ProElectrika.com — Электрика своими руками. Монтаж асинхронного двухсекционного двигателя
Сдвоенный асинхронный электродвигатель
Изобретение относится к области электротехники, в частности к электроприводам переменного тока, и может быть использовано в качестве электромеханического преобразователя для механизмов, имеющих упругую связь с неподвижной опорой. Технический результат, достигаемый при использовании настоящего изобретения, состоит в предотвращении возникновения колебательных нагрузок, а также в снижении электромагнитных и механических потерь при пуске и в режиме преодоления нагрузки. Указанный технический результат достигается тем, что в сдвоенном асинхронном электродвигателе, включающем два ротора с короткозамкнутыми обмотками, неподвижный статор и подвижный статор, согласно изобретению роторы расположены на разных валах, подвижный статор жестко соединен с ротором, относящимся к неподвижному статору, а каждый из статоров подключен к сети через индивидуальный преобразователь частоты, включающий измерительную систему и регулятор скорости. 1 ил.
Изобретение относится к области электротехники, в частности к электроприводам переменного тока, и может быть использовано в качестве электромеханического преобразователя для механизмов, имеющих упругую связь с неподвижной опорой.
Известен двигатель с двойным статором Бушеро (Шенфер К.И. Асинхронные машины. - М.-Л.: Редакция энергетической литературы. 1938. - 412 с. - С.185-187), имеющий два ротора с короткозамкнутыми обмотками и два статора, причем один из статоров может поворачиваться относительно второго.
Недостатками известного технического решения является то, что управление поворотом подвижного статора производится вручную; двигатель подключается к сети непосредственно, что исключает возможность регулировать параметры подводимого к статору напряжения; пуск сопровождается высокими электрическими потерями, вызванными рассеиванием мощности на короткозамыкающем кольце, расположенном между двумя роторами; конструкция предусматривает регулирование величины электромагнитного момента только при пуске двигателя; роторы расположены на одном валу, в связи с чем, его невозможно применить для подавления вибраций корпуса, вызванных переменными нагрузками при установке двигателя на упругой опоре.
Наиболее близким устройством к предлагаемому является асинхронная машина (Асинхронная машина: пат. Рос. Федерации 2161361, МПК7 Н02К 17/42, Н02К 17/30, Н02К 3/20 / М.М.Таегян, П.В.Юргалов, А.В.Романов), включающая два статора и ротор с общей короткозамкнутой обмоткой, причем один из статоров может поворачиваться относительно второго с помощью устройства непрерывного автоматического регулирования углом поворота.
Недостатками известного технического решения, принятого за прототип, является то, что двигатель подключается к сети непосредственно, что исключает возможность регулировать параметры подводимого к статору напряжения, а его ротор расположен на одном валу, в связи с чем данную конструкцию невозможно применить для подавления вибраций корпуса, вызванных переменными нагрузками при установке двигателя на упругой опоре.
Задачей изобретения является снижение вибраций корпуса, вызванных переменными нагрузками при установке двигателя на упругой опоре и повышение его КПД.
Технический результат заявляемого изобретения выражается в предотвращении возникновения колебательных нагрузок при установке двигателя на упругой раме и снижении электромагнитных и механических потерь при пуске и в режиме преодоления нагрузки.
Указанный технический результат достигается тем, что в сдвоенном асинхронном электродвигателе, включающем два ротора с короткозамкнутыми обмотками, неподвижный статор и подвижный статор, согласно изобретению роторы расположены на разных валах, подвижный статор жестко соединен с ротором, относящимся к неподвижному статору, а каждый из статоров подключен к сети через индивидуальный преобразователь частоты, включающий измерительную систему и регулятор скорости.
Таким образом, подключение каждого из статоров двигателя через индивидуальный преобразователь частоты позволит производить одновременно и непрерывно автоматическое регулирование как электромагнитного момента на валу двигателя, относящемуся к неподвижному статору, так и на валу, относящемуся к подвижному статору, причем независимо друг от друга, и также непрерывное регулирование параметров подводимого к статору напряжения, за счет чего реализуется снижение электромагнитных потерь в двигателе как при пуске, так и в режиме преодоления нагрузки. Регулирование электромагнитного момента на валу двигателя, относящемуся к подвижному статору, позволит производить пуск и преодоление двигателем нагрузки на его оконечном валу с минимальными механическими потерями, а регулирование электромагнитного момента на валу двигателя, относящемуся к неподвижному статору, реализует электромагнитную связь подвижного статора с упругой опорой, за счет чего производится активное подавление вибраций корпуса, вызванных переменными нагрузками при установке двигателя на упругой опоре.
Изобретение поясняется рисунком, где схематично показана взаимосвязь составных элементов сдвоенного асинхронного электродвигателя.
Заявляемое устройство состоит из неподвижного статора 1 и подвижного статора 2, жестко соединенного с ротором 3, относящимся к неподвижному статору 1, а ротор 4, относящийся к подвижному статору 2, расположен на оконечном валу двигателя 5. Неподвижный статор 1 имеет устройства крепления, при помощи которых двигатель устанавливается на упругую опору 6, механически связанную с неподвижной опорой 7. Обмотка неподвижного статора 1 подключена к электрической сети через преобразователь частоты 8, а обмотка подвижного статора 2 подключена к сети через преобразователь частоты 9.
Сдвоенный асинхронный двигатель работает следующим образом. К обмоткам неподвижного статора 1 подводится напряжение, создаваемое преобразователем частоты 8, а к обмоткам подвижного статора 2 подводится напряжение, создаваемое преобразователем частоты 9. Каждый из преобразователей частоты 8 и 9 с использованием входящей в свой состав измерительной системы формирует электромагнитный момент на валу двигателя, причем электромагнитный момент M1, формируемый при помощи преобразователя частоты 8, действует на ротор 3, относящийся к неподвижному статору 1, и на подвижный статор 2, поскольку между подвижным статором 2 и ротором 3 существует жесткая связь, а электромагнитный момент М2, формируемый при помощи преобразователя частоты 9, действует на ротор 4, относящийся к подвижному статору 2, и на оконечный вал двигателя 5. Величина создаваемых электромагнитных моментов M1 и М2 задается автоматически конструктивно входящими в состав преобразователей частоты 8 и 9 регуляторами скорости таким образом, чтобы вследствие разницы создаваемых электромагнитных моментов и момента сопротивления на оконечном валу двигателя 5 возникал динамический момент, вызывающий совместное угловое перемещение подвижного статора 2 и ротора 3, относящегося к неподвижному статору 1, а также угловое перемещение ротора 4 относительно подвижного статора 2. Регуляторы, входящие в состав преобразователей частоты 8 и 9, действуют таким образом, чтобы разгон роторов 3 и 4 до требуемой угловой скорости производился за одинаковый промежуток времени. По окончании процесса пуска электромагнитный момент M1, формируемый при помощи преобразователя частоты 8, полностью уравновесит эквивалентный момент М0, возникающий в упругой опоре 6 вследствие свободы движения относительно неподвижной опоры 7, а электромагнитный момент М2, формируемый при помощи преобразователя частоты 8, уравновесит нагрузку, прикладываемую к оконечном валу 5.
Поскольку между неподвижной опорой 7 и подвижным статором 2, к которому относится ротор 4 и оконечный вал двигателя 5, отсутствует непосредственная механическая связь, переходные процессы по моменту, возникающие вследствие изменения основной нагрузки двигателя, будут отражаться на изменении угловой скорости подвижного статора 2, но в условиях автоматического регулирования электромагнитного момента M1, действующего на ротор 3, а следовательно, на неподвижный статор 1, не будут отражаться на эквивалентном моменте М0 упругой опоры 6, таким образом предотвращая возникновение вибраций корпуса, вызванных переменными нагрузками при установке двигателя на упругой опоре.
Поскольку задание требуемой угловой скорости сдвоенного асинхронного электродвигателя реализуется регуляторами скорости, заложенными в преобразователи частоты 8 и 9, тахограмма движения оконечного вала 5 может быть задана таким образом, чтобы минимизировать механические потери при пуске. Автоматическое регулирование электромагнитного момента М2 на оконечном валу 5 позволит снизить механические потери в режиме преодоления нагрузки.
Автоматическое регулирование электромагнитных моментов M1 и М2 обеспечит плавный разгон двигателя при пуске без завышенного потребления токов неподвижным и подвижным статорами 1 и 2 из сети, таким образом обеспечивая снижение электромагнитных потерь в двигателе при пуске. Поскольку электромагнитные моменты M1 и М2 автоматически формируются преобразователями частоты 8 и 9 и могут быть сопоставлены с номинальными значениями величины электромагнитного момента для сдвоенного асинхронного электродвигателя, при снижении нагрузки на оконечном валу 5 без ущерба для перегрузочной способности двигателя может быть снижено значение как активного, так и реактивного тока, потребляемого неподвижным и подвижным статорами 1 и 2 из сети, за счет чего реализуется снижение электромагнитных потерь в двигателе в режиме преодоления нагрузки.
Таким образом, снижение механических и электромагнитных потерь в сдвоенном асинхронном электродвигателе при пуске и в режиме преодоления нагрузки обеспечит повышение его КПД.
Сдвоенный асинхронный электродвигатель, содержащий два ротора с короткозамкнутыми обмотками, неподвижный статор и подвижный статор, отличающийся тем, что роторы расположены на разных валах, подвижный статор жестко соединен с ротором, относящимся к неподвижному статору, а каждый из статоров подключен к сети через индивидуальный преобразователь частоты, включающий измерительную систему и регулятор скорости.
www.findpatent.ru
Принцип действия, подключение и работа в разных режимах трехфазного электродвигателя | ProElectrika.com
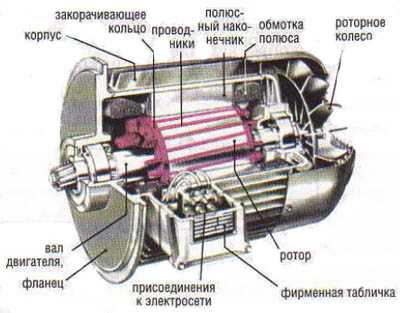
Электродвигателем называется устройство, преобразующее электрическую энергию, получаемую из сети распределения, в механическую энергию вращения. Любой электродвигатель состоит из корпуса, защищающего устройство от пыли и влаги, неподвижной части (статора), жёстко скреплённой с корпусом, имеющей неподвижные обмотки и магнитопроводы, и вращающейся части, называемой ротором. Ротор жёстко насажен на вал, который вращается в двух подшипниковых узлах (переднем и заднем), конец вала выведен наружу и имеет шпоночную канавку для закрепления шкивов или шестерён привода.
Подшипниковые узлы находятся в двух съёмных крышках, которые закрывают корпус с торцов и стягиваются между собой длинными шпильками (как правило, тремя-четырьмя). На заднем конце вала закрепляется крыльчатка вентилятора, который служит для обдува и охлаждения обмоток. Вентилятор прикрывается крышкой с отверстиями для выхода воздуха. Снаружи на корпусе закрепляется коммутационная коробка, внутри которой находятся клеммы подключения. Коробка герметично (через резиновую прокладку) закрывается крышкой для защиты клемм подключения от влаги и пыли.
Конструкция электродвигателя весьма удобна для обслуживания и ремонта – двигатель легко разбирается, обеспечивая доступ к любой части, и собирается.
Принцип работы трёхфазного двигателя
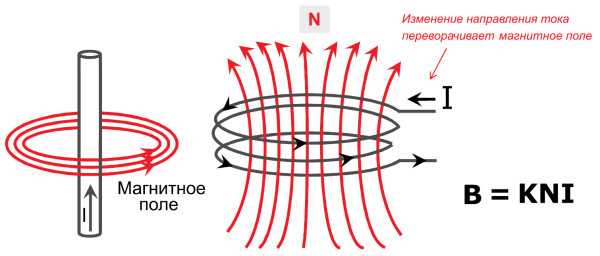
Одним из главных преимуществ трёхфазной системы электроснабжения является то, что из-за сдвига фаз синусоид тока и напряжения сети на 120 градусов, такая система способна создавать «вращающееся» электромагнитное поле. Если мы на неподвижном статоре расположим три обмотки с магнитомягким (это материал, который легко, то есть с минимальными потерями, перемагничивается) сердечником и подадим напряжение на обмотки последовательно от трёх фаз, то ток обмоток начнёт намагничивать сердечники, создавая как бы бегущее по окружности магнитное поле. Это поле в каждом сердечнике синусоидально пульсирует, а во всех трёх создаёт эффект вращения.
Можно подсчитать и угловую скорость вращения магнитного поля при трёх обмотках, расположенных по окружности через 120 градусов, она равна частоте переменного тока – 50 герц, или 50 оборотов в секунду. Чтобы привести к привычным для нас оборотам в минуту, которыми измеряют скорость вращения вала электродвигателя, нужно 50 оборотов в секунду умножить на 60 (число секунд в минуте), получим 3 000 оборотов в минуту (об/мин).
Отметим, что скорость вращения магнитного поля в статоре можно легко понизить чисто конструктивными методами, например, расположить по окружности не три, а шесть обмоток (сделать шесть магнитных полюсов), расположив их по окружности через 60 градусов, причём 1 и 4 обмотки подключить к одной фазе, 2 и 5 – к другой, а 3-ю и 6-ю – к третьей. Тогда скорость вращения магнитного поля понизится вдвое и составит 1500 об/мин. Аналогично увеличив число магнитных полюсов до 12 и расположив их через 30 градусов по окружности, мы понизим скорость вращения магнитного поля ещё раз вдвое – до 750 об/мин.
Запомним, что электродвигатели переменного тока работают со скоростью, связанной с частотой сети. И для каждой частоты имеется свой ряд скоростей, и величины членов ряда кратны между собой одному числу, например – двойке. (Оговоримся, что могут быть и другие числа кратности, например – 3)
Синхронные электродвигатели
Теперь, если мы в качестве ротора закрепим на валу двигателя постоянный магнит с двумя полюсами, то в бегущем магнитном поле вал начнёт вращаться со скоростью поля. Такие двигатели называют синхронными.
Иногда применяются двигатели с постоянным магнитом в роли ротора, как правило, это маломощные моторчики, к примеру, так выполнен двигатель центробежного насоса слива стиральной машины. Но для мощных моторов трудно изготовить мощный постоянный магнит, гораздо проще применить электромагнит. В этом случае ротор представляет собой, набранный из пластин магнитомягкой стали, сердечник специальной формы, на который намотана обмотка.
Ток на обмотку ротора подаётся из сети через устройство, называемое коллектор. Коллектор – это медные, изолированные друг от друга, два или три (для трёхфазной обмотки) кольца на валу, которых касаются угольные подпружиненные щётки. Кольца соединены с началом и концом обмотки. Напряжение из сети подаётся к щёткам, и через контактные кольца поступает на обмотку ротора. Такой электродвигатель называется синхронный, потому что имеет число оборотов равное числу оборотов вращающегося магнитного поля статора.
(Синхронный электродвигатель переменного тока для двухфазной и многофазной сети был запатентован Н. Тесла – американским учёным, изобретателем.)
Однако коллекторы электродвигателей имеют ряд недостатков, угольные щётки при работе искрят (что особо неприятно во взрывоопасной среде), подгорают, из-за чего пропадает контакт (кольца приходится периодически зачищать от нагара). Щётки истираются и требуют замены. Иногда щётки зависают на пружинах и контакт пропадает.
Асинхронные электродвигатели
Изобретательская мысль продолжала работать, и наш соотечественник М. О. Доливо – Добровольский придумал, как можно избавиться от коллектора, он предложил обмотку ротора выполнить в виде короткозамкнутых витков, ток в которых будет возбуждаться переменным магнитным полем статора. Конструктивно решение обмотки ротора представляло собой два кольца, соединённых между собой поперечными проводниками, наподобие «беличьего колеса» – известная «игрушка» для зверька, в которой белка может бесконечно бегать. Такой двигатель назвали – двигатель с короткозамкнутым ротором.
Работает он так – в момент пуска переменное магнитное поле статора возбуждает в проводниках «беличьего колеса» сильный ток, который намагничивает сердечник ротора и последний притягивается магнитами статора и начинает вращаться. Поскольку для появления тока в замкнутых витках ротора необходимо, чтобы магнитное поле менялось, (при синхронном вращении ротора бегущее магнитное поле статора, воздействующее на ротор, на роторе не меняется), ротор будет вращаться с несколько меньшей скоростью, чем вращается магнитное поле статора. Вследствие этого «запаздывания» такой двигатель назвали асинхронный. А разницу во вращении ротора относительно магнитного поля статора назвали скольжением.
Скольжение асинхронного двигателя – величина переменная, в момент пуска оно максимально, затем начинает уменьшаться и на холостом ходу становится минимальным (около 3%). При наличии нагрузки на валу – скольжение ротора увеличивается и растёт с ростом нагрузки (максимум 7%). Если мы посмотрим на паспортные данные асинхронных двигателей – то увидим, что номинальное число оборотов двигателя указанное в паспорте и на табличке двигателя всегда будет меньше определённых нами ранее величин – вместо 3 000 об/мин будет около 2850, вместо 1500 будет 1470, вместо 750 – 725. Эта разница как раз и определяет скольжение.
Трёхфазный асинхронный двигатель с короткозамкнутым ротором
Конструкция данного двигателя оказалась настолько удачной, что сегодня подавляющее большинство электроприводов в мире сделаны на основе асинхронных трёхфазных двигателей с короткозамкнутым ротором. Именно поэтому владельцы усадьб, в которых имеется техника с электроприводами – насосы, электропилы, различные станки и т. д., стремятся провести себе «три фазы».

Достоинства этих двигателей:
- Исключительная простота, надёжность и долговечность.
- Удобство обслуживания и ремонта двигателей.
- Возможность менять направление вращения ротора простым переключением любых двух фазных проводов.
- Возможность работы в режиме генератора, что позволяет применять электромагнитное торможение, при котором мотор начнёт отдавать энергию в сеть.
Однако это достоинство может быть и недостатком. При замене силовых кабелей и розеток нужно особое внимание уделять оборудованию, как оно было подключено. Нередки такие случаи, какой произошёл в детском саду, когда там понадобилось заменить силовой кабель на более мощный. После окончания работ, на кухне мясорубки и овощерезки перестали работать, так как их рабочие валы стали вращаться в обратном направлении. А в прачечной механику гладильного барабана вообще заклинило. А всё оттого, что при монтаже кабеля были перепутаны какие-то два фазных провода.
При проведении монтажных работ это нужно учитывать и всегда проверять на каком-либо некритичном двигателе правильность фазировки проводов. Потому что есть такое оборудование, которое может выйти из строя при неверной фазировке.
Недостатки асинхронных электродвигателей
Но наряду с достоинствами эти двигатели, разумеется, имеют и недостатки. Это, во-первых, большой пусковой ток, который превышает номинальный в 4-5 раз. Последнее обязательно необходимо учитывать при установке автоматов защиты для двигателя – ставить автоматы класса «D». И, во-вторых, малый момент на валу при пуске. Для некоторых механизмов с большой инерцией приходится ставить более мощный, чем это требуется двигатель.
Подключение и работа трехфазного электродвигателя
Теперь о подключении трёхфазных двигателей к сети. В коммутационной коробке на двигателе концы трёх обмоток выведены на шесть клемм. Там же имеется дополнительная клемма для нулевого провода. Клемма заземления может находиться на корпусе двигателя рядом с лапками или фланцем крепления.
Соединение обмоток может быть произведено двумя способами, так называемыми «звездой» или «треугольником».Начала обмоток в двигателе в клеммной коробке обычно маркируются как С1,С2 и С3. Концы обмоток соответственно С4, С5 и С6. Соответственно соединение звездой производится так, концы обмоток соединяются между собой перемычкой, на клеммы С1, С2 и С3 соответственно соединяются с фазными проводами L1,L2 и L3.
Иногда концы обмоток присоединяют к нулевому проводу, но это не обязательно, так как нагрузка по фазам в двигателе равномерная и по нулевому проводу никакого тока не будет.
Соединение треугольником – это когда соединяются концы и начала обмоток последовательно и к точкам соединения подаются фазы. То есть соединяются С1, С5 и L1; С2, С6 и L2; С3, С4 и L3. Нулевой провод не задействуется.
При этом нужно учитывать, что при соединении звездой на обмотки статора будет подано фазной напряжение, а при соединении треугольником – линейное, которое в 1,7 раза выше фазного. Это нужно учитывать, сверяясь с маркировкой на двигателе, где так и указывается – двигатель 220/380 или 127/220. Последний двигатель в трёхфазной сети 220/380 с высокой вероятностью сгорит.
Особых преимуществ у тех или иных схем включения нет, за исключением повышения мощности при включении треугольником, за счёт работы при более высоком линейном напряжении. Однако как следствие этого, при соединении треугольником пусковой ток значительно выше, чем при соединении звездой. Для его понижения иногда применяют релейный автомат, который в момент пуска соединяет обмотки звездой, а в дальнейшем переключает соединение на треугольник.
Работа трёхфазного асинхронного двигателя с КЗ-ротором при обрыве одной фазы
Вопрос, имеющий сугубо практический интерес, – что произойдёт с трёхфазным асинхронным двигателем при обрыве одной из фаз?Если такое произойдёт в момент работы двигателя, то он продолжит работу при любом типе соединения обмоток. Однако мощность его снизится примерно наполовину. И если нагрузка останется максимальной, – неизбежен перегрев работающих обмоток.
Нужно твёрдо усвоить всем людям, имеющим дело с электродвигателями, что любая механическая перегрузка любого электродвигателя вызывает перегрев и сгорание обмоток. А если жёстко застопорить ротор, что бывает при поломках механизмов, которые приводит в движение двигатель, то попытка включить такой электродвигатель вызовет короткое замыкание в сети со всеми вытекающими последствиями.
А вот запустить двигатель при обрыве одной из фаз можно только при включении обмоток звездой и при подключенном нулевом проводе. Опять-таки мощность двигателя при этом уменьшается наполовину со всеми вытекающими последствиями.
Возможность работы трёхфазного асинхронного двигателя в однофазной сети
Этот вопрос довольно часто встречается на практике, например, у вас есть насос с трёхфазным асинхронным двигателем, и вам надо его временно включить, вы согласны даже на то, что мощность насоса понизится, а электросеть у вас в хозяйстве однофазная.Данный вопрос сводится к другому – можно ли при однофазной сети получить вращающееся магнитное поле?Ответ – и да, и нет, одновременно.Да, потому что вращающийся ротор двигателя (если его раскрутить рукой) продолжит вращение и работу.Нет, потому что запустить двигатель сам по себе – не удастся.
Прибегая к аналогии, можно представить кривошипно-шатунный механизм двигателя внутреннего сгорания с одним цилиндром. Поршень механизма находится в верхней мёртвой точке. Можно ли заставить механизм начать работу, нажимая сверху на поршень? Нет! Нужно сначала вывести механизм из мёртвой точки, слегка провернув вал. Причём, в какую сторону вал вы провернёте, в ту сторону и начнётся вращение.
Точно так же в однофазном электродвигателе переменного тока – изначально не определено направление вращения – в какую сторону ему начать крутиться? Следовательно, нужно поместить ещё одну пусковую обмотку с какой либо стороны двигателя. И в этой пусковой обмотке сдвинуть ток по фазе на столько градусов, в какой мере эта обмотка сдвинута в двигателе относительно основной. Так и устроены однофазные двигатели переменного тока, для запуска у них служит пусковая обмотка, которая впоследствии может отключаться. Иногда такие двигатели называют двухфазными.
В трёхфазном асинхронном двигателе такой пусковой обмоткой может служить одна из трёх обмоток. Только включить её нужно через фазосдвигающее устройство, которым может быть или индуктивное сопротивление (катушка на сердечнике) либо ёмкостное – конденсатор. Наиболее распространено применение конденсаторного сдвига.
Для начала нужно посмотреть, на какое напряжение рассчитан трёхфазный двигатель. Если у вас напряжение сети 220 вольт, а двигатель рассчитан на 127/220 вольт, – то вам нужно соединить обмотки двигателя треугольником. А если у вас двигатель 220/380 вольт, – то нужно соединить обмотки звездой.Далее нулевой провод однофазной сети подключаем к одному (из трёх) выводу обмоток, ко второму выводу подключим фазный провод, а к третьему выводу ответвление от фазного провода через конденсатор.После этого запускаем двигатель. Работать он будет с потерей мощности наполовину, примерно так же, как и при обрыве одной из фаз.

Как определить необходимую емкость конденсатора?
Если у вас обмотки соединены звездой, то формула для расчёта ёмкости конденсатора выглядит так:
С = 2800 I/U
При соединении обмоток двигателя треугольником формула выглядит так:
С = 4800 I/U
где С – ёмкость конденсатора в микрофарадах, I – рабочий ток двигателя в амперах, U – напряжение сети в вольтах.
Добавим, что при выборе конденсатора нужно не забыть проверить напряжение, на которое он рассчитан. Оно должно быть не менее 400 вольт.Конденсаторный сдвиг фазы – наиболее распространён из-за доступности и дешевизны. Но имеются и другие способы запуска трёхфазных двигателей в однофазной сети, вплоть до применения электронных преобразователей. Подробнее о подключении трехфазного двигателя 380 в сеть 220 В
proelectrika.com
3. ИНСТРУКЦИЯ ПО ЭКСПЛУАТАЦИИ ТРЁХФАЗНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
ИНСТРУКЦИЯ
ПО МОНТАЖУ И ЭКСПЛУАТАЦИИ ТРЕХФАЗНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
1. ТРЕБОВАНИЯ БЕЗОПАСНОСТИ.
К монтажу и обслуживанию двигателей допускаются лица, прошедшие технический инструктаж.
Запрещается эксплуатация двигателей без надежного заземления и крепления. Для заземления следует использовать только предусмотренные на двигателях специальные заземляющие зажимы.
Запрещается монтаж, обслуживание и демонтаж двигателей под напряжением. Запрещается работа двигателей со снятыми кожухом вентилятора и крышкой клемной коробки.
2. ПОДГОТОВКА К МОНТАЖУ.
Проверить соответствие напряжения и частоты питающей сети данным, указанным на фирменной табличке двигателя.
Удалить смазку с законсервированных частей двигателя. Убедиться в свободном вращении ротора от руки. Измерить сопротивление изоляции обмоток статора и ротора (только для двигателей с фазным ротором) относительно корпуса. Если сопротивление ниже 0,5 МОм, двигатель просушить. Динамически отбалансировать с полушпонкой детали привода, устанавливаемые на конце вала.
3. МОНТАЖ.
При установке двигателя предусмотреть свободный приток и отвод охлаждающего воздуха.
Во избежание повреждения подшипников при насадке деталей привода на вал необходимо обеспечить упор для вала с противоположной стороны. Двигатель укрепить на прочном фундаменте или соответствующем основании.
При соединении двигателя с приводным механизмом необходимо обеспечить соосность и параллельность соединения валов. Допустимая несоосность валов не более 0,2 мм.
Для привода с ременной передачей необходимо обеспечить правильное взаимное расположение валов двигателя и приводного механизма. Минимальный диаметр шкива на валу и максимально допустимое натяжение ремней определять по действующим нормам. Нагрузку второго конца вала производить только посредством эластичной муфты.
4. ПОДГОТОВКА К РАБОТЕ.
По окончании монтажа необходимо проверить правильность подключения двигателя к сети по схеме на крышке коробки выводов и паспорта (шильдика).
Проверить надежность затяжки контактных соединений в коробке выводов, крепежных соединений и уплотнений в штуцерах, исправность заземления.
Для проверки правильности монтажа, работы и направления вращения привода произвести пробный пуск двигателя на холостом ходу. Для изменения направления вращения двигателя необходимо поменять местами два любых провода питающего кабеля.
После пуска на холостом ходу и устранения замеченных недостатков произвести пуск двигателя под нагрузкой.
5. В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ НЕОБХОДИМО:
- вести общее наблюдение за работой двигателя с целью контроля за нормальным техническим состоянием,
- систематически производить техническое обслуживание (периодичность - не реже одного раза в два месяца),
- производить текущий ремонт при замеченных отклонениях величины нагрева станины, уровня шума и вибрации и других отклонениях в работе двигателя, но не реже одного раза в год.
6. ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ.
При техническом обслуживании двигателя необходимо производить наружный осмотр, очищать двигатель от загрязнений, проверять надежность заземления и состояние контактов в коробке выводов, измерять сопротивление изоляции.
Проверять механическое крепление двигателя к месту установки и соединение с приводным механизмом.
7. ПРИ ТЕКУЩЕМ РЕМОНТЕ НЕОБХОДИМО:
Производить демонтаж и разборку двигателя, промывку, чистку и сушку деталей. Производить осмотр подшипников, статора и ротора для обнаружения механических повреждений, выявления деталей, подлежащих замене, восстановлению и пригонке.
Производить подпитку войлочных уплотнений по линии вала трансформаторным маслом, через 3000 часов работы, но не реже одного раза в год.
Для двигателей с открытыми подшипниками производить пополнение или полную замену смазки через 6000 - 10000 часов работы, но не реже одного раза в два года. Для пополнения использовать только консистентные смазки на основе минеральных масел с литиевым загустителем.
Замену подшипников производить при наработке свыше 20000 часов и при повышенном подшипниковом стуке, шуме при работе двигателя, задевании ротора о статор, наличии механических повреждений. Подшипники снимать с вала только при помощи съемника.
8. ХРАНЕНИЕ.
Хранить двигатели можно в таре или без нее в закрытых вентилируемых помещениях, в атмосфере которых не содержатся кислотных, щелочных и других паров, вредно действующих на изоляцию и покрытия.
Резкие колебания температуры и влажности воздуха, вызывающие образование конденсата (росы) недопустимы.
granat-es.ru








Видеоматериалы
Опыт пилотных регионов, где соцнормы на электроэнергию уже введены, показывает: граждане платить стали меньше
Подробнее...С начала года из ветхого и аварийного жилья в республике были переселены десятки семей
Подробнее...Более 10-ти миллионов рублей направлено на капитальный ремонт многоквартирных домов в Лескенском районе
Подробнее...Актуальные темы
ОТЧЕТ о деятельности министерства энергетики, ЖКХ и тарифной политики Кабардино-Балкарской Республики в сфере государственного регулирования и контроля цен и тарифов в 2012 году и об основных задачах на 2013 год
Подробнее...Предложения организаций, осуществляющих регулируемую деятельность о размере подлежащих государственному регулированию цен (тарифов) на 2013 год
Подробнее...
КОНТАКТЫ
360051, КБР, г. Нальчик
ул. Горького, 4
тел: 8 (8662) 40-93-82
факс: 8 (8662) 47-31-81
e-mail:
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
![]()
![]()






