металлическом/стеклянном диске.
— Магнитный: полоски намагниченного материала размещаются на вращающихся дисках и воспринимаются датчиками на эффекте Холла или магниторезистивными датчиками.
В: В каких типах приложений реализованы кодировщики?
A: Они часто используются в шаговых двигателях, автоматике, робототехнике, медицинских устройствах, управлении движением и многих других приложениях, требующих обратной связи по положению.
В: Работает ли какой-либо диск энкодера (кодовое колесо) с любым модулем энкодера?
A: Нет, каждое разрешение и каждый диаметр диска работают с другим модулем кодировщика.
В: Что такое PPR?
A: PPR обозначает импульс на оборот при вращательном движении для вращательного движения и импульс на дюйм или миллиметр для линейного движения.
В: Когда в инкрементальном энкодере можно использовать один выходной канал?
A: Один выходной канал для инкрементного энкодера можно использовать, когда определение направления не важно.Такие приложения используют тахометры.
В: Будет ли Anaheim Automation устанавливать энкодер на двигатели?
A: Да, будет создан специальный номер детали для включения энкодера, прикрепленного к двигателю.
Необходимое обслуживание
Кодировщики
требуют минимального обслуживания благодаря своей прочности и надежности. Однако рекомендуется свести к минимуму воздействие на энкодеры частиц пыли или мусора, а также, если они не предназначены для воздействия воды или влаги.Кроме того, под воздействием ударов и вибраций диски энкодера могут поцарапаться, что приведет к выходу из строя энкодера. В этом случае может потребоваться замена диска для обеспечения точных показаний.
Вопросы окружающей среды для энкодера
На всех этапах эксплуатации, обслуживания и ремонта энкодера необходимо соблюдать следующие соображения по охране окружающей среды и технике безопасности. Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании энкодера.Обратите внимание, что даже с хорошо сконструированным энкодером изделия, эксплуатируемые и установленные ненадлежащим образом, могут быть опасными. Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. В конечном счете ответственность за правильный выбор, установку и эксплуатацию энкодера несет заказчик.
Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании энкодера.Обратите внимание, что даже с хорошо сконструированным энкодером изделия, эксплуатируемые и установленные ненадлежащим образом, могут быть опасными. Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. В конечном счете ответственность за правильный выбор, установку и эксплуатацию энкодера несет заказчик.
Атмосфера, в которой используется энкодер, должна соответствовать общепринятым правилам обращения с электрическим/электронным оборудованием. Не используйте энкодер в присутствии легковоспламеняющихся газов, пыли, масла, паров или влаги.При использовании на открытом воздухе энкодер должен быть защищен от непогоды соответствующим кожухом, но при этом должен быть обеспечен достаточный приток воздуха и охлаждение. Влага может привести к поражению электрическим током и/или поломке системы. Должное внимание следует уделять избеганию жидкостей и паров любого рода. Свяжитесь с заводом-изготовителем, если для вашего приложения требуются определенные рейтинги IP. Целесообразно устанавливать энкодер в среде, свободной от конденсата, пыли, электрических помех, вибрации и ударов.
Свяжитесь с заводом-изготовителем, если для вашего приложения требуются определенные рейтинги IP. Целесообразно устанавливать энкодер в среде, свободной от конденсата, пыли, электрических помех, вибрации и ударов.
Кроме того, желательно работать с энкодерами в нестатической защищенной среде. Открытые схемы всегда должны быть должным образом ограждены и/или закрыты, чтобы предотвратить несанкционированный контакт человека с цепями под напряжением. Во время подачи питания нельзя выполнять никаких работ. Не подключайте и не отключайте разъемы при включенном питании. Подождите не менее 5 минут, прежде чем проводить осмотр энкодера после отключения питания, потому что даже после отключения питания во внутренней цепи схемы энкодера все еще остается некоторая электрическая энергия.
Планируйте установку энкодера в конструкции системы, свободной от мусора, такого как металлические частицы от резки, сверления, нарезания резьбы и сварки, или любые другие посторонние материалы, которые могут соприкасаться с схемой.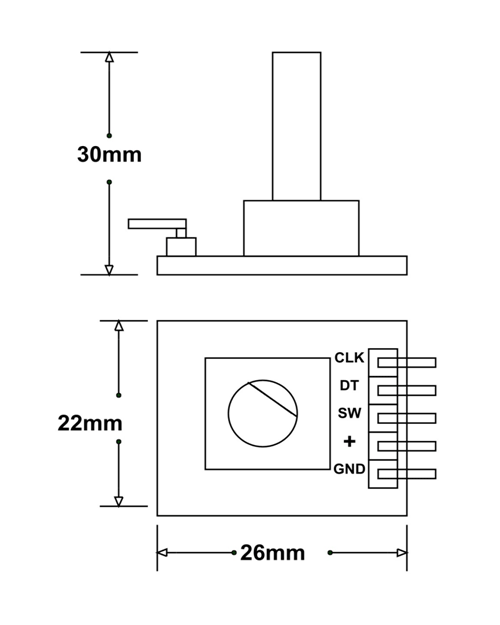 Если не предотвратить попадание мусора в энкодер, это может привести к повреждению и/или удару.
Если не предотвратить попадание мусора в энкодер, это может привести к повреждению и/или удару.
Срок службы энкодера
Срок службы энкодера зависит от различных факторов, таких как воздействие окружающей среды и использование приложений.Ограничивая воздействие на энкодер электрического оборудования, температуры выше рекомендуемых значений, конденсации, вибрации и ударов, а также используя энкодер в соответствии с указаниями производителя, можно продлить срок службы энкодера.
Принадлежности
Наряду с линейкой энкодеров, Anaheim Automation предлагает полную линейку несимметричных и дифференциальных кабелей энкодеров с четырьмя, шестью и восемью проводами, кабелями длиной до 16 футов и инструментами для центрирования энкодеров.Кроме того, Anaheim Automation предлагает расширенную линейку шаговых, бесщеточных и серводвигателей, которые можно использовать с энкодерами для нужд вашего приложения.
Типы поворотных, линейных, позиционных и оптических энкодеров
Изображение предоставлено Мати Нусерм/Shutterstock. com
com
Кодировщики — это чувствительные устройства, целью которых является обеспечение обратной связи о движении объектов для систем управления. Эта обратная связь позволяет системе управления установить, правильно ли перемещается или позиционируется отслеживаемый объект, и позволяет выполнять корректировки или предпринимать действия на основе движения и положения объекта.
Кодировщики
обычно используются для измерения одного или нескольких конкретных параметров объекта, таких как его скорость, положение, направление, или для обеспечения подсчета объекта или некоторого связанного значения. Простой пример того, как можно использовать кодер, — это приложение для обрезки по размеру. Представьте себе операцию резки или станок, предназначенный для регулярного производства материала определенной фиксированной длины. Сырье, такое как ткань, непрерывно подается в машину с катушки. Машина должна определить, когда материал нужной длины был подан с катушки на конвейер машины, а затем дать указание режущему лезвию пройти по материалу точно в нужный момент, чтобы получить материал нужной длины. .Энкодер используется в таких приложениях, как это, чтобы сообщить схеме управления станком, когда делать разрез.
.Энкодер используется в таких приложениях, как это, чтобы сообщить схеме управления станком, когда делать разрез.
В этой статье будут рассмотрены различные типы энкодеров, дано общее представление об их функционировании, а также представлена информация по выбору и важные характеристики.
Типы энкодеров
Существует несколько различных способов характеристики энкодеров для приложений управления движением. Наиболее распространенный подход состоит в том, чтобы охарактеризовать эти устройства по типу контролируемого движения, будь то линейное (прямолинейное) или вращательное.Тремя наиболее распространенными типами энкодеров являются линейные энкодеры, угловые энкодеры и угловые энкодеры.
Линейные энкодеры
Линейные энкодеры имеют дело с перемещением объектов по траектории или линии, например, в упомянутом ранее приложении для резки по заданной длине. Этот тип энкодера использует датчик для измерения движения или расстояния между двумя точками, иногда с использованием кабеля (большие расстояния) или небольшого стержня (меньшие расстояния). В этих случаях кабель прокладывается между преобразователем энкодера и движущимся объектом.Когда объект движется, преобразователь собирает данные с кабеля и выдает аналоговый или цифровой выходной сигнал, который используется для определения движения или положения объекта.
В этих случаях кабель прокладывается между преобразователем энкодера и движущимся объектом.Когда объект движется, преобразователь собирает данные с кабеля и выдает аналоговый или цифровой выходной сигнал, который используется для определения движения или положения объекта.
Энкодеры
Датчики вращения используются для обеспечения обратной связи о движении вращающегося объекта или устройства, например вала двигателя. Энкодер преобразует угловое положение движущегося вала в аналоговый или цифровой выходной сигнал, который затем позволяет системе управления установить положение или скорость вала.
Угловые энкодеры могут содержать валы или могут иметь конструкцию, известную как энкодеры со сквозным отверстием, что означает, что они могут быть установлены непосредственно на вершине вращающегося вала, такого как вал двигателя. Энкодеры со сквозным отверстием доступны в различных размерах и имеют варианты крепления с помощью зажима или установочного винта, что делает их пригодными для крепления в приложениях проектирования машин. Фланцы используются для позиционирования энкодера и предотвращения его вращения вместе с движущимся валом.
Фланцы используются для позиционирования энкодера и предотвращения его вращения вместе с движущимся валом.
Датчики угла
Угловые энкодеры
похожи на угловые энкодеры в том, что они отслеживают и обеспечивают обратную связь по вращательному движению, но они отличаются тем, что угловые энкодеры, как правило, обеспечивают более высокую точность.
Абсолютные и инкрементальные энкодеры
Как линейные, так и угловые энкодеры доступны как в абсолютном, так и в инкрементном энкодерах, что описывает желаемый выходной сигнал для энкодера. При использовании абсолютного энкодера выходной сигнал, генерируемый устройством, представляет собой уникальный набор цифровых битов, соответствующих определенному положению измеряемого объекта. Даже при отключении питания абсолютный энкодер по своей конструкции может определять положение объекта, поскольку с каждым положением связан определенный цифровой сигнал.
Абсолютные угловые энкодеры
доступны как в однооборотном, так и в многооборотном исполнении. Однооборотные энкодеры способны предоставлять информацию в пределах одного оборота вала. Многооборотные энкодеры способны предоставлять информацию о положении на протяжении многих оборотов положения вала, даже большого количества оборотов.
Однооборотные энкодеры способны предоставлять информацию в пределах одного оборота вала. Многооборотные энкодеры способны предоставлять информацию о положении на протяжении многих оборотов положения вала, даже большого количества оборотов.
Абсолютные энкодеры
используются в приложениях, где важно знать точное положение объекта. Они также используются в ситуациях, когда машина или процесс бездействует в течение большого процента времени или движется очень медленно.
Инкрементальные энкодеры используют более простой метод подсчета движения и полагаются на определение положения объекта путем подсчета количества импульсов, а затем используют этот счет для вычисления положения. Поскольку они основаны на подсчете импульсов, нет уникальной цифровой подписи, которую можно использовать для определения абсолютного положения. Следовательно, в случае потери питания инкрементальные энкодеры должны быть привязаны к исходному положению или контрольной точке, чтобы счетчик можно было сбросить, а затем использовать для вычисления относительного перемещения. Один из способов представить разницу состоит в том, что инкрементальные энкодеры измеряют относительное перемещение относительно некоторой точки отсчета, тогда как абсолютные энкодеры измеряют положение напрямую, используя уникальный код сигнала, который непосредственно отражает положение.
Один из способов представить разницу состоит в том, что инкрементальные энкодеры измеряют относительное перемещение относительно некоторой точки отсчета, тогда как абсолютные энкодеры измеряют положение напрямую, используя уникальный код сигнала, который непосредственно отражает положение.
Технологии датчиков энкодера
Существует несколько различных технологий обнаружения, которые можно использовать в кодере для обнаружения движения или положения. Наиболее распространенные технологии датчиков, которые используются в конструкциях энкодеров, включают:
- Оптический
- Магнитный
- Емкостный
Оптические энкодеры
Оптические энкодеры являются наиболее точными из всех методов измерения.Вращающийся оптический энкодер состоит из источника света, такого как светодиод, и вращающегося диска, на котором нанесен ряд непрозрачных линий и чередующихся полупрозрачных прорезей. Когда свет проходит через вращающийся диск, фотодатчик, установленный на противоположной стороне диска, улавливает свет и генерирует синусоидальный электрический сигнал, который соответствует наличию света, обнаруживаемого в полупрозрачных щелях, и отсутствию света в непрозрачных линиях. Затем электрическая цепь преобразует синусоидальный сигнал в сигнал прямоугольной формы, который представляет собой серию высоких и низких импульсов.Эти импульсы отправляются в схему управления, которая может использоваться для измерения количества импульсов при вращении энкодера и использования этих данных для определения положения вращающегося вала или для управления некоторыми действиями на основе движения или положения.
Затем электрическая цепь преобразует синусоидальный сигнал в сигнал прямоугольной формы, который представляет собой серию высоких и низких импульсов.Эти импульсы отправляются в схему управления, которая может использоваться для измерения количества импульсов при вращении энкодера и использования этих данных для определения положения вращающегося вала или для управления некоторыми действиями на основе движения или положения.
Магнитные энкодеры
Магнитные энкодеры основаны на обнаружении изменения магнитного потока для определения движения и положения объекта. Магнитный поворотный энкодер состоит из намагниченного диска с рядом магнитных полюсов, расположенных по его окружности.Датчик расположен рядом с диском, и когда диск вращается, датчик обнаруживает изменение магнитного поля, поскольку различные полюса на поверхности диска проходят рядом с датчиком. Изменяющееся магнитное поле используется для генерации синусоидального выходного сигнала, который может быть преобразован в прямоугольный импульс для подсчета схемой управления. Датчик, используемый в этих энкодерах, может либо использовать эффект Холла, который обнаруживает изменение напряжения, либо может быть магниторезистивным датчиком, который может непосредственно обнаруживать изменение магнитного поля.
Датчик, используемый в этих энкодерах, может либо использовать эффект Холла, который обнаруживает изменение напряжения, либо может быть магниторезистивным датчиком, который может непосредственно обнаруживать изменение магнитного поля.
Емкостные энкодеры
Емкостные энкодеры представляют собой относительно новую технологию датчиков для проектирования энкодеров. Принцип работы основан на обнаружении изменения емкости с помощью высокочастотного опорного сигнала. Например, в поворотном емкостном энкодере для кодирования сигнала используется трехкомпонентная компоновка: стационарный передатчик, ротор и стационарный приемник. Передатчик генерирует высокочастотный электрический сигнал или ток, который проходит через ротор к приемнику.Синусоидальный рисунок, отштампованный на металлическом роторе, модулирует сигнал переменного тока по мере вращения ротора, а приемник преобразует модулированный сигнал в серию выходных импульсов, которые можно использовать для установления приращений вращательного движения. Ротор создает изменяющееся емкостное сопротивление между сигналом, генерируемым передатчиком, и металлом на роторе, что вызывает предсказуемые и повторяющиеся искажения в поле переменного тока.
Ротор создает изменяющееся емкостное сопротивление между сигналом, генерируемым передатчиком, и металлом на роторе, что вызывает предсказуемые и повторяющиеся искажения в поле переменного тока.
Квадратурные энкодеры
Хотя одноканальные энкодеры могут использоваться для определения движения и движения, они имеют недостаток, заключающийся в том, что они не могут определить направление движения.В поворотном энкодере, например, движение по часовой стрелке будет генерировать тот же выходной сигнал, что и движение против часовой стрелки, поэтому электрический выход энкодера не может определять направление вращения, а только величину движения. Этот недостаток можно устранить, используя так называемый квадратурный энкодер.
Квадратурные энкодеры
используют два выходных канала, электрические выходные сигналы которых не совпадают по фазе. Для этого кодовый диск внутри квадратурного энкодера будет содержать две дорожки — по одной для каждого из двух сигнальных каналов A и B. Кодирование этих дорожек на кодовом диске таково, что при генерации сигналов (скажем, с помощью оптического источника света) импульс прямоугольной формы из канала А электрически не совпадает по фазе на 90 o с импульсом прямоугольной формы из канала В. Например, в случае поворотного энкодера, который вращается в направлении по часовой стрелке, прямоугольные импульсы канала A будут опережать импульсы канала B, а когда направление вращения переключается на вращение против часовой стрелки, импульсы канала B будут опережать импульсы канала B. те канала А.Таким образом, использование двух сигнальных каналов, сдвинутых по фазе, позволяет схеме управления, получающей выходные импульсы энкодера, различать направленность движения. Тот же принцип применим к энкодерам линейного движения.
Кодирование этих дорожек на кодовом диске таково, что при генерации сигналов (скажем, с помощью оптического источника света) импульс прямоугольной формы из канала А электрически не совпадает по фазе на 90 o с импульсом прямоугольной формы из канала В. Например, в случае поворотного энкодера, который вращается в направлении по часовой стрелке, прямоугольные импульсы канала A будут опережать импульсы канала B, а когда направление вращения переключается на вращение против часовой стрелки, импульсы канала B будут опережать импульсы канала B. те канала А.Таким образом, использование двух сигнальных каналов, сдвинутых по фазе, позволяет схеме управления, получающей выходные импульсы энкодера, различать направленность движения. Тот же принцип применим к энкодерам линейного движения.
Инкрементальные квадратурные энкодеры часто добавляют дополнительный сигнальный канал, называемый маркером или индексом, который служит для установления контрольной точки, которую затем можно использовать для определения положения, а также направления движения.
Соображения по выбору
Выбор кодировщика требует понимания условий окружающей среды приложения и желаемых уровней производительности.Ниже приведены некоторые соображения по выбору, которые следует учитывать при принятии решения о выборе источника кодировщика.
- Какой тип движения отслеживается – линейное или вращательное?
- Какие параметры измеряются – положение, скорость движения?
- Важна ли запись направления? – это поможет установить, будет ли достаточно одноканального кодера или потребуется многоканальный кодер.
- Каковы конкретные условия окружающей среды, которым будет подвергаться энкодер? – это поможет определить наиболее подходящую технологию измерения для энкодера.Это включает потенциальное воздействие:
- Пыль
- Влага
- Едкие или коррозионно-активные химические вещества
- Шок
- Вибрация
- Экстремальные температуры
- Может ли предполагаемое приложение выполнить возврат в исходное положение в случае потери питания? Это поможет установить потребность в инкрементальных и абсолютных энкодерах.
- Какое разрешение необходимо для измерения?
- Каковы электрические требования к системе? – это включает рассмотрение выходного интерфейса, такого как интерфейсы «точка-точка», интерфейсы полевой шины или интерфейсы Ethernet.
- Какая механическая упаковка и конструкция подходят для применения? – для поворотных приводов это включает в себя выбор энкодера со сквозным отверстием или валом, тип механизма блокировки, размер отверстия, а также то, какой энкодер лучше: герметичный или открытый.
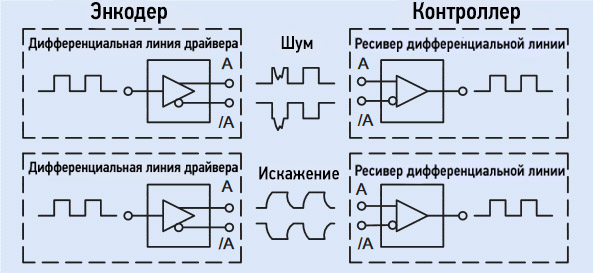
Резюме
В этой статье были рассмотрены различные типы энкодеров, технологии их считывания и рекомендации по выбору. Для получения информации по другим темам обратитесь к нашим дополнительным руководствам или посетите платформу поиска поставщиков Thomas, где вы можете найти потенциальные источники поставок для более чем 70 000 различных категорий продуктов и услуг.Для более подробного ознакомления с другими вариантами энкодеров, такими как инкрементальные или абсолютные оптические энкодеры угла наклона вала, см. нашу соответствующую статью о энкодерах угла поворота вала .
нашу соответствующую статью о энкодерах угла поворота вала .
Источники:
- https://www.heidenhain.us/
- https://www.arrow.com/
- http://encoder.com/blog/company-news/what-is-an-encoder/
- https://lastminuteengineers.com/rotary-encoder-arduino-tutorial/
- https://cdn.automationdirect.com/static/press/encoder-white-paper.пдф
- https://www.cuidevices.com/product-spotlight/capacitive-absolute-encoders
- https://www.machinedesign.com/
- https://www.motioncontrolonline.org/
- https://www.dynapar.com/
- http://www.rae.ca/wp-content/uploads/EncoderSelectionGuide.pdf
- https://trelectronic.com/
Прочие кодировщики Артикул
Прочие «Типы» изделий
Больше из раздела Автоматизация и электроника
Принцип работы поворотного энкодера.- Новости и информация
Что касается проблемы позиционирования в промышленном управлении, обычно используются бесконтактные переключатели, фотоэлектрические переключатели и другие устройства. С непрерывным развитием промышленного управления появился поворотный энкодер. Его характеристики:
С непрерывным развитием промышленного управления появился поворотный энкодер. Его характеристики:
1. Информатизация: помимо позиционирования диспетчерская может также знать свое конкретное местоположение;
2. Гибкость: позиционирование можно гибко настроить в диспетчерской;
3.Удобный монтаж и безопасность, долгий срок службы.
Энкодер может измерять расстояния от нескольких микрон до десятков сотен метров. Несколько рабочих положений, если выбрать поворотный энкодер, позволяют избежать использования более близкого к переключателям, фотоэлектрическим переключателям, решить проблемы с механической установкой, легко повредить, а также от высокой температуры, влаги и других проблем.
Из-за диска с оптическим кодом механические потери отсутствуют, если положение установки точное, срок его службы часто очень велик.
4. Многофункциональность: в дополнение к позиционированию, он также может передавать текущую позицию далеко от текущей позиции, а скорость преобразования очень важна для применения преобразователя частоты и шагового двигателя.
5. Экономия: для нескольких станций управления требуется только один поворотный энкодер, а затраты на установку, обслуживание и потери снижаются, а срок службы увеличивается.
Ввиду вышеперечисленных преимуществ энкодер широко используется в различных ситуациях промышленного управления.
Кодер — это устройство, которое преобразует физические сигналы в сигналы, которые можно использовать для связи, передачи и хранения. Детекторный элемент, применяемый в системе управления скоростью или позиционированием.
Энкодер представляет собой устройство для преобразования углового или линейного смещения в электрические сигналы. Первый становится кодовым диском, второй – мерилом.
Энкодер – это устройство для измерения скорости. Он разделен на один выход и двойной выход.Технические параметры в основном включают количество импульсов (от десятков до тысяч), напряжение питания и т.д. Одноканальный выход относится к выходу поворотного энкодера, представляющему собой набор импульсов, а двойной выходной поворотный энкодер разность фаз выходного импульса составляет 90 градусов, две группы в двух группах импульсов могут не только измерять скорость вращения, но также могут судить о направлении вращения.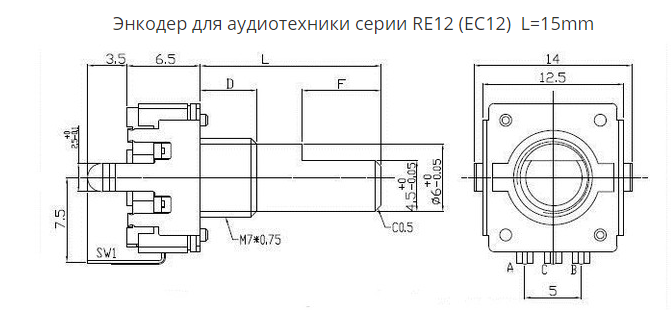 Инкрементальный энкодер (вращающийся) принцип работы:
Инкрементальный энкодер (вращающийся) принцип работы:
Центральный вал светового кодового диска, на котором есть круглая и темная размеченная линия, считывают фотоэлектрические эмиссионные и приемные устройства, получают четыре группы синусоидального сигнала, объединенного в A, B, C, D, каждая синусоида с разницей фаз 90 градусов (в отличие от цикла A 360 градусов), будет реверсировать, сигнал C, D, наложенный на две фазы A, B, может усилить стабильность сигнала; Другой выход импульса фазы Z для представления нулевых эталонных битов.
Из-за разности фаз A, B в 90 градусов, но только через фазу A в первой или фазу B в первой, с прямой и инверсией дискриминантного энкодера, через нулевой импульс можно получить нулевое опорное значение энкодера.
Энкодер кодовый материал диска со стеклом, металлом, пластиком, энкодер в нанесении тонкой разметочной линии на стекло, его термостойкость, высокая точность, металлический энкодер непосредственно к разметочным линиям и непроходимость, несыпучий, но т. к. определенная толщина металла, точность ограничена, его термостойкость на порядок хуже, чем у стекла, пластиковый энкодер экономичен, его стоимость невысока, но точность и термостойкость, ресурс меньше.
к. определенная толщина металла, точность ограничена, его термостойкость на порядок хуже, чем у стекла, пластиковый энкодер экономичен, его стоимость невысока, но точность и термостойкость, ресурс меньше.
Разрешение — количество сквозных или темных линий, предоставляемых энкодером для каждого поворота на 360 градусов, называется разрешением, также известным как аналитическое индексирование, или непосредственно количеством строк, обычно от 5 до 10000 строк на оборот.
Выходной сигнал:
Выходной сигнал имеет синусоидальную форму (ток или напряжение), прямоугольную волну (TTL, HTL), размыкание коллектора (PNP, NPN) и двухтактный в различных формах, где TTL — долгосрочная дифференциальный привод (симметричный A, A-; B, B-; Z, Z-), HTL также известен как двухтактный тип, двухтактный выход, и интерфейс устройства приема сигнала энкодера должен соответствовать энкодеру.
Сигнальное соединение — импульсный сигнал энкодера обычно подключается к счетчику, ПЛК, компьютеру, ПЛК и модулю, подключенному к компьютеру, с низкоскоростным модулем и высокоскоростным модулем, а частота переключения бывает низкой и высокой.
При однофазном подключении используется для счета в одном направлении, измерения скорости в одном направлении.
A.B двухфазное подключение, для положительного и отрицательного счета, положительного и отрицательного направления и измерения скорости.
A, B и Z подключены для измерения положения с коррекцией эталонного бита.
— A, A, B, B -, Z, Z — связи, из-за связи отрицательного сигнала с симметрией, текущее электромагнитное поле для кабеля, вклады в 0, затухание минимальное, антипомеховое, лучше всего может передавать на большое расстояние.
Для энкодера TTL с симметричным отрицательным выходным сигналом дальность передачи сигнала может составлять до 150 метров.
Для энкодера HTL с симметричным отрицательным выходным сигналом расстояние передачи сигнала может достигать 300 метров.
1. По режиму считывания энкодер можно разделить на контактный и бесконтактный.
Тип контакта принимает выход щетки, и одна щетка контактирует с проводящей областью или областью изоляции, чтобы указать, является ли состояние кода «1» или «0»; Бесконтактный чувствительный элемент представляет собой светочувствительный элемент или магнитный датчик, а светочувствительный элемент используется для индикации состояния кода «1» или «0».
2. По принципу работы энкодер можно разделить на два типа: инкрементный и абсолютный.
Инкрементальный энкодер преобразует смещение в периодический электрический сигнал, преобразует электрический сигнал в счетный импульс и ИСПОЛЬЗУЕТ число импульсов для представления смещения.Каждое положение абсолютного энкодера соответствует определенному числовому коду, поэтому его значение связано только с начальной и конечной позицией измерения, а не с промежуточным процессом измерения.
Вращающийся инкрементальный энкодер выдает импульсы при вращении, зная свое местоположение с помощью счетных устройств и подсчитывая внутреннюю память устройства, чтобы запомнить положение, когда энкодер неподвижен или обесточен. Таким образом, после отключения питания не может быть никакого движения, энкодер при звонках работает, в процессе выходного импульса энкодера также не может быть импульсных помех и потерь, в противном случае память счетного устройства нулевого смещения, и сумма смещения не знаю, может знать только неправильно после результатов производства.
Решение состоит в том, чтобы увеличить опорную точку, и энкодер корректирует ячейку памяти счетного устройства для каждой опорной точки. Точность положения не может быть гарантирована до контрольной точки. По этой причине в промышленном контроле есть контрольная точка для каждой операции и метод изменения запуска.
Например, расположение сканера принтера — это принцип инкрементального энкодера, и каждый раз, когда мы его включаем, мы слышим стук чипа, он ищет референтный ноль, а затем работает.
Этот метод проблематичен для некоторых проектов промышленного управления и даже не допускает изменения при запуске (вам нужно знать точное местоположение после запуска), поэтому существует абсолютный энкодер.
Абсолютный поворотный оптический энкодер, потому что его каждое положение только, защита от помех, абсолютно без потери памяти, уже все более и более широко используется в различных промышленных системах измерения угла, длины и позиционирования.
На оптическом диске абсолютного энкодера много строк, за каждой из которых следуют две строки, четыре строки, восемь строк и шестнадцать строк. Расположение, так, в каждом положении энкодера, путем считывания каждой канавки и темноты, получить набор нулевой степени от 2 до 2 n — 1 в степени только двух шестнадцатеричных кодов (код Грея), называется абсолютным энкодер. Такой энкодер определяется механическим положением кодового диска, и на него не влияют сбои питания или помехи.
Расположение, так, в каждом положении энкодера, путем считывания каждой канавки и темноты, получить набор нулевой степени от 2 до 2 n — 1 в степени только двух шестнадцатеричных кодов (код Грея), называется абсолютным энкодер. Такой энкодер определяется механическим положением кодового диска, и на него не влияют сбои питания или помехи.
Абсолютный энкодер определяется по механическому положению уникальности каждого положения, ему не нужна память, не нужно искать точку отсчета, и не всегда считать, когда нужно знать, когда идти читать Это.Таким образом, характеристики защиты от помех кодера и надежность данных значительно улучшаются.
Поскольку абсолютный энкодер лучше инкрементального энкодера в позиционировании, он все больше и больше применяется для управления промышленным положением. Абсолютный энкодер из-за его высокой точности, выходные данные, такие как все еще с использованием параллельного вывода, выходной сигнал должен гарантировать, что каждое соединение очень хорошее, для более сложных условий и изоляции, соединительный кабель немного больше, что доставляет много неудобств и снижает надежность Таким образом, абсолютный энкодер с многобитным типом вывода обычно выбирает последовательный или линейный выход, абсолютный энкодер немецкого производства является наиболее часто используемым последовательным выходом SSI (синхронный последовательный выход).
3. Абсолютный энкодер с одной катушкой и многоконтурный абсолютный энкодер.
Вращающийся абсолютный энкодер с одним кольцом, для измерения оптического энкодера при вращении размеченной линии, чтобы получить единственную кодировку, при вращении более чем на 360 градусов, код обратно в исходное положение, поэтому это не соответствует принципу только абсолютного кодирования, энкодер можно использовать только для поворота на 360 градусов в пределах меры, известной как абсолютный энкодер с одним кольцом.
Если вы хотите измерить вращение более чем на 360 градусов, вам необходимо использовать многоконтурный абсолютный энкодер.
Изготовители энкодеров, использующие принцип шестеренчатых механических часов и часов, когда вращающийся центр кодируют через шестеренчатый привод другого набора энкодеров (или нескольких наборов шестерен, нескольких наборов энкодеров), на основе числа кругов, кодирующего количество кругов до добавьте код, чтобы увеличить диапазон измерения энкодера, абсолютный энкодер называется катушкой более абсолютный энкодер, он также определяется механическим кодированием положения, каждое кодирование местоположения не только повторяется, без памяти.
Другим преимуществом является большее количество кругов энкодера, из-за большого диапазона измерения, который на самом деле часто используется более богатым, поэтому при установке излишне сложно найти, будет среднее положение в качестве отправной точки и значительно упростит трудность установки и отладки.
Преимущества многоконтурного абсолютного энкодера в позиционировании длины очевидны, и все больше и больше применяются в позиционировании промышленного управления.
4. Механическая установка абсолютного углового энкодера:
Механическая установка абсолютного углового энкодера имеет множество форм, таких как установка высокоскоростного терминала, низкоскоростная установка, установка вспомогательного оборудования и так далее.
1) установка клиента: устанавливается на конец вала двигателя (или шестерню), преимуществом этого метода является высокое разрешение, потому что энкодер имеет в 4096 раз больше, количество катушек двигателя в этом диапазоне, он может полностью использовать полный диапазон и улучшить разрешение, недостатком является то, что после перемещения объекта через редуктор заряды имеют ошибку зазора шестерни, обычно используемую для односторонней точности позиционирования, например, для управления зазором прокатного ролика. Кроме того, энкодер устанавливается непосредственно на высокоскоростной терминал, и дрожание двигателя должно быть меньше, иначе энкодер легко повредить.
Кроме того, энкодер устанавливается непосредственно на высокоскоростной терминал, и дрожание двигателя должно быть меньше, иначе энкодер легко повредить.
2) установка нижнего конца: устанавливается на редуктор, например, на конец вала барабана наматывающего каната или на конец вала редуктора последней секции, этот метод не имеет зубчатых зарядов зазора, измерение более прямое, высокая точность, этот метод обычно измеряется позиционирование на большие расстояния, например, все виды подъемного оборудования, позиционирование подающих тележек и т. д.
3) установка вспомогательного оборудования:
Обычное использование зубчатой рейки, цепного ремня, фрикционного колеса, каната и так далее.
5. Особенности оптического энкодера.
Использование технологии индукции отражения для поверхностного монтажа без инкапсуляции штифтов обеспечивает скорость счета двухканального аналогового выходного сигнала: 20 кГц \ использование одного источника питания 5,0 В Рабочая температура: от — 10 до 70 oC Разрешение кодирования: 180 линий на дюйм соответствует стандарту защиты окружающей среды RoHS требования.
Абсолютные поворотные энкодеры | Dynapar
Типы абсолютных энкодеров
Абсолютные энкодеры можно разделить на категории в зависимости от типа их технологии измерения (оптические или магнитные) или их выходного сигнала при нескольких оборотах вала двигателя (однооборотный или многооборотный).
В оптических абсолютных энкодерах используется кодовый диск с маркировкой и светодиод, который освещает кодовый диск. Когда диск вращается вместе с валом двигателя, можно обнаружить изменения положения. В магнитных абсолютных энкодерах оптические маркеры заменены магнитными полюсами, а светодиод заменен массивом магнитных датчиков.
В то время как все абсолютные энкодеры обеспечивают обратную связь, основанную на вращении вала (положение энкодера в пределах 360 градусов или один оборот), приложения различаются в зависимости от требования знать, сколько раз энкодер совершил полный оборот или несколько оборотов.Многооборотные абсолютные энкодеры предлагают дополнительную обратную связь для количества оборотов на 360 градусов.
Узнайте больше об однооборотных и многооборотных абсолютных энкодерах здесь
Как работают абсолютные энкодеры: точность даже в сложных системах
Абсолютный угловой энкодер определяет свое положение, используя статическую опорную точку. Метод немного отличается в зависимости от того, является ли абсолютный поворотный энкодер оптическим или магнитным, но принцип одинаков в любом случае.
Абсолютные энкодеры работают, выдавая цифровое слово битов при вращении вала.Есть два диска, оба с концентрическими кольцами со смещенными маркерами. Один диск закреплен на центральном валу; другой свободно перемещается. По мере вращения диска маркеры на дорожке абсолютных энкодеров меняют положение на неподвижном диске. Каждая конфигурация на диске абсолютного поворотного энкодера представляет собой уникальный двоичный код. Взглянув на двоичный код абсолютного поворотного энкодера, можно определить абсолютное положение объекта. Для оптических абсолютных энкодеров маркер представляет собой отверстие, через которое проходит свет. Для магнитных абсолютных энкодеров маркеры представляют собой массив магнитных датчиков, которые проходят над магнитом и определяют положение магнитных полюсов.
Для магнитных абсолютных энкодеров маркеры представляют собой массив магнитных датчиков, которые проходят над магнитом и определяют положение магнитных полюсов.
Преимущества абсолютных энкодеров
Абсолютные энкодеры обладают уникальными преимуществами по сравнению с инкрементными энкодерами. У них есть уникальный код для каждого положения вала, а это означает, что они могут предоставить очень уникальную информацию о положении, поскольку нет двух одинаковых положений на гусенице. Они измеряют фактическое положение, генерируя поток уникальных цифровых кодов, которые представляют фактическое положение энкодера и, следовательно, не требуют индекса или контрольной точки.Это также дает абсолютным энкодерам преимущество в приложениях, возвращающихся в исходное положение, что может вызвать проблемы в случае потери питания.
Абсолютные энкодеры также предлагают более высокое разрешение по сравнению с инкрементными энкодерами. В то время как инкрементальные энкодеры должны добавлять больше приращений к одной дорожке на кодовом диске и, таким образом, ограничены физическим размером диска и количеством импульсов, которые могут быть декодированы в зависимости от скорости вращения энкодера (частотная характеристика), абсолютные энкодеры добавляют дополнительные дорожки для достижения более высокого разрешения и отсутствия непрерывного вывода потока импульсов. Вместо этого они ограничены количеством запросов энкодеров в течение заданного периода выборки скорости передачи данных.
Узнайте больше об определении разрешения абсолютного энкодера здесь
Альтернативы абсолютному поворотному энкодеру
Если общая простота системы важнее производительности, то существуют альтернативы абсолютным энкодерам, включая инкрементальные энкодеры и преобразователи
Абсолютный энкодер
и резольверы
Резольверы
— это электромеханические предшественники энкодеров, основанные на технологиях времен Второй мировой войны.Электрический ток создает магнитное поле вдоль центральной обмотки. Имеются две обмотки, расположенные перпендикулярно друг другу. Одна обмотка фиксируется на месте, а другая перемещается по мере движения объекта. Изменения в силе и расположении двух взаимодействующих магнитных полей позволяют резольверу определять движение объекта.
Простота конструкции резольвера делает его надежным даже в экстремальных условиях, от низких и высоких температур до воздействия радиации и даже механических помех от вибрации и ударов. Однако щадящий характер распознавателей как для источника, так и для сборки приложений достигается за счет их способности работать в сложных проектах приложений, поскольку они не могут производить данные с достаточной точностью. В отличие от абсолютных энкодеров, резольверы выводят только аналоговые данные, для подключения которых может потребоваться специализированная электроника.
Однако щадящий характер распознавателей как для источника, так и для сборки приложений достигается за счет их способности работать в сложных проектах приложений, поскольку они не могут производить данные с достаточной точностью. В отличие от абсолютных энкодеров, резольверы выводят только аналоговые данные, для подключения которых может потребоваться специализированная электроника.
Узнайте больше о резольверах здесь
Абсолютные энкодеры
и инкрементальные энкодеры
Инкрементальные энкодеры
определяют относительное положение, рассматривая только разницу между измерениями.Механизм кодировщика отправляет импульсы в каналах (называемых квадратурами ), и смещения в этих импульсах указывают на движение.
Инкрементальные энкодеры
обеспечивают превосходную обратную связь по скорости и расстоянию, а поскольку задействовано мало датчиков, системы просты и недороги. Однако инкрементальные энкодеры чувствительны к факторам окружающей среды и могут терять разрешение на высоких скоростях из-за ограничений выходной частоты. Они также ограничены предоставлением только информации об изменении, поэтому кодеру требуется эталонное устройство для расчета движения.
Они также ограничены предоставлением только информации об изменении, поэтому кодеру требуется эталонное устройство для расчета движения.
Узнайте больше об инкрементальных энкодерах здесь
Угловой энкодер — Balluff
Энкодеры Balluff используются везде, где необходимо регистрировать механических значений углов поворота . Обнаруженное движение преобразуется в электрические сигналы , чтобы помочь вам с высокой точностью расположить все важные детали машины. Надежность поворотных энкодеров позволяет использовать даже в экстремальных условиях , например, в пищевой промышленности и упаковке, мобильных рабочих машинах, а также в машиностроении.Здесь вы можете найти правильный энкодер для ваших приложений, будь то абсолютный энкодер или инкрементальный энкодер.
Инкрементальные энкодеры для контроля скорости и определения положения ваших машин и систем
Инкрементальные энкодеры записывают машинные данные по сравнению с последним набором данных. С этой целью контрольные значения определяются каждый раз при включении машин, а, следовательно, и датчиков. Инкрементальные энкодеры выдают точно определенное количество импульсов за оборот.Сигнал служит мерой угла или пройденного расстояния. Чем больше сигналов выдается за один оборот, тем выше разрешение инкрементных энкодеров и тем точнее измерения и управление вашими производственными системами. С помощью наших инкрементных энкодеров вы контролируете и надежно контролируете вращение и скорость ленты ваших машин и систем, но вы также можете использовать их для измерения углов с высоким разрешением . Интерфейсы инкрементных энкодеров включают ABZ, sin/cos, TTL (транзисторно-транзисторная логика) и HTL (логика с высоким порогом), которые соответствуют общепринятым и установленным отраслевым требованиям к интерфейсам.
С этой целью контрольные значения определяются каждый раз при включении машин, а, следовательно, и датчиков. Инкрементальные энкодеры выдают точно определенное количество импульсов за оборот.Сигнал служит мерой угла или пройденного расстояния. Чем больше сигналов выдается за один оборот, тем выше разрешение инкрементных энкодеров и тем точнее измерения и управление вашими производственными системами. С помощью наших инкрементных энкодеров вы контролируете и надежно контролируете вращение и скорость ленты ваших машин и систем, но вы также можете использовать их для измерения углов с высоким разрешением . Интерфейсы инкрементных энкодеров включают ABZ, sin/cos, TTL (транзисторно-транзисторная логика) и HTL (логика с высоким порогом), которые соответствуют общепринятым и установленным отраслевым требованиям к интерфейсам.
Обзор основных функций и преимуществ инкрементного энкодера
Абсолютные энкодеры
для всех ваших потребностей в позиционировании: высокоточное позиционирование и надежный сбор данных
Абсолютные энкодеры обнаруживают положения и, в отличие от инкрементных энкодеров, присваивают уникальное угловое положение или уникальное значение каждому сигналу. С нашими абсолютными энкодерами вы знаете, где находятся ваши машины в любой момент, даже в случае сбоя питания. Абсолютные энкодеры не требуют опорного значения или эталонного прогона при каждом включении станка, поэтому ваши машинные данные не теряются для энкодера при его выключении.Интерфейсы абсолютных энкодеров включают RS485, SSI и CAN open.
С нашими абсолютными энкодерами вы знаете, где находятся ваши машины в любой момент, даже в случае сбоя питания. Абсолютные энкодеры не требуют опорного значения или эталонного прогона при каждом включении станка, поэтому ваши машинные данные не теряются для энкодера при его выключении.Интерфейсы абсолютных энкодеров включают RS485, SSI и CAN open.
Обзор основных характеристик и преимуществ абсолютных энкодеров
Многооборотный энкодер
по сравнению с однооборотным энкодером
В однооборотных энкодерах закодированные выходные сигналы повторяются с каждым новым оборотом вала. Однооборотные энкодеры имеют диапазон измерения 360 градусов , то есть ровно один оборот. Если вал вращается более чем на 360 градусов, выходные параметры дальнейших оборотов снова соответствуют сигналу первого оборота.Таким образом, без дополнительной обработки данных или соответствующей оценки или контроля выходного сигнала невозможно суммировать полные обороты, уже сделанные с использованием отдельных точек данных с однооборотным энкодером.
Многооборотные энкодеры , с другой стороны, позволяют измерять диапазон более 360 градусов. Таким образом, энкодеры могут генерировать отличительный выходной сигнал для каждого положения вала для более 8 триллионов оборотов . Выходной сигнал энкодеров определяется количеством оборотов и положением вала в пределах одного оборота и является уникальным в пределах дисперсии сигнала максимум 8.8 триллионов оборотов. Это обеспечивает действительную и надежную запись уже завершенных оборотов энкодера.
Оптический энкодер: высочайшее разрешение и точность благодаря нашему оптическому принципу измерения
Оптические поворотные энкодеры — это датчики, в которых используется оптический принцип измерения для работы с очень точной точностью с максимальным разрешением изображения и генерацией цифровых импульсов. Оптический энкодер состоит из прозрачного кодового диска, который подсвечивается светодиодом и преобразует полученные данные в электрические сигналы. Оптический принцип измерения обеспечивает высочайшую точность сбора данных.
Оптический принцип измерения обеспечивает высочайшую точность сбора данных.
Магнитные энкодеры: надежное решение для суровых условий эксплуатации
Магнитные энкодеры от Balluff особенно подходят для использования в суровых условиях окружающей среды, например, при экстремальных температурах. Они нечувствительны к ударам и вибрации и представляют собой универсальное надежное решение среди энкодеров для применения в тяжелой промышленности или станкостроении. Области применения не ограничены, поскольку компактная конструкция позволяет использовать даже самые маленькие детали машин.
Подберите подходящий для вас энкодер с помощью нашего конфигуратора энкодера
С помощью нашего конфигуратора энкодера вы можете быстро и легко найти идеальный энкодер для вашего приложения из 1,8 миллиона вариантов. Наши энкодеры, инкрементальные или абсолютные, магнитные или оптические, соответствуют вашим требованиям.
Основы энкодера для инженеров по управлению движением
Энкодеры являются важными элементами в системе управления движением, поскольку они обеспечивают обратную связь по положению и/или скорости для контроллера движения, позволяя контроллеру замкнуть контур управления. Число приложений, требующих кодировщиков, велико, и типы и размеры кодировщиков, которые обслуживают эти приложения, столь же многочисленны. Инженеру-конструктору может быть довольно сложно выбрать именно тот кодировщик, который соответствует его или ее потребностям. В этом документе рассматриваются различия между типами энкодеров и некоторые параметры, которые можно указать для выбора наилучшего энкодера для задания, с акцентом на наиболее распространенный тип энкодера: поворотный энкодер.
Число приложений, требующих кодировщиков, велико, и типы и размеры кодировщиков, которые обслуживают эти приложения, столь же многочисленны. Инженеру-конструктору может быть довольно сложно выбрать именно тот кодировщик, который соответствует его или ее потребностям. В этом документе рассматриваются различия между типами энкодеров и некоторые параметры, которые можно указать для выбора наилучшего энкодера для задания, с акцентом на наиболее распространенный тип энкодера: поворотный энкодер.
Линейная и линейнаяПоворотные энкодеры
Датчики положения/скорости
бывают двух механических конфигураций: линейные и поворотные. Как следует из названия, линейный энкодер измеряет положение или скорость объекта, движущегося по прямой линии. Типичными линейными приложениями являются управление линейными двигателями или столами X-Y, такими как те, которые используются на вертикальных фрезерных станках с ЧПУ, или станках для захвата и размещения, используемых при сборке электроники. Они также часто встречаются в таких устройствах, как метрологические приборы, включая цифровые штангенциркули.С другой стороны, поворотный энкодер используется для измерения угла или скорости вращения объекта. Некоторые типичные области применения включают управление скоростью двигателя или угловое управление подвижной фотоэлектрической батареей для слежения за солнцем или управление угловым положением манипулятора робота.
Они также часто встречаются в таких устройствах, как метрологические приборы, включая цифровые штангенциркули.С другой стороны, поворотный энкодер используется для измерения угла или скорости вращения объекта. Некоторые типичные области применения включают управление скоростью двигателя или угловое управление подвижной фотоэлектрической батареей для слежения за солнцем или управление угловым положением манипулятора робота.
Имеются поворотные энкодеры
с различными физическими характеристиками для различных рабочих сред. Например, те, которые используются в суровых промышленных условиях, должны быть спроектированы так, чтобы выдерживать суровые и экстремальные условия работы.Экстремальные температуры, вибрация, грязь и мусор — вот лишь некоторые из проблем, с которыми этим энкодерам приходится сталкиваться ежедневно. В результате промышленные энкодеры, как правило, имеют большие размеры и прочную конструкцию, чтобы выдерживать жесткие условия эксплуатации. Для менее суровых условий, например, при производстве электроники, акцент может быть сделан на меньший размер, более низкую стоимость или возможность использовать преимущества большего количества вариантов конфигурации.
Оптические и магнитные энкодеры
Оптические энкодеры более распространены и обеспечивают высочайший уровень точности и разрешения.В поворотных энкодерах используется оптический датчик для обнаружения света, проходящего через диск или отраженного от него (также известного как кодовое колесо), узор которого состоит из прозрачных и непрозрачных линий. Когда датчик принимает свет, энкодер выдает сигнал высокого уровня. И наоборот, когда свет блокируется линией на кодовом колесе, датчик выдает низкий сигнал. Таким образом, по известному рисунку на диске можно получить пройденное расстояние и скорость движения, используя сигнальную информацию.
Магнитные энкодеры используют кодовые колеса с чередующимися магнитными полюсами, распределенными вокруг колеса в соответствии с требуемым разрешением.Магнитный датчик в энкодере определяет изменение магнитного поля при вращении колеса и генерирует серию цифровых импульсов. Преимущество магнитных энкодеров в том, что они не так чувствительны к окружающей среде, как оптические энкодеры, и могут использоваться в местах с более высокой влажностью, пылью и вибрацией. Магнитные энкодеры также могут работать в различных жидких средах. Магнитные энкодеры потребляют меньше энергии, чем их оптические аналоги, но обычно не обеспечивают такого же разрешения или точности позиционирования, как оптические энкодеры, из-за присущей магнитному полю нелинейности.
Магнитные энкодеры также могут работать в различных жидких средах. Магнитные энкодеры потребляют меньше энергии, чем их оптические аналоги, но обычно не обеспечивают такого же разрешения или точности позиционирования, как оптические энкодеры, из-за присущей магнитному полю нелинейности.
Использование магнитного энкодера может быть предпочтительнее оптического энкодера, когда существует вероятность «запотевания» оптического диска из-за конденсации влаги на кодовом диске. Рассмотрим приложение, в котором оптический энкодер выдерживается при очень низкой температуре, а затем температура окружающей среды быстро возрастает. Такое быстрое изменение температуры может привести к образованию конденсата на всех поверхностях энкодера, включая оптическое кодовое колесо. При попадании на поверхность кодового диска капель влаги нарушается светопередача изображения кодового диска на оптический датчик и на выходе может появиться ложный или отсутствующий сигнал.Благодаря конструкции магнитного энкодера конденсация влаги не является проблемой для вращающегося магнита и магнитного датчика.
Механические конфигурации
Энкодеры обратной связи двигателя
могут содержать собственные подшипники или использовать существующий набор подшипников, например, на хвостовом валу серводвигателя. Какой вариант конфигурации использовать, зависит от стабильности вала/подшипников, к которым прикреплен энкодер. Энкодеры с обратной связью с подшипниками обычно используются, когда рабочий вал имеет значительное осевое или радиальное биение (эксцентриситет или вибрация).Этот тип энкодера будет включать в себя какой-либо гибкий элемент, либо гибкую муфту вала, либо гибкое крепление корпуса, чтобы обеспечить механическое соответствие рабочим неровностям прикладного вала.
Модульные энкодеры
, также называемые комплектными энкодерами, не имеют собственного внутреннего вала. Они собираются из компонентов, поставляемых производителем энкодера, и предназначены для крепления к хвостовому валу и концевому конусу двигателя. В этих энкодерах используется механически стабильный вал двигателя, так как вал отвечает за удержание внутреннего вращающегося кодового колеса энкодера в точном положении относительно чувствительного элемента энкодера. Для этих применений производители двигателей прилагают значительные усилия для разработки высокопроизводительных двигателей с очень стабильными узлами вал/подшипник. Поскольку модульная конструкция не требует дополнительного комплекта подшипников, как в случае энкодера с обратной связью двигателя, модульные энкодеры предлагают наиболее экономичные решения с обратной связью.
Для этих применений производители двигателей прилагают значительные усилия для разработки высокопроизводительных двигателей с очень стабильными узлами вал/подшипник. Поскольку модульная конструкция не требует дополнительного комплекта подшипников, как в случае энкодера с обратной связью двигателя, модульные энкодеры предлагают наиболее экономичные решения с обратной связью.
Абсолютное и инкрементальное измерение
Одна из основных классификаций, используемых для кодировщиков, заключается в том, является ли их архитектура абсолютной или инкрементальной по своей конструкции.Это относится к типу выходных данных, которые выдает кодировщик. Как упоминалось ранее, инкрементный энкодер использует линии на внутреннем кодовом колесе для вывода последовательности цифровых импульсов, которая соответствует датчику, обнаруживающему светлые и темные области (или магнитные полюса, как в случае с магнитными энкодерами). Обычно инкрементальные оптические датчики используют несколько чувствительных элементов, разделенных определенным числом градусов, и простую аналоговую цифровую электронику для создания двух последовательностей выходных импульсов со сдвигом по фазе (обычно называемых каналом A и каналом B). Скорость вращения можно определить по частоте импульсов, а направление вращения можно определить по разности фаз между сериями импульсов A и B. В некоторых инкрементальных энкодерах к кодовому колесу добавляется дополнительный оптический канал с определенным оптическим рисунком и собственным датчиком, предназначенным для подачи электрического импульса один раз за оборот. Этот импульс, называемый индексом, может позволить контроллеру движения рассчитать угловое положение оси двигателя во время вращения кодового колеса энкодера.
Скорость вращения можно определить по частоте импульсов, а направление вращения можно определить по разности фаз между сериями импульсов A и B. В некоторых инкрементальных энкодерах к кодовому колесу добавляется дополнительный оптический канал с определенным оптическим рисунком и собственным датчиком, предназначенным для подачи электрического импульса один раз за оборот. Этот импульс, называемый индексом, может позволить контроллеру движения рассчитать угловое положение оси двигателя во время вращения кодового колеса энкодера.
Инкрементальные энкодеры очень полезны как для управления положением, так и для управления скоростью, поскольку импульсы очень просты в обработке. Недостатком инкрементных энкодеров является то, что каждый раз, когда пропадает питание, истинное положение механической системы также будет потеряно. В таких случаях механическую систему необходимо будет сбросить в известное исходное положение и перезапустить.
В некоторых приложениях повторная калибровка этого типа невозможна или очень дорога. Примером может служить оборудование для производства полупроводников, где требуется, чтобы машины выдерживали очень жесткие позиционные допуски. После отключения питания машинам требуется возможность продолжить работу с той же точки, в которой произошло отключение питания, без выполнения процедуры повторной калибровки. В таких ситуациях необходимы абсолютные энкодеры.
Примером может служить оборудование для производства полупроводников, где требуется, чтобы машины выдерживали очень жесткие позиционные допуски. После отключения питания машинам требуется возможность продолжить работу с той же точки, в которой произошло отключение питания, без выполнения процедуры повторной калибровки. В таких ситуациях необходимы абсолютные энкодеры.
Абсолютный угловой энкодер отличается от инкрементного энкодера тем, что выдает выходной сигнал, соответствующий определенному углу положения вала.Этот угол указывается с разрешением, определяемым количеством битов (например, 10 бит или 12 бит), в зависимости от общего количества угловых отметок на внутреннем колесе. Это отличается от серии импульсов, испускаемых инкрементным энкодером, которые необходимо подсчитывать для определения положения вала после цикла возврата в исходное положение.
Выходы абсолютного энкодера могут принимать различные формы в зависимости от выбранного энкодера. В некоторых энкодерах угол вала преобразуется в аналоговое напряжение, которое монотонно увеличивается по мере вращения вала.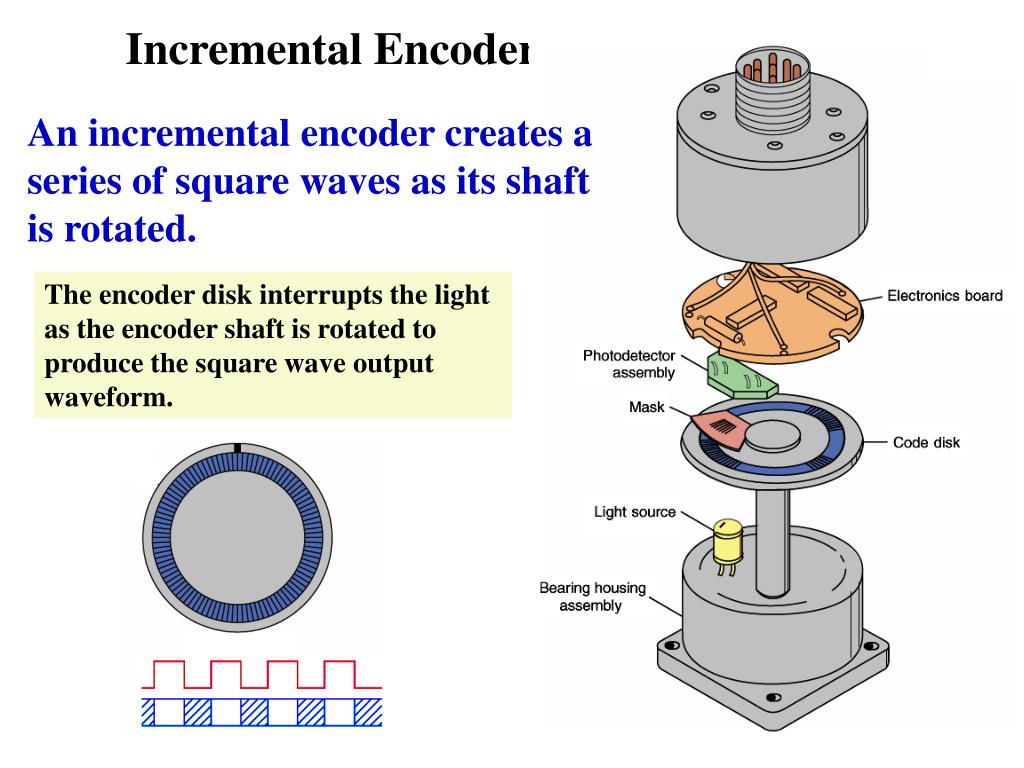 Абсолютные энкодеры также могут обеспечивать выходной сигнал с широтно-импульсной модуляцией, который генерирует импульсы, ширина которых увеличивается по мере вращения вала. Некоторые энкодеры предоставляют угловую информацию в цифровом виде через последовательный интерфейс в стиле RS-485, поддерживающий стандартный протокол связи, такой как Modbus, CANOpen или Profibus. Это позволяет контроллеру движения с одним из этих интерфейсов легко определить точное положение вала.
Абсолютные энкодеры также могут обеспечивать выходной сигнал с широтно-импульсной модуляцией, который генерирует импульсы, ширина которых увеличивается по мере вращения вала. Некоторые энкодеры предоставляют угловую информацию в цифровом виде через последовательный интерфейс в стиле RS-485, поддерживающий стандартный протокол связи, такой как Modbus, CANOpen или Profibus. Это позволяет контроллеру движения с одним из этих интерфейсов легко определить точное положение вала.
Многооборотный абсолютный энкодер — это вариант, который может выдавать информацию об абсолютном положении по нескольким оборотам вала.Общее доступное разрешение многооборотного абсолютного энкодера представляет собой сумму числа битов, состоящих из одного оборота, и битов счета оборотов. Например, абсолютный энкодер с разрешением 10 бит на оборот (деление 360 градусов вокруг колеса на 1024 сегмента) и обеспечивающий 12-битный счет оборотов даст общее разрешение 22 бита (т. е. до 1024 различных угловых положений). показания) за 4096 оборотов вала.
показания) за 4096 оборотов вала.
Со всеми доступными вариантами инженер-конструктор должен будет выбрать датчик, который лучше всего подходит для приложения.В результате дополнительных сложностей абсолютные энкодеры дороже, чем инкрементные энкодеры, но они также намного лучше подходят для критических ситуаций позиционного управления.
Точность и разрешение
Как уже говорилось, энкодеры предоставляют контроллеру движения информацию о скорости и/или положении вращающегося вала или привода линейного перемещения. Энкодер предоставляет информацию о положении плюс или минус определенный допуск, который характеризует точность устройства.Спецификация точности является наиболее часто неправильно понимаемым аспектом энкодера. Часто энкодер с более высоким разрешением указывается исходя из предположения, что большее количество строк на диске обеспечит большую точность позиционирования. Это неверно, так как точность и разрешение энкодера никак не связаны.
Точность энкодера в первую очередь определяется точностью, с которой кодовая информация размещается на диске, и тем, насколько концентрично вращается рисунок диска по отношению к чувствительному элементу энкодера.Точность энкодера указывается в угловых минутах или угловых секундах. Например: инкрементный энкодер с низким разрешением со 100 линиями (или магнитными полюсами) на оборот будет сообщать 180 градусов так же точно, как и энкодер с 10 000 строк на оборот, если они оба имеют одинаковую спецификацию точности позиционирования. Кодер с высоким разрешением может просто разбивать шаги от 0 до 180 градусов на более мелкие приращения.
Еще один способ понять разницу между точностью и разрешением — представить энкодеры разновидностью аналого-цифрового преобразователя.Они преобразуют аналоговое значение положения механического вала в цифровую форму. Как и в случае с их электронными собратьями от A до D, недостаточно просто указать разрешение. Точность традиционного электронного аналого-цифрового преобразователя обычно определяется двумя терминами: интегральная нелинейность и дифференциальная нелинейность.
Дифференциальная нелинейность – это величина, на которую соседние коды отличаются друг от друга и напрямую связана с разрешающей способностью; оно должно быть меньше одного бита, иначе разрешение было завышено (12-битный энкодер с дифференциальной нелинейностью 2 бита на самом деле является 11-битным энкодером).Для энкодеров дифференциальная нелинейность соответствует монотонности выходных кодов энкодера. Для инкрементного энкодера это почти никогда не проблема: если энкодер имеет 1000 строк на диске, вы получите 1000 импульсов от энкодера.
Интегральная нелинейность — это мера того, насколько реальный отклик преобразователя отличается от идеального отклика идеального преобразователя; большинство электронных букв от A до D имеют дугообразную кривую ошибок относительно линии, проведенной от нуля до максимального входного значения.Однако интегральная нелинейность более неуловима и трудна для определения в мире энкодеров. Его нет в большинстве спецификаций, хотя он все еще существует, обычно в виде кривой ошибки в форме синусоидальной волны.
Основной причиной интегральной нелинейности энкодеров является ошибка концентричности между кодовым колесом и чувствительным элементом энкодера. Часто имеется установочный винт, который крепит ступицу кодового колеса к валу. Это, в сочетании с зазором, необходимым для надевания ступицы на вал, приводит к очень небольшому эксцентриситету движения по отношению к системе обнаружения формы диска энкодера.Когда величина эксцентриситета известна, нелинейность может быть рассчитана и компенсирована в алгоритме управления движением.
Заключение
Энкодеры
доступны во многих механических и функциональных версиях. Понимание некоторых основных компромиссов в конструкции энкодера позволит разработчику системы правильно выбрать энкодер, который будет соответствовать его/ее потребностям в стоимости и производительности в течение всего срока службы приложения.
О компании US Digital
Имея более миллиона готовых конфигураций, а также любое количество пользовательских продуктов, US Digital обеспечивает качество в движении с 1980 года. US Digital предлагает первоклассный сервис, предоставляя решения для управления движением, наиболее подходящие для каждой уникальной потребности. Автоматизированные системы, протоколы постоянного улучшения и строгие испытания гарантируют, что мы обеспечиваем качество каждого производимого продукта. Расположенный в Ванкувере, штат Вашингтон, наш вертикально интегрированный объект и персонализированное обслуживание обеспечивают клиентам значительно более короткие сроки выполнения заказа, чем у конкурентов, предлагая выполнение большинства заказов в тот же день.
US Digital предлагает первоклассный сервис, предоставляя решения для управления движением, наиболее подходящие для каждой уникальной потребности. Автоматизированные системы, протоколы постоянного улучшения и строгие испытания гарантируют, что мы обеспечиваем качество каждого производимого продукта. Расположенный в Ванкувере, штат Вашингтон, наш вертикально интегрированный объект и персонализированное обслуживание обеспечивают клиентам значительно более короткие сроки выполнения заказа, чем у конкурентов, предлагая выполнение большинства заказов в тот же день.
.