ПОТЕРИ ЭНЕРГИИ И КПД АСИНХРОННОГО ДВИГАТЕЛЯ. Кпд асинхронного двигателя
Глава 13
• Электромагнитный момент и рабочие характеристики асинхронного двигателя
§13.1. Потери и кпд асинхронного двигателя
Преобразование электрической энергии в механическую в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2 всегда меньше мощности на входе (потребляемой мощности) Р1 на величину потерь  Р :
Р :
Р2 = Р1 -  Р (13.1)
Р (13.1)
Потери Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в электрических машинах разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Магнитные потери Рм в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания Рм = f β,
где β = 1,3 ÷ 1,5. Частота перемагничивания сердечника статора равна частоте тока в сети (f = f1), а частота перемагничивания сердечника ротора f = f2 =f1s.При частоте тока в сети f 1 = 50 Гц при номинальном скольжении sном = 1 ÷ 8 % частота перемагничивания ротора f = f2 = 2 ÷ 4 Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке (Вт):
электрические потери в обмотке статора
Рэ1 = m1 I21 r1 ; (13.2)
электрические потери в обмотке ротора
Рэ2 = m2 I22 r2 = m1 I′ 21 r′ 1 (13.3)
Здесь r1 и r2 — активные сопротивления обмоток фаз статора и ротора пересчитанные на рабочую температуру Θраб (см. § 8.4):
r1 = r1.20 [1 + α (Θраб - 20)]; r2 = r2.20 [1 + α (Θра6 - 20)], (13.4)
где r1.20 и r2.20 — активные сопротивления обмоток при температуре Θ1 = 20 °С; α — температурный коэффициент, для меди и алюминия α = 0,004.
Электрические потери в роторе прямо пропорциональны скольжению:
Рэ2 = s Рэм (13.5)
где Рэм — электромагнитная мощность асинхронного двигателя, Вт:
Рэм = Р1 = (Рм + Рэ1) (13-6)
Из (13.5) следует, что работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
В асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрическиe потери в щеточном контакте Рэ.щ = 3 I2 ΔUщ /2, где Uщ =2,2 В - переходное падение напряжения на пару щеток.
Механические потери Рмех — это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора (Рмех = n22). В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных двигателей принимают равными 0,5% от подводимой к двигателю мощности Р1:
Рдо6 = 0,005 Р1. (13.7)
При расчете добавочных потерь для неноминального режима следует пользоваться выражением
Р′доб = Рдоб β2 (13-8)
где β = I1/ I1ном —коэффициент нагрузки.
Сумма всех потерь асинхронного двигателя (Вт)
 P = Рэм + Рэ1 + Рэ2 + Рмех + Рдоб. (13.9)
P = Рэм + Рэ1 + Рэ2 + Рмех + Рдоб. (13.9)
На рис. 13.1 представлена энергетическая диаграмма асинхронного двигателя, из которой видно, что часть подводимой к двигателю мощности Р1 =m1U1I1cosφ1затрачивается в статоре на магнитные Рыи электрические Рэ1потери. Оставшаяся после этого электромагнитная мощность Рэм[см. (13.6)] передается на ротор, где частично расходуется на электрические потери Рэ2и преобразуется в полную механическую мощность Р′2. Часть мощности идет на покрытие механических Рмехи добавочных потерь Рдоб, а оставшаяся часть этой мощностиР2 составляет полезную мощность двигателя.
У асинхронного двигателя КПД
η = Р2/ Р1 =1 -  P. (13.10)
P. (13.10)
Электрические потери в обмотках РЭ1 и РЭ2 являются переменными потерями, так как их величина зависит от нагрузки двигателя, т. е. от значений токов в обмотках статора и ротора [см. (13.2) и (13.3)]. Переменными являются также и добавочные потери (13.8). Что же касается магнитных Рм и механических Рмех, то они практически не зависят от нагрузки (исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения).
Коэффициент полезного действия асинхронного двигателя с изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке (0,7 ÷ 0,8)Рном. При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (P2 > Рном) он резко убывает, что объясняется интенсивным ростом переменных потерь (Рэ1 + Рэ2 + Рдоб), величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности. График зависимости КПД от нагрузки η = f (β) для асинхронных двигателей имеет вид, аналогичный представленному на рис. 1.41 (см. рис. 13.7).
КПД трехфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт ηном = 75 ÷ 88%, для двигателей мощностью более 10 кВт ηном =90 ÷ 94%.
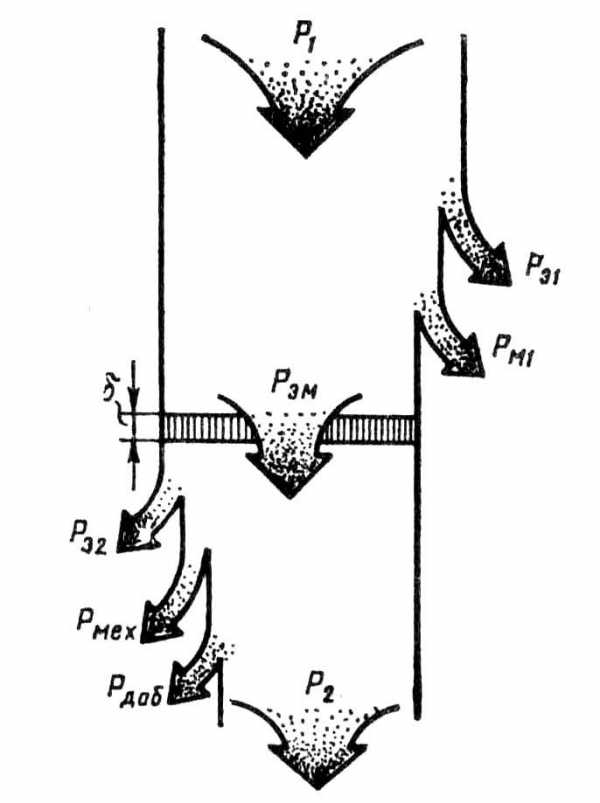
Рис. 13.1. Энергетическая диаграмма асинхронного двигателя
Пример 13.1. Трехфазный асинхронный двигатель работает от сети напряжением 660 В при соединении обмоток статора звездой. При номинальной нагрузке он потребляет из сети мощность Р1 = 16,7 кВт при коэффициенте мощности cos φ1 = 0,87. Частота ηвращения nном = 1470 об/мин. Требуется определилить КПД двигателя ηhоm, если магнитные потери Рм = 265 Вт, а механические потери Рмех = 123 Вт. Активное сопротивление фазы обмотки статора r1.20 = 0,8 Ом, и класс нагревостойкости изоляции двигателя F (рабочая температура Θра6 =115 °С).
Решение. Ток в фазе обмотки статора
I1ном = =
= =16,8 А
=16,8 А
где U1 = 660/  = 380 В.
= 380 В.
Сопротивление фазы обмотки статора, пересчитанное на рабочую температуру
Θраб = 115 ˚С, по (13.4)
r1 = r1.20 [1 + α (Θраб - 20)] = 0,8[1 + 0,004(115 - 20)] = 1,1 Ом.
Электрические потери в обмотке статора по (13.2)
Рэ1 = m1 I21ном r1 = 3 • 16,82 • 1,1 = 93 1 Вт.
Электромагнитная мощность двигателя по (13.6)
РЭМ = Р1 - (Рм + Рэ1) = 16,7 • 103 - (265 + 931) = 15504 Вт.
Номинальное скольжение sном = (n1 – nном)/ n1 = (1500 - 1470)/1500 = 0,020 . Электрические потери в обмотке ротора по (13.5)
Рэ2 =sном Рэм = 0,020 • 15504 = 310 Вт.
Добавочные потери по (13.7)
Рдо6 = 0,005 Р1 =0,005 • 16,7 • 103 =83 Вт.
Суммарные потери по (13.9)
 Р = Рм + Рэ1 + Рэ2 + Рмех + Рмех = 265 + 931 + 310 + 123 + 83 = 1712 Вт.
Р = Рм + Рэ1 + Рэ2 + Рмех + Рмех = 265 + 931 + 310 + 123 + 83 = 1712 Вт.
КПД двигателя в номинальном режиме по (13.10)
ηном = 1 -  Р/ Р1 = 1 - 1712/ (16,7 • 103) = 0,898 , или 89,8%.
Р/ Р1 = 1 - 1712/ (16,7 • 103) = 0,898 , или 89,8%.
Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим его энергетические свойства — экономичность в процессе эксплуатации. Кроме того, КПД двигателя, а точнее величина потерь в нем, регламентирует температуру нагрева его основных частей и в первую очередь его обмотки статора. По этой причине двигатели с низким КПД (при одинаковых условиях охлаждения) работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности (см. § 8.4).
studfiles.net
Потери и КПД асинхронного двигателя
Преобразование электрической энергии в механическую в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2 всегда меньше мощности на входе (потребляемой мощности) Р1 на величину потерь Р :
Р2 = Р1 - Р (13.1)
Потери Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в электрических машинах разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Магнитные потери Рм в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания Рм = f β,
где β = 1,3 ÷ 1,5. Частота перемагничивания сердечника статора равна частоте тока в сети (f = f1), а частота перемагничивания сердечника ротора f = f2 =f1s.При частоте тока в сети f 1 = 50 Гц при номинальном скольжении sном = 1 ÷ 8 % частота перемагничивания ротора f = f2 = 2 ÷ 4 Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке (Вт):
электрические потери в обмотке статора
Рэ1 = m1 I21 r1; (13.2)
электрические потери в обмотке ротора
Рэ2 = m2 I22 r2 = m1 I′ 21 r′ 1 (13.3)
Здесь r1 и r2 — активные сопротивления обмоток фаз статора и ротора пересчитанные на рабочую температуру Θраб (см. § 8.4):
r1 = r1.20 [1 + α (Θраб - 20)]; r2 = r2.20 [1 + α (Θра6 - 20)], (13.4)
где r1.20 и r2.20 — активные сопротивления обмоток при температуре Θ1 = 20 °С; α — температурный коэффициент, для меди и алюминия α = 0,004.
Электрические потери в роторе прямо пропорциональны скольжению:
Рэ2 = s Рэм (13.5)
где Рэм — электромагнитная мощность асинхронного двигателя, Вт:
Рэм = Р1 = (Рм + Рэ1) (13-6)
Из (13.5) следует, что работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
В асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрическиe потери в щеточном контакте Рэ.щ = 3 I2 ΔUщ /2, где Uщ =2,2 В - переходное падение напряжения на пару щеток.
Механические потери Рмех — это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора (Рмех = n22). В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных двигателей принимают равными 0,5% от подводимой к двигателю мощности Р1:
Рдо6 = 0,005 Р1. (13.7)
При расчете добавочных потерь для неноминального режима следует пользоваться выражением
Р′доб = Рдоб β2 (13-8)
где β = I1/ I1ном —коэффициент нагрузки.
Сумма всех потерь асинхронного двигателя (Вт)
P = Рэм + Рэ1 + Рэ2 + Рмех + Рдоб. (13.9)
На рис. 13.1 представлена энергетическая диаграмма асинхронного двигателя, из которой видно, что часть подводимой к двигателю мощности Р1 = m1 U1 I1 cos φ1 затрачивается в статоре на магнитные Ры и электрические Рэ1 потери. Оставшаяся после этого электромагнитная мощность Рэм [см. (13.6)] передается на ротор, где частично расходуется на электрические потери Рэ2 и преобразуется в полную механическую мощность Р′2. Часть мощности идет на покрытие механических Рмех и добавочных потерь Рдоб, а оставшаяся часть этой мощности Р2 составляет полезную мощность двигателя.
У асинхронного двигателя КПД
η = Р2/ Р1 =1 - P. (13.10)
Электрические потери в обмотках РЭ1 и РЭ2 являются переменными потерями, так как их величина зависит от нагрузки двигателя, т. е. от значений токов в обмотках статора и ротора [см. (13.2) и (13.3)]. Переменными являются также и добавочные потери (13.8). Что же касается магнитных Рм и механических Рмех, то они практически не зависят от нагрузки (исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения).
Коэффициент полезного действия асинхронного двигателя с изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке (0,7 ÷ 0,8)Рном. При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (P2 > Рном) он резко убывает, что объясняется интенсивным ростом переменных потерь (Рэ1 + Рэ2 + Рдоб), величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности. График зависимости КПД от нагрузки η = f (β) для асинхронных двигателей имеет вид, аналогичный представленному на рис. 1.41 (см. рис. 13.7).
КПД трехфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт ηном = 75 ÷ 88%, для двигателей мощностью более 10 кВт ηном =90 ÷ 94%.
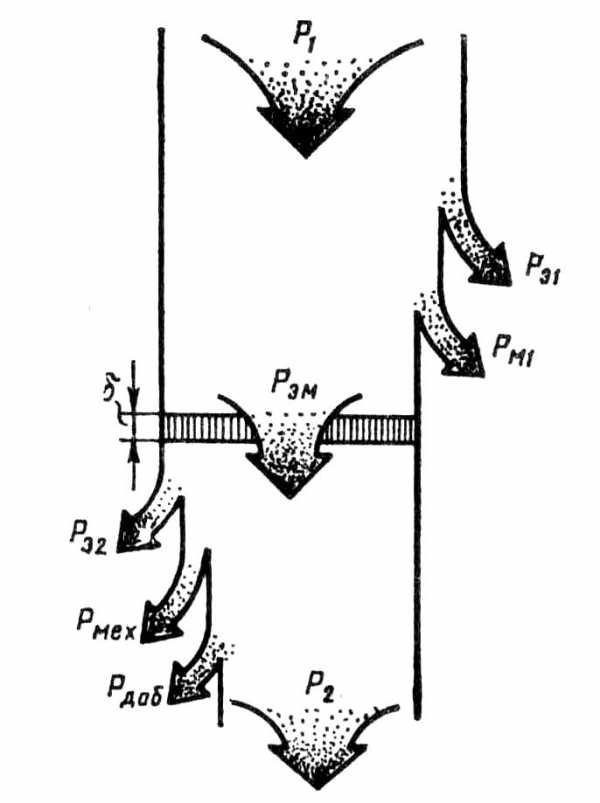
Рис. 13.1. Энергетическая диаграмма асинхронного двигателя
Пример 13.1.Трехфазный асинхронный двигатель работает от сети напряжением 660 В при соединении обмоток статора звездой. При номинальной нагрузке он потребляет из сети мощность Р1 = 16,7 кВт при коэффициенте мощности cos φ1 = 0,87. Частота ηвращения nном = 1470 об/мин. Требуется определилить КПД двигателя η hоm, если магнитные потери Рм = 265 Вт, а механические потери Рмех = 123 Вт. Активное сопротивление фазы обмотки статора r1.20 = 0,8 Ом, и класс нагревостойкости изоляции двигателя F (рабочая температура Θра6 =115 °С).
Решение. Ток в фазе обмотки статора
I1ном = = =16,8 А
где U1 = 660/ = 380 В.
Сопротивление фазы обмотки статора, пересчитанное на рабочую температуру
Θраб = 115 ˚С, по (13.4)
r1 = r1.20 [1 + α (Θраб - 20)] = 0,8[1 + 0,004(115 - 20)] = 1,1 Ом.
Электрические потери в обмотке статора по (13.2)
Рэ1 = m1 I21ном r1 = 3 • 16,82 • 1,1 = 93 1 Вт.
Электромагнитная мощность двигателя по (13.6)
РЭМ = Р1 - (Рм + Рэ1) = 16,7 • 103 - (265 + 931) = 15504 Вт.
Номинальное скольжение sном = (n1 – nном)/ n1 = (1500 - 1470)/1500 = 0,020 . Электрические потери в обмотке ротора по (13.5)
Рэ2 =sном Рэм = 0,020 • 15504 = 310 Вт.
Добавочные потери по (13.7)
Рдо6 = 0,005 Р1 =0,005 • 16,7 • 103 =83 Вт.
Суммарные потери по (13.9)
Р = Рм + Рэ1 + Рэ2 + Рмех + Рмех = 265 + 931 + 310 + 123 + 83 = 1712 Вт.
КПД двигателя в номинальном режиме по (13.10)
ηном = 1 - Р/ Р1 = 1 - 1712/ (16,7 • 103) = 0,898 , или 89,8%.
Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим его энергетические свойства — экономичность в процессе эксплуатации. Кроме того, КПД двигателя, а точнее величина потерь в нем, регламентирует температуру нагрева его основных частей и в первую очередь его обмотки статора. По этой причине двигатели с низким КПД (при одинаковых условиях охлаждения) работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности (см. § 8.4).
Читайте также:
lektsia.info
ПОТЕРИ ЭНЕРГИИ И КПД АСИНХРОННОГО ДВИГАТЕЛЯ — КиберПедия
Цель работы: изучить особенности расчета потерь энергии и КПД асинхронного двигателя.
Подготовка к работе:
Для решения данной практической работы необходимо знать устройство и принцип действия асинхронного двигателя и зависимости между электрическими величинами, характеризующими его работу.
Мощность трехфазного асинхронного двигателя:
, (1)
где Р1, Q1– активная и реактивная мощности двигателя.
Активная мощность двигателя Р1определяет среднюю мощность необратимого преобразования в двигателе электрической энергии, получаемой из трехфазной сети, в механическую, тепловую и другие виды энергии, а реактивная мощность Q1 – максимальную мощность обмена энергией между источником и магнитным полем двигателя.
Преобразование энергии в двигателе показано на энергетической диаграмме (рис.1).
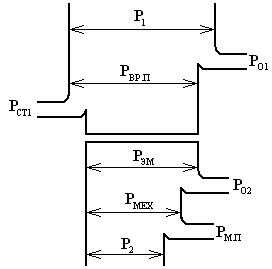
Рис.1
В ней исходной величиной является активная мощность потребления электрической энергии из трехфазной сети Р1.
Часть этой мощности Ро1 составляет мощность потерь на нагревание проводов обмотки статора. Остальная мощность преобразуется в мощность вращающегося магнитного поля Рвр.п, часть которой Рст1 составляет мощность потерь из-за гистерезиса и вихревых токов в сердечнике статора. Мощность потерь в сердечнике ротора, через который замыкается вращающийся магнитный поток, практического значения не имеет, так как частота тока в роторе f2 весьма мала (1-3 Гц), и мощность потерь из-за гистерезиса и вихревых токов незначительна.
Оставшаяся часть мощности вращающегося магнитного поля составляет электромагнитную мощность ротора
. (1)
Электромагнитный момент двигателя Мэм при при частоте вращения n2определяется по формуле
(2)
Чтобы определить механическую мощность Рмех, развиваемую ротором, из электромагнитной мощности нужно вычесть мощность потерь на нагревание проводов обмотки ротора Ро2. Следовательно, , (3)
Полезная механическая мощность Р2на валу двигателя будет меньше механической мощности Рмех из-за механических потерь Рм.п в двигателе, т.е.
(4)
Суммарные потери в двигателе ∑р = Ро1+Рст1+Ро2+Рм.п(5)
или ∑р = Р1 –Р2(6)
Отношение полезной механической мощности Р2на валу двигателя к активной мощности Р1 потребления электрической энергии из сети определяет КПД асинхронного двигателя:
. (7)
КПД современных трехфазных асинхронных двигателей при номинальном режиме работы составляет 0,8 -0,95.
Ход выполнения работы:
Переписать условие задачи. Данные для своего варианта взять из таблицы 1. Решение необходимо выполнять по действиям с нумерацией и краткими пояснениями.
Асинхронный трехфазный двигатель с короткозамкнутым ротором при номинальной мощности Р2, напряжении Uном, и токе Iном потребляет из сети мощность Р1. КПД двигателя ηном, а коэффициент мощности cos φном. Потери в обмотках статора Ро1, в стали статора Рст1, в обмотках ротора Ро2, механические Рм.п. Суммарные потери в двигателе ∑р. Электромагнитная мощность, передаваемая магнитным потоком ротору, Рэм. Двигатель развивает номинальный момент Мном и электромагнитный момент Мэм при частоте вращения n2. Определить величины, отмеченные прочерками в таблице1.
Начертить в масштабе энергетическую диаграмму двигателя.
Таблица 1
| № вар. | Р2 | Uном | Iном | Р1 | ηном | cosφ | Ро1 | Рст1 | Ро2 | Рм.п | ∑р | Рэм | Мном | Мэм | n2 |
| кВт | В | А | кВт | кВт | кВт | кВт | кВт | кВт | кВт | Нм | Нм | об/мин | |||
| - | 15,8 | - | 0,88 | - | 0,25 | - | 0,15 | - | - | 4.73 | 29,8 | - | |||
| - | - | 2,91 | 0,86 | 0,82 | - | 0,1 | 0,08 | 0,05 | - | - | 8,22 | - | - | ||
| 4,5 | - | - | - | 0,85 | 0,25 | - | 0,15 | 0,08 | 0,62 | - | 29,8 | - | - | ||
| - | 5,38 | - | 0,86 | 0,82 | 0,18 | 0,1 | 0,08 | - | - | - | - | - | |||
| - | 22,4 | - | - | - | - | 0,4 | - | 0,2 | 2,2 | 20,8 | - | ||||
| - | 14,2 | - | - | 0,85 | - | 0,2 | - | 0,11 | 0,96 | 7,36 | - | - | |||
| - | - | 22,4 | 22,2 | - | 0,87 | - | 0,6 | - | 2,2 | 20,8 | - | - | |||
| 2,5 | - | 5,38 | - | 0,86 | 0,82 | 0,18 | - | - | 0,05 | - | 2,53 | - | 8,33 | - | |
| - | 22,2 | - | 0,87 | 0,4 | - | 0,2 | - | - | - | 20,8 | - | ||||
| - | 14,2 | 7,96 | - | - | 0,4 | - | 0,25 | - | 0,96 | - | - | 7,36 |
Контрольные вопросы:
1. В чем сущность активной и реактивной мощности асинхронного двигателя?
2. Какие виды потерь имеют место в асинхронном двигателе и какова их природа?
3. Дайте определение КПД асинхронного двигателя.
Практическая работа № 13
ГЕНЕРАТОР ПОСТОЯННОГО ТОКА
Цель работы: изучить особенности расчета генераторов постоянного тока
Подготовка к работе:В настоящее время одним из основных способов производства электроэнергии является преобразование механической энергии в электрическую, которое осуществляется генераторами постоянного и переменного тока
Генераторы постоянного тока (ГПТ) делят на два типа:
-с самовозбуждением (рис.1),
- с независимым возбуждением (рис.2).
Самовозбуждение в генераторах постоянного тока может быть осуществлено при параллельном (рис.1а), последовательном (рис.1б) и смешанном (рис.1в) соединении обмоток возбуждения с обмотками якоря.
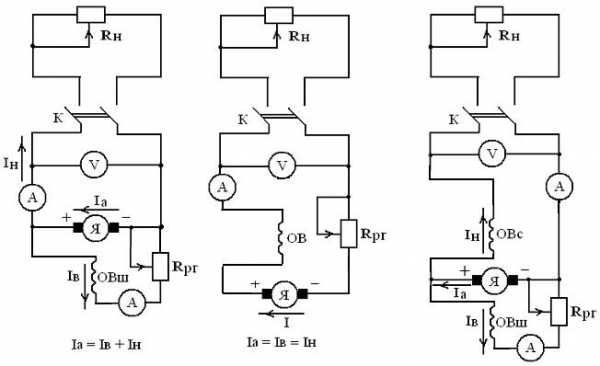
а) б) в)
Рис.1.
Самовозбуждение генератора происходит при наличии трех условий:
1) остаточного магнитного потока, создающего ЭДС;
2) совпадения направления поля обмотки возбуждения с направлением остаточного магнитного потока;
3)сопротивление обмотки возбуждения меньше критического, т.е. когда ток возбуждения способен достигнуть значения, обеспечивающего заданную ЭДС.
Генератор с независимым возбуждением требует питания обмотки возбуждения отдельным независимым источником питания.
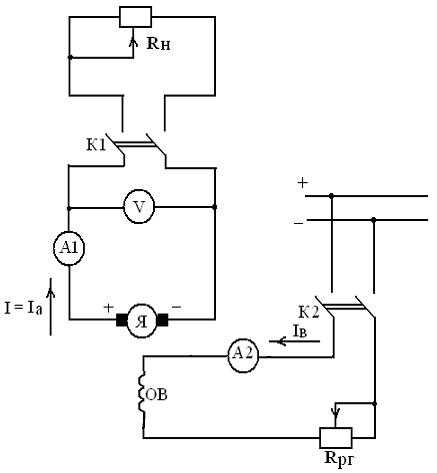
Рис. 2.
Уравнение ЭДС якоря генератора E = U + IaRa (1)
показывает связь между напряжением на выводах, падением напряжения в обмотке якоря и ЭДС якоря.
Ход работы:
1. Произвести расчет ГПТ с параллельным возбуждением рассчитанным на напряжение Uн и полезную мощность P2 . Сила тока в нагрузке Iн, в цепи якоря Iа, в обмотке возбуждения Iв. Сопротивление якоря Rа, обмотки возбуждения Rв. Генератор развивает ЭДС E. Электромагнитная мощность P1, суммарные потери ∑р при КПД ηг . Потери в якоре Pа, в обмотке возбуждения Pв.
2. Заполнить таблицу 1
Расчетные формулы и таблица 1 приведены ниже.
ηг = P2 ∕ P1 ; (2)
Eа = Uном + Iа Rа (3)
∑P = P1 - P2 ; (4)
Pэм = Eа Iа ; (5)
P2 = Uн Iн ; (6)
Pа = Iа2 Rа ; (7)
Pв = Iв2 Rв ; (8)
Iв = Uн ∕ Rв ; (9)
Iа = Iн + Iв ; (10)
Iв= Pв ∕ Uн (11)
Таблица 1
| Вар | P2 | Uном | Iн | Iв | Iа | Rа | Rв | Eа | Pэм | P1 | ∑P | ηг | Pа | Pв |
| № | кВт | В | А | А | А | Ом | Ом | В | кВт | кВт | кВт | - | Вт | Вт |
| 0,15 | 0,9 | |||||||||||||
| 20,7 | 0,18 | 2,8 | ||||||||||||
| 2,9 | 40,3 | 2,6 | ||||||||||||
| 11,8 | ||||||||||||||
| 0,07 | 2,2 | |||||||||||||
| 0,9 | ||||||||||||||
| 2,4 | 17,4 | 0,25 | 0,6 | |||||||||||
| 2,8 | ||||||||||||||
| 21,6 | 0,9 |
Контрольные вопросы
1.Дать определение генератора.
2.Начертить схемы включения генераторов с самовозбуждением и независимым возбуждением. Какая из схем нашла наибольшее распространение и почему?
3.Перечислить условия необходимые для возникновения самовозбуждения ГПТ.
Практическая работа № 14
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Цель работы: изучить особенности расчета двигателей постоянного тока.
Подготовка к работе:
Основное достоинство двигателей постоянного тока заключается в возможности плавного регулирования частоты вращения и получения больших пусковых моментов, что очень важно для тяговых двигателей на электрическом транспорте, а также для привода различного технологического оборудования.
Электрические машины постоянного тока малой мощности применяются в системах автоматического регулирования, как для привода исполнительных механизмов, так и в качестве датчиков частоты вращения подвижных частей регулируемой системы.
Недостатком двигателей постоянного тока является необходимость предварительного преобразования для них электрической энергии цепи переменного тока в электрическую энергию цепи постоянного тока.
Так же как и в генераторах, обмотки возбуждения двигателя могут иметь последовательное, параллельное и смешанное согласное включение обмоток, а также независимое (от постороннего источника тока или постоянного магнита).
Двигатель с параллельным возбуждением (рис.1а). Благодаря обратимости, работа машины постоянного тока в режиме генератора с параллельным возбуждением может быть заменена на работу в режиме двигателя. Для этого достаточно сначала уменьшить до нуля вращающий момент первичного двигателя, а затем приложить к валу тормозной момент. При этом уменьшается частота вращения и ЭДС якоря, а направление тока в его обмотке изменится на обратное. Этот ток, взаимодействуя с магнитным полем машины, будет создавать вращающий электромагнитный момент.
Естественная механическая характеристика двигателя с параллельным возбуждением n (Мвр) изображается прямой линией (рис.2а), слегка наклоненной в сторону оси абсцисс. При изменении нагрузки на валу двигателя от холостого хода до номинальной частоты вращения большинства двигателей параллельного возбуждения уменьшается лишь на 3–8%. Таким образом, естественную механическую характеристику двигателей с параллельным возбуждением следует считать жесткой.
Регулировать частоту вращения двигателя можно при помощи реостата в цепи якоря. Однако такое регулирование неэкономично из-за значительной мощности потерь и применяется лишь для двигателей небольших мощностей.
Более совершенный метод регулирования частоты вращения изменением напряжения якоря.
У двигателя с последовательным возбуждением (рис.1б) ток якоря является вместе с тем током возбуждения Iа = Iв . Благодаря такому соединению главный магнитный поток машины изменяется пропорционально току якоря, пока магнитопровод машины не насыщен. Как и все двигатели постоянного тока, этот двигатель для ограничения пускового тока снабжается пусковым реостатом Rп.
Ценным свойством этого двигателя является способность выдерживать сильные перегрузки при умеренном увеличении тока.
Механическая характеристика двигателя, показанная на рис.2б при IВ1= Iа, называется естественной характеристикой. Естественная механическая характеристика двигателя мягкая, так как изменение момента сильно сказывается на частоте вращения двигателя.
Для регулирования частоты вращения можно шунтировать обмотку возбуждения реостатом с регулируемым сопротивлением Rр. Возможно регулирование двигателя путем изменения напряжения на якоре.
Высокая перегрузочная способность и мягкая характеристика двигателя с последовательным возбуждением особенно ценны для электрической тяги (трамвай, метрополитен, электрические железные дороги и т.д.). Эти двигатели подходят также для работы в качестве крановых двигателей там, где имеются источники постоянного тока.
Двигатель со смешанным возбуждением (рис.1в). Двигатель с параллельным возбуждением имеет жесткую механическую характеристику, а двигатель с последовательным возбуждением – мягкую характеристику. В ряде случаев желательна некоторая промежуточная форма характеристики. Простейший способ получения такой характеристики – применение смешанного возбуждения двигателя.
В двигателе с последовательно – параллельным возбуждением преобладает последовательное возбуждение, но благодаря наличию параллельной обмотки возбуждения нарастание частоты вращения двигателя при уменьшении нагрузки на валу ограничено (рис.2 в).
В двигателе с параллельно – последовательным возбуждением преобладает параллельное возбуждение. Наличие дополнительного последовательного возбуждения стабилизирует основной магнитный поток двигателя и немного смягчает его жесткую механическую характеристику.
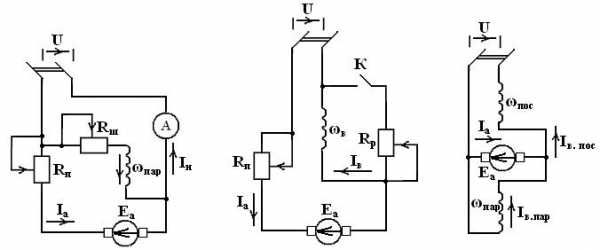
а) б) в)
Рис.1.
а) б) в)
Рис.2.
Ход работы:
1. Произвести расчет ДПТ с параллельным возбуждением, который развивает полезную мощность на валу P2, потребляя из сети ток I при напряжении Uном. Ток в обмотке якоря Iа, в обмотке возбуждения Iв. Частота вращения якоря n2. Двигатель потребляет из сети мощность P1. Полезный вращающий момент двигателя М. В якоре двигателя наводится противо-ЭДС Е. Сопротивление обмотки якоря Rа, обмотки возбуждения Rв, а КПД двигателя ηд. Используя данные таблицы 1, определить значения величин, отмеченные знаком «? ».
2. Заполнить таблицу 1
Расчетные формулы и таблица 1 приведены ниже.
P2 = P1 ηд; (1)
Ia = (Uном - E) ∕ Ra (2)
Iв = Uном ∕ Rв ; (3)
Iа = I - Iв ; (4)
P1= Uном I ; (5)
М = 9550 Р2 ∕ n2 (6)
Таблица 1
| Вар | P1 | P2 | Uном | E | I | Iа | Iв | Rа | Rв | M | n2 | ηд |
| № | кВт | кВт | В | В | А | А | А | Ом | Ом | Н м | об/мин | |
| ? | ? | ? | 0,28 | ? | 0,8 | |||||||
| ? | ? | ? | ? | 0,85 | ||||||||
| ? | ? | ? | 2,2 | 0,13 | ? | 0,85 | ||||||
| ? | 8,5 | ? | ? | 21,3 | 0,94 | 95,5 | ? | 0,85 | ||||
| ? | ? | ? | ? | 36,4 | 0,28 | 19,1 | 0,8 | |||||
| ? | ? | 81,8 | 79,6 | ? | 0,13 | ? | ||||||
| ? | ? | ? | ? | 0,85 | ||||||||
| 3,2 | ? | ? | 35,4 | 0,28 | ? | ? | ||||||
| ? | ? | 23,3 | 21,3 | ? | 95,5 | ? | ||||||
| ? | 3,2 | 36,4 | 35,4 | ? | 19,1 | ? | ? |
Контрольные вопросы
1. Назовите преимущества и недостатки двигателей постоянного тока.
2. Начертить схемы включения двигателей с параллельным, последовательным и
смешанным возбуждением.
3. Назовите методы регулирования частоты вращения двигателей постоянного тока.
4. Начертите механические характеристики для каждого типа двигателей.
Практическая работа №15
cyberpedia.su
Потери и КПД асинхронного двигателя
Преобразование электрической энергии в механическую в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2 всегда меньше мощности на входе (потребляемой мощности) Р1 на величину потерь Р :
Р2 = Р1 - Р (13.1)
Потери Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в электрических машинах разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Магнитные потери Рм в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания Рм = f β,
где β = 1,3 ÷ 1,5. Частота перемагничивания сердечника статора равна частоте тока в сети (f = f1), а частота перемагничивания сердечника ротора f = f2 =f1s.При частоте тока в сети f 1 = 50 Гц при номинальном скольжении sном = 1 ÷ 8 % частота перемагничивания ротора f = f2 = 2 ÷ 4 Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке (Вт):
электрические потери в обмотке статора
Рэ1 = m1 I21 r1; (13.2)
электрические потери в обмотке ротора
Рэ2 = m2 I22 r2 = m1 I′ 21 r′ 1 (13.3)
Здесь r1 и r2 — активные сопротивления обмоток фаз статора и ротора пересчитанные на рабочую температуру Θраб (см. § 8.4):
r1 = r1.20 [1 + α (Θраб - 20)]; r2 = r2.20 [1 + α (Θра6 - 20)], (13.4)
где r1.20 и r2.20 — активные сопротивления обмоток при температуре Θ1 = 20 °С; α — температурный коэффициент, для меди и алюминия α = 0,004.
Электрические потери в роторе прямо пропорциональны скольжению:
Рэ2 = s Рэм (13.5)
где Рэм — электромагнитная мощность асинхронного двигателя, Вт:
Рэм = Р1 = (Рм + Рэ1) (13-6)
Из (13.5) следует, что работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
В асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрическиe потери в щеточном контакте Рэ.щ = 3 I2 ΔUщ /2, где Uщ =2,2 В - переходное падение напряжения на пару щеток.
Механические потери Рмех — это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора (Рмех = n22). В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных двигателей принимают равными 0,5% от подводимой к двигателю мощности Р1:
Рдо6 = 0,005 Р1. (13.7)
При расчете добавочных потерь для неноминального режима следует пользоваться выражением
Р′доб = Рдоб β2 (13-8)
где β = I1/ I1ном —коэффициент нагрузки.
Сумма всех потерь асинхронного двигателя (Вт)
P = Рэм + Рэ1 + Рэ2 + Рмех + Рдоб. (13.9)
На рис. 13.1 представлена энергетическая диаграмма асинхронного двигателя, из которой видно, что часть подводимой к двигателю мощности Р1 = m1 U1 I1 cos φ1 затрачивается в статоре на магнитные Ры и электрические Рэ1 потери. Оставшаяся после этого электромагнитная мощность Рэм [см. (13.6)] передается на ротор, где частично расходуется на электрические потери Рэ2 и преобразуется в полную механическую мощность Р′2. Часть мощности идет на покрытие механических Рмех и добавочных потерь Рдоб, а оставшаяся часть этой мощности Р2 составляет полезную мощность двигателя.
У асинхронного двигателя КПД
η = Р2/ Р1 =1 - P. (13.10)
Электрические потери в обмотках РЭ1 и РЭ2 являются переменными потерями, так как их величина зависит от нагрузки двигателя, т. е. от значений токов в обмотках статора и ротора [см. (13.2) и (13.3)]. Переменными являются также и добавочные потери (13.8). Что же касается магнитных Рм и механических Рмех, то они практически не зависят от нагрузки (исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения).
Коэффициент полезного действия асинхронного двигателя с изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке (0,7 ÷ 0,8)Рном. При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (P2 > Рном) он резко убывает, что объясняется интенсивным ростом переменных потерь (Рэ1 + Рэ2 + Рдоб), величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности. График зависимости КПД от нагрузки η = f (β) для асинхронных двигателей имеет вид, аналогичный представленному на рис. 1.41 (см. рис. 13.7).
КПД трехфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт ηном = 75 ÷ 88%, для двигателей мощностью более 10 кВт ηном =90 ÷ 94%.
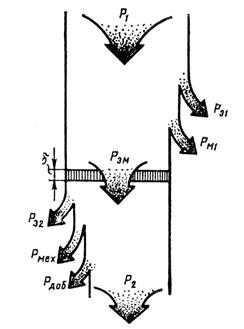
Рис. 13.1. Энергетическая диаграмма асинхронного двигателя
Пример 13.1.Трехфазный асинхронный двигатель работает от сети напряжением 660 В при соединении обмоток статора звездой. При номинальной нагрузке он потребляет из сети мощность Р1 = 16,7 кВт при коэффициенте мощности cos φ1 = 0,87. Частота ηвращения nном = 1470 об/мин. Требуется определилить КПД двигателя η hоm, если магнитные потери Рм = 265 Вт, а механические потери Рмех = 123 Вт. Активное сопротивление фазы обмотки статора r1.20 = 0,8 Ом, и класс нагревостойкости изоляции двигателя F (рабочая температура Θра6 =115 °С).
Решение. Ток в фазе обмотки статора
I1ном = = =16,8 А
где U1 = 660/ = 380 В.
Сопротивление фазы обмотки статора, пересчитанное на рабочую температуру
Θраб = 115 ˚С, по (13.4)
r1 = r1.20 [1 + α (Θраб - 20)] = 0,8[1 + 0,004(115 - 20)] = 1,1 Ом.
Электрические потери в обмотке статора по (13.2)
Рэ1 = m1 I21ном r1 = 3 • 16,82 • 1,1 = 93 1 Вт.
Электромагнитная мощность двигателя по (13.6)
РЭМ = Р1 - (Рм + Рэ1) = 16,7 • 103 - (265 + 931) = 15504 Вт.
Номинальное скольжение sном = (n1 – nном)/ n1 = (1500 - 1470)/1500 = 0,020 . Электрические потери в обмотке ротора по (13.5)
Рэ2 =sном Рэм = 0,020 • 15504 = 310 Вт.
Добавочные потери по (13.7)
Рдо6 = 0,005 Р1 =0,005 • 16,7 • 103 =83 Вт.
Суммарные потери по (13.9)
Р = Рм + Рэ1 + Рэ2 + Рмех + Рмех = 265 + 931 + 310 + 123 + 83 = 1712 Вт.
КПД двигателя в номинальном режиме по (13.10)
ηном = 1 - Р/ Р1 = 1 - 1712/ (16,7 • 103) = 0,898 , или 89,8%.
Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим его энергетические свойства — экономичность в процессе эксплуатации. Кроме того, КПД двигателя, а точнее величина потерь в нем, регламентирует температуру нагрева его основных частей и в первую очередь его обмотки статора. По этой причине двигатели с низким КПД (при одинаковых условиях охлаждения) работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности (см. § 8.4).
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
zdamsam.ru
Потери и КПД асинхронного двигателя
⇐ ПредыдущаяСтр 30 из 85Следующая ⇒
Преобразование электрической энергии в механическую в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2 всегда меньше мощности на входе (потребляемой мощности) Р1 на величину потерь Р :
Р2 = Р1 - Р (13.1)
Потери Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в электрических машинах разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Магнитные потери Рм в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания Рм = f β,
где β = 1,3 ÷ 1,5. Частота перемагничивания сердечника статора равна частоте тока в сети (f = f1), а частота перемагничивания сердечника ротора f = f2 =f1s.При частоте тока в сети f 1 = 50 Гц при номинальном скольжении sном = 1 ÷ 8 % частота перемагничивания ротора f = f2 = 2 ÷ 4 Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке (Вт):
электрические потери в обмотке статора
Рэ1 = m1 I21 r1; (13.2)
электрические потери в обмотке ротора
Рэ2 = m2 I22 r2 = m1 I′ 21 r′ 1 (13.3)
Здесь r1 и r2 — активные сопротивления обмоток фаз статора и ротора пересчитанные на рабочую температуру Θраб (см. § 8.4):
r1 = r1.20 [1 + α (Θраб - 20)]; r2 = r2.20 [1 + α (Θра6 - 20)], (13.4)
где r1.20 и r2.20 — активные сопротивления обмоток при температуре Θ1 = 20 °С; α — температурный коэффициент, для меди и алюминия α = 0,004.
Электрические потери в роторе прямо пропорциональны скольжению:
Рэ2 = s Рэм (13.5)
где Рэм — электромагнитная мощность асинхронного двигателя, Вт:
Рэм = Р1 = (Рм + Рэ1) (13-6)
Из (13.5) следует, что работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
В асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрическиe потери в щеточном контакте Рэ.щ = 3 I2 ΔUщ /2, где Uщ =2,2 В - переходное падение напряжения на пару щеток.
Механические потери Рмех — это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора (Рмех = n22). В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных двигателей принимают равными 0,5% от подводимой к двигателю мощности Р1:
Рдо6 = 0,005 Р1. (13.7)
При расчете добавочных потерь для неноминального режима следует пользоваться выражением
Р′доб = Рдоб β2 (13-8)
где β = I1/ I1ном —коэффициент нагрузки.
Сумма всех потерь асинхронного двигателя (Вт)
P = Рэм + Рэ1 + Рэ2 + Рмех + Рдоб. (13.9)
На рис. 13.1 представлена энергетическая диаграмма асинхронного двигателя, из которой видно, что часть подводимой к двигателю мощности Р1 = m1 U1 I1 cos φ1 затрачивается в статоре на магнитные Ры и электрические Рэ1 потери. Оставшаяся после этого электромагнитная мощность Рэм [см. (13.6)] передается на ротор, где частично расходуется на электрические потери Рэ2 и преобразуется в полную механическую мощность Р′2. Часть мощности идет на покрытие механических Рмех и добавочных потерь Рдоб, а оставшаяся часть этой мощности Р2 составляет полезную мощность двигателя.
У асинхронного двигателя КПД
η = Р2/ Р1 =1 - P. (13.10)
Электрические потери в обмотках РЭ1 и РЭ2 являются переменными потерями, так как их величина зависит от нагрузки двигателя, т. е. от значений токов в обмотках статора и ротора [см. (13.2) и (13.3)]. Переменными являются также и добавочные потери (13.8). Что же касается магнитных Рм и механических Рмех, то они практически не зависят от нагрузки (исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения).
Коэффициент полезного действия асинхронного двигателя с изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке (0,7 ÷ 0,8)Рном. При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (P2 > Рном) он резко убывает, что объясняется интенсивным ростом переменных потерь (Рэ1 + Рэ2 + Рдоб), величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности. График зависимости КПД от нагрузки η = f (β) для асинхронных двигателей имеет вид, аналогичный представленному на рис. 1.41 (см. рис. 13.7).
КПД трехфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт ηном = 75 ÷ 88%, для двигателей мощностью более 10 кВт ηном =90 ÷ 94%.
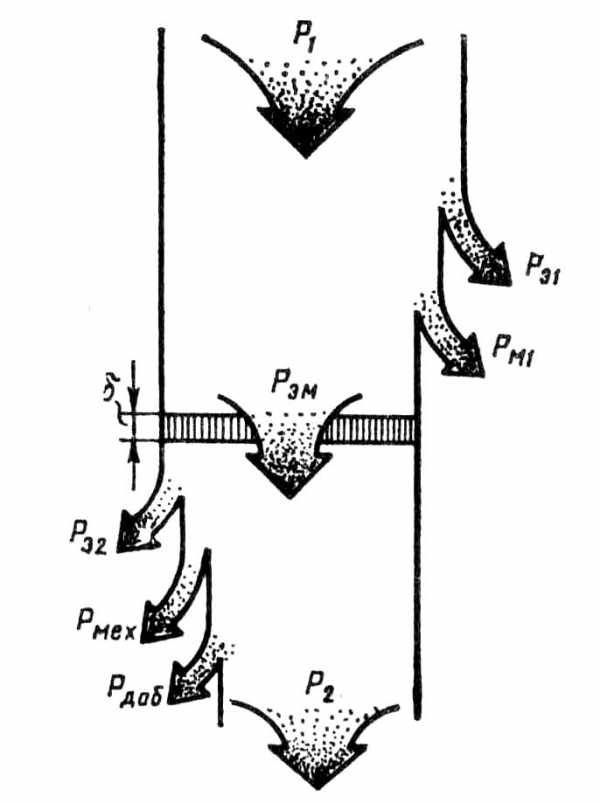
Рис. 13.1. Энергетическая диаграмма асинхронного двигателя
Пример 13.1.Трехфазный асинхронный двигатель работает от сети напряжением 660 В при соединении обмоток статора звездой. При номинальной нагрузке он потребляет из сети мощность Р1 = 16,7 кВт при коэффициенте мощности cos φ1 = 0,87. Частота ηвращения nном = 1470 об/мин. Требуется определилить КПД двигателя η hоm, если магнитные потери Рм = 265 Вт, а механические потери Рмех = 123 Вт. Активное сопротивление фазы обмотки статора r1.20 = 0,8 Ом, и класс нагревостойкости изоляции двигателя F (рабочая температура Θра6 =115 °С).
Решение. Ток в фазе обмотки статора
I1ном = = =16,8 А
где U1 = 660/ = 380 В.
Сопротивление фазы обмотки статора, пересчитанное на рабочую температуру
Θраб = 115 ˚С, по (13.4)
r1 = r1.20 [1 + α (Θраб - 20)] = 0,8[1 + 0,004(115 - 20)] = 1,1 Ом.
Электрические потери в обмотке статора по (13.2)
Рэ1 = m1 I21ном r1 = 3 • 16,82 • 1,1 = 93 1 Вт.
Электромагнитная мощность двигателя по (13.6)
РЭМ = Р1 - (Рм + Рэ1) = 16,7 • 103 - (265 + 931) = 15504 Вт.
Номинальное скольжение sном = (n1 – nном)/ n1 = (1500 - 1470)/1500 = 0,020 . Электрические потери в обмотке ротора по (13.5)
Рэ2 =sном Рэм = 0,020 • 15504 = 310 Вт.
Добавочные потери по (13.7)
Рдо6 = 0,005 Р1 =0,005 • 16,7 • 103 =83 Вт.
Суммарные потери по (13.9)
Р = Рм + Рэ1 + Рэ2 + Рмех + Рмех = 265 + 931 + 310 + 123 + 83 = 1712 Вт.
КПД двигателя в номинальном режиме по (13.10)
ηном = 1 - Р/ Р1 = 1 - 1712/ (16,7 • 103) = 0,898 , или 89,8%.
Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим его энергетические свойства — экономичность в процессе эксплуатации. Кроме того, КПД двигателя, а точнее величина потерь в нем, регламентирует температуру нагрева его основных частей и в первую очередь его обмотки статора. По этой причине двигатели с низким КПД (при одинаковых условиях охлаждения) работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности (см. § 8.4).
Читайте также:
lektsia.com
Потери и КПД асинхронного электродвигателя
Потери и КПД асинхронного электродвигателяПреобразование энергии в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии. Эти потери делятся на механические, магнитные и электрические.
Из сети в обмотку статора поступает мощность Р1. Часть этой мощности расходуется на покрытие магнитных потерь в сердечнике статора рс1, а также в обмотке статора на покрытие электрических потерь, обусловленных нагревом обмотки,
рэ1 = m1I12r1.
Оставшаяся часть мощности при помощи магнитного потока передается на ротор и поэтому называется электромагнитной мощностью
Рэм = Р1 - (рc1 + рэ1).
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора
рэ2 = m2I22r2 = m1I’22r’2.
Остальная часть электромагнитной мощности преобразуется в механическую мощность двигателя, называемую полной механической мощностью
Р’2 = Рэм - рэ2.
Таким образом, полная механическая мощность
Р’2 = m1I’22r’2[(1-s)/s] = рэ2[(1-s)/s].
Выполнив несложные преобразования, получим
рэ2[(1-s)/s] = Рэм - рэ2 и
рэ2= sРэм,
т.е. мощность электрических потерь в роторе пропорциональна скольжению. Поэтому работа асинхронного двигателя более экономична при малых скольжениях.
Следует отметить, что в роторе двигателя возникают также и магнитные потери, но ввиду небольшой частоты тока ротора (f2 = f1s) эти потери настолько малы, что ими обычно пренебрегают.
Механическая мощность на валу двигателя Р2 меньше полной механической мощности Р’2 на величину механических рмех и добавочных рд потерь
Р2 = Р’2 - (рмех + рд).
Механические потери в асинхронном двигателе обусловлены трением в подшипниках и трением вращающихся частей о воздух. Добавочные потери вызваны наличием в двигателе полей рассеяния и пульсацией поля в зубцах ротора и статора.
Таким образом, полезная мощность асинхронного двигателя
Р2 = Р1 - ∑р,
где ∑р – сумма потерь в асинхронном двигателе, ∑р = рс1 + рэ1 + рэ2+ рмех + рд.
Коэффициент полезного действия асинхронного двигателя
η = Р2/ Р1 = 1 - ∑р/ Р1.
Благодаря отсутствию коллектора КПД асинхронных двигателей выше, чем у двигателей постоянного тока. В зависимости от величины мощности асинхронных двигателей их КПД при номинальной нагрузке может быть в пределах от 83 до 95% (верхний предел соответствует двигателям большой мощности).
china.msk.ru
Потери и КПД асинхронного двигателя
⇐ ПредыдущаяСтр 70 из 111Следующая ⇒
Преобразование электрической энергии в механическую в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2 всегда меньше мощности на входе (потребляемой мощности) Р1 на величину потерь Р :
Р2 = Р1 - Р (13.1)
Потери Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в электрических машинах разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Магнитные потери Рм в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания Рм = f β,
где β = 1,3 ÷ 1,5. Частота перемагничивания сердечника статора равна частоте тока в сети (f = f1), а частота перемагничивания сердечника ротора f = f2 =f1s.При частоте тока в сети f 1 = 50 Гц при номинальном скольжении sном = 1 ÷ 8 % частота перемагничивания ротора f = f2 = 2 ÷ 4 Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке (Вт):
электрические потери в обмотке статора
Рэ1 = m1 I21 r1; (13.2)
электрические потери в обмотке ротора
Рэ2 = m2 I22 r2 = m1 I′ 21 r′ 1 (13.3)
Здесь r1 и r2 — активные сопротивления обмоток фаз статора и ротора пересчитанные на рабочую температуру Θраб (см. § 8.4):
r1 = r1.20 [1 + α (Θраб - 20)]; r2 = r2.20 [1 + α (Θра6 - 20)], (13.4)
где r1.20 и r2.20 — активные сопротивления обмоток при температуре Θ1 = 20 °С; α — температурный коэффициент, для меди и алюминия α = 0,004.
Электрические потери в роторе прямо пропорциональны скольжению:
Рэ2 = s Рэм (13.5)
где Рэм — электромагнитная мощность асинхронного двигателя, Вт:
Рэм = Р1 = (Рм + Рэ1) (13-6)
Из (13.5) следует, что работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
В асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрическиe потери в щеточном контакте Рэ.щ = 3 I2 ΔUщ /2, где Uщ =2,2 В - переходное падение напряжения на пару щеток.
Механические потери Рмех — это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора (Рмех = n22). В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных двигателей принимают равными 0,5% от подводимой к двигателю мощности Р1:
Рдо6 = 0,005 Р1. (13.7)
При расчете добавочных потерь для неноминального режима следует пользоваться выражением
Р′доб = Рдоб β2 (13-8)
где β = I1/ I1ном —коэффициент нагрузки.
Сумма всех потерь асинхронного двигателя (Вт)
P = Рэм + Рэ1 + Рэ2 + Рмех + Рдоб. (13.9)
На рис. 13.1 представлена энергетическая диаграмма асинхронного двигателя, из которой видно, что часть подводимой к двигателю мощности Р1 = m1 U1 I1 cos φ1 затрачивается в статоре на магнитные Ры и электрические Рэ1 потери. Оставшаяся после этого электромагнитная мощность Рэм [см. (13.6)] передается на ротор, где частично расходуется на электрические потери Рэ2 и преобразуется в полную механическую мощность Р′2. Часть мощности идет на покрытие механических Рмех и добавочных потерь Рдоб, а оставшаяся часть этой мощности Р2 составляет полезную мощность двигателя.
У асинхронного двигателя КПД
η = Р2/ Р1 =1 - P. (13.10)
Электрические потери в обмотках РЭ1 и РЭ2 являются переменными потерями, так как их величина зависит от нагрузки двигателя, т. е. от значений токов в обмотках статора и ротора [см. (13.2) и (13.3)]. Переменными являются также и добавочные потери (13.8). Что же касается магнитных Рм и механических Рмех, то они практически не зависят от нагрузки (исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения).
Коэффициент полезного действия асинхронного двигателя с изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке (0,7 ÷ 0,8)Рном. При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (P2 > Рном) он резко убывает, что объясняется интенсивным ростом переменных потерь (Рэ1 + Рэ2 + Рдоб), величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности. График зависимости КПД от нагрузки η = f (β) для асинхронных двигателей имеет вид, аналогичный представленному на рис. 1.41 (см. рис. 13.7).
КПД трехфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт ηном = 75 ÷ 88%, для двигателей мощностью более 10 кВт ηном =90 ÷ 94%.
Рис. 13.1. Энергетическая диаграмма асинхронного двигателя
21. Электромагнитный момент и механические характеристики асинхронного двигателя. Рабочие характеристики асинхронного двигателя.
mykonspekts.ru








Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






