
Микроконтроллерная система управления асинхронным трехфазным двигателем
В настоящее время практически 60% всей вырабатываемой электроэнергии потребляется электродвигателями. Поэтому достаточно остро стоит задача экономии электроэнергии и уменьшения стоимости электродвигателей.
Трехфазные асинхронные двигатели считаются достаточно универсальными и наиболее дешевыми, но подключать их к однофазной сети и управлять частотой вращения достаточно сложно.
Рис. 1. Числоимпульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц.
Заманчива перспектива увеличения номинальной частоты вращения двигателя в двое и более раз или использование малогабаритных двигателей, рассчитанных на частоту питающей сети 400…1000 Гц и имеющихменьшую массу и стоимость. В данной радиолюбительской конструкции предпринята попытка решения проблемы.
Предлагаемая система управления работает от однофазной сети 220 В и позволяет плавно менять обороты двигателя и отображать частоту инвертора на двухразрядном цифровом индикаторе.
Дискретность изменения частоты инвертора составляет 1 Гц и регулируется в пределах от 1 до 99 Гц. В предлагаемой схеме используется числоимпульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц (рис.1), позволяющий получать синусоидальный ток на обмотках двигателя.
Существует более перспективный, широтно-импульсный метод (ШИМ, PWM — англ.), использующий управление с обратными связями и без них, с частотами модуляции от 3 до 20 кГц и всевозможные методы коммутации, позволяющие увеличить выходное напряжение инвертора на 15.27% по сравнению с питающей сетью, т.е. до 354.390 В.
Принципиальная схема
Схема, показанная на рис.2, состоит из: управляющего устройства D2 (применен микроконтроллер PIC16F628-20/P, работающий на частоте 20 МГц), кнопок управления «Пуск» (SA1), «Стоп» (SA2), кнопок увеличения и уменьшения частоты SA3 и SA4 соответственно, двоично-семисегментного дешифратора D1, светодиодных матриц HG1 и HG2, узла торможения VT9, VT10, K1.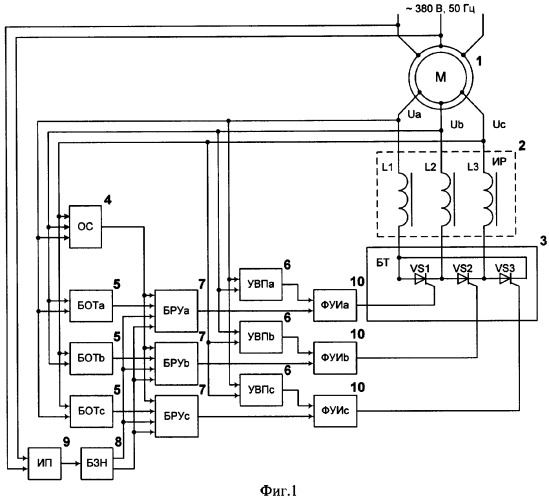
В силовой цепи используется трехфазный мостовой драйвер D4 IR2130 фирмы International Rectifier, имеющий три выхода для управления нижними ключами моста и три выхода для ключей с плавающим потенциалом управления.
Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем.
Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем (продолжение).
Данная микросхема имеет систему защиты по току, которая в случае перегрузки выключает все ключи, а также предотвращает одновременное открывание верхних и нижних транзисторов, тем самым предотвращает протекание сквозных токов. Для сброса защиты необходимо установить все единицы на входах HNx, LNx. В качестве силовых ключей применены МОП-транзисторы IRF740.
Цепь перегрузки состоит из датчика тока R10, делителя напряжения R7R9, позволяющего точно установить ток срабатывания защиты, и интегрирующей цепочки R6C3, которая предотвращает ложное срабатывание токовой защиты в моменты коммутаций. Напряжение срабатывания защиты составляет 0,5 В по входу ITRP (D4).
Напряжение срабатывания защиты составляет 0,5 В по входу ITRP (D4).
После срабатывания защиты на выходе FAULT (открытый коллектор) появляется лог.»0″, зажигается светодиод HL1 и закрываются все силовые ключи.
Для более быстрой разрядки емкостей затворов силовых транзисторов можно установить параллельно резисторам, включенным в цепь затвора, диоды в обратном направлении. Двигатель необходимо включить по схеме звезды.
Источник питания состоит из мощных диодов VD11-VD14, токоограничительного резистора R20, фильтрующей емкости C10, емкости C11, предотвращающей всплески, которые возникают при коммутациях на паразитных индуктивностях схемы, а также маломощного трансформатора T1, стабилизатора напряжения 15 В D5 для питания схемы драйвера, стабилизатора напряжения 5 В D3 для питания микроконтроллера и схемы индикации.
При использовании более мощного двигателя вместо транзисторов IRF740 можно использовать IGBT-транзисторы типов IRGBC20KD2-S, IRGBC30KD2-S, при этом диоды VD7-VD10, VD15, VD16 следует выпаять. Конденсатор C11 типа К78-2 на напряжение 600…1000 В. Вместо VD1-VD6 желательно применить сверхбыстрые диоды типа 10DF6, а емкости С15-С17 уменьшить до 2,2…4,7 мкФ, которые должны быть рассчитаны на напряжение 50 В. Трансформатор T1 мощностью 0,5.2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом 00,2 и должна выдавать 19.20 В.
Конденсатор C11 типа К78-2 на напряжение 600…1000 В. Вместо VD1-VD6 желательно применить сверхбыстрые диоды типа 10DF6, а емкости С15-С17 уменьшить до 2,2…4,7 мкФ, которые должны быть рассчитаны на напряжение 50 В. Трансформатор T1 мощностью 0,5.2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом 00,2 и должна выдавать 19.20 В.
Печатная плата и прошивка МК
Печатная плата (рис.3) выполнена из одностороннего стеклотекстолита, для того чтобы можно было воспользоваться утюго-лазерной технологией изготовления. Светодиод HL1, матрицы HG1, HG2, кнопки SA1-SA4 установлены со стороны дорожек.
Рис. 3. Печатная плата.
HEX-формат программы приведен в таблице. В момент записи в нулевую ячейку ОЗУ необходимо поместить шестнадцатеричное число от 1 до 63, начальная частота инвертора.
Коды для прошивки в текстовом формате: Скачать
Программа выполнена таким образом, что двигатель стартует с плавным набором скорости от 0 до установленной частоты примерно за 2 с (эта константа находится в ячейках 0207 и 0158 таблицы). Если нужно увеличить скорость нарастания в два раза, то вместо кодов 3005 необходимо записать 300A.
Если нужно увеличить скорость нарастания в два раза, то вместо кодов 3005 необходимо записать 300A.
С.М. Абрамов, г. Оренбург, Россия. Электрик-2004-08.
Литература:
- Козаченко В. Основные тенденции развития встроенных систем управления двигателями и требования к микроконтроллерам//СЫр№ш -1999. — №1.
- Обухов Д, Стенин С., Струнин Д, Фрадкин А. — Модуль управления электроприводом на микроконтроллере PIC16C62 и драйвере IR2131//ChipNews. — 1999. -№6.
▶▷▶▷ схема управление асинхронным двигателем микроконтроллером
▶▷▶▷ схема управление асинхронным двигателем микроконтроллером
| Интерфейс | Русский/Английский |
| Тип лицензия | Free |
| Кол-во просмотров | 257 |
| Кол-во загрузок | 132 раз |
| Обновление: | 25-03-2019 |
схема управление асинхронным двигателем микроконтроллером — Yahoo Search Results Yahoo Web Search Sign in Mail Go to Mail» data-nosubject=»[No Subject]» data-timestamp=’short’ Help Account Info Yahoo Home Settings Home News Mail Finance Tumblr Weather Sports Messenger Settings Want more to discover? Make Yahoo Your Home Page See breaking news more every time you open your browser Add it now No Thanks Yahoo Search query Web Images Video News Local Answers Shopping Recipes Sports Finance Dictionary More Anytime Past day Past week Past month Anytime Get beautiful photos on every new browser window Download Микроконтроллер, симистор, асинхронный двигатель keklabru/articles/3-2010-10-28-21-52-23/65-triachtml Cached Управление двигателем с помощью манипуляций полуволнами Двигатель: асинхронный , 3 фазы, 250 Ватт, 220 В, 2730 об/мин, тип АИР56В2n3 Фазосдвигающий конденсатор cf = 10мкФ х 400 В Управление Асинхронным Двигателем С Фазным Ротором forumcxemnet/indexphp?/topic/17334 Cached Управление Асинхронным Двигателем С Фазным Ротором Позволит ли такая схема исключать Частотные преобразователи для асинхронных двигателей: принцип fbru/article/191156/chastotnyie-preobrazovateli-dlya-a Cached По сути, для управления асинхронным двигателем нужно иметь возможность регулировки не только скорости вращения, но и времени разгона, торможения Микропроцессорное управление электроприводом » Привет Студент! privetstudentcom/kursovyye/kursovyye-po-elektronike/ Cached 22 Блок – схема алгоритма управления двигателем Блок – схема алгоритма управления двигателем показана на рисунке 21 Рисунок 21 — блок – схема алгоритма управления двигателем микроконтроллер применени микроконтроллер применение zapdocsite/mikrokontroller-primeneni-mikrokont Cached зажигание заз зажигание мотоцикл зажигание на avr зажигание на днепр зажигание на иж планета-4 зажигание на классике зажигание на тулу зажигание оппозитру зажигание схема на ваз зажигания РАЗРАБОТКА РЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА ПО СИСТЕМЕ coreacuk/download/pdf/53080978pdf асинхронным двигателем Управление будет происходить, благодаря внешнему воздействию от переменного резистора При помощи АЦП снимаем 44 Микропроцессорные системы управления studfilesnet/preview/6270824/page:32 Cached В настоящее время разрабатывают платы, обеспечивающие управление всеми типичными для данной области техники объектами (рис 49) Рис 49 МПУ управления асинхронным двигателем Электроприводы станков с ЧПУ » Школа для электрика: все об electricalschoolinfo/elprivod/1598-jelektroprivody Cached Рис 3 Типовая структура управления асинхронным двигателем с использованием преобразователя частоты Системы управления электродвигателями на микроконтроллерах wwwchipnewsru/htmlcgi/arhiv/99_01/stat_10htm Cached SimplePOWER — это модульная система управления двигателем , которая объединяет несколько различных блоков, таких как управление двигателем , датчики, управление клапанами, панель управления и тп Микроконтроллеры на основе ядра ARM Cortex M3 wwwcompelru/lib/ne/2008/1/4-mikrokontrolleryi Cached Комплектуется полным набором библиотек по управлению двигателем с использованием датчиков и без них, оценочной аппаратной платформой (реализует векторное управление асинхронным Promotional Results For You Free Download | Mozilla Firefox ® Web Browser wwwmozillaorg Download Firefox — the faster, smarter, easier way to browse the web and all of Yahoo 1 2 3 4 5 Next 441 results Settings Help Suggestions Privacy (Updated) Terms (Updated) Advertise About ads About this page Powered by Bing™
- Асинхронная машина — электрическая машина переменного тока , частота вращения ротора которой не равн
- а (в двигательном режиме меньше) частоте вращения магнитного поля , создаваемого током обмотки статора .

А.Ю. Кузьминов «Интерфейс RS232 связь между компьютером и микроконтроллером» Москва, «Радио и - ра .
А.Ю. Кузьминов «Интерфейс RS232 связь между компьютером и микроконтроллером» Москва, «Радио и связь», 2004 4. Управление двухфазным асинхронным двигателем в оптико-механических системах со сканированием.
Векторное управление асинхронными двигателями. Учебное пособие. Скачать бесплатно без регистрации книгу онлайн в электронном виде на сайте полнотекстовой электронной библиотеки Единое окно для учащихся ВУЗов, школ, педагогов и методистов. Каталог книг постоянно обновляется.
Устройство, принцип действия и свойства асинхронных двигателей. Векторное управление асинхронными двигателями. Принцип действия и взаимодействие с микроконтроллером матрицы клавиатуры. Схемы подключения устройств к микроконтроллеру с использованием биполярного транзистора, электромагнитного …
Особенности архитектуры однокристальных микропроцессоров и микроконтроллеров. Пусковые и тормозные режимы асинхронных двигателей. Усилитель на биполярном транзисторе: схема с общим эмиттером.
Производство электротехнической продукции, систем и услуг для обеспечения качества, распределения и управления электропитанием, передачи электроэнергии, осветительных приборов и коммутационных устройств. Продукты и решения, область применения.
Изучение программирования и подключения измерительных микроконтроллеров ТРМ-202. Изучение и подключение модуля по частотному управлению асинхронным двигателем на стенде. Сборка схем и изучение технологических процессов по автоматизированному управлению различных параметров.
Разработка схемы устройства quot;Цифровой осциллографquot; с использованием микроконтроллеров Особенности проектирования микропроцессорного устройства quot;Цифровой осциллографquot;. Выбор микроконтроллера, описание периферийных устройств. Разработка микропроцессорной системы на базе микроконтроллера для спортивного …
У меня, например, был случай, когда в устройстве пришлось заменять микроконтроллер 4 раза из-за криворуких “программистов”! Скалярный частотник для однофазного асинхронного двигателя 1.
Кроме громкого имени у этой мойки есть скрытая в ее недрах особенность: асинхронный электродвигатель с водяным (!) охлаждением. Сборка аккуратная, трехплунжерный насос в алюминиевом корпусе приводится мощным асинхронным двигателем.

 Усилитель на биполярном транзисторе: схема с общим эмиттером.
Усилитель на биполярном транзисторе: схема с общим эмиттером.
например
осветительных приборов и коммутационных устройств. Продукты и решения
- датчики
- которая объединяет несколько различных блоков
- оценочной аппаратной платформой (реализует векторное управление асинхронным Promotional Results For You Free Download | Mozilla Firefox ® Web Browser wwwmozillaorg Download Firefox — the faster
схема управление асинхронным двигателем микроконтроллером — Поиск в Google Специальные ссылки Перейти к основному контенту Справка по использованию специальных возможностей Оставить отзыв о специальных возможностях Нажмите здесь , если переадресация не будет выполнена в течение нескольких секунд Войти Удалить Пожаловаться на неприемлемые подсказки Режимы поиска Все Картинки Видео Новости Карты Ещё Покупки Книги Авиабилеты Финансы Настройки Настройки поиска Языки (Languages) Включить Безопасный поиск Расширенный поиск Ваши данные в Поиске История Поиск в справке Инструменты Результатов: примерно 113 000 (0,46 сек) Looking for results in English? Change to English Оставить русский Изменить язык Результаты поиска Картинки по запросу схема управление асинхронным двигателем микроконтроллером Другие картинки по запросу «схема управление асинхронным двигателем микроконтроллером» Жалоба отправлена Пожаловаться на картинки Благодарим за замечания Пожаловаться на другую картинку Пожаловаться на содержание картинки Отмена Пожаловаться Все результаты AVR494: Управление асинхронным электродвигателем — GAWru wwwgawru › Применение › Микроконтроллеров › AVR Сохраненная копия Похожие AVR494: Управление асинхронным электродвигателем переменного тока по принципу Основной особенностью, которая делает данный микроконтроллер Рисунок 32 — Блок- схема системы автоматического управления Микроконтроллерная система управления асинхронным radiostoragenet/4437-mikrokontrollernaya-sistema-upravleniya-asinhronnym-trekhfa Сохраненная копия Рейтинг: 4 — 1 голос Числоимпульсный метод управления асинхронным двигателем с частотой напряжения 5 В D3 для питания микроконтроллера и схемы индикации Микроконтроллер и управление асинхронным двигателем — Страница 15 kazusru › › Форумы по электронике › Микроконтроллеры, АЦП, память и тд Сохраненная копия Похожие 4 дек 2008 г — 5 сообщений — 5 авторов Страница 15- Микроконтроллер и управление асинхронным двигателем Микроконтроллеры , АЦП, память и тд Если там стоят только конденсаторы, то, действительно, схема ненадёжная Обычно Управление асинхронным двигателем 10 сообщений 25 нояб 2009 г Динамическое торможение асинхронных 3 сообщения 17 июл 2007 г Схема управления 3-х фазным 3 сообщения 5 дек 2006 г Другие результаты с сайта kazusru Управление асинхронным двигателем с помощью МК — Форум про Сохраненная копия Микроконтроллеры Управление асинхронным двигателем с помощью МК есть готовый мотороловский контроллер, добавить драйвер и шесть ключей, схема элементарная, стоит около 5$: The MC3PHAC is a high-performance Микроконтроллерное управление электроприводом Алексеев КБ radiopartyru/mob-literatura/484-microcontrollernoe-upravlenie-electroprivodom Сохраненная копия 16 июл 2013 г — Рассмотрены вопросы применения микроконтроллеров для управления Управление асинхронным электродвигателем переменного тока по принципу Замкнутые схемы управления электропривода с ДПТ с Микроконтроллерная система управления трехфазным wwwvotshemaru/178-mikrokontrollernaya-sistema-upr-trehfaznym-dvigatelemhtml Сохраненная копия Похожие Трехфазные асинхронные двигатели считаются достаточно схеме используется числоимпульсный метод управления асинхронным двигателем с применен микроконтроллер PIC16F628-20/P работающий на частоте 20 мГц, Системы управления электродвигателями на микроконтроллерах wwwchipnewsru/htmlcgi/arhiv/99_01/stat_10htm Сохраненная копия Похожие автор: R Visinka — Цитируется: 4 — Похожие статьи Микроконтроллеры для управления электродвигателями для простых применений, так как позволяет сократить общее число элементов схемы для управления трехфазным асинхронным двигателем в замкнутой системе Работа с трехфазным синхронным двигателем / Хабр — Habr Сохраненная копия 14 сент 2011 г — Ну и тк это трехфазный двигатель, то должно быть 3 Программа разрабатывалась для микроконтроллера PIC17 с Помнится я делал в институте диплом по тиристорному управлению асинхронным двигателем собрал драйвер на мощных полевиках, перепроверил схему 10 раз, Управление электроприводом на микроконтроллере homelabatua/publ/ehlektroonika/upravlenie_ehlektroprivodom_na/4-1-0-16 Сохраненная копия Похожие 3 июл 2014 г — В основном, предлагаемая схема предназначена для управления трехфазным асинхронным двигателем , когда в распоряжении 1 АМПЛИТУДНО-ЧАСТОТНОЕ УПРАВЛЕНИЕ АСИНХРОННЫМ wwwbpecru/wp-content/uploads/2016/06/Асинхронный-двигатель-2012pdf Похожие задачи управления трехфазным асинхронным двигателем (инвертора) на Функциональная схема сопряжения микроконтроллера ATmega128 с Частотник на ардуино Arduino и асинхронные двигатели chistotnikru/chastotnik-na-arduinohtml Сохраненная копия Похожие 11 дек 2016 г — Управление оборотами однофазного асинхронного двигателя с помощью Arduino частного преобразователя на микроконтроллере Arduino Начнем с определения того, что вы хотите по вашей схеме сделать Разработка и исследование регулируемого асинхронного mastersdonntuorg/2017/etf/chernyavskiy/library/article9htm Сохраненная копия Приведено описание разработки платы управления асинхронным двигателем с таких как: неполное управление , использование схем принудительной только на задачи электропривода микроконтроллеров , которые имеют Микроконтроллерное управление асинхронным двигателем carscomfortru//mikrokontrollernoe-upravlenie-asinhronnym-dvigatelemhtml Сохраненная копия Рассмотрены вопросы применения микроконтроллеров для управления Управление асинхронным электродвигателем переменного тока по принципу Замкнутые схемы управления электропривода с ДПТ с использованием #Реверс Асинхронного Двигателя на Микроконтроллере часть 1 ▶ 21:35 10 авг 2018 г — Добавлено пользователем Mbs Electronics Реверс Однофазного Конденсаторного двигателя Часть 1 Цифровое устройство управления асинхронным двигателем на 220 Вольт [PDF] Система управления электроприводом с микроконтроллером автор: СВ Замулко — 2016 — Похожие статьи Целью данной работы является применение микроконтроллера Рисунок 1 — Функциональная схема системы векторного управления положением АД положением в системе управления асинхронным электродвигателем с Engioru|STM32 Управляем асинхронным двигателем с помощью engioru//upravlyaem-asinxronnyim-dvigatelem-s-pomoshhyu-mikrokontrollera-st Сохраненная копия Управляем асинхронным двигателем с помощью микроконтроллера В итоге появляется такая схема управления : Входы F и R используются для [PDF] 3 моделирование алгоритма управления преобразователем fetmagmrsuru/2012-1/pdf/Volkov%20Baikov%20Germanpdf Сохраненная копия Похожие Векторное управление электроприводом с асинхронным двигателем Схему можно разделить на две части: силовую часть и систему структуру прерываний для всех Cortex- микроконтроллеров и способы их обработки КВВП микроконтроллер и управление асинхронным двигателем схема wwwheliosbiohu//mikrokontroller-i-upravlenie-asinkhronnym-dvigatelem-skhema Сохраненная копия 2 дня назад — микроконтроллер и управление асинхронным двигателем схема — Yahoo Search Results Yahoo Web Search Sign in Mail Go to Mail» Преобразователь частоты для асинхронного – схема — RadioRadar wwwradioradarnet/radiofan//frequency_converter_asynchronous_circuithtml Сохраненная копия 6 февр 2018 г — Преобразователь частоты — асинхронный двигатель , Есть несколько способов управления асинхронным двигателем , и один из них Еще один вариант с готовой прошивкой для микроконтроллера Схема [PDF] Моделирование системы векторного управления асинхронным Сохраненная копия автор: ДА Даденков — 2014 — Цитируется: 8 — Похожие статьи ления перед непосредственной реализацией на микроконтроллере Полученные в Качество векторного управления асинхронным двигателем ( АД) зависит во Структурная схема системы векторного управления , выбранная [PDF] Векторное управление wwwenergysavecomru/download/vektorn_upravpdf Сохраненная копия Похожие преобразователей частоты доля частотно-регулируемых асинхронных микроконтроллеры для управления двигателями (из серии Motor Control) Рис 3 Структурная схема привода переменного тока с векторным управлением Микроконтроллер, симистор, асинхронный двигатель wwwkeklabru/articles/3-2010-10-28-21-52-23/65-triachtml Сохраненная копия Похожие 28 окт 2012 г — Двигатель , достаточно капризный элемент и не всякий подходит для данной схемы И более того, режим плавного управления Устройства управления электродвигателями на платформе wwwtrudymairu//logicheskie-avtomaty-upravleniya-elektrodvigatelyami-na-platform автор: БН Попов — Цитируется: 2 — Похожие статьи качестве примера рассмотрен автомат для управления асинхронными двухфазными двигателя — ми, реализованный Рис1 Блок- схема автономного цифрового следящего привода На рис1 СМК – специализированный микроконтроллер ; фазными бесконтактными двигателями постоянного тока Код реверс однофазного двигателя с конденсатором и пульт ДУ Сохраненная копия Реверс однофазного конденсаторного двигателя с пультом ДУ Цифровая схема реверса однофазного асинхронного двигателя на Применение микроконтроллера позволило реализовать управление двигателем всего двумя Готовые решения на основе микроконтроллеров STM32 — Компэл › Новости Электроники › 2008 › №13 Сохраненная копия Микроконтроллеры STM32 в устройствах управления как синхронный двигатель на постоянных магнитах (СДПМ) и асинхронный Функциональная схема устройства векторного управления электродвигателем на основе МК [PDF] Untitled — ИГЭУ ispuru/files/Tom4pdf электроприводы, построенные по схеме преобразователь частоты – асинхронный векторная система управления асинхронным двигателем работает микроконтроллера Atmega семейства AVR с открытой архитектурой и Схема управления двигателем Электрические схемы управления Сохраненная копия Транзисторное управление двигателями в схемах на микроконтроллере Схема управления асинхронным двигателем при помощи реверсивного Частотный привод 5-200Гц (10-400Гц) своими руками cxemnet › Промышленная электроника Сохраненная копия Похожие 4 окт 2015 г — Изначально МК ( микроконтроллер ) является настроенным на работу с В этом управлении есть одно Но Если в процессе вращения двигателя менять задание маштабирования напряжения DC звена 1в -100в (на схеме R30) Интересует преобразователь однофазного асинхронного [PDF] выпускная квалификационная работа магистра — библиотека ЛЭТИ libraryeltechru/files//2018%20ВКР%20240335%20Лукошников%20П%20Иpdf Сохраненная копия 15 мая 2018 г — УПРАВЛЕНИЕ , МИКРОКОНТРОЛЛЕР , АСИНХРОННЫЙ ДВИГАТЕЛЬ Цель работы – создание модуля и алгоритма управления преобразователя 2 Структурная и функциональная схема преобразователя [PDF] выпускная квалификационная работа магистерская диссертация elibspbsturu/dl/2/v17-2575pdf/download Сохраненная копия программированию современных микроконтроллеров и построения систем Разработана функциональная схема лабораторного стенда, управления асинхронным двигателем все большее распространение стали получать Микроконтроллер, симистор, асинхронный двигатель — Форум РадиоЛоцман Сохраненная копия 2 нояб 2012 г — Описан практический опыт реализации управления трехфазным двигателем Представлены схемы , проект в AVR — Studio, библиотека Модуль управления электроприводом на микроконтроллере wwwchipinforu/literature/chipnews/199906/20html Сохраненная копия Похожие В основном, предлагаемая схема предназначена для управления трехфазными асинхронными двигателями , когда в распоряжении имеется [PDF] Специализированный микроконтроллер ао «пкк миландр» для Сохраненная копия циализированном микроконтроллере для управления электроприводом, разработанном в АО ная схема векторного управления асин- хронным двигателем Рис 4 Система векторного регулирования асинхронного двигателя Принципы автоматики и микроконтроллера как измерительного Сохраненная копия 28 нояб 2016 г — Приведена функциональная схема системы управления работой шаговых двигателей , приведена структурная схема системы управления для векторного управления асинхронными электродвигателями и [PDF] «Разработка систем векторного управления асинхронными motorcontrolru/wp-content/uploads/2015/11/Chuev_vector_controlpdf Похожие автор: ВФ КОЗАЧЕНКО — 2002 — Похожие статьи Обзор существующих микроконтроллеров для управления двигателями средств для систем векторного управления асинхронным двигателем на базе управления производится на основании схемы замещения АД для Разработка принципиальной схемы :: Проектирование модуля wwwgenerallytechru/gentecs-547-1html Сохраненная копия Для реализации устройства был выбран микроконтроллер ATmega независимых счётных выходов необходимые для управления шестью силовыми Функциональная схема электропривода — StudFiles :2/ Сохраненная копия 2 мая 2014 г — Управление асинхронным двигателем предполагает регулирование является микроконтроллер , выполняющий функции управления Самодельный контроллер полноприводный — стр 2 — Микроэлектроника › › Самодельный контроллер полноприводный Сохраненная копия AVR494: Управление асинхронным электродвигателем переменного тока по Вы протеусом пользуетесь для виртуальной отладки кода в схеме ? микроконтроллер для синусного управления двигателем, который стоит в моем Разработка модуля управления трехфазным асинхронным e-notabeneru/elektronika/article_28421html Сохраненная копия Разработка модуля управления трехфазным асинхронным двигателем с асинхронный двигатель , автономное питание, микроконтроллер , печатная плата, При этом независимо от схемы управления , формирующей логику Инвертор для асинхронного двигателя » Форум сайта PicRKnigaru picrknigaru/forum/topic_7 Сохраненная копия 20 сент 2012 г — Инвертор для асинхронного двигателя : Хотя сегодня для управления схема инвертора Тактовая частота микроконтроллера задана [PDF] системы управления автоматизированным электроприводом elprivodnmuorgua//makarov_a_m_sergeev_a_s_krylov_e_g_serdobintsev_yu_p_sis автор: АМ МАКАРОВ — Цитируется: 7 — Похожие статьи ны способы управления асинхронным электродвигателем Раскрываются неко- Схема управления асинхронным двигателем в функции времени 53) является специализированный микроконтроллер или цифровой [PDF] моделирование микропроцессорного устройства контроля Сохраненная копия автор: АП Попов — 2018 — Цитируется: 2 — Похожие статьи ВРАЩАЮЩЕГО МОМЕНТА АСИНХРОННОГО ДВИГАТЕЛЯ АП ПОПОВ ( Омский составить схему обеспечения работы микроконтроллера ; управление работой периферийных устройств, таких как блок внешних прерываний, ARV Research — Простая схема управления трехфазным arvradioligacom › Проекты › По группам › Микроконтроллеры Сохраненная копия Похожие 4 окт 2007 г — Частотно-управляемый (или регулируемый) асинхронный привод (далее напряжения — приводимый асинхронный двигатель (далее — АД)» Разработка схемы управления инвертором с полным набором функций В схеме используется недорогой микроконтроллер AT89C2051-24PI Разработка системы управления асинхронным двигателем на Сохраненная копия 9 апр 2012 г — Разработка системы управления асинхронным двигателем на базе однокристального микроконтроллера , Функциональная схема управления асинхронным двигателем с короткозамкнутым ротором Принцип Микроконтроллерное управление электроприводом: учеб пособие : [для Кир Борисович Алексеев — 2008 18 15 Требования к микроконтроллеру в зависимости от круга решаемых задач Схема включения асинхронного двигателя 41 232 Вариатор скорости вращения асинхронного двигателя — курсовая cinrefru/razdel/02200informatika/05/115456htm Сохраненная копия Регулирование скорости вращения асинхронных двигателей Разработка структурной и функциональной схемы двигателя Однокристальный микроконтроллер (ОМК) – микро-ЭВМ, включающая в себя все устройства, необходимые для возможность управления при максимальной скорости; • низкая реализация векторного управления асинхронным websnaukaru/issues/2014/04/33144 Сохраненная копия Похожие Векторное управление асинхронными двигателями — в настоящий момент Схема задействованных выводов микроконтроллера и их подключение Частотный преобразователь — Инженерные решения engineering-solutionsru/motorcontrol/vfd/ Сохраненная копия Похожие способен управлять скоростью и моментом асинхронных и/или синхронных двигателей На микроконтроллере частотного преобразователя выполняется Основные методы управления бесщеточными двигателями , Каждая схема силового преобразователя и каждое приложение должны быть Блоки формирования импульсных сигналов C16x/ST10x — Каскод wwwkaskodru/article/c16xst10x/ Сохраненная копия Проектирование распределенных систем управления В состав микроконтроллера C167 входит 2 блока обработки и формирования импульсных 9 приведена схема управления 2-фазными двигателями серии ДБМ, на рис 10 — схема управления 3-фазными синхронными и асинхронными двигателями Вместе с схема управление асинхронным двигателем микроконтроллером часто ищут частотное управление асинхронным двигателем с помощью микроконтроллера управление трехфазным асинхронным двигателем управление электродвигателем с помощью микроконтроллера управление асинхронным двигателем с помощью ардуино управление трехфазным двигателем микроконтроллером управление однофазным асинхронным двигателем драйвер управления асинхронным двигателем stm32 управление асинхронным двигателем Навигация по страницам 1 2 3 4 5 Следующая Ссылки в нижнем колонтитуле Россия — Подробнее… Справка Отправить отзыв Конфиденциальность Условия Аккаунт Поиск Карты YouTube Play Новости Почта Контакты Диск Календарь Google+ Переводчик Фото Ещё Покупки Документы Blogger Hangouts Google Keep Jamboard Подборки Другие сервисы Google
Асинхронная машина — электрическая машина переменного тока , частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля , создаваемого током обмотки статора .
А.Ю. Кузьминов «Интерфейс RS232 связь между компьютером и микроконтроллером» Москва, «Радио и связь», 2004 4. Управление двухфазным асинхронным двигателем в оптико-механических системах со сканированием.
Векторное управление асинхронными двигателями. Учебное пособие. Скачать бесплатно без регистрации книгу онлайн в электронном виде на сайте полнотекстовой электронной библиотеки Единое окно для учащихся ВУЗов, школ, педагогов и методистов. Каталог книг постоянно обновляется.
Устройство, принцип действия и свойства асинхронных двигателей. Векторное управление асинхронными двигателями. Принцип действия и взаимодействие с микроконтроллером матрицы клавиатуры. Схемы подключения устройств к микроконтроллеру с использованием биполярного транзистора, электромагнитного …
Особенности архитектуры однокристальных микропроцессоров и микроконтроллеров. Пусковые и тормозные режимы асинхронных двигателей. Усилитель на биполярном транзисторе: схема с общим эмиттером.
Производство электротехнической продукции, систем и услуг для обеспечения качества, распределения и управления электропитанием, передачи электроэнергии, осветительных приборов и коммутационных устройств. Продукты и решения, область применения.
Продукты и решения, область применения.
Изучение программирования и подключения измерительных микроконтроллеров ТРМ-202. Изучение и подключение модуля по частотному управлению асинхронным двигателем на стенде. Сборка схем и изучение технологических процессов по автоматизированному управлению различных параметров.
Разработка схемы устройства quot;Цифровой осциллографquot; с использованием микроконтроллеров Особенности проектирования микропроцессорного устройства quot;Цифровой осциллографquot;. Выбор микроконтроллера, описание периферийных устройств. Разработка микропроцессорной системы на базе микроконтроллера для спортивного …
У меня, например, был случай, когда в устройстве пришлось заменять микроконтроллер 4 раза из-за криворуких “программистов”! Скалярный частотник для однофазного асинхронного двигателя 1.
Кроме громкого имени у этой мойки есть скрытая в ее недрах особенность: асинхронный электродвигатель с водяным (!) охлаждением. Сборка аккуратная, трехплунжерный насос в алюминиевом корпусе приводится мощным асинхронным двигателем.
Микроконтроллеры и Технологии — Микроконтроллерное управление электроприводом. Алексеев К.Б., Палагута К.А. 2008 г.
Дата публикации: .
Рассмотрены вопросы применения микроконтроллеров для управления электроприводом; устройство, принципы действия и системы управления электродвигателей постоянного и переменного тока, набор периферийных устройств. Приведено описание и системы команд микроконтроллеров, используемых для управления электроприводом.
Название: Микроконтроллерное управление электроприводом
Авторы: Алексеев К.Б., Палагута К.А.
Издательство: МГИУ
Год издания: 2008
Страниц: 298
ISBN: 978-5-2760-1414-2
Формат: DJVU
Размер: 10,4 Мб
Язык: русский
Оглавление
Введение
Глава 1. Тенденции развития систем управления электроприводом
1.1- Назначение и виды электроприводов
1.2. Основные тенденции развития встроенных систем управления двигателем
1. 3. Типовые структуры перспективных систем управления приводами переменного тока
3. Типовые структуры перспективных систем управления приводами переменного тока
1.4. Преимущества цифровых электроприводов
1.5. Требования к микроконтроллеру в зависимости от круга решаемых задач
Глава 2. Система управления электроприводом на базе асинхронного электродвигателя с помощью микроконтроллера
2.1. Вращающееся магнитное поле машины переменного тока
2.2. Конструкция и принцип действия трехфазных асинхронных машин
2.2.1. Конструкция трехфазных асинхронных машин
2.2.2. Распределенная обмотка статора трехфазных асинхронных машин
2.2.3. Принцип действия трехфазных асинхронных машин
2.3. Схема включения, статические характеристики и режимы работы асинхронного двигателя
2.3.1. Схема включения асинхронного двигателя
2.3.2. Электромеханическая характеристика асинхронного двигателя
2.3.3. Механическая характеристика асинхронного двигателя
2.4. Асинхронный электропривод с прямым цифровым управлением и развитыми интеллектуальными свойствами
2. 5. Управление асинхронным электродвигателем переменного тока по принципу постоянства V/f и ШИМ-управления
5. Управление асинхронным электродвигателем переменного тока по принципу постоянства V/f и ШИМ-управления
2.5.1. Ключевые особенности AT90PWM3
2.5.2. Принцип действия
Глава 3. Система управления электроприводом на базе синхронного и вентильного электродвигателей с помощью микроконтроллера
3.1. Синхронная машина с электромагнитным возбуждением
3.1.1. Конструкция синхронной машины с электромагнитным возбуждением
3.1.2. Принцип действия синхронного генератора
3.1.3. Принцип действия синхронного двигателя
3.1.4. Схема включения, статические характеристики и режимы работы синхронного двигателя
3.1.5. Пуск синхронного двигателя
3.1.6. Синхронный двигатель как компенсатор реактивной мощности
3.1.7. Особенности переходных процессов электропривода с синхронным приводом
3.2. Электропривод с вентильным двигателем
3.3. Вентильно-индукторный электропривод
3.4. Многофункциональный векторный электропривод переменного тока с общим микроконтроллерным ядром
Глава 4.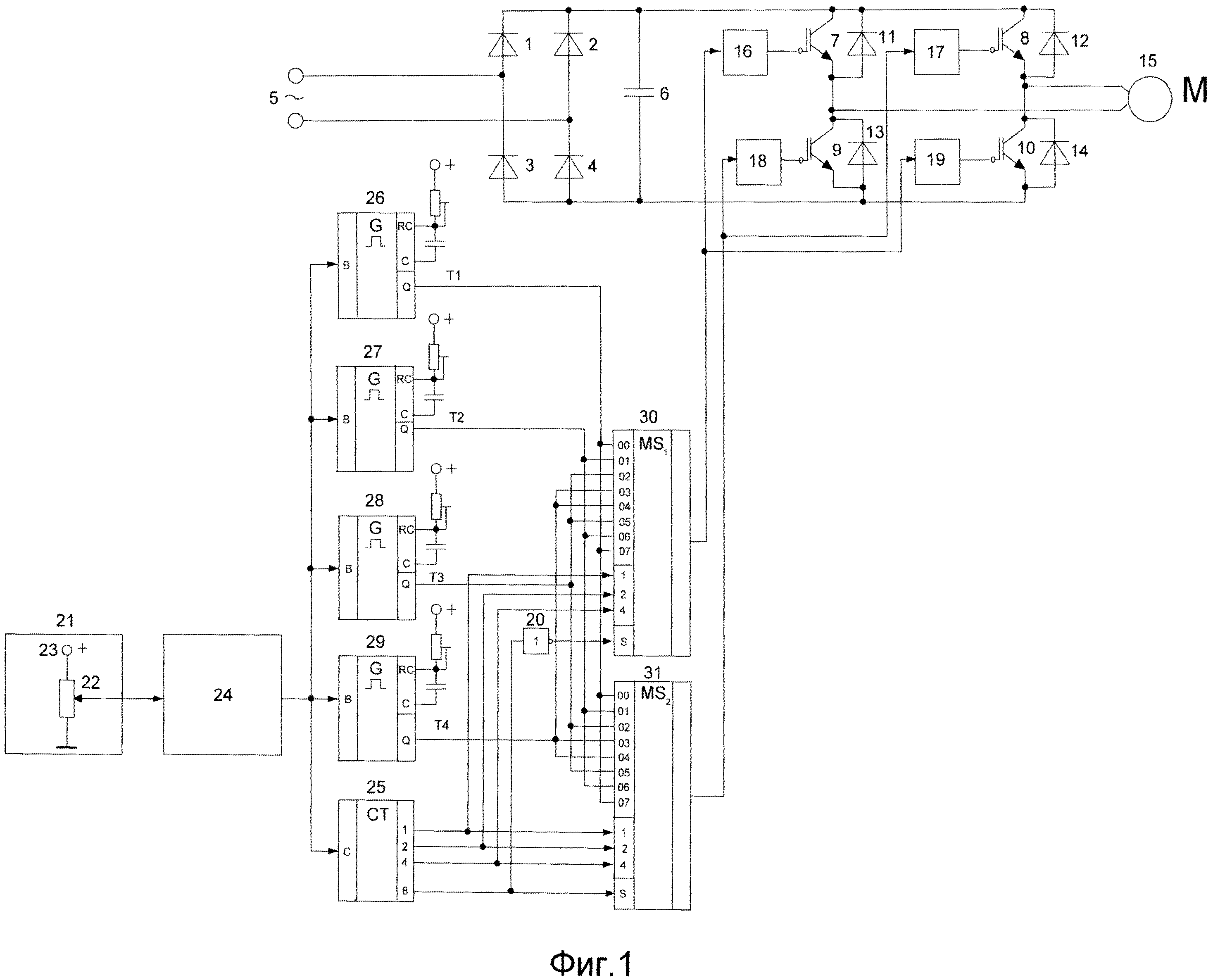 Обзор системы ЭП на базе двигателя постоянного тока
Обзор системы ЭП на базе двигателя постоянного тока
4.1. Краткое описание электропривода с двигателем постоянного тока
4.1.1. Конструкция коллекторных машин
4.1.2. Принцип действия ДПТ
4.2. Бесконтактные двигатели постоянного тока
4.3. Замкнутые схемы управления электропривода с ДПТ с использованием микроконтроллера
4.4. Управление двухфазным бесколлекторным электродвигателем постоянного тока без датчиков
4.4.1. Принцип действия
4.4.2. Управление БКЭПТ без датчиков
4.5. Методы устранения помех от ходового двигателя и контроллера
Глава 5. Электропривод на основе линейного двигателя
5.1. Конструкция и принцип действия линейного двигателя
5.2. Электропривод с линейным асинхронным двигателем
5.3. Система управления линейным прецизионным электроприводом на базе сигнального процессора
5.4. Информационное обеспечение систем управления ЛД
Глава 6. Микроконтроллерные системы управления электроприводами
6.1. Микроконтроллеры для встраиваемых систем управления электроприводом.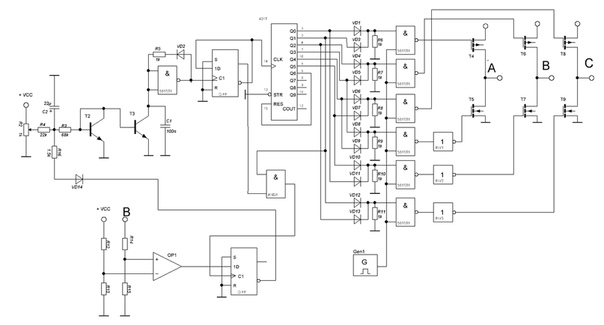 Семейство «Motor Control» фирмы Analog Devices
Семейство «Motor Control» фирмы Analog Devices
6.1.1. Общая характеристика семейства «Motor Control»
6.1.2. Модуль ШИМ-генератора
6.1.3. Модуль АЦП
6.1.4. Дополнительные периферийные модули
6.1.5. Перспективы развития
6.2. Микроконтроллеры для встраиваемых систем управления электроприводом. Серии «DashDSP»
и «Mixed Signal DSP» фирмы Analog Devices
6.2.1. Общая характеристика семейства «DashDSP»
6.2.2. Модуль ШИМ-генератора
6.2.3. Модуль АЦП
6.2.4. Дополнительные периферийные устройства
6.2.5. Серия «Mixed Signal DSP»
6.2.6. Отличительные особенности DSP-микроконтроллеров фирмы Analog Devices
6.3. Применение DSP микроконтроллеров
в управлении вентильными двигателями
без датчика положения ротора
6.4. Управление 3-фазными бесщеточными электродвигателями при помощи микроконтроллеров семейства ST7MC компании STMicroelectronics
Глава 7. Специализированные микроконтроллеры фирм Atmel и Infineon для управления электроприводами
7. 1. Семейство 8-разрядных микроконтроллеров AVR
1. Семейство 8-разрядных микроконтроллеров AVR
7.1.1. Характеристики AVR-микроконтроллеров
7.2. Микроконтроллер серии С166 фирмы Infenion AG для управления электроприводами
Глава 8. Использование интегрированных схем программируемой логики для управления шаговым двигателем
8.1. Основы устройства и работы шагового двигателя: Принцип действия шагового двигателя
8.2. Сведения о двигателях серии ДБМ
8.3. Управление двигателем ДБМ
8.4. Составление алгоритма работы блока управления
8.5. Разработка внутренней структуры цифрового блока управления
8.6. Разработка внутренней структуры программно-логической интегральной схемы
Заключение
Список литературы
Скачать с Depositfiles
Современные промышленные высоковольтные преобразователи частоты для регулирования асинхронных и синхронных двигателей
Гузеев Б.В., Хакимьянов М.И.
Уфимский государственный нефтяной технический университет, г. Уфа
Аннотация.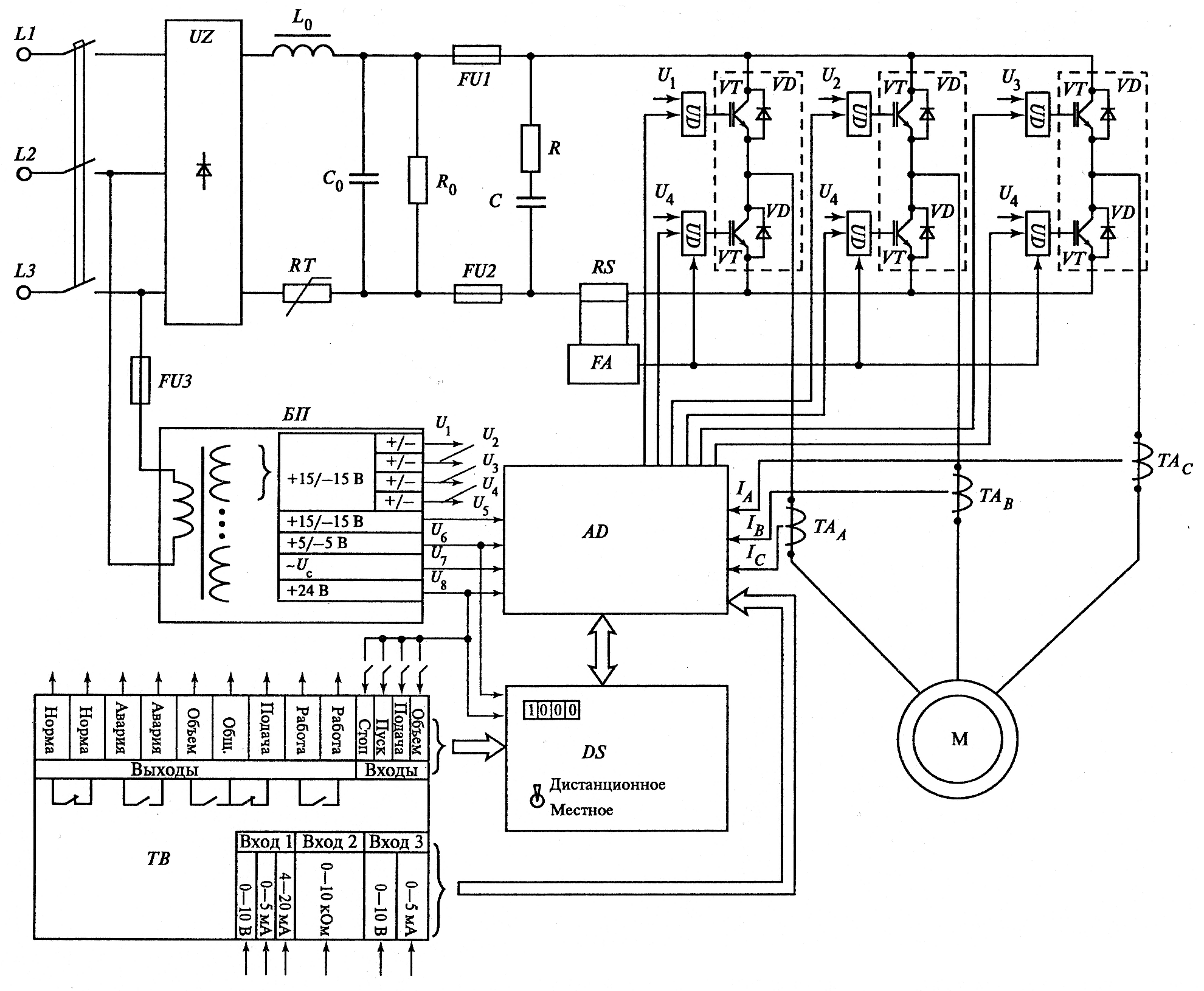 Авторы анализируют структуры и конструктивные особенности высоковольтных преобразователей частоты отечественных и зарубежных разработчиков. Приведен краткий анализ схем и элементов преобразователей частоты: многофазных трансформаторов, силовых ячеек, выполненных на запираемых тиристорах и биполярных транзисторах с изолированным затвором, фильтров. Производится сравнение форм выходных напряжений для преобразователей частоты различных типов. Сделан анализ перспектив развития высоковольтных преобразователей частоты.
Авторы анализируют структуры и конструктивные особенности высоковольтных преобразователей частоты отечественных и зарубежных разработчиков. Приведен краткий анализ схем и элементов преобразователей частоты: многофазных трансформаторов, силовых ячеек, выполненных на запираемых тиристорах и биполярных транзисторах с изолированным затвором, фильтров. Производится сравнение форм выходных напряжений для преобразователей частоты различных типов. Сделан анализ перспектив развития высоковольтных преобразователей частоты.
Ключевые слова: высоковольтный преобразователь частоты, высоковольтный частотно-регулируемый электропривод, двухтрансформаторная схема, инвертор, многоуровневый преобразователь, многообмоточный трансформатор, силовая ячейка.
Современные технологии автоматизации технологических процессов базируются в значительной степени на частотно-регулируемом электроприводе. В последнее время заметно возрос интерес к внедрению частотного регулирования мощных высоковольтных асинхронных и синхронных электродвигателей. Такие электродвигатели широко используются при трубопроводном транспорте нефти и нефтепродуктов, для перекачки воды, в металлургической и нефтехимической промышленности. В данной статье авторы анализируют характеристики и конструкции высоковольтных частотных преобразователей (ВЧП) различных отечественных и импортных производителей, опираясь на литературные источники.
Такие электродвигатели широко используются при трубопроводном транспорте нефти и нефтепродуктов, для перекачки воды, в металлургической и нефтехимической промышленности. В данной статье авторы анализируют характеристики и конструкции высоковольтных частотных преобразователей (ВЧП) различных отечественных и импортных производителей, опираясь на литературные источники.
Во многих работах [1, 5] рассмотрены структурные схемы и топология ВЧП.
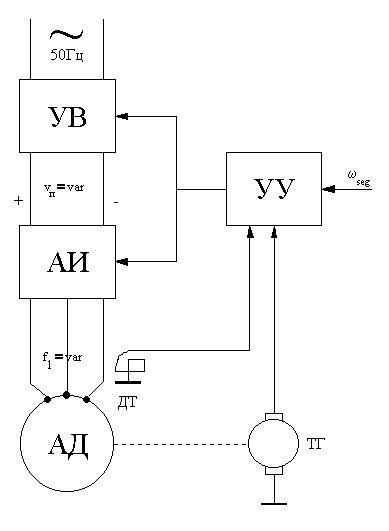
Так, можно выделить такие структуры ВЧП, как двухтрансформаторная схема с низковольтным инвертором (рис. 1) и многоуровневые преобразователи (рис. 2).
В настоящее время круг рациональных технических решений для различных схем и видов ВПЧ с автономными инверторами тока (АИТ) и напряжения (АИН) в целом определился, но процесс их совершенствования непрерывно продолжается в связи с появлением новых силовых полупроводниковых элементов. В литературных источниках анализируется продукция таких фирм, как ABB, Siemens, Allen-Bradley, Toshiba, Mitsubishi, Robicon, Ansaldo, Alstom, ESTEL, GE, Hyundai и других. Например, ЗАО «Автоматизированные Системы и Комплексы» завершают пусконаладочные работы на главных электроприводах 24 магистральных насосных агрегатов на первом участке нефтепровода «Восточная Сибирь Тихий океан». Электроприводы выполнены на основе преобразователей частоты
Например, ЗАО «Автоматизированные Системы и Комплексы» завершают пусконаладочные работы на главных электроприводах 24 магистральных насосных агрегатов на первом участке нефтепровода «Восточная Сибирь Тихий океан». Электроприводы выполнены на основе преобразователей частоты
(ПЧ) АВВ АСS6000 (3,1 кВ/3,3 кА) и синхронных электродвигателей с бесщеточным возбуждением АВВ АМS900 (14,5 МВт).
Рис. 1. Преобразователь ПЧВН производства ЗАО «ЭЛЕКТРОТЕКС», выполненный по двухтрансформаторной схеме с низковольтным инвертором
Рис. 2. Высоковольтный многоуровневый преобразователь частоты ПЧВМ производства ЗАО «ЭЛЕКТРОТЕКС»
Топология и принципы управления инверторами в настоящее время определяются современными силовыми полупроводниковыми элементами нового типа (IGBT, GTO, IGCT, SGCT), а также различными видами ШИМ (широтно-импульсной модуляции). Например, ШИМ со «слежением» (релейного типа), программная ШИМ с избирательным подавлением высших гармоник, многоуровневая ШИМ, ШИМ в комбинации с амплитудно-импульсной модуляцией и другие.
Стремление получать на выходе инверторов ток и напряжение для питания электродвигателя с меньшим количеством гармонических составляющих, определило, по мнению авторов, несколько подходов производителей к построению инверторов [1]. Например, известны инверторы с тремя уровнями напряжения (3-level) и коммутацией в «звезду» (с фиксированной нулевой точкой или фиксированной нейтралью (Neutral-Point Clamped – NPC)), либо с четырьмя уровнями напряжения (4-level). Следующим шагом в улучшении формы выходного напряжения инверторов является выполнение их многоуровневыми (multi–level). ВПЧ с такими инверторами в различных модификациях выпускают Robicon, Toshiba, Mitsubishi Electric, GE. В этом случае наиболее сложным элементом ВПЧ является входной трансформатор (рис. 3).
Рис. 3. Многообмоточный трансформатор
В работе [1] сформулированы направления работ, необходимых для создания надежных высоковольтных электроприводов с регулируемой выходной частотой. Это обеспечение электромагнитной совместимости автономного инвертора с асинхронным двигателем и системой электроснабжения; обеспечение соответствия показателей качества электроэнергии действующим стандартам; оптимизация параметров высоковольтных вентилей, состоящих из последовательно соединенных нескольких силовых полупроводниковых приборов нового поколения; диагностика вентильного оборудования преобразователя, обеспечивающая превентивный контроль силовой схемы; совершенствование функций микропроцессорного контроллера; совершенствование тест-контроля элементов оборудования и выходного контроля преобразователей частоты; стимулирование применения новых конструкционных материалов, оптоэлектроники, совершенствование системы охлаждения силовых полупроводниковых приборов.
АВС Холдинг сообщает о разработанных высоковольтных преобразователях частоты серии АВS−DRIVE для регулирования скорости асинхронных и синхронных электродвигателей, удовлетворяющих самым жестким требованиям стандарта IEEE 519 1992 относительно гармонического искажения тока и напряжения. Преобразователи частоты ABS-DRIVE рассчитаны на работу с синхронными и асинхронными электродвигателями мощностью до 5 000 кВт и наиболее эффективны при работе на низких скоростях.
Структурно частотные преобразователи состоят из интегрированного входного трансформатора, секций силовых ячеек и секций микроконтроллерного оборудования. На напряжения 6 и 6,6 кВ используются 15, 18 или 21 ячейка, соединенные последовательно по 5, 6 или 7 штук в каждой фазе. На напряжения 10 и 11 кВ используются 24 или 27 ячеек, соединенных последовательно по 8 или 9 штук в каждой фазе. Благодаря использованию многообмоточного входного трансформатора и «многоячеистой» структуре силовой схемы потребляемый преобразователем частоты ток имеет практически синусоидальную форму ([1], рис. 4), что отвечает требованиям ГОСТ 13109-97 к качеству сети и ГОСТ Р 51524-99 по электромагнитной совместимости, при этом коэффициент электрической мощности превышает 95 % во всем скоростном диапазоне без использования внешних конденсаторов. Кроме того, не происходит перегрузки по реактивной мощности питающих линий, выключателей и трансформаторов. Приводы ABS-DRIVE предотвращают «перекрестные искажения», возникающие в результате взаимодействия с другими преобразователями частоты, выпрямительными устройствами и так далее, подключенными к той же сети электроснабжения.
4), что отвечает требованиям ГОСТ 13109-97 к качеству сети и ГОСТ Р 51524-99 по электромагнитной совместимости, при этом коэффициент электрической мощности превышает 95 % во всем скоростном диапазоне без использования внешних конденсаторов. Кроме того, не происходит перегрузки по реактивной мощности питающих линий, выключателей и трансформаторов. Приводы ABS-DRIVE предотвращают «перекрестные искажения», возникающие в результате взаимодействия с другими преобразователями частоты, выпрямительными устройствами и так далее, подключенными к той же сети электроснабжения.
Высоковольтные многоуровневые преобразователи частоты (ПЧВМ) фирмы ЗАО «ЭЛЕКТРОТЕКС» предназначены для бесступенчатого регулирования скорости асинхронных двигателей с короткозамкнутым ротором различных приводных механизмов (рис. 2). В состав преобразователя частоты серии ПЧВМ входит входной сухой многообмоточный трансформатор, многоуровневый высоковольтный преобразователь частоты и шкаф управления и защиты. Управление двигателем скалярное – по характеристике U/f, задаваемой 8 точками. Регулирование прямое частотное или ПИД-регулирование. Заявлены следующие преимущества: подключение напрямую к сети 6000 В; высокий коэффициент мощности (0,95) во всем диапазоне скоростей; КПД не менее 0,98; синусоидальная форма входного и выходного тока и напряжения; исключена установка дополнительных дорогостоящих входных и выходных фильтров; реализуется функция «подхвата» при глубоких и длительных снижениях напряжения в сети электроснабжения.
Регулирование прямое частотное или ПИД-регулирование. Заявлены следующие преимущества: подключение напрямую к сети 6000 В; высокий коэффициент мощности (0,95) во всем диапазоне скоростей; КПД не менее 0,98; синусоидальная форма входного и выходного тока и напряжения; исключена установка дополнительных дорогостоящих входных и выходных фильтров; реализуется функция «подхвата» при глубоких и длительных снижениях напряжения в сети электроснабжения.
Высоковольтные частотные преобразователи PowerFlex 7000 производит Rockwell Automation для управления высоковольтными асинхронными и синхронными двигателями напряжением 2,4…10,0 кВ в диапазоне мощностей 250…24000 кВт.
Рис. 4. Формы тока и напряжения многоуровневого АИН на асинхронный двигатель 1100 кВ·А, 4160 В. В силовой схеме, которая имеет относительно простую структуру, имеется минимальное количество силовых элементов и отсутствуют высоковольтные электролитические конденсаторы. Возможно использование совместно с ВЧП серийных (производства России или заводов бывшего СССР) электродвигателей без доработки, без согласующих элементов и фильтров.
Высоковольтные частотно-регулируемые приводы HYUNDAI серии N5000 предназначены для плавного пуска и регулирования скорости вращения асинхронных двигателей с короткозамкнутым ротором мощностью 155…3930 кВт с номинальным напряжением 3, 6 и 10 кВ. Данные преобразователи оборудованы полным векторным контролем. Векторное регулирование позволяет управлять двигателем, когда нет четкой зависимости между моментом на валу и скоростью вращения. Этот метод управления позволяет получить расширенный диапазон регулирования частоты при номинальных моментах или даже при кратковременных перегрузках до 150-200 % от номинального момента. Следует отметить, что векторный метод работает оптимально, если введены правильно паспортные величины двигателя и успешно прошло его автотестирование. Векторный метод реализуется путем сложных расчетов, производимых микропроцессором с использованием информации о выходном токе, частоте и напряжении. В инверторе используются биполярные транзисторы с изолированным затвором (БТИЗ или IGBT) с многоуровневой ШИМ-модуляцией и минимальным коэффициентом гармоник (менее 4 %).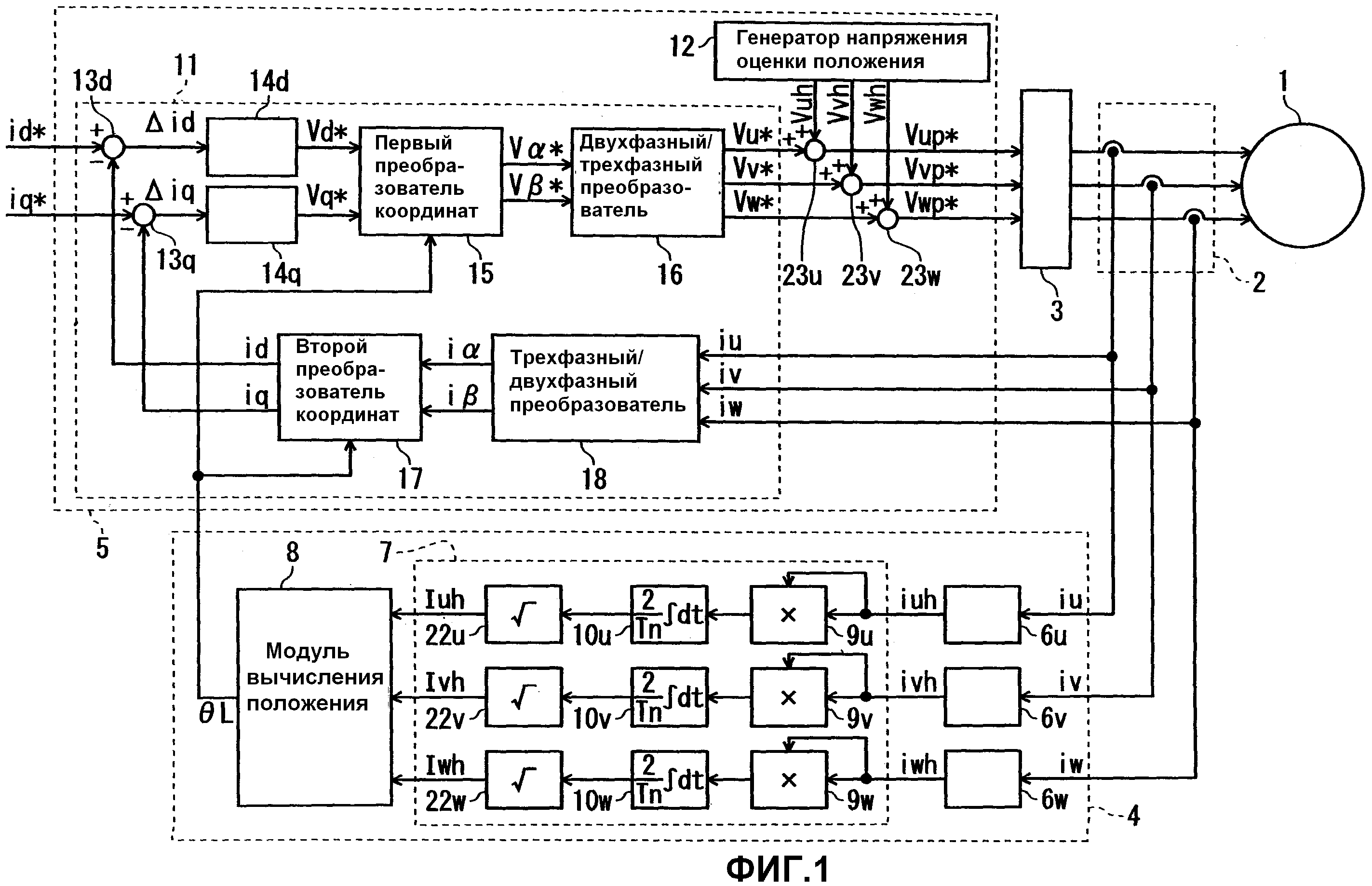
В работах [3, 4, 5] приводятся результаты исследований электромагнитных процессов при переключениях в высоковольтных тиристорных инверторах. Предлагаются способы защиты от перенапряжений при коммутациях.
Общие вопросы теории регулируемого электропривода различных механизмов рассмотрены в работах [1, 3, 4].
Опыт применения, как высоковольтных частотных преобразователей, так и преобразователей низкого напряжения рассмотрен в работах [2, 4]. В основном, в приведенных источниках рассматриваются вопросы энергосбережения. Отмечается, что современные преобразователи частоты позволяют анализировать пусковые и рабочие характеристики электродвигателя, отслеживать изменения в работе исполнительных механизмов в течение срока их эксплуатации, что значительно увеличивает ресурс работы электродвигателей и исполнительных механизмов в целом. В работе [4] изложены положительные результаты опытной эксплуатации преобразователя частоты МИР ПЧ-01 в МУП «Теплокоммунэнерго», г. Омск.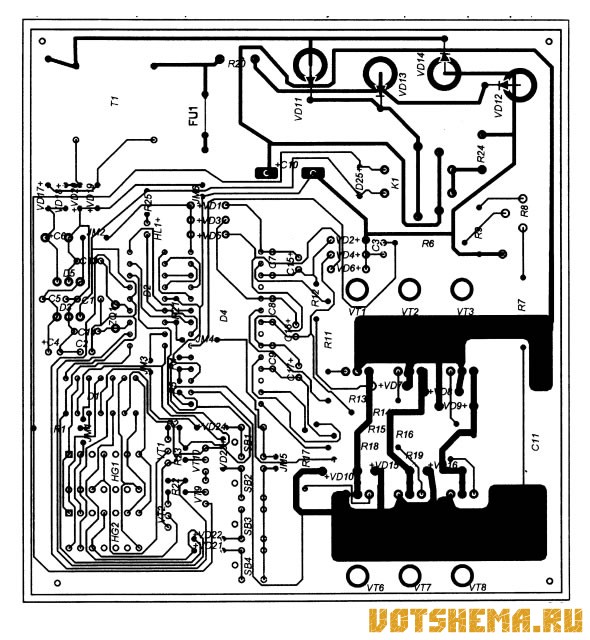
Обзор современного российского рынка преобразователей частоты для электропривода приведен в работах [3, 4]. В странах СНГ производителями высоковольтных преобразователей являются ОАО «Электровыпрямитель», «Триол», Estel Pluss AS.
ОАО «Электровыпрямитель» выпускает новую серию высоковольтных преобразователей частоты, выполненных по двухтрансформаторной схеме с использованием низковольтных ПЧ «Омега». Входной трансформатор преобразует входное напряжение (3 фазы, 6000 В) в пониженное выходное напряжение (3 фазы, 380 В). Силовая часть ПЧ реализована на современных IGBT и диодно-тиристорных модулях, выпускаемых ОАО «Электровыпрямитель». Серия частотно-регулируемых электроприводов РЭН2В на базе двухтрансформаторной схемы (мощность – 160…3200 кВт) предназначена для регулирования частоты вращения асинхронных и синхронных двигателей с напряжением питания 3, 6, 10 кВ. Преобразователи частоты комплектуются входным (сетевым) понижающим и выходным повышающим трансформаторами. Для наращивания мощности преобразователей РЭН2В использовано параллельное соединение группы низковольтных преобразователей. В преобразователях РЭН2В полностью решены специфические вопросы управления и защиты высоковольтной части, равномерного распределения нагрузки между группой низковольтных преобразователей, работы на трансформаторную нагрузку.
В преобразователях РЭН2В полностью решены специфические вопросы управления и защиты высоковольтной части, равномерного распределения нагрузки между группой низковольтных преобразователей, работы на трансформаторную нагрузку.
Электроприводы с использованием ПЧ Триол АТ09 предназначены для управления мощными производственными механизмами (400 — 2500 кВт), оснащенными высоковольтными асинхронными двигателями. Электроприводы Триол АТ09 выполнены по двухтрансформаторной схеме и в них реализованы оптимизированные алгоритмы высокочастотного ШИМ-управления.
Новое поколение ПЧ Estel Pluss AS для высоковольтного асинхронного и синхронного электропривода содержит три фазные секции, соединенные по схеме «звезда». В каждой секции последовательно включены силовые модули, образующие функциональные узлы выпрямителя и инвертора. Питание каждой секции осуществляется от вторичных обмоток трансформатора, первичным напряжением которого является питающая высоковольтная сеть. Входной выпрямитель работает в режиме ШИМ-преобразования. Инвертор работает в режиме ШИМ-синуса, формируя на выходе практически синусоидальный ток.
Инвертор работает в режиме ШИМ-синуса, формируя на выходе практически синусоидальный ток.
На основе анализа известных схем ПЧ авторы статьи [5] считают, что особый интерес представляет «двухтрансформаторная» схема, содержащая последовательно включенные элементы: понижающий трансформатор – низковольтный выпрямитель — инвертор — повышающий трансформатор — электродвигатель. Основным преимуществом подобного решения является возможность применять стандартное оборудование, серийно выпускаемое большим количеством отечественных предприятий. Однако диапазон регулирования двухтрансформаторных схем ограничен соотношением (1:2), поскольку обычные трансформаторы плохо работают на низкой частоте (данный диапазон достаточен для регулирования электроприводов насосов и вентиляторов).
Из отечественных разработок нужно выделить преобразователи ПЧСВ, ПЧСН и ПЧИТ инженерной компании «Технорос» (Санкт-Петербург). Высоковольтные тиристорные преобразователи частоты серии ПЧСВ (рис. 5) предназначены для регулирования частоты вращения механизмов с приводными синхронными двигателями напряжением 6 и 10 кВ и мощностью от 1 до 10 МВт. ПЧСВ построен по схеме вентильного двигателя и включает в себя высоковольтный выпрямитель, инвертор, ведомый сетью и сглаживающий дроссель (ДС) в звене постоянного тока.
ПЧСВ построен по схеме вентильного двигателя и включает в себя высоковольтный выпрямитель, инвертор, ведомый сетью и сглаживающий дроссель (ДС) в звене постоянного тока.
Преобразователи частоты тиристорные серии ПЧИТ (рис. 6) предназначены для плавного пуска, торможения и регулирования частоты вращения асинхронных двигателей с короткозамкнутым ротором, управляющих механизмами в различных отраслях промышленности. Данный тип преобразователя частоты обеспечивает частотное управление скоростью двигателя, активное торможение двигателя с рекуперацией энергии в питающую сеть.
Рис. 5. Высоковольтный тиристорный преобразователь частоты серии ПЧСВ инженерной компании «Технорос»:
ВВ – высоковольтный выключатель ячейки КРУ; РТ – реактор токоограничивающий;
КВ1 — КВ3 – контакторы высоковольтные; ЩСП – щит силовой преобразовательный с системой управления и регулирования; ДС– дроссель сглаживающий;
ШЗП – шкаф защиты от перенапряжений; ШВК – шкаф высоковольтных контакторов;
ТВ – тиристорный возбудитель; Тр – трансформатор питания возбудителя;
СД – синхронный двигатель; ИМ – исполнительный механизм (вентилятор, насос)
Рис. 6. Преобразователь частоты тиристорный серии ПЧИТ инженерной компании «Технорос»:
6. Преобразователь частоты тиристорный серии ПЧИТ инженерной компании «Технорос»:
В – управляемый трехфазный мостовой выпрямитель; АИ – трехфазный мостовой автономный инвертор тока с отсекающими диодами; ДН, ДТ – датчики напряжения и тока; Др – сглаживающий дроссель; РС – регулятор скорости; П1 – преобразователь (устройство) измерения векторов тока и потока двигателя; П2 – преобразователь (устройство) измерения амплитуды Ф и частоты вращения вектора потока; РТ – регулятор тока;
СУВ – система управления выпрямителем; СУИ – система управления инвертором
Анализируя приведенную литературу можно сделать следующие выводы:
1. Из приведенных публикаций следует, что в настоящее время большинство ВЧП имеют типовые структуры с инверторами тока или напряжения;
2. Приведенных публикаций следует, что структура ВЧП в основном определена как с инверторами тока, так и с инверторами напряжения.
3. Проблема электромагнитной совместимости ВЧП с двигателем и питающей сетью решается выбором такой структуры преобразователя и управления им с помощью разнообразных ШИМ, при которой добиваются практически синусоидальных входных и выходных токов и напряжений.
4. Существует довольно большое количество уже разработанных и поставляемых под заказ ВПЧ для управления асинхронными и синхронными двигателями. Чаще всего это продукция иностранных производителей. Сравнение ВЧП отечественных и импортных производителей показывает, что импортные преобразователи, в целом, являются более надежными. Вместе с тем, в большинстве случаев, они являются функционально избыточными, и имеют более высокую стоимость. Можно сказать, что отечественные ПЧ уступают импортным по качеству и надежности, выигрывая в стоимости.
5. Возросшее внимание отечественных разработчиков силовой электроники к проблемам конструирования ВЧП позволяет надеяться, что разрыв в качестве и надежности импортных и отечественных преобразователей будет неуклонно сокращаться. Например, московская компания «Л-Старт» занимается разработкой и производством ВЧП, которые по техническим и эксплуатационным параметрам не уступают аналогичным устройствам японских и европейских производителей, а по ряду характеристик превосходят их.
Литература
1. Лазарев Г.Б. Высоковольтные преобразователи для частотно-регулируемого электропривода. Построение различных систем // Новости электротехники.
2005. № 2 (32). C. 30-36. URL: http://www.news.elteh.ru/arh/2005/32/10.php
2. Народницкий А.Г. Частотно регулируемые приводы и энергораспределительные системы // Цемент и его применение. 2008. № 4. С. 38-41.
3. Шкердин Д.Г. Преобразователи частоты в энергосберегающем приводе насосов // Водоснабжение и санитарная техника. 2004. №7. С. 29-32.
4. Мухамадеев А.Р. Преобразователи частоты и устройства плавного пуска для электроприводов переменного тока // Энергетика Татарстана. 2010. № 17. С. 44-53.
5. Гринштейн Б.И., Колоколкин А.М., Тарасов А.Н. Опыт разработки и внедрения тиристорных преобразователей частоты для пуска и регулирования частоты вращения мощных синхронных машин // Электрические станции. 2005. № 8. С. 45-53.
Статья опубликована в электронном научном журнале «Нефтегазовое дело», 2011, № 3 http://www. ogbus.ru
ogbus.ru
| Автор | Название | Год | Скачать |
| Чан Суан Чунг | Разработка средств оценки эффективности гибридных электрических трансмиссий на основе анализа траекторий движения транспортного средства | 2018 |
автореферат
диссертация
|
| Федорова К.Г. | Применение двухмассовой тепловой модели для организации защиты в частотно-регулируемом асинхронном электроприводе | 2018 |
автореферат
диссертация
|
| Кульманов В.И. | Разработка и исследование микропроцессорной инверторной системы питания с генератором переменной частоты для воздушных судов | 2017 |
автореферат
диссертация
|
| Рассудов Л.Н. | Разработка и исследование методов улучшения точности и динамики прямого сервопривода | 2016 |
автореферат,
диссертация
|
2010-2015г. | |||
|
Лашкевич М.М.
| Разработка системы управления для электротрансмиссии с тяговыми вентильно-индукторными двигателями | 2013 |
автореферат
&диссертация
|
| Сапожников С.С. | Разработка системы управления электроприводом дымососа водогрейного котла | 2013 | автореферат |
| Кураев Н.М. | Исследование и разработка электроприводов с цилиндрическим линейным асинхронным двигателем | 2013 | автореферат |
| Тяпкин М.Г. | Исследование и разработка прецизионного планарного электропривода | 2013 | автореферат |
| Полющенков И.С. | Разработка бездатчикового вентильно-индукторного электропривода с искусственной нейронной сетью | 2013 | автореферат |
Алямкин Д. И. И. | Разработка и исследование двухфазного вентильно – индукторного электропривода насосов горячего водоснабжения | 2012 | диссертация |
| Кузин К.А. | Разработка и исследование систем и алгоритмов управления синхронным частотно-регулируемым электроприводом турбомеханизмов | 2012 | автореферат |
| Холин А.В. | Разработка и исследование электропривода стенда для испытания вертолетных трансмиссий | 2012 | автореферат |
| Силаев Ф.А. | Разработка и исследование системы электроснабжения железнодорожного вагона повышенной комфортности | 2011 | автореферат |
| Боровик А.А. | Многодвигательный электропривод для стана холодной прокатки труб | 2011 | автореферат |
| Галкин А.А. | Исследование безредукторного электропривода лифта с низкоскоростным асинхронным двигателем | 2011 | автореферат |
Кукушкин М. С. С. | Разработка и исследование многокоординатных электроприводов на базе частотно-регулируемых электродвигателей и промышленных информационных сетей | 2011 | автореферат |
| 2005-2010г. | |||
| Толстых О.А. | Разработка и исследование калиброванного электропривода с вентильным двигателем | 2010 | автореферат |
| Штин Е.Н. | Повышение эффективности циркуляционных систем горячего водоснабжения средствами регулируемого электропривода | 2010 | автореферат |
| Бабкин Е.А. | Совершенствование, исследование и диагностирование систем управления асинхронного частотно-регулируемого электропривода механизмов буровой установки | 2010 | автореферат |
| Дроздов А.В. | Разработка системы бездатчикового векторного управления вентильно-индукторным двигателем с независимым возбуждением | 2008 | диссертация |
Шеломкова Л. В. В. | Разработка системы векторного бездатчикового управления асинхронным двигателем | 2008 | автореферат |
| Жарков А.А. | Разработка и исследование вентильно-индукторного электропривода с независимым возбуждением и микроконтроллерным управлением | 2008 | диссертация |
| Махмуд Б. Юнес | Совершенствование электроприводов роботов на основе фаззи-регуляторов и нейронных сетей | 2008 | автореферат |
| Постников Г.В. | Оптимизация позиционных электроприводов автоматизированных систем на основе фаззи-контроллера | 2007 | |
| Панов А.С. | Совершенствование алгоритмов и систем управления взаимосвязанными электроприводами картоноделательной машины | 2007 | |
| Кузьмин И.К. | Энергосберегающий синхронный электропривод шахтной вентиляторной установки | 2007 | |
Корпусов Д. Е. Е. | Разработка и исследование мощного вентильно-индукторного электропривода | 2006 | |
| Докукин А.Л. | Тепловые модели вентильно-индукторных двигателей в электроприводе | 2006 | |
| Кузьмичев В.А. | Разработка методического и аппаратного обеспечения испытаний вентильно-индукторного электропривода | 2006 | |
| Камара А. | Синтез канала управления возбуждением в двухзонном электроприводе постоянного тока | 2006 | |
| Нестеров Е.В. | Разработка вентильно-индукторных двигателей для легких электрических транспортных средств | 2006 | |
| 2000-2005г. | |||
| Резвин С.Б. | Разработка системы комплексной автоматизации кабельной линии на базе преобразователей частоты и контроллеров с сетевыми возможностями | 2005 | |
Фукалов Р.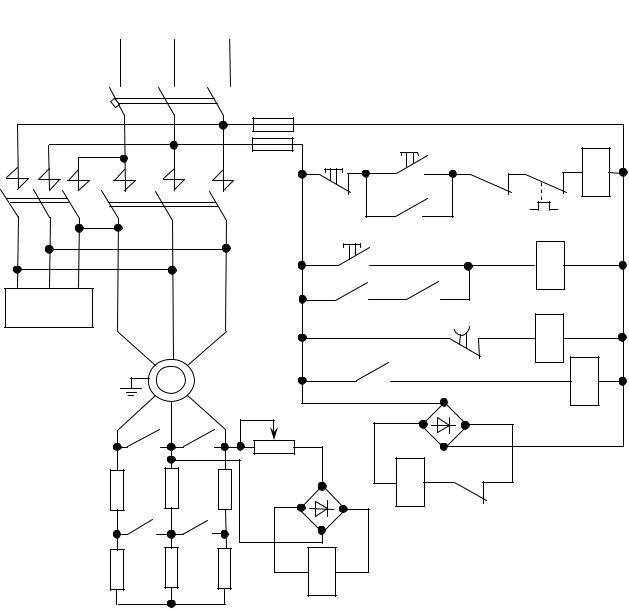 В. В. | Разработка универсальной модульной бездатчиковой системы управления вентильно-индукторного электропривода | 2005 | |
| Никифоров А.Д. | Разработка адаптивной системы управления частотно-регулируемого электропривода | 2005 | |
| Ташлицкий М.М. | Разработка способов экспериментального определения параметров и механических характеристик асинхронных двигателей | 2005 | |
| Попов Е.В. | Модернизация крановых асинхронных электроприводов с использованием полупроводниковых преобразователей | 2005 | |
| Благодаров Д.А. | Разработка электропривода по системе «Непосредственный преобразователь частоты — асинхронный двигатель» для карьерных экскаваторов | 2004 | |
| Дианов А.Н. | Разработка и исследование системы бездатчикового управления вентильным двигателем | 2004 | |
Анучин А. С. С. | Разработка системы управления многофазного вентильно-индукторного привода с промежуточным регулируемым звеном постоянного тока | 2004 |
автореферат,
диссертация
|
| Павленко С.В. | Модернизация главных электроприводов действующего парка карьерных экскаваторов | 2003 | Рук. Ключев В.И. |
| Третьяк Г.А. | Разработка и исследование бездатчикового варианта электропривода по системе «непосредственный преобразователь частоты — асинхронный двигатель» | 2003 | Рук. Миронов Л.М. |
| Уткин С.Ю. | Разработка электронных коммутаторов вентильно-индукторных электроприводов широкого применения | 2002 | Рук. Остриров В.Н. |
| Сарач М.Б. | Разработка системы управления преобразователя частоты с встроенными функциями группового управления оборудованием и косвенного определения технологических параметров | 2002 | Рук. Козаченко В.Ф. Козаченко В.Ф. |
| Трофимов С.А. | Разработка систем управления шаговыми и вентильно-индукторными двигателями на базе специализированных микроконтроллеров и нового поколения силовых модулей | 2002 | Рук. Козаченко В.Ф. |
| Чуев П.В. |
Разработка систем векторного управления асинхронными приводами на базе специализированных сигнальных микроконтроллеров
| 2002 |
Рук. Козаченко В.Ф.
диссертация
|
| Дроздов П.А. | Разработка новых алгоритмов управления вентильно-индукторных электроприводов | 2002 | Рук. Бычков М.Г. |
| Сучков Р.В. | Разработка зарядного устройства для групповой зарядки аккумуляторных батарей транспортных средств | 2001 | Рук. Ильинский Н.Ф. |
«Микроконтроллерное управление электроприводом.
 Учебное пособие» К.Б. Алексеев, 2008 год
Учебное пособие» К.Б. Алексеев, 2008 год
|
Файл загрузил: Sim
| |||||||||||||||
 Обзор системы ЭП на базе двигателя постоянного тока;
Обзор системы ЭП на базе двигателя постоянного тока;
Загружается…
Электрооборудование станков. Электропривод и системы ЧПУ. Книги, справочники, каталогиЭлектронная библиотека машиностроителя на DVD
Электрооборудование станков. Электропривод и системы ЧПУ. Книги, справочники, каталоги. Электронная библиотека машиностроителя
Разделы библиотеки
Петров Л.П. Р. Г. Подзолов, Л. В. Буштян. — М.: Машиностроение, 1978. — 135 с, ил.— (Электроавтоматика станков). Размер: 2,1 МБ
В книге описаны различные способы автоматического управления электрическим торможением наиболее распространенных в станкостроении электроприводов; с асинхронными короткозамкнутыми двигателями для получения быстрой и точной остановки исполнительных механизмов; дан расчет тормозных устройств. Приведены технико-экономические показатели эффективности различных приводов; основное внимание уделено новым способам комбинированного торможения с применением конденсаторов и управляемых вентилей.
Приведены технико-экономические показатели эффективности различных приводов; основное внимание уделено новым способам комбинированного торможения с применением конденсаторов и управляемых вентилей.
А.Э. Кравчик, М.М. Шлаф, В.И. Афонин, Е.А. Соболевская Год издания: 1982 Кол-во страниц: 504 Формат: .djvu Размер: 1.9 Мб
Аннотация: Приведены основные технические данные асинхронных двигателей серии 4А основного исполнения, с повышенным пусковым моментом, с повышенным скольжением, многоскоростных и с фазным ротором. Даны сведения, необходимые для расчета пусковых режимов электродвигателей и выбора нагрузок.
Алиев И.И. Год издания: 2004 Кол-во страниц: 128 Формат: .djvu Размер: 850 Kb
В книге представлены сведения об устройстве и принципе действия трехфазных и однофазных асинхронных двигателей, о расчете характеристик и выборе мощности двигателей при их питании от трехфазной и однофазной сети, о расчете параметров и выборе пусковых и рабочих конденсаторов, о схемах управления и защиты и выборе элементов и схем.
Представлены технические данные о некоторых типах современных асинхронных двигателей, конденсаторов, электрических аппаратов управления и защиты.
Приведены сведения о разработке новейших типов асинхронных энергосберегающих двигателей
Томский политехнический университет
В настоящее время электропривод с двигателями переменного тока и управляемыми полупроводниковыми преобразователями частоты занимает лидирующее положение среди других типов регулируемого электропривода. Интенсивному развитию этого направления способствуют значительные успехи в усовершенствовании традиционных и создании новых силовых управляемых полупроводниковых приборов и интегральных схем, развитии цифровых информационных технологий и разнообразных средств микроконтроллерного управления. Асинхронные двигатели наиболее часто применяются в промышленности и на транспорте из-за своей простоты и надёжности. Однако эффективное управление ими представляет собой довольно сложную задачу и требует создания специальных систем управления.
к.т.н. Е.Г. Акимов (Методические рекомендации)
Поздеев А.Д. Издательство: Энергия Год: 1980 Страниц: 288 Формат: djvu Размер: 5.69 Мб Качество: нормальное
Рассматриваются вопросы, связанные с электрооборудованием современных тяжелых и уникальных металлорежущих станков. Рассматриваются особенности электрооборудования различных групп станков, типовые электроприводы и схемы автоматики.
Для инженерно-технических работников, занятых проектированием и эксплуатацией электрооборудования тяжелых станков.
Сосинкин В.Л., Мартынов Г.М. Год издания: — Кол-во страниц: 101 Формат: .pdf Размер: 1.5 Мб
Аннотация: Даны базовые понятия, координатные оси и координатные системы, достаточно подробно описаны G-функции, вспомогательные и специальные функции. Описаны управление шпинделем и компенсация (коррекция) инструмента.
Э. Л. Тихомиров, В. В. Васильев, Б. Г. Коровин, В. А. Яковлев. — М.: Машиностроение, 1990. — 320 с.: ил.
— 320 с.: ил.
Рассмотрены структуры микропроцессорных систем управления цифровыми электроприводами (ЦЭП) подач станков, требования к ЦЭП подач, основные методы компенсации нелинейностей и синтеза регуляторов ЦЭП, аппаратные средства микропроцессорного управления и измерительные преобразователи координат ЦЭП, программные средства микропроцессорного управления и комплексной наладки ЦЭП. Приводятся резуль -таты исследований на ЭВМ и экспериментальных исследований микропроцессорных ЦЭП подач станков с ЧПУ.
Для инженерно-технических работников, работающих в области систем ЧПУ и автоматизированного электропривода .
Петров И. В. Под ред. проф. В. П. Дьяконова. — М.: СОЛОН-Пресс, 2004. — 256 с: ил. — (Серия «Библиотека инженера»)
Описана практика применения промышленных программируемых контроллеров, широко применяющихся для автоматизации производства. Излагаются языки программирования на основе действующего стандарта МЭК 61131-3 и многочисленные примеры подготовки программ для промышленных программируемых контроллеров.
Для специалистов по автоматизации производственных процессов и производственного оборудования, а также для студентов и преподавателей высших технических заведений.
Мандрыкин С.А. Издательство: Энергия Год: 1965 Размер: 1,5 МБ Формат: djvu Качество: хорошее
В брошюре описан ремонт крупных и средних электродвигателей на электростанциях. Указан порядок разборки и сборки электродвигателей и приспособления, облегчающие и ускоряющие эти операции.
Приведены дефекты, выявляемые при ремонте электродвигателей, и последствия несвоевременного устранения дефектов. Приведены нормы на зазоры в подшипниках, между статором и ротором, на вибрацию с указанием, к чему приведет .несоблюдение этих норм. Описаны ремонт и замена подшипников, правка валов, центровка двигателей с приводным механизмом, определение причин вибрации и методы их устранения.
Брошюра рассчитана на электрослесарей и электромонтеров, занимающихся ремонтом и эксплуатацией электродвигателей.
Семенов Б.Ю. Год издания: 2005 Кол-во страниц: 416 Формат: .djvu Размер: 8.6 Мб
Силовая электроника — стремительно развивающееся направление техники, целью которого является снижение масс и габаритов устройств питания электронной аппаратуры и электродвигателей. Сегодня уже невозможно представить компьютер, видеокамеру, DVD-проигрыватель, телевизор без компактного и надежного импульсного источника. К сожалению, в последние годы наметился острый дефицит литературы на эту тему. Второе издание книги в значительной степени переработано и дополнено. Доступным языком рассказывается об основах проектирования импульсных устройств электропитания, о перспективной элементной базе, особенностях ее применения и оптимальном выборе, приведены практические конструкции. Подробно рассказано о «трудных вопросах» и «подводных камнях» схемотехники. Затронуты также нетрадиционные направления, как, например, создания высокочастотных балластов для ламп Дневного света и электронных корректоров коэффициента мощности.
Гусев Н.В., Букреев В.Г. Год издания: 2007 Кол-во страниц: 213 Формат: .pdf Размер: 4.7 Мб
В пособии приведен обзор концепций систем числового программного управления, характеристики некоторых типов электроприводов ведущих производителей, датчиков перемещения и современных контролеров движения. Представлены основы математического и программного обеспечения для построения инвариантных следящих систем и разработки контроллеров движения. Рассмотрены программная реализация и аппаратное исполнение контроллера движения электроприводами постоянного тока двухкоординатного стола. Приведены имитационные модели и результаты исследований цифро-аналогового следящего электропривода для алгоритмов формирования задающих воздействий при линейной и круговой интерполяции.
Сосонкин В.Л., Мартинов Г.М. Год издания: 2005 Кол-во страниц: 200 Формат: .pdf Размер: 5.48 Мб
Представлены архитектурные решения локальных систем числового программного управления, дан анализ вариантов их интеграции на системном и прикладном уровнях. Рассмотрены особенности новейшего поколения систем ЧПУ. Основное внимание уделено модульному построению однокомпьютерной системы ЧПУ и принципам взаимодействия модулей в рамках открытой архитектуры. Представлены все разделы прикладного программного обеспечения систем ЧПУ. Показано, каким образом понятия предметной области (интерпретатор, интерполятор, языковый процессор и др.) соотносятся с понятиями программирования (объектный тип, атрибут, операция и др.). Охарактеризованы функциональные возможности современных систем ЧПУ.
Рассмотрены особенности новейшего поколения систем ЧПУ. Основное внимание уделено модульному построению однокомпьютерной системы ЧПУ и принципам взаимодействия модулей в рамках открытой архитектуры. Представлены все разделы прикладного программного обеспечения систем ЧПУ. Показано, каким образом понятия предметной области (интерпретатор, интерполятор, языковый процессор и др.) соотносятся с понятиями программирования (объектный тип, атрибут, операция и др.). Охарактеризованы функциональные возможности современных систем ЧПУ.
М. А. Босинзон Издательство: Академия Год: 2008 Страниц: 192 Формат: djvu Размер: 3.03 Мб Качество: нормальное Серия или Выпуск: 2-е издание, стереотипное
Приведены общие сведения и характеристики современных устройств ЧПУ, систем управления металлорежущими станками, станочными модулями, автоматизированными участками и автоматизированными производствами. Отражена специфика профессии оператора станков с ЧПУ.
Для учащихся учреждений начального профессионального образования.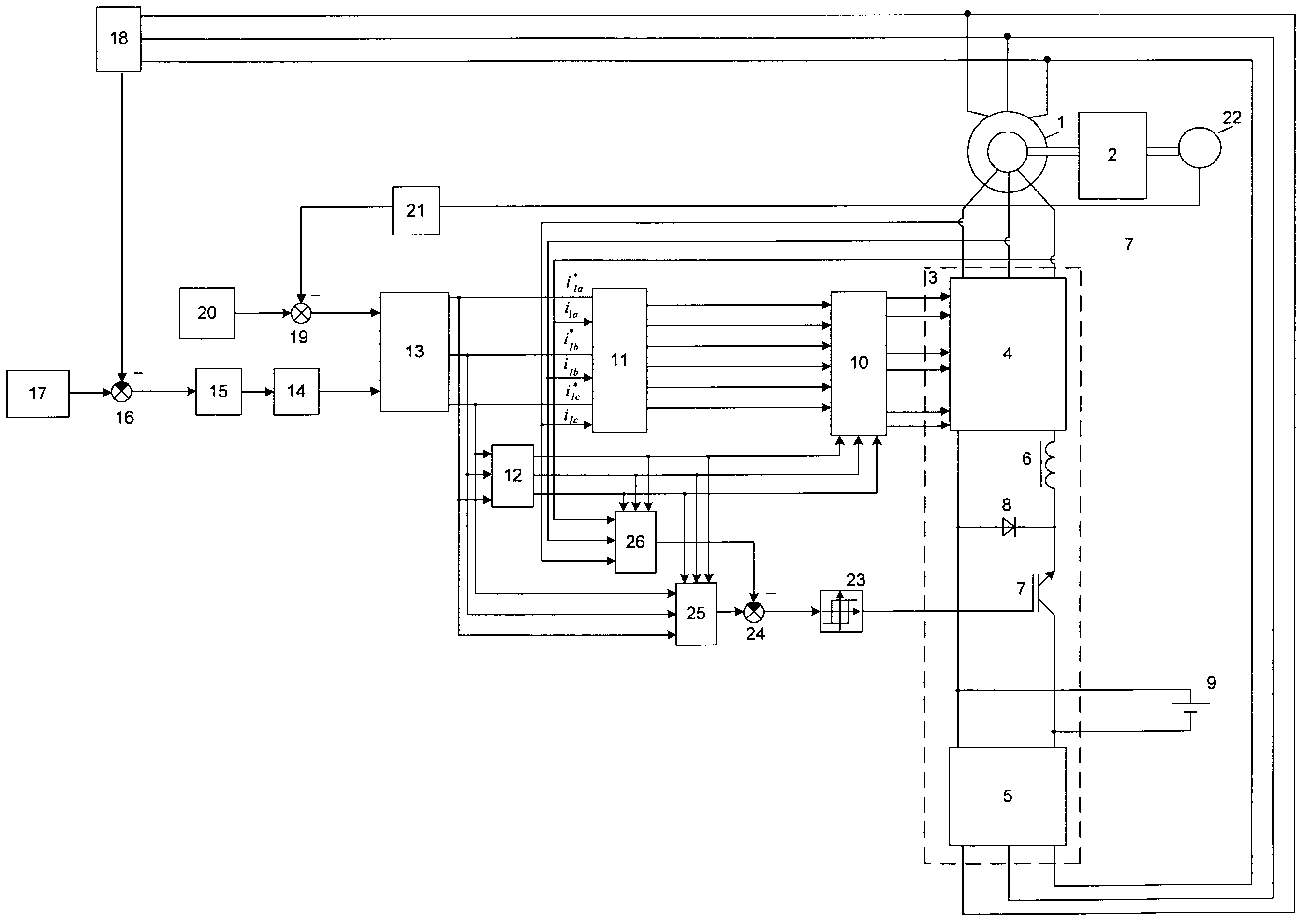 Может быть полезен станочникам широкого профиля, наладчикам, мастерам, инженерам-конструкторам, технологам и программистам.
Может быть полезен станочникам широкого профиля, наладчикам, мастерам, инженерам-конструкторам, технологам и программистам.
Ловыгин А.А. «Эльф» 2006
Ни для кого не секрет, что на полках отечественных книжных магазинов крайне трудно найти литературу по современным технологиям механической обработки, в частности по программированию оборудования с числовым программным управлением и работе с CAD/САМ системами. В лучшем случае вы обнаружите справочники или учебники, повествующие об уже устаревших металлорежущих станках или о теории автоматизации производства. Бывая в командировках на разных предприятиях, мне пришлось столкнуться с еще большим дефицитом знаний по данной теме и огромным желанием людей научиться работать с ЧПУ и CAD/CAM. Я и мои коллеги посоветовались с потенциальными читателями, сформировали круг вопросов и постарались описать максимально просто и доходчиво конструкцию современного фрезерного станка с ЧПУ, процесс создания управляющей программы и основы работы в CAD/САМ системе. Эту книгу мы адресуем всем, кто хочет быстро разобраться с основами автоматизированного программирования обработки, а так же студентам и выпускникам технических колледжей и ВУЗов, инженерам-технологам, инженерам-конструкторам, операторам и наладчикам станков с ЧПУ, руководителям участков механической обработки. Некоторые технические моменты мы сознательно упростили и обобщили, поскольку считаем, что для начинающего технолога-программиста важнее понять суть работы с ЧПУ, а все тонкости и нюансы, можно изучить непосредственно на производстве, исходя из поставленных задач и собственной любознательности.
Эту книгу мы адресуем всем, кто хочет быстро разобраться с основами автоматизированного программирования обработки, а так же студентам и выпускникам технических колледжей и ВУЗов, инженерам-технологам, инженерам-конструкторам, операторам и наладчикам станков с ЧПУ, руководителям участков механической обработки. Некоторые технические моменты мы сознательно упростили и обобщили, поскольку считаем, что для начинающего технолога-программиста важнее понять суть работы с ЧПУ, а все тонкости и нюансы, можно изучить непосредственно на производстве, исходя из поставленных задач и собственной любознательности.
О.П. Михайлов, Р.Т. Орлова, А.В. Пальцев. Под ред. Б.И. Черпакова. — М.: Высш. шк., — 1989. — 111 с: ил
В пособии изложены требования к электроприводам станков и промышленных роботов, дается описание всех основных типов электроприводов, применяемых в ГПС. Большое внимание уделено технической характеристике электродвигателей, используемых для электроприводов.
Книга предназначена для преподавателей и мастеров производственного обучения профессионально-технических училищ.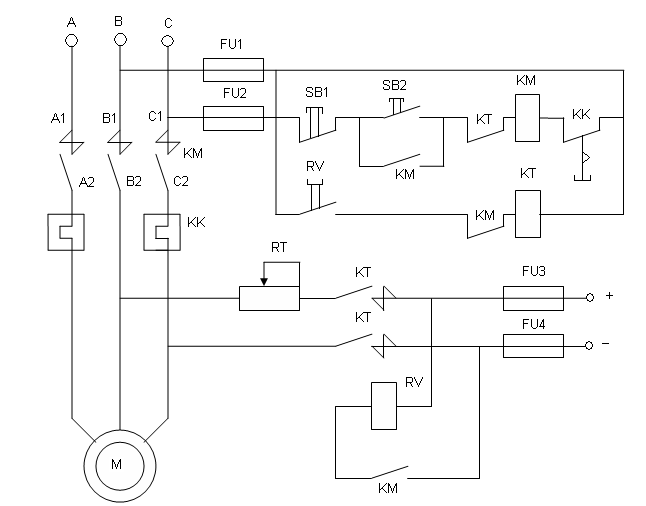
Черпаков Б.И., 1989 г.
В пособии изложены требования к электроприводам станков и промышленных роботов, дается описание всех основных типов электроприводов, применяемых в ГПС. Большое внимание уделено технической характеристике электродвигателей, используемых для электроприводов. Книга предназначена для преподавателей и мастеров производственного обучения профессионально-технических училищ.
Башарин А.В. и др. Издательство: Энергоиздат Год: 1982 Размер: 4,8 МБ Формат: djvu Качество: среднее
Рассмотрены принципы построения автоматических систем управления электроприводами Дано математическое описание двигателей, преобразователей к других типовых узлов как элементов АСУ Рассмотрены типовые системы стабилизации скорости, программные и следящие системы управления электроприводом, а также системы регулирования тока, момента и других параметров Изложены методы расчета в освещены вопросы машинного проектирования систем управления электроприводом.
Книга предназначена в качестве учебного пособия для студентов специальности «Электропривод и автоматизация промышленных установок». Она может быть полезна студентам других специальностей, а также инженерам и научным сотрудникам, занятым разработкой, исследованием и эксплуатацией АСУ электропривода кн.
Дьяков В.А. Год издания: 1991 Кол-во страниц: 160 Формат: .djvu Размер: 1.6 Мб
Даны практические расчеты по электрооборудованию, приведены теоретические сведения, методика расчета, расчетные примеры и важнейшие справочные данные. Седьмое издание (6-е в 1985 г.) дополнено сведениями о стабилизаторах, фильтрах и др.
Кол-во страниц: 38 Формат: .pdf Размер: 2.2 Мб
Аннотация: В техническом описании приводятся: комплектность электропривода, условия работы, технические данные, конструкция, устройство и принцип работы, электрический монтаж, приведены принципиальные электрические схемы и графики.
Хайнц Петцольд Год издания: 1984 Кол-во страниц: 45 Формат: . djvu Размер: 0.78 Мб
djvu Размер: 0.78 Мб
Целью данного учебного пособия является последовательное ознакомление начинающего квалифицированного рабочего с комплексной темой «Техника числового управления» и оказание помощи в применении на практике приобретенных теоретических знаний.
Кенно Т. Год издания: 1987 Кол-во страниц: 200 Формат: .djvu Размер: 2.7 Мб
Рассмотрены вопросы анализа электромагнитных процессов в шаговых двигателях различного типа, приведено большое количество конструктивных решений. Значительное внимание уделено микропроцессорным системам управления, алгоритмам их работы и схемной реализации систем управления. Приведены примеры применения шаговых двигателей с микропроцессорным управлением.
Бернштейн-Коган В. С, Драницкий Л. В., Кузнецова Т. А. Б 51., М., «Энергия», 1969.
В брошюре описаны схемы, особенности обслуживания и ремонта электрооборудования координатно-расточных и резьбошлифовальных станков, выпускаемых Московским заводом координатно-расточных станков
Особое внимание уделено станкам, выпускаемым крупными сериями.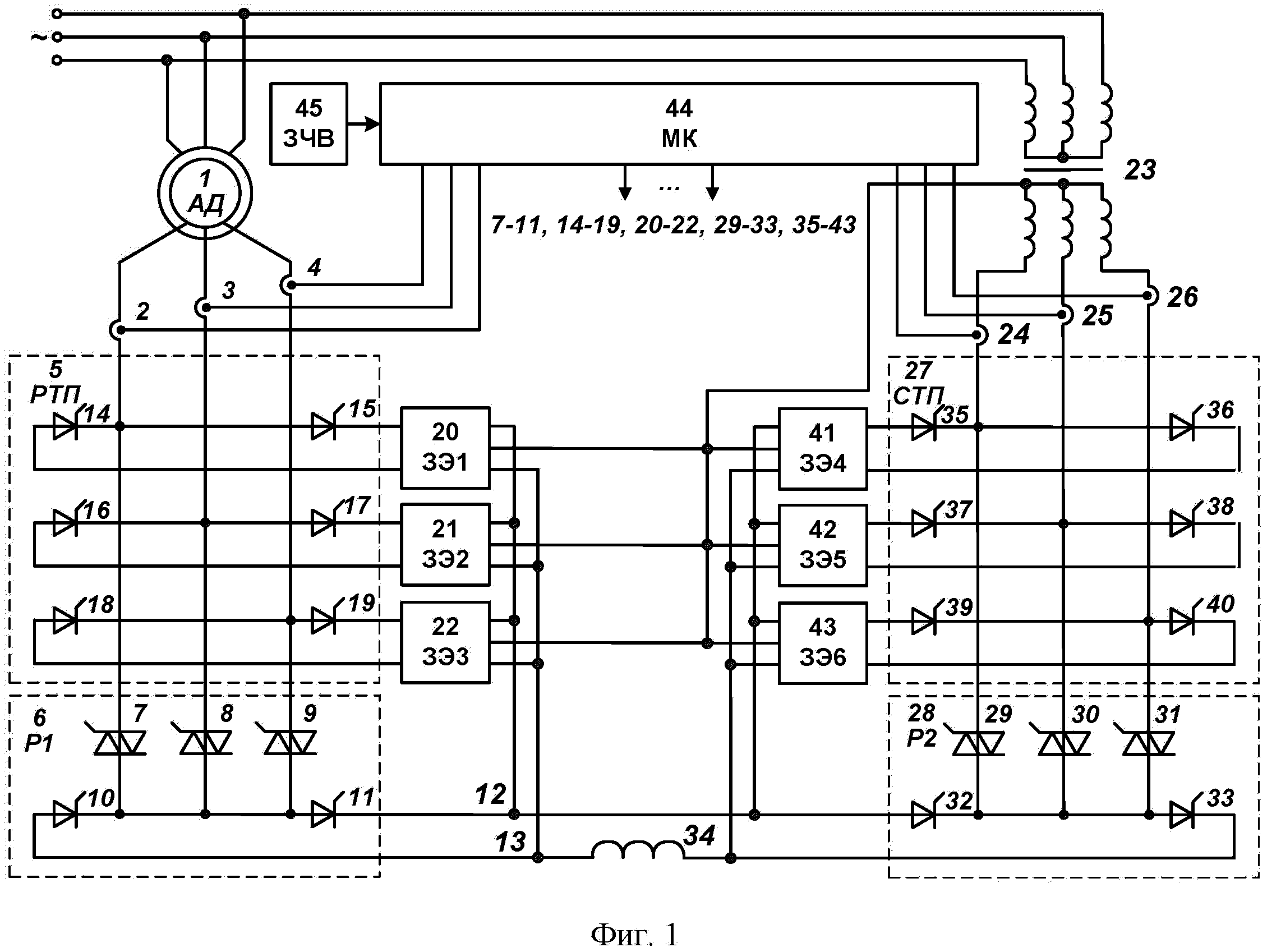 Приводятся схемы характерных электроприводов и систем управления станков. Указываются наиболее часто встречающиеся неисправности, методы их обнаружения и устранения.
Приводятся схемы характерных электроприводов и систем управления станков. Указываются наиболее часто встречающиеся неисправности, методы их обнаружения и устранения.
Брошюра предназначена для электромонтеров, бригадиров и наладчиков, обслуживающих прецизионные станки.
Чернов Е.А., Кузьмин В.П., Синичкин С.Г./Справочное пособие. -Горький: Волго-Вятское кн. изд-во, 1986. -271с.:ил. Формат: djvu Размер: 17.78 Мб Качество: cреднее
Справочное пособие посвящено описанию принципов работы и изложению методик наладки наиболее распространенных в станкостроении приводов: «Кемрон», «БТУ 3601», «Мезоматик» и пр.
Книга рассчитана на инженерно-технических работников, занимающихся проектированием, наладкой и эксплуатацией электрооборудования станков с ЧПУ, электриков-наладчиков промышленных предприятий, а также студентов специализирующихся в области электропривода.
Игнатов В.А. и др. Издательство: Высшая школа Год: 1991 Страниц: 94 Формат: djvu Размер: 3. 07 Мб ISBN: 5-06-001881-4 Качество: нормальное
07 Мб ISBN: 5-06-001881-4 Качество: нормальное
Приведены сведения об автоматизированном электроприводе, различных двигателях, аппаратуре релейно-контактного и бесконтактного управления, зашиты и автоматики станков; рассмотрены вопросы программного управления станками от ЭВМ; даны сведения о монтаже, наладке и эксплуатации различного электрооборудования, а также о мерах безопасности при его обслуживании. Учебник может быть использован для профессионального обучения рабочих на производстве.
Управление скоростью асинхронного двигателя с помощью микроконтроллера pic
Регулировка скорости трехфазного асинхронного двигателя
Контроль скорости трехфазного асинхронного двигателя с помощью микроконтроллера pic18 статья поможет вам разработать свой проект. Трехфазные асинхронные двигатели очень популярны в промышленности, бытовой технике и тяжелой промышленности. Трехфазные асинхронные двигатели в основном используются в приложениях, основанных на движении. Трехфазные асинхронные двигатели прочны и надежны в приложениях, основанных на движении.Асинхронные двигатели работают с определенной скоростью, когда на асинхронный двигатель подается питание. Но главная проблема — это контроль скорости асинхронного двигателя. Эта техническая статья поможет вам разработать драйвер переменной скорости для асинхронного двигателя с использованием микроконтроллера pic.
Трехфазные асинхронные двигатели прочны и надежны в приложениях, основанных на движении.Асинхронные двигатели работают с определенной скоростью, когда на асинхронный двигатель подается питание. Но главная проблема — это контроль скорости асинхронного двигателя. Эта техническая статья поможет вам разработать драйвер переменной скорости для асинхронного двигателя с использованием микроконтроллера pic.
Последние разработки в области силовой электроники сделали управление скоростью асинхронного двигателя очень простым. Силовая электроника улучшила динамические и установившиеся характеристики асинхронного двигателя. Например, в домашней стиральной машине необходимо контролировать скорость на разных этапах стирки.Это тоже домашнее применение асинхронного двигателя.
Методы регулирования скорости асинхронного двигателя
Управление скоростью асинхронного двигателя очень сложно из-за его нелинейных характеристик. В основном используются три метода управления скоростью асинхронного двигателя:
- Метод контроля напряжения
- Метод переменного напряжения и переменной частоты (VVVF) (этот метод используется в приложениях с разомкнутым контуром). Это может быть реализовано маломощными микроконтроллерами pic
 Это может быть реализовано маломощными микроконтроллерами pic
Это может быть реализовано маломощными микроконтроллерами pic.
Считывая номинальное напряжение и номинальную частоту асинхронного двигателя с его паспортной таблички, вы можете получить представление о скорости асинхронного двигателя в об / мин.
Типы асинхронных двигателей
По конструкции ротора асинхронные двигатели бывают двух типов: асинхронные двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Статор у обоих двигателей практически одинаковый.
- Двигатель с короткозамкнутым ротором: В основном асинхронные двигатели, используемые в промышленности и быту, относятся к типу с короткозамкнутым ротором. Это потому, что они имеют простую прочную конструкцию.
- Асинхронные электродвигатели с контактным кольцом: Контактные кольца, установленные на валу двигателя, являются основным отличием между электродвигателями с контактным кольцом и короткозамкнутым ротором.
Как управлять скоростью асинхронного двигателя
Управление скоростью асинхронного двигателя осуществляется двумя способами, как я упоминал ранее в этой статье. Но самый популярный метод — это переменное напряжение и переменная частота (ВВВФ). В этом методе трехфазное переменное напряжение преобразуется в постоянное с использованием схемы трехфазного диодного мостового выпрямителя. Блок конденсаторов используется для фильтрации пульсаций переменного тока для постоянного напряжения. Это постоянное напряжение преобразуется обратно в трехфазный переменный ток переменного напряжения и переменной частоты с помощью H-моста, как показано на рисунке ниже:
Но самый популярный метод — это переменное напряжение и переменная частота (ВВВФ). В этом методе трехфазное переменное напряжение преобразуется в постоянное с использованием схемы трехфазного диодного мостового выпрямителя. Блок конденсаторов используется для фильтрации пульсаций переменного тока для постоянного напряжения. Это постоянное напряжение преобразуется обратно в трехфазный переменный ток переменного напряжения и переменной частоты с помощью H-моста, как показано на рисунке ниже:
Схема выше представляет собой трехфазный мост H инвертора источника напряжения.Он состоит из шести переключателей, управление которыми осуществляется с помощью ШИМ, генерируемого микроконтроллером PIC.
Управление скоростью асинхронного двигателя с помощью блок-схемы микроконтроллера pic
Блок-схема управления скоростью трехфазного асинхронного двигателя приведена ниже. Потенциометр, подключенный к АЦП микроконтроллера PIC, используется для регулировки скорости асинхронного двигателя.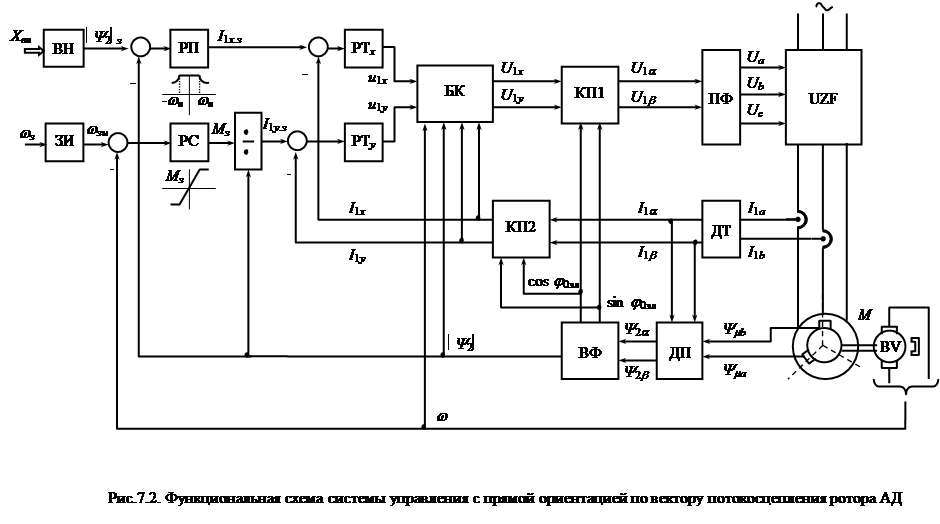 Микроконтроллер PIC считывает значение потенциометра и устанавливает новую скорость асинхронного двигателя, изменяя опорную частоту асинхронного двигателя.
Микроконтроллер PIC считывает значение потенциометра и устанавливает новую скорость асинхронного двигателя, изменяя опорную частоту асинхронного двигателя.
Трехфазный диодный мостовой выпрямитель преобразует переменный ток в постоянный. Трехфазный инвертор напряжения преобразует постоянный ток в переменный на основе сигнала ШИМ-контроллера от микроконтроллера PIC. Схемы драйвера IGBT или MOSFET используются для управления MOSFET с минимальным временем перехода из включенного в выключенное состояние или из выключенного во включенное состояние. Итак, чтобы управлять скоростью асинхронного двигателя с помощью микроконтроллера pic, вы должны знать, как спроектировать схему трехфазного мостового выпрямителя? Как спроектировать инвертор источника трехфазного напряжения? Как использовать схемы драйвера затвора? и как использовать микроконтроллер PIC для генерации сигналов PWM для моста H.Для полной работы посмотрите это видео
 com/embed/kqM8cn_tiVA?version=3&rel=1&showsearch=0&showinfo=1&iv_load_policy=1&fs=1&hl=en-US&autohide=2&start=440&wmode=transparent» allowfullscreen=»true» sandbox=»allow-scripts allow-same-origin allow-popups allow-presentation»/>
com/embed/kqM8cn_tiVA?version=3&rel=1&showsearch=0&showinfo=1&iv_load_policy=1&fs=1&hl=en-US&autohide=2&start=440&wmode=transparent» allowfullscreen=»true» sandbox=»allow-scripts allow-same-origin allow-popups allow-presentation»/>
свяжитесь со мной по телефону [адрес электронной почты] , чтобы купить код и симуляцию
IRJET-Запрошенная вами страница не найдена на нашем сайте.
IRJET приглашает статьи из различных инженерных и технологических дисциплин, научных дисциплин для Тома 8, выпуск 2 (февраль-2021)
Отправить сейчас
IRJET Vol-8, выпуск 2, Февраль 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Импакт-фактор научного журнала: 7.529 «на 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает участников различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 2 ( Февраль-2021)
Отправить сейчас
IRJET Vol-8 Выпуск 2, февраль 2021 г.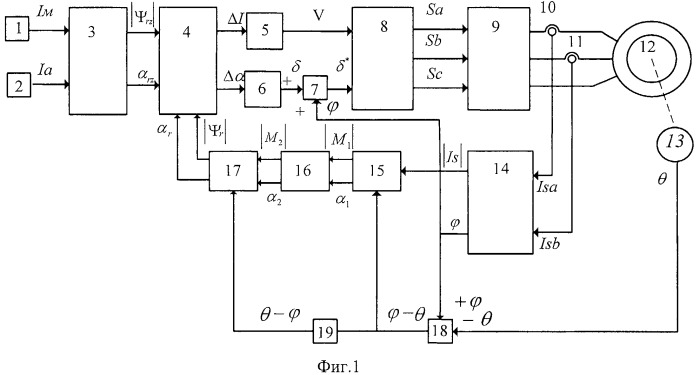 Публикация продолжается …
Публикация продолжается …
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.529 «на 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает участников различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 2 ( Февраль-2021)
Отправить сейчас
IRJET Vol-8 Выпуск 2, февраль 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.529 «на 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает участников различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 2 ( Февраль-2021)
Отправить сейчас
IRJET Vol-8 Выпуск 2, февраль 2021 г. Публикация продолжается . ..
..
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.529 «на 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает участников различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 2 ( Февраль-2021)
Отправить сейчас
IRJET Vol-8 Выпуск 2, февраль 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.529 «на 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает участников различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 2 ( Февраль-2021)
Отправить сейчас
IRJET Vol-8 Выпуск 2, февраль 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.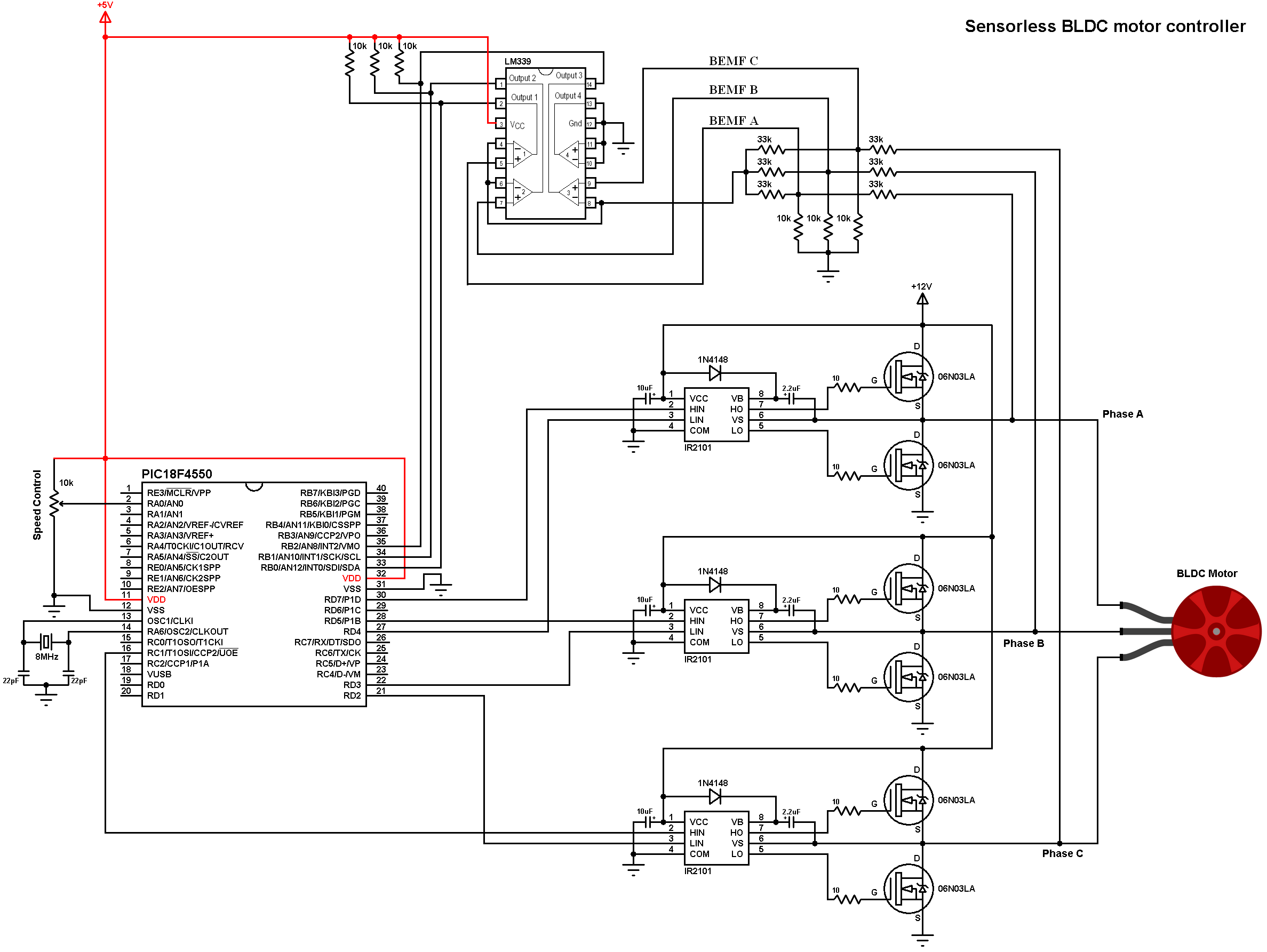 529 «на 2020 год.
529 «на 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает участников различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 2 ( Февраль-2021)
Отправить сейчас
IRJET Vol-8 Выпуск 2, февраль 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.529 «на 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает участников различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 2 ( Февраль-2021)
Отправить сейчас
IRJET Vol-8 Выпуск 2, февраль 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.529 «на 2020 год.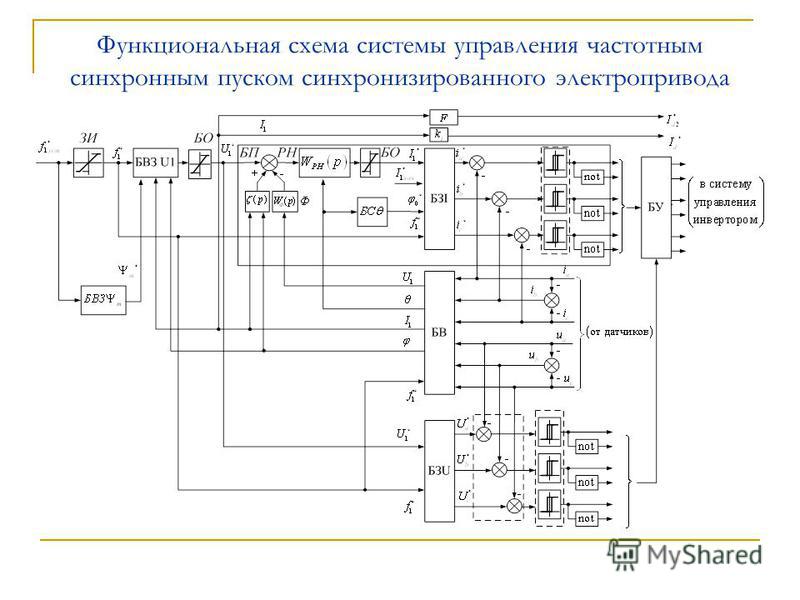
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы менеджмента качества.
Разработка и внедрение схемы управления напряжением / частотой вращения асинхронного двигателя на основе микроконтроллера dspic33fj32mc204 для системы вентиляции транспортных средств
Заявление о конфликте интересов
Автор (ы) заявили об отсутствии потенциальных конфликтов интересов с
в отношении исследования, авторства и / или публикации этой статьи
.
Финансирование
Автор (ы) не получил финансовой поддержки для исследования,
авторства и / или публикации этой статьи.
ORCID iD
Tolga O
¨zer https://orcid.org/0000-0001-7607-6894
Ссылки
1. Qi Z. Достижения в области систем кондиционирования воздуха и тепловых насосов —
tem in электромобили — обзор. Продлить Sust Energ Rev
2014; 38: 754–764.
2. Чжан Т., Гао Ц. , Гао Ц. и др. Состояние и развитие
, Гао Ц. и др. Состояние и развитие
интегрированного управления температурным режимом электромобилей от
BTM до HVAC.Appl Therm Eng 2015; 88: 398–409.
3. Тиана З., Гана В., Жанга Х и др. Исследование интегрированной системы терморегулирования
с аккумулятором
охлаждения и рекуперацией отработанного тепла двигателя для электрического транспортного средства
cle. Appl Therm Eng 2018; 136: 16–27.
4. Патакор Ф.А., Сулейман М. и Ибрагим М. Адаптивный режим скольжения-
для непрямого полевого управления индукционным двигателем
. В: Студенческая конференция по исследованиям и разработкам
, Сайберджая, Малайзия, 19–20 декабря
2011.
5. Win T, Sabai N и Maung HN. Анализ частотного трехфазного асинхронного двигателя
. Мир
Acad Sci Eng Technol 2008; 42: 647–651.
6. Патил П.М. и Куркуте С.Л. Регулировка скорости трехфазного асинхронного двигателя
с использованием однофазного источника питания с активной коррекцией коэффициента мощности
.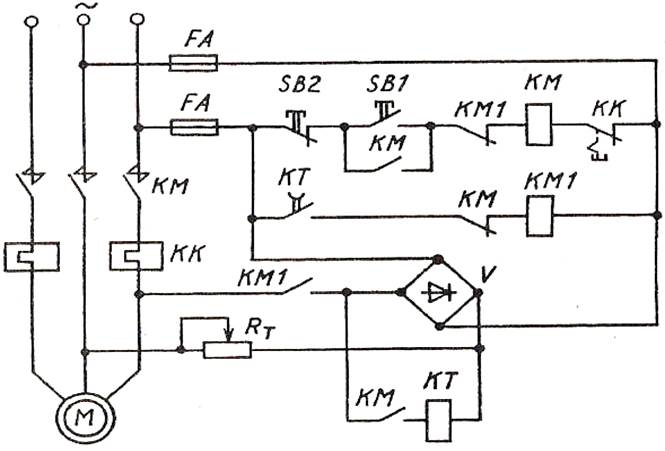 ACSE J 2006; 6: 23–32.
ACSE J 2006; 6: 23–32.
7. Йедамале П. Регулировка скорости трехфазного асинхронного двигателя
с помощью микроконтроллеров PIC18. Microchip Technology
Inc, 2002 г., http: // ww1.microchip.com/downloads/en/App
Notes / 00843a.pdf
8. Чжао Дж, Ван С, Линь Ф и др. Новый интегрированный регулятор скорости скольжения
для индукционных машин с векторным управлением
. В: Общее собрание энергетического общества,
Сан-Диего, Калифорния, 24–29 июля 2011 г., стр. 1–6. Нью-Йорк:
IEEE.
9. Пан С.И., Пан С.Ф., Сайм Х.В. и др. Двоичный регулятор скорости —
троллер для трехфазного асинхронного двигателя. В: Студенческое совещание
по исследованиям и разработкам (SCOReD), Шах
Алам, Малайзия, 17 июля 2002 г., стр.200–203. Нью-Йорк:
IEEE.
10. Suetake M, da Silva IN и Goedhel A. Встроенная компактная нечеткая система на основе DSP
и ее применение для управления скоростью U / f асинхронного двигателя
. IEEE Trans Indus
IEEE Trans Indus
Electron 2011; 58; 750–760.
11. Infineon Technologies AG. Эффективные решения для промышленного управления двигателями и приводами
(B158-H9357-G3-X-7600),
2014, https://www.infineon.com/dgdl/Infineon-Motor_
Control_Drives-ABR-v01_00 -EN.pdf? fileId = 5546d4625
607bd13015656400e9c0ba2
12. McCleer PJ. Электроприводы для насосов, вентиляторов и компрессоров
нагрузок в автомобильной промышленности. В: Труды
международного симпозиума IEEE по промышленной электронике
(ISIE ’95), Афины, 10–14 июля 1995 г.
13. Дэйли С. Автомобильные системы кондиционирования и климат-контроля
. Oxford: Butterworth-Heinemann, 2006.
14. Zhang Z, Wang J, Feng X и др.Решения для электрических систем кондиционирования воздуха
автомобилей: обзор. Renew Sust
Energ Rev 2018; 91: 443–463.
15. Сингх С. и Моханти АР. Контроль шума HVAC с использованием натуральных материалов
для улучшения качества звука в салоне автомобиля.
ity. Appl Acoust 2018; 140: 100–109.
16. Шао Дж. Усовершенствованный бесколлекторный бесколлекторный двигатель постоянного тока
на базе микроконтроллера для автомобильных приложений.
катионов. IEEE Trans Indus Appl 2006; 42 (5): 1216–1221.
17. Choi J, You S, Hur J, et al. Разработка и изготовление двигателя и привода
BLDC для автомобильной промышленности.
В: Международный симпозиум по промышленной электронике, Виго,
4–7 июня 2007 г.
18. Цуй В., Гонг Й. и Сюй М.Х. Бесщеточный двигатель постоянного тока
с бифилярной обмоткой на постоянном магните
для охлаждения двигателей. IEEE Trans Magnet 2012;
48 (11): 3348–3351.
19. Ван Х., Пекарек С. и Фахими Б.Многослойное управление приводом асинхронного двигателя
: стратегический шаг для автомобильных приложений.
катионов. IEEE Trans Power Electron 2006; 21 (3): 676–686.
20. Диалло Д., Бенбузид МЭХ и Макуф А. Устойчивая к сбоям архитектура управления
Устойчивая к сбоям архитектура управления
для приводов асинхронных двигателей
в автомобильных приложениях. IEEE Trans Veh Technol
2004; 53 (6): 1847–1855.
21. Джаннати М., Анбаран С.А., Асгари С.Х. и др. Обзор методов регулирования скорости
для эффективного управления однофазными асинхронными двигателями
: эволюция, классификация, сравнение
.Обновите Sust Energ Rev 2017; 75: 1306–1319.
22. Ласку С., Джафарзаде С., Фадали М.С. и др. Прямое управление крутящим моментом
с линеаризацией обратной связи для приводов асинхронного двигателя
. IEEE Trans Power Electron 2017; 32 (3): 2072–2080.
23. Lekhchinea S, Bahib T, Abadliab I, et al. Фотоэлектрическая батарея
система накопления энергии, работающая от асинхронного двигателя
с приводом от нечеткого скользящего режима управления. Int J Hydr
Energ 2017; 42 (13): 8756–8764.
24. Джайн С., Карампури Р. и Сомасекхар В. Т. Интегрированный алгоритм управления
Т. Интегрированный алгоритм управления
для одноступенчатой фотоэлектрической насосной системы
с использованием асинхронного двигателя с открытой обмоткой. IEEE Trans
Indus Electron 2016; 63 (2): 956–965.
25. Ван X, Вэй Ф, Ян Дж. И др. Исследование и разработка привода асинхронного двигателя с высоким коэффициентом мощности
на базе управления U / f
. В: Материалы 19-й международной конференции по электрическим машинам и системам (ICEMS)
, Чиба,
Япония, 13–16 ноября 2016 г.
Таблица 4. Измеренные значения частоты и скорости.
Частота (Гц) 19 25 29 33 36 41 46 50,3 55,6 58 64 65
Скорость (об / мин) 579766 836 961 1083 1237 1359 1483 1651 1729 1895 1910
8 Измерение и управление
% PDF -1,3
%
670 0 объект
>
endobj
xref
670 103
0000000016 00000 н.
0000002430 00000 н.
0000002643 00000 п.
0000002784 00000 н.
0000002815 00000 н.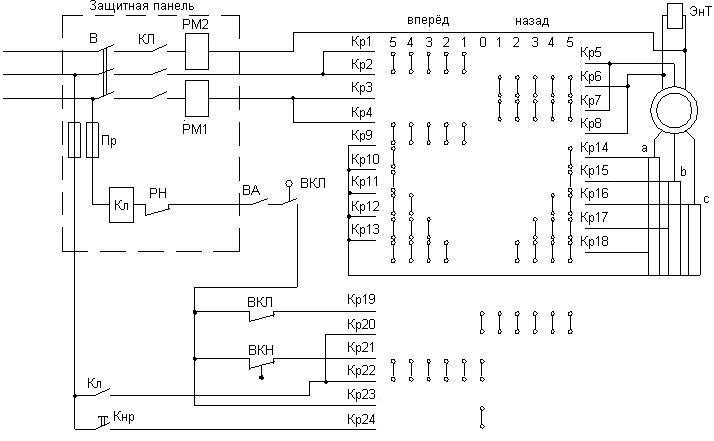
0000002872 00000 н.
0000003625 00000 н.
0000003880 00000 н.
0000003947 00000 н.
0000004086 00000 н.
0000004192 00000 п.
0000004348 00000 п.
0000004408 00000 п.
0000004529 00000 н.
0000004709 00000 н.
0000004875 00000 н.
0000004992 00000 н.
0000005104 00000 п.
0000005229 00000 н.
0000005382 00000 п.
0000005477 00000 н.
0000005635 00000 н.
0000005737 00000 н.
0000005869 00000 н.
0000006012 00000 н.
0000006161 00000 п.
0000006294 00000 н.
0000006434 00000 н.
0000006575 00000 н.
0000006694 00000 н.
0000006806 00000 н.
0000006936 00000 н.
0000007101 00000 п.
0000007206 00000 н.
0000007340 00000 н.
0000007447 00000 н.
0000007593 00000 н.
0000007787 00000 н.
0000007885 00000 н.
0000008026 00000 н.
0000008190 00000 п.
0000008319 00000 н.
0000008476 00000 н.
0000008584 00000 н.
0000008681 00000 н.
0000008778 00000 н.
0000008898 00000 н.
0000008993 00000 н.
0000009089 00000 н.
0000009182 00000 н.
0000009275 00000 н.
0000009369 00000 п.
0000009463 00000 п.
0000009557 00000 н.
0000009651 00000 п.
0000009745 00000 н.
0000009839 00000 п.
0000009933 00000 н.
0000010027 00000 п.
0000010121 00000 п.
0000010215 00000 п.
0000010309 00000 п.
0000010404 00000 п.
0000010498 00000 п.
0000010593 00000 п.
0000010772 00000 п.
0000010972 00000 п.
0000012059 00000 п.
0000013162 00000 п.
0000013355 00000 п.
0000013644 00000 п.
0000013875 00000 п.
0000013940 00000 п.
0000014166 00000 п.
0000016036 00000 п.
0000016246 00000 п.
0000017337 00000 п.
0000017728 00000 п.
0000017974 00000 п.
0000018342 00000 п.
0000018365 00000 п.
0000018575 00000 п.
0000019670 00000 п.
0000020351 00000 п.
0000021500 00000 н.
0000021522 00000 п.
0000022580 00000 п.
0000022603 00000 п.
0000023725 00000 п.
0000023748 00000 п.
0000024881 00000 п.
0000024903 00000 п.
0000025914 00000 п.
0000025936 00000 п.
0000026142 00000 п.
0000026825 00000 п.
0000027872 00000 н.
0000027894 00000 п.
0000028963 00000 п.
0000028985 00000 п.
0000029125 00000 п.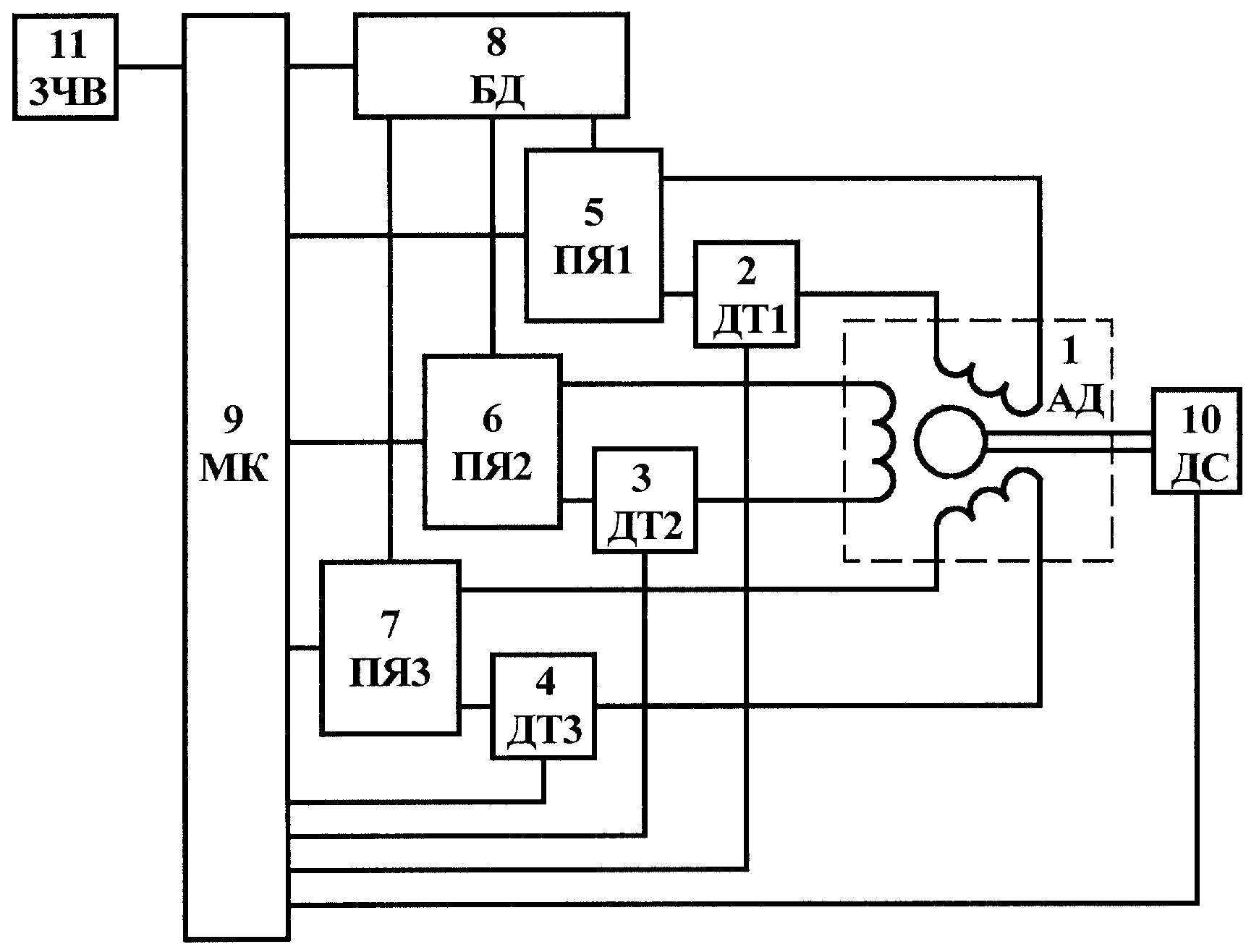
0000002913 00000 н.
0000003603 00000 п.
трейлер
]
>>
startxref
0
%% EOF
671 0 объект
>
endobj
672 0 объект
a_
% PDF-1.6
%
470 0 obj>
endobj
xref
470 92
0000000016 00000 н.
0000002945 00000 н.
0000003084 00000 н.
0000003275 00000 н.
0000003309 00000 н.
0000003355 00000 н.
0000003409 00000 н.
0000003444 00000 н.
0000003675 00000 н.
0000003786 00000 н.
0000003864 00000 н.
0000003940 00000 н.
0000004017 00000 н.
0000004094 00000 н.
0000004171 00000 п.
0000004248 00000 н.
0000004325 00000 н.
0000004402 00000 н.
0000004479 00000 н.
0000004556 00000 н.
0000004633 00000 н.
0000004710 00000 н.
0000004787 00000 н.
0000004864 00000 н.
0000004941 00000 н.
0000005018 00000 н.
0000005199 00000 н.
0000005330 00000 н.
0000006032 00000 н.
0000006109 00000 п.
0000006405 00000 н.
0000006585 00000 н.
0000008087 00000 н.
0000008813 00000 н.
0000009543 00000 н.
0000009734 00000 п.
0000009924 00000 н.
0000011523 00000 п.
0000013157 00000 п.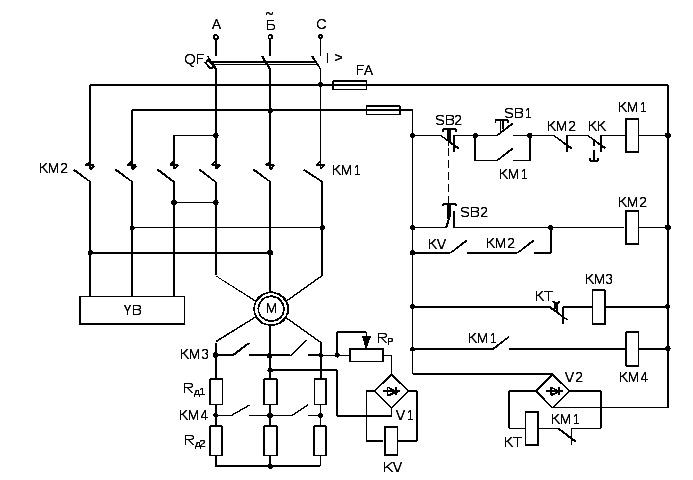
0000014705 00000 п.
0000015272 00000 п.
0000015308 00000 п.
0000015693 00000 п.
0000015769 00000 п.
0000017501 00000 п.
0000018727 00000 п.
0000019228 00000 п.
0000019415 00000 п.
0000020172 00000 п.
0000021564 00000 п.
0000024234 00000 п.
0000028296 00000 п.
0000028525 00000 п.
0000028709 00000 п.
0000034469 00000 п.
0000034526 00000 п.
0000034612 00000 п.
0000034694 00000 п.
0000034741 00000 п.
0000034838 00000 п.
0000034955 00000 п.
0000035066 00000 п.
0000035163 00000 п.
0000035282 00000 п.
0000035389 00000 п.
0000035526 00000 п.
0000035662 00000 п.
0000035812 00000 п.
0000035954 00000 п.
0000036069 00000 п.
0000036190 00000 п.
0000036310 00000 п.
0000036409 00000 п.
0000036510 00000 п.
0000036666 00000 п.
0000036753 00000 п.
0000036871 00000 п.
0000036991 00000 п.
0000037098 00000 п.
0000037222 00000 п.
0000037382 00000 п.
0000037507 00000 п.
0000037606 00000 п.
0000037704 00000 п.
0000037803 00000 п.
0000037922 00000 п.
0000038075 00000 п.
0000038173 00000 п.
0000038271 00000 п.
0000038383 00000 п.
0000038502 00000 п.
0000002183 00000 п.
трейлер
] >>
startxref
0
%% EOF
561 0 obj> поток
0Oj f’6ǽPk,? C] K>} `P4k1AfmS» m $ + = k 5 [O ({S5 [rRY6
Микроконтроллерный сервопривод прямого управления крутящим моментом
Робототехника стала неотъемлемой частью автомобильной промышленности в нескольких задачах, таких как погрузочно-разгрузочные работы, сварка, покраска и сборка деталей.Следовательно, знания и навыки управления электродвигателями в этих манипуляторах необходимы студентам бакалавриата-электротехники. В настоящее время цифровой сигнальный процессор (DSP) является основным чипом в промышленных приводах управления двигателями; однако реализация алгоритмов управления DSP может быть довольно сложной задачей для опытного программиста, тем более для новичка. По этой теме было проведено много исследований, хотя авторы обычно сосредотачиваются на двигателях на основе DSP с использованием популярных методов управления, таких как управление с ориентацией на поле (FOC).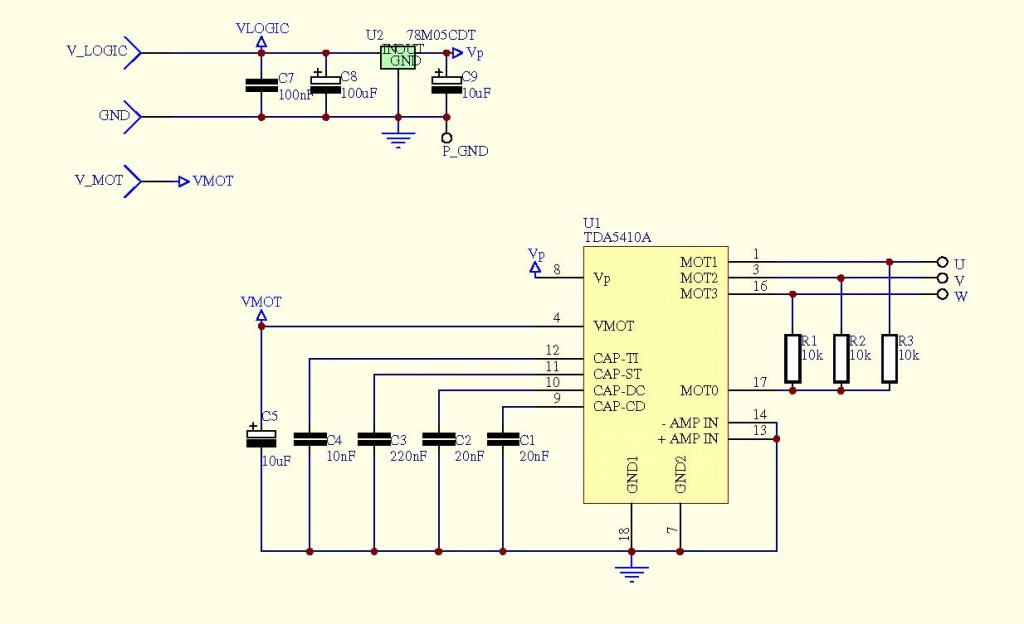 Несмотря на высокую эффективность, этот подход обычно применяется для последипломного образования из-за его сложной структуры и функциональности. В этой статье авторы представляют модульную конструкцию сервопривода на недорогом микроконтроллере общего назначения с использованием метода прямого управления крутящим моментом (DTC), альтернативы, известной большей простотой и откликом по крутящему моменту по сравнению с FOC. Дизайн системы был основан на языке Micropython, что позволило сделать структуру программного обеспечения более управляемой, а код — более понятным.Этот дизайн будет полезен студентам и исследователям, интересующимся дизайном управления моторикой.
Несмотря на высокую эффективность, этот подход обычно применяется для последипломного образования из-за его сложной структуры и функциональности. В этой статье авторы представляют модульную конструкцию сервопривода на недорогом микроконтроллере общего назначения с использованием метода прямого управления крутящим моментом (DTC), альтернативы, известной большей простотой и откликом по крутящему моменту по сравнению с FOC. Дизайн системы был основан на языке Micropython, что позволило сделать структуру программного обеспечения более управляемой, а код — более понятным.Этот дизайн будет полезен студентам и исследователям, интересующимся дизайном управления моторикой.
1. Введение
Хорошо известно, что роботизированные машины становятся важной и важной частью нашей повседневной жизни. Роботы-манипуляторы, особенно в таких отраслях промышленности, как автомобилестроение, используются в самых разных областях, таких как транспортировка материалов, дуговая и точечная сварка, покраска и сборка деталей.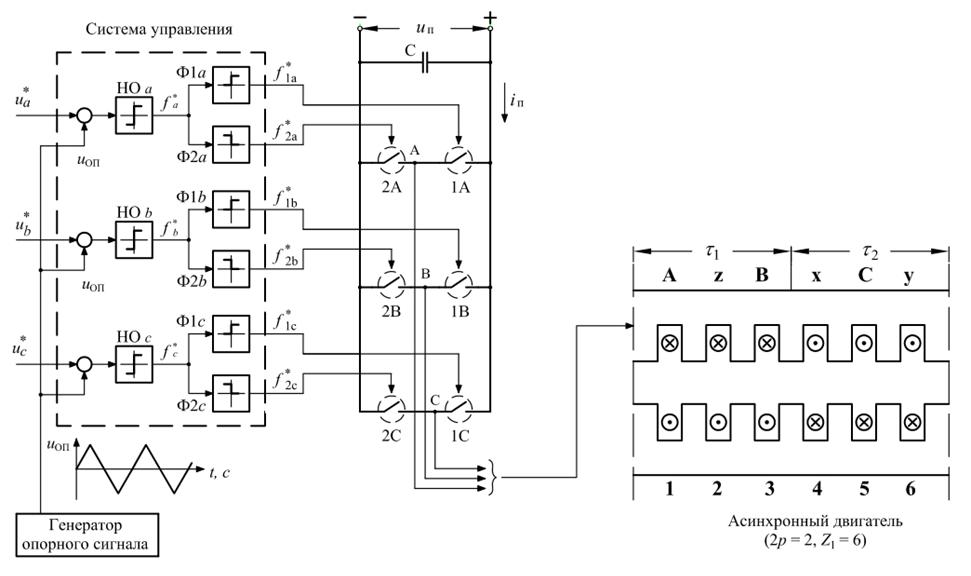 Практически любая задача, которая может быть повторяющейся, сложной или опасной для человека, обычно требует использования какого-либо роботизированного оборудования [1].По этой причине для студентов-электротехников первостепенное значение имеет изучение основ управления промышленными серводвигателями.
Практически любая задача, которая может быть повторяющейся, сложной или опасной для человека, обычно требует использования какого-либо роботизированного оборудования [1].По этой причине для студентов-электротехников первостепенное значение имеет изучение основ управления промышленными серводвигателями.
Для достижения быстрых и точных движений в роботе серводвигатели управляются с использованием высокопроизводительных методов, таких как управление, ориентированное на поле [2, 3]. Этот метод позволяет контролировать скорость двигателя при поддержании постоянного крутящего момента. Хотя FOC обычно используется в промышленных системах управления двигателями из-за высокой эффективности, его физическая реализация может быть довольно сложной из-за сложной математики.Кроме того, он требует быстрого и надежного процессора и больших усилий при проектировании [3]. По этим причинам, проектирование сервопривода на основе оптоволоконных кабелей — это тема, обычно зарезервированная для аспирантов или аспирантов инженерного образования.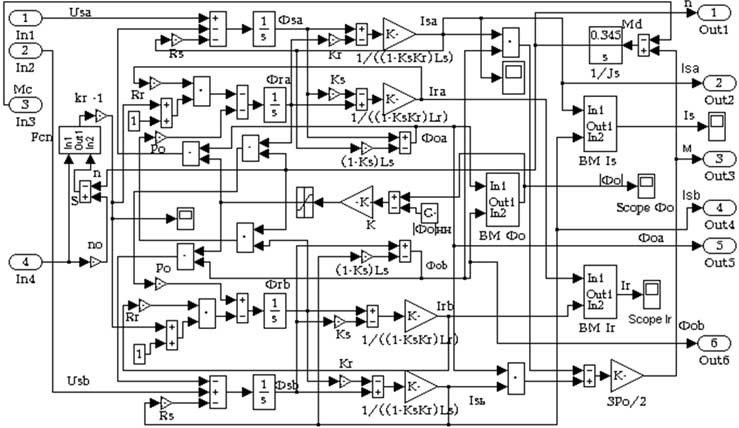
Прямое управление крутящим моментом (DTC) — еще один высокоэффективный метод управления двигателем, который может быть не таким популярным или широко распространенным, как FOC; однако он имеет много достоинств, таких как более упрощенная структура, низкая вычислительная сложность, быстрое время отклика и хорошие динамические характеристики [4]. Это позволяет реализации потребовать менее мощный процессор [5] и менее опытного программиста для разработки программного обеспечения.DTC имеет незначительные недостатки по сравнению с FOC, такие как сложность управления двигателем на низких скоростях, переменная частота переключения и высокочастотная пульсация, присутствующая в сигналах магнитного потока и крутящего момента [3]. Было предложено несколько методов для преодоления этих проблем в классических приводах DTC; однако в основном теряется динамика крутящего момента и простота структуры алгоритма [2, 3].
В этой статье авторы представляют прототип сервоконтроллера, основанный на классической методике DTC.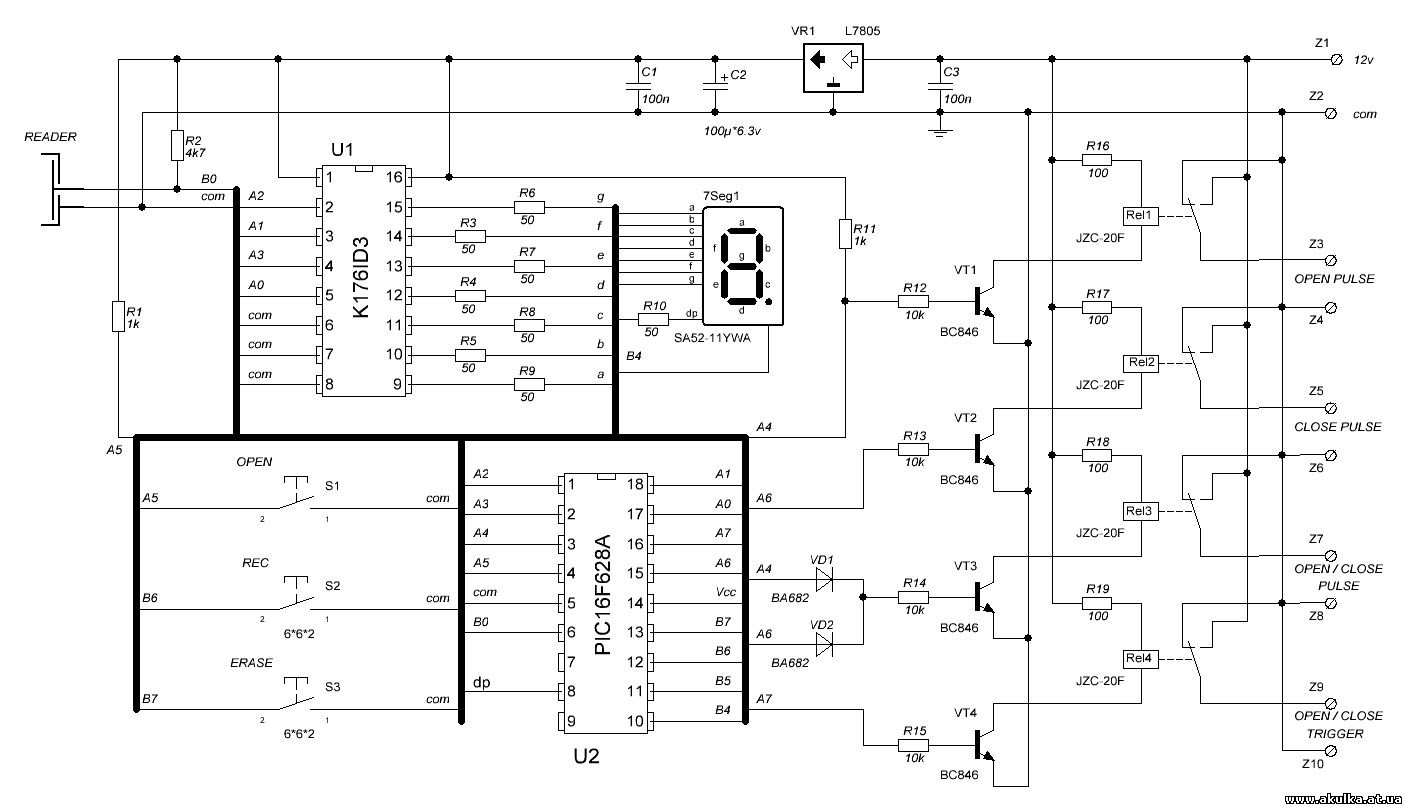 Используемое электронное устройство — Espressif ESP32, 32-битный недорогой встроенный процессор.Для полного кодирования DTC использовался язык программирования Micropython. Экспериментальные результаты были проведены для проверки эффективности дизайна. Это позволило реализовать удобный для пользователя контроллер с открытым исходным кодом для синхронных двигателей с постоянными магнитами (PMSM). Хотя вышеупомянутые недостатки технологии DTC присутствуют, целью этого проекта является разработка модульного испытательного стенда DTC для образовательных целей. Это позволит получить фундаментальное представление о DTC, а также упростить реализацию и экспериментальную проверку будущих улучшений.
Используемое электронное устройство — Espressif ESP32, 32-битный недорогой встроенный процессор.Для полного кодирования DTC использовался язык программирования Micropython. Экспериментальные результаты были проведены для проверки эффективности дизайна. Это позволило реализовать удобный для пользователя контроллер с открытым исходным кодом для синхронных двигателей с постоянными магнитами (PMSM). Хотя вышеупомянутые недостатки технологии DTC присутствуют, целью этого проекта является разработка модульного испытательного стенда DTC для образовательных целей. Это позволит получить фундаментальное представление о DTC, а также упростить реализацию и экспериментальную проверку будущих улучшений.
2. Стратегии управления двигателем
Промышленные двигатели переменного тока используются в широком спектре приложений, которые работают с постоянной скоростью независимо от нагрузки, например, вентиляторы или насосы. Но есть также случаи, когда может потребоваться регулирование скорости или крутящего момента, и в этом случае требуется моторный привод. В настоящее время производители используют несколько методов для управления движением, два из которых наиболее распространены — скалярное управление и векторное управление [6].
В настоящее время производители используют несколько методов для управления движением, два из которых наиболее распространены — скалярное управление и векторное управление [6].
Скалярное управление основано на математических выражениях, описывающих машину в установившемся режиме.В этом типе управления нет обратной связи двигателя; следовательно, управление крутящим моментом неэффективно [7]. Регулирование скорости осуществляется путем изменения соотношения напряжения и частоты (В / Гц), так что это отношение всегда остается постоянным. Хотя эти моторные приводы просты и экономичны, регулировка скорости составляет всего около 3 процентов от базовой частоты двигателя, и, более того, крутящий момент значительно уменьшается [8]. По этой причине этот метод не подходит для высокоточных приложений, таких как промышленные роботы-манипуляторы или металлообрабатывающие центры.
Альтернативно, методы векторного управления, такие как FOC, более мощные и эффективные, хотя алгоритм управления значительно сложнее, чем V / Hz [6].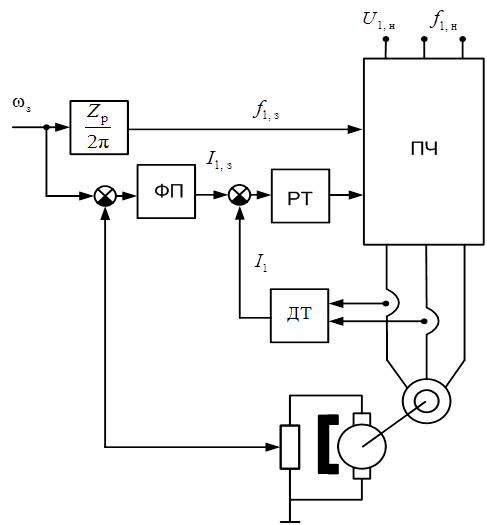 Эта методология, разработанная Блашке [9] в начале 1970-х годов для асинхронных машин, представляет собой замкнутую систему; Выходные сигналы двигателя, такие как напряжение, ток и положение вала, постоянно контролируются для оценки пространственных векторов тока и магнитного потока. Основная идея состоит в том, чтобы переориентировать эти векторы перпендикулярно друг другу, чтобы достичь максимального крутящего момента на ампер независимо от скорости двигателя [3].
Эта методология, разработанная Блашке [9] в начале 1970-х годов для асинхронных машин, представляет собой замкнутую систему; Выходные сигналы двигателя, такие как напряжение, ток и положение вала, постоянно контролируются для оценки пространственных векторов тока и магнитного потока. Основная идея состоит в том, чтобы переориентировать эти векторы перпендикулярно друг другу, чтобы достичь максимального крутящего момента на ампер независимо от скорости двигателя [3].
В отличие от скалярного управления, FOC основан на математических выражениях, которые описывают модель установившегося и переходного состояния машины. Этот метод не только управляет величиной и угловой скоростью, но также контролирует мгновенное положение пространственных векторов напряжения, тока и магнитного потока, обеспечивая более стабильное и точное управление скоростью и крутящим моментом [2].
Хотя FOC — это высокопроизводительная и хорошо зарекомендовавшая себя технология, широко применяемая в силовой электронике, хорошо известно, что некоторые особенности затрудняют реализацию в моторном приводе.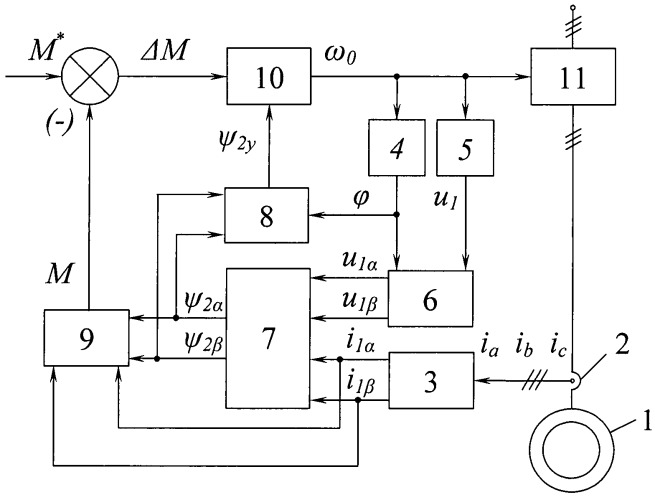 Например, он имеет каскадную архитектуру, которая включает блоки преобразования координат, пропорционально-интегральные (PI) контроллеры, которые содержат множество настраиваемых параметров, регуляторы тока и генераторы сигналов с широтно-импульсной модуляцией (PWM), что увеличивает сложность реализации и время исполнения [10]. Поэтому для ВОК обычно требуется специализированное электронное устройство, оптимизированное для обработки цифровых сигналов в реальном времени. Такое устройство обычно представляет собой DSP, поскольку его архитектура усовершенствована для такого рода задач.В других случаях программируемая вентильная матрица (FPGA) также может быть хорошей альтернативой, учитывая, что в ней можно спроектировать настраиваемые параллельные операции для уменьшения времени выполнения [11–13]. Основное требование для использования этих устройств — определенный опыт работы с языками программирования, такими как C ++ для DSP; для ПЛИС это обычно будет либо VHDL (язык описания аппаратного обеспечения сверхвысокой скорости ИС), либо Verilog [14, 15].
Например, он имеет каскадную архитектуру, которая включает блоки преобразования координат, пропорционально-интегральные (PI) контроллеры, которые содержат множество настраиваемых параметров, регуляторы тока и генераторы сигналов с широтно-импульсной модуляцией (PWM), что увеличивает сложность реализации и время исполнения [10]. Поэтому для ВОК обычно требуется специализированное электронное устройство, оптимизированное для обработки цифровых сигналов в реальном времени. Такое устройство обычно представляет собой DSP, поскольку его архитектура усовершенствована для такого рода задач.В других случаях программируемая вентильная матрица (FPGA) также может быть хорошей альтернативой, учитывая, что в ней можно спроектировать настраиваемые параллельные операции для уменьшения времени выполнения [11–13]. Основное требование для использования этих устройств — определенный опыт работы с языками программирования, такими как C ++ для DSP; для ПЛИС это обычно будет либо VHDL (язык описания аппаратного обеспечения сверхвысокой скорости ИС), либо Verilog [14, 15].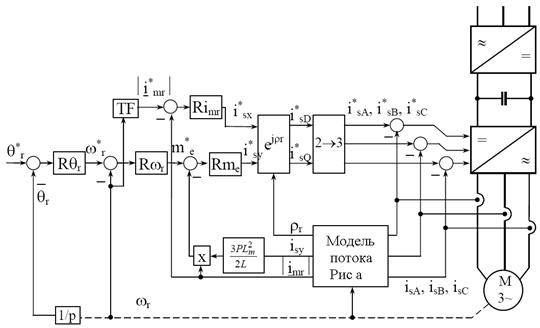
3. Классический принцип DTC
DTC — это стратегия управления двигателем, которая работает иначе, чем FOC.Он был предложен в середине 80-х годов прошлого века И. Такахаши для управления асинхронными двигателями [16]. Основная идея DTC заключается в оценке пространственных векторов магнитного потока статора и электромагнитного момента и управления их величиной по отдельности и независимо с использованием контроллеров гистерезиса [17, 18]. Выходы контроллеров гистерезиса применяются непосредственно к заранее определенной таблице для выбора оптимального вектора напряжения для инвертора источника напряжения (VSI). С его помощью векторы крутящего момента и магнитного потока контролируются напрямую и поддерживаются в двух диапазонах гистерезиса [19].
В DTC нет необходимости в контроллерах PI или регуляторах тока. Кроме того, поскольку код неисправности находится в системе отсчета статора, преобразование координат не применяется. Кроме того, из-за возможности прямого управления крутящим моментом и магнитным потоком модулятор PWM не требуется [20–22]. По этим причинам время выполнения меньше, а отклик динамического крутящего момента выше по сравнению с FOC [23]. Блок-схема классической стратегии DTC показана на рисунке 1.
По этим причинам время выполнения меньше, а отклик динамического крутящего момента выше по сравнению с FOC [23]. Блок-схема классической стратегии DTC показана на рисунке 1.
3.1. Оценка крутящего момента и магнитного потока
Алгоритм DTC довольно прост.Процесс начинается с измерения двух линий трехфазного тока двигателя ( i a , i b ). Значения преобразуются из трехфазной системы отсчета статора ( a , b , c ) в двухфазную систему отсчета ( α , β ) как
Напряжение промежуточного контура ( V dc ) также измеряется и преобразуется в двухфазную систему отсчета; вместе с последним вектором применяется к VSI ( S , S б , S с ), опорным напряжением компоненты двухфазной получаются как
Для оценки статора магнитного потока vector () следующее выражение применяется с использованием сопротивления статора, напряжения и тока ( R s , V s , I s ) как
Однако поскольку стратегия DTC должна быть реализована в цифровом виде, это выражение должно быть сформулировано как дискретная операция. Поэтому, изменив интегрирование на накопленную сумму и используя двухфазные эталонные компоненты напряжения и тока статора, его можно переписать следующим образом: где n — это обозначение для обозначения текущей дискретной выборки, а n + 1 следующий дискретный образец. Что касается T s , он представляет собой время выборки, где его значение основано на таких факторах, как скорость микроконтроллера и время выполнения алгоритма.
Поэтому, изменив интегрирование на накопленную сумму и используя двухфазные эталонные компоненты напряжения и тока статора, его можно переписать следующим образом: где n — это обозначение для обозначения текущей дискретной выборки, а n + 1 следующий дискретный образец. Что касается T s , он представляет собой время выборки, где его значение основано на таких факторах, как скорость микроконтроллера и время выполнения алгоритма.
Теперь, используя компоненты магнитного потока, вычисленные в (4) и (5), общая величина вектора магнитного потока статора будет
Кроме того, угол вектора магнитного потока может быть вычислен с помощью следующего выражения:
Это Угол имеет большое значение, поскольку помогает определить, в каком секторе расположен вектор магнитного потока.
Для оценки электромагнитного момента используются опорные компоненты двухфазного тока и магнитного потока и пары полюсов двигателя ( p ) как
После оценки крутящего момента и магнитного потока они сравниваются с соответствующими опорными значениями. для получения погрешности крутящего момента () и погрешности магнитного потока (). Эти значения погрешности будут вводиться в гистерезисные компараторы.
для получения погрешности крутящего момента () и погрешности магнитного потока (). Эти значения погрешности будут вводиться в гистерезисные компараторы.
3.2. Компараторы гистерезиса
В DTC компараторы гистерезиса используются как быстрый и простой эквивалент ПИ-регуляторов, используемых в FOC.Их функция — ограничить величину ошибок крутящего момента и магнитного потока значениями между двумя пределами. Узкие полосы гистерезиса приводят к гладкой синусоидальной форме волны тока и крутящего момента, хотя они также вызывают высокие частоты переключения и большие потери переключения [10]. Следовательно, гистерезисные компараторы должны иметь соответствующие пределы для хорошей работы DTC.
Выход регулятора потока () имеет два возможных значения, 0 или 1, в зависимости от того, находится ли погрешность потока () ниже нижнего или верхнего предела, соответственно.Напротив, выход регулятора крутящего момента () имеет три возможных значения, -1, 1 или 0, в зависимости от того, находится ли ошибка крутящего момента () ниже нижнего предела, выше верхнего предела или между обоими значениями соответственно. Оба контроллера гистерезиса показаны на рисунке 2.
Оба контроллера гистерезиса показаны на рисунке 2.
Выходные значения обоих контроллеров вместе с пространственным размещением вектора магнитного потока используются для выбора оптимального вектора напряжения для VSI из таблицы векторов.
3.3. Оптимальный выбор вектора
Пространство вращения вектора потока разделено на шесть равноотстоящих секторов (1–6), содержащих шесть активных векторов (от V 1 до V 6 ) и два нулевых вектора (V 0 и V 7 ).На рисунке 3 показано, как векторы напряжения распределяются в каждом секторе.
Для выбора оптимального вектора для применения к VSI используются выходы гистерезиса (). Угол вектора магнитного потока также требуется, но только для определения того, в каком секторе расположен вектор магнитного потока.
Как крутящий момент, так и магнитный поток можно контролировать напрямую, выбирая соответствующий вектор активного напряжения и регулируя их величину в соответствующих пределах гистерезиса.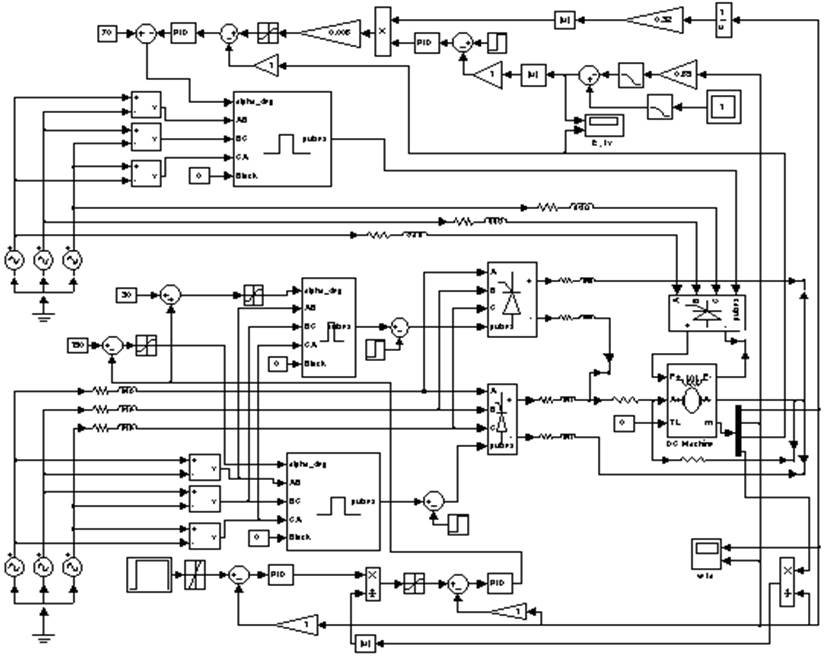 Когда нулевой вектор применяется к VSI, он служит мягким переходом от одного состояния переключения к следующему.Также они предотвращают короткое замыкание в шине постоянного тока из-за задержки времени выключения силовых переключателей [24, 25].
Когда нулевой вектор применяется к VSI, он служит мягким переходом от одного состояния переключения к следующему.Также они предотвращают короткое замыкание в шине постоянного тока из-за задержки времени выключения силовых переключателей [24, 25].
Чтобы понять влияние вектора напряжения на вектор магнитного потока или крутящего момента, представлен пример. На рисунке 3 вектор магнитного потока расположен в секторе 1 и в настоящее время вращается против часовой стрелки. Из таблицы оптимальных векторов (Таблица 1) векторы, которые будут иметь большее влияние как на крутящий момент, так и на магнитный поток: V 2 , V 3 , V 5 и V 6 .Применение V 2 увеличит и крутящий момент, и магнитный поток, тогда как V 5 уменьшит оба. Вместо этого, если применить V 3 , это увеличит крутящий момент, но уменьшит магнитный поток. Аналогично, если применяется V 6 , это увеличит магнитный поток и уменьшит крутящий момент. Применение V 1 или V 4 окажет влияние в основном на вектор потока, уменьшая или увеличивая его, соответственно. Наконец, если применяется любой нулевой вектор, он будет медленно уменьшать оба вектора.Следовательно, для этого примера, если сектор = 1, = 1 и = 1, из таблицы 1 можно увидеть, что применяемый вектор будет V 2 .
Применение V 1 или V 4 окажет влияние в основном на вектор потока, уменьшая или увеличивая его, соответственно. Наконец, если применяется любой нулевой вектор, он будет медленно уменьшать оба вектора.Следовательно, для этого примера, если сектор = 1, = 1 и = 1, из таблицы 1 можно увидеть, что применяемый вектор будет V 2 .
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
После выбора оптимального вектора он применяется непосредственно к VSI для коррекции крутящего момента и потока.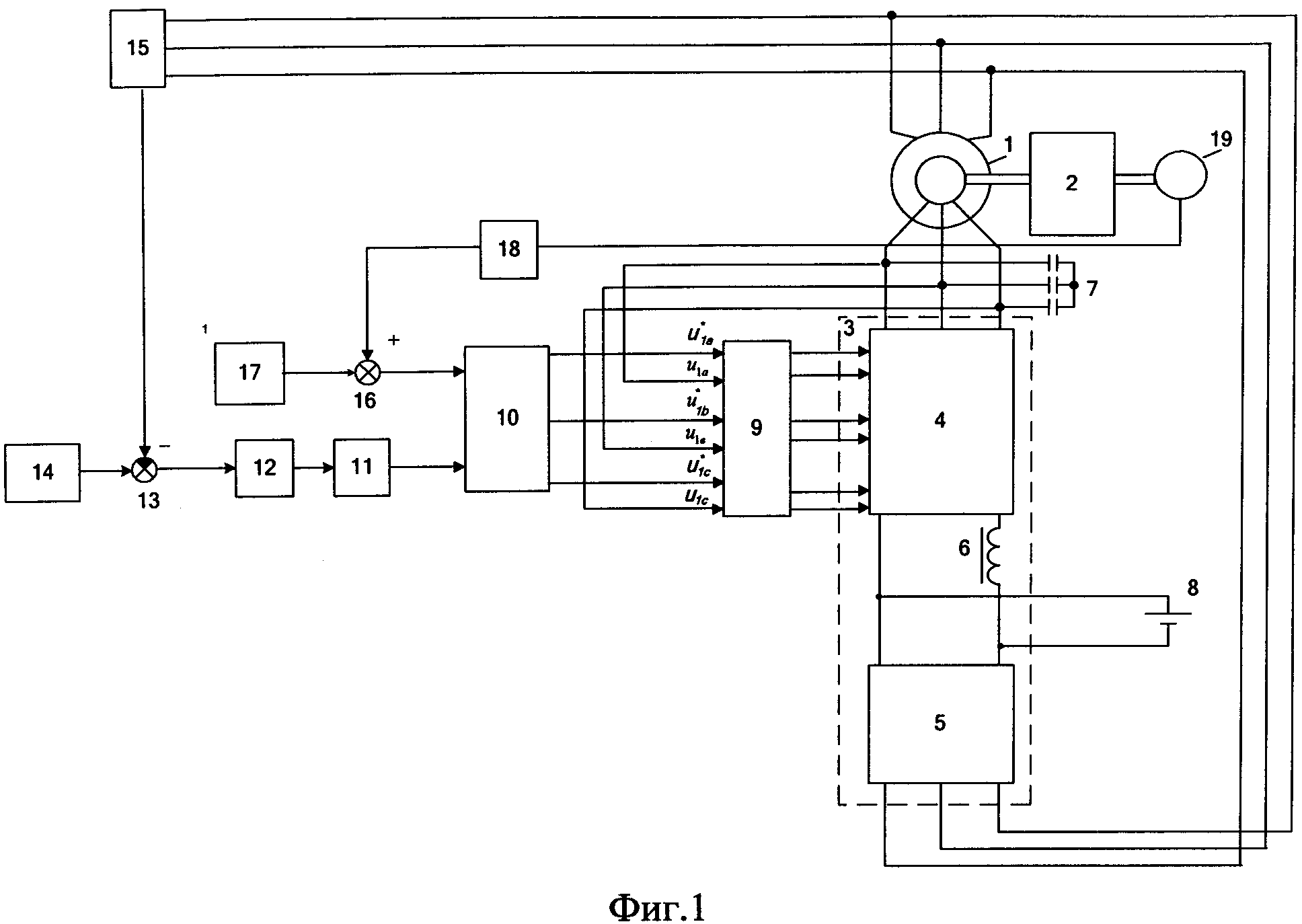
4. Описание сервопривода DTC
Сервопривод DTC был разработан как настраиваемый модульный испытательный стенд для промышленного сервопривода. Основная идея состоит в том, что каждый из модулей может быть заменен другим с другим типом оборудования. Например, модуль датчика тока в этой конструкции использует индуктивные датчики, но может быть легко заменен модулем датчика Холла или модулем шунтирующего резистора. Кроме того, модуль обработки, который в настоящее время использует 32-разрядный микроконтроллер, может быть заменен в будущем на другой тип встроенной системы.Даже алгоритм DTC имеет архитектуру с открытым исходным кодом, так что основные блоки могут быть изменены или улучшены, или даже могут быть легко добавлены новые функции. Основная причина заключается в возможности экспериментально проверить и визуализировать влияние этих изменений на двигательную активность. Система сервопривода показана на рисунке 4.
Список электронных компонентов, используемых в этом прототипе, представлен в таблице 2.
| |||||||||||||||||||||||||
4.
 1. Схема измерения тока-напряжения и формирования сигнала
1. Схема измерения тока-напряжения и формирования сигнала
Один из наиболее важных этапов процесса проверки кода неисправности начинается с измерения тока. Поскольку оценки магнитного потока и крутящего момента основаны на текущих значениях, необходимо иметь точный датчик тока. Во-первых, сигналы тока двух линий двигателя измеряются и преобразуются в сигнал постоянного тока путем добавления напряжения смещения. Во-вторых, сигнал усиливается и фильтруется, поэтому его можно преобразовать в цифровой сигнал с помощью аналого-цифровых преобразователей (АЦП).Фильтры антиалиасинга используются для эффективного отсечения частот, превышающих примерно половину максимальной интересующей частоты.
Для этого проекта использовался индуктивный датчик тока MURATA 56300C. Как показано на рисунке 5, ток измеряется, положительное смещение и усиливается с помощью операционных усилителей.
Для расчета двухфазных эталонных компонентов для напряжения необходимо контролировать шину питания постоянного тока в случае падения напряжения. Для измерения постоянного напряжения (рис. 6) использовалась схема резистивного делителя, которая также усиливалась с помощью операционных усилителей с полевым транзистором.Поскольку это напряжение всегда положительно, смещения не требуется. Сигнал масштабируется, усиливается и фильтруется, чтобы его можно было преобразовать в цифровой сигнал.
Для измерения постоянного напряжения (рис. 6) использовалась схема резистивного делителя, которая также усиливалась с помощью операционных усилителей с полевым транзистором.Поскольку это напряжение всегда положительно, смещения не требуется. Сигнал масштабируется, усиливается и фильтруется, чтобы его можно было преобразовать в цифровой сигнал.
4.2. Схема силовой электроники
На этом этапе трехфазное напряжение преобразуется в сигнал постоянного тока, чтобы его можно было снова преобразовать обратно в управляемый сигнал переменного тока для двигателя. На этом этапе для выпрямительного моста и VSI использовались силовые модули промышленного класса (рисунок 7). Два электролитических конденсатора 1000 μ F подключены параллельно для ступени фильтрации постоянного тока.
4.3. Модуль обработки DTC
Процессор, используемый для реализации метода DTC, представляет собой 32-битный микроконтроллер ESPRESSIF ESP32-WROVER-B, который работает на частоте 240 МГц. ESP32 — отличная плата для разработки приложений IoT, поскольку это недорогое устройство с множеством мощных функций (Таблица 3). ESP32 можно программировать в различных средах и языках программирования, таких как Arduino IDE, Espressif-IDF, Lua, Micropython и C / C ++.
ESP32 — отличная плата для разработки приложений IoT, поскольку это недорогое устройство с множеством мощных функций (Таблица 3). ESP32 можно программировать в различных средах и языках программирования, таких как Arduino IDE, Espressif-IDF, Lua, Micropython и C / C ++.
| ||||||||||||||||
В этом проекте Micropython использовался для разработки и реализации технологии DTC. Micropython — это повторная реализация языка программирования Python 3, предназначенная для микроконтроллеров и встроенных систем. Оба языка программирования очень похожи. За исключением нескольких исключений, все языковые функции Python доступны в Micropython.
Micropython — это повторная реализация языка программирования Python 3, предназначенная для микроконтроллеров и встроенных систем. Оба языка программирования очень похожи. За исключением нескольких исключений, все языковые функции Python доступны в Micropython.
Основная причина использования Micropython в прототипе DTC заключается в том, что на сегодняшний день Python является одним из наиболее широко используемых, простых и легких в изучении языков программирования, доступных в настоящее время, и хорошо подходит для вычислительного анализа и проектирования [26, 27].С появлением Micropython программировать микроконтроллеры и встроенные устройства стало проще. Это делает ESP32 и Micropython отличной экспериментальной платформой для студентов, преподавателей и исследователей [28].
Схема DTC, представленная ранее на рисунке 1, была реализована в Micropython и ESP32 с использованием периферийных устройств, таких как АЦП, ЦАП (цифро-аналоговые преобразователи) и таймеры. Обобщенный рабочий процесс алгоритма DTC показан на рисунке 8.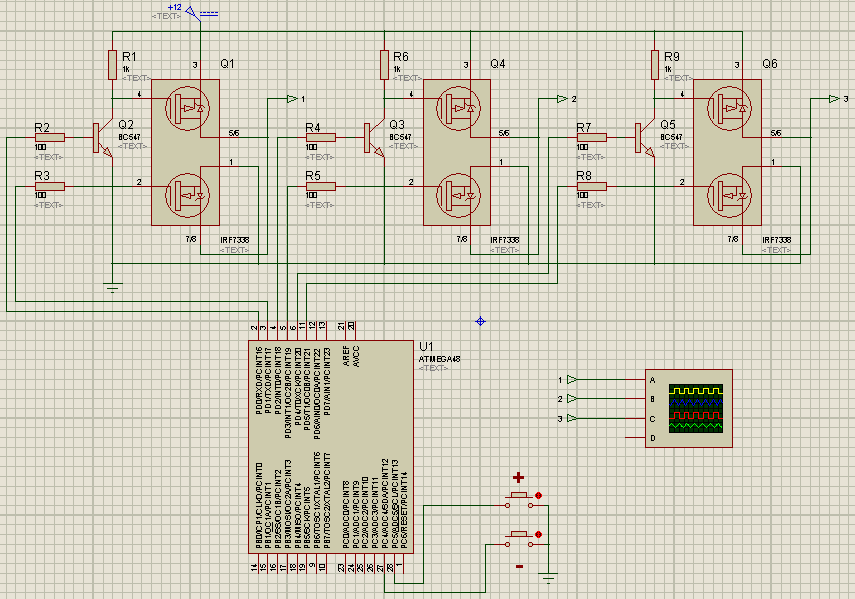
Алгоритм DTC запрограммирован в программе обслуживания прерываний Micropython (рисунок 9), которая запускается таймером каждые 250 μ S.После запуска аналоговые сигналы тока и напряжения преобразуются в цифровые значения. Эти значения используются для оценки компонентов магнитного потока, магнитного потока и значений крутящего момента, а затем сравниваются с эталонными значениями для выбора оптимального вектора для VSI. Любой из этих сигналов можно визуализировать на внешнем осциллографе с использованием внутренних ЦАП.
5. Экспериментальные результаты
Экспериментальные испытания проводились с использованием стандартного сервопривода PMSM мощностью 1 кВт, основные параметры которого представлены следующим образом: R s = 15.57 Ом; пары полюсов,; номинальное напряжение, В = 130 В; номинальный ток, I = 2,5 А; номинальный крутящий момент T = 2,7 Нм и номинальная скорость = 5000 об / мин.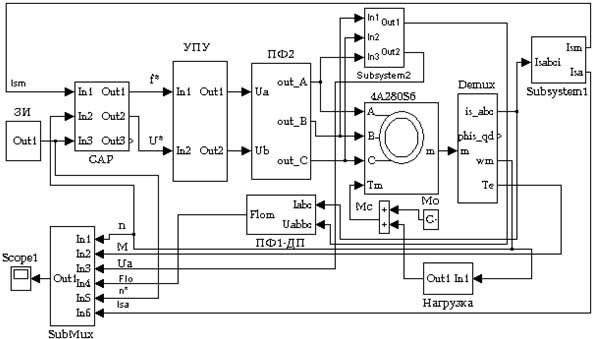
Для проверки работы сервопривода DTC было выполнено несколько тестов, в которых основное внимание уделялось сигналам магнитного потока, крутящего момента и тока. Если выходные сигналы аналогичны смоделированным сигналам, это означает, что алгоритм реализован правильно. Кроме того, был измерен выходной крутящий момент, чтобы убедиться, что он как можно ближе к эталонному значению крутящего момента.
Хотя важно уточнить, что производительность алгоритма DTC и качество выходных сигналов напрямую связаны с контроллерами гистерезиса [29, 30]. По этой причине большинство тестов проводилось путем наблюдения за влиянием полос гистерезиса на выходные сигналы.
5.1. Влияние диапазона потока гистерезиса
Диапазон потока гистерезиса оказывает значительное влияние на выходные сигналы. Например, если полоса узкая, частота переключения будет выше, геометрическое место потока будет стремиться к круговой траектории, а текущий сигнал очень близок к синусоиде; однако пульсация тока будет увеличиваться, поскольку узкая полоса облегчит превышение пределов гистерезиса.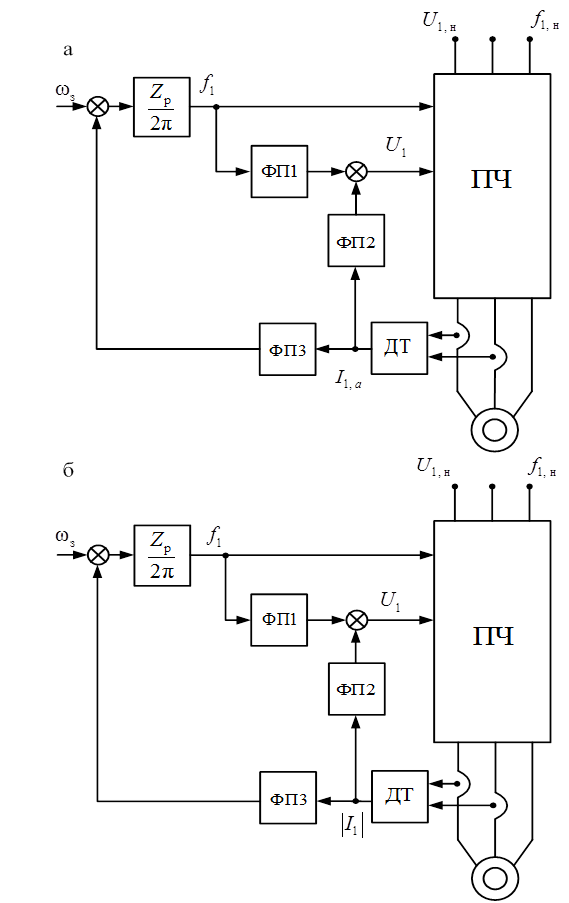 Напротив, широкая полоса снизит содержание пульсаций, но частота переключения будет уменьшаться, локус потока будет стремиться к гексагональному пути, и текущий сигнал будет искажен [30]. Этот эффект можно наблюдать при моделировании (рисунок 10) и экспериментальных испытаниях (рисунок 11).
Напротив, широкая полоса снизит содержание пульсаций, но частота переключения будет уменьшаться, локус потока будет стремиться к гексагональному пути, и текущий сигнал будет искажен [30]. Этот эффект можно наблюдать при моделировании (рисунок 10) и экспериментальных испытаниях (рисунок 11).
Влияние полосы гистерезиса потока также можно наблюдать в токовых сигналах. Когда полоса узкая, текущий сигнал будет иметь большее содержание пульсаций, но форма будет близка к синусоиде.Если вместо этого полоса шире, пульсация будет меньше, но сигнал будет сильно искажен. Это поведение можно увидеть в моделировании (Рисунок 12) и экспериментальном сигнале тока двигателя (Рисунок 13).
5.2. Влияние диапазона гистерезисного крутящего момента
Ширина диапазона гистерезисного крутящего момента также оказывает значительное влияние на характеристики DTC, главным образом на частоту переключения инвертора. Хотя он также влияет на общее гармоническое искажение (THD) в токовых сигналах, этот эффект связан с обеими полосами гистерезиса.
Во-первых, частота коммутации определяется как где N s — это количество коммутаций за период, а T f — период основного сигнала.
Чтобы наблюдать влияние на частоту переключения, обе полосы гистерезиса были изменены. На рисунке 14 можно увидеть, что хотя обе полосы гистерезиса влияют на частоту переключения, диапазон крутящего момента имеет большее влияние.
Что касается THD для токового сигнала, он определяется как где I — среднеквадратичное значение тока, а I 1 — среднеквадратичное значение основной гармонической составляющей.
Обе полосы гистерезиса менялись, но в этом случае полоса потока имела большее влияние на искажение текущего сигнала, как показано на рисунке 15.
5.3. Измерения выходного крутящего момента
Чтобы проверить характеристики крутящего момента сервоконтроллера, измерения были выполнены с использованием датчика крутящего момента 10 Нм. В этих испытаниях, было важно проверить, что выходной крутящий момент соответствует эталонному крутящего момента и что пульсации содержания является относительно низким.
В этих испытаниях, было важно проверить, что выходной крутящий момент соответствует эталонному крутящего момента и что пульсации содержания является относительно низким.
И снова полосы гистерезиса были изменены, чтобы наблюдать влияние на сигнал крутящего момента.Поскольку была реализована исходная схема DTC без каких-либо улучшений, ожидалось, что она будет иметь относительно высокое содержание пульсаций. Наилучшие характеристики крутящего момента с наименьшей пульсацией были получены, когда диапазон магнитного потока был установлен на 2% от эталонного значения (0,8 Втб), а диапазон крутящего момента был установлен на 1% от эталонного значения. Сигнал выходного крутящего момента показан на рисунке 16.
Излишне говорить, что проверка отклика крутящего момента в сервоприводе очень важна, поскольку это гарантирует, что изменения крутящего момента и направления будут выполняться приводом.Однако использование физического датчика крутящего момента обычно дорого и требует дополнительной установки и программного обеспечения. Кроме того, датчики крутящего момента имеют определенный диапазон; если требуется более широкий диапазон, стоимость становится непомерно высокой. В будущих проектах было бы интересно использовать виртуальные инструменты [31] для мониторинга сигналов крутящего момента и магнитного потока и, таким образом, избежать ограничений физических датчиков, особенно в электромеханических проектах, направленных на образование [32], где финансирование обычно ограничен.
Кроме того, датчики крутящего момента имеют определенный диапазон; если требуется более широкий диапазон, стоимость становится непомерно высокой. В будущих проектах было бы интересно использовать виртуальные инструменты [31] для мониторинга сигналов крутящего момента и магнитного потока и, таким образом, избежать ограничений физических датчиков, особенно в электромеханических проектах, направленных на образование [32], где финансирование обычно ограничен.
6. Заключение
Было представлено предложение привода PMSM, основанного на методике DTC. Этот алгоритм управления двигателем был написан на Micropython для реализации на микроконтроллере ESP32. Целью этого прототипа является использование в дидактических приложениях для студентов-инженеров. Результаты экспериментов и моделирования подтверждают эффективность конструкции и показывают, что хорошие характеристики крутящего момента могут быть достигнуты с помощью DTC на недорогом универсальном процессоре.Основным преимуществом этого прототипа является его простота, поскольку он не требовал никаких изменений в исходной структуре DTC, и даже в этом случае содержание пульсаций тока и крутящего момента было приемлемым.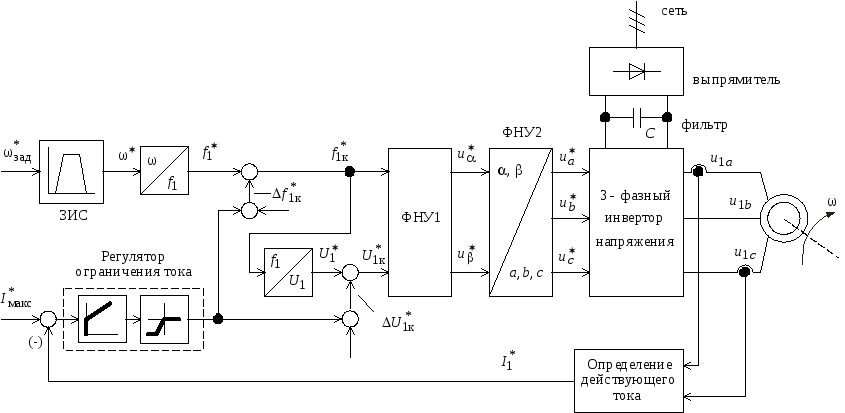 Код, написанный на Micropython, упростил понимание и настройку различных параметров тестирования, таких как изменение полос гистерезиса для наблюдения за качеством выходных сигналов тока, магнитного потока и крутящего момента.
Код, написанный на Micropython, упростил понимание и настройку различных параметров тестирования, таких как изменение полос гистерезиса для наблюдения за качеством выходных сигналов тока, магнитного потока и крутящего момента.
Это позволит студентам и исследователям, интересующимся управлением движением, поэкспериментировать с простым и практичным инструментом, а в будущих проектах улучшить даже производительность и структуру этого прототипа.
Доступность данных
Никакие данные не использовались для поддержки этого исследования.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации данной статьи.
Решения для управления двигателями | Renesas
Renesas предоставляет решения по управлению двигателями для поддержки всего процесса разработки. Ассортимент продукции включает устройства, которые особенно подходят для управления двигателем, комплект для управления двигателем, который можно использовать в качестве эталонного проекта, а также полное программное обеспечение и инструменты.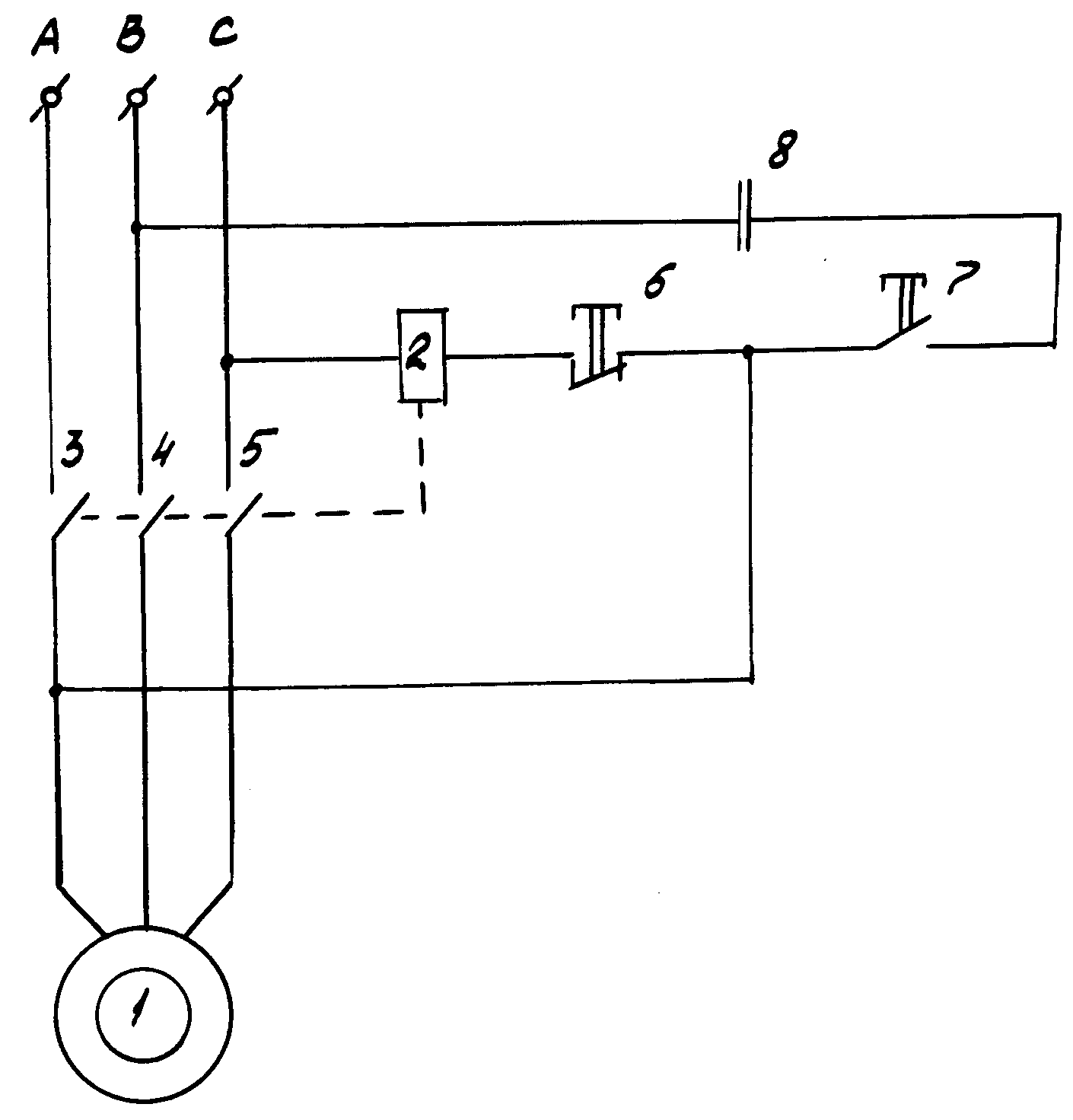
Страница сведений о каждом решении выглядит следующим образом.
На этой странице можно найти другую информацию о решениях для бесщеточных двигателей постоянного тока (синхронных двигателей с постоянными магнитами). Страница сведений о каждом решении выглядит следующим образом.
Система оценки управления двигателем
Высокопроизводительные микроконтроллеры Renesas, аналоговые и силовые (A&P) устройства идеально подходят для управления двигателями. Эталонные платы, смонтированные со схемой инвертора, необходимой для привода двигателя, а также различные образцы кода и примечания по применению готовы к использованию.Полные инструменты для оценки и разработки средств управления двигателем помогают сократить время вывода на рынок, и они идеально подходят для следующих целей:
- Оценка устройств Renesas (MCU, продукты A&P)
- Справочник по проектированию плат и программного обеспечения
- Изучение управления двигателем
Система оценки управления двигателем
для семейства RA — RA6T1 Group — это низковольтный синхронный двигатель с постоянными магнитами (бесщеточный двигатель постоянного тока), который позволяет любому легко оценить управление двигателем. С помощью этого продукта и программного обеспечения, которые можно загрузить из Интернета, вы можете сразу приступить к оценке управления двигателем.
С помощью этого продукта и программного обеспечения, которые можно загрузить из Интернета, вы можете сразу приступить к оценке управления двигателем.
Оценочный комплект для синхронных двигателей с постоянными магнитами (бесщеточные двигатели постоянного тока)
Система оценки для двигателей BLDC — это набор решений для простой оценки синхронных двигателей с постоянными магнитами. При использовании в сочетании с картой ЦП различные микроконтроллеры Renesas могут управлять двигателем. Используя образец программного обеспечения Renesas Motor Workbench и инструмент поддержки разработки, можно легко выполнить оценку и анализ, так что вы можете начать оценку сразу после покупки набора.
Оценочный комплект привода шагового двигателя
с использованием преобразователя частоты Renesas в цифровой преобразователь IC
Система оценки шагового двигателя с резольвером состоит из микроконтроллера управления двигателем, схемы инвертора, шагового двигателя с датчиком резольвера и резольвера в цифровой преобразователь IC.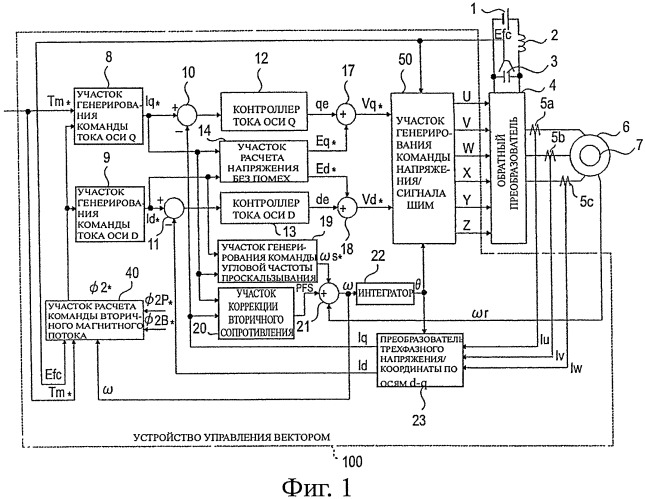 Кроме того, он поддерживает инструмент поддержки управления двигателями Renesas Motor Workbench, который упрощает отладку программного обеспечения и понимание управления двигателями.
Кроме того, он поддерживает инструмент поддержки управления двигателями Renesas Motor Workbench, который упрощает отладку программного обеспечения и понимание управления двигателями.
Примечание. Оценочную систему управления двигателем 24 В для дополнительной платы ЦП RX23T нельзя использовать для управления датчиком резольвера из этого комплекта.
Подробная информация о решении резольвера
ИС цифрового преобразователя резольвера
Простое управление двигателем BLDC с использованием микросхемы управления двигателем RAJ 306000
Привод двигателя
с использованием микроконтроллера RX / RL
Renesas «Система оценки управления двигателем 24 В для RX23T» позволяет легко оценивать решения для низковольтных синхронных двигателей с постоянными магнитами с помощью платы, входящей в комплект, и программного обеспечения, загруженного с веб-сайта.
Карты ЦП
(приобретаются отдельно) позволяют проводить оценки с использованием другого микроконтроллера.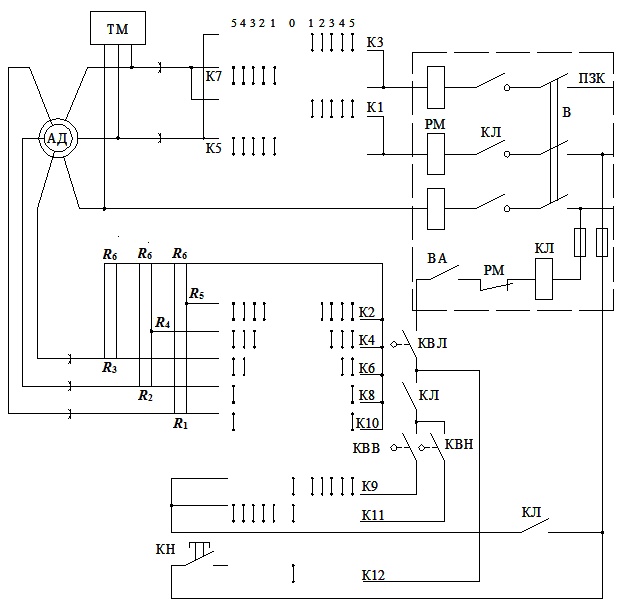
Запрос на закупку
Renesas Motor Workbench 2.0: Средство разработки управления двигателем 2.0
Renesas Motor Workbench — это инструмент для отладки управления двигателем. Функция анализатора может считывать и записывать переменные внутри микроконтроллера управления двигателем и отображать форму колебаний переменных, а функция тюнера может автоматически настраивать параметр векторного управления с помощью набора решений. При выполнении автоматической регулировки параметры двигателя и параметры управления могут быть получены автоматически.
Инструмент поддержки разработки управления двигателем Renesas Motor Workbench 2.0 (ZIP | английский, 日本語)
Уведомление об истечении срока аутентификации
Для текущих пользователей Renesas Motor Workbench
При запуске этого инструмента могут отображаться следующие сообщения о дате истечения срока аутентификации.
Срок действия лицензии скоро истекает: Отображается, когда до истечения срока остается менее 30 дней.
Срок годности истек: Отображается, когда истекает срок годности.
Чтобы продолжить использование инструмента после истечения срока действия сертификата, вам необходимо импортировать последний файл аутентификации и обновить аутентификацию.
- Загрузите последний файл аутентификации после ответа на простой вопросник.
Скачать файл аутентификации - Импортируйте файл аутентификации, нажав кнопку «Выбрать» на экране сообщения об истечении срока действия сертификата.
Платы ЦП
Эти дополнительные карты ЦП для системы оценки управления двигателем 24 В для RX23T позволяют оценить управление двигателем с помощью другого микроконтроллера, купив дополнительную карту ЦП и заменив ее местами.
Платы ЦП Desk Top Laboratories Inc.
- Плата ЦП RL78 / G1F (64-контактная, 64 КБ) — T5103
- Плата ЦП RL78 / G1G (32-контактная, 16 КБ) — T5104
- Плата ЦП RL78 / G14 (64-контактная, 64 КБ) — T5101
- Плата ЦП RL78 / G14 (32-контактная, 64 КБ) — T5105
- Плата ЦП RL78 / G1M (20 контактов, 8 КБ) — T5108
Приобрести карты ЦП настольных лабораторий
Простая разработка для промышленных сервоприводов
Набор решений для управления движением RZ / T1 представляет собой полное аппаратное / программное решение, помогающее упростить разработку встроенных систем для промышленных сервоприводов и контроллеров, промышленных роботизированных систем, заводского оборудования и других станков, требующих высокой скорости, скорости реагирования и отличного режима реального времени спектакль.
Приобретите комплект решений для управления движением RZ / T1
Примечания по применению и образец кода
Пример кода и примечания по применению для каждого типа управления двигателем перечислены ниже. Требуется My Renesas ID.
Оценочная система для двигателя BLDC
Синхронный двигатель с постоянным магнитом (бесщеточный двигатель постоянного тока)
Система оценки шагового двигателя с датчиком резольвера
Система оценки управления двигателем 30 В для RAJ306000
Синхронный двигатель с постоянным магнитом (бесщеточный двигатель постоянного тока)
Система оценки управления двигателем 24 В для RX23T
Синхронный двигатель с постоянными магнитами (бесщеточный двигатель постоянного тока)
| Метод управления | Скачать Замечания по применению Об алгоритме | Скачать Примечания по применению и образец кода О реализации | Интегрированная Разработка Окружающая среда |
|---|---|---|---|
| Контроль проводимости 120 градусов по Холлу | Управление синхронным двигателем с постоянными магнитами на 120 градусов (алгоритм) (PDF | English, 日本語) | RX23T 120-градусное управление синхронным двигателем с постоянными магнитами с использованием датчиков Холла (реализация) (PDF | English, 日本語) (RX23T) RX24T 120-градусное управление синхронным двигателем с постоянными магнитами с использованием датчиков Холла (реализация) (PDF | Английский, 日本語) (RX24T) RL78 / G1F Управление проводимостью 120 градусов синхронного двигателя с постоянными магнитами (реализация) (PDF | English, 日本語) (RL78 / G1F) Управление скоростью 120-градусного проводящего управляемого постоянного магнитного синхронного двигателя двигатель с использованием датчиков Холла (реализация) (PDF | English,) (RL78 / G1G * 1) Регулировка скорости 120-градусного управляемого синхронного двигателя с постоянными магнитами и проводимостью с использованием датчиков Холла (реализация) (PDF | English, 日本語) ( RL78 / G14) RL78 / G1M Управление синхронным двигателем с постоянными магнитами на 120 градусов (реализация) (PDF | английский, 日本語) (RL78 / G1M * 1) | CS + e 2 студия |
| Бездатчиковое управление проводимостью под углом 120 градусов | RX23T Бессенсорное управление синхронным двигателем с постоянными магнитами на 120 градусов (реализация) (PDF | Английский, 日本語) (RX23T) RX24T Бессенсорное управление током 120 градусов синхронного двигателя с постоянными магнитами (реализация) (PDF | English, 日本語) ) (RX24T) RL78 / G1F 120-градусное проводящее управление синхронным двигателем с постоянными магнитами (реализация) (PDF | Английский, 日本語) (RL78 / G1F) двигатель (реализация) (PDF | английский, 日本語) (RL78 / G1G * 1) Бессенсорное регулирование скорости 120-градусного управляемого синхронного двигателя с постоянными магнитами (реализация) (PDF | английский,) (RL78 / G14) RL78 / G1M Управление синхронным двигателем с постоянным магнитом на 120 градусов (реализация) (PDF | Английский, 日本語) (RL78 / G1M * 1) | CS + e 2 студия | |
| Бездатчиковое управление током на 120 градусов (с функцией определения исходного положения) | RL78 / G1F Бездатчиковое регулирование скорости синхронного двигателя с постоянными магнитами и проводимостью на 120 градусов с определением начального положения (реализация) (PDF | English, 日本語) (RL78 / G1F * 3) | CS + e 2 студия | |
| Бездатчиковое векторное управление | Бездатчиковое векторное управление для синхронного двигателя с постоянными магнитами (алгоритм) (PDF | English, 日本語) | RX13T Векторное управление без датчика для синхронного двигателя с постоянными магнитами (реализация) (PDF | Английский, English) (RX13T) RX23T Векторное управление без датчиков для синхронного двигателя с постоянными магнитами (реализация) (PDF | английский, 日本語) (RX23T) RX24T / RX24U Бессенсорное векторное управление для синхронного двигателя с постоянными магнитами (реализация) (PDF | Английский, 日本語) (RX24T, RX24U) RX66T Векторное управление без датчиков для синхронного двигателя с постоянными магнитами (реализация) (PDF | Английский, 日本語) (RX66T ( MTU / GPT) * 4) RX72T Векторное управление без датчика для синхронного двигателя с постоянными магнитами (реализация) (PDF | Английский, 日本語) (RX72T (MTU / GPT) * 4) RL78 / G1F (1 шунт) * 2 * 3 RL78 / G1F (3 шунта) * 2 | CS + e 2 студия |
| Векторное управление кодировщиком | Векторное управление синхронным двигателем с постоянными магнитами с энкодером (алгоритм) (PDF | English, 日本語) | RX72T Векторное управление синхронным двигателем с постоянными магнитами и энкодером (реализация) (PDF | English, 日本語) (RX72T (MTU / GPT) * 4) RX66T Векторное управление синхронным двигателем с постоянными магнитами и энкодером (реализация) (PDF | English , 日本語) (RX66T (MTU / GPT) * 4) RX23T Векторное управление синхронным двигателем с постоянными магнитами и энкодером (реализация) (PDF | Английский, 日本語) (RX23T) RX24T / RX24U Векторное управление синхронным двигателем с постоянными магнитами с кодировщиком (реализация) (PDF | английский, 日本語) (RX24T, RX24U) | CS + e 2 студия |
* 1: Использует партнерскую доску.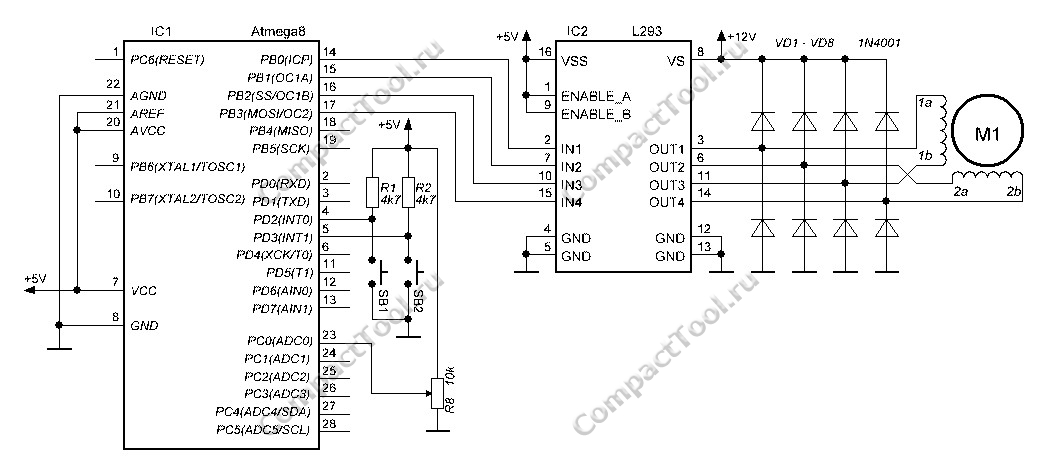
* 2: За информацией обращайтесь к торговому представителю Renesas или к дистрибьютору.
* 3: Для работы программы, указанной в данном примечании по применению, необходимо изменить схему системы оценки управления двигателем 24 В в стартовом комплекте Renesas Solution для RX23T. Если вы измените схему, другие программы для системы оценки управления двигателем 24 В Renesas Solution Starter Kit для RX23T не смогут работать. Что касается модификации схемы, мы не гарантируем работу этой программы после внесения изменений.
* 4: Два типа настроек таймера (MTU и GPT) реализованы как таймер вывода PWM, и его можно выбрать во время компиляции.
Комбинация партнерской платы инвертора (пробная серия T1102) и партнерской платы ЦП (T5101 RL78 / G14 64-контактный)
(трехфазный асинхронный двигатель)
- Матовый двигатель постоянного тока
- Синхронный двигатель с постоянными магнитами (бесщеточный двигатель постоянного тока)
- Трехфазный асинхронный двигатель
- Однофазный асинхронный двигатель
- Шаговый двигатель
Узнайте больше о различных двигателях на странице «Типы двигателей».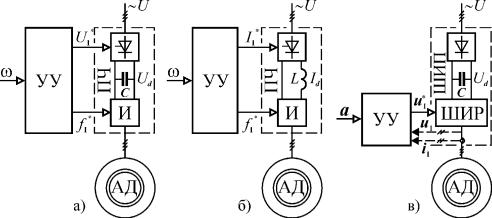
Рекомендуемые продукты для управления двигателем
Партнеры
BFG Engineering — это компания, занимающаяся разработкой аппаратного и программного обеспечения. Мы работаем в основном в области расширенного управления электроприводами, автоматизации малых машин и управления производственными процессами.
BFG Engineering
Via Divisione Folgore, 43
36100 Виченца
Италия
ТЕЛ: (+39) 0444923822
электронная почта: [email protected]
Щелкните здесь, чтобы узнать подробнее
.