
Синхронный и асинхронный двигатель: отличия, принцип работы, применение
Классификация двигателей основывается на разных параметрах. По одному из них, различают синхронный и асинхронный двигатель. Отличия приборов, общая характеристика и принцип работы описаны в статье.
Синхронный двигатель
Этот тип двигателя способен работать одновременно и в качестве генератора, и как, собственно, двигатель. Его устройство сродни синхронному генератору. Характерной особенностью двигателя является неизменяемая частота роторного вращения от нагрузки.
Эти виды двигателей широко применяются во многих сферах, например, для электрических проводов, которым необходима постоянная скорость.

Принцип работы синхронного двигателя
В основу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Принцип работы синхронного двигателя включает в себя (кратковременно) и асинхронный режим, который обычно применяют для разгона до необходимой (то есть номинальной) скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. После достижения необходимой скорости индуктор начинают питать постоянным током.
Преимущества и недостатки
Основными минусами этого вида двигателя являются:
- необходимость питания обмотки постоянным током;
- сложность запуска;
- скользящий контакт.
Большинство генераторов, где бы они ни использовались, являются синхронными. Преимуществами таких двигателей в целом являются:
Асинхронный двигатель
Данный вид устройста представляет механизм, направленный на трансформацию электрической энергии переменного тока в механическую. Из самого названия «асинхронный» можно сделать вывод, что речь идет о неодновременном процессе. И действительно, частота вращения магнитного поля статора здесь выше роторной всегда.
Такое устройство состоит из статора цилиндрической формы и ротора, в зависимости от вида которого асинхронные двигатели короткозамкнутые могут быть и с фазным ротором.

Принцип действия
Работа двигателя осуществляется на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
Резюмируем теперь, чем отличается синхронный двигатель от асинхронного. Чем объясняется широкое применение одного типа и ограниченное — другого?
Синхронный и асинхронный двигатель: отличия
Отличие работы двигателей — в роторе. У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор. Их скорость получается одинаковой. Отсюда и название — синхронный.
 В нем можно добиться, в отличие от асинхронного, даже опережения напряжения по фазам. Тогда устройство, подобно батареям конденсатора, может применяться для увеличения мощности.
В нем можно добиться, в отличие от асинхронного, даже опережения напряжения по фазам. Тогда устройство, подобно батареям конденсатора, может применяться для увеличения мощности.
Асинхронные двигатели, в свою очередь, просты и надежны, но их недостатком является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Если рассматривать частоту вращения, то имеют и здесь синхронный и асинхронный двигатель отличия. В синхронном типе этот показатель является постоянным, в отличие от асинхронного. Поэтому первый используют там, где необходима постоянная скорость и полная управляемость, например, в насосах, вентиляторах и компрессорах.
Выявить на том или ином устройстве наличие рассматриваемых типов приборов очень просто. На асинхронном двигателе будет не круглое число оборотов (например, девятьсот тридцать в минуту), в то время как на синхронном — круглое (например, тысяча оборотов в минуту).
И те, и другие моторы управляются достаточно сложно. Синхронный тип имеет жесткую характеристику механики: при любой меняющейся нагрузке на вал мотора частота вращения будет одной и той же. При этом нагрузка, конечно, должна меняться с учетом того, чтобы двигатель способен ее выдержать, иначе это приведет к поломке механизма.

Так устроен синхронный и асинхронный двигатель. Отличия обоих видов обуславливают сферу их использования, когда один вид справляется с задачей оптимальным образом, для другого это будет проблематичным. В то же время можно встретить и комбинированные механизмы.
Разница между синхронным и асинхронным двигателем — Разница Между
Разница Между 2020
Ключевая разница: Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока. В синхронном электродвигателе вращение вала синхронизировано с
Содержание:
Ключевая разница: Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока. В синхронном электродвигателе вращение вала синхронизировано с частотой питающего тока. Асинхронный двигатель — это электродвигатель переменного тока, в котором электрический ток в роторе создается электромагнитной индукцией от магнитного поля обмотки статора.

Синхронные и асинхронные двигатели — это два разных типа электродвигателей переменного тока. Электродвигатели переменного тока — это электродвигатели, приводимые в действие переменным током (AC). Двигатель переменного тока обычно состоит из двух основных частей: внешнего стационарного статора и внутреннего ротора. Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока.
Внешний стационарный статор имеет катушки, которые питаются переменным током. Это тогда производит вращающееся магнитное поле. Внутренний ротор прикреплен к выходному валу, который создает второе вращающееся магнитное поле. Магнитное поле ротора может создаваться постоянными магнитами, магнитной индуктивностью или электрическими обмотками постоянного или переменного тока.
В синхронном электродвигателе вращение вала синхронизировано с частотой питающего тока. Период вращения точно равен целому числу циклов переменного тока. Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя. Эти электромагниты создают магнитное поле, которое вращается во времени вместе с колебаниями тока в линии. С другой стороны, ротор с постоянными магнитами или электромагнитами вращается в соответствии с полем статора с той же скоростью. Это обеспечивает второе синхронизированное вращающееся магнитное поле.
Асинхронный двигатель — это электродвигатель переменного тока, в котором электрический ток в роторе создается электромагнитной индукцией от магнитного поля обмотки статора. Асинхронный двигатель также известен как асинхронный двигатель. Ротор в асинхронном двигателе может быть намотанного или короткозамкнутого типа.

В отличие от больших синхронных двигателей, асинхронный двигатель не требует механической коммутации, раздельного возбуждения или самовозбуждения для энергии, передаваемой от статора к ротору.
Основное различие между синхронными и асинхронными двигателями состоит в том, что синхронный двигатель вращается в точной синхронизации с частотой линии. Кроме того, синхронный двигатель не зависит от индукции тока для создания магнитного поля ротора. Асинхронный двигатель, с другой стороны, требует «проскальзывания», чтобы вызвать ток в обмотке ротора, что означает, что ротор должен вращаться немного медленнее, чем чередование переменного тока.
Сравнение между синхронным и асинхронным двигателем:
Синхронный двигатель | Индукционный двигатель | |
Описание | Синхронный электродвигатель представляет собой электродвигатель переменного тока, в котором в установившемся режиме вращение вала синхронизировано с частотой тока питания. | Асинхронный или асинхронный двигатель представляет собой электродвигатель переменного тока, в котором электрический ток в роторе, необходимый для создания крутящего момента, получается посредством электромагнитной индукции от магнитного поля обмотки статора. |
содержать | Многофазные электромагниты переменного тока на статоре двигателя | |
Синхронная скорость | Работать на оборотах = 120f / p | Работать на скорости менее синхронной (об / мин = 120f / p — скольжение) |
Постоянное возбуждение | Синхронные двигатели требуют подачи постоянного тока на обмотки ротора | Асинхронные двигатели не требуют подачи постоянного тока на обмотки ротора. |
Источник постоянного тока | Синхронные двигатели требуют источника питания постоянного тока для возбуждения ротора. | Асинхронные двигатели не требуют источника питания постоянного тока для возбуждения ротора. |
Роторное возбуждение | Синхронные двигатели требуют контактных колец и щеток для подачи возбуждения ротора. | Асинхронные двигатели не требуют контактных колец, но некоторые асинхронные двигатели имеют их для плавного пуска или управления скоростью. |
Обмотки ротора | Синхронные двигатели требуют обмотки ротора | Асинхрон |
отличия по конструкции и принципу работы
Автор Aluarius На чтение 5 мин. Просмотров 978 Опубликовано
Всем известно, что основное предназначение электродвигателей – это преобразование электрической энергии в энергию механическую. Это обнаружил аж в 1821 году Майкл Фарадей, который проводил опыты с магнитами и магнитным полем. С тех пор прошло много времени, а электрические моторы заняли свое основное место в промышленности и быту. Без них сегодня никуда. В настоящее время производители электродвигателей предлагают большое количество моделей, различающихся по конструкции и принципу действия. Это двигатели постоянного и переменного тока, синхронные и асинхронные. Нас сегодня интересует именно синхронный и асинхронный двигатель – отличия.

Чтобы разобраться в отличиях, необходимо рассмотреть конструктивные особенности каждого типа моторов и понять принцип их работы.
Асинхронный электродвигатель
Итак, надо начать с рассмотрения конструкции асинхронной модели. Основное отличие от синхронной – это наличие трех обмоток в статоре, концы которых выводятся для подключения в клеммную коробку. Вторая основная часть мотора – ротор цельного типа, торцы которого замыкаются между собой, отсюда, в принципе, и название – короткозамкнутый.
Дополнением конструкции является крыльчатка, с помощью которой охлаждается двигатель. Устанавливается крыльчатка на вал (ротор) электрического мотора. Сам ротор держится и вращается в подшипниках, установленных в двух крышках корпуса. Обратите внимание, что именно подшипники и являются самым уязвимым местом агрегата. Именно они чаще всего выходят из строя. Правда, заменить их не очень сложно.
Принцип работы
По какому принципу работает асинхронный двигатель? Внутри корпуса мотора, где расположены обмотки статора, возникает магнитное поле, которое действует на ротор, заставляя его вращаться под действием возникшей электродвижущей силы. Но вращение ротора может быть только в том случае, если скорость вращения магнитного поля будет быстрее вращения самого вала двигателя. Если скорости будут одинаковыми, то электродвижущая сила не появится.
Но в любом случае этого произойти не может, потому что здесь несколько причин, сдерживающих скорость вращения ротора.
- Трение в подшипниках.
- Нагрузка на сам вал.
Но самое главное, что магнитные полюса в асинхронном двигателе постоянно меняются, что влияет на смену направлений тока в статоре электродвигателя. То есть, в определенное время ток начинает вращаться «на нас», а в следующий промежуток «от нас». Именно поэтому такие двигатели называются асинхронными, у них просто нет стабильного направления тока.

Что касается скорости вращения ротора, то тут необходимо сделать одно замечание. Этот показатель будет зависеть от того, сколько полюсов одномоментно подключено к питанию. К примеру, максимальная скорость вращения вала будет при двух подключенных полюсах. Чтобы снизить данный показатель, необходимо добавить еще два полюса, то есть, увеличить их вдвое.
И еще один недостаток. Асинхронные двигатели при работе обладают разной скоростью вращения вала. К примеру, на холостом ходу это может быть одна величина, при нагрузке она резко снижается. По сути, получается так, что изменение частоты тока влияет на скорость вала. Другого способа изменить скорость вращения не существует.
Синхронный электродвигатель
Итак, синхронный электродвигатель – это мотор с постоянной скоростью вращения ротора, плюс возможность регулировать эту скорость. Устройство синхронного мотора достаточно сложное. Чтобы в нем разобраться, необходимо рассмотреть фотографию ниже.

Здесь четко показано, что обмотки двигателя располагаются на якоре или роторе агрегата. Концы обмоток выведены и закреплены на токосъемное кольцо, а, точнее, к его секторам. Сам же ток подается на это же кольцо только через графитовые щетки, которые подключены к питающей сети.
Внимание! Концы обмоток подключаются таким образом, что при работе мотора через щетки электрический ток попадал всегда только на одну пару.
У двигателя этой модели больше уязвимых мест, чем у асинхронной.
- Снашиваются графитные щетки.
- Плохой контакт между токосъемным кольцом и щетками за счет ослабления пружины, которая прижимает последние к кольцу (коллектору).
- Изнашиваются подшипники.
- Образование грязевого налета на поверхности токосъемного кольца.
Теперь переходим к другой позиции – принцип работы синхронного электродвигателя. Вращающийся момент внутри мотора образуется за счет взаимодействия магнитного поля, которое образуется в обмотках возбуждения, и тока, проходящего по якорю агрегата. Но тут есть один момент – изменяющееся направление тока (переменного) будет менять и направление вращения магнитного поля двигателя. Правда, смена вращения будет меняться и в корпусе аппарата, и на якоре одновременно. Вот почему вращение ротора мотора всегда происходит с одинаковой скоростью.

Именно поэтому изменить эту величину можно лишь тем, если изменить напряжение подаваемой на щетки электроэнергии. Вспомните пылесосы, где всасываемую мощность изменяют переключателем, который просто соединен с реостатом. А мощность пылесоса зависит от скорости вращения вала крыльчатки, то есть вала электродвигателя. Чем больше скорость, тем больше мощность всасывания.
Но синхронные электродвигатели в промышленности своего основного места не нашли. Здесь в основном используются асинхронные модели.
Какой лучше
Итак, в статье были разобраны устройство и принцип действия двух видов электродвигателей. Говорить о том, что какой-то из них лучше, нельзя. Но отметим, что асинхронные модели проще в конструктивном аспекте. Они надежнее в эксплуатации. Если их не перегружать, то срок службы может быть очень длительным. К сожалению, синхронные виды этим похвастаться не могут. Графитовые щетки быстро изнашиваются, им требуется замена. Но если не уследить, и графит сотрется полностью, то металлические держатели щеток начнут истирать токосъемное кольцо. А его выход из строя – это не только полный выход из строя двигателя, это большое количество искр (трение металла о металл) и возможность появления более серьезных неприятностей.
устройство, принцип работы, режимы работы, пуск
В качестве устройства преобразования электрической энергии в механическую в промышленности и быту используется синхронный электродвигатель. В сравнении с другими типами электрических машин он получил меньшее распространение, но в отведенных сферах является незаменимым фаворитом. В чем особенность синхронных агрегатов и как их применяют на практике, мы рассмотрим в данной статье.
Устройство
Конструктивно синхронный электродвигатель состоит из неподвижного элемента, подвижной части, обмоток различного назначения, может комплектоваться коллекторным узлом. Далее рассмотрим каждую составляющую синхронного агрегата более детально на рабочем примере (рисунок 1).
 Рис. 1. Устройство синхронного электродвигателя
Рис. 1. Устройство синхронного электродвигателя
- Статор или якорь – выполняется из электротехнической стали монолитным или наборным из шихтованного железа. Предназначен для размещения рабочей обмотки, проводит силовые линии электромагнитного поля, формируемого протекающими токами.
- Обмотка на статоре – изготавливается из медных проводников, в зависимости от типа статора синхронного электродвигателя может выполняться различными методами, способами намотки и расположения проводников. Применяется для подачи напряжения питания и формирования рабочего магнитного потока.
- Ротор с обмоткой возбуждения – предназначен для взаимодействия с магнитным полем статора. В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента.
- Вал – используется для передачи вращательного усилия от электродвигателя к подключаемой к нему нагрузке. В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
- Контактные кольца – применяются для подачи питания на обмотки ротора, но устанавливаются не во всех моделях синхронных агрегатов. Питание производиться через специальный преобразователь переменного напряжения в постоянное.
- Корпус – предназначен для защиты от воздействия внешних факторов, обеспечивает синхронному двигателю достаточную прочность и герметичность, в зависимости от условий его эксплуатации.
Принцип работы
В основе работы синхронного электродвигателя лежит взаимодействие магнитного потока, генерируемого рабочими обмотками с постоянным магнитным потоком. Наиболее распространенной моделью синхронной электрической машины является вариант с рабочей обмоткой на статоре и обмоткой возбуждения на роторе.
 Рис. 2. Принцип действия синхронного электродвигателя
Рис. 2. Принцип действия синхронного электродвигателя
Как видите на рисунке 2 выше, в обмотку статора подается трехфазное напряжение из сети, которое формирует переменное магнитное поле. На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
 Рис. 3. Принцип формирования потоков в синхронной электрической машине
Рис. 3. Принцип формирования потоков в синхронной электрической машине
При подаче питания на фазные витки статора электродвигателя первый пик амплитуды тока и ЭДС взаимоиндукции приходиться на фазу A, затем B и фазу C.
На графике показана периодичность чередования кривых в зависимости от времени:
- в точке 1 максимальная ЭДС EA формирует максимальный поток, а электродвижущие силы фаз EB и EC равны между собой и противоположны по знаку, они дополняют результирующую силу.
- в точке 2 пика достигает ЭДС EB, а электродвижущие силы фаз EA и EC становятся равны между собой и противоположны по знаку, они дополняют результирующую силу, в результате чего магнитное поле совершает вращательное движение.
- в точке 3 максимум приходиться на ЭДС EC, а электродвижущие силы фаз EB и EA вместе дополняют результирующую силу и снова смещают вектор поля по часовой стрелке.
Оборот поля статора происходит в течении периода, а за счет того, что ротор обладает собственным электромагнитным усилием постоянным во времени, то он синхронно следует за движением переменного магнитного поля, вращаясь вокруг заданной оси. В результате такого вращения происходит синхронное движение ротора вслед за сменой амплитуды ЭДС в витках рабочих обмоток, за счет этого явления электродвигатель и получил название синхронного. Наличие отдельного питания отразилось и на схематическом обозначении таких электрических машин (рисунок 4) в соответствии с ГОСТ 2.722-68.
 Рис. 4. Схематическое обозначение синхронного электродвигателя
Рис. 4. Схематическое обозначение синхронного электродвигателя
Отличие от асинхронного двигателя
Основным отличием синхронного электродвигателя от асинхронного заключается в принципе преобразования электрической энергии в механическое вращение. У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
В работе классические модели асинхронных электродвигателей с короткозамкнутым ротором:
- плохо переносят перегрузки;
- имеют сложности пуска со значительным усилием;
- меняют скорость вращения, в зависимости от нагруженности рабочего органа.
В некоторой степени эти недостатки преодолевает асинхронный двигатель с фазным ротором, но в полной мере избавиться от недостатков получается лишь синхронному агрегату.
 Рис. 5. Отличие асинхронного от синхронного электродвигателя
Рис. 5. Отличие асинхронного от синхронного электродвигателя
Разновидности
В современной промышленности и бытовых приборах синхронные электродвигатели используются для решения самых разнообразных задач. Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
- питающему напряжению;
- частоте рабочего напряжения;
- количеству оборотов.
В зависимости от способа получения поля ротора выделяют такие типы синхронных электродвигателей:
- С обмоткой возбуждения на роторе – синхронизирующее усилие создается за счет подачи питания от преобразователя.
- С магнитным ротором – на валу устанавливается постоянный магнит, выполняющий те же функции, что и обмотка возбуждении, но без необходимости подпитки (см. рисунок 6).
 Рис. 6. Синхронный электродвигатель с постоянными магнитами
Рис. 6. Синхронный электродвигатель с постоянными магнитами
С реактивным ротором — конструкция выполнена таким образом, что в его сердечнике происходит преломление магнитных линий, приводящее всю конструкцию в движение (см. рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.
 Рис. 7. Пример реактивного ротора
Рис. 7. Пример реактивного ротора
В зависимости от наличия полюсов все синхронные электродвигатели можно подразделить на:
- явнополюсные – в конструкции четко видны обособленные полюса с обмотками, применяются для малых скоростей;
- неявнополюсные – полюс не выделяется, такие модели устанавливают для высоких скоростей;
В зависимости от расположения рабочих обмоток различают прямые (на статоре) и обращенные (рабочие обмотки на роторе).
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Генераторный режим
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора. Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1.На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Способы пуска и схемы подключения
Для запуска синхронного электродвигателя требуется дополнительное поле, независимое от воздействия сети. В то же время, на стартовом этапе запуск представляет собой асинхронный процесс, пока агрегат не достигнет синхронной скорости.
 Рис. 8. Схема пуска синхронного двигателя
Рис. 8. Схема пуска синхронного двигателя
При подаче напряжения на якорь возникает ток в его обмотках и генерация ЭДС в железе ротора, который обеспечивает асинхронное движение до того момента, пока не начнется питание обмоток возбуждения.
Еще одним распространенным вариантом пуска является использование дополнительных генераторов, которые могут располагаться на валу или устанавливаться отдельно. Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
 Рис. 9. Генераторный способ пуска синхронного двигателя
Рис. 9. Генераторный способ пуска синхронного двигателя
Как видите на рисунке 9, начальное вращение мотора М осуществляется за счет генератора G, который призван вывести устройство на подсинхронную скорость. Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Помимо этого на практике используется схема пуска с полупроводниковыми преобразователями. На рисунке 10 приведен способ тиристорного преобразователя и с установкой вращающихся выпрямителей.
 Рис. 10. Тиристорная схема пуска синхронного двигателя
Рис. 10. Тиристорная схема пуска синхронного двигателя
В первом случае запуск синхронного электродвигателя характеризуется нулевым напряжением от преобразователя UD. За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. В цепь обмотки возбуждения вводится резистор R, предназначенный для предотвращения пробоя изоляции. По мере разгона электродвигателя ЭДС скольжения пропорционально снизится и произойдет запирание стабилитронов VD, цепочка заблокируется, и обмотка возбуждения получит питание постоянным напряжением через UD.
Применение
Область применения синхронных электрических машин охватывает производство электрической энергии на электростанциях. По видам генераторы подразделяются на турбинные, дизельные и гидравлические, в зависимости от способа приведения их во вращение.
Также их используют в качестве электродвигателей, которые могут переносить существенные перегрузки в процессе эксплуатации. Такие двигатели устанавливаются на вентиляторах, компрессорах, силовых агрегатах и прочем оборудовании. Отдельная категория электродвигателей применяется в точном оборудовании, где важна синхронизация операций и процессов.
Преимущества и недостатки
К преимуществам такого электродвигателя следует отнести:
- высокий cosφ, приближающийся по величине к 1, что в значительной мере превосходит асинхронные электродвигатели;
- более высокая механическая прочность за счет особенностей конструкции электродвигателя;
- зависимость момента вращения от напряжения линейная, а не квадратичная, поэтому колебания электродвигателя пропорционально снижаются;
- на валу электродвигателя присутствует постоянная скорость, не зависящая от прикладываемой нагрузки;
- может применяться для уменьшения реактивной составляющей в сети.
Среди недостатков синхронных электродвигателей выделяют:
- сложную конструкцию;
- более сложный пуск;
- необходимость использования вспомогательных устройств и блоков;
- такие электродвигатели сложнее регулировать по числу оборотов;
- ремонт и обслуживание также обойдется дороже, чем асинхронные электродвигатели.
Библиографический список
- Ю.А. Макаричев, В.Н. Овсянников «Синхронные машины» 2010
- Абрамович Б.Н., Круглый А.А. «Возбуждение, регулирование и устойчивость синхронных двигателей» 1983
- Андреева Е.Г., Морозова Н.С. «Синхронные машины» 2015
- Глебов И.А. «Проблемы пуска сверхмощных синхронных маши» 1988
- Емец В.Ф., Попков А.А., Петров Г.А. «Синхронные электрические машины» 2009
- Кислицын А.Л. «Синхронные машины» 2000
Чем отличается синхронный двигатель от асинхронного
Прежде чем разобраться, в чём их отличие, необходимо выяснить, что такое электродвигатель? Электродвигатель – это электрическая машина, которая приводится в действие от электроэнергии и служит приводом для других механизмов.
Объяснение принципа работы синхронного электродвигателя для «чайников»
С детства мы помним, что два магнита, если их приблизить друг к другу, в одном случае притягиваются, а в другом отталкиваются. Происходит это, в зависимости от того, что какими сторонами магнитов мы их соединяем, разноимённые полюса притягиваются, а одноимённые отталкиваются. Это – постоянные магниты, у которых магнитное поле присутствует постоянно. Существуют и переменные магниты.
В школьном учебнике по физике есть рисунок, где изображён электромагнит в виде подковы и рамка с полукольцами на концах, которая расположена между его полюсами.
При расположении рамки в горизонтальном положении в пространстве между полюсами магнитов, из-за того, что магнит притягивает разноимённые полюса и отталкивает одноимённые, на рамку подаётся ток, одинакового знака. Вокруг рамки появляется электромагнитное поле (вот пример переменного магнита!), полюса магнитов притягивают рамку, и она поворачивается в вертикальное положение. При достижении вертикали, на рамку подаётся ток противоположного знака, электромагнитное поле рамки меняет полюсность, и полюса постоянного магнита начинают отталкивать рамку, вращая её до горизонтального положения, после чего цикл вращения повторяется.
В этом заключается принцип работы электродвигателя. Причём, примитивного синхронного электродвигателя!
Итак, примитивный синхронный электродвигатель работает, когда на рамку подаётся ток. У настоящего синхронного электродвигателя, роль рамки выполняет ротор с катушками проводов, называемых обмотками, на которые подаётся ток (они служат источниками электромагнитного поля). А роль подковообразного магнита выполняет статор, изготовленный либо из набора постоянных магнитов, либо тоже из катушек проводов (обмоток), которые, при подаче тока являются также источниками электромагнитного поля.
Ротор синхронного электродвигателя будет вращаться с такой же частотой, с какой меняется ток, подаваемый на клеммы обмотки, т.е. синхронно. Отсюда название этого электродвигателя.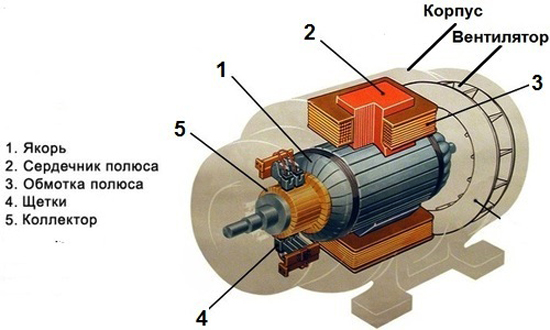
Объяснение принципа работы асинхронного электродвигателя для «чайников»
Вспоминаем описание рисунка в предыдущем примере. Та же рамка, расположенная между полюсами подковообразного магнита, только её концы не имеют полуколец, они соединены между собой.
Теперь начинаем вращать вокруг рамки подковообразный магнит. Вращаем его медленно и наблюдаем за поведением рамки. До некоторых пор рамка остаётся неподвижной, а потом, при повороте магнита на определённый угол, рамка начинает вращение вслед за магнитом. Вращение рамки запаздывает по сравнению со скоростью вращения магнита, т.е. она вращается не синхронно с ним – асинхронно. Вот и получается, что это примитивный асинхронный электродвигатель.
Вообще-то роль магнитов в настоящем асинхронном двигателе служат обмотки, расположенные в пазах статора, на которые подаётся ток. А роль рамки, выполняет ротор, в пазы которого вставлены металлические пластины, соединённые между собой на коротко. Поэтому такой ротор называется короткозамкнутым.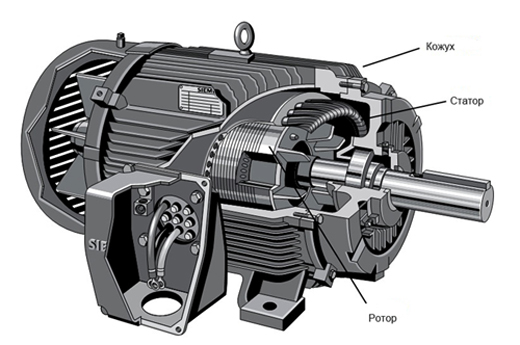
В чём же отличия синхронного и асинхронного электродвигателей?
Если поставить рядом два современных электродвигателя одного и другого типа, то по внешним признакам их отличить трудно даже специалисту.
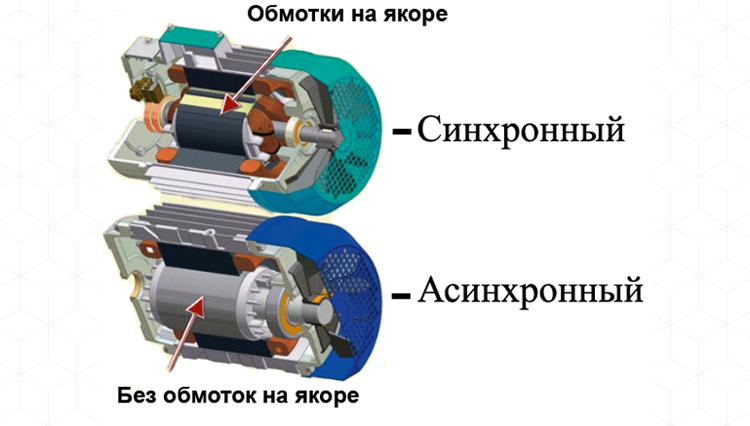
По существу, их главное отличие рассмотрено в приведённых примерах принципов работы этих электродвигателей. Они отличаются по конструкции роторов. Ротор синхронного электродвигателя состоит из обмоток, а ротор асинхронного представляет собой набор пластин.
Статоры одного и другого электродвигателей почти неотличимы и представляют собой набор обмоток, однако, статор синхронного электродвигателя может быть набран из постоянных магнитов.
Обороты синхронного двигателя соответствуют частоте подаваемого на него тока, а обороты асинхронного несколько отстают от частоты тока.
Отличаются они и по сферам применения. Например, синхронные электродвигатели ставят для привода оборудования, которое работает с постоянной скоростью вращения (насосы, компрессоры и т.д.) не снижая её с увеличением нагрузки. А вот асинхронные электродвигатели снижают частоту вращения при увеличении нагрузки.
Синхронные электродвигатели конструктивно сложней, а значит, и дороже асинхронных электродвигателей.
принцип, теория работы и применение
Мы узнали о различных типах электродвигателей в нашей предыдущей статье. Теперь мы начнем узнавать об этих моторах индивидуально. В этой статье мы рассмотрим теорию работы синхронного двигателя и его строение, а так же подскажем где вы можете купить.
Принцип синхронного двигателя
Основной принцип такой же, как и для всех двигателей. Это взаимная индукция между обмоткой статора и ротора, которая делает любой двигатель работоспособным. Кроме того, когда 3-фазная обмотка питается от 3-фазного источника питания, то создается магнитный поток постоянной величины, но вращающийся с синхронной скоростью.

Чтобы легко понять работу синхронного двигателя, давайте рассмотрим только два полюса в статоре и роторе. Как показано на рисунке, статор имеет два полюса Ns и S. Эти полюса, находясь под напряжением, создают вращающееся магнитное поле. Они вращаются с синхронной скоростью и позволяют считать направление вращения по часовой стрелке. Если полюса ротора находятся в положении, показанном на рисунке, то полюса отталкиваются друг от друга. Итак, северный полюс в статоре отталкивает северный полюс ротора. Также южный полюс статора отталкивает юг ротора. Это заставляет ротор вращаться в направлении против часовой стрелки. Таким образом, через полпериода полюса статора меняются местами, что приводит их в положение противоположенных полюсов, которые притягивают друг друга . Т.е. южный полюс статора и северный полюс ротора притягиваются и магнитно сцепляются.

В этом положении полюсы Ns притягивают S, а полюсы Ss притягивают N. Эти противоположные полюса ротора и статора начинают вращаться в том же направлении, что и полюса статора. Это заставляет ротор вращаться в одном направлении и с синхронной скоростью, которая равна скорости вращения полюсов статора. Таким образом, поскольку положение полюсов статора продолжает изменяться с быстрой скоростью и реверсированием, полюса ротора также вращаются и поворачиваются так же, как и статор, таким образом вызывая вращение ротора с постоянной, синхронной скоростью и в том же направлении. Приобрести синхронный двигатель можно, перейдя по ссылке ниже:

Теория работы
Когда на двигатель подается питание переменного тока, полюса статора находятся под напряжением. Это, в свою очередь, притягивает полюса ротора, таким образом, полюса статора и ротора магнитно блокируются. Именно эта блокировка заставляет ротор вращаться с одинаковой синхронной скоростью с полюсами статора. Синхронная скорость вращения задается выражением Ns = 120f / P.
Когда нагрузка на двигатель постепенно увеличивается, ротор, несмотря на то, что он вращается с одинаковой скоростью, имеет тенденцию постепенно снижаться по фазе на некоторый угол, «β», называемый Угол нагрузки или Угол сцепления. Этот угол нагрузки зависит от величины нагрузки, на которую рассчитан двигатель. Другими словами, мы можем интерпретировать, как развиваемый двигателем крутящий момент зависит от угла нагрузки «β».

Электрическую работу синхронного двигателя можно сравнить с передачей мощности механическим валом. На рисунке показаны два шкива, «A» и «B». Предполагается, что шкив «A» и шкив «B» установлены на одном валу. «А» передает мощность от привода через вал, в свою очередь заставляя «В» вращаться, передавая мощность нагрузке.

Два шкива, которые прикреплены к одному валу, можно сравнить с блокировкой между полюсами статора и ротора.
Если нагрузка увеличивается, шкив «B» передает увеличение нагрузки на вал, что проявляется в скручивании вала.
Таким образом, поворот вала можно сравнить с ротором, падающим по фазе со статором.
Угол кручения можно сравнить с углом нагрузки «β». Также, когда нагрузка увеличивается, сила скручивания и угол закручивания увеличиваются. Таким образом, угол нагрузки «β» также увеличивается.
Если нагрузка на шкив «B» увеличивается до такой степени, что он заставляет вал крутиться и ломаться, то передача мощности через вал прекращается, когда вал ломается. Это можно сравнить с ротором, выходящим из синхронизма с полюсами статора.
Таким образом, синхронные двигатели могут работать либо с синхронной скоростью, либо они останавливаются.
Процедура запуска двигателя
Все синхронные двигатели оснащены «обмоткой короткозамкнутого ротора», состоящей из медных прутков, закороченных на обоих концах. Эти обмотки также служат для самостоятельного запуска синхронного двигателя. Во время запуска он легко запускается и действует как асинхронный двигатель. Для запуска синхронного двигателя сетевое напряжение подается на клеммы статора, а ротор остается не возбужденным. Он запускается как асинхронный двигатель, и когда он достигает скорости около 95% от своей синхронной скорости, на ротор подается слабое постоянное возбуждение. В результате чего ротор выравнивается синхронно со статором. В этот момент статор и полюса ротора сцепляются друг с другом и приводят двигатель в синхронность.
Фазовые колебания
Раскачка фазы синхронного двигателя вызваны:
- Различными нагрузками
- Пульсирующими частотами питания.
Когда синхронный двигатель нагружен (например, компрессоры, насосы и т.д.). Когда нагрузка увеличивается, его ротор возвращается назад на угол соединения «β». При дальнейшем увеличении нагрузки этот угол «β» дополнительно увеличивается, чтобы справиться с возросшей нагрузкой. В этой ситуации, если нагрузка внезапно уменьшается, ротор перегружается, а затем оттягивается, чтобы приспособить новую нагрузку к двигателю. Таким образом, ротор начинает колебаться, как маятник, в своем новом положении, соответствующем его новой нагрузке, пытаясь восстановить равновесие. Если период времени этих колебаний совпадает с собственной частотой станка, то устанавливается резонанс, что может вывести машину из синхронизма. Для демпфирования таких колебаний используются «демпфирующие решетки», известные как «обмотки короткозамкнутых клеток».
Применение синхронных двигателей:
- Эти двигатели используются как первичные двигатели (приводы) для центробежных насосов, поршневых компрессоров с ременным приводом, воздуходувок, бумажных фабрик, резиновых фабрик и т.д. Из-за их высокой эффективности и высоких скоростей (об / мин выше 600).
- Низкоскоростные синхронные двигатели (об / мин ниже 600) широко используются для привода многих поршневых насосов. Таких как винтовые и шестеренные насосы, вакуумные насосы, дробилки, машины для прокатки алюминиевой фольги.
- Эти моторы также широко используются на борту судов. Навигационное оборудование корабля, такое как гирокомпас, использует специальный тип синхронного двигателя. Они также используются в качестве первичных двигателей для Viscometer. Это устройства для измерения / регулирования вязкости мазута главного двигателя.
- Большинство фабрик и производств используют бесконечное количество индуктивных нагрузок. Они могут варьироваться от ламповых ламп до мощных асинхронных двигателей. Таким образом, эти индуктивные нагрузки имеют значительный коэффициент мощности отставания. Синхронный двигатель с избыточным возбуждением (синхронный конденсатор), имеющий ведущий коэффициент мощности, используется для улучшения коэффициента мощности этих систем питания.
- Эти двигатели также используются для регулирования напряжения, когда происходит сильное падение / повышение напряжения. Так же когда тяжелая индуктивная нагрузка включается / выключается в конце длинных линий электропередачи.
- Синхронные двигатели могут работать на сверхнизких скоростях с помощью мощных электронных преобразователей, которые генерируют очень низкие частоты. Примерами этих двигателей являются диапазоны мощностью 10 МВт, используемые для привода дробилок, вращающихся печей и шаровых мельниц с регулируемой скоростью.
Синхронный двигатель: принцип работы, устройство, назначение
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
N=60f/p
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.

Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
 асинхронного и б) синхронного двигателя")
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.

Конструкция ротора
Как и любой другой, синхронный электродвигатель состоит из двух основных частей:
- Статор. В нём расположены обмотки. Его еще называют якорем.
- Ротор. На нём устанавливают постоянные магниты или обмотку возбуждения. Его также называют индуктором, из-за его предназначения — создавать магнитное поле).
Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение постоянным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.

Роторы у синхронных электродвигателей переменного тока бывают двух типов, в зависимости от назначения:
- Явнополюсные. Четко видны полюса (катушки). Используют при малых скоростях и большом числе полюсов.
- Неявнополюсные – выглядит как круглая болванка, в прорези на которой уложены провода обмоток. Используют при больших скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.

Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.

Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Виды
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.

Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.

При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время. Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом достоинства и недостатки синхронных электродвигателей заканчиваются. В этой статье мы постарались кратко изложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментариях.
Материалы по теме:
Разница между синхронным и асинхронным двигателем
Разница между синхронным двигателем и асинхронным двигателем объясняется с учетом таких факторов, как его тип, скольжение, потребность в дополнительном источнике питания, требования к контактным кольцам и щеткам, их стоимость, эффективность, коэффициент мощности, источник тока, скорость, самозапуск , влияние на крутящий момент из-за изменения напряжения, их рабочей скорости и различных применений как синхронного, так и асинхронного двигателя.
Различия между синхронным и асинхронным двигателем объясняются ниже в табличной форме.
| BASIS | СИНХРОННЫЙ ДВИГАТЕЛЬ | АСИНХРОННЫЙ ДВИГАТЕЛЬ |
|---|---|---|
| Определение | Синхронный двигатель — это машина, скорость ротора которой равна скорости магнитного поля статора. N = NS = 120f / P | Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей, чем синхронная скорость. N |
| Тип | Бесщеточный двигатель, двигатель с переменным сопротивлением, двигатель с регулируемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. | Асинхронный двигатель переменного тока известен как асинхронный двигатель. |
| Скольжение | Не имеет проскальзывания. Значение скольжения равно нулю. | Есть пробуксовка, поэтому величина пробуксовки не равна нулю. |
| Дополнительный источник питания | Требуется дополнительный источник питания постоянного тока для первоначального вращения ротора, близкого к синхронной скорости. | Не требует дополнительных пусковых источников. |
| Контактное кольцо и щетки | Требуется контактное кольцо и щетки | Контактное кольцо и щетки не требуются. |
| Стоимость | Синхронный двигатель дороже по сравнению с асинхронным двигателем | Менее затратный |
| КПД | КПД выше, чем у асинхронного двигателя. | Менее эффективный |
| Коэффициент мощности | Путем изменения возбуждения коэффициент мощности можно отрегулировать соответственно как запаздывающий, опережающий или единичный. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. |
| Электропитание | Ток подается на ротор синхронного двигателя | Ротор асинхронного двигателя не требует тока. |
| Скорость | Скорость двигателя не зависит от изменения нагрузки. Это постоянно. | Скорость асинхронного двигателя уменьшается с увеличением нагрузки. |
| Самозапуск | Синхронный двигатель не самозапускается | Самозапускается |
| Влияние на крутящий момент | Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя | Изменение приложенного напряжения влияет на крутящий момент асинхронного двигателя |
| Рабочая скорость | Они работают плавно и относительно хорошо на низкой скорости, ниже 300 об / мин. | Двигатель со скоростью выше 600 об / мин работает отлично. |
| Области применения | Синхронные двигатели используются на электростанциях, обрабатывающей промышленности и т. Д., Они также используются в качестве регулятора напряжения. | Используется в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. и т. д. |
Синхронный двигатель — это двигатель, который работает с синхронной скоростью, т.е. скорость ротора равна скорости статора двигателя.Отсюда следует соотношение N = N S = 120f / P, где N — скорость ротора, а Ns — синхронная скорость.
Асинхронный двигатель — это асинхронный двигатель переменного тока. Ротор Асинхронного двигателя вращается со скоростью меньше синхронной, т.е. N
Подробное объяснение разницы между синхронным и асинхронным двигателем приведено ниже.
- Синхронный двигатель — это машина, у которой скорость ротора и скорость магнитного поля статора равны.Асинхронный двигатель — это машина, ротор которой вращается со скоростью меньше синхронной.
- Бесщеточный двигатель, двигатель с регулируемым сопротивлением, двигатель с регулируемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. Асинхронный двигатель переменного тока известен как асинхронный двигатель.
- Синхронный двигатель не имеет скольжения. Значение скольжения равно нулю. Асинхронный двигатель имеет скольжение, поэтому значение скольжения не равно нулю.
- Синхронному двигателю требуется дополнительный источник постоянного тока для первоначального вращения ротора, близкого к синхронной скорости.Асинхронный двигатель не требует дополнительного источника пуска.
- Контактное кольцо и щетки необходимы в синхронном двигателе, тогда как асинхронный двигатель не требует контактного кольца и щеток. Только асинхронный двигатель с обмоткой требует и контактного кольца, и щеток.
- Синхронный двигатель дороже асинхронного двигателя.
- КПД синхронного двигателя больше, чем у асинхронного двигателя.
- Путем изменения возбуждения коэффициент мощности синхронного двигателя может быть соответственно отрегулирован как отстающий, опережающий или единичный, тогда как асинхронный двигатель работает только с отстающим коэффициентом мощности.
- На ротор синхронного двигателя подается ток. Ротор асинхронного двигателя не требует тока.
- Скорость синхронного двигателя не зависит от изменения нагрузки. Это постоянно. Скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель не запускается автоматически, тогда как асинхронный двигатель запускается автоматически.
- Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя, но влияет на крутящий момент асинхронного двигателя.
- Синхронный двигатель работает плавно и относительно хорошо на низкой скорости, которая ниже 300 об / мин, тогда как скорость выше 600 об / мин работа асинхронного двигателя превосходна. Асинхронные двигатели используются в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и лифтах. и т. д.
- Синхронный двигатель используется в различных сферах применения на электростанциях, обрабатывающей промышленности и т. Д. Он также используется в качестве регулятора напряжения.
.
Разница между синхронной и асинхронной передачей (со сравнительной таблицей)
 В предыдущей статье мы обсудили последовательную и параллельную передачу. Как мы знаем, в последовательной передаче данные отправляются бит за битом, так что каждый бит следует за другим. Он бывает двух типов, а именно: , синхронная и асинхронная передача .
В предыдущей статье мы обсудили последовательную и параллельную передачу. Как мы знаем, в последовательной передаче данные отправляются бит за битом, так что каждый бит следует за другим. Он бывает двух типов, а именно: , синхронная и асинхронная передача .
Одно из основных различий заключается в том, что при синхронной передаче отправитель и получатель должны иметь синхронизированные часы перед передачей данных.В то время как для асинхронной передачи не требуются часы, но перед передачей к данным добавляется бит четности.
Кроме того, синхронная передача использует символы синхронизации, в то время как асинхронный метод использует стартовые / стоповые биты, чтобы предупредить модем, когда данные отправляются и когда эти передачи завершены, известны как символы сообщения.
Содержимое: синхронная или асинхронная передача
- Сравнительная таблица
- Определение
- Ключевые отличия
- Заключение
Сравнительная таблица
| Основа для сравнения | Синхронная передача | Асинхронная передача |
|---|---|---|
| Значение | Передача начинается с заголовка блока, который содержит последовательность битов. | Он использует стартовый бит и стоповый бит, предшествующий и следующий за символом соответственно. |
| Способ передачи | Отправляет данные в виде блоков или кадров | Отправляет 1 байт или символ за раз |
| Синхронизация | Присутствует с тем же тактовым импульсом. | Отсутствует |
| Скорость передачи | Быстро | Медленно |
| Разрыв между данными | Не существует | Есть |
| Стоимость | Дорогая | Экономичная |
| Интервал времени | Константа | Случайно |
| Реализуется с помощью | Аппаратное и программное обеспечение | Только аппаратное обеспечение |
| Примеры | Чаты, видеоконференцсвязь, телефонные разговоры и т. Д. | Письма, электронные письма, форумы и т. Д. |
Определение синхронной передачи
В Synchronous Transmission данные передаются в полнодуплексном режиме в виде блоков или кадров. Синхронизация между отправителем и получателем необходима, чтобы отправитель знал, где начинается новый байт (поскольку между данными нет промежутка). Следовательно, каждый блок символов помечается символами синхронизации, и принимающее устройство получает данные, пока не будет идентифицирован специальный конечный символ.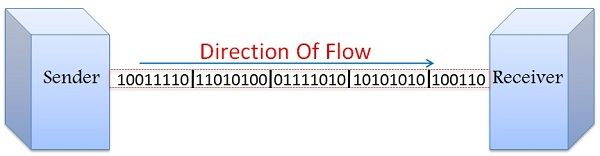 Синхронная передача эффективна, надежна и используется для передачи большого количества данных. Он обеспечивает связь между подключенными устройствами в реальном времени. Чаты, видеоконференцсвязь, телефонные разговоры, а также личное общение — вот некоторые из примеров синхронной передачи.
Синхронная передача эффективна, надежна и используется для передачи большого количества данных. Он обеспечивает связь между подключенными устройствами в реальном времени. Чаты, видеоконференцсвязь, телефонные разговоры, а также личное общение — вот некоторые из примеров синхронной передачи.
Голосовой и широкополосный каналы обычно используются в режимах синхронной передачи, поскольку они обеспечивают более высокую скорость до 1200 бит / с и служат для достижения высокой скорости передачи данных.
Определение асинхронной передачи
При асинхронной передаче данных передаются в полудуплексном режиме, по 1 байту или символу за раз. Он передает данные в непрерывном потоке байтов. В общем, размер отправляемого символа составляет 8 бит, к которым добавляется бит четности, то есть стартовый и стоповый бит, что дает всего 10 бит.
Не требует часов для синхронизации; скорее, он использует биты четности, чтобы сообщить получателю, как интерпретировать данные.Эти биты четности известны как стартовые и стоповые биты, которые управляют передачей данных. 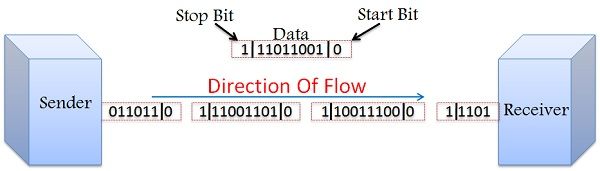 Он использует синхронизацию на основе символов, чтобы принимающий терминал мог синхронизировать себя с получением данных о символе. Это просто, быстро, экономично и не требует двусторонней связи. Письма, электронные письма, форумы, телевидение и радио — вот некоторые из примеров асинхронной передачи.
Он использует синхронизацию на основе символов, чтобы принимающий терминал мог синхронизировать себя с получением данных о символе. Это просто, быстро, экономично и не требует двусторонней связи. Письма, электронные письма, форумы, телевидение и радио — вот некоторые из примеров асинхронной передачи.
Каналы речевого диапазона узкого типа, работающие на более низкой скорости, используются при асинхронной передаче.Здесь передающее устройство работает вручную или с перебоями.
Ключевые различия между синхронной и асинхронной передачей
- При синхронной передаче данные передаются в виде кадров. С другой стороны, при асинхронной передаче данные передаются по 1 байту за раз.
- Синхронная передача требует тактового сигнала между отправителем и получателем, чтобы сообщить получателю о новом байте. Напротив, в асинхронной передаче отправителю и получателю не требуется синхронизирующий сигнал, поскольку отправленные здесь данные имеют прикрепленный к нему бит четности, который указывает начало нового байта.
- Скорость передачи данных при асинхронной передаче ниже, чем при синхронной передаче.
- Асинхронная передача проста и экономична, тогда как синхронная передача сложна и дорога.
- Синхронная передача эффективна и имеет меньшие накладные расходы по сравнению с асинхронной передачей.
- При асинхронной передаче данных линия поддерживает стабильное значение (логическая 1), если данные не передаются по линии. В отличие от синхронной передачи конец данных указывается символом (ами) синхронизации.Помимо символов синхронизации, строка может быть как высокой, так и низкой.
Заключение
Как синхронная, так и асинхронная передача имеют свои преимущества и недостатки. Асинхронный режим прост, экономичен и используется для передачи небольшого количества данных.
И наоборот, синхронная передача используется для передачи большого количества данных, поскольку она эффективна и имеет меньше накладных расходов. Следовательно, мы заключаем, что для передачи данных необходимы как синхронная, так и асинхронная передача.
.
Разница между синхронной и асинхронной передачей (со сравнительной таблицей)
Синхронная и асинхронная передача — это два типа техники последовательной передачи данных. Но решающее различие между синхронной и асинхронной передачей состоит в том, что при синхронной передаче общий тактовый импульс распределяется между передатчиком и приемником, чтобы обеспечить синхронизированную связь.
В отличие от асинхронной передачи, отправитель и получатель имеют свои собственные внутренние часы, поэтому не нуждаются во внешнем общем тактовом импульсе.
Синхронная передача обеспечивает непрерывный поток данных между отправителем и получателем. Однако метод асинхронной передачи не позволяет непрерывный поток данных.
Мы обсудим некоторые другие важные факторы, которые отличают синхронную передачу от асинхронной. Но перед этим посмотрите, какое содержание мы обсудим в этой статье.
Содержание: синхронная передача против асинхронной
- Сравнительная таблица
- Определение
- Ключевые отличия
- Заключение
Таблица сравнения
| Основа для сравнения | Синхронная передача | Асинхронная передача |
|---|---|---|
| Тактовый импульс | Передатчик и приемник используют общий тактовый импульс. | Общий тактовый импульс не используется передатчиком и приемником. |
| Скорость передачи | Быстрая | Сравнительно низкая. |
| Форма передачи данных | Данные отправляются в виде кадров или блоков. | Данные передаются в виде байта или символа. |
| Временной интервал | Константа | Переменная |
| Стоимость | Дорого | Сравнительно дешевле. |
| Эффективность | Более эффективная | Менее эффективная |
| Необходимость внешних часов | Есть | Не существует |
| Требуется стартовый и стоповый бит | Не существует | Есть |
| Схема | Сложная | Сравнительно менее сложная. |
Определение синхронной передачи
Здесь само название указывает, что синхронная передача требует синхронизации между передатчиком и приемником, чтобы обеспечить связь между ними.
В основном, несмотря на наличие внутренних тактовых импульсов, передатчик и приемник совместно используют общий тактовый импульс, чтобы обеспечить синхронизацию связи. Это означает, что данные будут передаваться между передатчиком и приемником только через постоянный интервал времени.
На рисунке ниже представлена синхронная передача между отправителем и получателем:
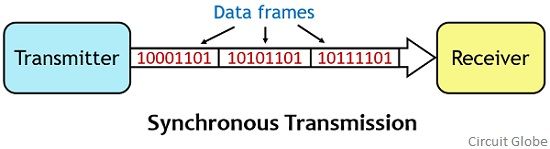
Позволяет передавать данные в виде кадров или блоков. Таким образом, после отправки тактового импульса между передатчиком и приемником может передаваться огромный объем данных.
Этот временной интервал определяется частотой внешнего тактового импульса. Таким образом, в основном при синхронной передаче тактовый импульс решает, когда передавать данные, и для этого и передатчик, и приемник должны быть готовы к обмену данными.
Определение асинхронной передачи
Асинхронная передача — это тип последовательной передачи, которая следует за несинхронизированной формой связи. Таким образом, требуются стартовый и стоповый биты, чтобы сообщить получателю о начале и конце потока данных.
На рисунке ниже показан метод асинхронной передачи:
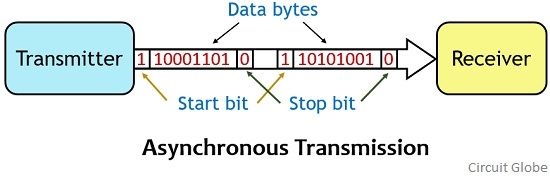
Здесь данные передаются от одного конца к другому в виде байтов или символов. Таким образом, когда передатчик хочет отправить данные, он должен уведомить получателя о том, что он собирается отправить биты данных.
Таким образом, по этой причине перед отправкой фактических данных передатчик отправляет стартовый бит, который уведомляет приемник о передаче.
И после отправки байта данных передатчик отправляет стоповый бит, который показывает завершение данных.Передатчик и приемник в системе асинхронной передачи имеют свои внутренние часы для работы. Но не работайте с общим тактовым импульсом.
Тем самым приводя к неведению о правильной передаче. Следовательно, по этой причине в асинхронной системе связи используются стартовые и стоповые биты. Однако наличие стартового и стопового бита снижает скорость передачи данных в случае асинхронной передачи.
Ключевые различия между синхронной и асинхронной передачей
- Синхронная передача позволяет передавать данные в формате кадра или блока.В то время как при асинхронной передаче байт или символ передается за раз.
- Из-за передачи данных в форме кадров скорость передачи данных довольно высока при синхронной передаче. В то время как при асинхронной передаче скорость передачи данных сравнительно низкая.
- Синхронная связь требует синхронизации между отправителем и получателем, поэтому оба используют общий тактовый импульс. Напротив, асинхронная связь не позволяет синхронизированную связь, и, следовательно, отправитель и получатель имеют свои собственные внутренние часы.
- Благодаря наличию тактового импульса данные в форме кадров могут непрерывно передаваться между отправителем и получателем. В то время как отсутствие общего тактового импульса вызывает существование промежутков между битами данных.
- Синхронная передача не требует стартовых и стоповых битов . В отличие от того, чтобы обеспечить асинхронную передачу между отправителем и получателем, обязательно необходимы стартовые и стоповые биты до и после битов сигнала сообщения.
- Временной интервал передачи остается постоянным между передаваемыми данными. Однако в случае асинхронной передачи существуют переменные временные интервалы между битами данных.
- Система, поддерживающая синхронную передачу, сравнительно сложна , чем система асинхронной передачи.
- Благодаря синхронизированной связи, синхронная передача эффективнее по сравнению с асинхронной передачей.
- Комплексирование системы при синхронной передаче увеличивает стоимость системы. Таким образом, синхронная передача дороже асинхронной передачи.
Заключение
Следовательно, мы можем сказать, что для синхронной передачи требуется внешний тактовый импульс, который используется как передатчиком, так и приемником. Хотя при асинхронной передаче обычно не используются внешние часы.
.
Разница между асинхронным и синхронным
Ключевое отличие: Асинхронный и Синхронный — это два разных метода синхронизации передачи. Основное различие между ними заключается в методах передачи, т.е. синхронные передачи синхронизируются внешними часами; тогда как асинхронные передачи синхронизируются специальными сигналами в среде передачи.
Обмен данными синхронизируется асинхронным и синхронным способом с помощью соответствующих методов сигнализации.В этих режимах данные передаются из одного предназначенного источника в пункт назначения для осуществления связи. В широком смысле асинхронный способ коммуникации — это косвенный способ коммуникации, который проходит через различные способы преобразования; напротив, синхронный способ связи — это прямой путь, который подключается к приемнику.

В режиме асинхронной передачи данных между отправителем и получателем отсутствует общий тактовый сигнал. Отправитель и получатель устанавливают скорость передачи данных, которая в дальнейшем во время передачи не меняется и остается фиксированной.И отправитель, и получатель настраивают свои собственные внутренние каналы для доступа к данным в соответствии с их соглашением. Асинхронное общение и действия происходят вне реального времени. Это можно рассматривать как асинхронные действия, которые происходят всякий раз, когда у соответствующего пользователя есть время для их выполнения.
 При синхронной передаче данных основной отправитель и получатель используют один и тот же тактовый сигнал. Следовательно, отправитель и получатель получают один и тот же тактовый сигнал, для этого требуется специальный тип тактового сигнала.При синхронной передаче данных предполагается, что ведущий или главный отправитель предоставляет тактовый сигнал всем получателям или получателям. Синхронное общение очень похоже на телефонный звонок. Здесь должен быть получатель, иначе разговор не состоится. Синхронное сотрудничество дает немедленный и спонтанный ответ от желаемого получателя. Следовательно, такой тип сотрудничества считается идеальным.
При синхронной передаче данных основной отправитель и получатель используют один и тот же тактовый сигнал. Следовательно, отправитель и получатель получают один и тот же тактовый сигнал, для этого требуется специальный тип тактового сигнала.При синхронной передаче данных предполагается, что ведущий или главный отправитель предоставляет тактовый сигнал всем получателям или получателям. Синхронное общение очень похоже на телефонный звонок. Здесь должен быть получатель, иначе разговор не состоится. Синхронное сотрудничество дает немедленный и спонтанный ответ от желаемого получателя. Следовательно, такой тип сотрудничества считается идеальным.
Следовательно, можно сделать вывод, что и асинхронные, и синхронные различаются по своим схемам передачи сигналов и связи.Синхронные типы получают только отправленный тактовый сигнал, а асинхронные типы получают сигнал синхронизации, который предоставляется перед началом передачи каждого сообщения. Оба типа
.